CHAPTER: 5 SHIFTED EXPONENTIAL DISTRIBUTION: DIFFERENT …€¦ · SHIFTED EXPONENTIAL...
25
72 CHAPTER: 5 SHIFTED EXPONENTIAL DISTRIBUTION: DIFFERENT METHODS OF ESTIMATION 5.1 INTRODUCTION The distribution of the shifted exponential distribution (SE) is simply the distribution of (X-T) where X is exponentially distributed therefore its pdf and cdf are given respectively by; ( ) [ ] 0 > , T > ; exp ) ( λ λ λ x T x x f − − = (5.1.1) ( ) [ ] 0 > , T > ; exp 1 ) ( λ λ x T x x F − − − = (5.1.2) Therefore, SE distribution has a reliability function, ( ) () ( ) [ ] 0 > , T > ; exp 1 ; ; λ λ λ x T t t F T t R − − = − = (5.1.3) and a hazard function is given by, Therefore, ( ) () () 0 > , ; ; λ λ λ = = t R t f t h (5.1.4) The exponential distribution is most widely used distribution for lifetime data analysis, because of its simplicity and mathematical feasibility. However, in real world, we rarely come across the engineering systems which have constant hazard rate throughout their life duration. Therefore, it seems practical to assume hazard rate as a function of time, which led to the development of alternative model for lifetime data analysis. A number of life time models (like Weibull, gamma, generalized exponential etc.) have been proposed to model life time data that have monotonically increasing or decreasing hazard rate function, though; non-monotonicity of the hazard rate has also been observed
Transcript of CHAPTER: 5 SHIFTED EXPONENTIAL DISTRIBUTION: DIFFERENT …€¦ · SHIFTED EXPONENTIAL...

72
CHAPTER: 5
SHIFTED EXPONENTIAL DISTRIBUTION:
DIFFERENT METHODS OF ESTIMATION
5.1 INTRODUCTION
The distribution of the shifted exponential distribution (SE) is simply the distribution of
(X-T) where X is exponentially distributed therefore its pdf and cdf are given
respectively by;
( )[ ] 0>,T>;exp)( λλλ xTxxf −−= (5.1.1)
( )[ ] 0>,T>;exp1)( λλ xTxxF −−−= (5.1.2)
Therefore, SE distribution has a reliability function,
( ) ( ) ( )[ ] 0>,T>;exp1;; λλλ xTttFTtR −−=−= (5.1.3)
and a hazard function is given by,
Therefore, ( ) ( )( ) 0>,;; λλλ ==tRtfth (5.1.4)
The exponential distribution is most widely used distribution for lifetime data analysis,
because of its simplicity and mathematical feasibility. However, in real world, we rarely
come across the engineering systems which have constant hazard rate throughout their
life duration. Therefore, it seems practical to assume hazard rate as a function of time,
which led to the development of alternative model for lifetime data analysis.
A number of life time models (like Weibull, gamma, generalized exponential etc.) have
been proposed to model life time data that have monotonically increasing or decreasing
hazard rate function, though; non-monotonicity of the hazard rate has also been observed

73
in many situations. For example, in the course of the study of mortality associated with
some of the diseases, the hazard rate initially increases with time and reaches after a peak
after some finite period of times and then decline slowly (Singh et al., 2012). Several
researchers have considered Bayesian prediction problems for the shifted exponential
distribution. Dunsmore (1974) and Evans and Nigam (1980) discussed Bayesian
prediction of future observations based on type II censored sample. Madi and Tsui (1990)
derived a class of smooth estimators. Madi and Tom (1996) addressed the problem of
estimating the scale parameter and the parametric function and proposed Bayesian
estimators which are compared using Monte Carlo simulation technique.
On the basis of a doubly censored random sample Madi and Raqab (2003) have discussed
failure times drawn from a shifted exponential distribution, also address the problem of
Bayesian prediction of one-sample as well as two-sample problem. Raqab (2004) have
discussed simple approximation to one of prediction likelihood equations and derive
approximate predictors of missing failure times. He computes their mean square
prediction errors by simulation and compares them with the best linear predictors.
Further, presented two real examples to illustrate this method of prediction.
Kao (2010) demonstrates that a location parameter of an exponential distribution
significantly influences normalization of the exponential. Wang, et. al. (2014) proposed
an exact interval estimation procedure through the concept of generalized confidence
interval. Javed, et. al. (2014) represented shifted exponential as a likelihood function and
conjugate inverted gamma prior for making Bayesian inference comparatively robust
against a prior density.
The main aim of this chapter is to study how the different estimators of the unknown
parameter of an SE distribution can behave for different sample sizes and for different
parameter values. Here, we mainly compare the maximum likelihood estimators (MLE's)
with the other estimators such as the estimators based on percentiles (PCE's), least
squares estimators (LSE's), weighted least squares estimators (WLSE's) and the
estimators based on the linear combinations of order statistics (LME's), mainly with

74
respect to their root mean squared errors (RMSE's) using extensive simulation
techniques.
The remaining sections go as follows. In Section 5.2, we briefly discuss the MLE's and
their implementations. In Sections 5.3 to 5.8 we discuss other methods. Simulation
results, discussions, comparisons of different methods using graph and conclusions are
provided in Section 5. 9, 5. 10 and 5.11.
5.2 MAXIMUM LIKELIHOOD ESTIMATORS
In this section the maximum likelihood estimators of SED (λ) are considered, when λ is
unknown. If x1, x2... xn is a random sample from SED (λ) then the likelihood function
L (λ, T) is,
( ) ( ) ( ) ( )[ ]∏∏==
−−===n
i
n
iinn TxxfxxxfxxxL
112121 exp||,.....,,.....,; λλθθθ (5.2.1)
( ) ( )
−−== =
n
ii nTxnLL
1
lnlog λλλ (5.2.2)
On differentiating (5.2.2) with respect to λ and equating to zero,
The normal equation becomes:
0log
1
=+−=∂
∂ =
n
ii nTxnL
λλ (5.2.3)
After solving (5.2.3), we obtained the estimate λ as,
nTx
nn
ii +
=
=1
λ̂ (5.2.4)
Again differenting (5.2.3) with respect to λ, we have
22
2 log
λλnL −=
∂∂
Therefore, ( )nLE
V2
2
2 log
1ˆ λ
λ
λ =
∂
∂−= (5.2.5)

