
CINETIQUE DYNAMIQUE - psistarcanard.free.frpsistarcanard.free.fr/poly/2/Cinetique_Dynamique.pdf ·...
32
CINETIQUE - DYNAMIQUE
Transcript of CINETIQUE DYNAMIQUE - psistarcanard.free.frpsistarcanard.free.fr/poly/2/Cinetique_Dynamique.pdf ·...
CINETIQUE - DYNAMIQUE
2 ETUDE DANS UN REPERE NON GALILEEN
I. MASSE - CENTRE D’INERTIE 3 1. Conservation de la masse ................................................................................................................ 3 2. Point matériel ................................................................................................................................... 3 3. Système fini de point matériels ........................................................................................................ 3 4. Cas d’une courbe matérielle ............................................................................................................ 3 5. Cas d’une surface matérielle ............................................................................................................ 4 6. Cas d’un domaine tridimensionnel matériel ..................................................................................... 4 7. Système de solides .......................................................................................................................... 5 8. Symétrie matérielle .......................................................................................................................... 5 9. Théorèmes de GULDIN ................................................................................................................... 5
II. PRINCIPE FONDAMENTAL 7 1. Principe de l’inertie ........................................................................................................................... 7 2. Quantité de mouvement ................................................................................................................... 7 3. Quantité d’accélération .................................................................................................................... 8 4. P.F.D. pour un point matériel ........................................................................................................... 9 5. P.F.D. pour un système matériel ...................................................................................................... 9
III. THEOREMES GENERAUX 10 1. Théorème de la résultante dynamique ..........................................................................................10 2. Théorème du moment dynamique .................................................................................................10 3. Théorème des actions mutuelles ...................................................................................................10 4. Forces intérieures ..........................................................................................................................10
IV. TORSEURS CINETIQUE ET DYNAMIQUE 11 1. Résultante cinétique .......................................................................................................................11 2. Moment cinétique ...........................................................................................................................11 3. Résultante dynamique ...................................................................................................................12 4. Moment dynamique ........................................................................................................................12 5. Relation entre moment dynamique et moment cinétique ..............................................................12 6. Projection du moment dynamique sur un axe ................................................................................13
V. OPERATEUR D’INERTIE 14 1. Rappel ............................................................................................................................................14 2. Définition ........................................................................................................................................14 3. Matrice associée dans la base b ....................................................................................................15 4. Théorème de König ........................................................................................................................16 5. Théorème de Huyghens .................................................................................................................16
VI. PUISSANCE 17 1. Point matériel .................................................................................................................................17 2. Système matériel............................................................................................................................17 3. Cas du solide..................................................................................................................................18
VII. ÉNERGIE CINETIQUE 19 1. Point matériel .................................................................................................................................19 2. Système matériel............................................................................................................................19 3. Cas du solide indéformable ............................................................................................................21
VIII. RESUME (CAS DU SOLIDE) 22 1. Moment cinétique ...........................................................................................................................22 2. Moment dynamique ........................................................................................................................22 3. Énergie cinétique ...........................................................................................................................22
IX. APPLICATIONS 23 1. Solide en rotation autour d’un axe fixe ...........................................................................................23 2. Équilibrage .....................................................................................................................................25 3. Solide en rotation autour d’un point fixe .........................................................................................26
X. ETUDE DANS UN REPERE NON GALILEEN 30 1. Problème ........................................................................................................................................30 2. Mise en équation ............................................................................................................................30 3. Exemple du cycliste .......................................................................................................................32

CINETIQUE - DYNAMIQUE 3
I. MASSE - CENTRE D’INERTIE La masse m d’un corps caractérise la quantité de matière de celui-ci. C’est une me-sure additive.
1. Conservation de la masse t1 et t2 étant les dates de deux instants différents, la masse de tout domaine S de l’espace affine euclidien E3 à l’instant t1 est égale à sa masse à l’instant t2.
∀ et , =t t m S t m S t1 2 1 2( , ) ( , )
Théorème Soit une fonction vectorielle f qui à tout point M d’un ensemble matériel S, et à tout instant t, associe le vecteur
f M t( , ) , alors :
∫∫
S
RRS
dmtMfdtd
dmtMfdtd
),(=),(
et ceci, quel que soit le repère R choisi.
2. Point matériel Un point matériel M est un point de l’espace euclidien E affecté d’une masse m.
3. Système fini de point matériels Supposons donné un système matériel S, constitué de n points matériels M1, M2,..., Mn de masses respectives m1, m2, ..., mn. La masse m de ce système matériel est égale à la somme des masses des n points.
∑=
n
iimm
1
=
On appelle centre d’inertie G de ce système matériel S le barycentre des n points Mi affectés des coefficients respectifs mi. Le point A de l’espace affine étant arbitraire-ment choisit, la position du point G est donnée par l’égalité suivante :
∑=
n
iii AMmAGm
1
=
4. Cas d’une courbe matérielle Supposons donné un solide S constitué de points matériels dont les positions, dans l’espace affine euclidien E, E2 ou E3, sont les points d’une courbe paramétrée Γ,
image d’une fonction F continûment dérivable. La connaissance du solide curviligne S implique la connaissance d’une masse li-néique µ(M) définie en chaque point M de la courbe Γ.
4 ETUDE DANS UN REPERE NON GALILEEN
La masse m du solide S est donnée par l’égalité :
m (M) dl= µΓ∫
Le centre d’inertie G du solide S est défini, indépendamment du point A, par l’égalité vectorielle suivante :
dlAMMAGm )(= ∫Γ
µ
5. Cas d’une surface matérielle Supposons donné un solide S constitué de points matériels dont les positions, dans l’espace affine euclidien E2 ou E3, sont les points d’une surface paramétrée Σ, image
d’une fonction F continûment dérivable. La connaissance de la surface solide S implique la connaissance d’une masse surfa-cique µ(M) définie en chaque point M de la surface Σ. La masse m du solide S est donnée par l’égalité :
m M ds= µ( )Σ∫∫
Le centre d’inertie G du solide S est défini, indépendamment du point A, par l’égalité vectorielle suivante :
∫∫Σ
µ dsAMMAGm )(=
6. Cas d’un domaine tridimensionnel matériel Supposons donné un solide S constitué de points matériels dont les positions, dans l’espace affine euclidien E3, sont les points d’un domaine tridimensionnel ∆, image
d’une fonction F continûment dérivable. La connaissance du solide plein S implique la connaissance d’une masse volumique µ(M) définie en chaque point M du domaine tridimensionnel ∆. La masse m du solide S est donnée par l’égalité :
m M dv= µ( )∆∫∫∫
Le centre d’inertie G du solide S est défini, indépendamment du point A, par l’égalité vectorielle suivante :
∫∫∫∆
µ dvAMMAGm )(=

CINETIQUE - DYNAMIQUE 5
7. Système de solides Considérons un système matériel S constitué de n solides Si de centre d’inertie Gi et de masse mi. La masse m du système matériel S est égale à la somme des masses des n solides.
∑=
n
iimm
1
=
Le centre d’inertie G du système matériel est le barycentre des n points Gi affectés des masses mi.
∑=
n
iii AGmAGm
1
=
8. Symétrie matérielle Si un solide possède un élément de symétrie tel qu‘un point O, une droite ∆ ou un plan Π, alors le centre d’inertie G est situé au point O, sur la droite ∆ ou sur le plan Π. Il convient donc de rechercher ces éléments de symétrie avant d’entreprendre tout calcul.
9. Théorèmes de GULDIN
A. 1ER THEOREME Supposons données, dans un plan de l’espace affine euclidien, une courbe paramé-trée Γ et une droite ∆ qui ne se coupent pas. Alors :
L’aire A de la surface de révolution engendrée par la rotation de ΓΓΓΓ autour de ∆∆∆∆ est égale au produit de la longueur L de la courbe ΓΓΓΓ et de la longueur du cercle engendré par la rotation autour de ∆∆∆∆ du centre d’inertie G de la courbe ΓΓΓΓ.
O
G
∆
y
yG
Γ A=2πYG.L
6 ETUDE DANS UN REPERE NON GALILEEN
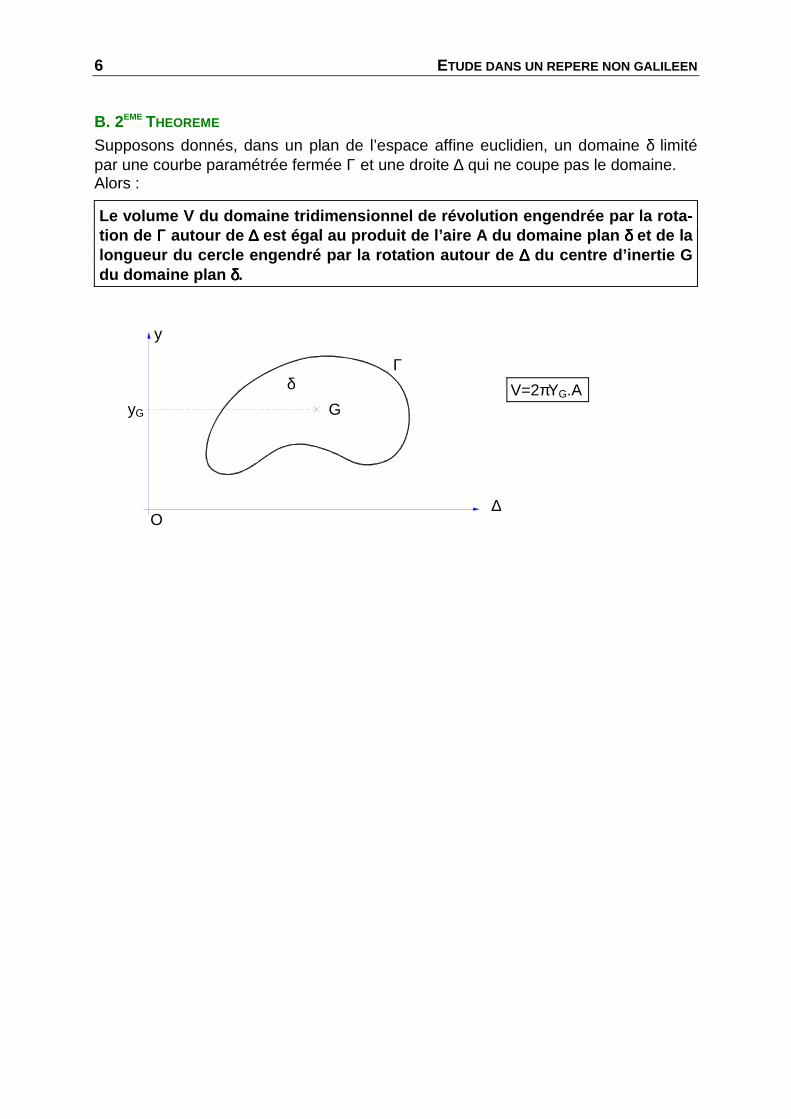
B. 2EME THEOREME Supposons donnés, dans un plan de l’espace affine euclidien, un domaine δ limité par une courbe paramétrée fermée Γ et une droite ∆ qui ne coupe pas le domaine. Alors :
Le volume V du domaine tridimensionnel de révolutio n engendrée par la rota-tion de ΓΓΓΓ autour de ∆∆∆∆ est égal au produit de l’aire A du domaine plan δδδδ et de la longueur du cercle engendré par la rotation autour de ∆∆∆∆ du centre d’inertie G du domaine plan δδδδ.
O
G
∆
y
yG
Γ δ V=2πYG.A

