CHAPTER 3 SIMULATION OF FOUR QUADRANT ...shodhganga.inflibnet.ac.in/bitstream/10603/25846/8/08...44...
26
44 CHAPTER 3 SIMULATION OF FOUR QUADRANT OPERATION IN THREE PHASE BLDC MOTOR USING MATLAB/SIMULINK 3.1 INTRODUCTION Simulink platform is effective in the simulation and analysis of dynamic systems. With Simulink, experimental models can be easily built from the scratch and existing models can be modified to the user’s needs. Linear and nonlinear systems, modelled in continuous time, sampled time, or a hybrid of the two are supported by Simulink. Systems can also be multirate— having different parts that are sampled or updated at different rates. This chapter presents a Simulink model in MATLAB R2011a to simulate the four quadrant operation of three-phase BLDC motor. This simulation includes the closed loop control of the motor. 3.2 BLOCK DIAGRAM REPRESENTATION OF THE DRIVE SYSTEM The three-phase BLDC motor with built in Hall sensors is chosen for this research work. The Hall sensors are required to detect the rotor position and they have to be fed back into the controller. The reference speed is fed as an input to the controller. Eventually, the controller generates the PWM pulses required to commutate the switches according to its input. The implementation of the proposed drive system is presented in Figure 3.1.
Transcript of CHAPTER 3 SIMULATION OF FOUR QUADRANT ...shodhganga.inflibnet.ac.in/bitstream/10603/25846/8/08...44...

44
CHAPTER 3
SIMULATION OF FOUR QUADRANT OPERATION IN
THREE PHASE BLDC MOTOR USING
MATLAB/SIMULINK
3.1 INTRODUCTION
Simulink platform is effective in the simulation and analysis of
dynamic systems. With Simulink, experimental models can be easily built
from the scratch and existing models can be modified to the user’s needs.
Linear and nonlinear systems, modelled in continuous time, sampled time, or
a hybrid of the two are supported by Simulink. Systems can also be
multirate— having different parts that are sampled or updated at different
rates. This chapter presents a Simulink model in MATLAB R2011a to
simulate the four quadrant operation of three-phase BLDC motor. This
simulation includes the closed loop control of the motor.
3.2 BLOCK DIAGRAM REPRESENTATION OF THE DRIVE
SYSTEM
The three-phase BLDC motor with built in Hall sensors is chosen
for this research work. The Hall sensors are required to detect the rotor
position and they have to be fed back into the controller. The reference speed
is fed as an input to the controller. Eventually, the controller generates the
PWM pulses required to commutate the switches according to its input. The
implementation of the proposed drive system is presented in Figure 3.1.

45
Figure 3.1 Complete Drive System
The three-phase inverter is supplied from a DC source. The inverter
circuit is coupled to the motor using normally closed contacts. During
motoring operation, the PWM pulses provide the appropriate switching
sequence to the inverter.
The switching (relay) circuit is coupled to the BLDC motor.
Whenever the motor is operating in the regenerative mode, the normally open
contacts of the switching circuit get closed. Thereby the generated voltage
gets rectified and the charge gets stored in the chargeable battery.
3.3 SIMULINK MODEL OF BLDC DRIVE
The proposed Simulink model of BLDC drive is shown in Figure
3.2. The controller gets the position of the rotor from the Hall signals and the
actual speed of the motor is also fed as an input. The controller generates the
gate signals as its output, which will be fed to the inverter circuit.

46
Figure 3.2 Simulink Model of Drive System
The different loads to be applied at various instants are also
modelled. The Hall signals, PWM pulses, stator EMFs and stator currents of
the three phases, the actual rotor speed, and the achieved speed control are
captured using the scope. The simulation time is 3 s and the power GUI is
continuous. The battery characteristics, namely the battery voltage, the
charging current and the charging status are also obtained in the scope.
3.3.1 BLDC Motor
Three-phase Permanent Magnet Synchronous Motor (PMSM), with
trapezoidal back EMF is configured as a model of BLDC motor in the
simulation. The stator windings are connected in star to an internal neutral
point. The rotor is non-salient pole type with trapezoidal flux pattern in the air
gap. The motor parameters are presented in Figure 3.3. The Hall signals and
the actual rotor speed are obtained as output from the motor.

