
Chapter4(4.1~4.3)
88
Chapter 4 Euclidean Vector Spaces 4.1 Euclidean n-Space 4.2 Linear Transformations from R n to R m 4.3 Properties of Linear Transformations R n to R m
-
Upload
rezif-sugandi -
Category
Documents
-
view
3 -
download
0
description
alin
Transcript of Chapter4(4.1~4.3)

Chapter 4 Euclidean Vector Spaces
4.1 Euclidean n-Space4.2 Linear Transformations from Rn to Rm
4.3 Properties of Linear Transformations Rn to Rm

4.1 Euclidean n-Space

DefinitionVectors in n-Space
If n is a positive integer, then an ordered n-tuple is a sequence of n real numbers (a1,a2,…,an).. The set of all ordered n-tuple is called n-space and is denoted by Rn

Definition Two vectors u=(u1 ,u2 ,…,un) and v=(v1 ,v2 ,…, vn) in Rn are
called equal if
The sum u+v is defined by
and if k is any scalar, the scalar multiple ku is defined by
nn v u,..., v, uvu 2211
),...,, 2211 nn vuvuv(u vu
),...,,( 21 nkukukuk u

The operations of addition and scalar multiplication in this definition are called the standard operations on Rn.
The Zero vector in Rn is denoted by 0 and is defined to be the vector 0=(0,0,…,0)
If u=(u1 ,u2 ,…,un) is any vector in Rn , then the negative( or additive inverse) of u is denoted by –u and is defined by -u=(-u1 ,-u2 ,…,-un)
The difference of vectors in Rn is defined by v-u=v+(-u) =(v1-u1 ,v2-u2 ,…,vn-un)
Theorem 4.1.1Properties of Vector in Rn
If u=(u1 ,u2 ,…,un), v=(v1 ,v2 ,…, vn) , and w=(w1 ,w2 ,…, wn) are vectors in Rn and k and l are scalars, then:
(a) u+v = v+u (b) u+(v+w) = (u+v)+w(c) u+0 = 0+u = u (d) u+(-u) = 0; that is u-u = 0(e) k(lu) = (kl)u (f) k(u+v) = ku+kv(g) (k+l)u = ku+lu (h) 1u = u

Definition Euclidean Inner Product
If u=(u1 ,u2 ,…,un), v=(v1 ,v2 ,…, vn) are vectors in Rn , then the Euclidean inner product u٠v is defined by
nnvuvuvu ...2211vu

Example 1Inner Product of Vectors in R4
The Euclidean inner product of the vectors
u=(-1,3,5,7) and v=(5,-4,7,0)in R4 is
u٠v=(-1)(5)+(3)(-4)+(5)(7)+(7)(0)=18

Theorem 4.1.2Properties of Euclidean Inner Product
If u, v and w are vectors in Rn and k is any scalar, then(a) u٠v = v٠u (b) (u+v)٠w = u٠w+ v٠w
(c) (k u)٠v = k(u٠v)
(d) Further, if and only if v=0
0vv 0vv

Example 2Length and Distance in R4
(3u+2v)٠(4u+v) = (3u)٠(4u+v)+(2v)٠(4u+v)
= (3u)٠(4u)+(3u)٠v
+(2v)٠(4u)+(2v)٠v
=12(u٠u)+11(u٠v)+2(v٠v)

Norm and Distance in Euclidean n-Space We define the Euclidean norm (or Euclidean length) of
a vector u=(u1 ,u2 ,…,un) in Rn by
Similarly, the Euclidean distance between the points u=(u1 ,u2 ,…,un) and v=(v1 , v2 ,…,vn) in Rn is defined by
222
21
21
...( nuuu) uuu
2222
211 )(...)()(),( nn vuvuvud vuvu

Example 3Finding Norm and Distance If u=(1,3,-2,7) and v=(0,7,2,2), then in the
Euclidean space R4
2222
2222
)27()22()73()01(),(
7363)7()2()3()1(
vu
u
d
and
Theorem 4.1.3Cauchy-Schwarz Inequality in Rn
If u=(u1 ,u2 ,…,un) and v=(v1 , v2 ,…,vn) are vectors in Rn, then
vuvu

Theorem 4.1.4Properties of Length in Rn
If u and v are vectors in Rn and k is any scalar, then
)inequality (Triangle (d)
(c)
ifonly and if 0 (b)
0 (a)
vuvu
uu
0uu
u
kk

Theorem 4.1.5Properties of Distance in Rn
If u, v, and w are vectors in Rn and k is any scalar, then:
)inequality (Triangle ),(),(),( (d)
),(),( (c)
ifonly and if 0),( (b)
0),( (a)
vwwuvu
uvvu
vuvu
vu
ddd
dd
d
d

Theorem 4.1.6 If u, v, and w are vectors in Rn with
the Euclidean inner product, then
22
4
1
4
1vuvuvu

Definition Orthogonality
Two vectors u and v in Rn are called orthogonal if u٠v=0

