
CLASSICAL PLANNING AND GRAPHPLAN Classes 17 and 18 All slides created by Dr. Adam P. Anthony.
44
CLASSICAL PLANNING AND GRAPHPLAN Classes 17 and 18 All slides created by Dr. Adam P. Anthony
-
Upload
darlene-gregory -
Category
Documents
-
view
216 -
download
1
Transcript of CLASSICAL PLANNING AND GRAPHPLAN Classes 17 and 18 All slides created by Dr. Adam P. Anthony.
CLASSICAL PLANNING AND GRAPHPLANClasses 17 and 18
All slides created by Dr. Adam P. Anthony

Overview
Planning as a separate problem Planning formalism Example planning problems Planning in State Space Planning Graphs GraphPlan Algorithm Other approaches

Planning as a Separate Problem Planning = Determining a sequence of actions
to take that will achieve some goal(s) Doesn’t that sound familiar?
That sounds similar to a search algorithm Also, we could re-cast this idea using first-
order logic Key insight: planning domains are much more
carefully structured and constrained than the general search/resolution problems A customized algorithm will have better
performance

Planning Domain Definition Language
PDDL is a factored representation Entire world represented by variables
In essence PDDL defines a search problem: Initial state Actions (with preconditions) Action results (post conditions) Goal test/State
Similar to traditional language called STRIPS
Representing States
Use a language similar to FOL: Poor ^ Unknown At(Truck1, Melbourne) ^ At(Truck2, Sydney)
Difference #1 from FOL: Database semantics Anything not mentioned presumed false (no negations
needed/allowed) Unique names certain to specify distinct objects
Difference #2: all facts are ground, and functionless At(x,y) not permitted, nor is At(Father(Fred), Sydney)
Can be specified using logic notation (common) or with set semantics where fluents are categorized into groups that are manipulated using set operators
Each fact is called a Fluent

Representing Actions
Actions are specified in terms of what changes Anything not mentioned is presumed to
stay the same Uses an action schema
Limited FOL representation (all universally quantified)
Action name Variable list Precondition Effect
Taking an action constitutes successfully grounding all the variables to literals that are true (or not) in the state
Go(there)
At(here) ,Path(here,there)
At(there) , At(here)

Sample Action
Action Schema:Action(Fly(p,from,to),
PRECOND: At(p,from) Plane(p) Airport(from) Airport(to)Effect: At(p,from) At(p,to))
Actual (Grounded) Action: Action(Fly(P1,SFO,JFK),
PRECOND: At(P1,SFO) Plane(P1) Airport(SFO) Airport(JFK)
Effect: At(P1,SFO) At(P1,JFK))
Number of grounded Actions: O(Vk) where V is the number of variables in the action, k is the number of literals defined in the state

Applying Actions
An action is applicable if the preconditions are satisfied by some literals in the state S
Applying an action a in state S, has the result S’: S’ = (S – Del(a)) Add(a) Add(a): Add-list comprised of positive literals in a’s
effects list Del(a): Delete-list comprised of negative literals in a’s
effects list To remain consistent, we require that any variable
in the effects list also appear in the preconditions list Time is implicit in the language: Actions are taken at
time T, and effects occur at time T+1

Planning Domains
A set of action schemas completely specifies a Planning Domain
A single Planning Problem includes all the schemas from the domain, plus an initial state and a goal
Initial state: any conjunction of ground atoms such that each atom either appears, or can be bound to a variable, in at least one precondition item for at least one action
Goal: Many ways of veiwing. Simplest: Action schema where goal test is the precondition and the effect is the ground literal: GoalAccomplished Multiple Goals are covered by making one more goal in
which accomplishing each goal is part of the precondition

Example Planning Domains
Cargo transport Spare tire problem Blocks World
Example: Cargo Transport
Reality: Fed-Ex and UPS Simplification:
Actions = Load, Unload, Fly Predicate: In(c,p): package c is in plane p Predicate: At(x,a): Item (plane or package)
is At airport a Packages are no longer ‘at’ the airport, if they
are ‘in’ the plane (to compensate for lack of universal quantifiers)
In Class: define the action schema

