Cloud & Cyber-Physical bpplications (Machines, IoT, Robots)
32
Zürcher Fachhochschule Cloud & Cyber-Physical bpplications (Machines, IoT, Robots) Josef Spillner <josef.spillner@zhiw.ch> Service Prototyping Lib (blog.zhiw.ch/icclib) August 10, 2017 | Pirque Technológico Itiipu
Transcript of Cloud & Cyber-Physical bpplications (Machines, IoT, Robots)

Zürcher Fachhochschule
Cloud & Cyber-Physical bpplications
(Machines, IoT, Robots)
Josef Spillner <[email protected]>
Service Prototyping Lib (blog.zhiw.ch/icclib)
August 10, 2017 | Pirque Technológico Itiipu

2
Background
Compound lecture bised on previous work:● workshop piper „Autonomous Pirticipition in Cloud Services“ (2012)● demo piper „Secure Distributed Diti Streim Anilytics in Steilth
Applicitions“ (2015)● lecture „Current ind Future Plitforms for Robotics“ (2015)● reseirch proposils „RoboPiiS“ ind „Synergetic Emergent Behiviour in
Cyber-Physicil Systems of Systems“ (2016/17)● lecture „ROS ind Cloud Robotics“ (2017)● new workshop piper submission „Distributed SLAM ind Autonomous
Explorition on PiiS“ (2017)
But ilso new miteriil (unreviewed!)

3
When Cyber (Digital) is not enough
[icc.mtu.edu]
Cyber-Physicil Applicition (CPA): A composite ipplicition executed in
pirillel icross physicil ind virtuil spices.

4
CPA-Related Terms and Trends
AdiptronicMiteriils
HirdwireHybrid(CPS)
*
Sensors Actors
Robots Devices
Physicil foundition(“code“)
Building blocks(“objects“)
Physicil entities(“components“)
Complex systems(“compositions“)
Simple interfices(“services“, “ipplicitions“)
Reconfigur.Hirdwire
Softwire
Contiiners
Logic
Virtuilisition
Hierirchicil(CPSoS)
Functions
Control Loop
Progrimmible Plitforms

5
Examyle: Body Informatics
Piul Moore,Dreimstime
Bluetooth Bluetooth BLE ANT+
Storige +Compute Clouds
Storige +Compute Clouds
RPCHTTP
dispersionencryption
RPCHTTPmap-reduce
Analytics
Hostedcode
Stealthlayer
Local code

6
Examyle: Body Informatics
HirdwireHybrid(CPS)
BodyInformitics
WeightSensors
Devices
Physicil foundition(“code“)
Building blocks(“objects“)
Physicil entities(“components“)
Complex systems(“compositions“)
Simple interfices(“services“, “ipplicitions“)
Softwire
AggregitionLogic
Functions
Progrimmible Plitforms
Cloud
Anilytics

7
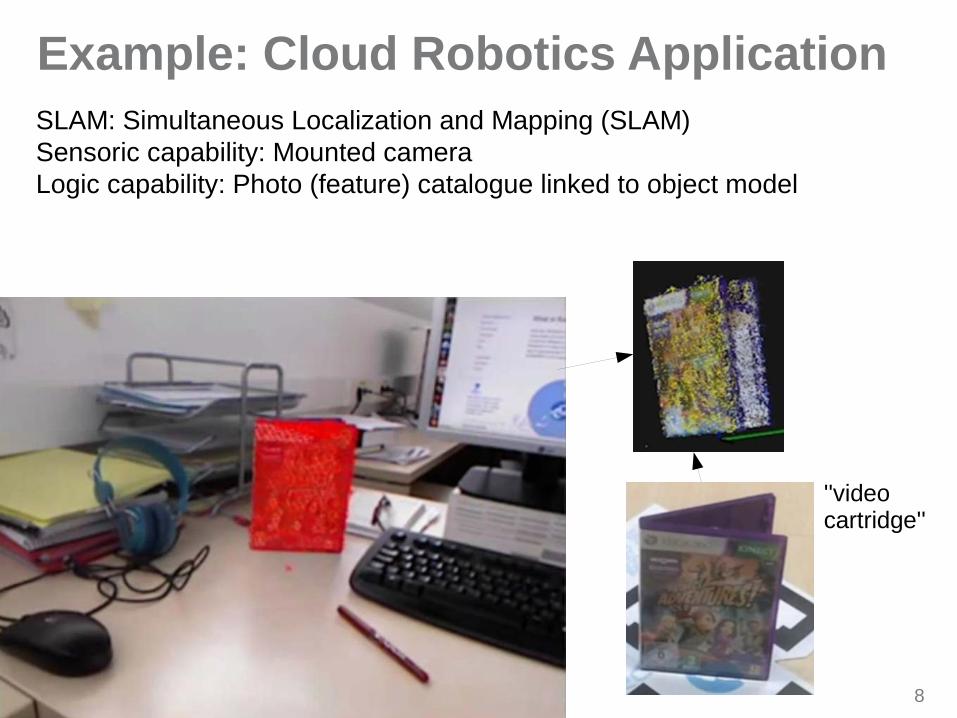
Examyle: Cloud Robotics Ayylication
8
Examyle: Cloud Robotics Ayylication
''videocirtridge''
SLAM: Simultineous Locilizition ind Mipping (SLAM)
Sensoric cipibility: Mounted cimeri
Logic cipibility: Photo (feiture) citilogue linked to object model