Example 4Orthogonal Vector in R4
0)1)(4()0)(1()2)(3()1)(2(
since ,orthogonal are
)1 ,0 ,2 ,1( and )4 ,1 ,3 ,2(
vectors the spaceEuclidean In the 4
vu
vu
R

Theorem 4,1,7Pythagorean Theorem in Rn
thenproduct,inner Euclidean which theR
in vectorsorthogonal areand If
222
n
vuvu
v u
Alternative Notations for Vectors in Rn (1/2)
nnnnnn
n
n
n
ku
ku
ku
u
u
u
k k
uu
uu
uu
v
v
v
u
u
u
uuu
u
u
u
uuu
,
... or
matrixcolumn aor matrix row a asnotation matrix in R
in ),...,,( vector a write tousefuloften isIt
2
1
2
1
22
11
2
1
2
1
212
1
n
21
uvu
uu
u

Alternative Notations for Vectors in Rn (2/2)
)(
) ..., , ,(), ... , ,(
operation vector theas results same theproduce
...
... ...
or
2211
2121
2121
1211
2121
nn
nn
nn
nn
nn
v, ..., uv, uvu
vvvuuu
... ku kukuuuukk
v ... uv uvu
vvvuuu
vu
u
vu

A Matrix Formula for the Dot Product(1/2)
)(
v u ...v uvu
u
u
u
... v vv
v
v
v
u
u
u
nn
n
n
nn
7
productinner Euclidean for the formula
following thehave enotation wmatrix column in sfor vector Thus,
and
vectorsfor thenotation matrix column use weIf
22112
1
21
2
1
2
1
uvvu
vuvu
uv
vu
T
T

A Matrix Formula for the Dot Product(2/2)
T
If is a matrix, then it follows form
formula (7) and properties of the transpose
that
A (A ) ( A) ( A
( ( (
T T T T
T T T T T T
A n n
A
A A A A A
A
u v v u v u v) u u v
u v v) u v )u v u) u v
u 8
9
T
T
A ( )
A A ( )
v u v
u v u v

Example 5Verifying That vuvu TAA
11)1(4)4(2)7)(1(
11)5(5)0(10)2(7
1
4
7
5
0
2
1 1 3
0 4 2
1 2 1
5
10
7
4
2
1
101
142
321
Then
5
0
2
,
4
2
1
,
101
142
321
thatSuppose
vu
vu
v
u
vu
T
T
A
A
A
A
A

A Dot Product View of Matrix Multiplication (1/2)
rj
j
j
irii
rjirjiji
ijij
b
b
b
Bj
... a aa
Ai
bababa
ABij
nrbBrmaA
2
1
21
2211
oftor column vecth theand
of vector rowth theofproduct dot theisWhich
...
is ofentry th then the
matrix, an is andmatrix an is If
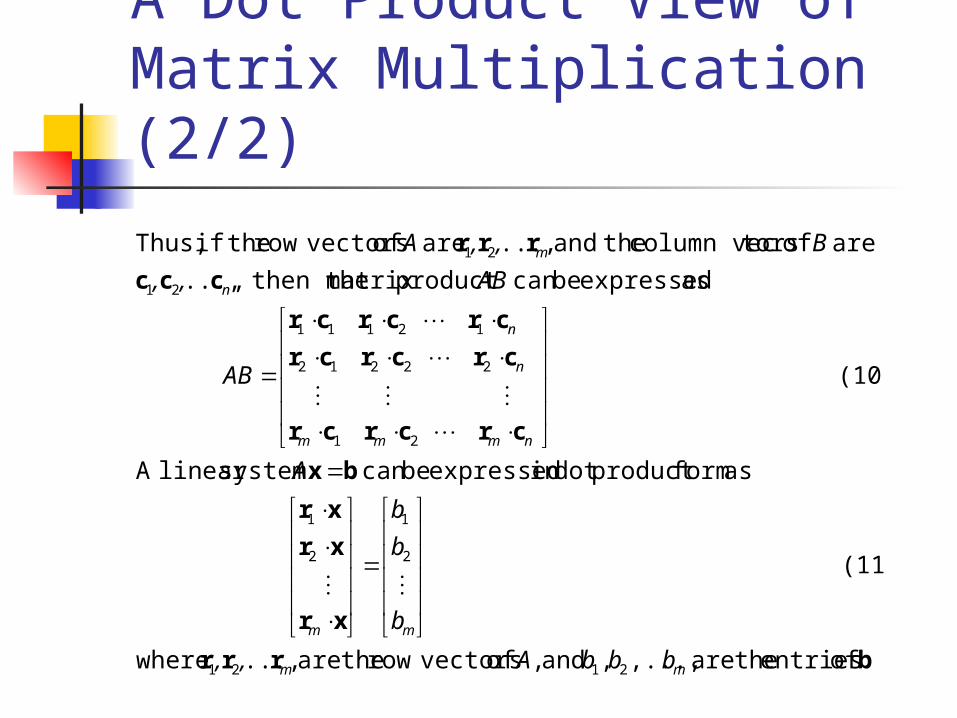
A Dot Product View of Matrix Multiplication (2/2)
brrr
xr
xr
xr
b x
crcrcr
crcrcr
crcrcr
ccc
rrr
of entries theare ,...,, and , of vectorsrow theare ..., where
(11)
as formproduct dot in expressed becan systemlinear A
(10)
as expressed becan product matrix then the,...,
are of torscolumn vec theand ..., are of vectorsrow theif Thus,
2121
2
1
2
1
21
22212
12111
21
21
mm
mm
nmmm
n
n
n
m
bbbA,,
b
b
b
A
AB
AB,,
B,,A