CINETIQUE - DYNAMIQUE 7
II. PRINCIPE FONDAMENTAL
1. Principe de l’inertie
Il existe un repère privilégié dans lequel un point matériel qui serait soustrait à toute influence aurait une accélération nulle. Ce repère est dit galiléen ou absolu.
A. RELATIVITE GALILEENNE On remarque que s’il existe un repère galiléen, alors il en existe une infinité, qui se déduisent du premier par des mouvements d’accélération nulle (mouvement de tran-slation uniforme). Tous ces repères conviennent dont pour exprimer les lois de la mécanique classique. Ainsi, la notion de vitesse d’un point matériel n’a pas de signification absolue, et ne peut être que relative au repère galiléen particulier qui a été choisi. On en tire le prin-cipe de relativité galiléenne suivant :
Aucune expérience mécanique, exprimée dans un repèr e galiléen, ne doit permettre de mettre en évidence le mouvement de ce repère par rapport à un autre repère galiléen.
2. Quantité de mouvement
A. POINT MATERIEL
Soit un point matériel M, de masse m et animé d’une vitesse RMV / par rapport à un
repère R. Le vecteur RMVmP / = définit la quantité de mouvement de ce point maté-riel. Il est considéré comme lié à M et dépend, bien entendu, du repère de mouve-ment R. Pour pouvoir caractériser cette quantité de mouvement en n'importe quel point A de l'espace, on construit le glisseur RM /Σ :
∧=σ≡
≡ΣRMRMA
RM
A
RM
M
RMPAM
PP
//,
//
/0
B. SYSTEME MATERIEL À chaque particule élémentaire M de masse dm du système matériel S est associée :
la quantité de mouvement : RSMRM dmdP // V ∈=
le glisseur :
∧=σ≡
≡ΣRMRMA
RM
A
RM
M
RMdPAMd
dPdPd
//,
//
/0
8 ETUDE DANS UN REPERE NON GALILEEN
On obtient alors le torseur des quantités de mouvement de S par rapport au repère R appelé torseur cinétique et dont les éléments de réduction, exprimés en un point quelconque A, sont les suivants :
cinétique moment
cinétique résultante
//,
//
/
→
→
∧=σ
=≡Σ
∫
∫
∈SM
RMRSA
S
RMRS
A
RSdPAM
dPP
Si on considère une partition de S :
( ∅=∩+= 2121 et SSSSS ) on a bien évidemment :
RSRSRSSRS ///)(/ 2121Σ+Σ=Σ=Σ +
3. Quantité d’accélération
A. POINT MATERIEL Soit un point matériel M, de masse m et animé d’une accélération /M Ra
par rapport à
un repère R. Le vecteur / M RD m a=
définit la quantité d’accélération de ce point maté-riel. Il est considéré comme lié à M et dépend, bien entendu, du repère de mouve-ment R. Pour pouvoir caractériser cette quantité d'accélération en n'importe quel point A de l'espace, on construit le glisseur RM /∆ :
∧=δ≡
≡∆RMRMA
RM
A
RM
M
RMDAM
DD
//,
//
/0
B. SYSTEME MATERIEL A chaque particule élémentaire M de masse dm du système matériel S, est associée une quantité d’accélération élémentaire / / M R M S RdD dm a ∈=
.
On obtient alors le torseur des quantités d'accélération de S par rapport au repère R appelé torseur dynamique et dont les éléments de réduction, exprimés en un point quelconque A, sont les suivants :
dynamique moment
dynamique résultante
//,
//
/
→
→
∧=δ
=≡∆
∫
∫
∈SM
RMRSA
S
RMRS
A
RSdDAM
dDD
Si on considère une partition de S :
( ∅=∩+= 2121 et SSSSS ) on a bien évidemment :
RSRSRSSRS ///)(/ 2121∆+∆=∆=∆ +
CINETIQUE - DYNAMIQUE 9
4. P.F.D. pour un point matériel Considérons un point matériel M de masse m en mouvement par rapport à un repère galiléen Rg. L'action mécanique qu'il subit se représente par un glisseur de résul-
tante F et de moment nul en M. Le principe fondamental de la dynamique appliqué sur ce point s’écrit :
/ gM RF m a=
La quantité / gM Rm a
est appelée quantité d’accélération galiléenne du point M.
5. P.F.D. pour un système matériel Considérons un système matériel S en mouvement par rapport à un repère galiléen Rg soumis à une action mécanique extérieure
gRS /M :
≡SSA
SS
A
RSM
Rg
/,
/
/M
Alors, le principe fondamental de la dynamique appliqué à ce système s’écrit :
// gS RS S = ∆M
et s’énonce :
Il existe un repère galiléen et une chronologie gal iléenne tels que le torseur des forces extérieures appliquées sur un système ma tériel est égal au torseur des accélérations galiléennes de ce système.
10 ETUDE DANS UN REPERE NON GALILEEN
III. THEOREMES GENERAUX L’égalité du torseur des forces extérieures et du torseur de quantités d’accélérations galiléennes nous donne deux égalités vectorielles qui sont généralement appelées théorème de la résultante dynamique et théorème du moment dynamique.
1. Théorème de la résultante dynamique Il s’exprime par l’égalité : / /=
gS S G S RR m a ∈
2. Théorème du moment dynamique
Il s’exprime par l’égalité : gRSASSAM /,/, δ=
3. Théorème des actions mutuelles Considérons un système matériel S en mouvement par rapport à un repère galiléen Rg et une partition de S en deux sous systèmes S1 et S2.
On a, bien évidemment : 21 SSS += et ∅=21 SS ∩
Appliquons le principe fondamental de la dynamique à ces trois systèmes matériels :
gRSSS //
∆=M gRSSS // 111
∆=M gRSSS // 222
∆=M
En remarquant que : 11211 /// SSSSSS
MMM +=
et 22122 /// SSSSSS
MMM +=
on peut écrire :
gRSSSSS /// 1112
∆=+MM et gRSSSSS /// 2221
∆=+MM
Ajoutons membres à membres ces deux égalités :
gg RSRSSSSSSSSS ////// 21221112∆+∆=+++ MMMM
Or :
ggg RSRSRS /// 21∆=∆+∆ et
SSSSSS /// 21MMM =+
D’où :
gRSSSSSSS //// 2112∆=++ MMM
Et finalement : 0
2112 // =+ SSSS MM
4. Forces intérieures Les forces intérieures d’un système matériel S sont des actions gravitationnelles, électromagnétiques ou de contact (ou de liaison) entre éléments de ce système. Prises deux à deux, ces forces s’annulent (ceci découle du principe des actions mu-tuelles que nous venons d’établir à partir du principe fondamental de la dynamique). Le torseur des forces intérieures d’un système matériel est donc équivalent à zéro :
0int/ ≡SM
CINETIQUE - DYNAMIQUE 11
IV. TORSEURS CINETIQUE ET DYNA-MIQUE
1. Résultante cinétique G étant le centre d’inertie d’un système matériel S, on peut écrire :
∫∈
=SM
dmOMOGm
En dérivant par rapport au temps cette égalité, on obtient :
∫∫∫∈
∈
∈∈
∈ =
=
SM
S/RM
SM RRSM
S/RG dmVdmOMdtd
dmOMdtd
Vm =
c’est à dire : S/RG
SM
S/RMS/R VmdmVP ∈
∈
∈ == ∫ (1)
La quantité de mouvement d’un système matériel est égale à celle de son centre d’inertie où serait concentrée toute la mass e.
2. Moment cinétique
A. CAS GENERAL Le seul outil dont on dispose dans le cas d'un système matériel quelconque est la relation de changement de point qui s'écrit :
RSGRB,SRA,S VABm /// ∈∧+σ=σ
B. CAS DU SOLIDE INDEFORMABLE
Exprimons le vecteur RA,S /σ : ∫∈
∈∧=σSM
RSMRA,S dmVAM //
Le système matériel S étant indéformable, on peut remplacer RSMV /∈ par
AMV RSRSA ∧Ω+∈ // dans l’égalité précédente :
( )∫∫∈∈
∈ ∧Ω∧+∧=σSM
RS
SM
RSARSA dmAMAMdmVAM ///,
En remarquant que la quantité RSAV /∈ est indépendante de l’intégration, on peut écrire :
( )∫∫∈
∈
∈
Ω∧∧−∧
=σ
SM
RSRSA
SM
RSA dmAMAMVdmAM ///,
Finalement, on obtient :
( )∫∈
∈ Ω∧∧−∧=σSM
RSRSARSA dmAMAMVAGm ///,
12 ETUDE DANS UN REPERE NON GALILEEN
L’expression se simplifie si on calcule le torseur cinétique : au centre de masse du solide ; en un point fixe (s’il en existe un). Remarque : Dans cette relation, la vitesse qui intervient est celle du point A apparte-nant au solide S.
C. TORSEUR CINETIQUE Le torseur cinétique d’un solide S dans son mouvement par rapport au repère R s’écrit, en un point quelconque A :
( )
Ω∧∧−∧=σ
=≡Σ
∫∈
∈
∈
SM
RSRSARSA
RSGRS
A
RS dmAMAMVAGm
VmP
///,
//
/
3. Résultante dynamique En dérivant la relation (1), on obtient :
∫∫∈
∈
∈
∈∈
=
=
SM R
S/RM
RSM
S/RMS/RG dmVdtd
dmVdtd
Am
C’est à dire : / S R G S/R M S/R
M S
D m a a dm∈ ∈∈
= = ∫
La quantité d’accélération d’un système matériel S est égale à celle de son centre d’inertie où serait concentrée toute la mass e.
4. Moment dynamique
A. CAS GENERAL Le seul outil dont on dispose dans le cas d'un système matériel quelconque est la relation de changement de point qui s'écrit :
/ / /A,S R B,S R G S Rm AB a ∈δ = δ + ∧
B. CAS DU SOLIDE INDEFORMABLE Le champ des accélérations d'un solide indéformable n'est pas équiprojectif. Les techniques utilisées pour le calcul du moment cinétique ne sont donc pas applicables ici. Le cas particulier du solide indéformable ne présente pas d'intérêt particulier pour le calcul du moment dynamique.
5. Relation entre moment dynamique et moment cinéti que Exprimons le moment dynamique :
// / M S RA,S R M S RM S M S
dAM a dm AM V dm
dt∈∈
∈ ∈
δ = ∧ = ∧∫ ∫