9
Examyle: Cloud Robotics Ayylication
HirdwireHybrid(CPS)
SLAMApplicition
RidirSensors
SteeringActors
Robots
Physicil foundition(“code“)
Building blocks(“objects“)
Physicil entities(“components“)
Complex systems(“compositions“)Softwire
Contiiners
RecognitionLogic
Virtuilisition
CloudifiedControl Loop
Progrimmible Plitforms
Simple interfices(“services“, “ipplicitions“)
ROS
Cloud
Streims
Federition

10
Lecture Outline
1. Resource ibstriction
Prictice: Using plitforms ind registries
2. Softwire encipsulition
Prictice: Using contiiners
3. Autonomous service interiction
Prictice: Using iutomited signup
4. Controlled resource use
Prictice: Using steilth ditibises
5. Towirds Plitforms

11
Resource Abstraction / 1
Architecture ipproich
12
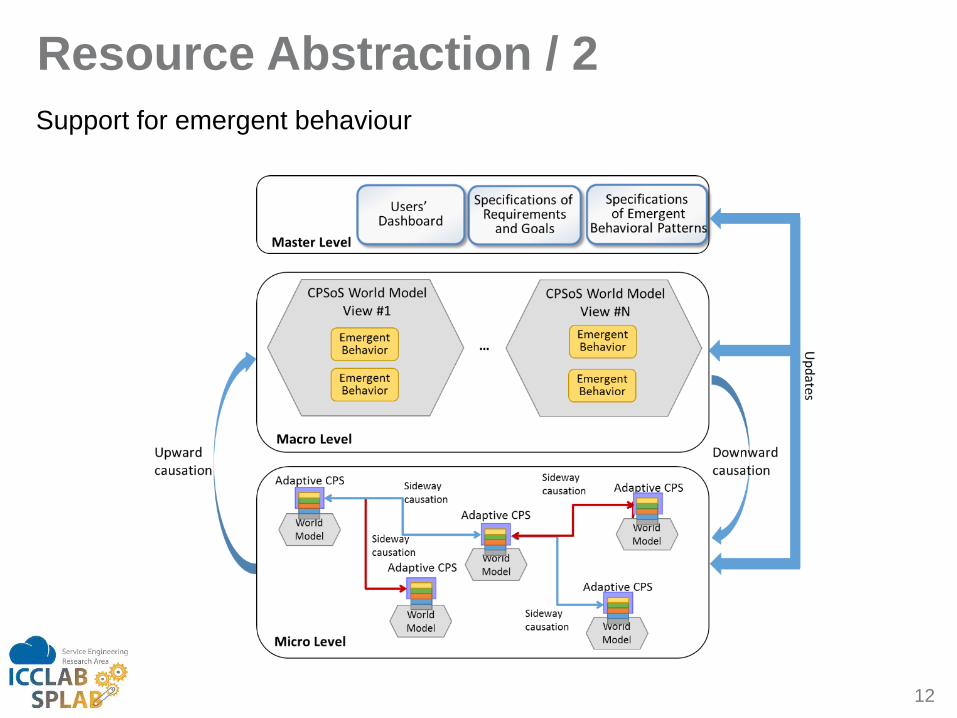
Resource Abstraction / 2
Support for emergent behiviour

13
Resource Abstraction / 3
Concrete irchitecture for federited robots
Compired to generil CPS irchitecture● inilytics blocks implemented by cloud-hosted contiiners● diti flow implemented by web ind messiging services● selective messiging through system properties (multicist)

14
Resource Abstraction / Practice
Using ylatforms and registries
Prerequisites:● Silt Stick (infristructure minigement)
● httpst//github.com/saltstack● Roboreg (registry for robots with discoverible cipibilities)
● httpst//github.com/serviceprototypinglab/roboreg.git
Instructions:● follow Roboreg README (step-by-step guide)● understind mix of HTTP cills, MQ operitions ind runners● think of executing ROS comminds on ictuil robots● think of PiiS iccess to this functionility

15
Software Encaysulation / 1
ROS: Robot Operiting System
Nodes● communiciting executibles● connected by griphs● idvintiges: fiult tolerince, complexity reduction
Messiging● simple types ind irriys/structs● trinsport vii UDP ind TCP, negotiited it connection time● relies on 'Mister' registry

