Chapter 2 : Fundamental of Mathematical Modeling
91
Chapter_2 : Fundamental of Mathematical Modeling
Transcript of Chapter 2 : Fundamental of Mathematical Modeling

Chapter_2 : Fundamental of Mathematical
Modeling

Objectives
Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Upon completing this topic, students should be able
to find:
– the Laplace Transform of time functions and the inverse
Laplace Transform.
– manually and with MatLab, the Transfer Function from
Mathematical Models
– Signal flow graphs from Block Diagram
– Transfer Function using Mason’s Rule
11/10/2021 2

Contents
Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
1. Introduction
2. Laplace Transform
3. Transfer Function;- Numerical
- With MatLab
4. Block Diagram Models- Block Diagram Algebra
- Signal Flow Graphs and Mason’s Rule
11/10/2021 3

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
CHAP_2. 1: Introduction
11/10/2021 4

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
To understand and control complex systems, one must obtain
quantitative mathematical models of these systems. A mathematical model is a set of equations (usually
differential equations) that represents the dynamics of systems.
differential equations are obtained by using physical laws of
engineering such as Newton’s laws of motion, Kirchhoff's laws
of electrical network, Ohm’s laws, etc.
The equations of the mathematical model may be solved using
mathematical tools such as the Laplace Transform.
Before solving the equations, we usually need to linearize them.
In practice, the complexity of the system requires some
assumptions in the determination model.
2. 1 Introduction
11/10/2021 5

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Obtained by applying the physical laws of the process: Therefore:
i. Mechanical Systems Newton’s laws
ii. Electrical Systems *Kirchhoff's laws
* Ohm’s laws
* Mesh & Nodal Analysis
Example_1: Springer-mass-damper mechanical system.
Differential Equations
• Hence for viscous wall: 𝑓 𝑡 = 𝑏𝑣 𝑡
* Assumption: Wall friction force f 𝒕 is
linearly proportional to the velocity 𝒗 of
the mass 𝑀 .
• and for spring: 𝑓 𝑡 = 𝑘 0
𝑡𝑣 𝜏 𝑑𝜏
= 𝑘𝑦 𝑡
The time function
of 𝒓 𝒕 is called
forcing function
11/10/2021 6

Step_1: Free-Body Diagram (FBD): Step_2: Newton’s 2nd Law.
𝐹 = 𝑀𝑎 𝑡 : for translation motionOr:
• 𝑣 𝑡 = 𝑦 =𝑑𝑦 𝑡
𝑑𝑡
• 𝑎 𝑡 = 𝑦 =𝑑2𝑦 𝑡
𝑑𝑡2
Hence:
𝑀𝑎 𝑡 = −𝑏𝑣 𝑡 − 𝑘𝑦 𝑡 + 𝑟 𝑡
𝑀𝑑𝑣 𝑡
𝑑𝑡+ 𝑏𝑣 𝑡 + 𝑘𝑦 𝑡 = 𝑟 𝑡
Finally, the differential equation is:
𝑀𝑑2𝑦 𝑡
𝑑𝑡2 + 𝑏𝑑𝑦 𝑡
𝑑𝑡+ 𝑘𝑦 𝑡 = 𝑟 𝑡
Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Mechanical System Analysis:
11/10/2021 7

• For the following mechanism, define:
i. The input → 𝑭ii.The output → 𝒚.
Newton’s 2nd Law:
𝐹 = 𝑀𝑎 𝑡 : for translation motion
Hence:
𝑀𝑎 𝑡 = 𝐹 − 𝑘𝑦 𝑡 − 𝑓𝑣𝑣 𝑡
𝑀𝑑𝑣 𝑡
𝑑𝑡+ 𝑘𝑦 𝑡 + 𝑓𝑣𝑣 𝑡 = 𝐹 𝑡
Finally, the differential equation is:
𝑀𝑑2𝑦 𝑡
𝑑𝑡2 + 𝑓𝑣𝑑𝑦 𝑡
𝑑𝑡+ 𝑘𝑦 𝑡 = 𝐹 𝑡
Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Example_2: A Mechanical Mechanism.
• for viscous damper: 𝑓 𝑡 = 𝑓𝑣𝑣 𝑡
= 𝑓𝑣𝑑𝑦 𝑡
𝑑𝑡
y
k
f
F
mM
𝒇𝒗
11/10/2021 8

• For the following circuit, define:
i. The input → 𝒖𝒓ii.The output → 𝒖𝒄.
Kirchhoff voltage law (KVL):
𝑉𝑅 + 𝑉𝐿 + 𝑢𝑐 𝑡 = 𝑢𝑟 𝑡
Hence:
Ohm's laws:
𝐿𝑑𝑖 𝑡
𝑑𝑡+ 𝑅𝑖 𝑡 + 𝑢𝑐 𝑡 = 𝑢𝑟 𝑡
Or:
• 𝑖 𝑡 = 𝐶𝑑𝑢𝑐
𝑑𝑡(capacitor)
• 𝑣 𝑡 = 𝐿𝑑𝑖(𝑡)
𝑑𝑡(inductor)
Therefore, the differential equation is:
𝑑2𝑢𝑐 𝑡
𝑑𝑡2 +𝑅
𝐿
𝑑𝑢𝑐 𝑡
𝑑𝑡+
1
𝐿𝐶𝑢𝑐 𝑡 =
1
𝐿𝐶𝑢𝑟 𝑡
Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Example_3: A Passive Electrical Circuit.
11/10/2021 9
Initial conditions:
• 𝑖 0 = 𝐼0: current through inductor
• 𝑣 0 =1
𝐶 −∞
0𝑖 𝜏 𝑑𝜏 = 𝑉0:
voltage across capacitor
ur
uc
R L
Ci

• Define the differential equation for the following RLC electrical circuit:
Kirchhoff voltage law (KVL):
𝑉𝐿 + 𝑉𝑅 + 𝑉𝐶 = 0Hence:
Ohm’s lawsOr:
• 𝑣 𝑡 = 𝐿𝑑𝑖 𝑡
𝑑𝑡(inductor)
• 𝑣 𝑡 =1
𝐶 0
𝑡𝑖 𝜏 𝑑𝜏(capacitor)
Thus:
𝐿𝑑𝑖 𝑡
𝑑𝑡+ 𝑅𝑖 𝑡 +
1
𝐶 0
𝑡𝑖 𝜏 𝑑 𝑑𝜏 = 0
Therefore, the differential equation is:
𝑑2𝑖 𝑡
𝑑𝑡2 +𝑅
𝐿
𝑑𝑖 𝑡
𝑑𝑡+
1
𝐿𝐶𝑖 𝑡 = 0
Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Example_4: Source-Free Series RLC Circuit.
11/10/2021 10
Initial conditions:
• 𝑖 0 = 𝐼0: current through inductor
• 𝑣 0 =1
𝐶 −∞
0𝑖 𝜏 𝑑𝜏 = 𝑉0: voltage
across capacitor
+
−

1. Define the differential equation for the following Mechanical System:
2. Define the differential equation for the following RLC Electrical Network:
Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Try …
11/10/2021 11
𝐴𝑛𝑠: 𝑚 𝑥0 + 𝑏 𝑥0 + 𝑘𝑥0 = 𝑏 𝑥𝑖 + 𝑘𝑥𝑖
𝑘 𝑏
𝑥𝑖
𝑥0
𝑚

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
CHAP_2. 2: Laplace Transform
11/10/2021 12

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
The differential equations (time-domain) are transformed by
the Laplace Transform into algebraic equations (frequency-
domain), which are easier to solve.
Equations:
1) Laplace Transform:
2) Inverse Laplace Transform:
2. 2 Laplace Transform
Time-domain signals Frequency –domain signals
ℒ 𝑓 𝑡 = 𝐹 𝑠 = 0
∞
𝑓 𝑡 𝑒−𝑠𝑡𝑑𝑡
ℒ−1 𝐹 𝑠 =1
2𝜋𝑗 𝜎−𝑗∞
𝜎+𝑗∞
𝐹 𝑠 𝑒𝑠𝑡𝑑𝑆 = 𝑓 𝑡 𝑢 𝑡
Transfer Function 𝐹 𝑠 is a function in Laplace domain 𝑠 where 𝒔 is a complex number: 𝒔 = 𝜶 + 𝒋𝝎
11/10/2021 13