75
And T̂ is the smallest order statistics (i.e. nxT :1ˆ = ). Here, ( )T̂V is negative so we
define smallest order statistics for ( )T̂V , we define pdf of T = x(1), therefore we get,
( )( ) ( )[ ] ( ) ( ) TxenxfxFnxf Txnn
x >=−= −−− ,1 1
1
λλ
( ) ( ) ( ) ( ) ( )
−−
−
==== ∞ −∞−∞
−−∞
T
xn
T
xnTn
T
Txn
Tx dx
ne
nxeendxexndxxxfxE
λλλλμ
λλλλ 11
'1 (5.2.7)
Solving (5.2.7), we have, ( )λ
μn
TxE 1'1 +== (5.2.7 A)
( ) ( ) ( ) ( ) ( )
−−
−
==== ∞ −∞−∞
−−∞
T
xn
T
xnTn
T
Txn
Tx dx
nex
nexendxenxdxxfxxE
λλλλμ
λλλλ 2
22
122'
2 (5.2.8)
Solving (5.2.8) we have, ( )22
22'2
22
λλμ
nnTTxE ++== (5.2.8 A)
Substituting the values of (5.2.7 A) and (5.2.8A), in ( )2'1
'2 μμ − we have
222
2
222
2
1122 σλλλλ
μ ==
+−
++=
nnT
nnTT , therefore,
22
1)ˆ(
nTV
λ= (5.2.9)
In this method one can solve (5.2.4), (5.2.5) and (5.2.9) so as to get Maximum Likelihood
Estimates and root mean square error of parameters λ and T by using extensive
simulation technique.
5.3. ESTIMATION OF RELIABILITY
In statistics, reliability is a very important concept that determines the precision of
measurements. Statistical reliability determines whether or not the experiment is
reproducible
( )[ ] ( )[ ]TtTttFtR −−=−−+−=−= λλ expexp11)(1)( (5.3.1)
Differentiate (5.3.1) with respect to λ and squaring both sides,
( )( ) ( ){ } ( )[ ]{ }22
2
exp TtTttR −−−−=
∂∂ λ
λ (5.3.2)

76
Differentiate (5.3.1) with respect to T and squaring both sides,
( )( ) ( )[ ]{ }22
2
exp TtT
tR −−=
∂∂ λλ
(5.3.3)
From section (5.2), we have ;1
)ˆ(;)ˆ(22
2
nTV
nV
λλλ ==
Variance of estimate of reliability, ( )tR ˆ can be obtained from,
( )( ) )ˆ,ˆcov()()(
2)ˆ()(
)ˆ( )(
ˆ22
TTtRtRTV
TtRVtRtRV λ
λλ
λ
∂∂
∂∂+
∂∂+
∂∂= (5.3.4)
Now, Substituting the values of ( )λ,ˆ' tR ( )TtR ,ˆ' , ( )λ̂V and ( )TV ˆ from (5.3.2), (5.3.3)
and (5.2) in (5.3.4) ( )[ ]tRV ˆ is obtained as,
( )( ) ( )( )[ ] ( )
+−−−=
2
222 1
expˆn
ntTTxtRV λλ as 0)ˆ,ˆ( =TCOV λ (5.3.5)
In this method one can solve (5.3.1) and (5.3.5) so as to get estimate of reliability and
root mean square error of reliability by using extensive simulation technique.
5.4 ESTIMATION OF HAZARD RATE
The hazard rate function h(t), also known as the force of mortality or the failure rate, is
defined as the ratio of the density function and the survival function. That is,
( )1)( =
∂∂
=λ
λ thth (5.4.1)
Variance of estimate of hazard rate, ( )th ˆ can be obtained from,
( )( ) ( ) ( )λλ
ˆˆ2
VththV
∂∂=
(5.4.2)
Now, Substituting the values of ( )th ˆ' and ( )λ̂V , from (5.4.1) and (5.2.5) in (5.4.3)
( )( )thV ˆ is obtained as, ( )( )n
thV2
ˆ λ=
(5.4.3)
In this method one can solve (5.4.1) and (5.4.3) so as to get estimates hazard rate and root
mean square error of hazard rate by using extensive simulation technique.

77
5.5 METHOD OF MOMENT ESTIMATORS
In this section we provide the method of moment estimators (MME's) of the parameters
of SE distribution. If X follows SE (λ, T), then
( ) 1>;1 λλ
μ +== TxE and ( ) 2>;1
22 λ
λσ == xV (5.5.1)
Similarly, the mean and variance of the random sample x1, x2... xn from SE distribution
are, =
=n
i
i
nxX
1
and ( )
= −−
=n
i
i
nxx
S1
22
1 (5.5.2)
Therefore, equating the mean and variance of the sample with the mean and
variance of the population, from (5.5.1) and (5.5.2), we obtain, 1>;1ˆ λλ
−= XTMME (5.5.3)
From (5.5.1), we obtain, 1>;1ˆ σσ
λ =MME (5.5.4)
Then, the MME’s of λ and T, say, MMEλ̂ and MMET̂ respectively, can be obtained by
solving the two equations (5.5.3) and (5.5.4). Moreover one can solve equation (5.5.3)
and (5.5.4) so as to get moment estimates and root mean square error moment of
parameters λ and T by using extensive simulation technique.
5.6 ESTIMATORS BASED ON PERCENTILES
If the data comes from a distribution function which has a closed form, then it is quite
natural to estimate the unknown parameters by fitting a straight line to the theoretical
points obtained from the distribution function and the sample percentile points. This
method was originally explored by Kao (1958, 1959) and it has been used quite
successfully for Weibull distribution and for the generalized exponential distribution [see,
Murthy et al. (2004) and Gupta and Kundu (2001). In case of a SE distribution, it is
possible to use the same concept to obtain the estimator of λ based on the percentiles,
because of the structure of its distribution function.
( )[ ] 0>,T>;exp1)( λλ xTxxF −−−=

