Chapter 3_Balancing
46
1 1 Universiti Tun Universiti Tun Hussein Onn Malaysia Hussein Onn Malaysia Mechanical Engineering Mechanical Engineering Mechanics of Machine Mechanics of Machine Presented by Tuan Mohd Hafeez bin Tuan Ibrahim
Transcript of Chapter 3_Balancing

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 1/46
11
Universiti TunUniversiti TunHussein Onn MalaysiaHussein Onn Malaysia
Mechanical EngineeringMechanical Engineering
Mechanics of MachineMechanics of Machine
Presented by Tuan Mohd Hafeez bin Tuan
Ibrahim

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 2/46
22
CHAPTER 3CHAPTER 3BALANCINGBALANCING

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 3/46
Balancing
• The balancing of rotating bodies isimportant to avoid shaking forces andshaking moments (vibrations).
• In heavy industrial machines such assteam turbines and electric generators,vibration could cause catastrophic failure.
• ibrations are noisy and uncomfortablenoisy and uncomfortableand !hen a car !heel is out of balance,and !hen a car !heel is out of balance,the ride is "uite unpleasant.the ride is "uite unpleasant.

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 4/46
Type of balancingType of balancing
• Static BalanceStatic Balance # This occurs !hen there# This occurs !hen there
is no resultant centrifugal force and theis no resultant centrifugal force and the
centre of gravity is on the a$is of rotation.centre of gravity is on the a$is of rotation.
• Dynamic BalanceDynamic Balance # This occurs !hen# This occurs !hen
there is no resulting turning moment alongthere is no resulting turning moment along
the a$is.the a$is.

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 5/46
%rinciple of d&'lembert%rinciple of d&'lembert
•• ethod of converting a dynamics problemethod of converting a dynamics problem
into a statics& probleminto a statics& problem
•• *eplace *eplace a’ with a force equal to ‘a’ with a force equal to ‘ma’ma’acting in the opposite direction of acting in the opposite direction of a’a’
++

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 6/46

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 7/46
--

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 8/46
11

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 9/46
1111

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 10/46
1212

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 11/46
1/1/

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 12/46
1010

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 13/46
11

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 14/46
11

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 15/46
1+1+

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 16/46
11

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 17/46
1-1-

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 18/46
22

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 19/46
2121

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 20/46
2222

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 21/46
2/2/

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 22/46
2020

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 23/46
22

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 24/46
22

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 25/46
2+2+

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 26/46
*otor 3alancing4 %lanar*otor 3alancing4 %lanar
• If the system is a simple disc then staticIf the system is a simple disc then static
balance is all that is needed. 5onsider abalance is all that is needed. 5onsider a
thin disc or !heelthin disc or !heel on !hich the centre ofon !hich the centre of
gravity is not the same as the centre ofgravity is not the same as the centre ofrotation.rotation.

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 27/46
If the centre of gravity is distance r from theIf the centre of gravity is distance r from the
centre of rotation then !hen it spins at rad6s,centre of rotation then !hen it spins at rad6s,
centrifugal force is produced. This has a formulacentrifugal force is produced. This has a formula
7here is the mass of the disc. This7here is the mass of the disc. This
is the out of balance force. In order to cancel itis the out of balance force. In order to cancel it
out an e"ual and opposite force is needed. Thisout an e"ual and opposite force is needed. This
isis simply done by adding a mass simply done by adding a mass 22 at a radius r at a radius r 22as sho!n. The t!o force must have the sameas sho!n. The t!o force must have the same
magnitudemagnitude
r M F C 2
.. ω =
r M r M
r M r M
211
2
2
21
2
1
=
= ω ω

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 28/46
• %lacing a suitable mass at a suitable%lacing a suitable mass at a suitableradius moves the centre of gravity to theradius moves the centre of gravity to the
centre of rotation This balance holds truecentre of rotation This balance holds trueat all speeds do!n to 8ero hence it isat all speeds do!n to 8ero hence it isbalanced so long as the products of balanced so long as the products of andandr are e"ual and opposite.r are e"ual and opposite.

