![COURSE INFORMATION - sirnaksirnak.edu.tr/resimler/files/ects.pdf · Textbook [1] Balcı, Mustafa; Genel Matematik , Balcı Yayınlar ... COURSE INFORMATION Course Title Code Semester](https://static.fdocuments.us/doc/165x107/5a743ba67f8b9ad22a8bcbb2/course-information-textbook-1-balci-mustafa-genel-matematik-balci.jpg)
Chapter 16 Planar Kinematics of a Rigid Bodyw3.gazi.edu.tr/~ksoyluk/resimler/IM 224 Ch16.pdf · The...
23
Copyright © 2010 Pearson Education South Asia Pte Ltd Chapter 16 Planar Kinematics of a Rigid Body 1. Rigid-Body Motion 2. Translation 3. Rotation about a Fixed Axis 4. Absolute Motion Analysis 5. Relative-Motion Analysis: Velocity 6. Instantaneous Center of Zero Velocity 7. Relative-Motion Analysis: Acceleration 8. Relative-Motion Analysis Using Rotating Axis
Transcript of Chapter 16 Planar Kinematics of a Rigid Bodyw3.gazi.edu.tr/~ksoyluk/resimler/IM 224 Ch16.pdf · The...

Copyright © 2010 Pearson Education South Asia Pte Ltd
Chapter 16
Planar Kinematics of a Rigid Body
1. Rigid-Body Motion
2. Translation
3. Rotation about a Fixed Axis
4. Absolute Motion Analysis
5. Relative-Motion Analysis: Velocity
6. Instantaneous Center of Zero Velocity
7. Relative-Motion Analysis: Acceleration
8. Relative-Motion Analysis Using Rotating Axis

Copyright © 2010 Pearson Education South Asia Pte Ltd
16.1 Planar Rigid-Body Motion
When all the particles of a rigid body move along
paths which are equidistant from a fixed plane,
the body is undergoing planar motion.
3 types of rigid body planar motion:
1) Translation
This type of motion occurs when every line
segment on the body remains parallel to its
original orientation throughout the motion.

Copyright © 2010 Pearson Education South Asia Pte Ltd
16.1 Planar Rigid-Body Motion
1) Translation
Rectilinear translation - when two particles paths
of motion are along equidistant straight lines
Curvilinear translation - when paths of motion are
along curved lines are equidistant

Copyright © 2010 Pearson Education South Asia Pte Ltd
16.1 Planar Rigid-Body Motion
2) Rotation about a fixed axis
When a rigid body rotates about a fixed axis, all
the particles of the body, except on the axis of
rotation, move along circular paths.
3) General Plane Motion
When a body is subjected to general plane
motion, there is a combination of translation and
rotation.

Copyright © 2010 Pearson Education South Asia Pte Ltd
16.1 Planar Rigid-Body Motion

Copyright © 2010 Pearson Education South Asia Pte Ltd
16.2 Translation
Position
By vector addition,
Velocity
Since magnitude of rB/A is
constant due to rigid body,
Acceleration
Time derivative of velocity equation yields
The above two equations indicate that all points in a rigid
body subjected to either rectilinear or curvilinear translation
move with the same velocity and acceleration.
ABAB /rrr
AB vv
AB aa
Copyright © 2010 Pearson Education South Asia Pte Ltd
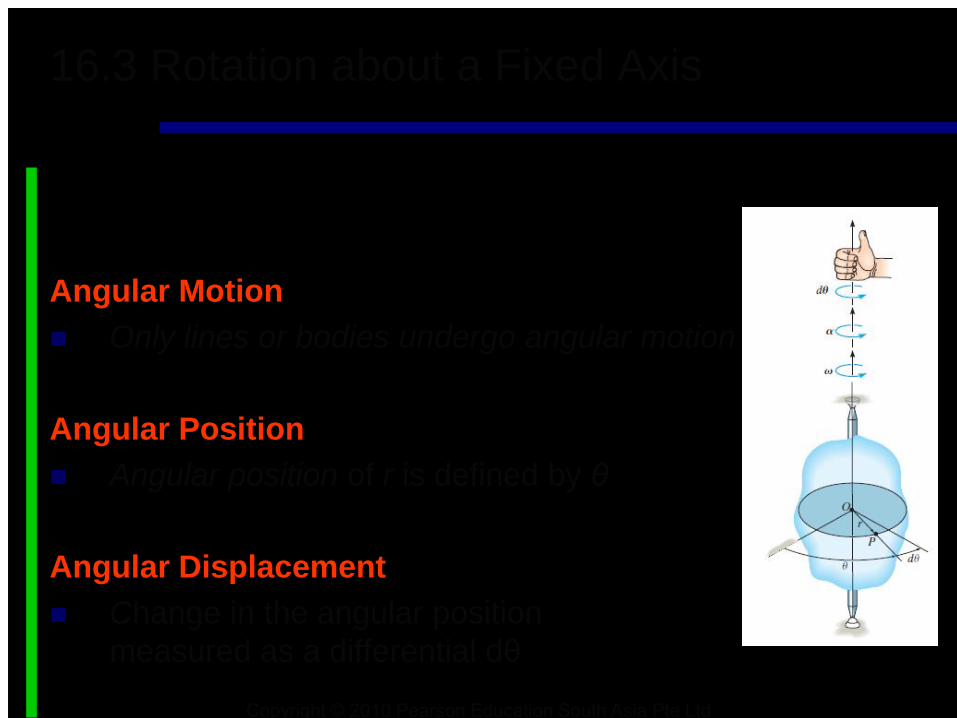
16.3 Rotation about a Fixed Axis
When a body rotates about a fixed axis, any point P located
in the body travels along a circular path.
Angular Motion
Only lines or bodies undergo angular motion
Angular Position
Angular position of r is defined by θ
Angular Displacement
Change in the angular position
measured as a differential dθ