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
A. Laplace Transform Table & Theorems
No. f(t) F(s)
1. δ 𝑡 1
2. u 𝑡1
𝑠
3. tu 𝑡1
𝑠2
4. 𝑡𝑛u 𝑡𝑛!
𝑠𝑛+1
5. 𝑒−𝑎𝑡u 𝑡1
𝑠 + 𝑎
6. 𝑡𝑒−𝑎𝑡u 𝑡1
𝑠 + 𝑎 2
7. 𝑡𝑛𝑒−𝑎𝑡u 𝑡𝑛!
𝑠 + 𝑎 𝑛+1
8. 1 − 𝑎𝑡 𝑒−𝑎𝑡u 𝑡𝑠
𝑠 + 𝑎 2
9.1
𝑎1 − 𝑒−𝑎𝑡u 𝑡
1
𝑠 𝑠 + 𝑎
⇐ Impulse function or Unit Impulse Function
⇐ Step function or Unit Step Function
⇐ Ramp function
1) Laplace Transform Table
11/10/2021 14
No. f(t) F(s)
10. 𝑠𝑖𝑛 𝜔𝑡 u 𝑡𝜔
𝑠2 + 𝜔2
11. 𝑐𝑜𝑠 𝜔𝑡 u 𝑡𝑠
𝑠2 + 𝜔2
12. 𝑒−𝑎𝑡 𝑠𝑖𝑛 𝜔𝑡 u 𝑡𝜔
𝑠 + 𝑎 2 + 𝜔2
13. 𝑒−𝑎𝑡 𝑐𝑜𝑠 𝜔𝑡 u 𝑡𝑠 + 𝑎
𝑠 + 𝑎 2 + 𝜔2

2) Laplace Transform TheoremsNo. Theorem Name
1. ℒ 𝑓 𝑡 = 𝐹 𝑠 = 0
∞
𝑓 𝑡 𝑒−𝑠𝑡𝑑𝑡 Laplace definition
2. ℒ 𝑘𝑓 𝑡 = 𝑘𝐹 𝑠 Linearity Theorem
3. ℒ 𝑓1 𝑡 + 𝑓2 𝑡 = 𝐹1 𝑠 + 𝐹2 𝑠 Linearity Theorem
4. ℒ 𝑒−𝑎𝑡𝑓 𝑡 = 𝐹 𝑠 + 𝑎 Frequency Shift Theorem
5. ℒ 𝑓 𝑡 − 𝑇 = 𝑒−𝑠𝑇𝐹 𝑠 Time Shift 𝑇 Theorem
6. ℒ 𝑓 𝑎𝑡 =1
𝑎𝐹
𝑠
𝑎Scaling Theorem
7. ℒ𝑑𝑓 𝑡
𝑑𝑡= 𝑠𝐹 𝑠 − 𝑓 0− Differentiation Theorem
8. ℒ𝑑2𝑓 𝑡
𝑑𝑡2= 𝑠2𝐹 𝑠 − 𝑠𝑓 0− − 𝑓′ 0− Differentiation Theorem
9. ℒ𝑑𝑛𝑓 𝑡
𝑑𝑡𝑛= 𝑠𝑛𝐹 𝑠 −
𝑘=1
𝑛
𝑠𝑛−𝑘 𝑓𝑘−1 0− Differentiation Theorem
(in general)
10. ℒ 0
𝑡
𝑓 𝜏 𝑑𝜏 =𝐹 𝑠
𝑠Integration Theorem
11. 𝑓 ∞ = 𝑙𝑖𝑚𝑠→0
𝑠𝐹 𝑠 Final Value Theorem
12. 𝑓 0+ = 𝑙𝑖𝑚𝑠→∞
𝑠𝐹 𝑠 Initial Value Theorem11/10/2021 15

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
ExampleWith 𝒖 𝒕 a unit step, find the Laplace Transform of the following function 𝑦 𝑡 , assuming zeros initial conditions:
𝑑2𝑦 𝑡
𝑑𝑡2 + 12𝑑𝑦 𝑡
𝑑𝑡+ 32𝑦 𝑡 = 32𝑢 𝑡
Solution:
• ℒ𝑑2𝑦 𝑡
𝑑𝑡2 = 𝑠2𝑌 𝑠 − 𝑠𝑦 0− − 𝑦′ 0−
• ℒ 12𝑑𝑦 𝑡
𝑑𝑡= 12 𝑠𝑌 𝑠 − 𝑦 0−
• ℒ 32𝑦 𝑡 = 32𝑌 𝑠
• ℒ 32𝑢 𝑡 = 32𝑈 𝑠
With zeros initial conditions, we finally obtain the Laplace Transform as:
𝑠2𝑌 𝑠 + 12𝑠𝑌 𝑠 + 32𝑌 𝑠 = 32𝑈 𝑠
11/10/2021 16
Zeros Initial Conditions:• 𝑦 0− = 0• 𝑦′ 0− = 0

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Try…1) With 𝒇 𝒕 a unit step, find the Laplace Transform of the
following function:
𝑑2𝑦 𝑡
𝑑𝑡2 + 2𝑑𝑦 𝑡
𝑑𝑡+ 10𝑦 𝑡 =
𝑑𝑓 𝑡
𝑑𝑡
Assume the initial conditions as:
• 𝑓 0− = 0, 𝑦 0− = 0 and𝑑𝑦 0−
𝑑𝑡= 1
2) Find the Laplace Transform of the following function:
𝑓 𝑡 = 𝑡𝑒−5𝑡
11/10/2021 17
𝐴𝑛𝑠: 𝑠2𝑌 𝑠 + 2𝑠𝑌 𝑠 + 10𝑌 𝑠 − 1 = 𝑠𝐹 𝑠
𝐴𝑛𝑠: 𝐹 𝑠 =1
𝑠 + 5 2

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
B. Inverse Laplace Transform
General form:
Three (3) possible cases:
i. Case_1: Roots of 𝐷 𝑠 are real & distinct;
ii.Case_2: Roots of 𝐷 𝑠 are real & repeated;
iii.Case_3: Roots of 𝐷 𝑠 are complex conjugate;
𝐹 𝑠 =𝑁 𝑠
𝐷 𝑠
Numerator
Denominator
o Hint: Use ‘Partial Fraction Expansion’
11/10/2021 18

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
• Example: 𝐹 𝑠 =2
𝑠+1 𝑠+2
Solution:
• 𝐹 𝑠 =2
𝑠+1 𝑠+2=
𝐴
𝑠+1+
𝐵
𝑠+2(Partial Fraction Expansion)
=2
𝑠+1−
2
𝑠+2
• The inverse Laplace Transform or Time Response is:
𝑓 𝑡 = 2𝑒−𝑡𝑢 𝑡 − 2𝑒−2𝑡𝑢 𝑡
As 𝑢 𝑡 is the unit step function, 𝑓 𝑡 can finally be expressed in another way as:
It is found that: 𝐴 = 2 and 𝐵 = −2
11/10/2021 19
i. Case_1: Roots of 𝐷 𝑠 are real & distinct
Item No.5 in the Laplace Transform Table
𝑓 𝑡 = 2𝑒−𝑡 − 2𝑒−2𝑡 = 2 𝑒−𝑡 − 𝑒−2𝑡

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
𝐹 𝑠 =2
𝑠+1 𝑠+2=
𝐴
𝑠+1+
𝐵
𝑠+2
=𝐴 𝑠+2 +𝐵 𝑠+1
𝑠+1 𝑠+2
Hence:
𝐴 𝑠 + 2 + 𝐵 𝑠 + 1 = 2
Solving steps:
Case_1: 𝑠 + 1 = 0 ⇒ 𝑠 = −1⇒ 𝐴 −1 + 2 = 2⇒ 𝐴 = 2
Case_2: 𝑠 + 2 = 0 ⇒ 𝑠 = −2⇒ 𝐵 −2 + 1 = 2⇒ 𝐵 = −2
11/10/2021 20
Work out Method:

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Try…
- Find the Inverse Laplace Transform of the following function:
a) G 𝑠 =𝑠+3
𝑠+1 𝑠+2
Solution:
b) G 𝑠 =32
𝑠 𝑠2+12𝑠+32
Solution:
11/10/2021 21
𝐴𝑛𝑠: 𝑔 𝑡 = 2𝑒−𝑡 − 𝑒−2𝑡
𝐴𝑛𝑠: 𝑔 𝑡 = 𝑒−𝑡 − 2𝑒−4𝑡 + 𝑒−8𝑡