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 29/46
/ ass/ ass
• 9o! consider that our disc is out of balance9o! consider that our disc is out of balance
because there arebecause there are three masses attached to it asthree masses attached to it as
sho!n. The / masses are said to be coplanar andsho!n. The / masses are said to be coplanar and
they rotate about a common centre.they rotate about a common centre.2
2
22 r M F ω =
1
2
11 r M F ω =
3
2
33 r M F ω =

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 30/46
*esultant :orce*esultant :orce
• These are vector "uantities and !e canThese are vector "uantities and !e can
add them up to find the resultant force asadd them up to find the resultant force as
sho!nsho!n

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 31/46
EA!PLEEA!PLE 11
• Three masses ', 3 and 5 are placed on aThree masses ', 3 and 5 are placed on abalanced disc as sho!n at radius of 12 mm,balanced disc as sho!n at radius of 12 mm,1mm and mm1mm and mm respectively. The masses arerespectively. The masses are1 kg, . kg and .+ kg respectively. :ind the 0th1 kg, . kg and .+ kg respectively. :ind the 0thmass !hich should be added at a radius of mass !hich should be added at a radius of
mm in order to statically balance the system.mm in order to statically balance the system.

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 32/46
;olution;olution
:irst dra! up a table to calculate the value of r for each mass.:irst dra! up a table to calculate the value of r for each mass.
assass radiusradius r r
' ' 11 1212 1212
33 .. 11
55 .+.+
<< << <<
<<ra! the r polygon to find the value of r for the 0ra! the r polygon to find the value of r for the 0 thth massmass
The resultant is 100./ kg mm and is e"ual to < The mass re"uired isThe resultant is 100./ kg mm and is e"ual to < The mass re"uired is100./6 = 2.0 kg , 2>100./6 = 2.0 kg , 2> anticlock!ise of ' as sho!n.anticlock!ise of ' as sho!n.

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 33/46
EERCI"E #EERCI"E #
:ind the 0 th mass that should be added at a radius of mm in order to:ind the 0 th mass that should be added at a radius of mm in order to
statically balance the system sho!n.statically balance the system sho!n.
ass ' is 1 kg at 1 mm radius.ass ' is 1 kg at 1 mm radius.
ass 3 is 1. kg at + mm radiusass 3 is 1. kg at + mm radius
ass 5 is 2. kg at - mm radiusass 5 is 2. kg at - mm radius
An$wer% &'() *g at #(+,An$wer% &'() *g at #(+, cloc*wi$e fro- Acloc*wi$e fro- A 6calculation and dra!6calculation and dra!

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 34/46
*otor 3alancing4 ulti4planar*otor 3alancing4 ulti4planar
5onsider 2 masses statically balanced as sho!n but5onsider 2 masses statically balanced as sho!n butacting at different places along the a$isacting at different places along the a$is
5onsider 2 masses statically balanced as sho!n but5onsider 2 masses statically balanced as sho!n butacting at different places along the a$isacting at different places along the a$is
:or static balance 'r :or static balance 'r ' ' = 3r = 3r 33

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 35/46
0 mass0 mass
It is clear that even !ith static balance, centrifugal force !ill produceIt is clear that even !ith static balance, centrifugal force !ill produce
a turning moment about the centre of gravity for the system. In thisa turning moment about the centre of gravity for the system. In this
simple case, the problem is solved by adding e"ual andsimple case, the problem is solved by adding e"ual and oppositeopposite
forces at the t!o points as sho!n.forces at the t!o points as sho!n.
5onsider the turning moment due to a single mass.5onsider the turning moment due to a single mass.

