CHAPTER- 1: INTRODUCTION TO DYNAMICS … from -1 CHAPTER- 1: INTRODUCTION TO DYNAMICS Mechanics as...
92
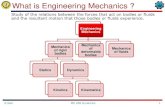
Downloaded from www.jayaram.com.np/ -1 CHAPTER- 1: INTRODUCTION TO DYNAMICS Mechanics as the origin of Dynamics: Mechanics is defined as that science which describe and predicts the conditions of rest or motion of bodies under the action of forces. It is the foundation of most engineering sciences. It can be divided and subdivided as below: (i) Newtonian Mechanics (Engineering Mechancis) (ii) Relativistic Mechanics (It deals with the conditions involving seed of bodies close to the speed of light ) (iii) Quantum Mechanics (It deals with the conditions involving extremely small mass and size ie atomic distance) (a) Mechancis of rigid bodies (b) Mechanics of deformable bodies (c) Mechanics of fluids Statics Dynamics Kinematics Kinetics Mechanics of Compressible fluids Mechanics of Incompressible fluids Dynamics: It is which of Newtonian Mechanics which deals with the forces and their effects, while acting upon the bodies in motion. When we talk about the motion of the planets in our solar system, motion of a space craft, the acceleration of an automobile, the motion of a charged particle in an electric field, swinging of a pendulum, we are talking about Dynamics. Kinematics: It is that branch of Dynamics which deals with the displacement of a particles or rigid body over time with out reference to the forces that cause or change the motion. It is concerned with the position, velocity and acceleration of moving bodies as functions of time. Kinetics: It is that branch of Dynamics which deals with the motion of a particle or rigid body, with the reference to the forces and other factor that cause or influence the motion. For the study of motion Newton’s Second Law is widely used.
-
Upload
phungkhanh -
Category
Documents
-
view
234 -
download
3
Transcript of CHAPTER- 1: INTRODUCTION TO DYNAMICS … from -1 CHAPTER- 1: INTRODUCTION TO DYNAMICS Mechanics as...

Downloaded from www.jayaram.com.np/ -1
CHAPTER- 1: INTRODUCTION TO DYNAMICS
Mechanics as the origin of Dynamics:
Mechanics is defined as that science which describe and predicts the conditions of rest or motion of bodies under the action of forces. It is the foundation of most engineering sciences. It can be divided and subdivided as below:
(i) Newtonian Mechanics(Engineering Mechancis)
(ii) Relativistic Mechanics(It deals with the conditions
involving seed of bodiesclose to the speed of light )
(iii) Quantum Mechanics(It deals with the conditionsinvolving extremely small
mass and size ie atomic distance)
(a) Mechancis of rigid bodies (b) Mechanics of deformable bodies (c) Mechanics of fluids
Statics Dynamics
Kinematics Kinetics
Mechanics of Compressiblefluids
Mechanics ofIncompressible fluids
Dynamics:
It is which of Newtonian Mechanics which deals with the forces and their effects, while acting upon the bodies in motion. When we talk about the motion of the planets in our solar system, motion of a space craft, the acceleration of an automobile, the motion of a charged particle in an electric field, swinging of a pendulum, we are talking about Dynamics. Kinematics:
It is that branch of Dynamics which deals with the displacement of a particles or rigid body over time with out reference to the forces that cause or change the motion. It is concerned with the position, velocity and acceleration of moving bodies as functions of time. Kinetics:
It is that branch of Dynamics which deals with the motion of a particle or rigid body, with the reference to the forces and other factor that cause or influence the motion. For the study of motion Newton’s Second Law is widely used.

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -2
Chapter:- 2
Determination of motion of particles: • In general motion of particles (position, velocity and acceleration ) is expressed in terms of
function as, X = f(x) , [ x = 6t2 +t3 ] * But in practice the relation of motion may be defined by any other equation with function of x, v,& t . a = f(t) a = f(x) a = f(v) etc. so these given relation are integrated to get the general relation of motion x = f(t) . Case-I: When acceleration is given as function of time [i.e a = f(t) ] [ a = 6t2+t3] We know, a = dv/dt → dv = adt or, dv = f(t) dt Now integrating both sides taking limit as time varies from 0 to t and velocity varies form vo to v.
).......()(
)(
)(0
idttfvv
dttfvv
dttfdv
t
oo
t
oo
tv
vo
∫∫
∫∫
+=
=−
=
Again, velocity is given by, V = dx/dt → dx = vdt Again integration both sides of equation similarly form time 0 to t and position xo to x. We get,
∫ ∫=x
x
t
o
vdtdx0
x – xo = ∫ ∫ ⎥⎦⎤
⎢⎣⎡ +
t
o
tdtdttfv
00 )( Putting value of V form equation (i)
∫ ∫ ⎥⎦⎤
⎢⎣⎡ ++=
t t
oo iidtdttfvxx0 0
).........()(
Thus position is obtained from equation of a = f(t) # Find the velocity and position of a particles after its 5 sec from Rest, which moves with equation of a = 6t2-4t. Solution: Given equation a = f(t) → a = 6t2 – 4t xo = 0 , vo = 0 and t = 5. We know,
V0 = ∫ ∫ ∫ ⎥⎦
⎤⎢⎣
⎡−=−==
t
o
t
o
ttdtttdttfdttf 0
55
0
232
24
36)46()()(
[ ] smttv /20022 0523 =−=
Again,

Downloaded from www.jayaram.com.np/ -3
X = xo + dtdttfvt
t
o∫ ∫ ⎥⎦⎤
⎢⎣⎡ +
00
)(
= 0 + [ ] 500
5
0]200[2002000 tdtdt
t==+∫ ∫
= 100 m Therefore, x = 100m and v = 200m/s after 5 second of motion. Case-II When the acceleration is a given function of position [ i.e a = f(x) eg. x2+4x] We know, a = dv/dt = dv/dx . dx/dt = v.dv/dx or, vdv = adx or, vdv = f(x)dx [ ∵ a = f(x)] Now , Integrating both sides of above equation , taking limit as velocity varies from Vo to v as position p varies form xo to x.
i.e ∫∫∫ =⎥⎦
⎤⎢⎣
⎡⇒=
x
xv
vx
x
t
v ooo
dxxfvdxxfvdv )(2
)( 0
2
or, ∫=−x
xdxxf
vv0
)(22
20
2
∵ )1.......()(2 21
20
0 ⎥⎦⎤
⎢⎣⎡ += ∫
x
xdxxfvv
Again We know, V = dx/dt ⇒ dx = vdt. Integrating both sides with limits as time varies from 0 to t and position from xo to x .
i.e )1........(∫∫ =t
o
x
xvdtdx
o
Putting value of v varies from equation (1) we get,
x – xo = ∫ ∫ ⎥⎦⎤
⎢⎣⎡ + dtdxxfv
x
xo
21
20 )(2
∴ ∫ ∫ ⎥⎦⎤
⎢⎣⎡ ++=
t x
xo dtdxxfvxx0
21
20
0
)(2
Case III : When acceleration is a given function of velocity (i.e a =f(v) eg. a = v2+v) We know, a = v dv/dx ⇒ f(v) = v dv/dx Or , dx = v dv/f(v) Integrating both sides taking limit as velocity varies form vo to v and position varies from xo to x
∫∫∫ =−⇒=v
v
v
v
x
x vfdvvxx
vfdvvdx
000 )()( 0
∴ ∫+=v
v vfdvvxx
0 )(0
e.g The acceleration of a particle is defined as a = -0.0125v2, the particle is given as initial velocity v0, find the distance traveled before its velocity drops to half. Solution: Given, a = -0.0125v2 i.e a = f(v) , Initial velocity vo, final velocity vo/2 For motion a = f(v) xo = 0, x = ?

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -4
x = xo + ∫v
v vfdvv
0 )(
=x ∫ ∫−
=−
2 22
0
0
0
0
10125.0
10125.0
v
v
v
vdv
vdv
vv
[ ] ⎥⎦
⎤⎢⎣
⎡−=−=
0
02
2ln
0125.01ln
0125.01 0
0 vv
vv
v
Or, x = 24.08 m ans. 2.2 Uniform Rectilinear motion: * Uniform motion means covering equal distance over equal intervals of time. ie velocity = constant. We have, V = dx/dt = v [ v = constant velocity of body]
∴ dx = udt ⇒ ∫∫ =tx
xvdtdx
00
[ Integrating both sides under limits as position varies from xo to x and
time 0 to t] ∴ x – xo = vt x = xo +vt
∴ Change in position (or displacement) is equal to uniform velocity x change in time [ i.e s = vt] 2.3 Uniform Accelerated Rectilinear motion: If constant acceleration be ‘a’ then, dv/dt = a = constant ⇒ dv = adt Integrating both sides with limit v0 to v and 0 to t . We get,
atvvdtadvtv
v=−⇒= ∫∫ 000
)1........(0 atvv += Again for position , we have v = dx/dt …..(2) from 1 and 2. dx = (vo +at) dt , Integrating both sides over the limits
( ) 2000 0 2
10
attvxxatdtvdxtx
x+=−⇒+= ∫∫
200 2
1 attvxx ++=
Also, a = dxdvv
Or, vdv = adx Integrating both sides under limits
∫∫ =x
x
v
vdxavdv
00
( ) ( )020
2
21 xxavv −=−
( )020
2 2 xxavv −+= 2.4 Motion of several particles: Two or more particles moving in straight line. Equations of motion may be written for each particles as:
xo = Initial position x = Final position v0 = Initial velocity. v = Final velocity 0 = Initial time t = Final time

Downloaded from www.jayaram.com.np/ -5
(a) Relative motion of two particles (b) Dependent motion.
(a) Relative motion of two particles:
Consider two particles A and B moving along the same straight line as follows: A
xA xB/A
xB
B
[ xB/A =xB - xA]
Position co-ordinates of A = xA Position co-ordinates of B = xB Relative position co-ordinate of B w.r.t A = xB-xA = xB/A
∴ xB = xA+xA/B ………(1) [ + xB/A → B is right to A in position ] [ -xB/A → B is left to B in position ] Differentiating equation (1) w.r.t time we get, VB = VA+VB/A ------(2) [ VA , VB → absolute velocity of pt. A and B] [VB/A → velocity of B observed from pt. A] Differentiating equation (2) w.r.t time we get, aB = aA +aB/A ………… (3) [ aB , aA → absolute velocity of pt A and B and aB/A acceleration of pt B w.r.t pt A. ] (b) Dependent Motion:
When the position of a particles will dependent upon the position of another or several other particles, the motions are said to be dependent. eg :- pulley systems, Gear system etc. Pulley system as Dependent motion: Consider the pulleys system in which the position of Block ‘B’ depends upon the position of Block A as follows: From Figure: IH = Constant JB = Constant Arc CD = Constant Arc EF = Constant AC+DE+FG = Constant Now, XA = AC +IH = AC + Constant ………. (i) XB = FG +JB = FG + Constant ………….(ii) Multiplying equation (ii) by 2 and Adding to (ii) we get, XA +2xB = AC+2FG+ Constant = AC + FG+FG +Constant = AC +FG+DE+D’G+ constant [ Since FG = DE+D’G] =AC+FG+DE+ Constant [ Since D’G = Constant ]
A
B
D’DC
H G
FE J
xA
xB

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -6
∴ xA+2xB = Constant ……..(iv) [ AC+DE+FG = Constant ] If A block ‘A’ is given ∆xA motion it will produce xB = (-∆xA/2) as the motion of Block B.
Differentiating equation (iv) w.r.t time , we get, VA+2VB = 0 , ………(v) Or, VB = -(VA/2) Similarly differentiating equation (v) w.r.t time we get, AA +2aB = 0 ………(vi) Or, aB = - (aA/2) [ Negative sign denotes opposite in direction ] * In this case displacement, velocity and acceleration of one body gives the displacement, velocity and acceleration of other body. This arrangement is called 1-degree freedom . # Derive the equation of motion of the given pulley system. Solution: 2xA +2xB +xc = Constant ……….(1) 2vA +2vB +vc = 0 …………..(2) 2aA +2aB +ac = 0 ………….(3)
A
xA
B
C
G
xB
xCI M N o
J LK
D E F
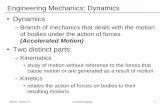
2.6 Graphical solution of Rectilinear motion problems: * Graphical solution are very helpful to simply and solve the problems of Dynamics. * Using the motion graphs (i.e x –t , v-t and a-t ) the missing value at any point can be obtained . * If any on equation of motion is known all the three graphs can be obtained as follows. If equation of displacement x = f(t) ……..(i) is known, Then , V = dx/dt …….(ii) a = dv/dt …….(ii) i.e velocity is slope of x-t curve and acceleration is slope of v-t curve.
x1
t1
x
t
x= f(t)
Sloe= dx/dt = v1
V1
t1t
V
Sloe= dx/dt = a1
V= f(t) a1
t1t
a
a= f(t)

Downloaded from www.jayaram.com.np/ -7
If x-t curve is given, then computing slope at each point of x-t curve corresponding v-t curve can be generated and computing slope at each point of v-t curve a-t curve can be generated. Again, From equation (ii) vdtdx =
∫ ∫∫ =−⇒=2
1
2
1
2
1
).(..........12
x
x
t
t
t
tivvdtxxvdtdx
And from equation (iii) , dv = adt
).(..........22
1
2
1 112 vadtvvadtdvt
t
t
t
v
v ∫∫∫ =−⇒=
• This means change in position in given by the area under curve v-t and change in velocity is given by
area under the curve a-dt.
a1
t
a
t1 t2
V2
t1t
V
V1vdt = x2 - x1
t2
t1
t2
x
tt1
x1
x2
Tutorial Examples:
1) The motion of a particles is defined by the position vector ktjtitr ˆ4
ˆ463
2 ++=)r
where r in meter and t in
second. At the instant when t = 3 sec, find the unit position vector, velocity and acceleration. Solution:
We have , ktjtitr ˆ4
ˆ463
2 ++=)r
At time t = 3 sec. kjir ˆ4
27ˆ36ˆ18 ++=r
( ) ( ) mrr 81.404
2736182
22 =⎟⎠⎞
⎜⎝⎛++==
r
Now unit position vector at t = 3 sec.
81.40
ˆ4
27ˆ36ˆ18ˆ
kji
rrr
++== r
r
( ) Anskjir ˆ165.0ˆ88.0ˆ44.0ˆ ++=∴ Again,

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -8
⎟⎟⎠
⎞⎜⎜⎝
⎛++== ktjtit
dtd
dtrdv ˆ
4ˆ4ˆ6
32
rr
ktjtiv ˆ43ˆ8ˆ6 2++=
r
At time t = 3 sec.
⎟⎠⎞
⎜⎝⎛ ++= kjiv ˆ
424ˆ24ˆ6r
Velocity (v) = smv /64.25724246
21
222 =
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎠⎞
⎜⎝⎛++=
r
V = 25.64 m/s
Again, acceleration ( ) ⎟⎠⎞
⎜⎝⎛ ++== ktjti
dtd
dtvda 2
43ˆ8ˆ6
rr
ktja ˆ23ˆ8 +=
r
At t = 3 sec , kja ˆ5.4ˆ8 +=r
Acceleration, (a) = ( )[ ] Anssma 221
22 /18.95.48 =+=r
2) A ball is thrown vertically upward with a velocity of 9.15m/s. After 1s another ball is thrown with the
same velocity. Find the height at which the two ball pass each other? Solution: Let the initial velocity of both balls V01 = v02 = vo = 9.15 m/s h be the height at which two balls pass each other t1 be the time elapsed by the first ball before passing second and t2 be the time elapsed by second. From the given condition: t1 – t2 = 1 ……..(i) for 1st ball , n = v0t1 – ½ 9t1
2 ……..(ii) For 2nd ball n = v0t2 – ½ 9t2
2 ………(iii) Substituting equation (iii) form equation (ii) , we get,
( ) ( )21022
219
21 ttvtt −=−
( )( ) ( )2101221921 ttvtttt −=−+
( )
( ) ).(..........865.1
865.181.9
15.929
2
21
021
ivtt
vtt
=+
=×
==+∴
Adding equation (i) and (ii) , we get t1 = 1.43 sec and t2 = 0.43 sec
mttvh 05.3921 2
110 =−=∴
h = 3.05 m Hence , two balls pass each other at 3.05m above the ground. 3) In the following pulley system, Block 2 has velocity 2m/s upward and its acceleration is 3m/s2 downward
while block 3 has velocity and acceleration 2m/s up ward and 4m/s2 downward respectively. Find the velocity and acceleration of block 1.