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
ii. Case_2: Roots of 𝐷 𝑠 are real & repeated
•Example: 𝐹 𝑠 =2
𝑠+1 𝑠+2 2
Solution:
• 𝐹 𝑠 =2
𝑠+1 𝑠+2 2 =𝐴
𝑠+1+
𝐵
𝑠+2+
𝐶
𝑠+2 2
=2
𝑠+1−
2
𝑠+2−
2
𝑠+2 2
• Finally,
Example:
• 𝐹 𝑠 =2
𝑠+1 𝑠+2 2 =𝐴
𝑠+1+
𝐵
𝑠+2+
𝐶
𝑠+2 2
=𝐴 𝑠+2 2+𝐵 𝑠+1 𝑠+2 +𝐶 𝑠+1
𝑠+1 𝑠+2 2
It is found that: 𝐴 = 2, 𝐵 = −2 and 𝐶 = −2
𝑓 𝑡 = 2𝑒−𝑡 − 2𝑒−2𝑡 − 2𝑡𝑒−2𝑡
11/10/2021 22
Work out Method:

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Thus:
• 𝐹 𝑠 =2
𝑠+1 𝑠+2 2 =𝐴 𝑠+2 2+𝐵 𝑠+1 𝑠+2 +𝐶 𝑠+1
𝑠+1 𝑠+2 2
=𝐴 𝑠2+4𝑠+4 +𝐵 𝑠2+3𝑠+2 +𝐶 𝑠+1
𝑠+1 𝑠+2 2 =𝐴𝑠2+4𝐴𝑠+4𝐴+𝐵𝑠2+3𝐵𝑠+2𝐵+𝐶𝑠+𝐶
𝑠+1 𝑠+2 2
⇔ 𝐹 𝑠 =2
𝑠+1 𝑠+2 2 =𝑠2 𝐴+𝐵 +𝑠 4𝐴+3𝐵+𝐶 + 4𝐴+2𝐵+𝐶
𝑠+1 𝑠+2 2
Equating like powers of "𝒔" gives us a system of equations as:
11/10/2021 23
Powers of "𝒔" Equation
𝑠2 𝐴 + 𝐵 = 0
𝑠1 4𝐴 + 3𝐵 + 𝐶 = 0
𝑠0 4𝐴 + 2𝐵 + 𝐶 = 2
Solving the system of equations yields:
𝐴 = 2
B= −2
C= −2
Work out Method (Cont′d):

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Try…
- Find the Inverse Laplace Transform of the following functions:
a) 𝐹 𝑠 =𝑠+3
𝑠+1 3 𝑠+2
Solution:
b) G 𝑠 =𝑠2+1
𝑠2 𝑠+2
Solution:
11/10/2021 24
𝐴𝑛𝑠: 𝑓 𝑡 = 𝑡2𝑒−𝑡 − 𝑡𝑒−𝑡 + 𝑒−𝑡 − 𝑒−2𝑡
= 𝑒−𝑡 𝑡2 − 𝑡 + 1 − 𝑒−2𝑡
𝐴𝑛𝑠: 𝑔 𝑡 =5
4𝑒−2𝑡 +
1
2𝑡 −
1
4

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
iii.Case_3: Roots of 𝐷 𝑠 are complex conjugate
•Example: 𝐹 𝑠 =3
𝑠 𝑠2+2𝑠+5
Solution:
• 𝐹 𝑠 =3
𝑠 𝑠2+2𝑠+5=
𝐴
𝑠+
𝐵𝑠+𝐶
𝑠2+2𝑠+5
= 35
𝑠−
3
5
𝑠+2
𝑠2+2𝑠+5
= 35
𝑠−
3
5
𝑠+1+1
𝑠2+2𝑠+5=
35
𝑠−
3
5
𝑠+1 + 1 2 2
𝑠+1 2+22
= 35
𝑠−
3
5
𝑠+1
𝑠+1 2+22 + 1 2 2
𝑠+1 2+22
• Finally,
It is found that: 𝐴 = 3 5, 𝐵 = −3 5 and 𝐶 = −6 5
𝑓 𝑡 =3
5−
3
5𝑒−𝑡 𝑐𝑜𝑠 2𝑡 +
1
2𝑒−𝑡𝑠𝑖𝑛2𝑡 =
3
5−
3
5𝑒−𝑡 𝑐𝑜𝑠 2𝑡 +
1
2𝑠𝑖𝑛 2𝑡
11/10/2021 25

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
•Example:
𝐹 𝑠 =3
𝑠 𝑠2+2𝑠+5=
𝐴
𝑠+
𝐵𝑠+𝐶
𝑠2+2𝑠+5=
𝐴 𝑠2+2𝑠+5 + 𝐵𝑠+𝐶 𝑠
𝑠 𝑠2+2𝑠+5
=𝐴𝑠2+2𝐴𝑠+5𝐴+𝐵𝑠2+𝐶𝑠
𝑠 𝑠2+2𝑠+5=
𝑠2 𝐴+𝐵 +𝑠 2𝐴+𝐶 +5𝐴
𝑠 𝑠2+2𝑠+5
⇔ 𝐹 𝑠 =3
𝑠 𝑠2+2𝑠+5=
𝑠2 𝐴+𝐵 +𝑠 2𝐴+𝐶 +5𝐴
𝑠 𝑠2+2𝑠+5
Equating like powers of "𝒔" gives us a system of equations as:
11/10/2021 26
Work out Method:
Powers of "𝒔" Equation
𝑠2 𝐴 + 𝐵 = 0
𝑠1 2𝐴 + 𝐶 = 0
𝑠0 5𝐴 = 3
Solving the system of equations yields:
𝐴 = 3 5
B= − 3 5
C= − 6 5

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Try…
- Find the Inverse Laplace Transform of the following functions:
a) 𝐹 𝑠 =𝑠+3
𝑠2+4𝑠+5 𝑠+5
Solution:
b) G 𝑠 =10
𝑠2+9 𝑠+1
Solution:
11/10/2021 27
𝐴𝑛𝑠: 𝑓 𝑡 = −1
5𝑒−5𝑡 +
1
5𝑐𝑜𝑠 𝑡 𝑒−2𝑡 +
2
5𝑠𝑖𝑛 𝑡 𝑒−2𝑡
𝐴𝑛𝑠: 𝑔 𝑡 = 𝑒−𝑡 − 𝑐𝑜𝑠 3𝑡 −1
3𝑠𝑖𝑛 3𝑡

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Partial-Fraction Expansion with MATLAB Three (3) steps to obtain the Partial-Fraction Expansion :
1. Define the coefficients in descending powers of 𝑠 as follow:o Coefficients of numerator polynomial as numerator coefficients ,o Coefficients of denominator polynomial as denominator
coefficients
2. Use the ′𝒓𝒆𝒔𝒊𝒅𝒖𝒆′ command to get the residues 𝒓 , poles 𝒑and direct terms 𝒌 of a Partial-Fraction Expansion of the ratio of the two polynomials 𝐵 𝑠 and 𝐴 𝑠 ;
3. The partial-fraction expansion of 𝐵 𝑠 𝐴 𝑠 is given by:
𝐵 𝑠
𝐴 𝑠= 𝑘 𝑠 +
𝑟 1
𝑠 − 𝑝 1+
𝑟 2
𝑠 − 𝑝 2+ ⋯ +
𝑟 𝑛
𝑠 − 𝑝 𝑛
Syntax:
𝑟, 𝑝, 𝑘 = 𝑟𝑒𝑠𝑖𝑑𝑢𝑒 𝑛𝑢𝑚𝑒𝑟𝑎𝑡𝑜𝑟 𝑐𝑜𝑓𝑓𝑖𝑐𝑖𝑒𝑛𝑡𝑠 , 𝑑𝑒𝑛𝑜𝑚𝑖𝑛𝑎𝑡𝑜𝑟 𝑐𝑜𝑒𝑓𝑓𝑖𝑐𝑖𝑒𝑛𝑡𝑠
11/10/2021 28

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Example Get the partial-fraction expansion for the following expression:
𝐵 𝑠
𝐴 𝑠=
𝑠4+8𝑠3+16𝑠2+9𝑠+6
𝑠3+6𝑠2+11𝑠+6
Solution- Step_1: Coefficient definition:
o Numerator: 𝑁 = 1 8 16 9 6o Denominator: 𝐷 = 1 6 11 6
- Step_2: ‘residue’ command in Matlab
o 𝑟, 𝑝, 𝑘 = 𝑟𝑒𝑠𝑖𝑑𝑢𝑒 1 8 16 9 6 , 1 6 11 6= 𝑟𝑒𝑠𝑖𝑑𝑢𝑒 𝑁, 𝐷
11/10/2021 29