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 36/46
The centrifugal force produced is : = The centrifugal force produced is : = ??@[email protected] turning moment about the reference plane = T.. = : $ = The turning moment about the reference plane = T.. = : $ = ??@r$@r$
:or dynamic and static balance !e must !ork out the resultant:or dynamic and static balance !e must !ork out the resultantturning moment and add masses at appropriate points to cancel itturning moment and add masses at appropriate points to cancel itout. The appropriate points !ill be on t!o planes not coplanar !ithout. The appropriate points !ill be on t!o planes not coplanar !ithany of the original masses. This involves dra!ing t!o vectorany of the original masses. This involves dra!ing t!o vector
diagrams and sincediagrams and since ?? is common to all vectors !e can again takeis common to all vectors !e can again take ?? =1 and dra! vectors representing r and r$. This is best=1 and dra! vectors representing r and r$. This is beste$plainede$plained !ith a !orked e$ample.!ith a !orked e$ample.

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 37/46
EA!PLEEA!PLE 22
:ind the mass and the angle at !hich it should be positioned in planes ':ind the mass and the angle at !hich it should be positioned in planes 'and < at a radius of and < at a radius of mm in order to produce complete balance of themm in order to produce complete balance of the
system sho!nsystem sho!n

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 38/46
".L/TI.N".L/TI.N
9ote that the diagram has been dra!n !ith 3 vertical. It is a good idea to al!ays start by making one of9ote that the diagram has been dra!n !ith 3 vertical. It is a good idea to al!ays start by making one ofthe kno!n masses hori8ontal or vertical to make the construction of the vector diagrams easier. 'll anglesthe kno!n masses hori8ontal or vertical to make the construction of the vector diagrams easier. 'll anglesshould be e$pressed in absolute terms.should be e$pressed in absolute terms.
%lane ' is the reference plane. 'll values of $ are measured from plane ' thus making r$ for ' e"ual to%lane ' is the reference plane. 'll values of $ are measured from plane ' thus making r$ for ' e"ual to8ero. It follo!s that it does not appear in the vector diagram. ake up a table as follo!s leaving unkno!ns8ero. It follo!s that it does not appear in the vector diagram. ake up a table as follo!s leaving unkno!nsas symbols.as symbols.
rr rr $$ r$r$
' ' '' '' 33 ++ /+/+ 22 + +
55 22 11 // / /
<< << << /+/+ 22 <22 < 2.2.
8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 39/46
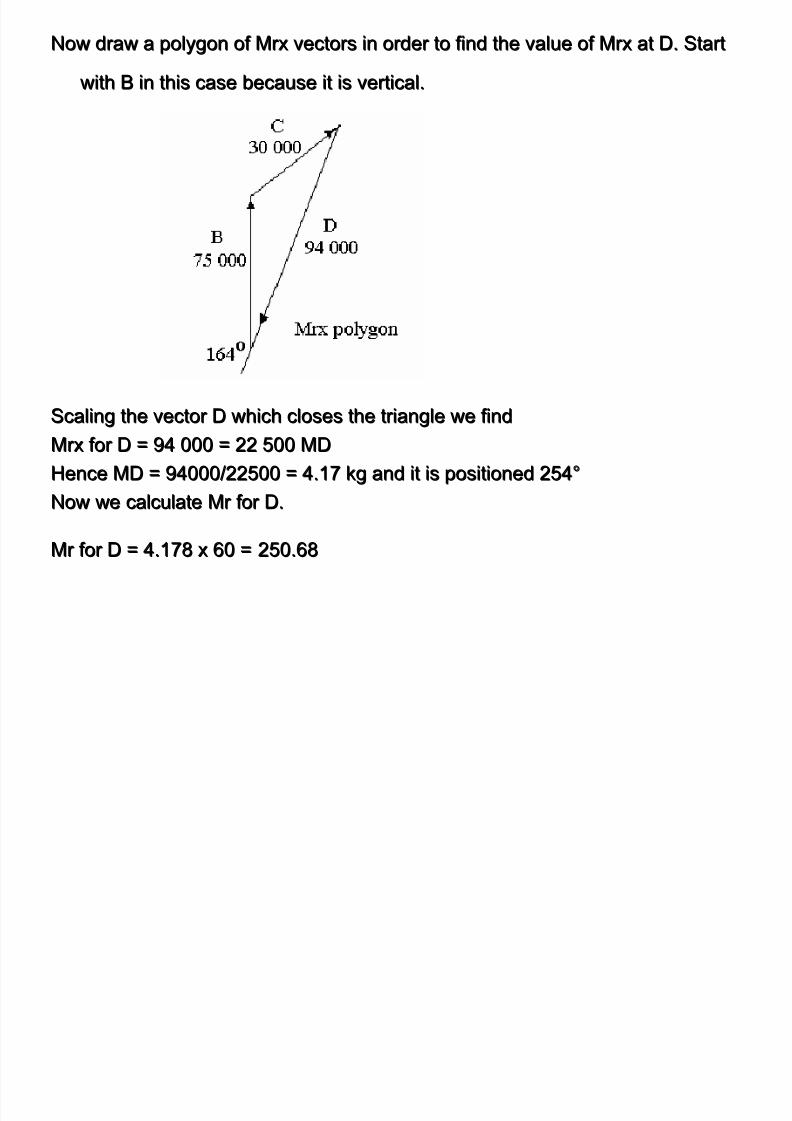
9o! dra! a polygon of r$ vectors in order to find the value of r$ at <. ;tart9o! dra! a polygon of r$ vectors in order to find the value of r$ at <. ;tart
!ith 3 in this case!ith 3 in this case because it is vertical.because it is vertical.
;caling the vector < !hich closes the triangle !e find;caling the vector < !hich closes the triangle !e findr$ for < = -0 = 22 <r$ for < = -0 = 22 <
Aence < = -0622 = 0.1+ kg and it is positioned 20>Aence < = -0622 = 0.1+ kg and it is positioned 20>
9o! !e calculate r for <.9o! !e calculate r for <.
r for < = 0.1+ $ = 2.r for < = 0.1+ $ = 2.
9 t d th l f th l h