Downloaded from www.jayaram.com.np/ -9
Solution: Given, V2 = 2m/s (↑) a2 = 3m/s2 (↓) v3 = 2m/s (↑) a3 = 4m/s2 (↓) Here , AB +CF = constant GI +HJ = Constant DE = Constant Portion of rope around the pulley is also constant. Now, X1 = AB + constant ……..(i) X2 = GI +CF+ constant …….(ii) X3 = HJ+CF+ Constant ……(iii) Multiplying equation (i) by (2) and adding (i), (ii) and (iii) , we get 2x1 +x2+x3 = 2AB+CF+CF+GI+HJ+Const. 2x1+x2+x3 = const. ………..(iv) Differentiating equation (iv) w.r.t time. 2v1+v2+v3 = 0 ………(v) 2a1+a2+a3 = 0 ……..(vi) From equation ‘v’
smvv
v /22
222
321 −=
−−=
−−=
Therefore, velocity of block 1 (v1) = 2 m/s (↓) From equation (vi)
2321 /5.3
243
2sm
aaa =
++=
−−=
Therefore, acceleration of block 1 (a1) = 3.5 m/s2 (↑)
1
3
B
H
x1
2
x2
C
G
x3
I
J
A
F
E

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -10
Chapter – 3 Curvilinear Motion of Particles
3.1 Position vector, Velocity and Acceleration: When a particle moves along a curve path other than a straight line, it is said to be in curvilinear motion. Vector analysis is used to analyze the change in position and direction of motion of particles.
Let, at time ‘t’ the position vector of particle be r and at another time )( tt ∆+ the particle takes a new
position p' and its position be r !. Then r∆ represents the change in directoin as well as magnitude
of the position vector r . (fig. a) The average velocity of the particles at time interval
trt
∆∆
=∆ ( in magnitude and direction of r∆ )
∴Instantaneous Velocity, dt
rdtrv
t=
∆∆
=→∆ 0
lim
As r∆ and t∆ becomes shorter, PP ′& gets closer and v is tangent to the path of the particle. (fig c)
And, As t∆ decreases, length of PP ′ ( r∆ ) equals to length of arc s∆ (fig b)
dtds
ts
tPP
tt=
∆∆
=∆
′=∴
→∆→∆ 00limlimν
Change in position ( r∆ ) can be resolved into two components, i One parallel to x-axis and ( PP ′′ ) ii Other parallel to y-axis ( PP ′′′ )
PPPPr ′′′+′′=∆∴
tPP
tPP
tror
ttt ∆′′′
+∆
′′=
∆∆
→∆→∆→∆ 000limlimlim,
O X
Y
r
r
∆r
p
p
(b)
∆r≈∆ s
∆r∆t
O X
Y
r
r
∆r
p
p∆s
(a) o X
Y
r
p
(c)
s
∆Y
yP p
p
∆r
V
α
X
Y
Ox ∆x
Y
XO
Pv
vy
vx
vα

Downloaded from www.jayaram.com.np/ -11
jtyi
txor
ttˆlimˆlim,
00 ∆∆
+∆∆
=→∆→∆
ν
jdtdyi
dtdxor ˆˆ, +=ν
jvivor yxˆˆ, +=ν
jyixor ˆˆ, +=ν Then, 22
yx vvV += [Magnitude of Velocity]
x
yv
v=αtan
x
y
vv1tan −=∴α [Direction of Velocity]
Similarly, acceleration by curvilinear motion can be computed as: If v and v′ be the velocities at time ‘t’ 4 )( tt ∆+ i.e. tangents at P and P′ , then the average acceleration of the particle over the timer interval is given by
tvat
∆∆
=∆ )(
dtvd
tvaor
t=
∆∆
=→∆ 0
lim,
Again, v∆ can be resolved into QQQQ ′′′′′ & parallel to x & y-axes respectively. Then,
QQQQv ′′′+′′=
tQQ
tQQ
tvor
ttt ∆′′′
+∆
′′=
∆∆
→∆→∆→∆ 000limlimlim,
jt
vi
tv
aor y
t
x
tˆlimˆlim,
00 ∆
∆+
∆∆
=→∆→∆
jdt
dvi
dtdv
or yx ˆˆ +
jaiaor yxˆˆ, +
jyixaor ˆˆ, +=
magnitudeinonacceleratiaaaor yx ⇒+= 22 )()(,
Positive Value of →xv Right Direction Positive Value of →yv Upward Direction
ydtdyvx
dtdxv yx ==== ;
O X
Y
r
r
∆r
v
v
∆s
(a)O X
Y
v
v
(b)
Q
Q
∆vvy
vx
Q
X(c)
q
q
Y
O
ay
axqβ
dtdv
a
dtdva
yy
xx
=
=

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -12
duQd
duPdQP
dud
+=+∴ )(
duPdfP
dudf
duPdf
+=∴
directioninaaaa
xyx
y ⇒=⇒= − )(tantan 1ββ
3.2 Derivatives of a vector function:
O X
Y
(a)
Ζ
∆p
O X
Y
(b)
Ζ
dpdu
p=f(u)=2u2+4u+3
Let, )(uP be a vector function of scalar variable u. If value of ‘u’ is varied, ‘ P ’ will trace a
curve in space. Considering change of vector P corresponding to the values u 4 ( )uu ∆+ as shown in figure(a). Then )()( upuupp −∆+=∆
- (1)
As ,0→∆u p∆ becomes tangent to the curve. Thus du
pd is tangent to the curve as shown in
figure(b). Again, Considering the sum of two vector functions )(&)( uQup of the same scalar variable u. Then
the derivative of the vector )( QP + is given by:
uQ
uP
uQ
uP
uQPQP
dud
uuuu ∆∆
+∆∆
=⎥⎥⎦
⎤
⎢⎢⎣
⎡
∆∆
+∆
∆=
∆+∆
=+→∆→∆→∆→∆ 0000
limlim){){lim)(lim)(
- (2) Again, product of scalar function f(u) and pf a vector function )(uP of the same scalar variable u.
Then, derivative of f P is given by:
( )( )u
PfPPffdu
pdfu ∆
−∆+∆+=
→∆ 0lim.
⎥⎥⎦
⎤
⎢⎢⎣
⎡
∆∆
+∆∆
=→∆ u
PfPuf
u 0lim
- (3)
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
∆−∆+
=∆∆
=→∆→∆ u
upuupup
dupdei
uu
)()(limlim..00

Downloaded from www.jayaram.com.np/ -13
duQdPQ
duPdQP
dud ..).( +=
duQdPQ
duPdQP
dud
×+×=× )(
kPjPiPP zyxˆˆˆ ++=
kdudP
jdudP
idudP
duPd yyx ˆˆˆ ×+×+×=∴
kdt
dPj
dtdP
idt
dPdtPd yyx ˆˆˆ ×+×+×=∴
kzjyixr ˆˆˆ &&& ++=
kvjvivV zyxˆˆˆ ++= )( 222
zyx vvvV ++=∴
zyx
zyx
azayax
vzvyvx
===
===
&&&&&&
&&&
&,
&,
kajaiaa zyxˆˆˆ ++=
)( 222zyx aaaa ++=∴
o X
Y
Z
vz
vx
vy
v
Similarly, scalar product and vector product of two vector functions )()( uQanduP may be obtained as: - (4) [Scalar Product] - (5) [Vector Product] Again, - (6) where, zyx PPP &, are the rectangular scalar components of vector P & kji ˆ,ˆ,ˆ are the unit vector. - (7) [where, )](ufP = And,
- (8) [where, )](tfP = 3.3 Rectangular Components of Velocity and Acceleration: When, the position of a particle is defined by at any instant by its rectangular co-ordinates x, y, z as: - (i) Then, differentiating both sides w.r.t. time, we get,
kzjyix &&&&&& ++==dt
rdν
where, So,

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -14
ax
ay
Vo= 100m/s
nmax
80mHill
P
A
B
When the motion in each axis can be represented independent with each other then the use of rectangular components to describe the position, velocity and acceleration of a particle is effective i.e. motion in each axis can be considered separately. For e.g. for projectile motion, neglecting air resistance, the components of acceleration are: gaanda yx −== 0 gvandvor yx −== 0, gdtdyanddvor x −== 0, On Integrating both sides under the limits, ∫∫ ∫ −==
tv
v
v
vx dtgdyanddvx
x
y
y 00
o o
gtvvandvv yyxx −=−=−oo
0 )(vgtvvandvv yyxx −−===
oo
gtvyandvxor yx −==oo
&&,
gtvdtdyandv
dtdxor yx −==
oo,
gtdtdtvdyanddtvdxor yx −==oo
, Integrating both sides under limits considering motion starts from origin by co-ordinates i.e. x at t=0 ; x=0 ; y=0 and at t=t0, x=x0 and y=y0
∫∫ ∫∫∫ −==ty t
y
tx
x tdtgdtvdyanddtvdx o
00 000 0
0
0
)(21 2
00 00vigttvyandtvx yx −−==
Thus motion under projectile can be represented by 2-independent rectilinear motion.
Y
XO
Vx
XoVxo
youy
uyo
Vxo
V
Problems: 1. A bullet is fired upward at an angle of 30° to the horizontal from point P on a hill and it strkies a target which is 80m lower than the level of projection as shown in figure. The initial velocity of the bullet is 100m/s. Calculate: a. The maximum height to which the bullet will rise above the horizontal. b. The actual velocity with which it will strike the target c. The total time required for the flight of the bullet. Solution:
smVV
smVVsmV
y
x
/5030sin
/60.8630cos/100
0
0
0
0
0
==
===

Downloaded from www.jayaram.com.np/ -15
nmax
80mB
AVo= A
P
a) ( )Ansmh
gV
h
42.127
42.1272
30sin
max
220
max
=∴
==
b) Let, =yV1 vertical component of velocity at highest point A = 0
=yV2 vertical component of velocity striking target
H = vertical distance between point A and target = 127.42+80 = 207.42m Then, ]0[2 1
21
22 ==− yyy VgHVV
smVor y /79.63, 2 =⇒ ]tan[/60.86
0012 tconsVsmVVV xxxx ====
smVVV yx /55.10722
222 =+=∴ (Ans)
& °== − 37.36tan 1
xy
zy
VV
θ
c) 2220 2
1)( gttVh y −=
)(sec60.11,
08050905.4,
8.9215080,
2
222
222
AnstxvSolving
ttor
ttor
==
=−−
××−×=−
2) The motion of a vibrating particle is defined by the equation x=100sin tπ and y=25cos2 tπ , where x & y are expanded in mm & t in sec. a) Determine the velocity and acceleration when t=15 b) Show that the path of the particle is parabolic. Solution: a) We have, x=100sin txVt x πππ cos100==⇒ & txax ππ sin100 2−== && Again, y=25cos2 tπ tyVy ππ 2sin50−==⇒ &
tyay ππ 2cos100 2−== && Then, for t=2sec, ]1sin50[:]1cos100[ 2 ×−=×= ππππ yx VV
22
yx VVVV +==
22 )2sin50()cos100( πππ −+= t
0)(tan/100 1 === −
x
y
VV
smmV απ
Total time of flight is the sum of time to reach B from A & to C from B T=t1+t2
t1= gV αsin2 0 & PB=Range=
gV αsin2
0

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -16
And, For t=1sec
°==
=+==
×−=−=
− 270)(tan
/100
12cos100:]sin100[(
1
2222
22
x
y
yx
yx
aa
smmaaaa
aa
β
π
ππππ
b) Since, x=100sin tπ
tx πsin100
=∴
)(sin)100
( 22 itx−=∴ π
Again, ty π2cos25=
)(cos50
25
cos2125
,
1cos225
,
2
2
2
iity
tyor
tyor
−=+
∴
=⎟⎠⎞
⎜⎝⎛ +
−=
π
π
π
Adding equations (i) and (ii), we get ;
][ parabola ofequation theiswhich ,5000200,
100005000200,
1cossin50
2510000
22
2
222
cbyaxyxoryxor
ttyx
=+=++
=++
=+=+
+ ππ
3) The motion of a particle is given by the relation Vx=2cost & Vy=sint. It is known that initially both x & y co-ordinates are zero. Determine a) Total acceleration at the instant of 25 b) Equation of the parabola a) Here, Vx=2 cost & Vy =sint
Then, ax= tdt
dvx sin2−=
and, tdt
dva y
y cos==
jtita
jaiaa yx
ˆcosˆsin2
ˆˆ
+−=
+=∴
For t = 2 sec
At t=2sec ax=-2sinz=-1.82 ay=cos2=-0.42
222 /865.1 smaa yx =+=α
°== − 193tan 1
x
y
aa
β
( )( )
parabola ofequation required theiswhich ,084,1)1(4,)(
)(cos11cos,
22
22
22
=−+
=−+
−=−⇒+−=
yyxoryxiiandiAdding
iitytyor

Downloaded from www.jayaram.com.np/ -17
[ ]
)(19382.142.0tantan
/865.1)42.0()82.1(
on accelerati Total
ˆ42.0ˆ82.1
radianin is2,ˆ2cosˆ2sin2
11
222
Ansaa
sm
jia
whereiia
x
y °=⎟⎠⎞
⎜⎝⎛
−−
==
=−+−==
=∴−−=
+−=
−−β
αα
αQ
b) ∫ ∫=⇒=⇒=x t
x dtdxtdtdxtV
0 0cos2cos2cos2
)(sin4
,
sin2,
22
itxor
txor
−=
=
Again, ∫∫ =⇒==ty
y tdtdytdxdyV
00sinsin
3.4 Motion Relative to a Frame in Translation: Let A and B be the particles moving is a same plane with BA rr & be their position with respect to XY axis. Considering New axes (X'-Y') centered at ‘A’ and parallel to original axes X-Y, the motion of particle ‘B’ can be defined with respect to motion of particle ‘A’ such that: From vector triangle OAB
)(/ irrr ABAB −+= ,similarlyand
ABAB
ABAB
YYY
XXX
/
/
+=
+=
Differentiating equ(i) w.r.t. time, we get: )(iiiVVV BAB −+=
In scalar form:
ABBB
ABAB
YYY
XXX
/
/
&&&
&&&
+=
+=
OR
( )
( ) yyy
xxx
ABAB
ABAB
VVV
VVV
)/()(
)/()(
+=
+=
Again, differentiating (iii) with respect to time, we get:
)(/ vaaa ABAB −+= In scalar,
- (ii)
where, • XA,YA & XB & YB are co-ordinates of A & B
w.r.t. XY axes • XB/A, YB/A are co-ordinates of ‘B’ .r.t. X'-Y' axis
- (iv) axis-yin motion ofEquation Y
axis-in xmotion ofEquation
axesy andboth x in motion ofEquation
→
→
→
X
r
where,
ABABAB
BB
AA
YX
YX
YX
///
B
A
V of components Y & X are
V of componens Y & X are ,
V of components Y & X are ,
&&
&&
&&
( ) ( )
Bx
By
ByBxB
aa
aaa
1
22
tan−=
+=
β

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -18
ABAB
ABAB
YYY
XXX
/
/
&&&&&&
&&&&&&
+=
+= OR
yAByAyB
xABxAxB
aaa
aaa
)/()()(
)/()()(
+=
+= - (vi)
3.4 Tangential and Normal Components:
The velocity of particle is vector tangent to the path of particle. But acceleration may not be tangent in curvilinear motion.
The acceleration vector may be resolved into two components perpendicular with each other in directions
i First component along the tangent of path of particle (at) ii Second component along the normal of path of particle (an)
Let nt ee ˆ and ˆ be the unit vectors directed along the tangent and normal of the path
respectively. Then, in curvilinear motion, nt ee ˆ and ˆ would change the direction as particle
moves from one point to another.
x
yy
pp’
xoo
p
(a) (b)
rr r
et=dr dsr/ s
From fig (a) [ ] lim& '
0ssrrrr ∆=∆−=∆
→∆
Then, dsdr
sre
st =∆∆
=→∆ 0
limˆ
)(ˆ idsdret −=∴
Again, [ ]srss
s
rte
ss∆=∆=
∆∆
=∆
∆=
→∆→∆ 00lim1limˆ
Therefore, path. o tangetn t thealongr unit vecto theis ˆds
rdte =
Let, ρ be the radius of curvature of the path at the point P and 'ˆ&ˆ tt ee be the tangent unit vectors at
P and P'. te∆ be the change in unit vector while the particle moves from P to P'.

