
Analysis of power dissipation in embedded systems using real-time operating systems

Chapter 4Introduction to Real-Time Operating Systems

OutlineIntroductionA Brief History of Operating SystemsDefining an RTOSThe SchedulerObjectsServicesKey Characteristics of an RTOS

IntroductionA real-time operating system (RTOS) is key to many embedded systems todayNot all embedded systems, however, are designed with an RTOS

A Brief History of Operating SystemsIn the early days, developers created software applications that included low-level machine code
To initialize and interact with the hardwareResult in no-portable, bug-prone application
Operating system thus provides the basic software foundation
Facilitate the abstraction of the underlying hardware
A Brief History of Operating Systems (Cont.)
General-purpose operating system (GPOS)UNIX
In the 60s and 70s, multi-user access to expensive mid-sized and mainframe computing systemEventually, ported to all types of machines
Microsoft WindowsDrive the personal-computing era
Real-time operating systemFor post-PC, embedded-computing era
VxWork, uClinux…

Similarities Between a RTOS and GPOS
Some level of multitaskingSoftware and hardware resource managementProvision of underlying OS services to applicationAbstracting the hardware from the software application

Difference Between a RTOS apart GPOS
Better reliability in embedded application contextsThe ability to scale up and down to meeting application needsFaster performanceReduced memory requirementsScheduling policies tailored for real-time embedded systemsSupport for diskless embedded systems by allowing executables to boot and run from ROM or RAMBetter portability to different hardware platforms

Defining an RTOSA program that
Schedules execution in a timely mannerManage system resourcesProvide a consistent foundation for developing application code
Besides, a good RTOS should be scalableTo meeting different requirements for different applications

Defining an RTOS (Cont.)For example, an RTOS is a combination of various modules
KernelProvide minimal logicSchedulingResource-management algorithms
File systemNetwork protocol stacks……
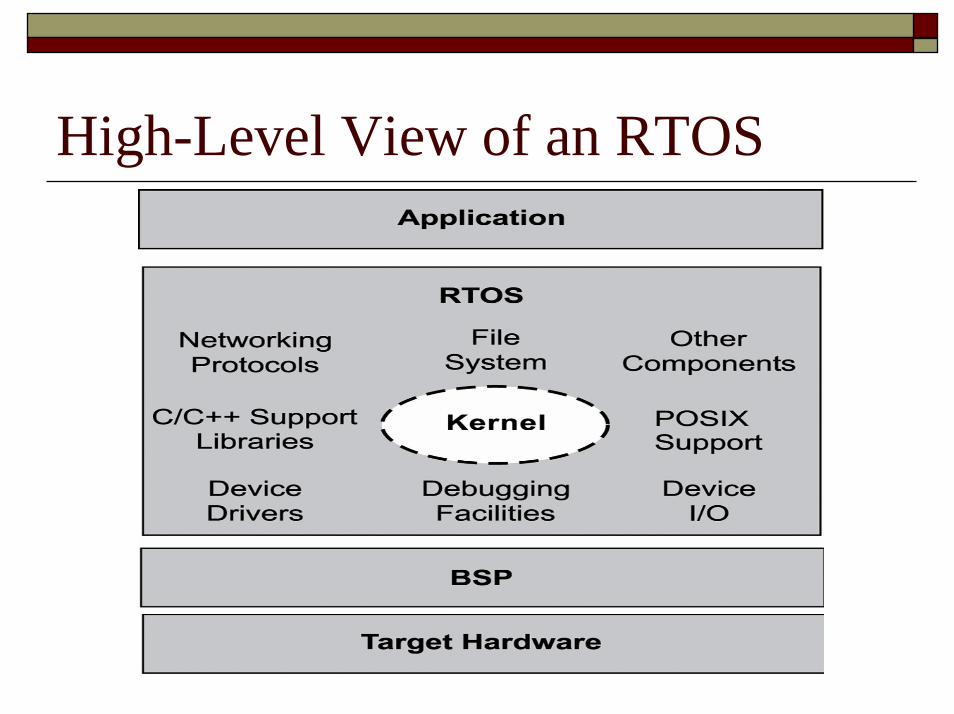
High-Level View of an RTOS