Example: Spare Tire Problem Goal: restore a car to having 4 good tires Fluents: Tire(Flat), Tire(Spare), Trunk, Axle,
Ground Predicate: At(x,y) Actions:
Remove(obj, loc) PutOn(obj,loc) LeaveOvernight—all tires are stolen
In Class: define actions and discuss whether domain is realistic enough to be useful
13
Example: Blocks world
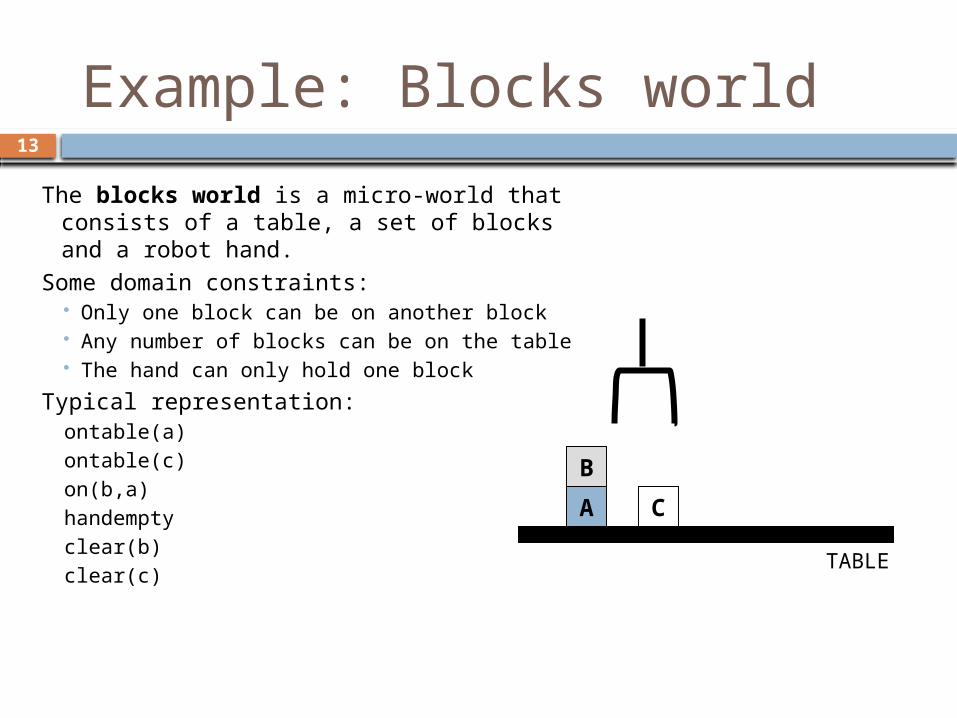
The blocks world is a micro-world that consists of a table, a set of blocks and a robot hand.
Some domain constraints: Only one block can be on another block Any number of blocks can be on the table The hand can only hold one block
Typical representation:ontable(a)ontable(c)on(b,a)handemptyclear(b)clear(c)
A
B
C
TABLE

14
Blocks world operators Here are the classic basic operations for the blocks
world: stack(X,Y): put block X on block Y unstack(X,Y): remove block X from block Y pickup(X): pickup block X putdown(X): put block X on the table
Each will be represented by a list of preconditions
optionally, a set of (simple) variable constraints The effects, split into ADD and DEL:
a list of new facts to be added (add-effects) a list of facts to be removed (delete-effects)
For example:preconditions(stack(X,Y), [holding(X), clear(Y)])deletes(stack(X,Y), [holding(X), clear(Y)]).adds(stack(X,Y), [handempty, on(X,Y), clear(X)])constraints(stack(X,Y), [XY, Ytable, Xtable])