Downloaded from www.jayaram.com.np/ -19
x
y
o
(a)
en p
p’e’r
ex
o (b)
et
exe’x
y
xo (c)
p
at =dVet dt
a =at et + an en
Now, from fig,
θρ∆==∆ 'PPs [ ]magnitudeineeeeee nntttt 1ˆe 0s Asˆˆˆˆˆ t' →=→∆∆=∆≡−=∆ θθ
)(ˆ
ˆˆ
limˆ0
iided
ee
e tn
t
sn −⎥⎦⎤
⎢⎣⎡ =⇒
∆∆
=∴→∆ θθ
Similarly,
(iii) ˆˆ
and 1−⎥
⎦
⎤⎢⎣
⎡== n
t eded
dsd
θρθ
Also,
dtd
tts
dtdsV
tt
θρθρ=
∆∆
=∆∆
==→∆→∆ 00
limlim
)(ivdtdV −⎥⎦
⎤⎢⎣⎡ ==∴ ρθθρ
tt evvedtds
dsrd
dtrdV ˆˆ. ====
[ ] )(ˆ veVV t −=∴ And,
dtds
dsd
ded
vedtdv
dted
vedtdveV
dtd
dtvda t
tt
tt ..ˆ
ˆˆ
ˆ)ˆ( θθ
+=+===
)(ˆˆ,
)1)(ˆ(ˆ,
2
vieVeVaor
eVeVaor
nt
nt
−⎥⎦
⎤⎢⎣
⎡+=
+=
ρ
ρ
&
&
which can be represented as in fig(c). where,ˆˆ nntt eaeaa +=
=ta Tangential component of acceleration = vdtdv
&=
=na Normal component of acceleration = 22
θρρ
&=V
Notes: For increasing velocity at will be in the direction of velocity and fx decreasing velocity at will
be in opposite to the direction of velocity. If the speed is constant at=0 but an≠0. [an=0 fx Recti αρ = ] an is always directed towards the centre of curvature For higher velocity and smaller radius higher is an.
3.6 Radial and Transverse Components:

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -20
For the motion described by polar co-ordinates. Position of particles P is defined by the co-ordinates r & θ , where r is the length and θ is the
angle in radians. The unit vectors in radial and transverse direction are denoted by θeer ˆ and ˆ respectively along
radius and 90° clockwise to the radius in direction. fig (a)
x
y
(a)
e
x
y
(b)
e
P(r, )r = rer er
er
eo
r
r’ eo
As the particle moves from '.PtoP The unit vectors θeer &, change to θ'ˆ&'ˆ ee r by
θeer ∆∆ and respectively.
Here,
⎥⎦⎤
⎢⎣⎡=== θθ θ
θθθ
e ofdirection in is ded ofdirection (i) - - - - - ˆ.
ˆˆˆ r&& edtd
ded
dtede rr
r
⎥⎦
⎤⎢⎣
⎡−=== re- ofdirection in is ded
ofdirection (ii) -----ˆ.ˆˆ
ˆθ
θθθθ
θθθθ
&&re
dtd
ded
ded
e
Now,
rerr ˆ=
Then, rrr
rr ererdtedre
dtdrer
dtd
dtrdV && ˆˆˆˆ)ˆ( +=+===
[ ] [ ]θθ θθ&&&& eererV r ˆe (iii) - ˆˆ r =+=∴
which can expressed as θθ eVeVV rr ˆˆ += , where Vr = Radial component of velocity = r& And, θV = Transverse component of velocity = rθ& Similarly,
( )θθ ererdtd
dtvda r
&& +== ˆ
θθθ θθθ ererererer rr&&&&&&&&&& ˆˆˆˆˆ ++++=
[ ]θθθθϑθ θθθθθ&&&&&&&&&&&&& rrrr eeeeererererer ˆˆ&ˆˆˆˆˆˆ 2 −==∴−+++=
( ) ( )[ ] )(ˆ2ˆ2 verrerra r −++−=∴ θθθθ &&&&&&& which can be represented as, θθ eaeaa rr ˆˆ += where, =ra Radial component of acceleration = ( )2θ&&& rr − and, =θa Transverse component of acceleration = ( )θθ &&&& rr 2+

Downloaded from www.jayaram.com.np/ -21
In case of a particle moving along a circular path with its centre at the origin O, we have r=constant or, 0&0 == rr &&& Then, )(ˆ vierv −= θθ&
)(ˆˆ2 viierera r −+−= θθθ &&& Problems:
1) The motion of a particle is defined by the position vector, ,ˆ5ˆ4ˆ3 432 ktjtitr ++= where r is in m and t is in sec. At instant when t=4 sec, find the normal and tangential component of acceleration and the radius of curvature. Solution, we have
ktjtidtvda
ktjtitdt
rdV
ktjtitr
ˆ60ˆ24ˆ6&
ˆ20ˆ12ˆ6
ˆ5ˆ4ˆ3
2
32
432
++==
++==∴
++=
Again,
( ) )(40014436 21
642 itttVV −++==
( ) ( )[ ] )(602436 21
222 iittaa −++==
Now, At t = 4sec V=1294.54m/s [putting t=4 in equ-(i)] a=964.81m/s2 [putting t=4 in equ-(ii)] Again, Tangential component of acceleration,
( )
( )( )53
21
642
21
642
24005767240014436
1.21
40014436
tttttt
tttdtd
dtdvat
++×++
=
++==
At time t=4 sec, at=963.56m/s2 (Ans) Now,
( ) ( )
)(/1.49
56.96381.9642
2222
Anssma
aaa
n
tn
=∴
−=−=
Again,
( ) )(03.341311.4954.1294 22
AnsmaV
n
===ρ
2. A car is traveling on a curved section of the road of radius 915m at the speed of 50km/hr. Brakes are suddenly applied causing the car to slow down to the 32 km/hr after 6 sec. Calculate the acceleration of the car immediately after the brake have been applied.

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -22
Solution: Given,
m/sec 8.88km/hr32V
m/sec 13.8850km/hrV915mρ
1
0
====
=
At the instant when the brake is applied,
( )
tn
ttnn
t
n
eea
eaeaa
smtVV
a
smVa
ˆ833.0ˆ210.0
ˆˆ
/833.0
/210.0915
88.13
201
222
−=
+=
−=∆−
=
===ρ
( ) ( )
)(2.1483.021.0tantan
)(/856.083.021.0
11
222
Ansaa
Anssmaa
t
n °=⎟⎠⎞
⎜⎝⎛−==
=−+==
−−β
3. The plane curvilinear motion of the particle is defined in polar co-ordinates by r=t3/4+3t and θ =0.5t2 where r is in m,θ is in radian and t is in second. At the instant when t=4 sec, determine the magnitude of velocity, acceleration and radius of curvature of the path. Solution: We have,
2/334
334
23
trtrttr =⇒+=⇒+= &&&
Again, 15.0 2 =⇒=⇒= θθθ &&& tt Now, we have
)(ˆ34
ˆ34
3ˆˆ32
ietttetererv rr −⎟⎟⎠
⎞⎜⎜⎝
⎛++⎟⎟
⎠
⎞⎜⎜⎝
⎛+=+= θθθ&&
Again, at t = 4 sec
( ) ( ) )(/13311215
ˆ112ˆ15222 Anssmvv
eev r
=+==∴
+= θ
Again,
( )
θ
θθθθ
ettttetttt
errerra
r
r
ˆ34
32134
ˆ342
3
ˆ)2(ˆ23
23
2
⎭⎬⎫
⎩⎨⎧
⎟⎟⎠
⎞⎜⎜⎝
⎛++×⎟⎟
⎠
⎞⎜⎜⎝
⎛++
⎭⎬⎫
⎩⎨⎧
⎟⎟⎠
⎞⎜⎜⎝
⎛+−=
++−= &&&&&&&
At t = 4 sec,
( ) ( ) ( )Anssmaa
erea
2/12.46621
21482442
ˆ148ˆ442
=⎥⎦⎤
⎢⎣⎡ +−==
+−= θ
Again, from equ(i) [for ρ ]

Downloaded from www.jayaram.com.np/ -23
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛++×
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛+++
×=
⎥⎥⎦
⎤
⎢⎢⎣
⎡+++==
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛++⎟
⎟
⎠
⎞
⎜⎜
⎝
⎛+==
ttt
ttt
a
tttdtd
dtdv
ta
tttvv
274
3338
53
21
92
22716
43316
6
121
21
92
22716
43316
6
21
223
4
423
4
23
Q
Q
At t = 4 sec,
( )[ ] ( ) ( )[ ]2
1222
122
2
005.1612.466
/055.16
−=−=
=
tn
t
aaa
sma
Q
( ) mav
sma
n
n
41.2784.465
113
/84.46522
2
===∴
=∴
ρ
Hence, Radius of curvature = 27.41m (Ans)

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -24
Chapter – 4 KINETICS OF PARTICLES NEWTONS SECOND LAW
4.1 Newton’s Second Law of Motion:
Newton has given his understanding of motion of particles and their causes and effects in 3 laws.
The first and third law of motion deals with the bodies at rest or moving with uniform velocity i.e. without any acceleration.
For the bodies under the motion with acceleration the analysis of motion and forces producing it is done by the application of Newton’s Second Law.
Statement of Newton’s 2nd Law: “If the resultant force acting on a particle is not zero, the particle will have an acceleration proportional to the magnitude of the resultant and in the direction of this resultant force.
a1
F1
a2
F2
a2
F2
321 F ,F ,F If , etc be the resultant forces of different magnitude and direction acting on the particle.
Each time the particle moves in the direction of the force acting on it and if 321 ,, aaa , etc be the
magnitude of the accelerations produced by the resultant forces. Then,
(m) particle of massconstant..........FFF
........F,F,F
3
3
2
2
1
1
332211
=====
∝∝∝
aaa
etcaaa
So, when a particle of mass ‘m’ is acted upon by a force ,n acceleatio and F a they must satisfy the relation,
same] are & F ofdirection where[)(amF ai−=
i.e. ( )kajaiakji zyxˆˆˆmˆFˆFˆF zyx ++=++
which is Newton’s Second Law. When a particle is subjected simultaneously to several forces equation(i) is modified as:
( ) ( )∑∑ ++=++= kajaiamkjieia zyxˆˆˆˆFˆFˆF..mF zyx
where, ∑F = sum of resultant of all forces acting.
∑ ∑∑ zyx aaa ,,,F,F,F zyx are x, y and z component of the forces and acceleration acting on
the particle respectively. Notes:
(i) When the resultant force is zero, the acceleration of the particle is zero.
(ii) When V0=0 and 0F =∑ , Then particle would remain at rest.

Downloaded from www.jayaram.com.np/ -25
(iii)When V0=V and 0F =∑ , Then particle would move with constant velocity, V along the
straight line. (iv) All the above cases defines the first law, hence the Newton’s 1st Law of Motion is a particular
case of Newton’s 2nd Law of Motion. 4.2 Linear Momentum and Rate of Change [Impulse Momentum Theorem}:
From Newton’s 2nd Law, amF =
or, dtvdmF =
( )ivmF −=∴ )(dtd
Multiplying both sides by dt and integrating under the limits, we get:
)(1221
2
1
2
1iivmvmIvdmFdt
v
v
t
t−−=⇒= −∫∫
The term ∫2
1
t
tdtF is called the impulse ( I ) of the force during time interval (t2-t1) whereas vm is
the linear momentum vector of the particle. So, equation (ii) states that
“ The impulse ( I ) over the time interval (t2-t1) equal the change in linear momentum of a particle during that interval.” [Impulse Momentum Theorem] The impulse of force is known even when the force itself may not be known. Again, from equatin(ii)
)(2112 iiiIvmvm −+= −
i.e. Final momentum ( )2vm of the particle may be obtained by adding vectorically its initial
momentum 1vm and the impulse of the force F during the time interval considered. Or, showing in vector form.
mV1
mV1
mV2
I1-2
I1-2
When several forces act on a particle, the impulse produced by each of the forces should be considered.
i.e. )(2211 ivvmIvm −=+ ∑ −
where, ( ) ( ) ∫ ∫∫∫ ∑∑ ++=++==−
2
1
2
1 21
2
1 321
2
121..........
t
t
t
t
t
t
t
tdtFdtFdtFFFdtFI
Improper Path Function

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -26
a1
F1
F2F2
m mF1
F
m
=0
(ma)rev 4.3 System of Unit: Units of measurement should be consistent and one of the standards should be followed. Generally 2 standard units are taken:
a) System de' International Unit (SI unit) b) U.S. Customary Units (used by American Engineers)
SI Units: SI stands for System de’ International. SI units are the world-wide standards for the measuring system. SI units are fundamental or derived. Fundamental and Derived Units: Fundamental and Derived units are the SI units. Fundamental units are independent of any other measuring units and are the basic units for all other system whereas Derived units are the units which are expressed in terms of powers of one or more fundamental units. Fundamental Units Derived Units Length = metre (m) Velocity = L/T = m/s Mass = kilogram (kg) Acceleration = V/T = L/T2 = m/s2 Time = second (s) Force = ma = ML/T2 = kgm/s2 (N) SI units are the absolute system of units and results are independent upon the location of measurement. US Customary Units: This system is not absolute system of unit. They are gravitational system of units. Base Units length = foot(ft) force = pound (lb) time = second (s) Conversion from US Customary Units to SI Units: length : 1 ft = 0.3048 m force : 1 lb = 4.448 N mass : 1 slug = 14.59 kg : 1 pound = 0.4536 kg 4.4 Equations of Motion and Dynamic Equilibrium

Downloaded from www.jayaram.com.np/ -27
yyxx
yx
avav
vyvx
==
==
&&
&&Q
&
&
Theorem sVarignon'-point the
about moment of sum is point aabout momentum Total
Y
Xo
xy
mVy
mVy
mVy
mV
Considering a particle mass ‘m’ acted upon by several forces. Then from second law,
( )kajaiamFiamF zyxˆˆˆ)( ++=⇒−= ∑∑
Using rectangular components, the equation of motions are
)(,, iimaFmaFamF zzyyxx −=== ∑∑∑
(i) and (ii) gives the equation of motion of particle under the force F or, zmFymFxmF zyx &&&&&& === ∑∑∑ ,,
Integrating these equation as done in 3.3, the equation of motion can be obtained. Again, the equation(i) may be expressed as
0=−∑ amF
i.e., if we add vector am− to the resultant force in opposite direction, the system comes under the
equilibrium state. This force ( am− ) opposite to the resultant force is called Inertial Force or Inertia Vector. This equilibrium state of a particle under the given forces and the inertia vector is said to be dynamic equilibrium. At the dynamic equilibrium, ∑∑∑ === 0&0,0 zyx FFF Inertia vector measure the resistance that particles offer when we try to set them in motion or when we try to change the condition of their motion. • Angular Momentum and Rate of Change (Angular Momentum Theorem) Statement “The rate of change of angular momentum of the particle about any point at any instant is equal
to the moment of the force ( )F acting on that particle about the same point.” Let a particle of mass ‘m’ moving in the XY-plane and the linear momentum of the particle is
equal to the vector .vm
The moment about O of the vector .vm (linear momentum) is called angular momentum of the particle about O
at that instant and is denoted by 0H
Now, mvx and mvy are components of .vm in x & y direction. Then, from definition, (+ H0=x(mvy)-y(mvx)
[ ] )()( iyvxvmH xyo −−=∴
Differentiating equ(i) with respect to time, we get:
( )xy yvxvdtdmH −=0
&

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -28
F1
F2 m
m
ma
F3
p
Fy
Fx = 0
W
( )xxyy vyvyvxvxm &&&& −−+=
= ( )xy yaxam −
OaboutForceofmomentH
yFxFH
ymaxmaH
xy
xy
=∴
−=
−=
&
&
&Q
[ ] ( )iimH −=∴ 0&
Thus, the rate of change of angular momentum of the particle about any point to any instant is equal
to the moment of force ( )F acting on that particle about the same point. i.5 Equation of Motion (a) Rectilinear motion of particles: If a particle of mass ‘m’ is moving in a straight line under the action of coplanar forces
etcFFF ,,, 321 Then the motion of particle can be written as
∑∑ ++=−= 321),( FFFFwhereiamF
For Rectilinear motion, motion is only along the single co- ordinate, i.e. ax=a & ay=0 ∴Equn-(i) may be written as
0=
=
∑∑
y
xx
F
maF - (ii)
These are the equation of motion for the particle moving in the straight line. (b) Curvilinear motion of particles:
i Rectangular components ii Tangential and Normal components iii Radial and Transverse Components
i. Rectangular components From Newton’s second law, ∑∑ == yyxx maFmaF ; For Projectile motion, neglecting air resistance ∑∑ =⇒==⇒= 000 xxxx amaFF
∑ −=−== mgwmaF yy
gm
mgaor y −=−=,
ga
a
y
x
−==∴ 0
(i)
These are the equations of motion.