CINETIQUE - DYNAMIQUE 13
( ) ∫∫∈
∈
∈
∈ ∧
−
∧=δSM
RSM
RSM R
RSMRA,S dmVAMdtd
dmVAMdtd
///
Le point A où est exprimé le moment dynamique peut être mobile par rapport au re-père d'observation R. Il faut donc écrire :
( )∫∫∈
∈
∈
∈ ∧
−+
∧=δ
SM
RSM
RRSM
RSMRA,S dmVOMOAdtd
dmVAMdtd
///
( ) ∫∫∈
∈∈
∈
∈ ∧−∧+
σ=δSM
RSMRSM
SM
RSMRA
RRSARA,S dmVVdmVV
dtd
0=
/////,/
En remarquant que la quantité RAV / est indépendante de l’intégration, on peut
écrire : RSGRA
SM
RSMRA
SM
RSMRA VVmdmVVdmVV ////// ∈
∈
∈
∈
∈ ∧=∧=∧ ∫∫
Finalement, on a : ( ) RSGRA
RRSARA,S VVm
dtd
///,/ ∈∧+
σ=δ
Cette relation est utilisée de manière intensive pour calculer les moments dyna-miques ; elle est d’un très grand intérêt dans la mesure où elle évite d’exprimer les accélération, dont le calcul est toujours très pénible. Elle est particulièrement facile à mettre en œuvre si : le point A est fixe dans le repère d’observation ; le moment dynamique est calculé au centre de masse G ; les vitesses des points A et G sont colinéaires. Remarque : Dans cette relation générale, la vitesse qui intervient est celle du point A choisi pour exprimer le moment dynamique de l’ensemble matériel quelconque (qui n’est pas forcément un solide indéformable).
6. Projection du moment dynamique sur un axe Il arrive fréquemment dans les problèmes de mécanique que l’on ait pas besoin de l’expression complète du moment dynamique, mais seulement de sa projection
uRA,S
⋅δ / sur un axe ( )uA
, . Ce qui donne :
( ) ( )uVVmudtd
u RSGRA
RRA,SRA,S
,, //// ∈+⋅
σ=⋅δ
Or : ( ) ( )R
RA,SR
RA,SR
RA,S dtud
udtd
udtd
⋅σ−
⋅σ=⋅
σ
///
Donc : ( ) ( )uVVmdtud
udtd
u RSGRA
RRA,S
RRA,SRA,S
,, ///// ∈+
⋅σ−
⋅σ=⋅δ
Malgré son apparente complexité, cette expression présente l’énorme avantage de ne pas faire intervenir d’accélérations ! De plus, on s’arrange en général pour ne pas avoir à calculer tous les termes : en prenant A en G ; en prenant un point A de vitesse nulle ; en projetant sur un axe fixe.

14 ETUDE DANS UN REPERE NON GALILEEN
V. OPERATEUR D’INERTIE Par deux fois, dans le cas d’un solide indéformable, nous avons rencontré
l’expression : ( )∫∈
Ω∧∧−SM
S/R dmAMAM
Nous allons maintenant l’évaluer.
1. Rappel Considérons l’application antisymétrique L
AM. Nous savons que cette application est
linéaire et que, dans E :
( ) uAMuuAM
AM
∧=→ LL
Le vecteur AM étant exprimé sur la base ( )zyxb
,,= , à savoir :
zzyyxxAM
++=
l’application LAM
peut être représentée par la matrice 3x3 suivante :
bxy
xz
yz
L
−−
−=
0
0
0
2. Définition
L'opérateur SA,
≈
J qui à tout vecteur u de E fait correspondre la quantité :
( ) ( ) ( )( ) ( )∫∫∫∈∈∈
≈
−=−=∧∧−=SMSMSM
A,SdmudmudmuAMAMu
AMAMAM
2 LLLJ
est appelé "opérateur d'inertie du solide S au point A".
SA,
≈
J est linéaire par linéarité du produit vectoriel.
SA,
≈
J est symétrique.
En effet : u
∀ et E∈v
( ) ( )( )∫∫∈∈
⋅=⋅SMSM
dmvudmvuAMAMAM
2
LLL
( ) ( ) ( )∫∫∈∈
⋅−=⋅SMSM
dmuvdmvuAMAMAM
2
LLL
( ) ( )( )∫∫∈∈
⋅=⋅SMSM
dmuvdmvuAMAMAM
2
LLL
( ) ( )∫∫∈∈
⋅=⋅SMSM
dmuvdmvuAMAM
22 LL
Alors : ( ) ( )uvvuvuSASA
,,
: E,≈≈
⋅=⋅∈∀ JJ
CINETIQUE - DYNAMIQUE 15
3. Matrice associée dans la base b
L’application LAM
2 est linéaire et sa matrice associée est LxL.
Or : ( )
( )( )
bbbyxyzxz
yzzxxy
xzxyzy
xy
xz
yz
xy
xz
yz
LL
+−+−
+−=
−−
−×
−−
−=×
22
22
22
0
0
0
0
0
0
Par conséquent :
( )( )
( ) bAbA
SA
CDE
DBF
EFA
dmyxdmydmx
dmydmzxdmx
dmxdmxdmzy
=
=
∫∫∫∫∫∫∫∫∫≈
--
--
--
+ z- z-
z- + y-
z- y- +
22
22
22
,J
La quantité :
• ( )∫ += dmzyA 22 est appelée moment d’inertie de S par rapport à l’axe ( )A x,
, est
notée ( ) SxAI ,, et vaut ( ) ( )xxI
SASxA
,,,
≈
⋅= J
De même :
• ( )∫ += dmzxB 22 est appelée moment d’inertie de S par rapport à l’axe ( )A y,
,
• ( )∫ += dmyxC 22 est appelée moment d’inertie de S par rapport à l’axe ( )A z,
,
• ∫= dmyD z est appelée produit d’inertie de S par rapport au plan ( )A y z, ,
,
• ∫= dmxE z est appelée produit d’inertie de S par rapport au plan ( )A x z, ,
,
• ∫= dmxF y est appelée produit d’inertie de S par rapport au plan ( )A x y, ,
.
De plus : ( ) AIdmdmzyxCBA 2 2 2 2222 =ρ=++=++ ∫∫
IA est appelé moment d’inertie polaire de S par rapport au point A. Il est indépendant de la base b choisie pour exprimer la matrice. Remarques :
L’application LAM
2 étant symétrique, sa matrice associée est diagonalisable. Il existe
alors une base de vecteurs propres appelée base principale d’inertie dans laquelle le tenseur d’inertie est diagonal. On parle dans ce cas de tenseur principal d’inertie . Si le tenseur d’inertie est déterminé par rapport au centre d’inertie du solide, on parle de tenseur central d’inertie (qui n’est pas forcément diagonal). Dans la base principale d’inertie et au centre d’inertie le tenseur est central princi-pal d’inertie .