78
( ) ( )( )[ ]{ }TxTxF ii −−−= λλ exp1ln),;(ln (5.6.1)
Let X (i) denotes the i-th order statistic, i.e., X (1) < X (2) <.......... < X (n). If pi denotes some
estimate of F(x (i); λ, T), then the estimate of λ and T can be obtained by minimizing,
( ) ( )( )( )[ ]{ }=
−−−−=n
iii Txpf
1
2exp1lnln λ
(5.6.2)
with respect to λ and T . We notice that (5.6.2) is a non-linear function of x (i). It is
possible to use some non-linear regression techniques to estimate λ and T. We call these
estimators as percentile estimators (PCE's). Several estimators of pi can be used here
[see, Murthy et al. (2004)]. In this chapter, we mainly consider 1+
=n
ipi , which the
expected value of ( )( )TxF i ,,λ . Then the estimator of λ and T can be obtained by
minimizing (5.6.2) with respect to λ and T. The percentile estimator of λ and T, say,
PCEλ̂ and PCET̂ can be obtained as the solution of the non-linear equation;
Differentiating (5.6.2) with respect to λ, and equating to zero, we have non- linear
equation for x (i) and is given by,
( ) ( )( )[ ][ ][ ] ( )( ) ( )( )[ ] ( )( )( )[ ] 0exp1expexp1lnln2 1
1
=−−−−−−−−−−−=∂∂ −
= TxTxTxTxpf
iii
n
iii λλλ
λ
( ) ( )( ) ( )( )[ ]( )( )[ ]
( )( )( )[ ] ( )( ) ( )( )[ ]( )( )[ ] 0
exp1
expexp1ln2
exp1
expln2,
11
=−−−
−−−−−−+
−−−−−−
−=∂∂
==
n
i i
iiin
i i
iii
TxTxTxTx
TxTxTxpfOr
λλλ
λλ
λ
(5.6.3)
Again differentiating (5.6.3) with respect to λ, we get second non-linear equation for x (i)
is given by, where,
( )λλλλλλ ∂
∂+∂∂−=+−
∂∂=
∂∂
∂∂=
∂∂ BABAff
22222
2
(5.6.3A)
Let,
and
( ) ( )( ) ( )( )[ ]( )( )[ ]
= −−−−−−
−=n
i i
iii
TxTxTxp
A1 exp1
expln2
λλ

79
( )( )[ ][ ] ( )( ) ( )( )[ ]( )( )[ ]
= −−−−−−−−−
=n
i i
iii
TxTxTxTx
B1 exp1
expexp1ln2
λλλ
Again, let,
( )( )[ ] ( ) ( )( ) ( )( )[ ]TxTxuTxu iii −−−−=∂∂
−−= λλ
λ expexp
Since,
( ) ( )( )( )
( ) ( )( ) ( )
( )== −
∂∂−−
∂∂−−
−=∂∂
−
−−=
n
i
iin
i
ii
u
uuuuTxpA
uuTxp
A1
21 1
01ln
21
ln2
λλλ
(5.6.4)
Solving (5.6.4) by substituting values of u andλ∂
∂u, we get
( ) ( )( ) ( )( )[ ]( )( )[ ]{ }
= −−−−−−
=∂∂ n
i i
iii
TxTxTxpA
12
2
exp1
expln2
λλ
λ (5.6.5)
Since,
( ) ( )( ) ( )( ) ( ) ( ) ( ) ( )
[ ]=
−
= −
∂∂−−−
∂∂−−+
∂∂−−−
=∂∂
−
−−=
n
i
in
i
i
u
uuuuuuuuuTxB
uuTxu
B1
2
1
1 1
01ln011ln1
21
1ln2
λλλλ
(5.6.6)
Solving (5.6.6) by substituting values of u andλ∂
∂u, we get
( )( ) ( )( )[ ] ( )( )( )[ ] ( )( )[ ]{ }( )( )[ ]{ }
= −−−
−−−−−−−−−−=
∂∂ n
i i
iiii
Tx
TxTxTxTxB1
2
2
exp1
expexp1lnexp2
λλλλ
λ (5.6.7)
On putting values of λ∂
∂A and
λ∂∂B
, we have,

80
( ) ( )( ) ( )( )[ ]( )( )[ ]{ }
= −−−−−−
=∂∂ n
i i
iii
TxTxTxpf
12
2
2
2
exp1
expln2
λλ
λ
( )( ) ( )( )[ ] ( )( )[ ]{ } ( )( )[ ]{ }( )( )[ ]{ }
= −−−
−−−−−−−−−−
n
i i
iiii
TxTxTxTxTx
12
2
exp1
expexp1lnexp2
λλλλ
(5.6.8)
Differentiating (5.6.2) with respect to T, and equating to zero, we have non- linear
equation for x (i) and is given by,
( ) ( )( )[ ]{ }{ } ( )( )[ ] ( )( )[ ]{ } 0exp1expexp1lnln2 1
1
=−−−−−−−−−=∂∂ −
= TxTxTxp
Tf
ii
n
iii λλλλ
Or,
( ) ( )( )[ ]( )( )[ ]{ }
( )( )[ ]{ } ( )( )[ ]( )( )[ ]{ } 0
exp1
expexp1ln2
exp1
expln2
11
=−−−
−−−−−−
−−−−−
=∂∂
==
n
i i
iin
i i
ii
TxTxTx
TxTxp
Tf
λλλ
λλ
(5.6.9)
Again differentiating (5.6.9) with respect to T, we get second order non-linear equation
for x (i) and is given by, where
( )TB
TABA
TTf
TTf
∂∂−
∂∂=−
∂∂=
∂∂
∂∂=
∂∂
22222
2
(5.6.9A)
( ) ( )( )[ ]( )( )[ ]{ }
= −−−−−
=n
i i
ii
TxTxp
A1 exp1
expln2
λλ
λ and ( )( )[ ]{ } ( )( )[ ]
( )( )[ ]{ }= −−−
−−−−−=
n
i i
ii
TxTxTx
B1 exp1
expexp1ln2
λλλ
λ
Let, ( )( )[ ] ( )( )[ ]TxTuTxu ii −−=
∂∂
−−= λλλ expexp ; Since,
( ) ( ) ( )
( )== −
∂∂−−
∂∂−
=∂∂
−
=n
i
in
i
i
uTuu
Tuup
TA
uup
A1
21 1
01ln
21
ln2 λλ
(5.6.10)
Solving (5.6.10) by substituting values of u andTu
∂∂
, we get
( ) ( )( )[ ]( )( )[ ]{ }
= −−−
−−=
∂∂ n
i i
ii
Tx
TxpTA
12
2
exp1
expln2
λλ
λ (5.6.11)