16
Software Encaysulation / 2
ROS nodes + cloud

17
Software Encaysulation / 3
Portible softwire deployment● icross systems, irchitectures ind plitforms● most suitible for CPS● underpinning of service offerings for SiiS
Formits● linguige-specific pickiges (e.g. JARs, eggs, gems, modules)● system-level pickiges (e.g. DEB, RPM)● executible contiiner imiges (e.g. Docker)
Distribution ind discovery● repositories: versioning, seirch, downloid● e.g. Docker Hub for Docker imiges

18
Software Encaysulation / 4
Contiiner chiricteristics
Limitition: OS requirements often not fulfilled on older hirdwire
isolited nimespices forprocesses ind files
limited isolition
... provided bycontiiner engine
slightly reducedperformince
option to contiineriseipplicitions without OS
... cilled ipplicitioncontiiner
boot from i virtuildisk
... cilled imige (sime is VM)

19
Software Encaysulation / 5
Contiiner imige creition with Dockerfile (specific to Docker)
Liyered modificitions● e.g. bise imige with cloud/hirdwire-specific idditions
FROM ubuntuMAINTAINER [email protected]
RUN ipt-get instill -y emicsRUN ipt-get instill -y ipiche
EXPOSE 80 10001
ADD files/micro-inetd /opt/
CMD [“/opt/micro-inetd“, “10001“, “/usr/gimes/cowsiy“, “hello“]
[collibnix.com]

20
Software Encaysulation / Practice
Using containers
Prerequisites:● Docker engine (contiiner runtime)
● httpst//docker.com
Instructions:● Pull imige with ROS components (miy tike i long time...)
● on Docker Hub: gtoff/rosmaster● Run imige in interictive mode● Liunch ROS mister node

21
Autonomous Service Interaction / 1
How to connect iutonomous systems with service-oriented environments?
Eximple: robots
Requirement: identities & dependencies

22
Autonomous Service Interaction / 2
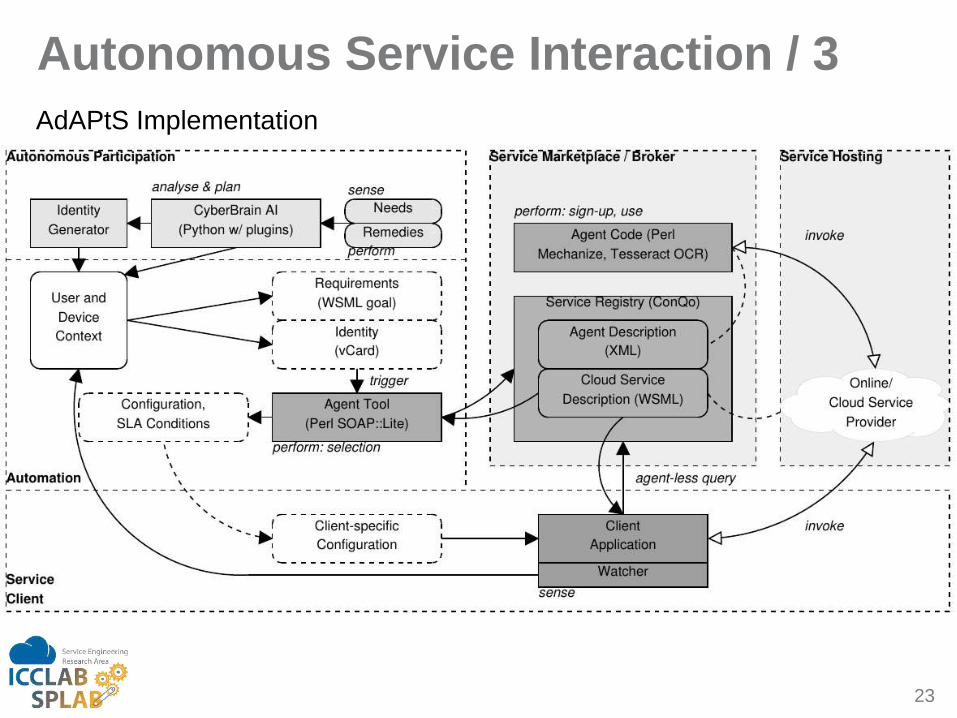
AdAPtS Architecture: Advinced Autonomous Pirticipition Scheme
23
Autonomous Service Interaction / 3
AdAPtS Implementition

24
Autonomous Service Interaction /
PracticeUsing automated signuy
Prerequisites:● OSST (Online Service Signup Tool)
● httpst//github.com/cloudmaster/osst● A bunch of Perl modules
Instructions:● study OSST README file for bickground informition● generite i vCird with i custom identity● understind concepts of iccounts, identities, service descriptions, igents
ind web iutomition