16 ETUDE DANS UN REPERE NON GALILEEN
4. Théorème de König Le théorème de König donne une relation entre le tenseur d’inertie en G et en un point quelconque A. Remarque préliminaire : Si
u est indépendant de l’intégration, alors
( ) 0
=∧
= ∫∫
∈∈
udmGMdmuSMSM
GML
Supposons connu SG,
≈
J et cherchons à l’exprimer en A.
( ) ( ) ( )( ) ( ) ( )( )dmuudmudmuuSMSMSM
SA GMAGAMAMAMAM +
2
, ∫∫∫∈∈∈
≈
−=−=−=
LLLLLLJ
( ) ( )( ) ( )( ) ( )( ) ( )( )dmudmudmudmuuSMSMSMSM
SA GMGMGMAGAGGMAGAG
0
, ∫∫∫∫∈∈∈∈
≈
−−−−=
LLLLLLLLJ
( ) ( )( )
( ) ( )
( ) ( )( )udmudmuuSG
SM
u
SMSA GMAG
mGA
AGAG
,
0
,
,
≈
∈∈
≈
+
−−= ∫∫
≈
JLLLLJ
J
Finalement : ( ) ( ) ( )( )uuumGASGSA
,,,
≈≈≈
+= JJJ
Le tenseur d’inertie au point A du solide S est égal à la somme du tenseur central d’inertie et du tenseur d’inertie en A du point matériel G affecté de la masse m.
5. Théorème de Huyghens Considérons un solide S, un point A, un vecteur unitaire
u de direction quelconque
et cherchons la valeur du moment d’inertie de S par rapport à l’axe ( )A u,
. Appliquons le théorème de König :
( ) ( ) ( ) ( )( ) ( ) ( )( )uuIuuuuuuImGASuGmGASGSASuA
,,,,,,,,
≈≈≈≈
⋅+=⋅+⋅=⋅= JJJJ
Calculons la valeur du dernier terme de l’expression précédente :
( )( ) ( )( ) ( )( ) ( )2,
,, AGumAGuAGumAGuAGmuuumGA
∧=∧=∧∧⋅=⋅≈ J
Il suffit d'interpréter ( ) 22dAGu =∧
, carré de la distance entres les droites ( )G u,
et
( )A u,
pour obtenir :
( ) ( )2
,,,, dmII SuGSuA +=

CINETIQUE - DYNAMIQUE 17
VI. PUISSANCE
1. Point matériel
On appelle puissance d'une force F appliquée à un point matériel M qui se déplaçe
à la vitesse RMV / par rapport à un repère R, la quantité :
RMM/R VF /⋅=P
2. Système matériel Soit maintenant un système matériel S en mouvement par rapport à un repère R et
un système de forces SSnSS FF /,/,1 ,..., appliquées respectivement en M1,...,Mn.
A. PUISSANCE DES FORCES EXTERIEURES
La puissance des forces extérieures SSiF /, qui s'exercent sur S est égale à la somme des puissances développées par les différentes forces extérieures. C’est à dire :
∑=
∈⋅=ni
i=
RSMSSiRS iVF1
//,/eP (2)
B. PUISSANCE DES FORCES INTERIEURES Considérons le système S comme formé de n points matériels M1,...,Mn.
Le point matériel Mi exerce sur le point matériel Mj une force jiF / et reçoit de ce der-
nier une force ijF / égale et opposée à jiF / .
Pour un couple de points ( )M Mi j, , la puissance développée par ces forces est égale
à : ( )RSMiRSMjjiRSMiijRSMjjiij VVFVFVF /////// ∈∈∈∈= −⋅=⋅+⋅P
ou encore : MiMjji
R
jijiij VF
dt
MMdF /// ⋅=
⋅=P
La puissance de toutes les forces intérieures au système matériel S est alors égale
à la somme des puissances pour tous les couples de points ( )M Mi j, :
∑∑∑−
=>
⋅==1
1
/
i=n
i
j=n
j>i
jiji
ii,j
ijS dt
MMdFPPi
ijF /
Mj
Mi
RSMiV /∈
RSM jV /∈
jiF /

18 ETUDE DANS UN REPERE NON GALILEEN
3. Cas du solide Le système matériel S est maintenant indéformable. Le mouvement de S par rapport à un repère R est décrit par le torseur cinématique suivant :
Ω
≡∈ /
/
RSA
RS
A
S/RV
V
A. PUISSANCE DES FORCES EXTERIEURES
En remplaçant RSMiV /∈ par RSiRSA AMV // Ω∧+∈ dans l’expression (2) on obtient :
( )∑∑ Ω∧⋅+⋅= ∈
n
i=
RSiSSi
n
i=
RSASSiRS AMFVF1
//,
1
//,/eP
( )∑∑ Ω+⋅= ∈
n
i=
RSiSSi
n
i=
SSiRSARS AMFFV1
//,
1
/,// ,,eP
En utilisant les propriétés du produit mixte, le deuxième terme s’écrit :
( ) ( ) ∑∑∑ ∧⋅Ω=Ω=Ωn
i=iSSiRS
n
i=iSSiRS
n
i=
RSiSSi AMFAMFAMF1
/,/
1
/,/
1
//, ,,,,
Et donc : ∑∑ ∧⋅Ω+⋅= ∈
n
i=iSSiRS
n
i=
SSiRSARS AMFFV1
/,/
1
/,//eP
Cette égalité peut encore s’écrire :
SSARSSSRSARS MRV /,//// ⋅Ω+⋅= ∈eP
On reconnaît là le comoment du torseur cinématique S/RV et du torseur des forces
extérieures SS /
M et finalement :
( ) S/RSSS/RSSS/R VMVMeP ⊗==//
,c
B. PUISSANCE DES FORCES INTERIEURES
Dans le cas d’un solide indéformable, le terme R
ji
dt
MMd
est égal à jiRS MM∧Ω / .
Alors : ( ) ( ) 0=,, //// jiRSjijiRSjiij MMFMMF Ω=∧Ω⋅=P
car jiji MMF et / sont colinéaires.
Et donc : 0== ∑> iji,j
ijS PPi
CINETIQUE - DYNAMIQUE 19
VII. ÉNERGIE CINETIQUE
1. Point matériel
Nous avons vu que la puissance développée par une force F s’exerçant sur un point
matériel M se déplaçant à la vitesse RMV / par rapport à un repère R, est égale à :
RMM/R VF /⋅=P Si le mouvement de M est décrit par rapport à un repère galiléen Rg, le principe fon-damental de la dynamique nous permet d’écrire :
gggRMRMM/R VAm // ⋅=P
C’est-à-dire : g
g
g
gRM
R
RMM/R V
dtVd
m //
= ⋅
P
Cherchons de quelle grandeur la puissance gM/RP est la dérivée temporelle.
Il vient :
=2
/ 21
ggRMM/R Vm
dtdP
Posons : 2
/ 21
ggRMM/R VmT =
Cette grandeur scalaire, homogène à une énergie, est appelée énergie cinétique ga-liléenne du point matériel M. On obtient alors la relation suivante :
( )gg M/RM/R T
dtd=P
appelée théorème de l’énergie cinétique pour un point matériel et qui s’énonce :
La dérivée temporelle de l’énergie cinétique galilé enne d’un point matériel est égale à la puissance galiléenne des forces exercées sur ce point.
Par extension, on appelle énergie cinétique d’un point matériel M de masse m animé
d’une vitesse RMV / par rapport à un repère R, la quantité :
2/
21
RMM/R VmT =
2. Système matériel Dans le cas d’un système matériel S en mouvement par rapport à un repère R, l’énergie cinétique totale est simplement égale à la somme des énergies cinétiques de tous les points de ce système.
Énergie qu’on notera : ( )∫∈
∈=SM
S/RMRS dmVT2
/2
dans le cas d’une répartition continue