Example 6 A Linear System Written in Dot Product Form
085
5472
143
321
321
321
xx x
xxx
xxx
(11) from expressed systemlinear a of examplean is following The
0
5
1
),,()8,5,1(
),,()4,7,2(
),,()1,4,3(
321
321
321
xxx
xxx
xxx
System Dot Product Form

4.2 Linear Transformations From Rn to Rm

Functions from Rn to RFormula Example Classification Description
Real-valued function of a real variable
Function from R to R
Real-valued function of two real variable
Function from R2 to R
Real-valued function of three real variable
Function from R3 to R
Real-valued function of n real variable
Function from Rn to R
)(xf 2)( xxf
),( yxf22),( yxyxf
),,( zyxf 22
2
),,(
zy
xzyxf
),...,,( 21 nxxxf22
221
21
...
),...,,(
n
n
xxx
xxxf

Functions from Rn to Rm
(1/2) If the domain of a function f is Rn and the
codomain is Rm, then f is called a map or transformation from Rn to Rm , and we say that the function f maps Rn into Rm. We denote this by writing f :
In the case where m=n the transformation f : is called an operator on Rn
mn RR
mn RR
Functions from Rn to Rm
(2/2)
Suppose that f1,f2,…,fm are real-valued functions of n real variables, say
w1=f1 (x1,x2,…,xn)
w2=f2 (x1,x2,…,xn)
wm=fm (x1,x2,…,xn)
These m equations assign a unique point (w1,w2,…,wm) in Rm to each point (x1,x2,…,xn) in Rn and thus define a transformation from Rn to Rm. If we denote this transformation by T: then
T (x1,x2,…,xn)= (w1,w2,…,wm)
mn RR

Example 1 32 R toR fromtion TransformaA
)3,6,1()2,1( example,for Thus,
),3,()
.ation transforma define
3
equations The
22
21212121
32
22
213
212
211
T
xxxxxx,xT(x
RT:R
xxw
xxw
xxw

mn RR to from tionsTransformaLinear
nmnmmm
nn
nn
xaxaxaw
xaxaxaw
xaxaxaw
...
...
...
2211
22221212
12121111
xw A
aaa
aaa
aaa
w
w
mmm
by briefly moreor
w
notationmatrix in or
321
232221
131211
m
2
1
The transformation define by those equations is called a linear transformation ( or a linear operator if m=n ). Thus, a linear transformation is defined by equations of the form
mn RRT
mn RRT
The matrix A=[aij] is called the standard matrix for the linear transformation T, and T is called multiplication by A

Example 2A Linear Transformation from R4 to R3
8
3
1
2
0
3
1
0 4 1 5
1 2 1 4
5 1 3 2
8w,3w,1 wyields (5)in ngsubstituti then ),2,0,3,1(),,,(x
if example,For tion.multiplicamatrix by (6) fromor (5) equations
fromdorectly computed becan ),,,(xpoint a of image The
(6)
0 4 1 5
1 2 1 4
5 1 3 2
as formmatrix in expressed becan
45
(5) 24
532
equations by the defined n nsformatiolinear tra The
3
2
1
3214321
4321
4
3
2
1
3
2
1
3213
43212
43211
34
w
w
w
xxx
xxx
x
x
x
x
w
w
w
xxxw
xxxxw
xxxxw
RT:R
0 4 1 5
1 2 1 4
5 1 3 2
is Tfor matrix standard the
A

Some Notational Matters We denote the linear transformation by
Thus,
The vector is expressed as a column matrix.
We will denote the standard matrix for T by the symbol [T].
Occasionally, the two notations for standard matrix will be mixed, in which case we have the relationship
mn RRT mnA RRT
xx ATA )(
xx ][)( TT
ATA ][
x

Example 3Zero Transformation from Rn to Rm
0.by denoted isation transformzero theSometimes
. to fromation transformzero the call We.in vector
zero theinto in or every vect maps zeroby tion multiplica so
0)(
in or every vectfor
then,in vector zero theis andmatrix zero theis 0 If
0
0
mnm
n
n
n
RRTR
R
T
R
Rnm
0xx
x
0

Example 4Identity Operator on Rn
nI
n
n
RT
RI
IT
Rnn
on operator identity the call We
itself. into in or every vect maps by tion multiplica so
)(
in or every vectfor then identity, theis I If
I xxx
x

Reflection Operators In general, operators on R2 and R3 that
map each vector into its symmetric image about some line or plane are called reflection operators. Such operators are linear.
Tables 2 and 3 list some of the common reflection operators

Table 2

Table 3

Projection Operators In general, a projection operator (or
more precisely an orthogonal projection operator ) on R2 or R3 is any operator that maps each vector into its orthogonal projection on a line or plane through the origin. It can be shown that operators are linear.
Some of the basic projection operators on R2 and R3 are listed in Tables 4 and 5.