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 40/46
9e$t !e dra! the polygon for the r values as sho!n.9e$t !e dra! the polygon for the r values as sho!n.
The vector !hich closes the polygon represents r for point 'The vector !hich closes the polygon represents r for point '
r for ' is 1-.r for ' is 1-.
' = 1- ' = 1-6 = /.2 kg at o to the vertical.' = 1- ' = 1-6 = /.2 kg at o to the vertical.The ans!er is best sho!n !ith an end vie! .The ans!er is best sho!n !ith an end vie! .

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 41/46
EERCI"E )EERCI"E )
1.1. ' shaft has 0 discs ', 3, 5 and < along its length 1 mm apart. ' ' shaft has 0 discs ', 3, 5 and < along its length 1 mm apart. 'mass of . kg is placed on 3 at a radius of 2 mm. ' mass of 2 kg ismass of . kg is placed on 3 at a radius of 2 mm. ' mass of 2 kg is
placed on 5 at a radius of / mm and rotated 12> from the mass on 3.placed on 5 at a radius of / mm and rotated 12> from the mass on 3.
:ind the masses to be placed on ' and < at a radius of 2 mm that !ill:ind the masses to be placed on ' and < at a radius of 2 mm that !ill
produce total balance.produce total balance.
('ns!ers .- kg and 1.2 kg)('ns!ers .- kg and 1.2 kg) calculation 6 dra!calculation 6 dra!
2.The diagram belo! sho!s masses on t!o rotors in planes 3 and2.The diagram belo! sho!s masses on t!o rotors in planes 3 and
5. <etermine the masses to be added on the rotors in planes '5. <etermine the masses to be added on the rotors in planes '
and < at radius 0 mm !hich !ill produce static and dynamicand < at radius 0 mm !hich !ill produce static and dynamic
balance.balance.

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 42/46
( 1.- kg at 1++> and 2.2 kg at 101> )( 1.- kg at 1++> and 2.2 kg at 101> )

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 43/46

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 44/46

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 45/46

8/19/2019 Chapter 3_Balancing
http://slidepdf.com/reader/full/chapter-3balancing 46/46
TA'9B CDETA'9B CDE