20 ETUDE DANS UN REPERE NON GALILEEN
et ( )∑=
=∈=
ni
i
S/RMiRS iVmT1
2
/2
dans le cas d’une répartition discrète. Appliquons le théorème de l’énergie cinétique à un point matériel Mi du système S.
On obtient : ( )/RgM/RgM iiT
dtd=P
Ajoutons membres à membres les n égalités obtenues pour les n points Mi de S :
( ) ( ) ( )ggiiii RS
ni
i
RSMi
ni
i/RgM
i=n
i=/RgM
i=n
i/RgM T
dtd
Vmdtd
Tdtd
Tdtd
/1
2/
111 21 =
=
== ∑∑∑∑=
=∈
=
==
P
Explicitons le premier terme de l’égalité précédente :
∑∑=
∈=
⋅=i=n
i
S/RgMi
i=n
i/RgM ii
VF11
P (3)
Le terme iF représente la résultante des forces appliquées sur le point Mi. Il peut
résulter d’actions extérieures au système appliquées en Mi notées SSiF /, et/ou
d’actions intérieures à ce système notées
( )
∑≠=
j=n
ijj
ijF1
/ .
L’égalité (3) devient alors :
( )
∑ ∑∑=
∈
≠==
⋅
+=i=n
i
S/RgM
j=n
ijj
ijSSi
i=n
i/RgM ii
VFF1 1
//,
1
P
Et, en développant :
( )( )
∑ ∑∑∑=
≠=
∈=
∈=
⋅+⋅=i=n
i
j=n
ijj
S/RgMij
i=n
i
S/RgMSSi
i=n
i/RgM iii
VFVF1 1
/
1
/,
1
P
Cette dernière égalité peut se mettre sous la forme :
( ) ( )∑ ∑∑∑= >
∈∈=
∈=
−⋅+⋅=
i=n
i
j=n
ij
S/RgMS/RgMij
i=n
i
S/RgMSSi
i=n
i/RgM jiii
VVFVF1
/
1
/,
1
P
SRS
i=n
i/RgM gi
ie PPP +=∑=
/1
Finalement, on obtient la relation suivante :
( )gg RSSRS T
dtd
// =+ ie PP
appelée théorème de l’énergie cinétique pour un système matériel et qui s’énonce :
La dérivée temporelle de l’énergie cinétique galilé enne d’un système matériel est égale à la puissance galiléenne des forces exté rieures à ce système aug-mentée de la puissance des forces intérieures.

CINETIQUE - DYNAMIQUE 21
3. Cas du solide indéformable
A. THEOREME DE L’ENERGIE CINETIQUE La puissance des forces intérieures d’un solide étant nulle, le théorème de l’énergie cinétique appliqué à un solide indéformable s’écrit simplement de la manière sui-vante :
( )gg RSRS T
dtd
// =eP
et s’énonce :
La dérivée temporelle de l’énergie cinétique galilé enne d’un solide indéfor-mable est égale à la puissance galiléenne des force s extérieures appliquées à ce solide.
B. EXPRESSION DE L’ENERGIE CINETIQUE Le mouvement du solide S est défini par le torseur cinématique :
Ω
≡∈S/RA
S/R
A
S/RV
V
En remplaçant RSMV /∈ par RSRSA MAV // Ω∧+∈ dans la définition de l’énergie ciné-tique on obtient :
( )∫∈
∈∈ ⋅Ω∧+=SM
RSMRSRSARS dmVMAVT ////2
En développant, il vient :
( )∫∫∈
∈
∈
∈∈ Ω+⋅=SM
RSMRS
SM
RSMRSARS dmVMAdmVVT ///// , ,2
En utilisant les propriétés du produit mixte on obtient :
∫∫∈
∈
∈
∈∈ ∧⋅Ω+⋅=SM
RSMRS
SM
RSMRSARS dmVAMdmVVT /////2
On reconnaît là le comoment du torseur cinématique S/RV et du torseur cinétique
RS /Σ et on peut écrire :
( ) RSRSRSRSRST ///// ,c2 VV ⊗Σ=Σ= Continuons le développement :
( ) ( )∫∫∈
∈
∈
∈∈ Ω∧+∧⋅Ω+Ω∧+⋅=SM
S/RS/RARS
SM
S/RS/RAS/RARS dmMAVAMdmMAVVT // 2
( ) ( ) ( )( )∫
∈
∈∈∈
Ω∧∧⋅Ω+
Ω+Ω+=
SM
S/RS/R
S/RARSS/RS/RAS/RARS
dmMAAM
VAGm,GAVmVmT , , ,2 /2
/
Finalement, en utilisant les propriétés du produit mixte :
( ) ( ) ( )∫∈
∈∈ Ω∧∧⋅Ω−Ω+=SM
S/RS/RS/RS/RAS/RARS dmAMAMAG,VmVmT ,222
/

22 ETUDE DANS UN REPERE NON GALILEEN
VIII. RESUME (CAS DU SOLIDE)
1. Moment cinétique Expression en un point quelconque A :
( ) RSARSA,SRSA VAGm ///, ∈
≈
∧+Ω=σ J
Expression au centre d’inertie G :
( )RSG,SRSG //, Ω=σ
≈
J
Expression en un point P de vitesse nulle :
( )RSP,SRSP //, Ω=σ
≈
J
2. Moment dynamique Expression en un point quelconque A (d’un système quelconque) :
( ) RSGRA
RRSARA,S VVm
dtd
///,/ ∈∧+
σ=δ
Expression au centre d’inertie G :
( )R
RSGRG,S dtd
σ=δ /,/
Expression en un point P de vitesse nulle :
( )R
RSPRP,S dtd
σ=δ /,/
3. Énergie cinétique ( ) RSRSRSRSRST ///// ,c2 VV ⊗Σ=Σ=
Expression en un point quelconque A :
( ) ( ) ( )AG,VmVmT S/RS/RAS/RAS/RSA
S/RRS ,222
,/ Ω++Ω⋅Ω= ∈∈
≈
J
Expression au centre d’inertie G :
( ) ( )2,/2 S/RGS/RSG
S/RRS VmT ∈
≈
+Ω⋅Ω= J
Expression en un point P de vitesse nulle :
( )S/RSP
S/RRST Ω⋅Ω=≈
,/2 J

CINETIQUE - DYNAMIQUE 23
IX. APPLICATIONS
1. Solide en rotation autour d’un axe fixe
A. PARAMETRAGE DU PROBLEME Soit un solide S de forme quelconque, de masse m et de centre d’inertie G en liaison pivot supposée parfaite avec un bâti S0 auquel est lié le repère galiléen
),,,( 0000 zyxOR
= .
La liaison pivot est d’axe ( , )O z
0 . Le repère ),,,( zyxOR
= , lié à S, est choisi, pour simplifier les calculs, tel que le plan ( , , )O z x
0 contienne le point G.
On notera : )(),( 0 txx θ=
et : 0zcxaOG
+= Le solide S étant quelconque, sa matrice d’inertie au point O, dans la base
),,( 0zyxb
= , est de la forme :
bO
SO
CDE
DBF
EFA
−−−−−−
=≈
,J
B. B ILAN DES FORCES EXTERIEURES EXERCEES SUR 1 • Les actions de la liaison pivot sont représentées, en O, par le torseur :
bO
L/
ML
ZYX
≡0,,
,,SS0
M
• Sur S s’exerce également l’action mécanique, supposée connue, d’un ensemble
matériel E, représentée au point O, par le torseur :
bEE
EEE
O
E/SML
ZYX
≡0,,
,,M
Lorsque S est la roue d’un véhicule, E est constitué par la route, la pesanteur, l’arbre de transmission...
θ
x
y
z0
y0
x0
G
O c a
θ
S0
S