Table 4

Table 5

Rotation Operators (1/2) An operator that rotate
each vector in R2 through a fixed angle is called a rotation operator on R2. Table 6 gives formulas for the rotation operator on R2.
Consider the rotation operator that rotates each vector counterclockwise through a fixed angle . To find equations relating and ,let be the positive -axis to ,and let r be the common length of and (figure 4.2.4)
xx
x
w
(x)w T x

Rotation Operators (2/2)
1 2
Then from basic trigonometry
cos sin (14)
cos sin (15)
Using trigonom
x r , y r
w r (θ ), w r (θ )
1
2
1
etrix identities on (15) yields,
cos cos sin sin
sin cos cos sin
and substituting (14) yields cos sin (16)
w r θ r θ
w r θ r θ
w x θ y θ
2 sin cos
The standard matrix for
cos sin[ ]
sin cos
w x θ y θ
T
θ θT
θ θ

Table 6

Example 5Rotation
2
31
2
13
is 1
1
vector theof image theexample,For
23
21
21
23
23 2
1
21 2
3
6 cos 6sin
6sin 6cos is
vector a of image then the,)30(6 of anglean through rotated is in r each vecto If 2
wx
w
x
w
yx
yx
y
x
y
x
y
x
R

A Rotation of Vectors in R3(1/3) A Rotation of Vectors in R3 is usually
described in relation to a ray emanating from the origin, called the axis of rotation. As a vector revolves around the axis of rotation it sweeps out some portion of a cone (figure 4.2.5a). The angle of rotation is described as “clockwise” or “counterclockwise” in relation to a viewpoint that is along the axis of rotation looking toward the origin.
For example, in figure 4.2.5a , angles are positive if they are generated by counterclockwise rotations and negative if they are generated by clockwise.
The most common way of describing a general axis of rotation is to specify a nonzero vector u that runs along the axis of rotation and has its initial point at the origin. The counterclockwise direction for a rotation about its axis can be determined by a “right-hand rule” (Figure 4.2.5 b)
A Rotation of Vectors in R3(2/3) A rotation operator on R3 is a linear operator
that rotates each vector in R3 about some rotation axis through a fixed angle .
In table 7 we have described the rotation operators on R3 whose axes of rotation are positive coordinate axes.

Table 7

A Rotation of Vectors in R3(3/3) We note that the standard matrix for a
counterclockwise rotation through an angle about an axis in R3, which is determined by an arbitrary unit vector that has its initial point at the origin, is
cos)cos1( sin)cos1(c sin)cos1(
sin)cos1(c cos)cos1( sin)cos1(
sin)cos1( sin)cos1( cos)cos1(
2
2
2
cabbac
abbcab
baccaba
),,( cbau

Dilation and Contraction Operators If is a nonnegative scalar, the operator
on R2 or R3 is called a contraction with factor if
and a dilation with factor if .
Table 8 and 9 list the dilation and contraction operators on R2 and R3
10 k 1k
kk
k
k
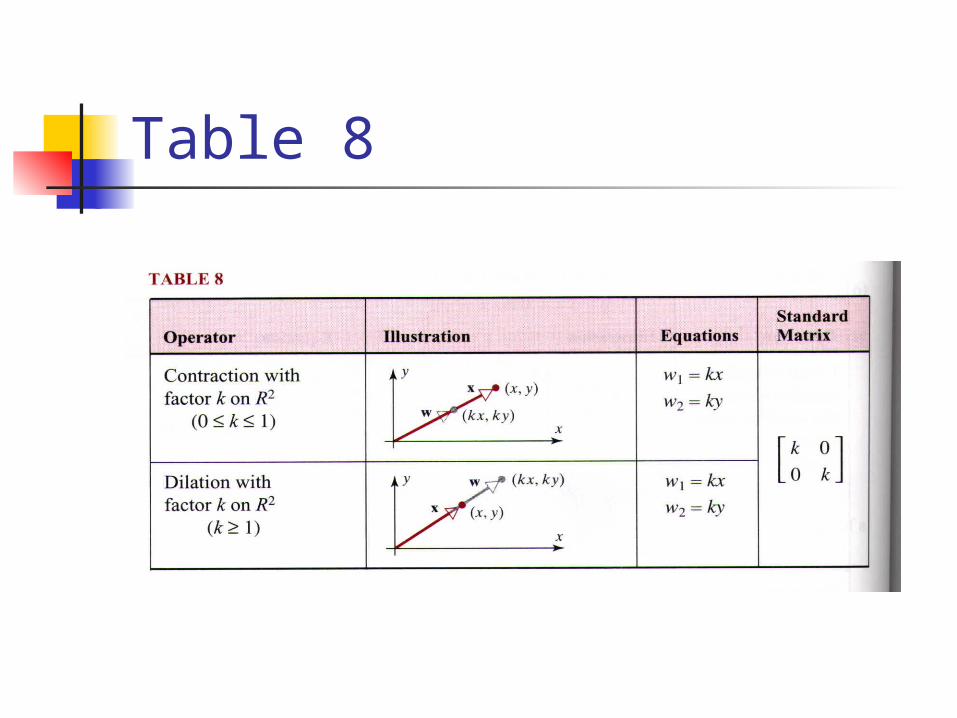
Table 8