47
Figure 3.3 Motor Parameters
3.3.2 Controller
The controller subsystem comprising of decoder and gate signals
generator is shown in Figure 3.4. The decoder receives Hall signals as its
input and the excitation voltages of the three-phases are generated as output by
the decoder. While the excitation voltages and the actual speed of the rotor are the
input to the gate signals generator, the PWM pulses (gate signals) are its output.
Figure 3.4 Controller – Subsystem

48
The decoder subsystem is shown in Figure 3.5.
Figure 3.5 Decoder–Subsystem
The excitation sequence of the phases a, b and c of the three-phase
BLDC motor for clock wise and counter clockwise direction of rotation of
motor are given in Table 3.1 and Table 3.2 respectively. Ha, Hb and Hc
represent the Hall sensor signals and EMFA, EMFB and EMFC represent the
excitation of phases A, B and C respectively.
Table 3.1 Sequence of excitation of phases – clockwise
Ha Hb Hc EMFA EMFB EMFC
0 0 0 0 0 0
0 0 1 0 -1 +1
0 1 0 -1 +1 0
0 1 1 -1 0 +1
1 0 0 +1 0 -1
1 0 1 +1 -1 0
1 1 0 0 +1 -1
1 1 1 0 0 0

49
Table 3.2 Sequence of excitation of phases – counter clockwise
Ha Hb Hc EMFA EMFB EMFC
0 0 0 0 0 0
0 0 1 0 +1 -1
0 1 0 +1 -1 0
0 1 1 +1 0 -1
1 0 0 -1 0 +1
1 0 1 -1 +1 0
1 1 0 0 -1 +1
1 1 1 0 0 0
3.3.3 Gate Signal Generation
The gate signal generator subsystem is displayed in the Figure 3.6.
The gate signals are generated from the decoder excitation voltages, after the
logical operations.
Figure 3.6 Gate Signal Generator–Subsystem

50
The commutation sequence implemented by the gate signal
generator is presented in Table 3.3 and Table 3.4 for clockwise and counter
clockwise direction respectively.
Table 3.3 Commutation Sequence – Clockwise
Ha Hb Hc EMFA EMFB EMFC S1 S2 S3 S4 S5 S6
0 0 0 0 0 0 0 0 0 0 0 0
0 0 1 0 -1 +1 0 0 0 1 1 0
0 1 0 -1 +1 0 0 1 1 0 0 0
0 1 1 -1 0 +1 0 1 0 0 1 0
1 0 0 +1 0 -1 1 0 0 0 0 1
1 0 1 +1 -1 0 1 0 0 1 0 0
1 1 0 0 +1 -1 0 0 1 0 0 1
1 1 1 0 0 0 0 0 0 0 0 0
Table 3.4 Commutation Sequence – Counter Clockwise
Ha Hb Hc EMFA EMFB EMFC S1 S2 S3 S4 S5 S6
0 0 0 0 0 0 0 0 0 0 0 0
0 0 1 0 -1 +1 0 0 1 0 0 1
0 1 0 -1 +1 0 1 0 0 1 0 0
0 1 1 -1 0 +1 1 0 0 0 0 1
1 0 0 +1 0 -1 0 1 0 0 1 0
1 0 1 +1 -1 0 0 1 1 0 0 0
1 1 0 0 +1 -1 0 0 0 1 1 0
1 1 1 0 0 0 0 0 0 0 0 0
The reference speed for the rotor is compared with the actual rotor
speed and error signal is passed on to the PI controller. The Kp and Ki values