81
Since,
( )( ) ( ) ( ) ( )
[ ]=
−
= −
∂∂−−−
∂∂−−+
∂∂−−
=∂∂
−−=
n
i
n
i uTuuu
Tuuu
Tuuu
TB
uuuB
12
1
1 1
01ln011ln1
21
1ln2 λλ
(5.6.12)
Solving (5.6.12) by substituting values of u andTu
∂∂
, we get
( )( )[ ] ( )( )( )[ ] ( )( )[ ]{ }( )( )[ ]{ }
= −−−
−−−−−−−−=
∂∂ n
i i
iii
Tx
TxTxTxTB
12
2
exp1
expexp1lnexp2
λλλλ
λ (5.6.13)
On putting values of TA
∂∂
andTB
∂∂
, we have,
( ) ( )( )[ ]( )( )[ ]{ }
( )( )[ ] ( )( )[ ][ ] ( )( )[ ]{ }( )( )[ ]{ }
=
=
−−−
−−−−−−−−
−−−−
−−=
∂∂
n
i i
iii
n
i i
ii
TxTxTxTx
TxTxp
Tf
12
2
12
22
2
exp1
expexp1lnexp2
exp1
expln2
λλλλ
λ
λλ
λ
(5.6.14)
Again differentiating (5.6.9) with respect to λ, we get second order non-linear equation
and is given by, where,
( )λλλλλ ∂
∂−∂∂=−
∂∂=
∂∂
∂∂=
∂∂∂ BABA
Tf
Tf
22222
(5.6.14A)
( ) ( )( )[ ]( )( )[ ]{ }
= −−−−−
=n
i i
ii
TxTxp
A1 exp1
expln2
λλλ
and ( )( )[ ][ ] ( )( )[ ]
( )( )[ ]{ }= −−−
−−−−−=
n
i i
ii
TxTxTx
B1 exp1
expexp1ln2
λλλλ
Let, ( )( )[ ] ( ) ( )( ) ( )( )[ ]TxTxuTxu iii −−−−=∂∂
−−= λλ
λ expexp
( ) ( )
( )== −
∂∂−−
+
∂∂
=∂∂
−
=n
i
in
i
i
u
uuuupA
uup
A1
21 1
0ln
21
ln2
λλ
λλ
λλ
(5.6.15)
Solving (5.6.15) by substituting values of u andλ∂
∂u, we get
( ) ( )( )[ ] ( )( ) ( )( )[ ]{ }( )( )[ ]{ }
= −−−
−−−+−−−−=
∂∂ n
i i
iiii
Tx
TxTxTxpA1
2exp1
exp1expln2
λλλλ
λ (5.6.16)

82
Since,
( )[ ]
( ) ( ) ( ) ( )
( )
[ ]=
−
= −
∂∂−−−
−+
∂∂−−+
∂∂−−
=∂∂
−−=
n
i
n
i u
uuu
uuuuuuuu
Bu
uuB1
2
1
1 1
01ln
1ln011ln1
21
1ln2
λλ
λλ
λλ
λλ
(5.6.17)
Solving (5.6.17) by substituting values of u andλ∂
∂u, so as to get
( )( )[ ] ( )( ) ( )( )[ ]( )( )[ ][ ] ( )( )[ ] ( )( ){ }
( )( )[ ]{ }= −−−
−−−−−−−−
+−−−−−−
=∂∂ n
i i
iii
iii
Tx
TxTxTxTxTx
TxB
12exp1
exp1exp1ln
expexp
2λ
λλλλλ
λ
λ
(5.6.18)
On putting values of TA
∂∂
andTB
∂∂
, we have,
( ) ( )( )[ ] ( )( ) ( )( )[ ]{ }( )( )[ ]{ } −
−−−−−−+−−−−
=∂∂
∂ =
n
i i
iiii
TxTxTxTxp
Tf
12
2
exp1
exp1expln2
λλλλ
λ
( )( )[ ] ( )( ) ( )( )[ ] ( )( )[ ][ ]( )( )[ ] ( )( ){ }
( )( )[ ]{ }= −−−
−−−−−
−−−+−−−−−−
n
i i
ii
iiii
Tx
TxTxTxTxTx
Tx
12exp1
exp1
exp1lnexpexp
2λ
λλλλλ
λ
(5.6.19)
Then, the PCE’s of λ and T, say, PCEλ̂ and PCET̂ respectively, can be obtained by
solving the non linear equations (5.6.8), (5.6.14) and (5.6.19). One can use Newton-
Raphson method to solve the non linear equations (5.6.8), (5.6.14) and (5.6.19).
Moreover one can find percentile estimates and root mean square error estimates of
parameters λ and T by using extensive simulation technique.