Table 9

Compositions of Linear Transformations
(21) ]][[][
:(20) formula of form ealternativan is There
(20)
(19)())(())((
sincelinear is n compositio The
(18) ))(())((
Thus )." circle " (read by denoted
is and with ofn compositio thecalled isation transformThis .
tofromation transforma produces by followed ofn applicatio
theThus, .in vector a iswhich ,))(( computecan onethen
and ,in vector a is which ),( computefirst can one in each
for then ns,nsformatiolinear tra are and If
1212 TTTT
TTT
BAABTTTT
TT
TTTT
TTTT
TTR
RTT
RTT
RTR
RRTRR T
BAAB
ABAB
AB
ABAB
ABAB
ABn
mBA
mAB
kA
n
mkB
knA
)x (x)xx
xx
x
xx

Example 6Composition of Two Rotations(1/2)
Let and be linear operators that rotate vectors through the angle and ,respective. Thus the operation
first rotates through the angle , then rotates through the angle . It follows that the net effect of
is to rotate each vector in R2 through the angle (figure 4.2.7)
221 : RRT 22
2 : RRT
1
2
))((())(( 1212 xx TTTT
1
2
x)(1 xT
21 12 TT

Example 6Composition of Two Rotations(2/2)
][
)cos( )sin(
)sin( )cos(
coscossinsin sincoscossin
)cossinsin(cos sinsincoscos
cos sin
sin cos
cos sin
sin cos]][[
(21).satisfy should matrices These
)cos( )sin(
)sin( )cos(][
cos sin
sin cos][ ,
cos sin
sin cos][
are operatorslinear for these matrices standard theThus,
12
2121
2121
12121212
12121212
11
11
22
2212
2121
212112
22
222
11
111
TT
TT
TT
TT

Example 7Composition Is Not Commutative(1/2)
Let be the reflection operator about the line ,and let be the orthogonal projection on the -axis. Figure 4.2.8 illustrates graphically that and have different effect on a vector . This same conclusion can be reached by showing that the standard matrices for and do not commute:
221 : RRT
222 : RRT
12 TT 21 TT
xy
y
x
1T 2T

Example 7Composition Is Not Commutative(2/2)
1221
1212
2121
so
0 1
0 0
0 1
1 0
0 0
1 0]][[
0 0
1 0
0 0
1 0
0 1
1 0]][[
TTTT
TTTT
TTTT
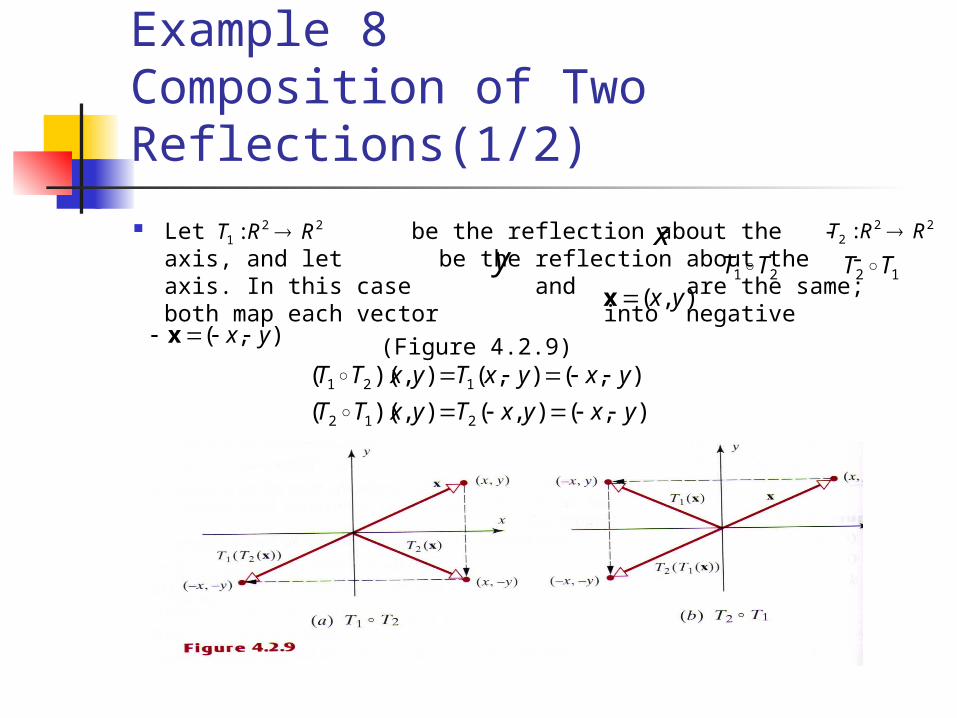
Example 8Composition of Two Reflections(1/2)
Let be the reflection about the -axis, and let be the reflection about the -axis. In this case and are the same; both map each vector into negative
(Figure 4.2.9)
221 : RRT 22
2 : RRT y
x21 TT 12 TT
),( yxx
),( yx x
),(),(),)((
),(),(),)((
212
121
yxyxTyxTT
yxyxTyxTT