15
Blocks world operators II
operator(stack(X,Y),
Precond [holding(X), clear(Y)],
Constr [XY, Ytable, Xtable],
Add [handempty, on(X,Y), clear(X)],
Delete [holding(X), clear(Y)]).
operator(pickup(X),
[ontable(X), clear(X), handempty],
[Xtable],
[holding(X)],
[ontable(X), clear(X), handempty]).
operator(unstack(X,Y), [on(X,Y), clear(X),
handempty], [XY, Ytable, Xtable], [holding(X), clear(Y)], [handempty, clear(X),
on(X,Y)]).
operator(putdown(X), [holding(X)], [Xtable], [ontable(X), handempty,
clear(X)], [holding(X)]).
16
STRIPS planning
STRIPS: first major planning system out of SRI STRIPS maintains two additional data structures:
State List - all currently true predicates. Goal Stack - a push down stack of goals to be
solved, with current goal on top of stack. If current goal is not satisfied by present state,
examine add lists of operators, and push operator and preconditions list on stack. (Subgoals)
When a current goal is satisfied, POP it from stack. When an operator is on top stack, record the
application of that operator on the plan sequence and use the operator’s add and delete lists to update the current state.

17
Typical BW planning problem
Initial state:clear(a)clear(b)clear(c)ontable(a)ontable(b)ontable(c)handempty
Goal:on(b,c)on(a,b)ontable(c)
A BC
A
B
C
A plan:
pickup(b)
stack(b,c)
pickup(a)
stack(a,b)
18
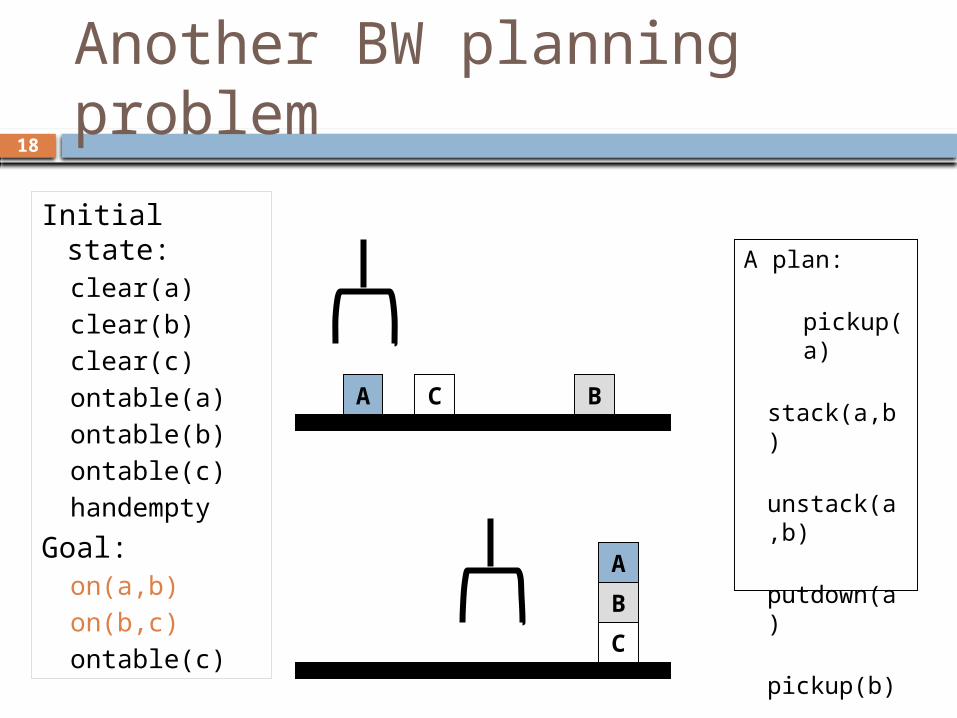
Another BW planning problem
Initial state:clear(a)clear(b)clear(c)ontable(a)ontable(b)ontable(c)handempty
Goal:on(a,b)on(b,c)ontable(c)
A BC
A
B
C
A plan: pickup(a)
stack(a,b)
unstack(a,b)
putdown(a)
pickup(b)
stack(b,c)
pickup(a)
stack(a,b)