83
5.7 LEAST SQUARES AND WEIGHTED LEAST SQUARES ESTIMATORS
In this section, we provide the regression based method estimators of the unknown
parameter, which was originally suggested by Swain, et al. (1988) to estimate the
parameters of Beta distributions. The method can be described as follows: Suppose Y1 ,Y2
,...,Yn is a random sample of size n from a distribution function G( . ) and Y(1) < Y(2) <.....
< Y(n) denotes the order statistics of the observed sample. It is well known that,
( )( )[ ]1+
=n
iyGE i and ( )( )[ ] ( )( ) ( )
.,.......,3,2,1;21
12
ninn
iniyGV i =++
+−=
[see, Johnson, et al. (1995)]. Using the expectations and the variances, two variants of the
least squares methods can be used.
METHOD-5.7.1 LEAST SQUARES ESTIMATORS
Obtain the estimators by minimizing,
( )( )[ ]2
1 1=
+−=
n
ii n
iyGP (5.7.1)
with respect to the unknown parameter. Therefore, in case of SE distribution the least
squares estimator of λ and T, say, LSEλ̂ and LSET̂ can be obtained by minimizing,
( )( )[ ]{ }2
1 1exp1
=
+−−−−=
n
ii n
iTxP λ (5.7.2)
with respect to λ and T .
Differentiating (5.7.2) with respect to λ, and equating to zero, we have non- linear
equation for x (i) and is given by,
( )( )[ ]{ } ( )( ) ( )( )[ ] 0exp1
exp121
=−−−
+−−−−=
∂∂
=
TxTxn
iTxPii
n
ii λλ
λ (5.7.3)
Let,
( )( )[ ] ( ) ( )( ) ( )( )[ ]TxTxuTxu iii −−−−=
∂∂
−−= λλ
λ expexp
Then (5.7.3), becomes,

84
( )( )uTxn
iuPi
n
i−
+−−=
∂∂
=1 112
λ (5.7.4)
Now differentiating (5.7.4) with respect to λ, we have,
( )( )
λλ ∂∂−
+−−=
∂∂
=
uTxn
iuPi
n
i 12
2
1212
(5.7.5)
Solving (5.7.5) by substituting values of u andλ∂
∂u, we have,
( )( )[ ] ( )( )[ ] ( )( )[ ]=
++−−+−−−−=
∂∂ n
iiii n
iTxTxTxP1
2
2
2
1exp21(exp2 λλ
λ (5.7.6)
This is non-linear equation in x (i).
Differentiating (5.7.2) with respect to T, and equating to zero, we have non- linear
equation for x (i) and is given by,
( )( )[ ]{ } ( ) ( )( )[ ] 0exp1
exp121
=−−−
+−−−−=
∂∂
=
Txn
iTxTP
i
n
ii λλλ
( )( )[ ] ( )( )[ ]{ } 01
exp1exp21
=
++−−+−−−=
∂∂
=
n
iii n
iTxTxTP λλ
(5.7.7)
Let,
( )( )[ ] ( )( )[ ]TxTuTxu ii −−=
∂∂
−−= λλλ expexp
=
+++−=
∂∂ n
i niuu
TP
1 112 λ (5.7.8)
Differentiating (5.7.8) with respect to T, we have
=
+++−
∂∂=
∂∂ n
i niu
Tu
TP
1
22
2
1212 λ
(5.7.9)
Solving (5.7.9) by substituting values of u andTu
∂∂
, we have,
( )( )[ ] ( )( )[ ]{ }=
++−−+−−−=
∂∂ n
iii n
iTxTxT
P1
22
2
1exp21exp2 λλλ
(5.7.10)
This is a non-linear equation in x (i)

85
Let,
( )( )[ ] ( ) ( )( ) ( )( )[ ]TxTxuTxu iii −−−−=∂∂
−−= λλ
λ expexp
=
+++−=
∂∂ n
i niuu
TP
1 112 λ
(5.7.11)
Differentiating (5.7.11) with respect to λ,
=
+
+
∂∂+
+
∂∂+
+
∂∂−=
∂∂∂ n
i niuuuuuuu
TP
1
22
122
λλ
λλ
λλ
λ (5.7.12)
Solving (5.7.12) by substituting values of u andλ∂
∂u, we get,
( )( )[ ]( )( ) ( )( ) ( )( )[ ]
( )( )[ ] ( )( )=
++
+−−−−+
−−−−−−−−=
∂∂∂ n
i ii
iii
i
ni
niTxTx
TxTxTxTx
TP
1
2
11exp
exp21
exp2λλ
λλλλ
λ (5.7.13)
This is a non-linear equation in x (i)
Then, the LSE’s of λ and T, say, LSEλ̂ and LSET̂ respectively, can be obtained by
solving the non linear equations (5.7.6) (5.7.10) and (5.7.13). One can use Newton-Raph
son method to solve the non linear equations (5.7.6) (5.7.10) and (5.7.13). Moreover one
can find Least square estimates and root mean square error of parameter λ and T by using
extensive simulation technique.
METHOD-5.7.2: WEIGHTED LEAST SQUARES ESTIMATORS
The weighted least squares estimators can be obtained by minimizing
( )( )[ ]2
1 1=
+−=
n
iii n
iyGwP (5.7.14)
with respect to the unknown parameter, where
( )( )[ ]( ) ( )
( ) .,....,3,2,1;1i-ni
21n=
yGv
1 = w
2
ii nin =
+++
Therefore, in case of shifted exponential distribution the weighted least squares of λ and
T, say, WLSEλ̂ and WLSET̂ can be obtained by minimizing P with respect to λ and T,

86
( )( )[ ]{ }2
1 1exp1,
=
+−−−−=
n
iii n
iTxwPOr λ (5.7.15)
Differentiating (5.7.15) with respect to λ, and equating to zero, we have non- linear
equation for x (i) and is given by,
( )( )[ ]{ } ( )( ) ( )( )[ ] 0exp1
exp121
=−−−
+−−−−=
∂∂
=
TxTxn
iTxwPii
n
iii λλ
λ (5.7.16)
Let,
( )( )[ ] ( ) ( )( ) ( )( )[ ]TxTxuTxu iii −−−−=
∂∂
−−= λλ
λ expexp
Then (5.7.16) becomes
( )( )uTxn
iuwPi
n
ii −
+−−=
∂∂
=1 112
λ (5.7.17)
Now differentiating (5.7.17) with respect to λ, we have
( )( )
λλ ∂∂−
+−−=
∂∂
=
uTxn
iuwPi
n
ii
12
2
121(2
(5.7.18)
Solving (5.7.18) by substituting values of u andλ∂
∂u, we have
( )( )[ ] ( )( )[ ] ( )( )[ ]=
++−−+−−−−=
∂∂ n
iiiii n
iTxTxTxwP1
2
2
2
1exp21(exp2 λλ
λ (5.7.19)
This is non-linear equation in x (i).
Differentiating (5.7.15) with respect to T, and equating to zero, we have non- linear
equation for x (i) and is given by,
( )( )[ ] ( )( )[ ]{ } 01
exp1exp21
=
++−−+−−−=
∂∂
=
n
iiii n
iTxTxwTP λλ
(5.7.20)
Let,
( )( )[ ] ( )( )[ ]TxTuTxu ii −−=
∂∂
−−= λλλ expexp
=
+++−=
∂∂ n
ii n
iuuwTP
1 112 λ (5.7.21)
Differentiating (5.7.21) with respect to T, we have