RTOS KernelScheduler
Determine which task executes when
ObjectsSpecial kernel construct that helps developer create applicationsTasks, semaphores, and message queues
ServicesOperations that the kernel performs on an objectTiming, interrupt handling, and resource management
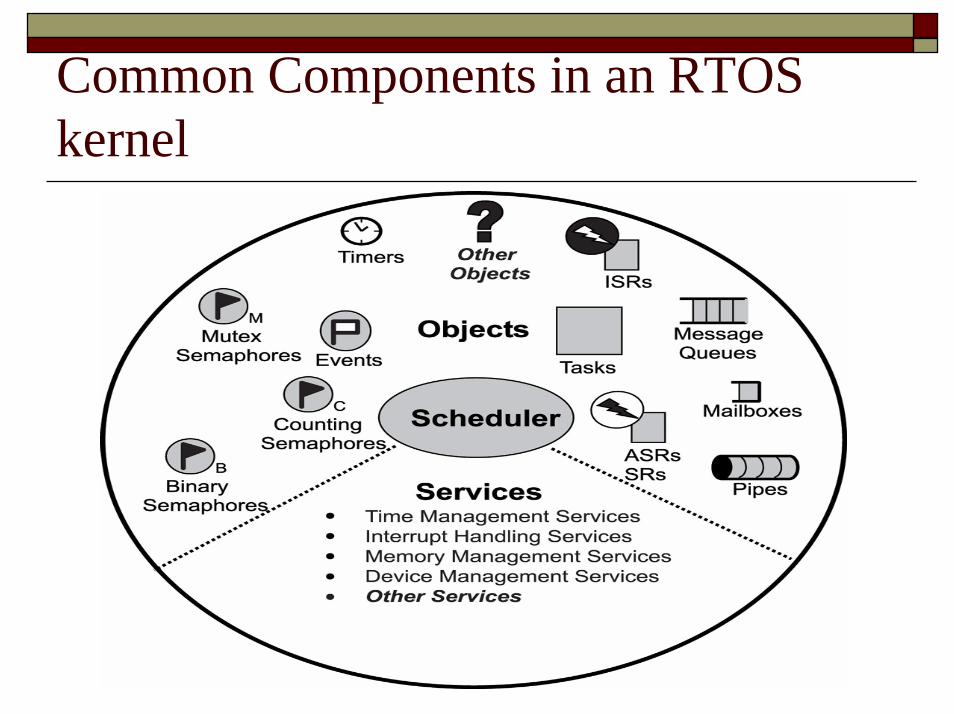
Common Components in an RTOS kernel

The SchedulerAt the heart of every kernelRelated topics
Schedulable entitiesMultitaskingContext switchingDispatcherScheduling algorithms

Schedulable EntitiesA kernel object that can compete for execution time on a systemTask or processes
An independent thread of execution that contains a sequence of independently schedulable instructions

MultitaskingThe ability of the OS to handle multiple activities within set deadlinesMany thread of execution appear to be running concurrently
However, they are actually interleaved executions sequentially

The Context SwitchContext: the state of the CPU registers required for tasks’ running
Occurred when a scheduler switches from one task to anotherWhen a task running, its context is highly dynamic
TCB: Task Control BlockA data structure used by the kernel to maintain task-specific information
The contact of a task is stored in its TCB

Multitasking Using a Context Switch

The Context Switch (Cont.)Steps in context switches
The kernel save task 1’s context information in its TCBIt loads task 2’s context information from its TCB, which becomes the current thread of executionThe context of task 1 is frozen while task 2 executes

The DispatcherThe part of scheduler that performs context switching and changes the flow of executionThree areas that is passed through by the flow of execution (or flow of control)
Through an application taskThrough an ISRThrough the kernel

The Dispatcher (Cont.)A task or ISR makes a system call
Flow of control is passed the kernel to execute one of system routinesWhen leaving the kernel
Dispatch passes control to one of user applicationsNotably, not necessary the original one made the system callDepend on the scheduling algorithm

Scheduling AlgorithmsAlso called scheduling policyTwo common scheduling algorithms
Preemptive priority-based schedulingRound-robin scheduling
Developers can create and define their own scheduling algorithms

Preemptive Priority-Based SchedulingMost real-time kernels use preemptive priority-based scheduling by defaultReal-time kernel generally support 256 priority tasksPriority assignment
Static: assign priority to tasks when createdDynamic: priority can be changed dynamically

Preemptive Priority-Based Scheduling

Round-Robin SchedulingProvide each task an equal share of the CPU execution timePure RR (Round-Robin) scheduling cannot satisfy real-time system requirementsPriority-based scheduling can be augmented with round-robin scheduling
Equal allocation of CPU time for tasks of the same priority

Round-Robin and Preemptive Scheduling
ObjectsSpecial constructs that are the building blocks for application development
TasksSemaphoresMessage Queues

ServicesSets of API calls that can be used to
Perform operations on kernel objectsFacilitate
Timer managementInterrupt handlingDevice I/OMemory management

Key Characteristics of an RTOSReliabilityPredictabilityPerformanceCompactnessScalability
ReliabilityA reliable system
Be available (continue to provide service) and does not fail
Quantified by the download per yearNumber of 9s: the percent of the total time that a system must be available
To determine system reliabilityThe combination of all system elements determines the reliability of a system
Hardware, BSP, RTOS, and application-

Categorizing Highly Available Systems by Allowable Downtime
PredictabilityFor real-time systems, the RTOS needs to be predictable
The completion of operating system calls occurs within known timeframes

PerformanceProcessor’s performance
MIPS: million instructions per secondThrough may used to measure the overall performance of a systemCall-by-call method may be used to measure RTOS performance
Produce timestamps when a system call starts and when it completes

CompactnessTo determine how compact an embedded system be
Application design constraints Cost constraints
For example, a cell phone must be small, portable and low cost
Limit system memoryLimit the size of application and operating system

ScalabilityRTOSes can be used in a wide variety of embedded systems
Be able to scale up or down to meet application-specific requirements
For example, a RTOS may be used in both a cellular phone project and a base station project
Save time and money


