51
are obtained as 1.0 by trial and error method. The PI controller’s output is
applied to the PWM generator block. This block generates pulses for carrier
based PWM, self-commutated IGBTs. The carrier frequency is assumed as
1080 Hz with a modulation index of 0.4.
PI controller is chosen due to its ease in design and simple
structure. The proportional (P) term of the controller is formed by multiplying
the error signal by a P gain, causing the PI controller to produce a control
response which is a function of the error magnitude. As the error signal
becomes larger, the P term of the controller becomes larger to provide more
correction. The effect of the P term tends to reduce the overall error as time
goes by. However the P term has less effect as the error approaches zero. In
most systems, the error of the controlled parameter gets very close to zero but
does not converge. The result is a small remaining steady state error.
The integral (I) term of the controller is used to eliminate small
steady state errors. The term I calculates a continuous running total of the
error signal. Therefore a small steady state error accumulates in to a large
error value over time. This accumulated error signal is multiplied by a gain
factor I and becomes the output term I of the PI controller. In the proposed
system, the PI controller is conventional and simple to achieve the desired
steady state response of the speed.
3.3.4 Regenerative Mode
The relay block subsystem for the regeneration process is shown in
Figure 3.7. Three switches are provided, which are normally open contacts of
relay coil. The normally open contacts are closed when the actual speed goes
below zero rpm. This happens when the brake is applied or when there is
reversal in direction of motor rotation. This results in the storage of the energy
in the battery. Otherwise, the brake energy will be dissipated as heat energy.

52
Figure 3.7 Relay Block – Subsystem
During the second and fourth quadrant operations, the BLDC
machine behaves like a generator and the generated voltage is used to charge
the battery. The rectifier converts the obtained AC voltage to DC of the
BLDC motor during the generation mode, to charge the battery. The
parameters of the battery are shown in Figure 3.8. The charge status is assumed
initially as 0%.
Figure 3.8 Battery Parameters

53
3.4 SIMULATION RESULTS
This section deals with the results obtained from the developed
Simulink model. The analyses of the results are presented as two case studies.
In the first case, the motor is on no-load, that is the applied load torque is
maintained at zero; the reference speed is specified and the actual speed is
observed.
In the second case, the load torque is applied at different instants
and the performance variables are observed. The load and the reference speed
are varied and the response of the machine is observed, as it operates in all the
four quadrants.
3.4.1 Speed Control at No-Load
In Table 3.5, the actual speeds obtained at different instants of time
under no-load conditions are compared with the reference speed of the rotor.
Table 3.5 Speed Control
Time (s) 0 0.5 1.0 1.5 2.0 2.5 3.0
Reference Speed (rpm) 0 200 300 400 400 300 200
Actual Speed (rpm) 0 200 300 400 400 300 200
The simulation is carried out for a time of 3 s and the continuous
power GUI mode is adopted. The Hall signals observed for the initial two
seconds are shown in Figure 3.9. The Hall signals received are lesser when
the speed is less from time 0.5 s to 1.0 s, but as the speed increases at 2 s the
Hall signals appear clustered and a frequent change in the position of the rotor
is observed.

