
Chapter 1 Microprocessors Based Systems. Introduction List of the devices with microprocessors...
27
Chapter 1 Chapter 1 Microprocessors Based Systems
-
Upload
mohamed-hucker -
Category
Documents
-
view
241 -
download
3
Transcript of Chapter 1 Microprocessors Based Systems. Introduction List of the devices with microprocessors...

Chapter 1Chapter 1
Microprocessors Based Systems

IntroductionIntroduction
• List of the devices with microprocessors– Pocket Calculators
– Digital Watches
– Automatic tellers
– Smart Telephones
– Compact Disk Players
– Home Security and Control devices
– Realistic video games
– Talking dolls and other toys
– VCRs
– Personal Computers
OBJECTIVEOBJECTIVE
• To understand the need of the Microprocessors
• To understand the hardware architecture of the Microprocessors.
• To be able to write the software for the hardware architecture.
• To be able to connect the other hardware with the Microprocessors.

SYSTEM BLOCK DIAGRAMSYSTEM BLOCK DIAGRAM
• What are the standard elements of the computer.– Memory– Timing– Input/Output device.
• Similarly Microprocessors should have these standard elements with it.
SYSTEM BLOCK DIAGRAMSYSTEM BLOCK DIAGRAM
• The other elements depending on the requirement of a particular application we may have:
• ADC/DAC• Interval Timers• Math Coprocessors,• Complex Interrupt circuitry• Speech Synthesizer• Video Display and Controllers
SYSTEM BLOCK DIAGRAMSYSTEM BLOCK DIAGRAM
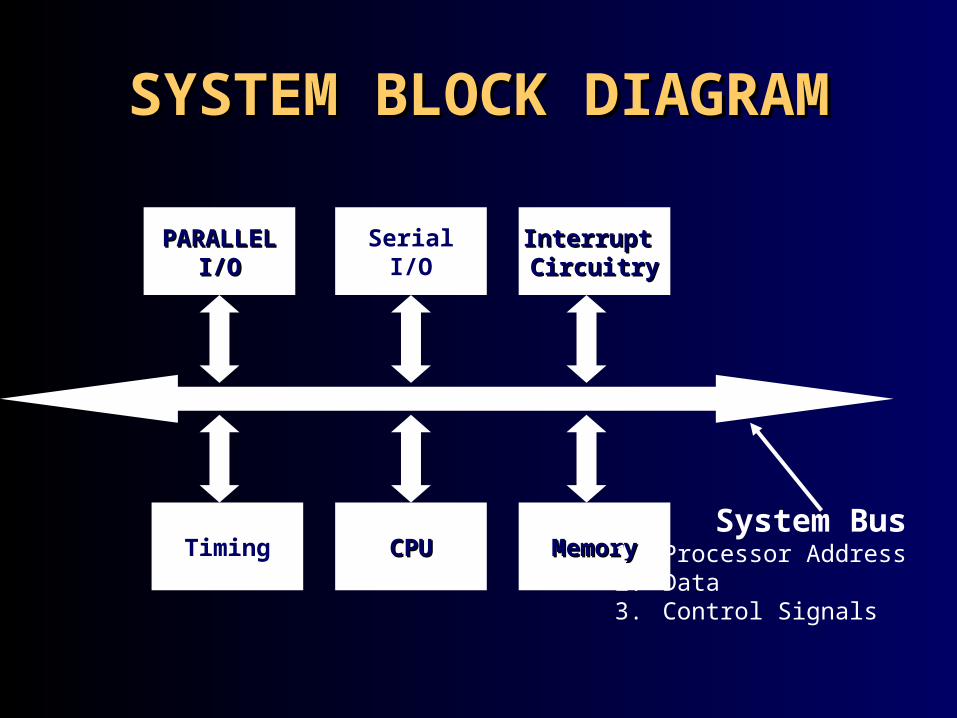
Timing CPUCPU MemoryMemory
PARALLELPARALLELI/OI/O
SerialI/O
Interrupt Interrupt CircuitryCircuitry
System Bus1. Processor Address2. Data3. Control Signals

SYSTEM BUSSYSTEM BUS
• Data Bus– The data consist of 8, 16, 32 bit or more parallel
lines. These lines are bidirectional i.e. they go from CPU to memory and vice versa. The data bus is connected in parallel to all the peripherals. The communication between the peripherals and CPU is activated by giving output enable pulse to the peripherals. The output of peripherals are floated when they are not in use.

SYSTEM BUSSYSTEM BUS
• Address Bus– It is a unidirectional bus. The address bus
consist of parallel signal lines. On these lines the CPU sends out the address of the memory location or I/O port that is to be written to or read from.
• Control Bus– They regulate the activity of the bus. The CPU
sends signals on the control bus to enable the output of the addressed memory devices or port devices.