Example 8Composition of Two Reflections(2/2)
The equality and can also be deduced by showing that the standard matrices for and commute
The operator on R2 or R3 is called the reflection about the origin. As the computations above show, the standard matrix for this operator on R2 is
21 TT 12 TT
1T 2T
1 0
0 1
1 0
0 1
1 0
0 1]][[][
1 0
0 1
1 0
0 1
1 0
0 1]][[][
1212
2121
TTTT
TTTT
xx )(T
1 0
0 1T
Compositions of Three or More Linear Transformations Compositions can be defined for three or more linear
transformations. For example, consider the linear transformations
We define the composition by
It can be shown that this composition is a linear transformation and that the standard matrix for is related to the standard matrices for , , and by
which is a generalization of (21) . If the standard matrices for , , and are denoted by A, B, and C, respectively, then we also have the following generalization of (20):
mllkkn RRTRRTRRT : ,: ,: 321
mn RRTTT :)( 123
)))(((:)( 123123 xx TTTTTT
]][][[][ 123123 TTTTTT
CBAABC TTTT
123 TTT
1T
1T
2T
3T
3T
2T

Example 9Composition of Three Transformations(1/2)
Find the standard matrix for the linear operator that first rotates a vector counterclockwise about the z -axis through an angle , then reflects the resulting vector about the -plane, and then projects that vector orthogonally onto the -plane.
Solution:The linear transformation T can be expressed as the composition , where T1 is the rotation about the -axis, T2 is the rotation about the -plane, T3 is the rotation about the -plane. From Tables 3,5, and 7 the standard matrices for these linear transformations are
33: RRT
z
yz
xy
123: TTTT yz
xy

Example 9Composition of Three Transformations(2/2)
0 0 0
0 cos sin
0 sin cos
1 0 0
0 cos sin
0 sin cos
1 0 0
0 1 0
0 0 1
0 0 0
0 1 0
0 0 1
][
is that ,[ is Tfor matrix standard the(22) from Thus,
0 0 0
0 1 0
0 0 1
][ ,
1 0 0
0 1 0
0 0 1
][ ,
1 0 0
0 cos sin
0 sin cos
][
123
321
T
]][T][T[TT]
TTT

4.3 Properties of Linear Transformations from Rn to Rm

DefinitionOne-to-One Linear transformations
A linear transformation T=Rn →Rm is said to be one-to-one if T maps distinct vectors (points) in Rn into distinct vectors (points) in Rm

Example 1One-to-One Linear Transformations
In the terminology of the preceding definition, the rotation operator of Figure 4.3.1 is one-to-one, but the orthogonal projection operator of Figure 4.3.2 is not

Theorem 4.3.1Equivalent Statements
If A is an nxn matrix and TA: Rn→Rn is multiplication by A, then the following statements are equivalent.
(a) A is invertible(b) The range of TA is Rn
(c) TA is one-to-one
Example 2Applying Theorem 4.3.1 In Example 1 we observed that the rotation operator T: R2→R2
illustrated in Figure 4.3.1 is one-to-one. It follows from Theorem 4.3.1 that the range of T must be all of R2 and that the standard matrix for T must be invertible. To show that the range of T is all of R2, we must show that every vector w in R2 is the image of some vector x under T. But this is clearly so, since the vector x obtained by rotating w through the angle - maps into w when rotated through the angle . Moreover, from Table 6 of Section 4.2, the standard matrix for T is
Which is invertible, since
cos sin
sin cos][
T
01sincoscos sin
sin cosdet 22

Example 3Applying Theorem 4.3.1 In Example 1 we observed that the projection operator T:
R3→R3 illustrated in Figure 4.3.2 is not one-to-one. It follows from Theorem 4.3.1 that the range of T is not all of R3 and the standard matrix for T is not invertible. To show that the range of T is not all of R3, we must find a vector w in R3 that is not the image of any vector x under T. But any vector w outside of the xy-plane has this property, since all images under T lie in the xy-plane. Moreover, from Table 5 of Section 4.2, the standard matrix for T is
which is not invertible, since det[T]=0
0 0 0
0 1 0
0 0 1
][T

Inverse of a One-to-One Linear Operator(1/2) If TA=Rn →Rn is a one-to-one linear operator, then from
Theorem 4.3.1 the matrix A is invertible. Thus, is itself a linear operator; it is called the inverse of TA. The linear operators TA and cancel the effect of one another in the sense that for all x in Rn
or equivalently,
If w is the image of x under TA, then maps w back into x, since
nn
ARRT 1
1AT
1AT
xxxx
xxxx
IAATT
IAATT
AA
AA
1
1
))((
))((
1
1
IAAAA
IAAAA
TTTT
TTTT
11
11
xxw ))(()( 11 AAATTT