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Solution (Cont’d) MatLab Results:
For direct terms 𝒌 :
𝒌 𝒔 = 𝟏𝒔𝟏 + 𝟐𝒔𝟎 = 𝒔 + 𝟐
- Step_3: Write the partial-fraction expansion as:
𝐵 𝑠
𝐴 𝑠=
𝑠4+8𝑠3+16𝑠2+9𝑠+6
𝑠3+6𝑠2+11𝑠+6⇔
𝐵 𝑠
𝐴 𝑠= 𝑠 + 2 −
6
𝑠+3−
4
𝑠+2+
3
𝑠+1
11/10/2021 30

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Try… With MatLab, get the partial-fraction expansion for the following
expressions:
1) 𝐹 𝑠 =−4𝑠+8
𝑠2+6𝑠+8
2) 𝐺 𝑠 =2𝑠4+𝑠
𝑠2+1
11/10/2021 31
𝐴𝑛𝑠: 𝐹 𝑠 =−12
𝑠 + 4+
8
𝑠 + 2
𝐴𝑛𝑠: 𝐺 𝑠 = 2𝑠2 − 2 +0.5 − 𝑖
𝑠 − 𝑖+
0.5 + 𝑖
𝑠 + 𝑖

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
The Laplace Transform can be used to solve differential
equations using a four step process:
1. Take the Laplace Transform of the differential equationusing the derivative property (and, perhaps, others) as necessary.
2. Put initial conditions into the resulting equation.
3. Solve for the output variable.
4. Get result from the Laplace Transform Tables. (look up the terms individually):
- If the result is in a form that is not in the tables, you'll need to use the Inverse Laplace Transform.
C. Steps to Solving Differential Equations
11/10/2021 32

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Examples
1) Find the response 𝑦 𝑡 for the following differential equation 𝑑𝑦 𝑡
𝑑𝑡+ 2𝑦 𝑡 = 𝑓 𝑡 , with input 𝑓 𝑡 and output 𝑦 𝑡 ;
if 𝑓 𝑡 = 𝑢 𝑡 − 𝑢 𝑡 − 1 i.e. a Unit Step Function, and the initial condition 𝑦 0− = −2.
Solution:- Step_1: Take the Laplace Transform of the differential equation.
• ℒ𝑑𝑦 𝑡
𝑑𝑡= 𝑠𝑌 𝑠 − 𝑦 0−
• ℒ 𝑦 𝑡 = 𝑌 𝑠
• ℒ 𝑓 𝑡 = 𝐹 𝑠 =1
𝑠− 𝑒−𝑠𝐹 𝑠 =
1
𝑠− 𝑒−𝑠 1
𝑠
So,
𝑑𝑦 𝑡
𝑑𝑡+ 2𝑦 𝑡 = 𝑢 𝑡 − 𝑢 𝑡 − 1 →
ℒ𝑠𝑌 𝑠 − 𝑦 0− + 2𝑌 𝑠 =
1
𝑠− 𝑒−𝑠 1
𝑠
11/10/2021 33

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Solution (Cont’d)
- Step_2: Put initial conditions into the resulting equation.
• 𝑠𝑌 𝑠 − 𝑦 0− + 2𝑌 𝑠 =1
𝑠− 𝑒−𝑠 1
𝑠(The resulting equation)
• 𝑠𝑌 𝑠 + 2 + 2𝑌 𝑠 =1
𝑠− 𝑒−𝑠 1
𝑠(After putting the initial condition)
- Step_3: Solve for the output variable 𝑌 𝑠 .
• 𝑌 𝑠 =1
𝑠 𝑠+2− 𝑒−𝑠 1
𝑠 𝑠+2− 2
1
𝑠+2
- Step_4: Get result from the Laplace Transform Tables.
• ℒ−1 1
𝑠 𝑠+2=
1
21 − 𝑒−2𝑡
• ℒ−1 −𝑒−𝑠 1
𝑠 𝑠+2=
1
21 − 𝑒−2 𝑡−1 𝑢 𝑡 − 1
• ℒ−1 −21
𝑠+2= −2𝑒−2𝑡
Finally: 𝑦 𝑡 =12 1 − 𝑒−2𝑡 − 1
21 − 𝑒−2 𝑡−1 𝑢 𝑡 − 1 − 2𝑒−2𝑡
11/10/2021 34

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Examples (Cont’d)
2) Find the response 𝑦 𝑡 for the following differential equation: 𝑑2𝑦 𝑡
𝑑𝑡2 + 2𝑑𝑦 𝑡
𝑑𝑡+ 10𝑦 𝑡 =
𝑑𝑓 𝑡
𝑑𝑡, with input 𝑓 𝑡 and output 𝑦 𝑡 ;
if 𝑓 𝑡 = 𝑢 𝑡 i.e. a unit step input, and
the initial conditions: 𝑓 0− = 0, 𝑦 0− = 0 and𝑑𝑦 0−
𝑑𝑡= 1.
Solution:- Step_1: Take the Laplace Transform of the differential equation.
• ℒ𝑑2𝑦 𝑡
𝑑𝑡2 = 𝑠2𝑌 𝑠 − 𝑠𝑦 0− − 𝑦′ 0−
• ℒ 2𝑑𝑦 𝑡
𝑑𝑡= 2 𝑠𝑌 𝑠 − 𝑦 0−
• ℒ 10𝑦 𝑡 = 10𝑌 𝑠
• ℒ𝑑𝑓 𝑡
𝑑𝑡= 𝑠𝐹 𝑠 − 𝑓 0− = 𝑠
1
𝑠= 1
So,𝑑2𝑦 𝑡
𝑑𝑡2+ 2
𝑑𝑦 𝑡
𝑑𝑡+ 10𝑦 𝑡 =
𝑑𝑓 𝑡
𝑑𝑡→ℒ
𝑠2𝑌 𝑠 − 𝑠𝑦 0− − 𝑦′ 0− + 2 𝑠𝑌 𝑠 − 𝑦 0− + 10𝑌 𝑠 = 1
11/10/2021 35

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Solution (Cont’d)
- Step_2: Put initial conditions into the resulting equation.
• 𝑠2𝑌 𝑠 − 𝑠𝑦 0− − 𝑦′ 0− + 2 𝑠𝑌 𝑠 − 𝑦 0− + 10𝑌 𝑠 = 1 (The resulting equation)
• 𝑠2𝑌 𝑠 − 𝑠. 0 − 1 + 2 𝑠𝑌 𝑠 − 0 + 10𝑌 𝑠 = 1 (After putting the initial condition)
⇔ 𝑠2𝑌 𝑠 − 1 + 2𝑠𝑌 𝑠 + 10𝑌 𝑠 = 1
- Step_3: Solve for the output variable 𝑌 𝑠 .
• 𝑌 𝑠 𝑠2 + 2𝑠 + 10 = 2
⇒ 𝑌 𝑠 =2
𝑠2+2𝑠+10
- Step_4: Get result from the Laplace Transform Tables.
• As the above result is not in the tables, let use the Inverse Laplace Transform.
Hence:
𝑌 𝑠 =2
𝑠2+2𝑠+10⇔ 𝑌 𝑠 =
2
𝑠+1 2+9=
2
𝑠+1 2+32
11/10/2021 36

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
From : 𝑌 𝑠 =2
𝑠+1 2+9=
2
𝑠+1 2+32
⇒ 𝑌 𝑠 =2
3
3
𝑠+1 2+32
We then use the table to determine the solution and finally get:
𝑦 𝑡 =2
3𝑒−𝑡𝑠𝑖𝑛 3𝑡
Try…- Find the response 𝑥 𝑡 for the following differential equations:
1) 𝑥 + 3 𝑥 + 2𝑥 = 0 with the following initial conditions: 𝑥 0 = 𝑎, 𝑥 0 = 𝑏
2) 𝑥 + 2 𝑥 + 5𝑥 = 3 with the following initial conditions: 𝑥 0 = 𝑎, 𝑥 0 = 𝑏
11/10/2021 37

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
CHAP_2. 3: Transfer Function
11/10/2021 38