87
=
+++−
∂∂=
∂∂ n
ii n
iuTuw
TP
1
22
2
1212 λ
(5.7.22)
Solving (5.7.22) by substituting values of u and Tu
∂∂
, we have,
( )( )[ ] ( )( )[ ]{ }=
++−−+−−−=
∂∂ n
iiii n
iTxTxwT
P1
22
2
1exp21exp2 λλλ
(5.7.23)
This is a non-linear equation in x (i)
Let,
( )( )[ ] ( ) ( )( ) ( )( )[ ],expexp TxTxuTxu iii −−−−=∂∂
−−= λλ
λ then
=
+++−=
∂∂ n
ii n
iuuwTP
1 112 λ
(5.7.24)
Differentiating (5.7.24) with respect to λ,
=
+
+
∂∂+
+
∂∂+
+
∂∂−=
∂∂∂ n
ii n
iuuuuuuuwT
P1
22
122
λλ
λλ
λλ
λ (5.7.25)
Solving (5.7.25) by substituting values of u andλ∂
∂u, so as to get,
( )( )[ ]( )( ) ( )( ) ( )( )[ ]
( )( )[ ] ( )( )=
++
+−−−−+
−−−−−−−−=
∂∂∂ n
i ii
iii
ii
ni
niTxTx
TxTxTxTxw
TP
1
2
11exp
exp21
exp2λλ
λλλλ
λ (5.7.26)
This is a non-linear equation in x (i)
In case of SE distribution, if the shape parameter λ and T are unknown, then, the WLSE’s
of λ and T, say, WLSEλ̂ and WLSET̂ respectively, can be obtained by solving the non
linear equations (5.7.19) (5.7.23) and (5.7.26). One can use Newton-Raphson method to
solve the non linear equations (5.7.19) (5.7.23) and (5.7.26). Moreover one can find
Weighted Least square estimates and root mean square error of parameter λ and T by
using extensive simulation technique.

88
5.8 L-MOMENT ESTIMATORS
In this section we propose a method for estimating the unknown parameters of a SE
distribution based on the linear combinations of order statistics, see, for example, David
(1981), Hosking (1990), or David and Nagaraja (2003). The estimators obtained by this
method are popularly known as L-moment estimators (LME's). The LME's are analogous
to the conventional moment estimators but can be estimated by linear combinations of
order statistics, i.e., by L-statistics.
The LME's have theoretical advantages over conventional moments of being more robust
in the presence of outliers in the data. It is observed that LME's are less subject to bias in
estimation and sometimes more accurate in small samples than even the MLE's. First, we
discuss the case how to obtain the LME's when both the parameters of shifted
exponential distribution are unknown. If x(1) < x(2) <.... < x(n) denotes the ordered sample,
then using the same notation as Hosking (1990), First, we discuss the case how to obtain
the LME of shifted exponential distribution when both the parameters are unknown.
L-moments can be expressed as certain linear combinations of probability weighted
moments (PWMS). Let x1, x2,..., xn be identically independently distributed random
variables each with pdf )(xf and cdf )(xF and quantile function )(1 xF − ,then PWMS are
defined as ( ){ } ( )dxxfxFxFr
r −= )(1β ,where r = 0,1,2,3,----. Here we consider only
first two L-moments (λi = 1, 2) associated with x that can be expressed as 01 βλ = and
012 2 ββλ −= . Quantile function ( ) is required to be a strictly increasing monotone
function. This requirement implies that an inverse function ( -1) exists. As such, the cdf
can be expressed as ( ( )) = ( ) = , and subsequently differentiating this cdf with
respect to will yield the parametric form of the pdf for ( ) as ( ( )) =1/ ’( ).
Where ~ (0, 1) with pdf and cdf as 1 and , respectively. For, Shifted Exponential
distribution, ( )( ) ( )( ) TxFxTxxF +−−=−−−=λ
λ 1lnexp1)( ; here ( ) ( ) uuFuqF ==)(

89
and quantile function ( ) ( ) ( ) ( ) ( ) 1;;1ln1 ==+−−== − xfuxFTuxFuqλ
on Substituting )(xF ,
( )xF 1− and ( )xf in ( ){ } ( )dxxfxFxFr
r −= )(1β ,so as to get,
( );
1ln1
0
+−−= duuTu r
r λβ
Let, 01;10;11 ====−=−==− xuxudxduxuxu
( ) ( ) ( )
( ) ( )
−+−−=
−
+−=−−
+−=
1
0
1
0
1
0
0
1
11ln1
1ln
1ln
dxxTdxxx
dxxTxdxxTx
rrr
rr
rr
λβ
λβ
λβ
(5.8.1)
Where, ( ) −−=1
0
1ln1 dxxxA r
λ and ( ) −=
1
0
1 dxxTB r
( ) ;11
0 −= dxxTB r
Let, 01,10;1 ====−==− zxzxdzdxzx
( )11
1
0
1
0
10
1 +
+
−= +
rT
rzTdzzTdzzTB
rrr
(5.8.2)
( ) ;1ln1 1
0 −−= dxxxA r
λ
Let, 01,0;1 ==−∞===== txtxdtedxextnx tt
( ) ( ) ( ) ( ) ( ) ( ) dtetetr
etr
erttedteetA rtrtttttrt ∞−
+
−+−−−−−+
−
+−−=−−=
01432
1
0
132
11
1
λλLet, 00;; ==∞=−∞=−=−= ytytdydtyt
( ) ( ) ( ) dyeyeyr
eyr
eyeydteetA yrryyyytrt ∞
+−−−−−−−−−−
−+−−−−−+
−
+−=−−=
0
!12412312212121
0
132
11
1
λλ
( ) ( )
−+−−−−+
−
+−=
∞ ∞ ∞ ∞+−−−−−−−−−−
0 0 0 0
11241231221212 132
1 dyeydyeyr
dyeyr
dyeyrdyeyA yrryyyy
λ
( ) ( ) ( ) ( )( )
( )( )
+−Γ−+−−−−−+
−Γ
−
−Γ
+
−Γ−
−Γ=
22222 1
21
4
2
33
2
22
2
1
21
rrr
rA r
λ