24 ETUDE DANS UN REPERE NON GALILEEN
C. TORSEUR CINEMATIQUE Le mouvement de 1 par rapport à 0 est décrit par le torseur cinématique suivant :
θ=∧Ω=
θ=Ω≡
=
θ=Ω≡
∈∈ yaOGV
z
V
z
S/SS/SG
S/S
GS/SO
S/S
O
S/S ɺ
ɺɺ
00
0
0
0
0
00
0 V
D. TORSEUR DYNAMIQUE
Résultante dynamique : ( )xyamAmD S/SGS/Sɺɺɺ 2 00 θ−θ== ∈
Moment dynamique : Le point O ayant une vitesse nulle, le moment dynamique sera exprimé en ce point.
( ) ( )0
0
0,
0
000
+−−θ=
Ω=
σ=δ≈
zCyDxEdtd
dtd
dtd
S/SSOO,S/SO,S/S
ɺJ
Finalement : ( )
( ) ( )
−θ++−−θ
θ−θ≡∆
yExDzCyDxE
xyam
O
S/S ɺɺɺ
ɺɺɺ
2
0
2
0
E. PRINCIPE FONDAMENTAL DE LA DYNAMIQUE Le P.F.D. nous permet d’écrire 6 équations scalaires : • 3 équations de projection de la résultante dynamique :
sur x : 2 θ−=+ ɺamXX E
sur y : θ=+ ɺɺ amYY E sur z0 : 0=+ EZZ
• 3 équations de projection du moment dynamique :
sur x : EDLL E 2 θ−θ=+ ɺɺɺ
sur y : θ−θ−=+ ɺɺɺ 2 DEMM E
sur z0 : θ= ɺɺ CNE Équations à partir desquelles on peut exprimer facilement les inconnues de liaison X, Y, Z, L, M. La dernière équation permet de déterminer le mouvement : • Inconnues de liaison :
E
E
E
E
E
MDEM
LEDL
ZZ
YamY
XamX
−θ−θ−=
−θ−θ=
−=−θ=
−θ−=
ɺɺɺ
ɺɺɺ
ɺɺ
ɺ
2
2
2
• Équation du mouvement : 0=−θCNEɺɺ
CINETIQUE - DYNAMIQUE 25
2. Équilibrage Un des problèmes essentiels en fabrication est l’équilibrage des solides tournant au-tour d’un axe fixe. Cela, afin d’éviter la naissance de vibrations mécaniques pouvant engendrer une détérioration rapide des paliers, ou plus simplement créer une gêne à l’utilisation du matériel, dont le bruit.
A. CONDITIONS D’EQUILIBRAGE . Pour éviter les vibrations, il faut rendre l’action mécanique dans la liaison entre S et S0 aussi constante que possible. En particulier, indépendante du mouvement de 1 par rapport à S0, c’est à dire de ɺ ɺɺθ θ et . D’après les équations précédentes, ces conditions d’équilibrage nous donnent : 0=a : le centre d’inertie G est sur l’axe de rotation )z,( 0
O (équilibrage statique) ;
0== ED : l’axe de rotation )z,( 0
O est axe principal d’inertie de S (équilibrage
dynamique). Remarque : Dans un équilibrage statique ( 0=a ), seule la résultante générale de l’action mécanique de S sur S0 est indépendante du mouvement par rapport à S0.
B. REALISATION PRATIQUE DE L ’EQUILIBRAGE DYNAMIQUE . On remplace S par un solide S’ constitué de S et de deux solides S1 et S2, assimi-lables à des points matériels, tel que S’ soit dynamiquement équilibré. Soit mi la masse du solide Si (i = 1, 2) placé au point Mi de coordonnées cartésiennes xi, yi, zi dans le repère R. Notons G’ le centre d’inertie de S’ et D’ et E’ les produits d’inertie de S’ par rapport aux axes du repère R. S’ est dynamiquement équilibré si G’ est sur l’axe ( )O z,
0 et si 0=′=′ ED .
Traduisons ces conditions : • La position du centre d’inertie G’ est donnée par la relation :
21
2211
mmmOMmOMmOGm
GO++
++=′ .
Si G’ est sur l’axe ( )O z,
0 cette équation vectorielle s’écrit en projection :
sur x : ma m x m x+ + =1 1 2 2 0 (4) sur y : m y m y1 1 2 2 0+ = (5) • Les produits d’inertie E’ et D’ ont pour valeur :
0' 222111 =++= zymzymDD (6) E E+m x z m x z' = + =1 1 1 2 2 2 0 (7) Remarque : si D est différent de zéro (cas général) l’équilibrage dynamique ne peut se faire avec une seule masse. En effet, si par exemple m2 0= , à partir des relations précédentes, on obtient : y1 0= et donc 0=D ce qui est incompatible avec l’hypothèse de départ.
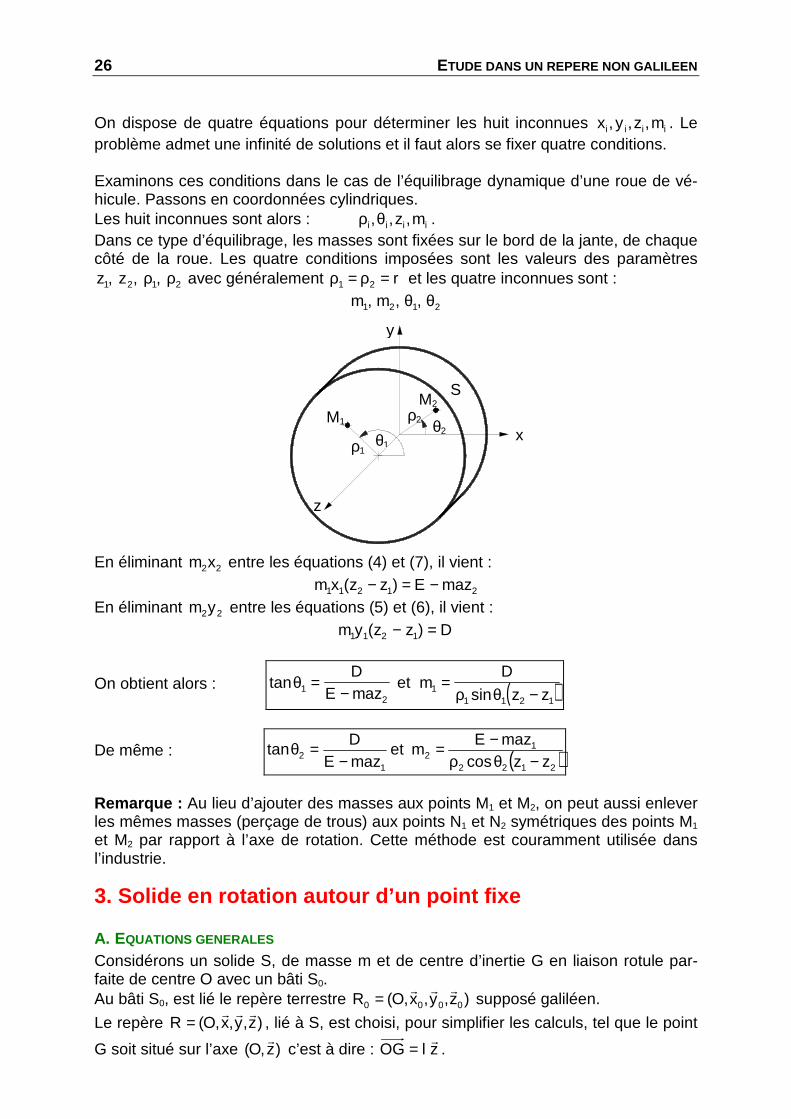
26 ETUDE DANS UN REPERE NON GALILEEN
On dispose de quatre équations pour déterminer les huit inconnues x y z mi i i i, , , . Le problème admet une infinité de solutions et il faut alors se fixer quatre conditions. Examinons ces conditions dans le cas de l’équilibrage dynamique d’une roue de vé-hicule. Passons en coordonnées cylindriques. Les huit inconnues sont alors : ρ θi i i iz m, , , . Dans ce type d’équilibrage, les masses sont fixées sur le bord de la jante, de chaque côté de la roue. Les quatre conditions imposées sont les valeurs des paramètres z1, z 2 1 2, ,ρ ρ avec généralement r=ρ=ρ 21 et les quatre inconnues sont :
m , m , , 1 2 1 2θ θ En éliminant m x2 2 entre les équations (4) et (7), il vient :
m x z z E maz1 1 2 1 2( )− = − En éliminant m y2 2 entre les équations (5) et (6), il vient :
m y z z D1 1 2 1( )− =
On obtient alors : ( )tansin
θρ θ1
21
1 1 2 1
=−
=−
DE maz
mD
z z et
De même : ( )2122
12
12 cos
et tanzz
mazEm
mazED
−θρ−=
−=θ
Remarque : Au lieu d’ajouter des masses aux points M1 et M2, on peut aussi enlever les mêmes masses (perçage de trous) aux points N1 et N2 symétriques des points M1 et M2 par rapport à l’axe de rotation. Cette méthode est couramment utilisée dans l’industrie.
3. Solide en rotation autour d’un point fixe
A. EQUATIONS GENERALES Considérons un solide S, de masse m et de centre d’inertie G en liaison rotule par-faite de centre O avec un bâti S0. Au bâti S0, est lié le repère terrestre ),,,( 0000 zyxOR
= supposé galiléen.
Le repère ),,,( zyxOR
= , lié à S, est choisi, pour simplifier les calculs, tel que le point
G soit situé sur l’axe ( , )O z
c’est à dire : zlOG
= .
θ2 x
y
z
ρ1 θ1
M1
S M2
ρ2
CINETIQUE - DYNAMIQUE 27
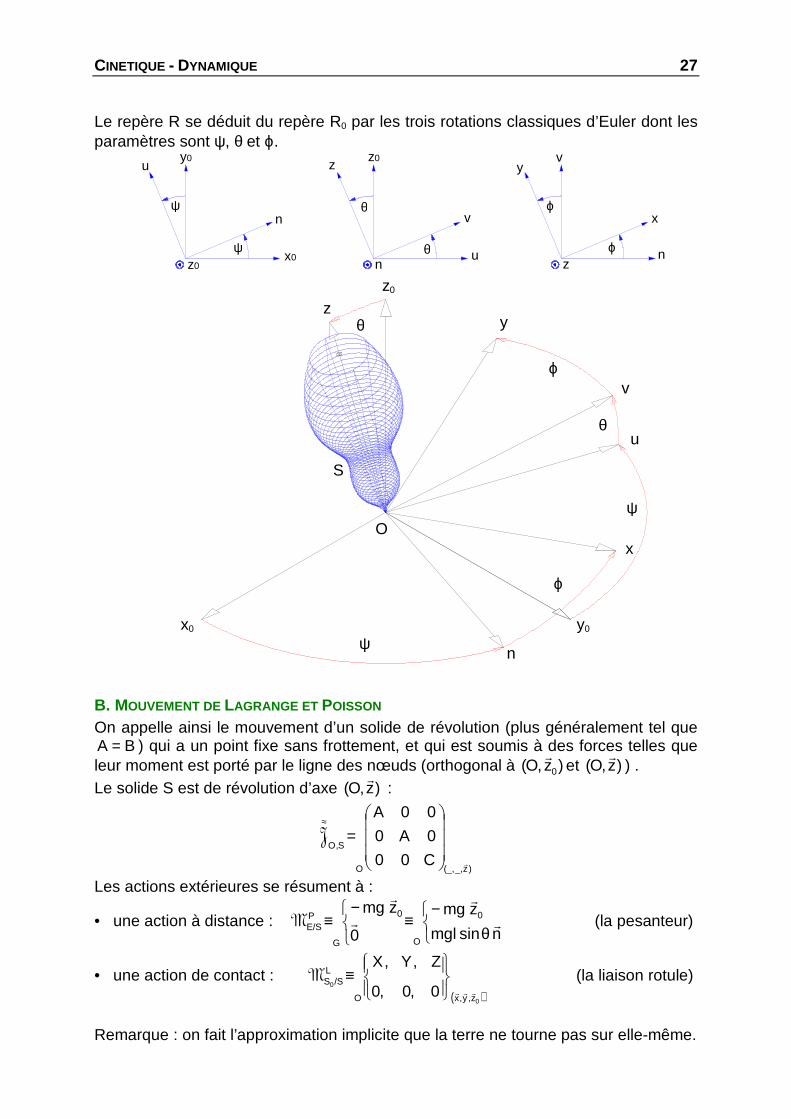
Le repère R se déduit du repère R0 par les trois rotations classiques d’Euler dont les paramètres sont ψ, θ et ϕ.
B. MOUVEMENT DE LAGRANGE ET POISSON On appelle ainsi le mouvement d’un solide de révolution (plus généralement tel que
BA = ) qui a un point fixe sans frottement, et qui est soumis à des forces telles que leur moment est porté par le ligne des nœuds (orthogonal à ( , )O z
0 et ( , )O z
) .
Le solide S est de révolution d’axe ( , )O z
:
)_,(_,
,
00
00
00
zO
SO
C
A
A
=≈
J
Les actions extérieures se résument à :
• une action à distance :
θ−
≡−
≡nmgl
zmgzmg
OG
PE/S
sin
0
00M (la pesanteur)
• une action de contact : ( )0
0
,,
SS0,0,0
,,
zyxO
L/
ZYX
≡M (la liaison rotule)
Remarque : on fait l’approximation implicite que la terre ne tourne pas sur elle-même.
ϕ
θ
ϕ
θ
ψ
ψ O
x
y0
z0
x0
y z
n
u
v
S
v z
ϕ
x
n
y
ϕ
z0 n θ
v
u z
θ
y0 z0
ψ
n
x0
u
ψ