SYSTEM BLOCK DIAGRAMSYSTEM BLOCK DIAGRAM• The CPU is the heart of the system
• It is responsible for executing the instructions that are stored in the memory section.
• For the future expansion the system bus is commonly made available to the outside world.
• The devices may be added later to this system bus as the need arises which is an easy interface.
• All the device communicate with the processor in the tightly coupled configuration.

TIMING SECTIONTIMING SECTION
• Synchronization
• Proper operation of all the system hardware.
• Consist of – Crystal oscillator – Timing circuitry.

MATH COPROCESSORSMATH COPROCESSORS
• They are microprocessors in themselves
• Instruction set consist of simply for:– transferring data – performing complex mathematical operations
• Advantages are:– Operations at higher clock frequency – Have great precision.
MEMORYMEMORY
• Volatile– Looses the information when the power is
switched off.• RAM• ROM
– Needed for initialization
• Non Volatile– Retain the information even after the power is
switched off.
Cache Memory

Memory HierarchyMemory Hierarchy
• Cache
• Secondary Cache
• Main Memory
• Secondary Memory
CommunicationCommunication
• Serial Communication– Slow in nature– Requires lesser number of lines– Only two wires and a ground wire is needed.
• Parallel Communication– Faster is nature.– Needs more number of lines
Microprocessor OperationMicroprocessor Operation
• Fetch
• Decode
• Execute
Difference Between the Assembly Difference Between the Assembly Language and High Level LanguageLanguage and High Level Language
• High level languages are abstract.
• Typically a single high level instruction is translated into several executable machine language instructions.
• Some early high level languages had a close correspondence between high level instructions and machine language instructions. For example, most of the early COBOL instructions translated into a very obvious and small set of machine instructions.
• The trend over time has been for high level languages to increase in abstraction.
• Modern object oriented programming languages are highly abstract (although, interestingly, some key object oriented programming constructs do translate into a very compact set of machine instructions).

Difference Between the Assembly Difference Between the Assembly Language and High Level LanguageLanguage and High Level Language
• Assembly languages are close to a one to one correspondence between symbolic instructions and executable machine codes.
• Assembly languages also include directives to the assembler, directives to the linker, directives for organizing data space, and macros.
• Macros can be used to combine several assembly language instructions into a high level language-like construct (as well as other purposes).
• There are cases where a symbolic instruction is translated into more than one machine instruction. But in general, symbolic assembly language instructions correspond to individual executable machine instructions.

Difference Between the Assembly Difference Between the Assembly Language and High Level LanguageLanguage and High Level Language
• Assembly language is much harder to program than high level languages.
• The programmer must pay attention to far more detail and must have an intimate knowledge of the processor in use.
• But high quality hand crafted assembly language programs can run much faster and use much less memory and other resources than a similar program written in a high level language.
• Speed increases of two to 20 times faster are fairly common, and increases of hundreds of times faster are occasionally possible.
• Assembly language programming also gives direct access to key machine features essential for implementing certain kinds of low level routines, such as an operating system kernel or microkernel, device drivers, and machine control.
Difference Between the Assembly Language and High Level Language
• High level programming languages are much easier for less skilled programmers to work in and for semi-technical managers to supervise.
• High level languages allow faster development times than work in assembly language, even with highly skilled programmers.
• Development time increases of 10 to 100 times faster are fairly common.
• Programs written in high level languages (especially object oriented programming languages) are much easier and less expensive to maintain than similar programs written in assembly language (and for a successful software project, the vast majority of the work and expense is in maintenance, not initial development).