54
Figure 3.9 Hall Signals – No load
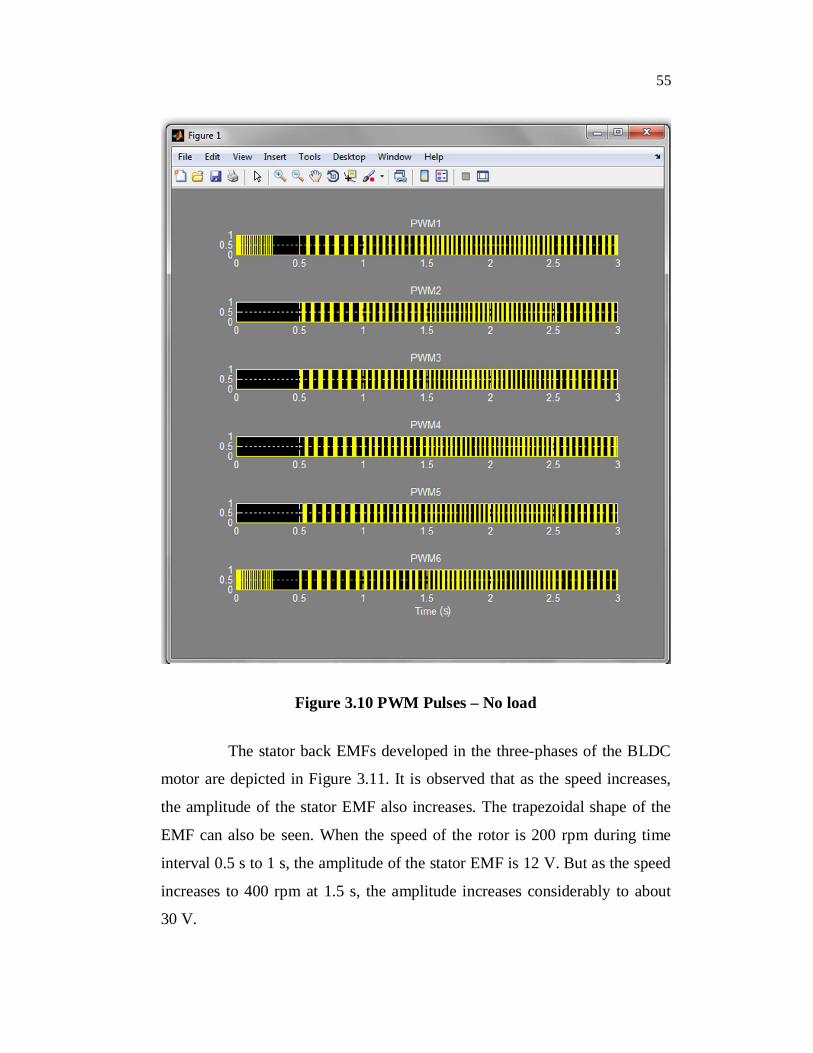
The PWM pulses applied to the inverter circuit are obtained
according to the commutation sequence are shown in Figure 3.10. All the six
pulses which are input to the six IGBTs of the inverter circuit are captured in
the scope.
(s)
55
Figure 3.10 PWM Pulses – No load
The stator back EMFs developed in the three-phases of the BLDC
motor are depicted in Figure 3.11. It is observed that as the speed increases,
the amplitude of the stator EMF also increases. The trapezoidal shape of the
EMF can also be seen. When the speed of the rotor is 200 rpm during time
interval 0.5 s to 1 s, the amplitude of the stator EMF is 12 V. But as the speed
increases to 400 rpm at 1.5 s, the amplitude increases considerably to about
30 V.
(s)

56
Figure 3.11 Stator back EMFs – No load
The stator currents of the three phases (Figure 3.12) clearly show a
spike at 0.5 s, 1s, 1.5 s and 2.5 s. These are the instants at which there is a
change in the speed of the BLDC motor.
(s)

57
Figure 3.12 Stator Currents – No load
The actual rotor speed in rpm and the electromagnetic torque in Nm
developed in the motor are shown separately in Figure 3.13. It is observed
that the developed torque is continuous.
(s)

58
Figure 3.13 Rotor Speed and Electromagnetic Torque – No load
The actual speed attains the steady state in a very short span of time
and settles down too quickly at the reference speed. The stator currents and
actual speed obtained, for no-load condition are presented in Figure 3.14.
(s)

59
Figure 3.14 Stator Currents & Actual Speed – No load
3.4.2 Four Quadrant Operation
The operation of the BLDC motor in all the four quadrants is
simulated and the results are presented in this section. In Table 3.6, the
reference speed, the applied load torque and the quadrant it belongs to, for a
time period of 3 s, are presented. The simulation time is 3 s and continuous
power GUI mode is adopted.
(s)

60
Table 3.6 Quadrant Determination
Time 0 0.5 1.0 1.75 2.0 2.5 2.75 3.0
Reference Speed (rpm) 0 200 200 200 0 -200 -200 0
Applied Load Torque (Nm) 0 0 +1 -1 -1 -1 +1 +1
Quadrant Initial I I II II III IV
For the simulation study,
From start up to 1.0 s, the torque applied is positive. That is,
the machine is operating in the first quadrant, forward
motoring.
At time 1.75 s negative torque is applied. This implies that a
sudden brake is applied. The rotor speed is drastically brought
to zero at 2.0 s; this is the second quadrant of operation,
forward braking.
At 2.5 s the motor is forced to rotate in the reverse direction,
the applied torque remains negative. Since torque and speed
are negative, the motor is operating in the third quadrant,
reverse motoring.
While at 2.75 s the load torque applied is positive, this is
reverse motoring and sudden brake is applied which drops
down the rotor speed to zero rpm, indicating that the motor is
in the fourth quadrant, reverse braking, of speed torque
characteristics.