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
2.3. Transfer Function (TF)A. Overview
• Commonly used to characterize the input—output relationships of components or systems that can be described by linear and time-invariant differential equations.
• It is defined as “the ratio of the Laplace Transform of the output(response function) to the Laplace Transform of the input (driving function) under the assumption that all initial conditions are zero”
𝑺𝒚𝒔𝒕𝒆𝒎Input Output
𝑟 𝑡 𝑐 𝑡𝒂
𝑺𝒖𝒃𝒚𝒔𝒕𝒆𝒎Input Output
𝑟 𝑡 𝑐 𝑡𝒃
𝑺𝒖𝒃𝒚𝒔𝒕𝒆𝒎 𝑺𝒖𝒃𝒚𝒔𝒕𝒆𝒎
With:• 𝑟 𝑡 ≡ 𝑟𝑒𝑓𝑒𝑟𝑒𝑛𝑐𝑒 𝑖𝑛𝑝𝑢𝑡• 𝑐 𝑡 ≡ 𝑐𝑜𝑛𝑡𝑟𝑜𝑙𝑙𝑒𝑑 𝑣𝑎𝑟𝑖𝑎𝑏𝑙𝑒
11/10/2021 39

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Overview (Cont’d)• A general form of the differential equation for Linear and Time
Invariant System (LTI-System) with an input 𝑟 𝑡 and output 𝑐 𝑡 is given by:
𝑎𝑛𝑑𝑛𝑐 𝑡
𝑑𝑡𝑛 + 𝑎𝑛−1𝑑𝑛−1𝑐 𝑡
𝑑𝑡𝑛−1 + ⋯ + 𝑎0𝑐 𝑡 = 𝑏𝑚𝑑𝑚𝑟 𝑡
𝑑𝑡𝑚 + 𝑏𝑚−1𝑑𝑚−1𝑟 𝑡
𝑑𝑡𝑚−1 + ⋯ + 𝑏0𝑟 𝑡
• The Transfer Function of this system is obtained by taking the Laplace transforms of both sides of Equation (assuming zero initial conditions),
𝑎𝑛𝑠𝑛𝐶 𝑠 + 𝑎𝑛−1𝑠𝑛−1𝐶 𝑠 + ⋯ + 𝑎0𝐶 𝑠 = 𝑏𝑚𝑠𝑚𝑅 𝑠 + 𝑏𝑚−1𝑠𝑚−1𝑅 𝑠 + ⋯ + 𝑏0𝑅 𝑠
𝑎𝑛𝑠𝑛 + 𝑎𝑛−1𝑠𝑛−1 + ⋯ + 𝑎0 𝐶 𝑠 = 𝑏𝑚𝑠𝑚 + 𝑏𝑚−1𝑠𝑚−1 + ⋯ + 𝑏0 𝑅 𝑠
𝐶 𝑠
𝑅 𝑠=
𝑏𝑚𝑠𝑚+𝑏𝑚−1𝑠𝑚−1+⋯+𝑏0
𝑎𝑛𝑠𝑛+𝑎𝑛−1𝑠𝑛−1+⋯+𝑎0= 𝐺 𝑠 •The equation 𝑮 𝒔 is called
Transfer Function (TF).
11/10/2021 40

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Three (3) steps to obtain manually the Transfer Function:1. Write the differential equation for the system.2. Take the Laplace transform of the differential equation,
assuming all initial conditions are zeros.3. Take the ratio of the output 𝐶 𝑠 to the input 𝑅 𝑠 .
This ratio is the transfer function.
The key advantage of Transfer Functions is that: they allow engineers to use simple algebraic equations instead of
complex differential equations for analyzing and designing systems.
A. 1. To obtain Transfer Function Manually
11/10/2021 41

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
From the given differential equations, find the Transfer Function represented by 𝑐 𝑡 , to an input 𝑟 𝑡 :
a)𝑑𝑐 𝑡
𝑑𝑡+ 2𝑐 𝑡 = 𝑟 𝑡
b) 𝑐 + 3 𝑐 + 𝑐 = 𝑟 𝑡
Solution:
a)𝑑𝑐 𝑡
𝑑𝑡+ 2𝑐 𝑡 = 𝑟 𝑡
• Taking the Laplace Transform:
𝑠𝐶 𝑠 + 2𝐶 𝑠 = 𝑅 𝑠
• The Transfer Function 𝐺 𝑠 , is:
𝐺 𝑠 =𝐶 𝑠
𝑅 𝑠=
1
𝑠+2
Example
11/10/2021 42
b) 𝑐 + 3 𝑐 + 2𝑐 = 𝑟 𝑡
• Taking the Laplace Transform:
𝑠2𝐶 𝑠 + 3s𝐶 𝑠 + 𝐶 𝑠 = 𝑅 𝑠
• The Transfer Function 𝐺 𝑠 , is:
𝐺 𝑠 =𝐶 𝑠
𝑅 𝑠=
1
𝑠2+3𝑠+1

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
From the given differential equations, find the Transfer Function represented by 𝑐 𝑡 , to an input 𝑟 𝑡 :
a) 5𝑑2𝑐 𝑡
𝑑𝑡2 − 3𝑐 𝑡 = 2𝑟 𝑡
b) 𝑥 + 2 𝑥 + 5𝑥 = 3𝑟 𝑡
Try…
11/10/2021 43

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
A. 2. To obtain Transfer Function with MatLab Two (2) steps to obtain the Transfer Function:
1. Define the coefficients of the differential equation in descending power as :o input signal coefficients as numerator coefficients ,o output signal coefficients as denominator coefficients
2. Use the ′𝒕𝒇′ command to generate the Transfer Function (TF);
Syntax:
𝐺 𝑆 = 𝑡𝑓 𝑛𝑢𝑚𝑒𝑟𝑎𝑡𝑜𝑟 𝑐𝑜𝑓𝑓𝑖𝑐𝑖𝑒𝑛𝑡𝑠 , 𝑑𝑒𝑛𝑜𝑚𝑖𝑛𝑎𝑡𝑜𝑟 𝑐𝑜𝑒𝑓𝑓𝑖𝑐𝑖𝑒𝑛𝑡𝑠
Example: 5𝑑4𝑦
𝑑𝑡4 − 4𝑑2𝑦
𝑑𝑡2 + 10𝑦 = 20𝑑𝑢
𝑑𝑡+ 4𝑢
Solution: -Step_1: Coefficient definition.
o Numerator: 𝑁 = 20 4o Denominator: 𝐷 = 5 0 − 4 10
-Step_2: ′𝒕𝒇′ command in Matlab.
o 𝐺 = 𝑡𝑓 20 4 , 5 0 − 4 10= 𝑡𝑓 𝑁, 𝐷
o Answer: 𝐺 =20𝑠+4
5𝑠^3−4𝑠+10
11/10/2021 44

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
• Use MATLAB to extract the Transfer Function represented by the following equations:
1.𝑑𝑐 𝑡
𝑑𝑡+ 2𝑐 𝑡 = 𝑟 𝑡
2. 5𝑑2𝑐 𝑡
𝑑𝑡2 − 3𝑐 𝑡 = 2𝑟 𝑡
Try…
11/10/2021 45

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
B. Open-Loop Transfer Function (OLTF)
OLTF can be represented using a block diagram:
𝑅 𝑠 𝐶 𝑠
𝑅 𝑠 𝐶 𝑠
Where:
𝐶 𝑠 = 𝐺 𝑠 𝑅 𝑠 or G 𝑠 =𝐶 𝑠
𝑅 𝑠
NOTE: G 𝑠 =𝐶 𝑠
𝑅 𝑠≡ Open-Loop Transfer Function.
𝐺 𝑠
𝑏𝑚𝑠𝑚 + 𝑏𝑚−1𝑠𝑚−1 + ⋯ + 𝑏0
𝑎𝑛𝑠𝑛 + 𝑎𝑛−1𝑠𝑛−1 + ⋯ + 𝑎0
11/10/2021 46

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
B. Closed-Loop Transfer Function (CLTF)
CLTF can be represented using a block diagram:
𝑅 𝑠 + E 𝑠 𝐶 𝑠
∓
Thus: 𝐸 𝑠 = R 𝑠 − 𝐻 𝑠 𝐶 𝑠 (eq.1) and 𝐶 𝑠 = G 𝑠 𝐸 𝑠 (eq.2)
eq.1 into eq.2: 𝐶 𝑠 = G 𝑠 [R 𝑠 − 𝐻 𝑠 𝐶 𝑠 ] (eq.3)
Re-arranging the eq.3 yields to:
𝐶 𝑠
𝑅 𝑠=
𝐺 𝑠
1±𝐺 𝑠 𝐻 𝑠≡ Closed-Loop Transfer Function.
𝐺 𝑠
𝐻 𝑠
Plant and Controller
Output
Feedback
Input Actuating signal (error)
11/10/2021 47