Downloaded from www.jayaram.com.np/ -29
Fnat = dV dt
FT
man = V2
a
F = ma
m
Fr = mar
ii. Tangential and Normal components: From Newton’s 2nd law,
∑
∑
==
==
ρ
2vmamF
dtdvmamF
nn
tt
∑ ∑ ∑+= xt FFF
These are the equations of motion. iii. Radial and Transverse components: From Newton’s 2nd law,
∑ ∑ ∑∑∑
+=
+==
−==
θ
θθ θθ
θ
FFF
rrmmaF
rrmmaF
r
rr
)2(
)( 2
&&&&
&&&
`
These are the equations of motion. Note: In case of Dynamic Equilibrium all the components of forces are balanced by Inertial Vector or Inertia force. So, for dynamic equilibrium condition, the equation of motion becomes
∑∑∑∑∑∑
==
==
==
==
==
==
0
0
0
0
0
0
θθ maF
maF
maF
maF
maF
maF
rr
nn
tt
yy
xr
- (ii)
i.6 Motion due to Central Force-Conservation of Angular Momentum
When the force F acting on a particle P is directed towards or away from the fixed point O, the particle is said to be moving under a central force. The fixed point ‘O’ is called the center of force. As shown in the figure, particle P moves along the curve path. O = origin of co-ordinates Now,
Fr = Radial component of force F
θF = Transverse component of force F
For central motion θF = 0
( )
( ) ( ) 00,
021,
02
22
2
=⇒=
=+
=+=
θθ
θθ
θθθ
&&
&&&&
&&&&Q
rdrdtdor
rrrr
or
rrF
- (i)
- (iii)

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -30
Y
X
Z
F
dA rdPo
F
d rPr
Integrating both sides we get r2 θ&=constant=h - (i) Now, if elementary section are swept in time ‘dt’ be dA
θrdrdA .21
=Q [ ]01;/ →== θθ dforSRS
θdrdAor 2
21, =
[ ]dtbysidesbothDividing21
21, 22 θθ &r
dtdr
dtdAor ==
Here, .).( VAVelocityAreaorAreasweepingofchangeofRatedtdA
=
)(..221
21.. 2
iiVAh
hrVA
−=∴
== θ&Q
Thus, when a particle moves under the central force, the areal velocity is constant. This is also called Kepler’s Law Again, Angular momenum = momentum of linear momentum about the fixed point.
rmvH ×= θ0
Now, θθ
&rv =
rmrH θ&=∴ 0
)(20 iiimrH −=∴ θ&
[ ]
[ ][ ]tconsmtconsVAcetconsH
VAhVAmHorhrmhHor
tan&tan..,sintan..2.).(2,
,
0
0
20
===∴==
==Q
&Q θ
Hence, when a particle is moving under a central force, Angular momentum is always conserved. i.7 Newton’s Universal Law of Gravitation: Statement: Every particle in the universe attracts every other particle with a force, which is directly proportional to the product of their masses and inversely proportional to the square of the distance between their centers. Mathematically,
( ) ⎥
⎦
⎤⎢⎣
⎡−=∴
∝
min distance theis d kgin masses are M and m where,
2
2
id
GMmF
dMmF
Also, G is the Universal Gravitation constant with its value 6.673×10-11Nm2/kg2 and F is the force of attraction between them.

Downloaded from www.jayaram.com.np/ -31
For a body of mass ‘m’ located on or near the surface of earth, force exerted by the earth on a body equals to the weight of the body i.e. F = mg and d = R (radius of the earth).
F = mg = 2RGMm
( )iiR
GMg −= 2Q
where, g is the acceleration due to gravity with its standard value 9.81 m/s2 at the sea level. Since, earth is not perfectly spherical so the value of R is different and hence g varies according to the variation of altitude and latitude. i.8 Application in space mechanics: Earth satellite and space vehicles are subjected only to the gravitational pull of the earth after crossing the atmosphere. The gravitation force acts as a central force on them and hence their motions can be predicted as follows: From central force motion, ( )ihr −=θ&2 Trajectory of a particle under a central force:
Considering a particle P under central force F (i.e. directed towards center ‘O’) Then we have Radial component of force,
( ) )(2 iFrrmmaF rr −−=−==∑ θ&&&
And, Transverse component of force )(0)2( iirrmmaF −=+==∑ θθθθ
&&&&
From equ(ii) since m≠0 02 =+∴ θθ &&&& rr
( ) 01, 2 =θ&rdtd
ror
On integrating, )(tan2 iiihtconsr −==θ&
2rh
dtd
==∴θθ&
Again,
)(1.. 2 ivrd
dhddr
rh
dtd
ddr
dtdrr −⎟
⎠⎞
⎜⎝⎛−====
θθθ
θ&
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛−====∴
rddh
dd
rh
rh
dtd
drd
dtrdr 1.
drd. 22 θθθ
θθ
&&&&&
)(12
2
2
2
vrd
drhr −⎟
⎠⎞
⎜⎝⎛−=∴
θ&&
Putting values of getweiequinr )(& &&&θ

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -32
Frhr
rdd
rhm −=⎥
⎦
⎤⎢⎣
⎡−⎟
⎠⎞
⎜⎝⎛= 4
2
2
2
2
2 1θ
Putting getwer
v ,1=
Fuhd
uduhm −=⎥⎦
⎤⎢⎣
⎡+− 22
2
222
θ
( )viumh
Fud
ud−=+∴ 222
2
θ
This is second order differential equation, which is the trajectory followd by the particle which is
moving under a central force F . Note:
i. F is directed towards ‘O’
ii. Magnitude of F is +ve if F is actually towards O (i.e. attractive force)
iii. F should be ‘-ve’ if F is directed away from O. The trajectory of a particle under a central force is
( )iiumh
Fud
ud−=+ 222
2
θ
Again,
( )iiiGMmur
GMmF −== 22
where, M = mass of earth m = mass of the space vehicle
r = distance from the centre of earth to the space vehicle, u = r1
From equ (ii) & (iii)
)(constant222
2
2
2
ivh
GMumh
GMmuud
ud−===+
θ
This equn(iv) is second order differential equation with constant co-efficient .2 ⎟⎠⎞
⎜⎝⎛
hGM The general
solution of the differential equation is equal to the sum of the complementary i.e. U = Uc+Up wherem, Uc = A sinθ + B cosθ
Up = 2hGM
Again, Uc = A sinθ + B cosθ = C (cosθ cosθ0 + sinθ sinθ0) = C cos(θ-θ0)
( ) 20cosh
GMCU +−=∴ θθ
Uc = complementy solution i.e. for tangient condition Up = particular solution i.e. for steady state condition

Downloaded from www.jayaram.com.np/ -33
earth
satellite
trajectory of motion
e<1e<1
e>1e>1
Now,
choosing θ0 = 0 and [ ]symmetry of axis is line inital ..1 eir
U =
we, get:
( )vch
GMr
−+= θcos12
Again, we have the equation of conic section,
θcosel
lr+
=
( )vile
lr−+=∴ θcos11
Comparing equn (v) & (vi), we get:
clelec =⇒=
Again,
GMhl
hGM
l
2
2
1=⇒=
GMche
2
=∴ which is eccentricity of the conic section.
So, three cases may arise: a) If e>1 (i.e. conic is a hyperbola)
i.e. 2
2
,1h
GMcorGMch
>>
b) If e=1 (i.e. conic is a parabola)
i.e. 2
2
,1h
GMcorGMch
==
c) If e<1 (i.e. conic is an ellipse)
i.e. 2
2
,1h
GMcorGMch
<<
Special Cases: • When e=c=0 the length of radius vector is constant and the conic section reduces to circle. • At the last stage of launching satellite into orbit, it has the velocity parallel to the surface of the
earth and the satellite begins its free flight at the vertex ‘A’. Let, 00 ,vr be the radius vector and velocity at the beginning of free flight. Here, velocity reduces to
transverse components only. 000 θθ
&rvv ==∴
Again, ( )viirrh −== 0
20
2 θθ && 0002
0 vrrh == ω
Then from equn(v) ⎥⎦⎤
⎢⎣⎡ += θcos1
2 ch
GMr
vr ==
ωωθ&

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -34
o r A
Vofree flight
powered flight
At vertex ‘A’, θ=0, r=ro and v=vo
( )( ) [ ]10cos1
2000
=−−=∴ viiivr
GMr
c
For parabolic trajectory, 2hGMc =
)(220
ixvr
GMc −=∴
From equn(viii) & (ix)
( )xrGMv
rvrGMor
vrGM
rvrGM
−=∴
=
−=
00
020
20
20
200
20
20
2
12,
1
This velocity v0 is called the escape velocity. Since, this is the minimum velocity required for the vehicle so that it does not return to its starting point.
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
=∴==∴
2
2
0
2
0
22
RGMmmg
gRGM
rgR
rGMVesc
( )xirgRVesc −=∴
0
22
Note: If Vo>Vesc, trajectory will be hyperbolic Vo=Vesc, trajectory will be parabolic Vo<Vesc, trajectory will be elliptical Among the elliptical orbit, if c=0 then the ellipse reduces to circle. i.e. putting c=0 in equn(viii), we get
0
20
200
1r
GMvvr
GMr circ =⇒=
( )xiir
gRvcirc −=0
2
Perigee and Apogee The closest point of the orbit from the earth is called perigee and the farthest point of orbit from the earth is called apogee.
(ii) For Vcirc<Vo<Vesc, A=perigee and A'=Apogee (iii) For Vo<Vcirc, A=apogee and A"=perigee (iv) For Vo<<Vcirc, the vehicle doesn’t go to orbit.

Downloaded from www.jayaram.com.np/ -35
AA”A’
Vo=VeseVo=Vcir<Vese
Vo=VcirVo<Vcir
Vo<<Vese
a B
b
O’
V1 A”
A”
Vo
V1
O
B
A’
AA’
ror1
r’
500km
V0
Time Period (or Periodic time) of Space Vehicle It is the time required for the satellite to complete its orbit and is denoted by τ .
( )Velocity Area
ellipse of Area i.e.orbit inside Area=τ
2habπτ =
( )xiiihabor −=
πτ 2,
where, a = semi-major axis of ellipse = 2
01 rr +
b = semi-minor axis of ellipse = 10rr
h = 00vr
Tutorials: 1) A satellite is launched in a direction parallel to the surface of the earth with a velocity of 37000 km/hr from an altitude of 500 km. Determine the altitude attained by it when it covers the angular distance equal to 135°. Also calculate the periodic time of the satellite. Take radius of earth, R=6370 km. Soln:- Here, Launching velocity (vo) = 37000 km/hr = 10277 m/s Radius of earth (R) = 6370 km = 6.37 × 106 m Altitude of launching (h) = 500 km = 5 × 105m Then, ro = 6.37 × 106 + 5 × 105 = 6.87 × 106 m h = rovo = 6.87 × 106 × 10277 = 7.06 × 1010 GM = gR2 = 9.81 × (6.37 × 106)2 = 3.98 × 1014 m3/s2
( )
8210
14
2 1098.71006.71098.3 −×=
×
×=∴
hGM
We know, ( )ich
GMr
−+= θcos12
At point ‘A’ θ=0 and r=ro=6.87×106
c+×=×
−86 1098.7
1087.61
Q
810576.6 −×=∴c Again, at θ=135°
kmrr
44.30029'135cos10576.61098.71 88 =⇒°×+×= −−

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -36
A
700kg
c
300kg
D
T1
T2
T1
T2
WA400kg
F.B.D of A
mBaB
300kg
WB
∴ Altitude gained by satellite (H) = r'-R = 23659.44 km Again, to calculate time period: When the satellite covers 180°, it will make
kmrr
07.71255
10576.61098.71
1
88
1
=⇒
×+×= −−
Then, kmrr
a o 54.390472
07.7122568702
1 =+
=+
=
kmrrb o 49.221201 =×=
QTime period of the satellite, 10
63
1006.71049.221201054.3904722
×××××
==ππτ
hab
secmin2618hrs12sec10670647.4 4
=×=∴
ττ
2. The two blocks shown in the figure start from rest. The horizontal plane and the pulleys are frictionless, and the pulley is assumed to be of negligible mass. Determine the acceleration of each block and the tension in each cord. Soln: Let, tension in the cord ACD be T1 & cord BC be T2. From figure, if block ‘A’ moves through distance SA then block ‘B’ moves through SA/2.
( )iaaVVSS AB
AB
AB −=⇒=⇒=
222Q
Using Newton’s 2nd law for Block ‘A’, Block ‘B’ and Pulley ‘C’ Block ‘A’:
( )iiaTamF
A
AAx
−=
=∑1001
Block ‘B’:
( )iiiTTaT
aTW
amF
A
BB
BBy
−=−∴=−×
=−
=∑
022/30081.9300
300
12
2
2
Pulleys Since mass of pulley is considered zero, we have:
( )ivTT
amF ccy
−=−
==∑02
0
12
Putting values of T1 & T2 in equn (iv), we get:
2943-1500A-2×100aA=0 2/41.8 smaA =Q
2/42052
smaa AB ==∴

Downloaded from www.jayaram.com.np/ -37
NTT
NaT A
16822841100
12
1
====Q
3. The bob of a 3 m pendulum describes an arc of a circle, in a vertical plane. If the tension is twice of the weight of the bob for the position when it is displaced through an angle of 30° from its mean position, then find the velocity and acceleration of the bob. Soln: Applying Newton’s Second Law, ∑ = tt maF
2/9.430sin
30sin,
smga
mamgor
t
t
=°=∴
=°
Again, ∑ = xx maF
xmamgmg =− 30cos2
[ ] 22
122
2
/15.12
/12.1130cos2
smaaa
smgga
rt
x
=+=∴
=°−=Q
°== − 22.36tan 1
t
n
aa
β
Velocity of Bob ( ) ⎥⎦
⎤⎢⎣
⎡==
ρρ
2vaav xx
chordthetoperpv
v.sec/78.5
12.113=
×=Q
4. The motion of a 500 gm Block ‘B’ in a horizontal plane is defined by the relation r=2(1+cos2πt) and θ=2πt, where r is expressed in meters, t in seconds and θ in radians. Determine the radial and transverse component of the force exerted on the block when t=0 & t=0.75 sec. Soln: Here, m = 500 gm = 0.5 kg r = 2(1+cos2πt) - (i) θ = 2πt - (ii) Differentiating with respect to time, we get r& = -4π sin2πt πθ 2=&
02cos8 =−= θππ &&&& tr Now,
( )( )∑
∑+==
−==
θθ
θ
θθ&&&&
&&&
rrmmaF
rrmmaF rr
2
2
When, t = 0, r = 4, 28&0 π−== rr &&&
0&20 === θπθθ &&&

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -38
( )
( )0
0202045.043.118
4485.0 22
=
=××−×=
−=
×−−=
∑
∑
θ
θ π
ππ
FF
NFF
r
r
Q
Q
Similarly for t = 0.75 sec, NFNFr 0.79,5.39 =−= θ
025.1204
===
===
θπθπθ
π&&&
&&& rrr

Downloaded from www.jayaram.com.np/ -39
F
A
A’A
FFsin
Fcosdr
ds
Fcos
U1-2
S1 S2
F
A2
A1x
Y1Y
Y2A1
w
A2
Chapter – 5 Kinetics of Particle : Energy and Momentum Method
5.1 Work done by a Force:
When a particle moves by the application of force F producing the displacement ds, then the work done by the force during the displacement ds is defined by: du = component of force along the direction of motion × distance travelled.
( )iFdsdudsFdu
−==
αα
cos..cosQ
where, rdds =
[ ]motion ofdirection and force ebetween th angle theis α Particular cases:
(a) When F is along the direction of rd , then [ ]10coscos === αFdsdu
(b) If F is perpendicular to the direction of rd , then [ ]090coscos0 === αdu (c) For finite work done from s1 to s2, Integrating (i), we get:
( ) ( )iidsFUs
s−= ∫−
2
1
cos21 α
s-Fcos curve under the Area21 α=−U 5.1.1 Work of a const Force in Rectilinear Motion
( ) xFU ∆=− αcos21
[ ]MotionctilinearAx
RetoA fromnt Displaceme 21=∆
5.1.2 Work of a weight (or Force of gravity) The work du of the weight is equal to the product of weight (w) and the vertical displacement of the center of gravity G of the body. i.e. du = -wdy
( )ywU
yywU
wdyduy
y
∆−=∴−−=
−=∴
−
−
− ∫
21
1221
212
1
U1-2 is -ve when work is done on the body U1-2 is +ve when work is done by the body.