Inverse of a One-to-One Linear Operator(2/2) When a one-to-one linear operator on Rn is
written as T:Rn→Rn, then the inverse of the operator T is denoted by T-1. since the standard matrix for T-1 is the inverse of the standard matrix for T, we have
[T-1]=[T]-1

Example 4Standard Matrix for T-1
Let T: R2→R2 be the operator that rotates each vector in R2 through the angle ;so from Table 6 of Section 4.2
It is evident geometrically that to undo the effect of T one must rotate each vector in R2 through the angle .But this is exactly what the operator T-1 does, since the standard matrix T-1 is
,which is identical to (2) except that is replaced by
cos sin
sin cos][T
)cos( )sin(
)sin( )cos(
cos sin
sin cos ][][ 11
TT

Example 5Finding T-1 (1/2) Show that the linear operator T: R2→R2 defined by the
equations w1=2x1+ x2
w2=3x1+4x2
is one-to-one, and find T-1(w1, w2)
Solution:The matrix form of these equations is
so the standard matrix for T is
2
1
2
1
4 3
1 2
x
x
w
w
4 3
1 2][T

Example 5Finding T-1 (2/2) This matrix is invertible (so T is one-to-one) and the
standard matrix for T-1 is
Thus,
from which we conclude that
5
2
5
35
1
5
4
][][ 11 TT
21
21
2
1
2
11
5
2
5
35
1
5
4
5
2
5
35
1
5
4
][
ww
ww
w
w
w
wT
)5
2
5
3,
5
1
5
4 (),( 212121
1 wwwwwwT

Theorem 4.3.2Properties of Linear Transformations
A T: Rn→Rm is linear if and only if the following relationships hold for all vectors u and v in Rn and every scalar c
(a) T(u+v) = T(u) + T(v)(b) T(cu) = cT(u)

Theorem 4.3.3
If T: Rn→Rm is a linear transformation, and e1, e2, …, en are the standard basis vectors for Rn, then the standard matrix for T is
[T]=[T(e1)|T(e2)|…|T(en)] (6)
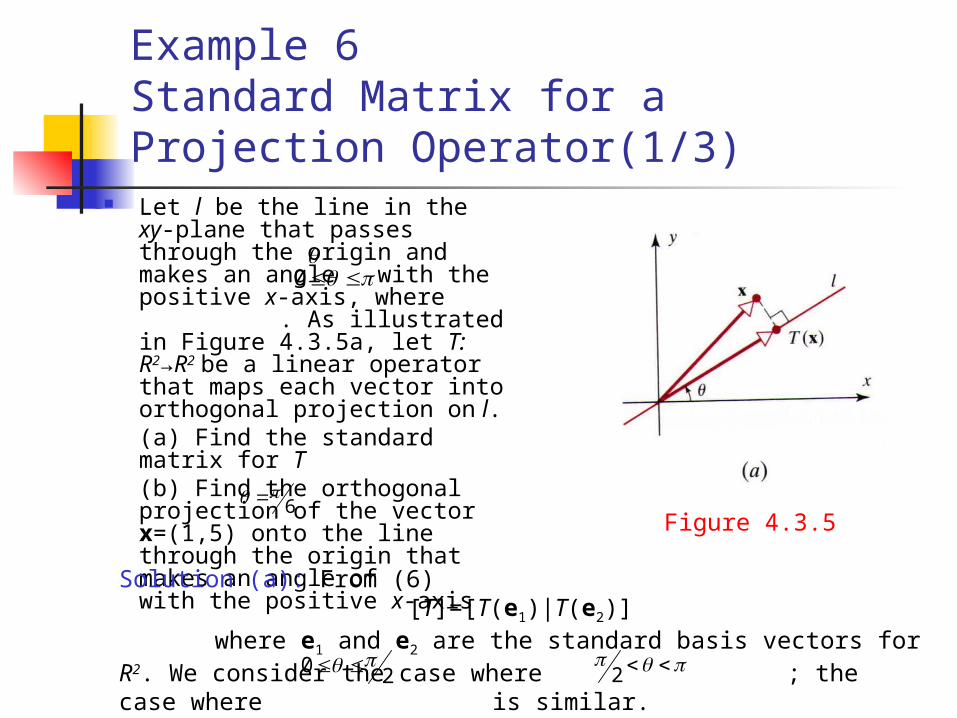
Example 6Standard Matrix for a Projection Operator(1/3)
Let l be the line in the xy-plane that passes through the origin and makes an angle with the positive x-axis, where . As illustrated in Figure 4.3.5a, let T: R2→R2 be a linear operator that maps each vector into orthogonal projection on l.(a) Find the standard matrix for T(b) Find the orthogonal projection of the vector x=(1,5) onto the line through the origin that makes an angle of with the positive x-axis
Solution (a): From (6)[T]=[T(e1)|T(e2)]
where e1 and e2 are the standard basis vectors for R2. We consider the case where ; the case where is similar.
0
6
20 2
Figure 4.3.5