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Feedback and its Effects Why Feedback?
• Feedback is a key tool that can be used to modify the behaviorof a system.
• This behavior altering effect of feedback is a key mechanism that control engineers exploit deliberately to achieve the objective of acting on a system to ensure that the desired performance specifications are achieved.
Feedback Effects.
• To reduce the error between the input and output of the system.
• It effects the system performance characteristics such as stability, overall system gain, sensitivity and bandwidth.
11/10/2021 48

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
o Feedback Effects on:
i. system sensitivity:
• It can make the system’s response less sensitive to externaldisturbances, parameter changes and noise
ii. system stability:
• An unstable system can be stabilized using feedback
• Stability refers to the ability of a system to follow its input signal
• A system that can’t control its output, or its output increases infinitely is an unstable system
• Adding feedback may also cause instability to an already stable system
11/10/2021 49

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
o Feedback Effects on (Cont’d)
iii. system gain:
• Feedback influences the system’s Transfer Function and consequently, the overall system gain:
• Thus, the system’s gain can be obtained by finding the magnitude of the system’s Transfer Function:
a) The system gain for OLCS: 𝐶 𝑠
𝑅 𝑠= 𝐺 𝑠
b) The system gain for CLCS: 𝐶 𝑠
𝑅 𝑠=
𝐺 𝑠
1+𝐺 𝑠 𝐻 𝑠
Effects of the product 𝐺 𝑠 𝐻 𝑠 :
– If 𝐺 𝑠 𝐻 𝑠 is negative;
𝐶 𝑠
𝑅 𝑠> 𝐺 𝑠 and we have positive feedback.
11/10/2021 50

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Effects of the product 𝐺 𝑠 𝐻 𝑠 (Cont’d):
– If 𝐺 𝑠 𝐻 𝑠 is positive;
𝐶 𝑠
𝑅 𝑠< 𝐺 𝑠 and we have negative feedback.
o If 𝐺 𝑠 𝐻 𝑠 is positive and 𝐺 𝑠 𝐻 𝑠 ≫ 1;
𝐶 𝑠
𝑅 𝑠≈
𝐺 𝑠
𝐺 𝑠 𝐻 𝑠=
1
𝐻 𝑠
The gain is independent of the gain of the forward path 𝐺 𝑠 .
Depending on whether the feedback is positive + or negative − , the system gain of a Closed-Loop Control System (CLCS) can be increased or decreased.
11/10/2021 51

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
o Feedback Effects on (cont’d)
iv. system bandwidth:
• The system bandwidth increases as the gain is reduced with feedback;
• in some cases the gain × bandwidth = constant
11/10/2021 52

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
CHAP_2. 4: Block Diagram Models
11/10/2021 53

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
2.4 Block Diagram ModelsA. Overview
• A block diagram of a system is a pictorial representation of the functions performed by each component and of the flow of signals.
– Such diagram depicts the interrelationships that exist among the various components.
– Differing from a purely abstract mathematical representation, a block diagram has the advantage of indicating more realistically the signal flows of the actual system.
• Transfer function can be represented as a block diagram:
𝑏𝑚𝑠𝑚 + 𝑏𝑚−1𝑠𝑚−1 + ⋯ + 𝑏0
𝑎𝑛𝑠𝑛 + 𝑎𝑛−1𝑠𝑛−1 + ⋯ + 𝑎0
𝑅 𝑠 𝐶 𝑠
11/10/2021 54

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Components of a Block Diagram for a LTI system
a) Signals
𝑅 𝑠 𝐶 𝑠
b) System
𝐺 𝑠𝑅 𝑠 𝐶 𝑠
Input Output
−
c) Summing Junction
𝑅1 𝑠 +
𝑅2 𝑠𝑅3 𝑠
𝐶 𝑠 = 𝑅1 𝑠 + 𝑅2 𝑠 − 𝑅3 𝑠
+
d) Pickoff point
𝑅 𝑠 𝑅 𝑠
𝑅 𝑠
𝑅 𝑠
11/10/2021 55

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Four (4) steps for drawing Block Diagram:
1) Write the equations that describe the dynamic behavior for each component.
2) Take Laplace Transform of these equations, assuming zero initial conditions.
3) Represent each Laplace-transformed equation individually in block form.
4) Assembly the elements into a complete block diagram.
Procedures for drawing Block Diagram
11/10/2021 56

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Blocks of Block diagram can be connected in three basic forms:
1) Cascade:
2) Parallel
3) Feedback
Basic Forms of Block Diagram Blocks
𝐺2 𝑠𝐺1 𝑠 𝐺3 𝑠𝑅 𝑠 𝑋2 𝑠𝑋1 𝑠 𝐶 𝑠
𝐺1 𝑠𝑋1 𝑠
𝑅 𝑠𝐺2 𝑠
𝐺3 𝑠
𝑋2 𝑠
𝑋3 𝑠
𝐶 𝑠±±
±
𝑅 𝑠𝐺 𝑠
𝐻 𝑠
𝐸 𝑠 𝐶 𝑠
𝑋 𝑠∓
11/10/2021 57

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
B. Block Diagram Algebra
Simplify block diagrams into simpler, recognizable forms;
In order to determine the equivalent transfer function.
1. Simplify to instances of the three standard forms;
then simplify those forms
2. Move blocks around relative to summing junctions and pickoff points;
simplify to a standard form:
i. Move blocks forward/backward past summing junctions
ii. Move blocks forward/backward past pickoff points
11/10/2021 58

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Rules for Reduction of Block Diagrams
1. Any number of cascaded blocks can be reduced by a single block representing transfer function being a product of transfer functions of all cascaded blocks.
𝐺1 𝑠𝑅 𝑠
𝐺2 𝑠 𝐺3 𝑠
𝑋1 𝑠= 𝐺1 𝑆 𝑅 𝑠
𝑋2 𝑠= 𝐺2 𝑠 𝐺1 𝑆 𝑅 𝑠
𝐶 𝑠= 𝐺3 𝑠 𝐺2 𝑠 𝐺1 𝑆 𝑅 𝑠
𝒂
𝑮𝟑 𝒔 𝑮𝟐 𝒔 𝑮𝟏 𝑺𝑅 𝑠 𝐶 𝑠
𝒃
11/10/2021 59

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
•Rules for reduction of the block diagram (Cont’d):
2. Equivalent Transfer Function for parallel substations.
𝐺1 𝑠𝑋1 𝑠 = 𝑅 𝑠 𝐺1 𝑠
𝑅 𝑠𝐺2 𝑠
𝐺3 𝑠
𝑋2 𝑠 = 𝑅 𝑠 𝐺2 𝑠
𝑋3 𝑠 = 𝑅 𝑠 𝐺3 𝑠
𝐶 𝑠= ±𝐺1 𝑠 ±𝐺2 𝑠 ± 𝐺3 𝑆 𝑅 𝑠
±±
±
±𝑮𝟏 𝒔 ±𝑮𝟐 𝒔 ± 𝑮𝟑 𝑺𝑅 𝑠 𝐶 𝑠
𝒃
𝒂
11/10/2021 60

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
•Rules for reduction of the block diagram (Cont’d):
3. Equivalent Transfer Function for substations with feedback.
𝐺 𝑠
1 ± 𝐺 𝑠 𝐻 𝑠
𝑅 𝑠 𝐶 𝑠
𝒃
𝒂
𝑅 𝑠𝐺 𝑠
𝐻 𝑠
𝐸 𝑠 𝐶 𝑠
𝑋 𝑠
∓
11/10/2021 61

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
•Rules for Reduction of Block Diagrams (Cont’d):
4. Moving Blocks/a Summing Junction.
𝑋 𝑠
∓
+ 𝐶 𝑠≡𝐺 𝑠
𝑅 𝑠
𝑋 𝑠
∓
+𝐺 𝑠
𝑅 𝑠
𝐺 𝑠
𝐺 𝑠𝐶 𝑠 𝑅 𝑠 𝐶 𝑠
𝒂 Back Past a Summing Junction/Behind the Block
𝒃 Forward Past a Summing Junction/Ahead of the Block
𝑋 𝑠
≡∓
+
∓
+
1
𝐺 𝑠
𝐺 𝑠𝐶 𝑠𝑅 𝑠
𝑋 𝑠
11/10/2021 62