28 ETUDE DANS UN REPERE NON GALILEEN
Les trois équations du mouvement seront obtenues à partir : • du théorème du moment dynamique exprimé au point O (pour annuler les actions
de la liaison) en projection sur les axes z et z0 :
zzM RSOSSO
⋅δ=⋅0/,/,
0/,0/,0
zzM RSOSSO
⋅δ=⋅
• du théorème de l’énergie cinétique (car, la liaison étant parfaite, et seule la pesan-teur exerçant une action, il existe une intégrale première) :
teS/RRS cUT +=∫ 00
=/ eP
Nous « travaillerons » dans la base ( ) n v z, , car dans cette base, l’opérateur d’inertie
est le même que dans la base ( ) x y z, , et le vecteur rotation a une expression simple
à établir :
( )( ) θψ+ϕ
θψθ
=ϕ+θ+=
θ+θψ=ϕ+θ+ψ=Ωcos
sin
z
sin cos
,,0
0/ 0
ɺɺ
ɺ
ɺɺ
ɺ
ɺ
ɺ
ɺɺ
zvn
RS znvzznz
Calcul du moment cinétique
Le point O étant fixe, on a : ( )00// RS
O,SRO,S Ω=σ≈
J
( )( )θψ+ϕ
θψθ
=
θψ+ϕθψ
θ⋅
=σcos
sin
cos
sin
00
00
00
,,
/, 0
ɺɺ
ɺ
ɺ
ɺɺ
ɺ
ɺ
C
A
A
C
A
A
zvn
RSO
Théorème du moment dynamique en projection sur z
• D’une part : 0/, =⋅ zM SSO
; car zn
⊥
• D’autre part : ( ) ( ) ( )zdtd
zdtd
zdtd
z RSORSORSORSO
⋅σ−⋅σ=⋅σ=⋅δ
0000 /,/,/,/,
Or, on sait que : ( ) ( )( ) 0
sin
,,
0/ 0 θ−θψ
=∧θ+ψ=∧Ω= ɺ
ɺɺ
ɺ
zvn
Rz znzzzdtd
Et donc : ( )( )
0
0
sin
cos
sin
0/, =θ−θψ
⋅θψ+ϕ
θψθ
=⋅σ ɺ
ɺ
ɺɺ
ɺ
ɺ
C
A
A
zdtd
RSO
On obtient finalement : ( ) 00/, =⋅σ z
dtd
RSO
C’est-à-dire : teRSO cz =⋅σ
0/,
Relation que l’on écrira : 0cos r=θψ+ϕ ɺɺ (8)

CINETIQUE - DYNAMIQUE 29
Théorème du moment dynamique en projection sur 0z
• D’une part : 00/, =⋅ zM SSO
; car 0zn
⊥
• D’autre part : ( ) ( )0/,0/,0/, 000z
dtd
zdtd
z RSORSORSO
⋅σ=⋅σ=⋅δ
car z0 est un axe fixe.
On obtient finalement : ( ) 00/, 0=⋅σ z
dtd
RSO
C’est-à-dire : 00 0/, z
teRSO Scz ==⋅σ
Cela revient à dire qu’il y a conservation de la projection du moment cinétique sur 0z
.
Cette relation nous donne :
( )( )
0coscos sin
cos
sin
0
cos
sin
2
zSCA
C
A
A
=θψ+ϕθ+θψ=θ
θ⋅θψ+ϕ
θψθ
ɺɺɺ
ɺɺ
ɺ
ɺ
Soit, en tenant compte de la relation (8) :
0cos sin 0
2zSrCA =θ+θψɺ (9)
Théorème de l’énergie cinétique (seul le poids trav aille) • Calculons la puissance :
dtdU
lgmznz
nlgm
zgm
OO
RSPoidsRS =θθ= ϕ+θ+ψ
θ−
== ⊗⊗ sin0
sin00
// 00
ɺ
ɺ
ɺɺ
VMPe
On en déduit : hlgmU +θ−= cos • Calculons l’énergie cinétique :
( ) ( ) ( )2222/
,// cossin2 000
θψ+ϕ+θψ+θ=Ω⋅Ω= ɺɺɺɺ CAT RSSO
RSRS J
Il vient alors : ( ) hlgmrCA 2cos2sin 2
0222 +θ−=+θψ+θ ɺɺ
C’est à dire : ( ) 20
222 2cos2sin rChlgmA −=θ+θψ+θ ɺɺ (10)
Les équations du mouvement de Lagrange et Poisson (8), (9) et (10) peuvent s’écrire sous la forme d’un système différentiel du premier ordre, en ψ, θ et ϕ tel que :
( )
=θψ+ϕ
=θ+θψ
−=θ+θψ+θ
0
02
20
222
cos
cos sin
2cos2sin
0
r
SrCA
rChlgmA
z
ɺɺ
ɺ
ɺɺ
où h, r0 et Sz0 sont des constantes données par les conditions initiales.
30 ETUDE DANS UN REPERE NON GALILEEN
X. ETUDE DANS UN REPERE NON GA-LILEEN Les études précédentes ont été effectuées dans l’hypothèse où le repère terrestre est considéré comme galiléen. Si, dans de nombreux cas, cette hypothèse se révèle satisfaisante, elle ne l’est pas systématiquement et on est amené à prendre comme repère galiléen, soit un repère géocentrique soit un repère héliocentrique (ou de Copernic). Dans ce cas, l’étude d’un phénomène terrestre décrit dans le repère relatif terrestre fait apparaître des composantes pudiquement appelées forces d’inerties d’entraînement et complémentaires (ou de Coriolis). Il en va de même lorsque, le repère terrestre étant considéré comme galiléen, on étudie un mouvement dans un repère relatif (exemple du mouvement d’une toupie sur le plateau d’un manège observé par un utilisateur de ce dernier). Et, n’oublions pas la statique en repère relatif, mise en évidence par d’Alembert, en 1743 dans son traité de dynamique et qui entraîne la question fatidique :
« pourquoi le cycliste penché lors un virage ne tom be-t-il pas ? »
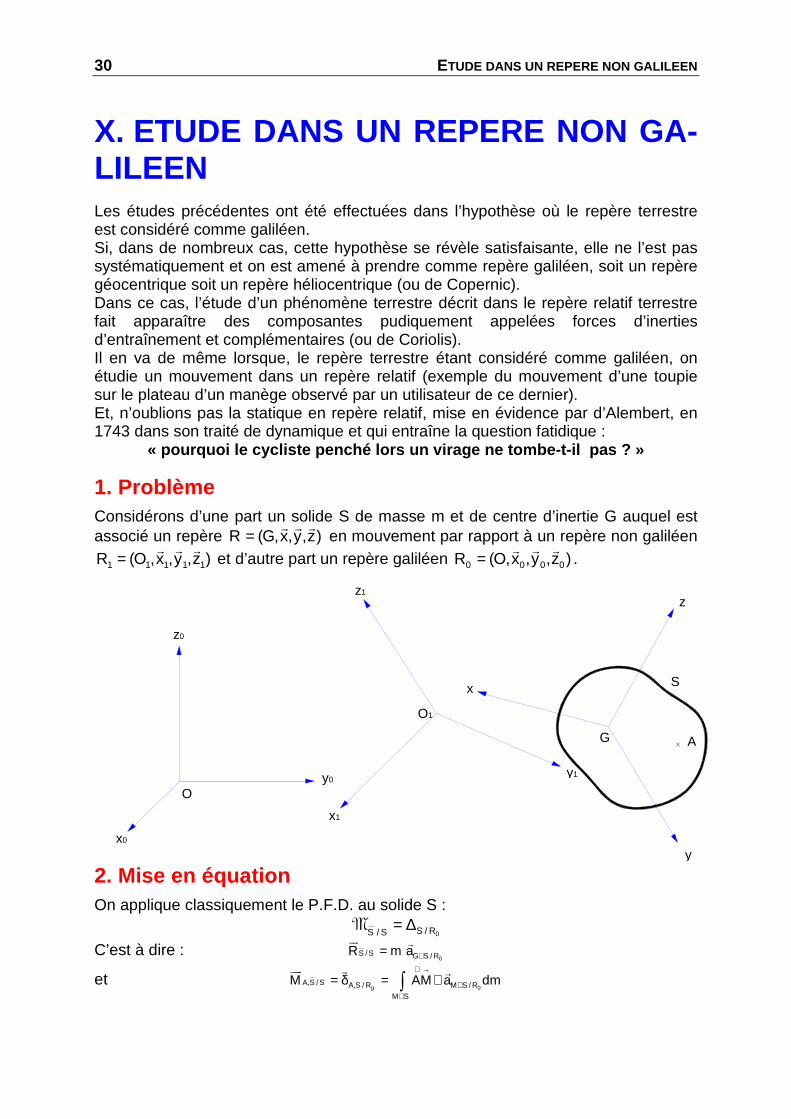
1. Problème Considérons d’une part un solide S de masse m et de centre d’inertie G auquel est associé un repère ),,,( zyxGR
= en mouvement par rapport à un repère non galiléen
),,,( 11111 zyxOR
= et d’autre part un repère galiléen ),,,( 0000 zyxOR
= .
2. Mise en équation On applique classiquement le P.F.D. au solide S :
0// RSSS∆=M
C’est à dire : 0
/ / S S G S RR m a ∈=
et 0
, / , / /gA S S A S R M S R
M S
M AM a dm→
∈∈
= δ = ∧∫
x1
O
A
z0
y0
x0
y1
z1
O1
G
x
y
z
S