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -40
x1
x2
Ao
A1
A2
5.1.3 Work of a force exerted by a spring
When a spring is deformed, the magnitude of force F exerted by it on the body is proportional to the elongation of the spring. i.e. F = kx - (i) where, k = spring constant x = elongation length Again, Elementary work du = -Fdx = -k×dx ∴ finite work done during elongation from x1to x2
( )2
12221
21
21
2
1
xxkU
dxkUx
x
−−=
×−=
−
− ∫
work is positive, when x<x, i.e. spring is returning. 5.1.4 Work of the Gravitational Forces: We have,
( )ir
MmGF −= 2
Now, the elementary work
( ) [ ]motion ofdirection in opposite directed is F sin2 ceiidrr
GMFdrdu −−=−=
So, the work for finite displacement
( )iiirr
GMmdrr
GMmUr
r−⎟⎟
⎠
⎞⎜⎜⎝
⎛−=−= ∫−
12221
112
1
( ) ⎥⎦
⎤⎢⎣
⎡
>==
−⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−=∴ − RrHere
wRmgRGMmivwR
rrU
,11 22
2
1221
Q
5.2 Kinetic Energy of a Particle:
For a mass ‘m’ acted upon by a force F and moving along the curve path, the component of force along the direction of motion is given by:
∫∫ =
=
⎥⎦
⎤⎢⎣
⎡====
=
2
1
2
1
cos
get welimits takingsides,both gIntegratincos,
cos,
v
v
s
s
t
tt
vdvmdsF
mvdvdsFordsdv
vdtds
dsdv
dtdv
adsdv
mvFor
maF
α
α
α Q

Downloaded from www.jayaram.com.np/ -41
)(,21
21,
21
21,
1221
21
2221
21
2221
iTTUor
mvmvUor
mvmvUor
−==
−=
−=
−
−
−
where, T2 and T1 is final and initial K.E. of the particle.
Hence, the work of the force F is equal to the change of K.E. of the particle. This is also called as principle of work and energy. 5.3 Applications of Principle of work and energy: With the help of work energy principle, solution of problems, involving force, displacement and velocity can be obtained in simple form, e.g. Analysis of Pendulum To determine the velocity of bob as it falls freely from A1 to A2, we’ve wLU =−21 Again, at KE at A1 ]0[0 11 == VT Q KE at A2
222 2
1 mvT =
Now, using principle of work and energy, 2112 −=− UTT
[ ]point reference from bob ofheight vertical theis 2
21,
2
22212
LgLv
mgLwLmvUTor
=∴
==⇒= −
Advantages of this method: To find v2 it is not necessary to find a2 Equation is in the form of scalar, hence it is easy to handle. Forces which do not work (e.g. Tension on strings), etc are eliminated.
5.4 Power and Efficiency:
Power is defined as rate of change of work.
( ) ( )
dtdsFP
dsαFdui
∆ttuPavg
αcos
cos Putting,dtduP
get we0 aslimit Taking ,
=
=−=
→∆∆
=
( ) ⎥⎦⎤
⎢⎣⎡ =−= V
dtdsiiFVPor αcos,
where, V is magnitude of the velocity at the point of application of force F .

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -42
( )workInputworkOutputEfficiency =η
[ ]friction todue losses todue1, <=inputPoweroutputPoweror η
5.5 Potential Energy:
Consider a body of weight W, which moves along a curve path from A1 to A2. Qwork done due to weight during the displacement, ,2121 WyWyU −=− Then, work at any position, ( )iWyU −= The work done by gravity is independent of path and is proportional to position, work done by gravity at any position is denoted by Vg. ( ) ( ) ( )iiVVU gg −==− 2121
And, ( ) WyVwhereiiiVU gg =−=
If (Vg)2>(Vg)1 then work is –ve (i.e. PE increases) If (Vg)2<(Vg)1 then work is +ve (i.e. PE decreases) (a) Potential Energy of Gravitational Force: We know that work of Gravitational Force, when the body is displayed from A1 to A2,
i.e. ⎥⎦
⎤⎢⎣
⎡−−=−
2121 r
GMmr
GMmU
Then, work done at any position, ( )ir
GMmU −−=
Again, we know that work done, ( )iiVU g −=
From (i) and (ii)
( )iiir
GMmVg −−=
( )ivr
wRV
wRGMmR
GMmwmgF
g −⎥⎦
⎤⎢⎣
⎡−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=∴
===
2
2
2
r is the distance of the body from the center of the earth. For large value of r, 0→gV
(b) Potential Energy due to spring: The work of force exerted by the spring on the body for the elongation from x1 to x2
( )
( )[ ]1221
21
2221
)(,21
21
ee VVUor
ikxkxU
−==
−⎟⎠⎞
⎜⎝⎛ −−=
−
−

Downloaded from www.jayaram.com.np/ -43
When, (Ve)1 and (Ve)2 is the PE due to elastic force, then potential energy at any elongation of spring x
( )iikxVe −= 2
21
During the elongation the potential energy of the spring increases. The work of the force is independent of the path followed and is equal to minus charge of
potential energy. i.e. ( ) ( )iiiVVU −−−=− 1221 The force which satisfy the equation is called as the conservation force. The gravity force and the elastic force are examples of conservative force. 5.6 Conservation of Energy: We know, work of a force is equal to
( )
[ ]PE thebe)(1221
1221
ViVVUVVU
−+−=∴−−=
−
−
Again, work of a force is equal to change in KE [ ]KE thebe )(1221 TiiTTU −−=∴ − From (i) and (ii)
( )iiiEE
VTVTTTVV
−=∴+=+−=−
21
2211
1221
where, E = T+V = mechanical energy of the system. Hence, conservation of energy states that mechanical energy of the system always remains constant. Examples of Conservation of Energy: Analysis of Pendulum For free fall of pendulum from Al, Then For position A1, KE, T1 = 0 [ V1 = 0 ] PE, V1 = wL ∴ T1 + V1 = wL - (i)
At position A2,
V2 = gL2
∴KE at A2 (T2) = ( ) wLgLgwmv =⎟⎟
⎠
⎞⎜⎜⎝
⎛= 2
21
21 2
2
PE at A2 (V2) = 0 [ L = 0 at A2, datum] ( )iiwLVT −=+∴ 22
For position A
KE at A, (TA) = θθ sinsin221
21 2 wLgL
gwmVA =⎟⎟
⎠
⎞⎜⎜⎝
⎛=
PE at A (VA) = ( ) θsin' wLwLLLw −=−

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -44
∴ TA + VA = wL - (iii) From equation (i), (ii) and (iii), the total mechanical energy of pendulum at any position is same and is equal to wL. At A1, Total energy is entirely due to PE At A2, Total energy is entirely due to KE At A, Total energy is sum of PE + KE Note: For the system interacting with other forms of energy as electrical, frictional, etc all the forms of energy should be considered. In that case as well the total energy of system is always conserved. Hence, energy is conserved in all the cases. 5.7 Principle of Impulse and Momentum:
Considering a particle of mass ‘m’ acted upon by a force F . Then from Newton’s 2nd Law,
amF = In x & y components,
dtdv
mFdt
dvmF
maFmaF
yy
xx
yyxx
==∴
==
&
&
Since mass ‘m’ is constant
( ) ( )imvdtdFmv
dtdF yyxx −==∴ )(&
Vectorically, we have
( ) ( )iivmdtdF −=
This equation states, “Force F acting on the particle is equal to the rate of change of momentum
( )vm of the particle. Multiplying equation (i) by dt and integrating on both sides, we get:
( ) ( )122
1
2
1xx
v
v x
t
t x mvmvdvmdtF −== ∫∫
( ) ( ) ( )iiimvdtFmv x
t
t xx −=+∴ ∫ 212
1
Similarly,
( ) ( ) ( )ivmvdtFmvt
t yyy −=+ ∫21
2
1
In vector form,
( )⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
+=
+=
+=
−=+ ∫yx
yx
yxt
t
FFF
vvv
vvv
vmvdtFvm22
11
2
12
1
21
where,

Downloaded from www.jayaram.com.np/ -45
Line of contact
Line of impact
A BBAVA
CA CB
CA CB
VA VB
VB
Impact/actionLine of
(a) direction central impact (b) oblique central impact
( )21 force of Impulse2
1 −==∫ mp
t
tIdtF
Given, by area under the curve F-t Hence,
( ) ( )vivmIvm mp −=+− 2211
From vector diagram, When several forces are acting on a particle,
( ) ( )viivmIvm mp −=+−∑ 2211
5.8 Impulsive motion and Impact (1) Impulsive Motion: When a very large force is acted during a very short time interval on a particle and produce a definite change in momentum, such a force is called as impulsive force and the resulting motion is called impulsive motion. Example of Impulsive motion:
Striking the ball with a cricket bat, large force ( )F is applied in a small time ( )t∆ , the resulting
impulse tF∆ is large enough to change the direction of motion of ball.
+ =
mV1 F tmV2
From impulse momentum principle,
( )ivmtFvm −=∆+ 21 Here non-impulsive forces (like weight of ball, bat, etc) are not included. 2. Impact A collision between two bodies, which occurs in very short interval of time and during which the two bodies exert relatively large forces on each other is called an Impact. The common normal to the surfaces in contact during the impact is called the line of impact or line of action. Types of Impact: • If the mass centers of the two colliding bodies are located on this line of impact, the impact is
central impact otherwise eccentric impact. • If the velocities of the two particles are directed along the line of impact, it is said to be direct
impact. If either or both particle moves along the line other than the line of impact, the impact is said to be an oblique impact.
Hence, four types of impact may occur. They are:
a) Direct Central Impact b) Oblique Central Impact c) Direct Eccentric Impact

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -46
A A
CA CA
CB
CB VA
VA VB
VB
BB
Line ofimpact
(c) direct ecentric impact (d) oblique ecentric impact
+ =mAvA pdt mAv
+ =mAvARdtmAv
d) Oblique Eccentric Impact 5.9 Direct Central Impact: • Two particles A and B of mass mA and mB are moving in a straight line with velocities vA & vB.
If vA>vB the particle A strikes B. • Under the impact, they deform and at the end of period of deformation they will move with the
same velocity u. • After the impact the particles may gain their original shape or are permanently deformed,
depending upon the magnitude of impact and material involved which is called restitution. • After the impact and separation the particles move with '' and BA vv velocities.
• The duration of time of impact when the particles comes under the deformation and restitution during impact is called deformation period and restitution period respectively.
U
VA VB
A A AB B B VA VB
Considering that only impulsive forces are acting, the total momentum of the system is conserved.
i.e. ( )ivmvmvmvm BBAABBAA −+=+ '' In scalar form, ( )iivmvmvmvm BBAABBAA −+=+ '' +ve value is for +ve axis and –ve value is for –ve axis. Analysis during Impact Following phenomena will occur for the particle A.
( ))(' ivvmRdtum
iiiumpdtvm
AAA
AAA
−=−
−=−
∫∫
where, ∫ ∫ dtRdtp and are the impulses during the period of deformation and restitution respectively.
Then the co-efficient of restitution is defined as:
( )vPdt
Rdte −=
∫∫

Downloaded from www.jayaram.com.np/ -47
Value of e depends upon • Materials of particles • Impact velocity • Shape & size of colliding bodies Generally, 0<e<1 For perfectly elastic collision, e = 1 For perfectly plastic collision, e = 0
From equ(iii), umvmPdt AAA −=∫
From equ(iv), 'AAA vmumRdt −=∫
uvvue
uvvu
umvmvmum
Pdt
Rdte
A
A
A
A
AAA
AAA
−−
=∴
−−
=−
−==
∫∫
'
''
Q
Similarly for particle B,
( )viivuuveB
B −−−
='
Adding respectively the numerators and denominators of equn (vi) and (vii), we get:
BA
AB
BA
BA
vvvv
vuuvuvvue
−−
=−+−−+−
=''''
( ) ( )viiivvevv BAAB −−−−∴ '' i.e. Relative velocity after impact = e × Relative velocity before impact For Perfectly Plastic Impact: e=0, i.e. there is no period of restitution. from equ(viii), ( )ocitycommon vel''' vvv AB == Then from equ(ii) ( ) 'vmmvmvm BABBAA +=+
( ) ( )ixmm
vmvm
BA
BBAA −++
=∴ 'vocity Common vel
For Perfectly Elastic Impact: Since e=1, from equ (viii), ( )xvvvv BAAB −−=− ''
from equ (ii), ( ) ( ) ( )xivvmvvm BBBAAA −−=− ''
from equ (x) ( )xiivvvv BBAA −+=+ '' Multiplying LHS and RHS of equ(xi) & (xii) respectively and dividing both sides by 2 we get:
( )( )[ ] ( )( )[ ]BBBBBAAAAA vvvvmvvvvm +−−+− ''''
21
21
22'2'2
21
21
21
21, BBBBAAAA vmvmvmvmor −=−

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -48
( ) ( )2'2'22
21
21
21
21, BBAABBAA vmvmvmvmor +=+
i.e. Initial KE of system = Final KE of system • Hence, for perfectly elastic condition, KE of the system is conserved. • When e≠, there is loss of KE and this lost energy is converted into heat, sound and other forms of
energy. 5.10 Oblique Central Impact: When the velocities of the two colliding bodies are not directed along the line of impact, then it is called oblique impact as shown in the figure.
V1
V1m1
m2V2
V2
m1
m2
1
1
1
2
XLine of contact
Here, line of impact is along y-axis and line of contact is along x-axis. Then the following phenomena occur. (a) x-component of the momentum of the particle 1st is conserved i.e. ( )ixvxvvmvm xx −=⇒= '
11'1111
(b) x-component of the momentum of 2nd particle is conserved i.e. ( )iivxvvmvm xxx −=⇒= '
22'2222
From (a) and (b) [ ] [ ]'2
'121 xx vvxvxv −=−
(c) From (a) and (b), the total momentum of the particles in x-direction is also conserved i.e. ( )iiivmvmvmvm xxxx −+=+ '
22'112211
(d) y-component of total momentum of the particle is conserved. i.e. ( )ivvmvmvmvm yyyy −−=+− '
22'112211
(e) y-component of relative velocity after impact is obtained by multiplying y-component of relative velocity before impact by co-efficient of restitution.
i.e. ( ) ( )
( ) ( ) ( )vvvevv
vvevv
yyyy
yyyy
−+=+∴
−−=−−
21'1
'2
21'1
'2
The above five equation are applied for the analysis of the problems related to oblique impact. Remember:
(a) Along the line of contact, momentum of each particle is conserved. (b) Along the line of impact, the total momentum of particles is conserved.
Tutorials:

Downloaded from www.jayaram.com.np/ -49
200mm1
Datum
150mm
2
0.5kg
0.4kg
B
A
M1
M2
V
30o
(a) A 10 kg collar slides without friction along a vertical rod. The spring attached to the collar has an undeformed length of 100 mm and a constant of 500 N/m. If the collar is released from rest in position 1, determine its velocity after it has moved 150mm to position2. Solution: Given, K = 500 N/m Undeformed length of spring = 100mm = 0.1m We have from conservation of energy, KE + PE at 1 = KE + PE at 2 i.e. )(2211 iVTVT −+=+
[ ]
( )
NmV
V
kxVVV
VT
ge
5.2
1.050021
21
00
1
21
211
11
11
=
××=∴
=+=
==
Again,
( ) ( )
Nmv
wykx
vvv
vvY
ge
09.9
15.081.91015.05002121
51021
2
2
22
2
22
222
22
−=
−×+××=
+=
+=
=××=
Putting all the values in equ(1), we get smvv /52.109.955.20 2
22 =⇒−=+
2) A particle having mass 0.5 kg is released from rest and strikes. The stationary particle of mass 0.4 kg as shown in the figure. Assume the impact is direct and elastic. If the horizontal surface has a dynamic co-efficient of friction 3.0=µ , locate the final position of each mass from the origin of the axis. Solution: Applying conservation of energy at Pt. A & B Lost of energy = work done against friction Now for mass m1, KE at A (TA1) = 0 [vA=0] PE at A (VA1) = mghA = 0.5×9.81×(0.25-0.25sin30°) (VA1) = 0.613 J
KE at B (TB1) = 21
21
21 25.025.0
21
21
BBB vvmv =×=
PE at B (VB1) = 0 [B is datum] Now, from conservation of energy,
datumat 01.01.02.0
1at spring of elongation
1
21
1
==−=
=
gvx
x
At point 2, the total length of spring is ( ) ( )
15.01.025.025.015.02.0
2
22
=−=∴
=+
x