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
•Rules for reduction of the block diagram (Cont’d):
5. Moving Blocks/a Pickoff Point.
𝑅 𝑠
𝑅 𝑠
𝑅 𝑠 𝐺 𝑠
≡𝐺 𝑠𝑅 𝑠
𝐺 𝑠
𝑅 𝑠 1
𝐺 𝑠𝐺 𝑠
𝑅 𝑠 𝐺 𝑠
𝑅 𝑠 𝑅 𝑠
𝒂 Backward Past Pickoff Point/Behind the Block
𝒃 Forward Past Pickoff Point/Ahead of the Block
≡
𝐺 𝑠𝑅 𝑠 𝐺 𝑠
𝑅 𝑠
𝑅 𝑠 𝐺 𝑠
1
𝐺 𝑠
𝑅 𝑠
𝑅 𝑠 𝐺 𝑠
𝑅 𝑠 𝐺 𝑠
𝐺 𝑠
𝐺 𝑠
𝑅 𝑠 𝐺 𝑠
𝑅 𝑠 𝐺 𝑠
11/10/2021 63

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Three (3) tips for calculating the Equivalent Transfer Function of reduced Block Diagrams:
1) The Numerator of the closed-loop Transfer Function 𝐶 𝑠 𝑅 𝑠 is the product of the transfer functions of the
feed forward path.
2) The denominator of the closed-loop transfer function 𝐶 𝑠 𝑅 𝑠 is equal to:
1 − 𝑝𝑟𝑜𝑑𝑢𝑐𝑡 𝑜𝑓 𝑡ℎ𝑒 𝑇𝑟𝑎𝑛𝑠𝑓𝑒𝑟 𝐹𝑢𝑛𝑐𝑡𝑖𝑜𝑛𝑠 𝑎𝑟𝑜𝑢𝑛𝑑 𝑒𝑎𝑐ℎ 𝑙𝑜𝑜𝑝
3) The positive feedback loop yields a negative term in the denominator.
Conclusion of Block Diagram Reduction Techniques
11/10/2021 64

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Example_1• Reduce the following block diagram
11/10/2021 65

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Working…
1) Moving the summing point ahead of 𝐺1, we have:
11/10/2021 66

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Working…
2) Combining 𝐺1 and 𝐺2 in Cascade, we get:
11/10/2021 67

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Working…
3) Eliminating the feedback loop 𝐺1, 𝐺2 and 𝐻1, we get:
11/10/2021 68

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Working…
4) Combing the two blocks in Cascade, we get
11/10/2021 69

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Working…
5) Similarly eliminating the second feedback loop, we get:
11/10/2021 70

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Working…
6) Similarly eliminating the third feedback loop, we get:
11/10/2021 71

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Working…
7) Finally, the system is reduced to the following block diagram:
11/10/2021 72

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Example_2• Deduce the response 𝒀 𝒔 of the following control system with two
inputs 𝑅 𝑠 and 𝐷 𝑠 .
• Solution:
a) Find:
- Step_1: 𝑌1 𝑠 𝐷 𝑠 when 𝑅 𝑠 = 0
𝑌1 𝑠
𝐷 𝑠 𝑅 𝑠 =0=
𝐺2
1+𝐺2 𝐻1−𝐻2
- Step_2: 𝑌2 𝑠 𝑅 𝑠 when 𝐷 𝑠 = 0
𝑌2 𝑠
𝑅 𝑠 𝐷 𝑠 =0=
𝐺1𝐺2
1+𝐺2 𝐻1−𝐻2
b) The total response 𝑌 𝑠 when 𝑅 𝑠and 𝐷 𝑠 are zeros is:
𝑌 𝑠 = 𝑌1 𝑠 + 𝑌2 𝑠
= 𝑌1 𝑠
𝐷 𝑠 𝑅 𝑠 =0∙ 𝐷 𝑠 +
𝑌2 𝑠
𝑅 𝑠 𝐷 𝑠 =0∙ 𝑅 𝑠
=𝐺2
1+𝐺2 𝐻1−𝐻2𝐷 𝑠 +
𝐺1𝐺2
1+𝐺2 𝐻1−𝐻2𝑅 𝑠
11/10/2021 73

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
C. Signal Flow Graphs
Alternative method to block diagram representation, developed by Samuel Jefferson Mason.
They provide graphical description of systems.
Advantage:
the availability of a flow graph gain formula, also calledMason’s gain formula.
A signal flow graph consists of a network in which nodesare connected by directed branches.
It depicts the flow of signals from one point of a system to another and gives the relationships among the signals.
11/10/2021 74

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Components of Signal Flow Graphs
Signal flow graphs consist of:
1) Nodes –represent signals
Nodes (sometimes) labeled with signal names
2) Branches –represent system blocks
Branches labeled with system transfer functions
Unidirectional line segment joining two nodes.
4) Path: a branch or continuous sequence of branches.
5) Arrows indicate signal flow direction
6) Implicit summation at nodes:
Always a positive sum
Negative signs associated with branch transfer functions
11/10/2021 75

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Four (4) steps:
1) Identify and label all signals on the block diagram
2) Place a node for each signal
3) Connect nodes with branches in place of the blocks;
Maintain correct direction
Label branches with corresponding transfer functions
Negate transfer functions as necessary to provide negativefeedback
4) If desired, simplify where possible.
Conversion Procedures from a Block
Diagram to a Signal Flow Graph
11/10/2021 76

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Example_1• Convert the following block diagram to a signal flow graph
• Solution:
Step_1:
- Identify and Label any unlabeled signals.
Step_2:
- Place a node for each signal.
𝑹 𝒔 𝑿𝟏 𝒔 𝑬 𝒔 𝑼 𝒔𝒀 𝒔
𝑿𝟐 𝒔
11/10/2021 77

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Solution (Cont’d)Step_3:
- Connect nodes with branches, each representing a system block
Note: the −1 to provide negative feedback of 𝑿𝟐 𝒔
Step_4:
- To simplify, intermediate nodes with a single input and single output can be eliminated, if desired:
This makes sense for 𝑋1 𝑠 and 𝑋2 𝑠
Leave 𝑈 𝑠 to indicate separation between controller and plant.
𝑹 𝒔 𝑿𝟏 𝒔 𝑬 𝒔 𝑼 𝒔 𝒀 𝒔
𝑿𝟐 𝒔−𝟏
𝑯𝟏 𝒔 𝟏 𝑫 𝒔 𝑮 𝒔
𝑯𝟐 𝒔
𝑹 𝒔 𝑬 𝒔 𝑼 𝒔 𝒀 𝒔𝑯𝟏 𝒔 𝑫 𝒔 𝑮 𝒔
−𝑯𝟐 𝒔
11/10/2021 78

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Example_2• Convert the following block diagram to a signal flow graph
• Solution:
Step_1: Label all signals, then place a node for each
11/10/2021 79

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Solution (Cont’d)Step_3: Connect nodes with branches, each representing a system block
Step_4: Simplify – eliminate 𝑋5 𝑠 , 𝑋6 𝑠 and 𝑋7 𝑠
11/10/2021 80

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Try…• Convert the following block diagram to a signal flow graph
2
1 2
11/10/2021 81

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
D. Mason’s Rule (Mason, 1953)
The block diagram reduction technique requiressuccessive application of fundamental relationships in order to arrive at the system transfer function.
On the other hand, Mason’s rule for reducing a signal-flow graph to a single transfer function requires the application of one formula.
The formula was derived by S. J. Mason when he related the signal-flow graph to the simultaneous equations that can be written from the graph.
Before presenting the Mason’s rule formula, we need to define some terminology:
11/10/2021 82

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Mason’s Rule: Terminology Loop: a closed path that originates and terminates on the
same node.
Non-touching loops: loops that do not have any nodes in common.
Loop gain: Total gain (product of individual gains) around any path in the signal flow graph.
Beginning and ending at the same node.
Not passing through any node more than once.
Forward path gain: gain along any path from the input to the output.
Not passing through any node more than once.
Non‐touching loop gains: the product of loop gains from non‐touching loops, taken two, three, four, or more at a time.
11/10/2021 83