90
( )( )( )
=Γ+
−+−−−−−+
−
+−Γ= 12;
1
11
16
1
39
1
241
22r
rrrA r
λ (5.8.3)
Adding (5.8.2) and (5.8.3), we have,
( )
1
11
1 1
12
1
++
−
−=
+
=
−
rT
kkr
r
k
k
r λβ
Let, r = 0 then,
( )1;
1
1
1
01
110
1
12
1
0 >+==+
−
−=
=
−
λλ
λβλ
β TTk
kk
k
Let, r = 1 then
( ) ( )
( )
( )
( ) 24
3
24
11
1
22
1
11
1
0
11
1
2
1
11
12
12
2
0
2
12
1
1
TTTTk
k
k
k
+=+
−=+
−
+
−
=+
−
−=
−
=
−
λλλλβ
1;2
11
2
31
24
322 2012 >=−−+=
+−
+=−= λ
λλλλλλββλ TTTT
If x(1) < x(2) <.... < x(n) denotes the ordered sample, then using the same notation as
Hosking (1990), we obtain the first and second sample L-moments as
( ) 1;11
11 >+==
=λ
λ
n
ii Tx
nl
(5.8.4)
( ) ( ) ( ) 1;2
11
1
21
12 >=−−
−=
=
λλ
lxinn
ln
ii
(5.8.5)
and the first two population L-moments are,
( ) 1;1
01 >+=== λλ
βλ TxE (5.8.6)
1;2
12 >= λ
λλ
(5.8.7)
respectively. Now to obtain the LME's of the λ and T unknown parameters, we need to
equate the sample L-moments with the population L-moments. Therefore, the LME's can

91
be obtained by dividing (5.8.4) by (5.8.5). Then, the LME's of λ and T, say, LMEλ̂ and
LMET̂ , respectively, can be obtained by solving the two equations (5.8.4) and (5.8.5).
Moreover one can find L-moment estimates and root mean square error of parameter λ
and T by using extensive simulation technique.
( ) 1;1ˆ1;
111
11 >−=>+==
=
λλ
λλ
lTTxn
l LME
n
ii
(5.8.8)
( ) ( ) ( ) 1;2
1ˆ1;2
11
1
22
21
12 >=>=−−
−=
=
ll
lxinn
l LME
n
ii λλ
λ (5.8.9)
5.9 NUMERICAL EXAMPLES AND DISCUSSIONS:
In this section we present results of some numerical experiments to compare the
performance of the different estimators proposed in the previous sections. We perform
extensive Monte Carlo simulations to compare the performance of the different
estimators, mainly with respect to their biases and root mean squared errors (RMSE's) for
different sample sizes. Note that, we consider sample size n = 10, 20, 30 for fixed λ = 2
when T = 3.We compute the RMSE's of estimators over 1000 replications.
We consider the estimation of λ and T, when λ and T is unknown. The estimates and
root mean square error of MLE, reliability, hazard rate of parameter λ and T can be
obtained from (5.2.4), (5.2.5), (5.2.9), (5.3.1), (5.3.5) (5.4.1) and (5.4.5). Similarly,
method of moment, L-moment estimates and root mean square error of parameters λ and
T can be obtained from (5.5.3), (5.5.4), (5.8.8) and (5.8.9). Moreover, percentile, least
squares, weighted least squares estimates and root mean square error of parameters λ and
T can be obtained by solving (5.6.8), (5.6.13), (5.6.18), (5.7.6), (5.7.10), (5.7.13),
(5.7.19), (5.7.23) and (5.7.26) respectively, with respect to λ and T. The results are
reported in Table 5.9.1 and 5.9.2. It is observed in Table 5.9.2 that most of the estimators
usually over estimate λ and T, as far as PCE, LSE and WLSE concern, which extremely
over estimate λ while for parameter T is quite closer to estimate value of T. The Rmse's
and Biases are also quite close to the MLE, MME and LME. In the context of

92
computational complexities, MLE is easiest to compute. It do not involve any non-linear
equation while solving, where as the PCE, LSE and WLSE involve non-linear equations
and they need to be calculated by some iterative processes.
From Table-5.9.1 it is clear that for increasing values of sample size ( )tR ˆ , ML ( )tR ˆ , and
ML ( ),t̂h ( )th ˆ remains constant, while Rmse ( )tR ˆ and Rmse ( )th ˆ
decreases. For, inverse
exponential distribution, Cumulative density function is defined as
( )[ ] 0>,T>;exp1)( λλ xTxxF −−−= , Therefore,( )( ) TxFx +−−=
λ1ln
, which is
useful for simulation. Table 5.9.1: Simulated values of biases and Rmse's of estimators of t = 5, 2=λ when
3=T .
n ( )tR ˆ ( )th ˆ ( )( )tRML ˆ RMSE’s ( )( )tR ˆ ( )( )thML ˆ RMSE’s ( )( )th ˆ
10 0.01831 2 0.01894 0.02725 2.5121 0.8477
20 0.01831 2 0.01835 0.01795 2.2413 0.5151
30 0.01831 2 0.01805 0.01417 2.1682 0.4029