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -50
smvvor
VTVT
BB
BBAA
/56.1025.0613.00,1
1111
2 =⇒+=+
+=+
( ) sm /56.1vB pt.at Mat Velocity 1B1 =∴
Now, at the point of impact Velocity of m1 before impact (v1) =
1Bv = 1.56 m/s
Velocity of m1 after impact ( ) '1
'1 vv =
Velocity of m2 before impact (v2) = 0 Velocity of m2 after impact '
2'2 )( vv =
Now, for direct impact
( )ivvor
vvor
vmvmvmvm
−=+
×+×=+×
+=+
78.04.051.0,
4.05.0056.15.0,
2'1
'2
'1
'22
'112211
Again, we have:
( )iivv
vvvvvve
−=−∴
−−
==−−
=
56.1
056.11
'1
'2
'1
'2
21
'1
'2
Solving equ(i) and (ii), we get:
smv
smv
/733.1
/173.0'2
'1
=
=
Now, using work energy relation to find the distance travelled by the particle For M1: Work done due to friction = ( )iiiVT −∆+∆ (Energy lost due to friction)
( ) J
T
00748.0173.05.0210
KE Initial - KE Final2
1
−=××−=
=∆
[ ]001 ==∆ hV ∴work done due to friction for mass m1 = JVT 00748.0−=∆+∆ For M2:
( )
JVTV
JT
60065.00
60065.0733.14.0210
2
22
−=∆+∆∴=∆
−=××−=∆
Now, Work done due to friction = travelleddistance×− mgµ
mgµfriction todue donework -(x) travelleddistance =∴
For mass 1,

Downloaded from www.jayaram.com.np/ -51
line of contact
VA = 9m/s VB = 9m/s
m m
A B
30o 60
o
( )
( )
mx
x
mx
mx
510.081.94.03.0
6065.000508.0
00508.081.95.03.0
00748.0
2
2
1
1
=××
−−=
=
=××
−−=
3. The magnitude and direction of the velocities of two identical frictionless balls before they strike each other as shown. Assuming e=0.90 determine the magnitude and direction of the velocity of each ball after the impact. Solution:
smVVsmVV
smVVsmVV
BBy
BBx
AAy
AAx
/6.1060sin/1.660cos
/5.430sin/8.730cos
=°=−=°−=
=°==°=
Now, in oblique impact For motion along the line of contact,
smVVAnd
smVV
ByBy
AyAy
/6.10,
/5.4'
'
==
==
For motion along the line of impact,
[ ]
)(7.1
1.68.7''
''
''
''
iVV
VV
VVVV
mmVmVmVmVm
BxAx
BxAx
BxAxBxAx
BABxBAxABxBAxA
−=+∴
+=−⇒
+=+⇒
=+=+
Again, AxBx
AxBx
VVVV
e−−
=''
( )
( )25.12
5.12)1.6(8.790.0''
''
−=−∴
=−−=−
AxBx
AxBx
VV
VVQ
Solving (1) and (2), we get: 4.5&1.7' −== VVBx
Resultant Motion: Adding components of velocities after impact, we get:
( ) ( )( ) ( ) smVVV
smVVV
AyAxB
AyAxA
/8.12
/72'2''
2'2''
=+=
=+=

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -52
o
o
o
o
Fifij
fik
fjk
Chapter – 6
System of Particles 6.0 System of Particles: From Newton’s law, equation of motion for each particle is
( )∑ ∑ ∑ ∑ −===⇒= imaFmaFmaFamF zzyyxx &,
And for Dynamic Equilibrium, ( )∑ ∑ ∑ −=== iiFFF zyx 0&0,0
But, for the system involving a large no. of particles, and if the system as a whole is considered, then each particle of system is subjected to two types of forces: (a) External Forces: Forces exerted by the body outside the system and weight of particle. (b) Internal Forces: [Vanderwaal’s Molecular Attraction] Forces exerted by the other particle of the same system.
y y
x x
zz
o o
PiPi Pj
Pk
Fi fij
fjkfik Fimiai
Pj
If P1 be a particle in a system of particles Pj, Pk, etc and Fi be the resultant of external forces on ith particle and Fij
, Fik be the internal forces on ith particle from jth and kth particle. Then,
The sum total of forces on ith particle sum of external and internal forces acting the particle. Now, from Newton’s 2nd law, the resultant of forces acting on the ith particle is equal to miai. When all the particles are considered simultaneously the internal forces cancel out and the only external forces acts on the system. Hence, for the whole system
( )( )( ) ∑∑
∑ ∑∑ ∑
=
=
=
textz
yexty
xextx
maF
maF
maFQ
- (iii)
6.1 Newton’s Law and System of Particles: Applying Newton’s 2nd law for the ith particle, we have:
force Internal force External +=dtvd
m ii
( )iFFrdtdm
n
jij
ijiii −+= ∑≠=1
2
2

Downloaded from www.jayaram.com.np/ -53
For all n particles the equation (i) can be written as:
( )∑∑∑∑=
≠===
−+=n
i
n
jij
ij
n
ii
n
i
ii iiFF
dtrd
m1 111
2
2
For considering all particles the summation of internal forces is zero. Hence, equ(ii) modifies as :
⎥⎦
⎤⎢⎣
⎡== ∑∑
==
FFdt
rdmF
n
ii
n
i
ii
112
2
Q
( )iiirmdtdFor
n
iii −= ∑
=12
2
,
If, cr be position vector of mass centre of system of particles and M is the total mass of particles,
then from principle of first moment of inertia (moment due to entire mass = sum of moments due to individual mass),
( )ivrMrM iic −= ∑
From (iii) and (iv), we get
( )
( )vdt
rdMF
rMdtdF
c
c
−=⇒
=
2
2
2
2
6.2 Linear and Angular Momentum for a system of particles (1) Linear Momentum for a system of particles: For a system of particles, applying Newton’s 2nd law to any jth particle, we have:
( )∑=
−=n
j
jj i
dtvd
MF1
Multiplying (i) by dt and integrating from t1 to t2, we get:
( )iiVMVMIdtFt
n
jjj
t
n
jjjext
t
t−⎥
⎦
⎤⎢⎣
⎡−⎥
⎦
⎤⎢⎣
⎡== ∑∑∫
==12
2
1 11
This shows, “The impulse of the total external force on the system of particles during a time interval equals to the sum of the changes of the linear momentum vector of the particles during the same time interval.” From the concept of mass center,
( )∑=
−=n
jjjc iiirMrM
1
Differentiating with respect to time, we get
( )∑=
−=∴n
jjjc ivVMVM
1
From (ii) and (iv),
( )vVMVMdtFIt
t ccext −−== ∫ 1
2
1 2 )()(
Thus, the total external impulse of a system particles is equal to the change in linear momentum of the particles, moving with the mass center velocity.

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -54
z
x
y
fij
o
oo
o
o
oM
r1 rc
2. Angular Momentum For a system of particles: Angular Momentum of ith particle,
( )
( ) iiiiiii
iiiii
marPrdtdrvm
Prdtdrvm
×==×=Η∴
=×=Η
&
For system of particles the angular momentum equation for the ith particle about origin ‘O’ is given by:
[ ] ( )iPrdtdFrFr ii
n
jijiii −×=⎥
⎦
⎤⎢⎣
⎡×+× ∑
=1
where, particle of momentumLinear =iP
For the system of n particles, equn(i) becomes:
( ) ⎥⎦
⎤⎢⎣
⎡=×=×+× ∑∑∑∑
==≠==
n
ioii
n
i
n
jj
iji
n
iii Fr
dtdFrFr
11111
µ&
Since, internal force vanishes for all particles, the moment also become zero for all particles. Hence,
[ ] ( )iiMMFr ooo
n
iiio −=⇒=×= ∑
=
µµ &&1
Similarly for any other fixed point ‘A’,
( )iiiM AA −= µ& Thus, the total moment of external forces acting on an aggregate of particles about a fixed point ‘A’ in an inertial reference equals the rate of change of the angular momentum relative to the same point A and same inertial reference. Again, considering center of mass of the aggregate of particles For ith particle, [ CG w.r.t.i ofposition →ciρ ]
( )ivrr cici −+= ρ
Now, the angular momentum for aggregate particle about ‘O’ is then,
[ ]momentumlinearppr i
n
iiio =×=Η ∑
=
Q1
( ) ( ){ }[ ] ( ) ⎥⎦
⎤⎢⎣
⎡+=−=
−+×+=Η ∑= cici
iiiiin
iciiicico
rrvmvmp
vvmvorρ
ρρ&&&
&&&
&,
1
Carrying out the cross-product and extracting cr from the summation we get:
[ ]( ) ( ) ( ) ( )∑∑∑∑
∑
====
=
×+×+×+×=
×+×+×+×=Η
n
iciicic
n
icii
n
iciic
n
icic
n
iciiciciciciiccico
mrmmrrmr
mrmmrrmr
1111
1
ρρρρ
ρρρρ
&&&&
&&&
We know that the sum of the first moment of mass about the centroid is zero i.e.
Thenρmm ciicii ,0 hence and0∑ ∑ == &ρ

Downloaded from www.jayaram.com.np/ -55
( ) [ ]∑ ∑=
=×+×=n
iiciicicco MmmrMr
1ρρµ &&
[ ] ( ) [ ]ciicucccco mvrMr ρρµµµ &Q& ×=−+×=
where, cµ be the sum of the angular momentum about the center of mass .Similarly for any point
‘A’, we get:
[ ] ( )virMr cACACA −+×=∴ µµ &
where, ACr& is the velocity of center of mass relative to fixed point A = ACV
Now, differentiating equn(vi) with respect to time, we get:
[ ] ( ) ];[, ACACAAcACACA
cACACA
aVMviiaMrMor
VMr
==−+×=
+×=
µµ
µµ
&&
&&&
6.3 Motion of mass center of a system of particle:
Center of mass for particles is not the center of mass of system. We know that (from 6.0) for system of particles
( ) ( )( ) ( )( ) ( )∑∑
∑∑∑∑
=
=
=
zextz
yexty
xextx
maF
maF
maF
(i)
If mass center of the system of particles is considered with co-ordinates ( ),,, zyxG Then we have:
( ) ( )( ) ( )( ) ( )∑∑
∑∑∑∑
=
=
=
mzzm
myym
mxxm
(ii)
Differentiating equ(ii) twice with respect to time, we get:
( ) ( )( ) ( )( ) ( )∑∑
∑∑∑∑
=
=
=
zmzm
ymym
xmxm
&&&&
&&&&
&&&&
⇒
( ) ( )( ) ( )( ) ( )∑∑
∑∑∑∑
=
=
=
zz
yy
xx
maam
maam
maam
- (iii)
where, zyx aaa &, are the components of acceleration a of G (i.e. center of mass) of the system,
From equ(i) & equ(iii), we have:
( ) ( )( ) ( )( ) ( ) zextz
yexty
xextx
amF
amF
amF
∑∑∑∑∑∑
=
=
=
- (iv)
which defines the motion of center of mass of system. It shows that the center of a system of particles move as if the entire mass of the system and all the external forces were concentrated at that point G. 6.4 Conservation of Momentum: We know that the final momentum of the particle is obtained by adding vectorically its initial
momentum and the impulse of the force F during the time interval considered i.e.
i.e. component of moment due to entire mass = component of sum of the moment due to individual mass

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -56
o o o
o o
oo
o
o
z
y
XVi
Vc
cini
o
C.ciV
( ) ( )ivmIvm mp −=+ − 2211 Considering system of particles,
( ) ( )iivmIvm mp −=+ ∑∑∑ − 2211
since the internal forces vanish considering the all particles only impulse due to external force exists i.e.
( )( ) ( )iiivmIvmextmp −=+ ∑∑∑ − 2211
When the impulse of external forces is zero, then equ(iii) becomes,
∑ ∑ −= )(21 ivvmvm
Thus, “when the sum of the impulses of the external forces acting on a system of particles is zero, the total momentum of the system remains constant.” Again, considering mass center ( )yxG , of the system, we have,
( ) ( )( ) ( )∑∑
∑∑=
=
myym
mxxm - (v)
Differentiating equ(v) with respect to time, we get:
( ) ( )( ) ( )∑∑
∑∑=
=
yy
xx
mvvm
mvvm ( ) ( ) )(vivmvm −=⇒ ∑∑
We have [from 6.3]
2211 & vvvvvv ==⇒= Now from equ(iv) we get:
( )viivv −= 21 Thus, “When the sum of impulses of the external forces acting on a system of particles is zero, then
mass center of the system moves with a constant velocity .v 6.4 Kinetic Energy of a system of particles: Considering a system of particles, the total K.E. relative to xyz axes of system of n particles can be obtained as
( )∑=
−=n
iii ivmKE
1
2
21
Again, ( )iirr cici −+= ρ
Differentiating equ(ii) with respect to time, we get,
( )iiivv cici −+= ρ
From (i) & (iii)
( ) ( )( )ciccic
n
iicici
n
i
vvmvmKE ρρρ &&& ++=+= ∑∑==
.21
21
1
2
1
( )( )[ ]∑ ∑ ∑= = =
++=++++=∴n
i
n
i
n
iciicicici bbaababamvmvmKE
1 1 1
2222 .2.21.
21
Q&& ρρ
But,

Downloaded from www.jayaram.com.np/ -57
Y
x
mvy
mv
mvy
y
o x
Y
x
Y
x
A
B
mAvA
mBvB
mCvCC
+(Fext)dt
t1
t1
t1
t1
(Mo)ext.dt
∑∑=
==n
iciii mandMm
10ρ&
So, we get,
∑=
+=n
iciic mMvKE
1
22
21
21 ρ&
Hence, KE of the system of particles = KE of the total mass moving with the mass center velocity + sum of the KE of individual particles having velocity relative to the center of mass. 6.5 Work-Energy Principle: Conservation of energy for a system of particles:
Work of the force F exerted on the particle during the displacement = change in KE i.e. )(1221 ittu −−=− For the entire system, )(1221 iiTTU −−=− Similarly work of the conservative force is independent of path followed and is equal to minus of the change in potential energy. i.e. ( ) ( )iiivvu −−−=− 1221 For the entire system, ( ) ( )ivVVVVU −−=−−=− 211221 From (i) & (iv), we get 1221 TTVV −=−
( )vVTVT −+=+∴ 2211 Thus for the particle moving under the conservative force, “the sum of KE and PE remains constant.” KE + PE = Total Energy (E) = constant ∴ E1 = E2 Hence, Energy is conserved. 6.7 Principle of Impulse and Momentum for a system of particles: The angular momentum of particle about origin ‘O’ = moment of the first momentum of particle about the origin.
)(+−= ×× yxxyo mvmvhQ
Then for the total system of particle
( )∑ −= xyo yvxvmH
Differentiating with respect to time, we get,
( ) ( )[ ]iiiequinovedMH nextoo 22.6Pr∑=&
where, extoM is the moment of external force acting on the system.
This external force can be categorized into two types: (a) Forces exerting at origin These provide linear impulse

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -58
i.e. ( ) ( ) ( )∑ ∑ ∑∫ ==12
2
1
vmvmdtFt
t ext
(b) Forces which are away from the origin These provide angular impulse.
i.e. ( ) ( )∑ ∫∫ = 2
1
2
1
t
t exto
t
t ext dtMdtF
[Note: - External Impulse changes the linear momentum of system External Moment changes the angular momentum of system. Now, from linear impulse momentum principle, we have
( ) ( ) ( ) ( )∑ ∑∑ −=+ − ivmIvm ext 2211
Again, from angular momentum principle
( ) ( ) ( ) ( )∑∫ −=+ iiHdtMH o
t
t extoo 212
1
Comparing these two equn it shows that sum of momenta (linear momentum or angular momentum) of particles at time t1 and the impulse of the external forces are equipollent (Not actually equivalent for particles but equivalent for rigid body). When there is no external forces, (System momenta)1 = (System momenta)2 Types of system of particles: (a) Constant System of Particles: The system which neither gain nor lose particles during their motion are called the constant system of particles. e.g. Rigid bodies (b) Variable System of Particles: The system which are continuously gaining or losing particles or doing both at the same time are called variable system of particles. e.g. Hydraulic turbines, Rockets, etc. 6.8 Steady Stream of Particles with variable mass In steady stream of particles the flow of particles at any point remains constant. [All the above equn derived so far are for steady streams]. ` Let us consider a steady stream of particle(s) such as stream of water diverted by a fixed vane or a flow of air through blower.
B B B
AAA
S S
( m)VA
( m)VB
mivimivi
F t