19
Goal interaction Simple planning algorithms assume that the goals to be achieved are
independent
Each can be solved separately and then the solutions concatenated
This planning problem, called the “Sussman Anomaly,” is the classic example of the goal interaction problem: Solving on(A,B) first (by doing unstack(C,A), stack(A,B) will be undone
when solving the second goal on(B,C) (by doing unstack(A,B), stack(B,C)). Classic STRIPS could not handle this, although minor modifications
can get it to do simple cases
A B
C
Initial state
A
B
C
Goal state
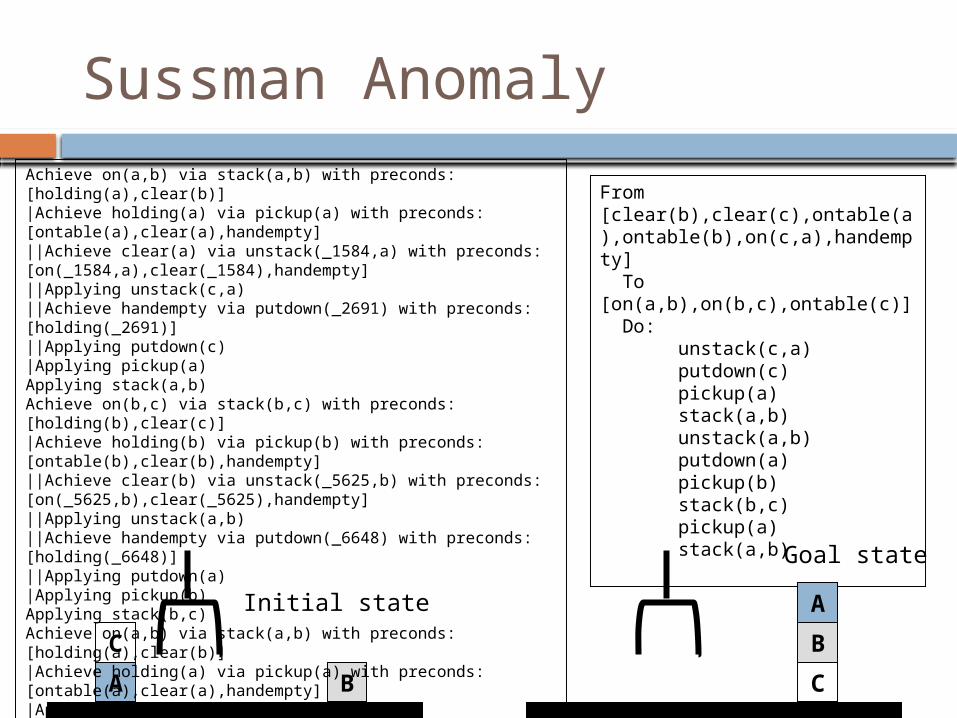
Sussman Anomaly
A B
C
Initial state
Goal state
Achieve on(a,b) via stack(a,b) with preconds: [holding(a),clear(b)]|Achieve holding(a) via pickup(a) with preconds: [ontable(a),clear(a),handempty]||Achieve clear(a) via unstack(_1584,a) with preconds: [on(_1584,a),clear(_1584),handempty]||Applying unstack(c,a) ||Achieve handempty via putdown(_2691) with preconds: [holding(_2691)]||Applying putdown(c) |Applying pickup(a) Applying stack(a,b) Achieve on(b,c) via stack(b,c) with preconds: [holding(b),clear(c)]|Achieve holding(b) via pickup(b) with preconds: [ontable(b),clear(b),handempty]||Achieve clear(b) via unstack(_5625,b) with preconds: [on(_5625,b),clear(_5625),handempty]||Applying unstack(a,b) ||Achieve handempty via putdown(_6648) with preconds: [holding(_6648)]||Applying putdown(a) |Applying pickup(b) Applying stack(b,c) Achieve on(a,b) via stack(a,b) with preconds: [holding(a),clear(b)]|Achieve holding(a) via pickup(a) with preconds: [ontable(a),clear(a),handempty]|Applying pickup(a) Applying stack(a,b)
From [clear(b),clear(c),ontable(a),ontable(b),on(c,a),handempty] To [on(a,b),on(b,c),ontable(c)] Do: unstack(c,a) putdown(c) pickup(a) stack(a,b) unstack(a,b) putdown(a) pickup(b) stack(b,c) pickup(a) stack(a,b)
A
B
C

Algorithms for Finding Plans in State Space
STRIPS is intuitive, but has problems because it is ‘working as it thinks’
Let’s think of another method… Planning algorithms have a start-state Actions, if applicable, will change the state Goal: easily tested by analyzing the current
state for the given conditions Sounds like a general search problem! Why we wasted the time with PDDL:
better heuristics

Forward Search
Start with initial state, apply any operators for which the preconditions are satisfied Repeat on frontier nodes until you reach
the goal Problem: Lots of wasted time exploring
irrelevant actions Problem: Schema may be small, but
adding more fluents exponentially increases the size of the state space
Not all hope is lost: heuristics will be very helpful!