Kinds of ProcessorsKinds of Processors• Complex Instruction Set Computers (CISC)
– have a large instruction set, with hardware support for a wide variety of operations. In scientific, engineering, and mathematical operations with hand coded assembly language (and some business applications with hand coded assembly language), CISC processors usually perform the most work in the shortest time.
• Reduced Instruction Set Computers (RISC) – have a small, compact instruction set. In most business applications and in
programs created by compilers from high level language source, RISC processors usually perform the most work in the shortest time.
• Hybrid processors – are some combination of CISC and RISC approaches, attempting to balance the
advantages of each approach.
• Special purpose processors – are optimized to perform specific functions. Digital signal processors and
various kinds of co-processors are the most common kinds of special purpose processors.
HARDWARE AND SOFTWARE HARDWARE AND SOFTWARE REQUIREMENTSREQUIREMENTS
• Why do we need ROM.
• Initialization peripherals
• Initializing the system on the start up
• Outputting the value of DAC
• Initializing video memory
• Setting up LEDs
• Memory to be tested on power on
• Watchdog Monitor
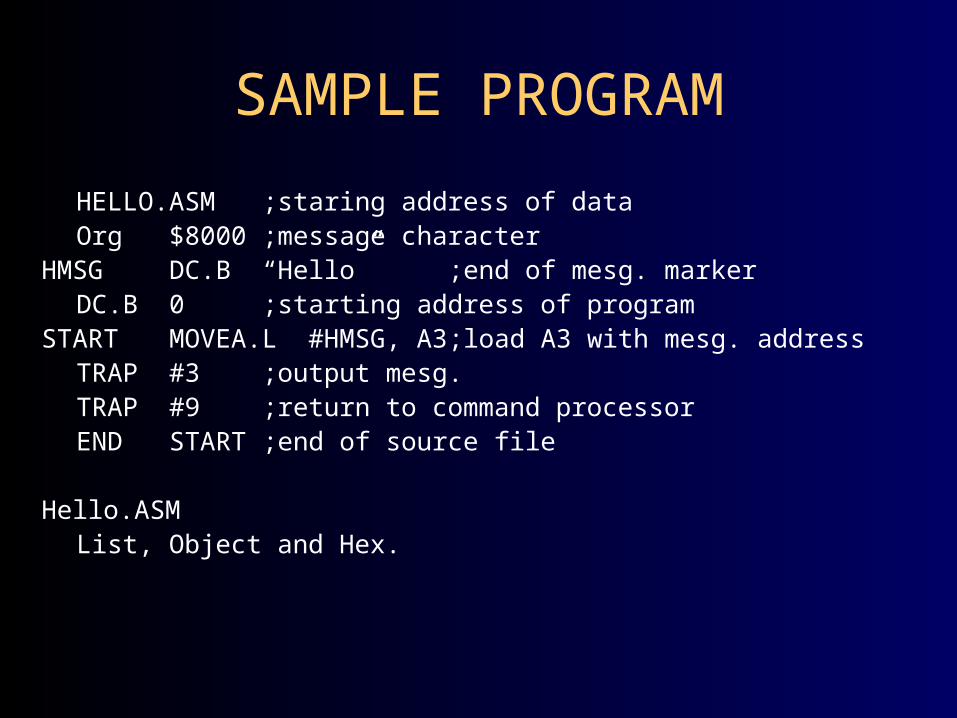
SAMPLE PROGRAM
HELLO.ASM ;staring address of dataOrg $8000 ;message character
HMSG DC.B “Hello” ;end of mesg. markerDC.B 0 ;starting address of program
START MOVEA.L #HMSG, A3 ;load A3 with mesg. addressTRAP #3 ;output mesg.TRAP #9 ;return to command processorEND START ;end of source file
Hello.ASMList, Object and Hex.
THE SOFTWARE MODEL OF THE SOFTWARE MODEL OF 6800068000
• Eight Data Registers D0-D7• Eight Address Registers A0-A7
– Two A7 Registers. • User Stack Pointer USP• Supervisor Stack Pointer SSP
• Program Counter PC• Status Register SR• All the registers except the SR are 32bits in
length.

THE SOFTWARE MODEL OF THE SOFTWARE MODEL OF 6800068000
• This USP and SSP make this processor an ideal for – Multiprogramming– Multiprocessing– Creation of Operating System
• In SSP mode there will be couple of privileged operations– Stop– Reset
• If the user tries to execute these commands then the processor causes an interrupt condition.
• Processor responds to this error condition by entering the supervisor mode and take the appropriate action determined by the software in the routine called the exception handler.
STATUS REGISTERSTATUS REGISTER
• 16 bit SR• Lower 8 bits are for the user• It contains condition code or Flags
– X - Extend– N - Negative– Z - Zero– V - Overflow– C – Carry
STATUS REGISTERSTATUS REGISTER
• The upper 8 bits make up the system byte
• These bits are not available to the programmer unless the processor is in the supervisor mode
• Processing State: S– 0 – User mode– 1 – Supervisor Mode
• T bit is for tracing or debugging the program.
• I0 to I2 are for masking the interrupt

FUNCTIONAL DISCRIPTION FUNCTIONAL DISCRIPTION OF 68000OF 68000
• 8, 16, 32 bit data instructions• LSB and MSB• The upper 8bits will occupy the even memory
location• The lower 8-bits will occupy odd memory location• UDS’ and LDS’ to indicate which portion of the
databus contains the information.• Big Endian Processor
– Stores the MSB in the 1st location.
• Little Endian Processor– Stores the LSB in the 1st location.


