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
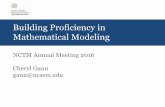
Mason’s Rule: Illustration of Terminology From the following signal flow graph, let get:
1) The loop gain:
3 loops with gains: −𝐺1 𝑠 𝐻3 𝑠 ,
𝐺2 𝑠 𝐻1 𝑠 , and
−𝐺2 𝑠 𝐺3 𝑠 𝐻2 𝑠
2) Forward path gain:
2 forward paths with gains: 𝐺1 𝑠 𝐺2 𝑠 𝐺3 𝑠 𝐺4 𝑠
𝐺1 𝑠 𝐺2 𝑠 𝐺5 𝑠
3) Non-touching loop gains:
2 pairs of non-touching loops with gains: −𝐺1 𝑠 𝐻3 𝑠 ∙ 𝐺2 𝑠 𝐻1 𝑠
−𝐺1 𝑠 𝐻3 𝑠 ∙ −𝐺2 𝑠 𝐺3 𝑠 𝐻2 𝑠
11/10/2021 84

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
The Transfer Function, 𝐶 𝑠 𝑅 𝑠 , of a system representedby a signal-flow graph is:
𝐶 𝑠
𝑅 𝑠=
𝑖=1𝑛 𝑃𝑖∆𝑖
∆
Where: • 𝑛 = number of forward paths• 𝑃𝑖 = the 𝑖𝑡ℎ forward path gain• ∆= determinant of the System• ∆𝑖= determinant of the 𝑖𝑡ℎ forward path
∆ is called the signal flow graph determinant or characteristic function since ∆= 0 is the system characteristic equation.
Mason’s Rule
11/10/2021 85

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
• ∆= 1 − 𝑙𝑜𝑜𝑝 𝑔𝑎𝑖𝑛𝑠
+ 𝑛𝑜𝑛 − 𝑡𝑜𝑢𝑐ℎ𝑖𝑛𝑔 𝑙𝑜𝑜𝑝 𝑔𝑎𝑖𝑛𝑠 𝑡𝑎𝑘𝑒𝑛 2 𝑎𝑡 𝑎 𝑡𝑖𝑚𝑒
− 𝑛𝑜𝑛 − 𝑡𝑜𝑢𝑐ℎ𝑖𝑛𝑔 𝑙𝑜𝑜𝑝 𝑔𝑎𝑖𝑛𝑠 𝑡𝑎𝑘𝑒𝑛 3 𝑎𝑡 𝑎 𝑡𝑖𝑚𝑒
+ 𝑛𝑜𝑛 − 𝑡𝑜𝑢𝑐ℎ𝑖𝑛𝑔 𝑙𝑜𝑜𝑝 𝑔𝑎𝑖𝑛𝑠 𝑡𝑎𝑘𝑒𝑛 4 𝑎𝑡 𝑎 𝑡𝑖𝑚𝑒
− ⋯
• ∆𝑖= ∆ − 𝑙𝑜𝑜𝑝 𝑔𝑎𝑖𝑛 𝑡𝑒𝑟𝑚𝑠 𝑖𝑛 ∆ 𝒕𝒉𝒂𝒕 𝒕𝒐𝒖𝒄𝒉 𝑡ℎ𝑒 𝑖𝑡ℎ 𝑓𝑜𝑟𝑤𝑎𝑟𝑑 𝑝𝑎𝑡ℎ
= 𝑙𝑜𝑜𝑝 𝑔𝑎𝑖𝑛 𝑡𝑒𝑟𝑚𝑠 𝑖𝑛 ∆ 𝒕𝒉𝒂𝒕 𝒏𝒐𝒕 𝒕𝒐𝒖𝒄𝒉𝒊𝒏𝒈 𝑡ℎ𝑒 𝑖𝑡ℎ 𝑓𝑜𝑟𝑤𝑎𝑟𝑑 𝑝𝑎𝑡ℎ
Note: ∆𝑖= 1 if there are no non-touching loops to the 𝑖𝑡ℎ path.
Mason’s Rule (Cont’d)
11/10/2021 86

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Seven (7) steps:
1) Calculate forward path gain 𝑃𝑖 for each forward path 𝑖.
2) Calculate all loop Transfer Functions
3) Consider non-touching loop gains (NTLGs) taken 2 at a time
4) Consider non-touching loop gains (NTLGs) taken 3 at a time
5) Etc.
6) Calculate ∆ from steps 2, 3, 4 and 5.
7) Calculate ∆𝒊 as portion of ∆ that not touching the forward path 𝒊.
Mason’s Rule Systematic Approach
11/10/2021 87

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Example Apply Mason’s Rule to calculate the transfer function of the system
represented by the following Signal Flow Graph.
Solution:
11/10/2021 88
Step_1: Get the forward path gain 𝑃𝑖 for
each forward path 𝒊:
•Number of forward paths is 2
•Forward path gains: 𝑃1 = 𝐺1𝐺2𝐺3𝐺4
𝑃2 = 𝐺1𝐺2𝐺5
Step_2: Get the 𝑙𝑜𝑜𝑝 𝑔𝑎𝑖𝑛𝑠
•Number of loops with gains is 3
• 𝑙𝑜𝑜𝑝 𝑔𝑎𝑖𝑛𝑠 = −𝐺1𝐻3 + 𝐺2𝐻1 − 𝐺2𝐺3𝐻2
Step_3: Get the 𝑁𝑇𝐿𝐺𝑠 2 @ 𝑡𝑖𝑚𝑒
each forward path 𝒊:
•Number of NTLs is 2 pairs
• 𝑁𝑇𝐿𝐺𝑠 = −𝐺1𝐻3𝐺2𝐻1
+ 𝐺1𝐻3𝐺2𝐺3𝐻2
Step_4: Get ∆:
•∆= 1 − −𝐺1𝐻3 + 𝐺2𝐻1 − 𝐺2𝐺3𝐻2
+ −𝐺1𝐻3𝐺2𝐻1 + 𝐺1𝐻3𝐺2𝐺3𝐻2

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Solution (Cont’d)Step_5: Get ∆𝑖:
• ∆𝑖= ∆ − 𝑙𝑜𝑜𝑝 𝑔𝑎𝑖𝑛 𝑡𝑒𝑟𝑚𝑠 𝑖𝑛 ∆ 𝒕𝒉𝒂𝒕 𝒕𝒐𝒖𝒄𝒉 𝑡ℎ𝑒 𝑖𝑡ℎ 𝑓𝑜𝑟𝑤𝑎𝑟𝑑 𝑝𝑎𝑡ℎ
= 𝑙𝑜𝑜𝑝 𝑔𝑎𝑖𝑛 𝑡𝑒𝑟𝑚𝑠 𝑖𝑛 ∆ 𝒕𝒉𝒂𝒕 𝒏𝒐𝒕 𝒕𝒐𝒖𝒄𝒉𝒊𝒏𝒈 𝑡ℎ𝑒 𝑖𝑡ℎ 𝑓𝑜𝑟𝑤𝑎𝑟𝑑 𝑝𝑎𝑡ℎ
Thus:
11/10/2021 89
Note: Simplest way to find ∆𝑖 terms is to calculate ∆ with the 𝒊𝒕𝒉 path removed;
• Must remove nodes as well !!!
For 𝑖 = 1:
With forward path 1 removed, there are no loops, so:
∆1= ∆= 1 − 0 = 1
For 𝑖 = 2:
Similarly, removing forward path 2 leaves no loops, so:
∆2= ∆= 1 − 0 = 1
Finally:
𝑌 𝑠
𝑅 𝑠=
𝑖=1𝑛 𝑃𝑖∆𝑖
∆=
𝑃1∆1 + 𝑃2∆2
∆=
𝐺1𝐺2𝐺3𝐺4 + 𝐺1𝐺2𝐺5
1 + 𝐺1𝐻3 − 𝐺2𝐻1 + 𝐺2𝐺3𝐻2 − 𝐺1𝐻3𝐺2𝐻1 + 𝐺1𝐻3𝐺2𝐺3𝐻2

Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.
Try…• Apply Mason’s Rule to calculate the transfer function of the
system represented by the following Signal Flow Graph.
Solution:
11/10/2021 90

Thank You!!!
Any Questions?
10/11/2021 91Control System for Industrial Automation, Dept of Electrical Eng, Faculty of
Engineering Technology, UTHM. @ Dr. HIKMA Shabani.