61
The Hall signals from the Hall sensors of the BLDC machine
shows the difference in the pulse pattern during the four quadrants of
operation over the simulated time of 3 s (Figure 3.15).
Figure 3.15. Hall Signals
The PWM pulses applied to the inverter as found in Figure 3.16
shows the distribution of pulses.
(s)

62
Figure 3.16 PWM pulses
The variation in the amplitude of the stator back EMFs of all the
three phases are clearly visible in the scope results shown in Figure 3.17. The
trapezoidal shape is also seen. At the instant, when the load torque becomes
negative, the amplitude of the back EMF increases to about 58 V. When brake
is applied at time 2.75 s, the amplitude of stator back EMF reduces to zero.
(s)

63
Figure 3.17 Stator Back EMFs
Figure 3.18 shows the different patterns of the stator currents for
the four quadrants of operation. The transition from one quadrant to another is
clearly observed in this waveform. The sharp spikes at 0.5 s and 2.5 s indicate
the start of the motor and the change in direction of rotation of the motor.
(s)

64
Figure 3.18 Stator Currents
The actual rotor speed in rpm is shown in Figure 3.19. When the
applied torque is positive, the motor attains the reference speed with few
oscillations. But when negative load torque is applied, the reference speed is
not attained as it aids the motor to run. Again when the positive load torque is
applied at 2.75 s, the motor settles down to the reference speed as expected.
(s)

65
Figure 3.19 Rotor Speed and Electromagnetic Torque
The electromagnetic torque is developed during the operation of the
motor in all of its four quadrants which is also depicted in Figure 3.19. The
developed torque is also negative between 1.75 s and 2.75 s. After 2.75 s, the
electromagnetic torque builds up to become positive.
The reference speed and the actual rotor speed obtained in the same
reference scale are displayed in Figure 3.20 in order to observe the deviation
in the speed during the application of negative torque.

66
Figure 3.20 Speed Control
From Figures 3.14 and 3.20, on comparison, it is observed that
speed control is better under no-load conditions than when applying a
negative torque. When the motor is not loaded, the actual speed follows the
reference speed and attains the steady state. But during the negative torque
condition, the actual speed does not follow the reference speed, as the
negative torque aids the motor to increase its speed.

67
3.4.3 Regenerative Mode
When the machine is operating in the second and fourth quadrants,
it is said to be in the regenerative mode. During these modes of operation, the
kinetic energy will be wasted as heat energy when brake is applied. In the
proposed system, effective utilisation of this energy is attempted. Hence, the
relay block of the Simulink model closes the normally open contacts and
returns back the energy through a rectifier to be stored in a chargeable battery.
The battery voltage, the battery charging current and the charge status of the
battery which is initially zero is shown in Figure 3.21. At 1.75 s, the battery
has attained the full charge of 100%. When the negative torque is applied, the
battery voltage and current becomes zero.
Figure 3.21 Battery Characteristics

68
Energization of the battery at various operating conditions such as
different applied torques, both positive and negative and with various
directions of rotation, clockwise and counter clockwise are presented in
Table 3.7.
The table indicates that maximum energization is in the first
quadrant followed by the fourth quadrant, where the torque applied is
positive. When the torque becomes negative it results in very less or no
energization of the battery.
Table 3.7 Energization of Battery
Quadrant Applied Load Torque (Nm)
Reference Speed (rpm)
% Charge Status
I
3 100 494 100 585 100 656 100 68
II
-3 100 0.37-4 100 0.37-5 100 0.37-6 100 0.37
III
-3 -100 0.36-4 -100 0.37-5 -100 0.37-6 -100 0.37
IV
3 -100 0.44 -100 2.55 -100 126 -100 18

69
3.5 CONCLUSION
The speed control achieved through the simulation of a three-phase
BLDC motor during no-load and on-load conditions are discussed. The
possibility of energising a battery during the regenerative braking period is
reviewed. The hardware realisation of the proposed Simulink model will be
presented in the forthcoming chapter.