Copyright © 2010 Pearson Education South Asia Pte Ltd
16.3 Rotation about a Fixed Axis
Angular Velocity
Time rate of change in the angular position
Since dθ occurs during an instant of time dt,
Angular Acceleration
Time rate of change of the
angular velocity
Magnitude of vector is
dt
d ( +)
( +) 2
2
dt
d
dt
d

Copyright © 2010 Pearson Education South Asia Pte Ltd
16.3 Rotation about a Fixed Axis
Angular Acceleration
Differential relation between the angular
acceleration, angular velocity and angular
displacement is
Constant Angular Acceleration
dd ( +)
)(2
2
1
020
2
200
0
c
c
c
tt
t
( +)
( +)
( +)

Copyright © 2010 Pearson Education South Asia Pte Ltd
16.3 Rotation about a Fixed Axis
Motion of Point P
Point P travels along a circular path of radius r
and center at point O
Position
P is defined by the position vector r
Velocity
The velocity of P is
By using the cross product,
rv
prv

Copyright © 2010 Pearson Education South Asia Pte Ltd
16.3 Rotation about a Fixed Axis
Acceleration
Acceleration of P can be expressed as
For acceleration in vector form,
Magnitude of acceleration is
rara nt
2 ;
rraaa2 nt
22tn aaa

Copyright © 2010 Pearson Education South Asia Pte Ltd
16.4 Absolute Motion Analysis
A body subjected to general plane motion
undergoes a simultaneous translation and
rotation
One way to define these motions is to use a
rectilinear position coordinate s to locate the
point along its path and an angular position
coordinate θ to specify the orientation of the line
By direct application of the time-differential
equations v = ds/dt, a = dv/dt, ω = dθ/dt, α =
dω/dt, the motion of the point and the angular
motion of the line can be related.

Copyright © 2010 Pearson Education South Asia Pte Ltd
The large window is opened using a hydraulic
cylinder AB. If the cylinder extends at a constant rate
of 0.5 m/s, determine the angular velocity and
angular acceleration of the window at the instant θ =
30°
Example 16.5

Copyright © 2010 Pearson Education South Asia Pte Ltd
Solution
Position Coordinate Equation
The angular motion of the window can be obtained
using the coordinate θ and motion along the
hydraulic cylinder is defined using a coordinate s.
When θ = 30°,
Example 16.5
cos45
cos)1)(2(2)1()2(
2
222
s
s
(1)
m239.1s

Copyright © 2010 Pearson Education South Asia Pte Ltd
Solution
Time Derivatives
Taking the time derivatives of Eq. 1,
Since vs = 0.5 m/s, then at θ = 30°
Example 16.5
)(sin2)(
)sin(402
svs
dt
d
dt
dss
(2)
rad/s620.0

Copyright © 2010 Pearson Education South Asia Pte Ltd
Solution
Time Derivatives
Taking the time derivatives of Eq. 2 yields,
Since as = dvs/dt = 0, then
Example 16.5
)(sin2)(cos2
)(sin2)(cos2
22
ss
ss
sav
dt
d
dt
d
dt
dvsv
dt
ds
2
22
rad/s415.0
30sin2)620.0(30cos20)5.0(

Copyright © 2010 Pearson Education South Asia Pte Ltd
16.5 Relative-Motion Analysis: Velocity
The general plane motion of a rigid body can be
a combination of translation and rotation
We use a relative-motion analysis involving two
sets of coordinate axes
x, y coordinate system has a known motion
The axes of this coordinate
system will only be allowed
to translate with respect to
the fixed frame

Copyright © 2010 Pearson Education South Asia Pte Ltd
16.5 Relative-Motion Analysis: Velocity
Position
Position vector rA specifies the location of the
“base point” A, and the rB/A locates point B with
respect to point A
By vector addition, the position of B is
Displacement
A and B undergo
displacements drA and drB
ABAB /rrr

Copyright © 2010 Pearson Education South Asia Pte Ltd
16.5 Relative-Motion Analysis: Velocity
Displacement
Due to the rotation about A, drB/A = rB/A dθ, and
the displacement of B is
ABAB ddd /rrr
due to rotation about A
due to translation about A
due to translation and rotation

Copyright © 2010 Pearson Education South Asia Pte Ltd
16.5 Relative-Motion Analysis: Velocity
Velocity
To determine the relationship between the
velocities of points A and B,
dt
d
dt
d
dt
d ABAB /rrr

Copyright © 2010 Pearson Education South Asia Pte Ltd
16.5 Relative-Motion Analysis: Velocity
Velocity
vB/A has a magnitude of vB/A = ωrB/A and a
direction which is perpendicular to rB/A
ABAB /vvv
Copyright © 2010 Pearson Education South Asia Pte Ltd
16.5 Relative-Motion Analysis: Velocity
Velocity
vB is determined by considering the entire body
to translate with a velocity of vA, and rotate about
A with an angular velocity ω
Vector addition of these two effects, applied to B,
yields vB
vB/A represents the effect of circular motion,
about A. It can be expressed by the cross
product
ABAB /rvv

Copyright © 2010 Pearson Education South Asia Pte Ltd
16.5 Relative-Motion Analysis: Velocity
Velocity
Point A on link AB must move along a horizontal
path, whereas point B moves on a circular path
The wheel rolls without slipping
where point A can be
selected at the ground