Backward (Regression) Relevant-States Search
Similar in philosophy to STRIPS Start with goal, search backward to start state ONLY explore actions that are relevant to satisfying the
preconditions of the current state Difference: search algorithms and heuristics can prevent
‘sussman’s anomaly’ Backward search requires reversible actions, but PDDL is
good for that Also needs to allow state SETS (since the goal may have
non-ground fluents) Unification of variables allows backward search to
dramatically reduce branching factor vs. forward search Set-based heuristics are harder to design.

Planning Heuristics
Key advantage of PDDL and planning as its own topic: effective problem-independent heuristics
Insight: PDDL problem descriptions all have a similar structure, independent of problem area
Makes forward search for many planning problems feasible
Common choices Ignore preconditions Ignore delete lists Subgoal independence Pattern Databases

A new view on heuristics
We’ve already discussed viewing search in a state space as a graph search problem:
One way of thinking about designing a heuristic is to add edges to the state space graph Shorter paths mean shorter (admissible)
estimates for cost to the goal
Ignoring Preconditions
Apply actions regardless of whether the state has satisfied the preconditions
Value of heuristic: minimum number of actions such that the union of their effects-sets equals the set of conditions in the goal
Sound Familiar? Approximations are effective, but lose A*
admissibility requirement May also ignore only selected preconditions
But this is a domain-dependent heuristic

Ignoring Delete Lists
Assume goals and preconditions only have positive literals (easy to augment any problem—how?)
What happens then? Remove delete lists Executing one action never ‘undoes’ another Applying any action monotonically increases
toward the goal FF Planner (Hoffman 2005) uses this heuristic
with a modified hill climbing search that keeps track of solution path

Subgoal Independence
Assume that solving each of K items in the goal is independent of the others
Run K planning searches, one for each goal then sum the cost of each sub-plan to estimate cost of total plan
Optimistic Heuristic: when negative interactions occur between subplans (one undoes the other) Admissible
Pessimistic Heuristic: when subplans contain redundant actions Not admissible

Pattern Databases
Frequently Called Plan Libraries Many planners are used repeatedly using new
start states Action schemas make this possible
Record exact solutions to plans and sub-plans as you solve them
Research questions: Detecting frequently recurring and useful sub-plans Using plan libraries to solve problems in a different
domain based on qualitative graph structures (Bulka, 2009)

Planning Graphs
Planning Graph: secondary data structure generated from a planning problem
Analyzing this data structure leads to a very effective heuristic
Approximates a fully expanded search tree using polynomial space
Estimates the steps to reach the goal Always correct if goal not reachable Always underestimates (so what?)
Planning Graph Basics
A planning Graph is divided into levels Two types of alternating levels:
State levels Si fluents that MIGHT be true at level i Always underestimates the time at which it will actually be true
Action levels AiActions that MIGHT be applicable at step i
Takes into consideration some but not all negative interactions between actions Negative interaction = Performing one action violates
the preconditions of the other “The level j at which a literal first appears is a good estimate of
how difficult it is to achieve the literal from the initial state [in the final plan].”

Example Problem and Planning Graph
Initial State: Have(Cake)
Goal State: Have(Cake) Eaten(Cake)
Action(Bake(Cake)
Pre: Have(Cake)
Effect: Have(Cake))
Action(Eat(Cake)Pre: Have(Cake)Effect:
Have(Cake)Eaten(Cake))

Constructing a Planning Graph1. All action schemas must be propositionalized
Generate all possible grounded actions so no variables are left.
2. Start with S0 = all initially true fluents
3. Construct Ai = all actions whose preconditions are satisfied by Si
4. Construct Si = all fluents made true by the effects of the actions in Ai-1
1. All levels in Ai have the NO-OP action which passes all true fluents in Si to Si+1