Downloaded from www.jayaram.com.np/ -59
In this system it continuously gains particles flowing in and looses an equal no. of particles flowing out, so this type of variable system of particles is reduced to auxiliary constant system of particles, which remains constant for a short time t∆ If m∆ amount of mass enters the system ‘s’, at time t∆ . Then,
The momentum of the particles entering the system = ( ) Avm∆
The momentum of the particles leaving the system = ( ) Bvm∆
And, the impulses of the forces exerted on s = ∑ dtF. and ∑ iivm (momentum for each particles)
cancels from both sides. Hence, we may conclude that,
The system formed by the momentum ( ) Avm∆ of the particles entering the system ‘s in the time t∆ and impulses of the forces exerted on ‘s’ during that time is equipollent to momentum of
( ) Bvm∆ of the particles leaving ‘s’ in the same time t∆ .
i.e. ( ) ( ) ( )ivmtFvm BA −∆=∆+∆ ∑
Dividing both sides by t∆ and taking limit, we get
( )
( ) ( )iivvdtdmF
vvtmF
AB
ARt
−−=∴
−∆∆
=
∑
∑ →∆ 0lim
This equation gives the resultant of the forces exerted by the vane on the stream. This principle is applicable to the following mass as:
(a) Fluid diverted by a vane/ hydro-turbines/ properties (b) Fluid flowing through a pipe (c) Jet engine (d) Fan
6.9 System with variable mass: A system which gains mass by continuously absorbing particles or looses mass by continuously expelling particles is the system with variable mass. Consider at time t, the system ‘s’ absorbs the particles of mass m∆ during the time interval .t∆
V
mS
m( m)Va S m+ m
Here, velocity at time t = v
velocity at time ( ) vvtt ∆+=∆+
Absolute velocity of the absorbing mass = av
From the principle of impulse and momentum,
m ( ) ( )( )vvmmtFvmv a ∆+∆+=∆+∆+ ∑
( ) ( ) ( )ivmvvmvmtFor a −∆∆+−∆+∆=∆∑,
Relative velocity with respect to s of the particle

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -60
( ) vvcevvu oa <−= sin,
( ) ( )[ ]smallveryverybeingtodueumneglectingumvmtF ∆∆∆−∆=∆∴∑
( )iiamudtdmF
dtvdmu
dtdmFor
udtvdmFor
utm
tvmFor
tt
−⎥⎦⎤
⎢⎣⎡ =+∴
=+
−=
∆∆
−∆∆
=
∑
∑
∑ →∆→∆
,
dtdm,
limlim,00
In the above equn udtdm is the thrust which tends to slow down the motion of ‘s’. This is in case of
gaining mass. If system ‘s’ looses mass (as propulsion of rocket) the thrust generated would increase the motion of ‘s’. Tutorials: (1) Two particles shown in fig oscillate on the smooth plane in the r-direction. (a) Write the differential equation of motion for each mass. (b) Find equation of motion for the center of mass (c) Write the expression for KE & PE of the system of particles.
K2K1
X1 X2
F2F2
R2
F2F2
m1g
K1X1
R1
m2g
K2 (X2-X1)
(a) Differential equation of motion for mass m1:
( ) 1112211
11
xmxxkxkxmFx
&&
&&
=−+−⇒
=∑
Differential equation of motion for mass m2:
( ) 221222
22
xmxxkFxmFx
&&
&&
=−−⇒
=∑
(b) Equation of motion for the center of mass Here the resultant internal forces due to K2
cancles out so effect is due to external forces only. If xc is the c.m. of the entire system then
( ) [ ]..mcofonacceleratixxmF ccx ==∑ ∑ &&&&
( ) ,21112 cxmmxkF &&+=−⇒
Taking m1+m2 = M = Total mass

Downloaded from www.jayaram.com.np/ -61
50m/s
60
A
B
mVB
sA
B
F t
Fy t
Fx t
mivi ( m)vA
B
s
mivi
cxMxkF &&=− 112
(c) K.E./P.E. of the system of particles:
KE (T) = 222
211 2
121 xmxm && +
[ ]datumatbeingVVOVVVPE geeg ,0)( =+=+=
( )
( ) ( )2122
211
2122
211
21
21
21
21
xxkxkV
xxkxk
−+=∴
−+=∴
(2) A nozzle discharges a stream of water of cross-sectional area A=100 mm2 with a speed of v=50m/s, and the stream is deflected by a fixed vane as shown in the figure. The density of water is
103 kg/m3. Determine the resultant force F exerted on the stream by the fixed vane. Solution: We’ve from the principle of Impulse-Momentum for particles Here, VA = VB = 50 m/s Area, A = 100 mm2
mass flow-rate = skgAVdtdm /5== ρ
Now, Cancelling iivm∑ from both sides, we have
Solving for x-axis,
( ) ( )
( )
125
60cos1
60cos
=∴
°−=⇒
°∆=∆+∆−
x
x
BxA
FdtdmF
vmtFvm
Again, solving for y-axis
( )
5.21660sin
60sin
=°=⇒
°∆=∆
vdtdmF
vmtF
y
By
°==∴
+=+=∴
60250
ˆ5.216ˆ125ˆˆ
θNFjijFiFF yx
(3) A system consists of three particles A, B and C as shown in the figure and have velocity,
( ) ( ) ( ) smkjiVandsmkVjViVsmkiV czyBA /ˆ2ˆ3ˆ6/ˆˆˆ4,/ˆ8ˆ5 −+=++=−= respectively. If the masses
of these particles are mA = 3 kg, mB = 1 kg and mc = 2 kg respectively and the resultant angular
momentum oµ of the system about origin ‘O’ is parallel to the z-axis, determine the value of oµ .

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -62
Y
Z
X
B
A
C4m
3m
5m
VA
VC
VB
Solution: We have, Resultant angular momentum
( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( )kVjViV
kjikikVjVikikikj
vmrvmrvmr
vmr
yzy
zy
cccBBBAAA
iiio
ˆ574ˆ4111ˆ845
ˆ2ˆ3ˆ62ˆ3ˆ4ˆˆˆ41ˆ5ˆ4ˆ8ˆ53ˆ5ˆ3
−+−++−=
−+×++++×++−×+=
×+×+×=
×= ∑µ
Since, oµ is parallel to the z-axis,
0&0 == yx µµ
( ) ( )
( ) ( )iiiViiV
z
y
−=−
−=+−∴
041110845
Solving these two equations, we get: 75.27&8.16 =−= zy VV
Then, ( ) kkVyoˆ2.124ˆ574 −=−=µ
axiszvedirectioninskgmo −−=∴ /2.124 2µ

Downloaded from www.jayaram.com.np/ -63
Chapter – 7 Kinematics of Rigid Bodies
7.1 Introduction: Particle:
• It is a material body which is so small that its dimension can be treated as negligible in comparison to other dimensions involved.
Rigid bodies: • It is combination of two or more particles, which are connected in such a way that they do not
change their relative positions due to application of external forces. • The various points or particles in rigid bodies may have different motions but their motion are
so related such that their relative position remains unchanged. • In reality all the rigid bodies deform in application of external forces but in negligible amount.
7.2 Translation: A motion is said to be translation if any straight line drawn on the body obeys the same direction. If all the particles move parallely along straight line, it is said to be rectilinear translation and if the path are curved, the motion is said to be curvilinear translation.
A A’ A’A
B B’B’B If BA randr ∆∆ be the displacement vectors of the particle A & B during t∆ , then for translation
( )ivvtr
tr
BABA −=⇒
∆∆
=∆
∆
Similarly,
( )iiaat
vt
vBA
BA −=⇒∆
∆=
∆∆
Thus, for any body in translation, all the points have the same velocity and acceleration at any given instant. For curvilinear translation, there is change in direction and magnitude of velocity and acceleration at every instant. For rectilinear translation velocity and acceleration follow same direction during entire motion. 7.2 Rotation: A motion is said to be rotation when the particles in the rigid bodies (slab) moves in concentric circles, with common fixed center ‘O’. If the particle in the slab moves ‘dθ’ at time dt, then the angular velocity is given by:

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -64
B1
A1
oB1
A1A1
A1
B1 B1
o
d
( )idtd
−=θω
And, the angular acceleration is given by:
( )iidtd
dtd
−== 2
2θωα
From (i) ωθd
=dt
( )iiidd
dd
dd
−=∴
==∴
θωωα
θωω
ωθωα
Anti-clockwise direction is taken +ve and clockwise direction is taken –ve. (1) For Uniform Rotation:
ωα ,0= is constant, and ......0 tωθθ +=
(2) For Uniformly Acceleration Rotation:
tcons tan=α
)(22
22
2
oo
oo
o
tt
t
θθαωω
αωθθ
αωω
−+=
++=
+=
From the equation of linear motion
Linear and Angular Velocity, Linear and Angular Acceleration
ωθω rvdtd
dtdsv === ;;
Tangential component of acceleration, αω rdtdr
dtdvat ===
And Normal component of acceleration, ( ) 22
ωω rr
rar ==
7.3 General Plane Motion: Any plane motion which is sum of a translational and rotational motion is called plane motion. A part of motion is translation and another part is rotational.
A A’
B B’ B1 B2 B1
B2A2 A2A1
BB’
A A’
d

Downloaded from www.jayaram.com.np/ -65
B1
B2 B1 B’2
A1 A2
B’2B2
A2
A1 A2 7.4 Absolute and Relative velocity in plane motion Absolute motion means motion with respect to fixed axes and relative motion means motion of one with respect to other axes in motion. For any plane motion of rigid body, when replaced by sum of translation and rotation about A, then absolute velocity of particle B is given by:
( )iVVV ABAB −+=
where, VA = absolute velocity of A is translation of slab with A VB/A = relative velocity ‘B’ with respect to ‘A’ i.e. rotation of slab measured with respect to ‘A’
A
B
A A
B B
VB
VB
VB/A
VAVA
r
x’
VA +
VB/A
VB VB =
VA
VB/A
Plane motion translation with A Rotation of B about A
The plane motion of Rod can be explained as: (a) choosing A as reference \A Translation with ‘A’ & rotation about ‘A’
i.e. ABAB VVV +=
From figure ‘d’ θθ cos/&tan AABAB VVVV ==
[ ]
( ) [ ]point reference as B'' choosingby obtained becan result samecos
iil
V
rlvl
V
A
AB
−=∴
==
θω
ωω
Hence, Angular velocity of Rigid body in plane motion is independent of the reference point. 7.5 Instantaneous Center of Rotation For any general plane motion, there exist a center with reference to which the velocities of all the particles in the rigid body are same at any instant of time. This center is called as instantaneous center of rotation and the axis is called instantaneous axis of rotation.

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -66
A
B VB
CW
WA
UA
W
AA
UA
plane motion Rotation translation If ⇒= 0AV ’A’ will be the instantaneous center of rotation If ⇒= 0ω No instantaneous center of rotation
But, If ,0&0 ≠≠ ωAV Then
If the slab is rotated with angular velocity ''ω about a point ‘c’ located on the perpendicular to AV at
distance ωAVr = from ‘A’ then all the particles will appear to rotate about ‘c’ with same velocity '.'ω
VA VA
W
A
plane motion in stantarems of rotation Methods to locate instantaneous center of rotation (a) If direction of velocity of particles ‘A’ & ‘B’ are known but are not parallel, then ‘c’ is the
intersection of perpendicular drawn on BA VV &
A
CB
W
VBV A
VBC
VA
AB
(b) If magnitude and direction of velocity of particles ‘A’ & ‘B’
are known and are perpendicular to line AB, then ‘c’ is located as
(c) If magnitude ,BA VV = then ‘c’ would be at infinite and the body would translate. Note:
• Instantaneous center of rotation may be located either on the slab or outside. • If ‘c’ is located on the slab then CBBc VVandV == .
• The point ‘c’ is different at different time interval t∆ • Acceleration of various particle on the slab cannot be determined by this method. Hence, it is
used to compute only the velocity of particles at any instant of time. 7.7 Absolute and Relative Frame: Coriolis Acceleration in plane motion

Downloaded from www.jayaram.com.np/ -67
Aac
WrBel.Velocity
bs. velocity
u
X
Y
Y’
X’
os
r
p’p
o
1
X
Definition: A particle with in a system of rigid body may have motion with respect to a moving frame inside the body. In such case an additional comp. of acceleration of the particle with respect to the moving frame comes into the existence, this complementary acceleration in case of moving frame is called coriolis acceleration, '' ca which is perpendicular to the direction of relative velocity of particle
with respect to frame.
x
w
B
O
uY
Y’ x’Y
x
r
A
u B
Absolute frame Relatix frame Stationary frame or moving frame Axis x’ay rotates With avg. velocity w Calculation: Consider the motion of particle P, which moves along a path on a slab ‘s’. The slab rotates along a fixed point O. Motion of P is given by r & θ with respect to fixed axis (XOY axis) and by r & θ, with respect to axis attached to slab ‘s’ and rotating with it. It is required to determine the absolute motion of ‘P’ and relative motion of ‘P’ with respect to ‘S’. We know from radial and transverse component of velocity ( ) ( ) ( ) ( ) [ ]11& θθθθθθ
θ+=−+=== ooprp irrVrV &&&&
Here, p is position with respect to x-y axis p' is position with respect to x'y' axis. Case I: When P is fixed on slab ‘s’ and the slab allowed to rotate with respect to XOY, then P coincides with P' tconstconsrVV pp tantan, 1
' ===∴ θ
0&0 1 ==∴ θ&&r So from equation (i) ( ) ( ) ( )iirVV oprp −== θ
θ&'' &0
Case-II: When slab is fixed and P is allowed to move, then 0tan =∴== oospp tconsVV θθ &
Then from equation (i) ( ) ( ) ( )iiirVrV sprsp −== 1& θ
θ&&

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -68
Y
x’
xo
A
B
rA
rB/A
Now, the total velocity is given by: from the vector components, we have: ( )ivVVV sppp −+= '
The Radial and Transverse components of velocity ( ) ( ) ( ) ( ) ( ) ( )
θθθ spppsprprp VVVrVVV /'/' & +=+= [also for acceleration]
Again for acceleration, we have:
( ) ( ) ( ) ( )vrrrrrra ooorp −++−=+−=−= 211
221
2 2 θθθθθθθ &&&&&&&&&&&&
( ) ( ) ( ) ( )virrrra oop −+++=+= 11 22 θθθθθθθ
&&&&&&&&&&&
Calculating the acceleration of point ‘p’ when the slab is rotates as ‘P’ also moves with respect to slab it is observed that, instead of being
get we,/' sppp aaa +=
,/' csppp aaaa ++=
where ca has the vector component as
( ) ( ) ( )viiVra sporc −−== ωθ 22 &&&
and, ( ) ( ) ( )viiiVarspc −= /2ωθ
( )( ) slab ofrotation thealong
slab ofrotation the to90
→
°→
θc
rc
a
a
The coriolis acceleration ca is thus a vector perpendicular to the relative velocity spV / and of
magnitude to spVz /.ω and direction of ca is perpendicular to the vector spV / .
7.10 General Motion: Considering two particles A & B of the rigid body, then, we have
( )iVVV ABAB −+= /
If the body rotates with angular velocity ''ω about the point ‘A’, then
( ) [ ]ABABABB rViirV ×=−×= ωω //
Further, we have
( ) ( )iiirraaor
aaa
ABABAB
ABAB
−××+×+=
+=
//
/
, ωωα
[ ] ( ) ( )
( )ABABAB
ABAB
ABAB
ABABAB
rrra
rr
rdtdr
dtd
rdtdV
dtda
///
//
//
///
×××+×=∴
×+×=
×+×=
×==
ωωω
ωα
ωω
ωQ