93
Table 5.9.2: Simulated values of biases and Rmse's of estimators of 2=λ when
3=T .
n Methods λ̂ Bias ( )λ̂ RMSE ( )λ̂ T̂ Bias ( )T̂ RMSE ( )T̂
10 MLE 2.5121 0.5121 0.8477 3.0475 0.0475 0.0471
MOM 2.7272 0.7272 1.4200 3.0589 0.0589 0.1323
PCE 529.5668 527.5668 748.0989 8.7066 5.7066 8.0315
LSE 856.8664 854.8664 3560.683 24.7996 21.7996 183.5345
WLSE 689.6171 687.6171 1138.325 16.8320 13.8320 128.6947
LME 2.3353 0.3353 1.0410 2.9979 -0.0021 0.0999
20 MLE 2.2413 0.2413 0.5151 3.0239 0.0239 0.02412
MOM 2.3128 0.3128 0.8250 3.0334 0.0334 0.0971
PCE 615.2094 613.2094 737.4605 10.005 7.005 10.7279
LSE 1876.512 1874.512 3989.643 6.1703 3.1703 5.1075
WLSE 993.47 991.47 991.47 9.5805 6.5805 6.5805
LME 2.1755 0.1755 0.6326 3.0005 0.0005 0.06603
30 MLE 2.1682 0.1682 0.4029 3.0165 0.0165 0.01619
MOM 2.2484 0.2484 0.6134 3.0217 0.0217 0.08046
PCE 939.6682 937.6682 1191.527 11.8204 8.8204 10.2521
LSE 3744.838 3742.838 3821.506 11.03024 8.0302 8.03397
WLSE 870.5641 868.5641 1158.479 11.0519 8.0519 11.7960
LME 2.1169 0.1169 0.4809 2.9994 -0.0006 0.05273

94
Remark: Here, RMSE’s and Bias are obtained from,
λλ −= ˆBias and .1000
ˆ'
21000
1
=
−=
i
isRMSEλλ
and TTBias −= ˆ and .1000
ˆ'
21000
1
=
−=
i
i TTsRMSE
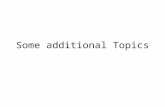
5.10 COMPARISONS OF DIFFERENT METHODS USING GRAPH
For a quick understanding, the relative biases and the relative RMSE’s of the different
estimators of the parameters λ and T is presented in figure-5.10.1, 5.10.2, 5.10.3 and
5.10.4 with sample sizes 10, 20, and 30.
Figure-5.10.1 and 5.10.2 show the average relative biases and RMSE’s of the different
estimator of λ with different sample sizes 10, 20 and 30.
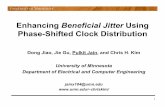
Figure-5.10.3 and 5.10.4 show the average relative biases and RMSE’s of the different
estimator of T with different sample sizes 10, 20 and 30.
0500
1000150020002500300035004000
10 20 30
MLE
MOM
PCE
LSE
WLSE
LME
Figure:5.10.1
n------->
Relative b
aises
0500
10001500200025003000350040004500
10 20 30
MLE
MOM
PCE
LSE
WLSE
LME
Figure:5.10.2
n--------->
Relative
Rm
se's

95
5.11 CONCLUSIONS
In this section we present results of some numerical experiments to compare the
performance of the different estimators proposed in the previous sections. We perform
extensive Monte Carlo simulations to compare the performance of the different
estimators, mainly with respect to their biases and root mean squared errors (RMSE's) for
different sample sizes. Note that, we consider sample size n = 10, 20, 30 for fixed λ = 2
when T = 3. We compute the Rmse's of estimators over 1000 replications.
From Table:5.9.1 we conclude that for unknown shape parameter λ and scale parameter
T, as far as reliability as well as ML reliability is concern, reliability remains same for
different sample size considered. As far as hazard rate is concern, hazard rate remains
same for different sample size considered while ML hazard rate decreases for different
sample size considered. While RMSE’s of reliability and hazard rate decreases for
different sample size considered here.
From Table:5.9.2 comparing all the methods, we conclude that for unknown shape
parameter λ and scale parameter T, LME, MLE and MME perform best for different
values of λ, T and n considered, while LSE do not perform well for different values of λ,
T and n considered. As far as PCE, LSE and WLSE concern, parameter λ is extremely
over estimate while T is under estimate as compare to λ all the time for different values of
n considered. As far as LSE concern, parameter λ is extremely over estimate when
sample size is 30 while T is under estimate as compare to λ all the time for different
values of n considered. As far as PCE, LSE and WLSE are concern, estimate of
-5
0
5
10
15
20
25
10 20 30
MLE
MOM
PCE
LSE
WLSE
LME
Figure:5.10.3
n-------->
Relative b
aises
020406080
100120140160180200
10 20 30
MLE
MOM
PCE
LSE
WLSE
LME
Figure:5.10.4
n-------->R
elative Rm
se's

96
parameter T is similar when sample size is 30 while λ is extremely over estimate. As n
increases, the estimate of λ decreases and its biased increases for PCE, LSE and WLSE
while estimate of λ increases and its biased decreases for MLE, MOM and LME, as far as
estimate of T is concern, estimate of T decreases and its biased increases for MLE, MOM
and LME while for PCE estimate of T increases and its biased decreases. While LSE and
WLSE decreases and its biased increases for sample size 20 again LSE and WLSE
increases and its biased decreases when sample size 30 computationally, the MLE
involve only one dimensional optimization whereas the rest of the estimators involve two
dimensional optimization. From the graph (figure-5.9.1, 5.9.2, 5.9.3 and 5.9.4), we
conclude that for unknown shape parameter λ and scale parameter T, LME, MLE and
MME perform best for different values of λ, T and n considered, while LSE do not
perform well for different values of λ, T and n considered. For a quick understanding, the
relative biases and the relative Rmse’s of the different estimators of the parameters λ and
T is presented in figure-5.9.1, 5.9.2, 5.9.3 and 5.9.4 with sample sizes 10, 20, and 30.