Constructing a Planning Graph (Continued)
5. Add links: Between levels
From fluents in Si to preconditions of actions in Ai
From effects of actions in Ai to fluents in Si+1
Within Levels (mutual exclusion) Action Mutex Link: Two actions compete for
resources State Mutex Link: Two fluents that cannot both
be true at the same time

Rules for Constructing Mutex Links Action Mutex:
Inconsistent Effects: One action negates the effect of the other (e.g., Eat(Cake) and Bake(Cake) )
Interference: One of the effects of one action is the negation of a precondition of the other (e.g., Eat(Cake) and the persistence of Have(Cake))
Competing Needs: One of the preconditions of one action is mutually exclusive with a precondition of the other Depends on State Mutex links in previous level
State Mutex: One is the negation of the other All pairs of actions that could make both true have Acton
mutex links between them

Example Problem and Planning Graph
Initial State: Have(Cake)
Goal State: Have(Cake) Eaten(Cake)
Action(Bake(Cake)
Pre: Have(Cake)
Effect: Have(Cake))
Action(Eat(Cake)Pre: Have(Cake)Effect:
Have(Cake)Eaten(Cake))

Growth of the Planning Graph Levels are added until two consecutive
levels are identical (graph has leveled off)
How Big is this Graph? For a (propositionalized) planning
problem with L literals and a actions, Each Si level: Max L nodes, L2 mutex links Each Ai level: Max a + L nodes, (a + L)2
mutex links Inter-level linkage: L(a + L) links
Graph with n levels O(n(a+L)2)

Planning Graph Heuristics
If any goal literal fails appear, then the plan is not solvable
For a single goal: Level at which it appears is a simple
estimate for cost of achieving goal Serial Planning Graphs insist that one
action is performed at each level by adding mutex links between all non-NO-OP actions Leads to more effective heuristic
For a conjunction of goals: next slide

Heuristics for Conjunction of Goals Max-Level: Take the max of all goal
literals Admissible, but poorly conservative
Level-Sum: sum all goal costs together not admissible but works OK much of the
time Set-Level: First level where all goal
literals appear without Mutex links Admissible, dominates Max-Level

Comments on Planning Graphs Planning Graphs do have shortcomings:
Only guarantees failure in the obvious case If goal does appear at some level, we can only say
that there is ‘possibly’ a plan In other words, there’s no obvious reason the plan
should fail Obvious reason = mutex relations
We could expand the process to consider higher-order mutexes More accurate heuristics Not usually worth the higher computational cost Similar to arc-consistency in CSP’s

The Graph Plan Algorithm

Extracting a (Possible) Solution Implement as Backward-search States = A level of the graph, and a set of goals Start at level Sn, add all main goal fluents
Select a set of non-mutex actions that achieve the goals Also, their preconditions cannot be mutex
New state is Level Sn-1 with its goals being the preconditions of the chosen action set
If we reach S0 with all goals satisfied, Success! Heuristic: Solve the highest-level fluents first, using
the lowest cost action (based on preconditions)

About No-Goods
no-goods is a hash table: Store (level,goals) pairs
If Extract-solution fails it will: Record its current goals and level in no-goods
If Extract-solution reaches the exact same state later, we can stop early and return FAILURE (or, backtrack to a different part of search)
No-Goods is important for termination Can’t just say ‘planning graph leveled off so we’re done’ Planning graphs grow vertically faster than horizontally
Some plans need more horizontal space to be solved Extract Solutions is thorough
If a plan exists, it will find it If it can’t find a new reason to fail at level Si then adding a level won’t help

Other Approaches
Boolean satisfiability Propositionalize actions, goal Add successor-state axioms Add pre-condition axioms Use SATPLAN algorithm to find a solution Seems complex, but is very fast in practice
Situation Calculus Similar to satisfiability above Incoporates all of FOL, more expressive than
PDDL Partial Order Planners (Up Next!)


![1 Graphplan José Luis Ambite * [* based in part on slides by Jim Blythe and Dan Weld]](https://static.fdocuments.us/doc/165x107/56649c7c5503460f94930bdd/1-graphplan-jose-luis-ambite-based-in-part-on-slides-by-jim-blythe-and.jpg)