CINETIQUE - DYNAMIQUE 31
Si on désire faire apparaître le mouvement relatif de S par rapport à R1 dans les équations du mouvement, il suffit de calculer l’accélération en tenant compte du re-père intermédiaire R1. On sait que pour un point quelconque A de S, l'accélération peut s’écrire sous une forme condensée de la manière suivante :
( ) ( ) ( ) ( )A A A Aa r c ea a a a= + +
Si on pose : ( )
( )
r PSrS
r PSA
a dm
AP a dm
∆ ≡
∧
∫∫∫
∫∫∫
Torseur des quantités d’accélération relative
( )
( )
e PSeS
e PSA
a dm
AP a dm
∆ ≡
∧
∫∫∫
∫∫∫
Torseur des quantités d’accélération d’entraînement
( )
( )
c PScS
c PSA
a dm
AP a dm
∆ ≡
∧
∫∫∫
∫∫∫
Torseur des quantités d’accélération de Coriolis alors : c
SeS
rSRgS ∆+∆+∆=∆ /
et principe fondamental s’écrit alors :
SScS
eS
rS /
M=∆+∆+∆
C’est-à-dire : cS
eSSS
rS ∆−∆−=∆
/M
Pour appliquer le principe fondamental de la dynamique « dans un repère non gali-léen », il faut ajouter à l’action mécanique
SS /M que subit le système matériel
l’opposé des quantités d’accélération d’entraînement eS∆− et de Coriolis c
S∆− . Ces quantités, qui viennent s’ajouter à l’action mécanique réelle, peuvent être inter-prétées comme des actions mécaniques « fictives » qui sont appelés usuellement « action d’inertie d’entraînement » et « action d’inertie de Coriolis ». On ne saurait trop mettre en garde contre ce point de vue. Une fois admise l’existence de référentiels privilégiés, le point de vue galiléen pré-sente l’intérêt majeur de définir les actions mécaniques comme les causes uniques des mouvements que l’on observe. Au contraire, les actions d’inertie qui apparais-sent quand on se place dans un référentiel non galiléen ne sont que les consé-quences du mouvement du référentiel d’observation.
32 ETUDE DANS UN REPERE NON GALILEEN
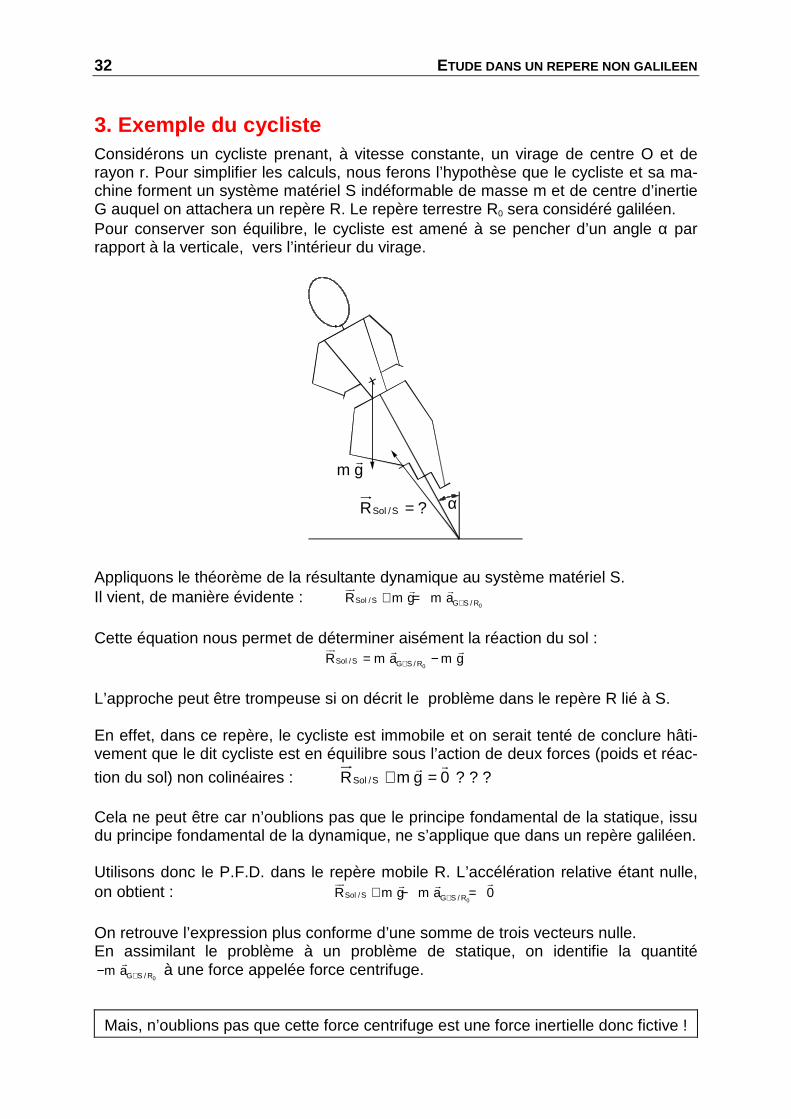
3. Exemple du cycliste Considérons un cycliste prenant, à vitesse constante, un virage de centre O et de rayon r. Pour simplifier les calculs, nous ferons l’hypothèse que le cycliste et sa ma-chine forment un système matériel S indéformable de masse m et de centre d’inertie G auquel on attachera un repère R. Le repère terrestre R0 sera considéré galiléen. Pour conserver son équilibre, le cycliste est amené à se pencher d’un angle α par rapport à la verticale, vers l’intérieur du virage. Appliquons le théorème de la résultante dynamique au système matériel S. Il vient, de manière évidente :
0/ / Sol S G S RR m g m a ∈+ =
Cette équation nous permet de déterminer aisément la réaction du sol :
0/ / Sol S G S RR m a m g∈= −
L’approche peut être trompeuse si on décrit le problème dans le repère R lié à S. En effet, dans ce repère, le cycliste est immobile et on serait tenté de conclure hâti-vement que le dit cycliste est en équilibre sous l’action de deux forces (poids et réac-
tion du sol) non colinéaires : 0 /
=+ gmR SSol ? ? ?
Cela ne peut être car n’oublions pas que le principe fondamental de la statique, issu du principe fondamental de la dynamique, ne s’applique que dans un repère galiléen. Utilisons donc le P.F.D. dans le repère mobile R. L’accélération relative étant nulle, on obtient :
0/ / 0Sol S G S RR m g m a ∈+ − =
On retrouve l’expression plus conforme d’une somme de trois vecteurs nulle. En assimilant le problème à un problème de statique, on identifie la quantité
0/ G S Rm a ∈−
à une force appelée force centrifuge.
Mais, n’oublions pas que cette force centrifuge est une force inertielle donc fictive !
m g
?/ =SSolR α


