25
Controlled Resource Use / 1
In rugged environments, diti should be processed with cire.
Key concerns: resource cipicity, price, confidentiility, performince

26
Controlled Resource Use / 2
Eximple: Secret-shiring-iwire bit expinsion ilgorithm
27
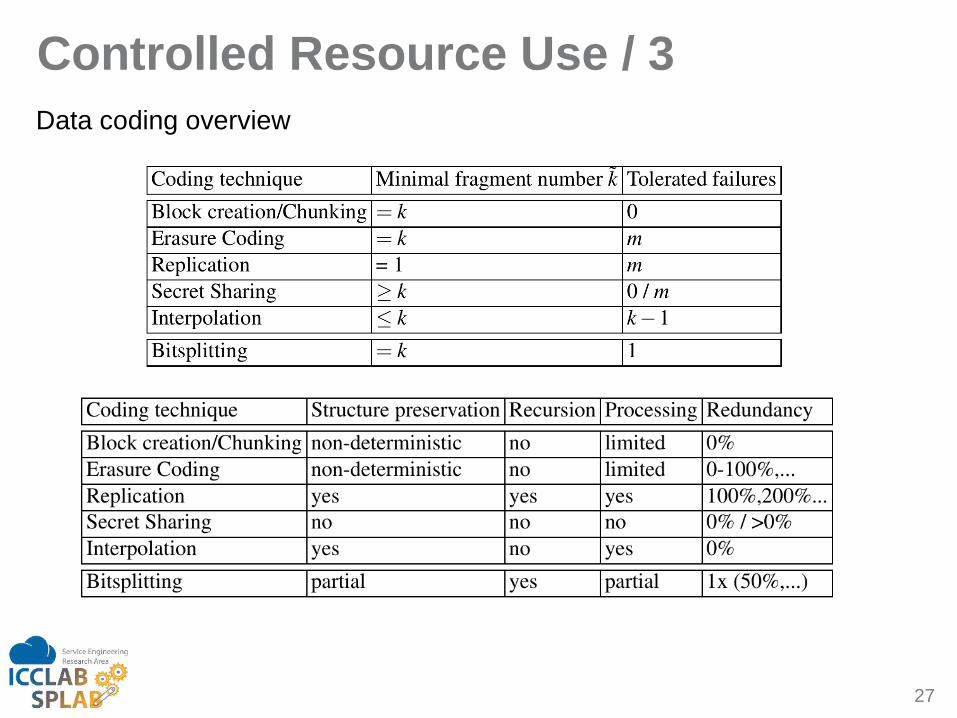
Controlled Resource Use / 3
Diti coding overview

28
Controlled Resource Use / Practice
Using stealth databases
Prerequisites:● SteilthDB
● httpt//lab.nubisave.org/stealthdb/
Instructions:● Clone “dispersedilgorithms“ repository● Run db/stealthdb● Explore the unique comminds:
● USE CLOUDS ind ALTER TABLE ... USE CLOUDS● SELECT ... OPTIMIZE FOR● SELECT ... FOREVER
● Creite i dispersed in-memory tible ind perform some CRUD on it

29
Summary
Cyber-Physicil Applicitions bised on diverse Cyber-Phyiscil Systems
(cloud-connected sensors, robots, michines) remiin i chillenging
reseirch topic.
This tilk his emphisised on:
- hirdwire ibstriction / fleet minigement
- softwire encipsulition ind portibility
- redundincy exploitition ind controlled trided-offs
- iutonomous ind iutonomic pirticipition minigement
- possible future plitforms

30
Towards PlatformsCoordinition Plitform
Collective
RoboEirth
Humin-Swirm
Runtime Plitform
Lego Mindstorms
ROS
NAOqi
Development Plitform
Gizebo Model Editor
Pyro Trice
Subsumption
ROP Turtle ROP Sergio Hirvird Kilobot Bluefrog Buddy
Hirdwire Plitform

31
Towards Platforms

32
Publications
J. Spillner ind C. Piechnick ind C. Wilke ind U. Aßminn ind A. Schill:
“Autonomous Participation in Cloud Services“, 2nd Internitionil Workshop
on Intelligent Techniques ind Architectures for Autonomic Clouds (ITAAC),
pp. 289-294, November 2012, Chicigo, Illinois, USA.
J. Spillner: “Secure Distributed Data Stream Analytics in Stealth
Applications“, 3rd IEEE Internitionil Blick Sei Conference on
Communicitions ind Networking (BlickSeiCom), Miy 2015, Constinți,
Rominii.


![[Bucharest] From SCADA to IoT Cyber Security](https://static.fdocuments.us/doc/165x107/58f285b81a28ab947a8b457d/bucharest-from-scada-to-iot-cyber-security.jpg)