Example 6Standard Matrix for a Projection Operator(2/3)
Referring to Figure 4,3,5b, we have , so
and referring to Figure 4.3.5c, we have so
thus, the standard matrix for T is
cos)( 1 eT
sin)( 2 eT
21
11
( ) cos cos( )
( ) sin sin cos
TT
T
ee
e
22 2
2
sin cos( ) cos( )
( ) sin sin
TT
T
ee
e
2
2
sin cossin
cossin cos T
Example 6Standard Matrix for a Projection Operator(3/3)
Solution (b):Since , it follows from part (a) that the standard matrix for this projection operator is
thus,
or in horizontal notation
236cos and 216sin
41 43
43 43][T
4
53
4
353
5
1
41 43
43 43
5
1T
4
53,
4
3535,1T

Definition If T: Rn→Rn is a linear operator, then a scalar is
called an eigenvalue of T if there is a nonzero x in Rn such that
Those nonzero vectors x that satisfy this equation are called the eigenvectors of T corresponding to
(7) )( xx T

Example 7Eigenvalues of a Linear Operator(1/3)
Let T: R2→R2 be the linear operator that rotates each vector through an angle . It is evident geometrically that unless is a multiple of , then T does not map any nonzero vector x onto the same line as x; consequently, T has no real eigenvalues. But if is a multiple of ,then every nonzero vector x is mapped onto the same line as x, so every nonzero vector is an eigenvector of T. Let us verify these geometric observations algebraically. The standard matrix for T is
As discussed in Section 2.3, the eigenvalues of this matrix are the solutions of the character equation
cos sin
sin cos
A
cos sin
sin cos)det(
AI

Example 7Eigenvalues of a Linear Operator(2/3)
That is,
But if is not a multiple of , then , so this equation has no real solution for and consequently A has no real eigenvectors. If is a multiple of , then and either or , depending on the particular multiple of .In the case where and ,the characteristic equation (8) becomes , so
is the only eigenvalue of A. In the case the matrix A is
Thus, for all x in R2
0sin)cos( 22
0sin 2
0sin 0sin
1cos
1cos 1cos
0)1( 2 1
1 0
0 1A
xxxx IAT )(

Example 7Eigenvalues of a Linear Operator(3/3)
So T maps every vector to itself, and hence to the same line. In the case where and , the characteristic equation (8) becomes , so that is the only eigenvalue of A. In this case the matrix A is
Thus, for all x in R2 ,
so T maps every vector to its negative, and hence to the same line as x.
0sin 1cos
IA
1 0
0 1
0)1( 2 1
xxxx IAT )(

Example 8 Eigenvalues of a Linear Operator(1/3) Let T: R3→R3 be the orthogonal projection on xy-plane. Vectors
in the xy-plane are mapped into themselves under T, so each nonzero vector in the xy-plane is an eigenvector corresponding to the eigenvalue .Every vector x along the z-axis is mapped into 0 under T, which is on the same line as x, so every nonzero vector on the z-axis is an eigenvector corresponding to theei genvalue . Vectors not in the xy-plane or along the z-axis are mapped into scalar multiples of themselves, so there are no other eigenvectors or eigenvalues.
To verify these geometric observations algebraically, recall from Table 5 of Section 4.3 that the standard matrix for T is
1
0 0 0
0 1 0
0 0 1
A
0

Example 8 Eigenvalues of a Linear Operator(2/3)
The characteristic equation of A is
which has the solutions and anticipated above.As discussed in Section 2.3, the eigenvectors of the matrix A corresponding to an eigenvalue are the nonzero solutions of
If , this system is
0)1(or 0
0 0
0 1 0
0 0 1
)det( 2
AI
1
(9)
0
0
0
0 0
0 1 0
0 0 1
3
2
1
x
x
x
0
0
0
0 0 0
0 1 0
0 0 1
3
2
1
x
x
x
0
0

Example 8 Eigenvalues of a Linear Operator(3/3)
which has the solutions x1=0,x2=0,x3=t (verify), or in matrix form
As anticipated, these are the vectors along the z-axis. If , then system (9) is
which has the solutiona x1=s , x2=t , x3=0 , or in matrix form,
As anticipates, these are vectors in xy-plane
tx
x
x
0
0
3
2
1
03
2
1
t
s
x
x
x
1
0
0
0
1 0 0
0 0 0
0 0 0
3
2
1
x
x
x

Theorem 4.3.4Equivalent Statements If A is an nxn matrix, and if TA: Rn→Rn is multiplication by
A , then the following are equivalent,
(a) A is invertible(b) Ax=0 has only the trivial solution(c) The reduced row-echelon form of A is In
(d) A is expressible as a product of elementary matrices(e) Ax=b is consistent for every nx1 matrix b(f) Ax=b has exactly one solution for every nx1 matrix b(g) (h) The range of TA is Rn
(i) TA is one-to-one
0)det( A


