Downloaded from www.jayaram.com.np/ -69
3m5
4mo
A
BX
Y
VB=0.1m/s
where α is the angular acceleration of the body at instant considered. The equ (ii) and (iii) show that the most general motion of a rigid body is equivalent to the sum of a translation (in which all particles of the body have the same velocity and acceleration) and of a motion in which particle ‘A’ is assumed to be fixed. i.e. The motion of any particle ‘B’ with respect to ‘A’ would be characterized by the same vectors
αω & . Thus αω & are independent of the choice of reference point but the moving frame should remain parallel to the fixed frame of reference. Tutorials: 1. The end ‘B’ of the rod AB as shown in the figure moves with constant velocity, VB = 0.9 m/s ( → ) Determine:
(a) Angular velocity and angular acceleration of the rod
(b) Velocity and acceleration of end ‘A’ Solution: Here,
( )43tan
4&31−=∴
==
θ
mXmY BA
Again, 0/9.0 ==⇒== BBBB xasmXV &&& (a) Now from ,AOB∆
[ ]( )
sec/3.0
3.09.0sin5
direction clockwisefor ve takingcos5
rad
X
X
B
B
==∴
−=⇒=−=
+=
θω
θθθ
θ
&
&&&Q
Again, ( ) ( )[ ] ( ) 0.533.0
545sincos5 22 =⎥⎦
⎤⎢⎣⎡ ×+×−=+−== θθθθθ &&&&&&&xaB
12.0−=∴θ&&
sec/12.0 rad==∴ θα && (b) We have ( ) ( ) ( )[ ]2sincos5&cos5sin5 θθθθθθθ &&&&&&& −===⇒= AAAA YaYY
( ) ( )
2
2
/75.0&/2.1
/2.113.0545,
75.012.0543.0
535,
smasmV
smYVor
aor
AA
AA
A
==∴
−=−××==
−=⎥⎦
⎤⎢⎣
⎡−×⎟
⎠⎞
⎜⎝⎛+−×⎟
⎠⎞
⎜⎝⎛−=
(2) In the engine system shown, the crank AB has a constant clockwise angular velocity of 2000rpm. For the crank position indicated, determine: (a) the angular velocity of the connecting rod BD (b) the velocity of position P. Solution: Here, the crank AB rotates about point A,

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -70
A DP400
R
VA = 12mm/s
R2 =100mm
D
C
B
( ) smABV
radradNrpm
ABB
AB
/68.15754.209
sec/4.20960
20002sec/60
22000
=×=×=
=××
===
ω
ππω
Using sine law,
°=⇒=°
⇒=° 94.13
8sin
340sinsin90sin BB
ABB
BD
Now, for the motion of connection rod BD, which is a plane motion: the velocity VD is horizontal and VB is as obtained above. Resolving motion of BD into a translation with B and rotation about B, we get:
VB
VD
B
D
B
5050
B WBD
VB
VB
D
VD/B
Plane motion = Translation + Rotation
Now, we have
50
VB
VD/B
BDBD VVV /+= Again, using sine law,
( )iVVV BBDD −=°
=°
=° 1.76sin
68.151.76sin50sin9.53sin
/
Solving the equation separately, we have,
smVV
smV
pD
BD
/05.13/37.12/
===
Again,
srad
sradBD
VBDV
BD
BDBDBDBD
/9.61
/9.612.037.12/
/
=∴
===⇒×=
ω
ωω
(3) A double gear rolls on the stationary lower rack. The velocity of its center ‘A’ is 1.2 m/s directed to the right. Determine: (a) the angular velocity of the gear (b) the velocities of the upper rack ‘R’ and of point ‘D’ of gear. Solution: (a) Angular velocity of the gear: Distance moved by the center of gear for each revolution 12 rπ=

Downloaded from www.jayaram.com.np/ -71
Then, [ ]
)(
2222
1
11
irx
rxr
x
A
AA
−=∴
=⇒==
θ
πθππθ
π
Differentiating,
sec/8
15.02.1,1
rador
rVx AA
=∴=
==
ωω
ω&
Analyzing the plane motion:
A
B
C
DVA
VA
VA
VD/A
VC/A
VB/A
AA VA
VB
VC
VD
VA
VD/A
Now, velocity of upper rack
smV
smrVVVV
B
ABABR
/2
/281.02.12.1 2/
=∴
=×+=+=+== ω
Velocity of point D, 815.02.12.1 1/ ×+=+=+=∴ ωrVVV ADAD
°=∴
=
=∴
−
452.12.1tan
/69.1
1
φ
φ
smVD

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -72
Chapter – 8 Plane Motion of Rigid Bodies Forces, Moments & Acceleration
8.1 Considering a rigid body acted upon by several external forces, .,,, 321 etcFFF Let, the rigid
body be made of a large number of particles of mass ( )nimig .....2,1==∆ and G be the mass center of
the rigid body whose motion can be considered with respect to xyz axis. Then, from Newton’s 2nd law:
∑ = amF - (i)
where, m = Total mass of the body
a = Acceleration of the CG ‘G’
∑ F = Sum of applied force on the body
Again from Angular-Momentum Theorem,
( )iiHM GG −=∑ &
where, =∑ GM Sum of the moment of forces about ‘G’
=GH& Rate of change of angular momentum about G.
The equations of motion (i) and (ii) express that the system of external forces is equivalent to the
system consisting of vector m a attached at G and couple of moment GH& .
8.2 Angular Momentum of Rigid body in plane motion: Considering a rigid slab consisting of a large number of particles P1 of mass im∆ be in plane
motion. The angular momentum GH of the slab about its mass center G may be computed as:
( )ivmrHn
iiiiG −⎟⎠⎞⎜
⎝⎛ ∆×= ∑
=1
''
where, 'ir and '
iivm∆ be the position vector and linear momentum of Pi about the ‘G’ with respect to
x'y' frame. Again,
( )
i
n
ii
ii
n
iiG
ii
mr
mrrH
rv
∆=
∆××=∴
×=
∑
∑
=
=
1
2'
1
'
''
ω
ω
ω
( ) ⎥⎦
⎤⎢⎣
⎡=∆−= ∑
=
slab alr toperpendicuG about motion ;1
2' ImriiIH i
n
iiG ω
Differentiating equ(ii) with respect to time, we get:

Downloaded from www.jayaram.com.np/ -73
( )
α
αω
IH
iiiIIH
G
G
=∴
−==
&
&&
Thus the rate of change of the angular momentum of the slab is equal to αI and in perpendicular to the direction of the slab. 8.3 Plane motion of a Rigid body : D’Alembat’s Principle: Statement:
“For a rigid body of mass ‘m’ moving under the action of several forces etcFFF ,,, 321 , the
external forces acting on the rigid body are equivalent to the effective forces of the various particles forming the body.” Considering mass center ‘G’ of the slab as reference point, we have:
( ) ( )( ) ( ) yeffy
xeffx
amF
amF
∑∑∑∑
∆=
∆= (i)
Again, we have: ( ) ( )( ) ( ) yy
xx
amam
amam
∑∑∑∑
∆=∆
∆=∆ (ii)
where, yx aanda are components of a at ‘G’.
∑ ==∆ M slab theof mass Total m
Then from equations (i) and (ii), we have: ( )( ) yeffy
xeffx
aMF
aMF
=
=
∑∑
) (iii)
The total acceleration a of any given particle ‘P’ of the slab is equal to
Total acceleration ( )a = Linear acceleration of ‘G’ ( )+a Angular acceleration of P w.r.t. x'y' 'a
( )iveaeaaa
aaa
ttnn −++=∴
+=∴
ˆˆ
'''
Thus, effective force is also resolved into two parts:
ttnneffeameamamamF ˆˆ ∑∑ ∑∑∑ ∆+∆+∆=∆=
i.e. effective force = force due to translation about G + Force due to rotation about G Considering the case of Translation: During translation, all the particles in the body moves along ‘G’ such that total moment of force
about the ‘G’ is zero [because ]0=∆∆ xt maandma
∴ For Translation,
( )
( )vamF
Hor
M
eff
eff
effG
−=∴
=
=
∑∑
0,
0&
Considering the case of rotation:

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -74
For rotation ''tx maandma ∆∆ are associated with the slab, Now
Moment of 'xma∆ about G = 0 and [ ]G along is '
xa
Moment of 'tma∆ about G = ( ) '' tamr ∆
Again, we have ,'' αrat =
Now considering all the particles of slab under rotation ( ) ααα ImrrmrM effG =∆=∆= ∑∑∑ 2''')(
For rotation motion,
( ) αµ IM effGG == ∑∑ &
For plane motion: For General Plane Motion, the system of effective forces can be replaced by an equivalent force
coupe system consisting of m a force at ‘G’ and couple of αI in the directon of α along ‘G’ Then The D’Alembert’s Principle becomes, “ The external forces acting on the body are equivalent to a force-couple system consisting of a
vector m a attached to the mass center ‘G’ of the body and a couple .αI ” Then equation of motion becomes,
αIM
aMF
aMF
G
yy
xx
=
=
=
∑∑∑
(x)
Note:
For translation, effective force reduces to m a . For rotation, effective force reduces to αI and for the plane motion effective force is the sum of the both. 8.3 Application of Rigid body motion in plane:
For a rigid body in plane motion, there exists a fundamental relation between the forces ( )F
acting on the body, the acceleration of its mass center ( )a and the angular acceleration ( )α of the body.
αIamamF yx ++=
This relation may be used to determine the acceleration ( )a and angular acceleration ( )α produced by a given system of forces acting on a rigid body, or to determine the forces which produce a given motion of the rigid body. The equation may be separated as:
αIMamFamF cyyxx === ∑;;
The equation is solved to get the unknown quantity of motion. It gives the better understanding of problem, easy to draw free body diagrams, develop and solve equations for the 3-D and 2-D motions.

Downloaded from www.jayaram.com.np/ -75
8.5 Constrained Motion in the Plane: The plane motion, where each bodies move with definite relation with the other bodies is called constraint motion. For example: rotation of crank is related with translation of piston and oscillation of connecting rod in an engine.
In such cases, the definite relationship exists between mass center, acceleration a and angular
acceleration α between the several bodies, under constrained motion. Solution for such motion is obtained in two steps:
(i) Kinetic Analysis ( )MIa ,,,α of the problem (ii) Use of D’Alembert’s Principle or Dynamic Equilibrium Method to solve the unknown
quantity. When a mechanism consists of several moving parts, each moving part is considered separately and the problem is solved. Two particular cases of constrained motion are: (i) Non-centroidal rotation:
• Rigid body is constrained to rotate about a fixed axis which does not pass through main center.
• The mass center ‘G’ of the body moves along a circle of radius r centered at the point ‘O’. If 0... == αω eiconst
xt aathenra ===∴ ,0α i.e. normal component only and the force generated thus is called
centrifugal force. Rolling Motion: If the disk is constrained to roll without sliding the acceleration of its mass center ‘G’ and its angular acceleration ‘α’ are dependent. Here,
( )
( )iirax
irx
−==
−=
α
θ
&&
get wee, w.r.t timatingDifferenti
If the mass center ‘G’ does not coincide with its geometric center ‘O’ , the relation (ii) does not hold true. Then, the relation becomes ( ) center geometric theofon accelerati, =−= oo awhereiiira α
Then,
( ) ( )GOGtOGoOGoG aaaaaaa /// ++=+==
where, ( ) ( ) ( ) ( ) 2
//, ωαα OGaandOGara nOGtOGo ===

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -76
Tutorials: 1. A cord is wrapped around a homogenous disk of radius r = 0.5 m and mass = 15 kg. If the cord is pulled upwards with a force T of magnitude 180N, determine (a) Acceleration of center of disc (b) Acceleration of the cord Solution: From (b) and (c), system of external forces = system of effective forces
( )( ) yeffyy
xxeffxx
amTFF
aamFF
=−⇒=
=⇒=⇒=
∑ ∑∑∑
ω
00
2
2
2
19.2
19.2
19.215
81.915180
−
−
−
==
=∴
=×−
=
−=
msaa
msa
msa
mTa
G
y
y
y
Q
ω
Again, Moment of external forces = Moment of effective turns i.e. ( )
effGG MM ∑∑ =
αα ⎟⎠⎞
⎜⎝⎛==− 2
21 mrITr
2
2
/48
/0.485.015
18022
srad
sradmr
T
=∴
−=××−
=−
=∴
α
α
Acceleration of Cord
( ) ( )
2
/
2.26
5.04819.2.
−=∴
×+=+=
+==
msa
AGa
aaaa
cord
G
tGAGtAcord
α
Tutorials 2 contd .....
Resolving a into two components:
α
α520.060sin
339.160cos−=°=
=°=aaaa
y
x
Now, equating system of external forces to a system of equivalent forces, we get Now,

Downloaded from www.jayaram.com.np/ -77
( )
( )( ) αααα
αα
1352.0255.33339.125
24581.9253
32.11225
21 222
−=−==×==×==
=∴
===
y
x
amam
NmgwI
kgmmlI
Now, we have:
( )( )( ) ( )srador
or
IamamwMM yxeffEE
/33.2,352.013339.15.3352.0245,
52.0339.152.0
=+×+=×
+×+×=×⇒= ∑∑
αααα
α
Again,
( ) ( )
NRamRor
FF
B
xB
effxx
5.11033.25.335.3345sin,
=∴×===°
= ∑∑α
( )( )
( )↑=∴
×−=−°+
= ∑∑
NRRRor
FF
A
BA
effyy
6.13633.21324545cos,

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -78
Chapter –9 Plane Motion of Rigid Bodies Energy and Momentum Method
9.1 Principle of Work and Energy for a Rigid Body For a rigid body of mass ‘m’, ‘P’ be a particle of the body with mass ‘ m∆ ’ moving with velocity ‘v’. Then, KE of the particle = ½ ( m∆ )v2 If the particle moves from position P1 to P2, then from the principle of work and energy, the work done is calculated as:
2211
1221 KEin ChangeTUT
TTU∆=∆+∆∴
∆−∆==∆
−
−
where, 22
11
Pat KEPat KE
−∆−∆
TT
Considering all the particles in a system, we have: 2211 TUT =+ − 9.2 Work of Force acting on the Rigid Body
The work of force F during the displacement from its position 21 stos is:
( ) ( )idsFUs
s−= ∫−
2
1
cos21 θ
where, F is magnitude of force F and θ is the angle between the force and the direction of motion. If F and F' are two forces turning a couple, then moment of couple is:
rFM .= Under the application of external forces (F & F'), the displacement of points A & B to A'B", the motion may be divided into two parts:
(a) Point A & B undergo equal displacement dr1 to point A' & B'. (b) Point A' remains fixed and B' moves to B" with the displacement dr2 equal to rdθ.
During the first part of motion, work due to force F = Work due to F' and cancels out due to opposite in sign. During the second part of motion, work done is given by:
[ ]θθθ
rdMMdduFrddrFdu
==∴==
Q2.
∴ Total work done is ∫=−2
121
θ
θθMdU
9.3 Kinetic Energy for a system: (A) Kinetic Energy in Translation: For a rigid body in translation, all the particles have the same velocity as of CG. i.e. vv =

Downloaded from www.jayaram.com.np/ -79
∴ KE of the entire body in Translation is given as:
( ) ( ) 2
1
2
1 21
21 vmvmT
n
ii
n
ii ⎟
⎠
⎞⎜⎝
⎛∆=∆= ∑∑
==
2
21 vMT =∴
(B) Kinetic Energy in Rotation: Considering a rigid body rotating about fixed axis and point ‘O’, then
( ) ( )( ) ∑∑∑ ∆=∆=∆= 2 mrrmvmKE 222
21
21
21 ωω
[ ]o22 I rotation of axis about thebody theof M.O.I.
21
==∆=∴ ∑ mrIKE o Qω
This formula is valid for any axis of rotation. (C) Kinetic Energy in Plane Motion: For a body in plane motion, at any given instant, the velocities of all the particles of the body are same as if the body were rotating about the instantaneous axis of rotation, and about the instantaneous center of rotation. Then the kinetic energy is
( )iIT c −= 2
21 ω
where,
.consideredinstant at thelocity Angular ve
axis ousinstantane about thebody theof M.O.I. ==
ωcI
Now, from Parallel axis Theorem 2rmIIC +=
where,
G''center mass toC'' from Distance r
plane reference thelar toperpendicu axis centroidal aabout body theof M.O.I.==I
Then,
( ) ( )
[ ]GofvelocityvriiIvmTor
IrmIrmT
==−+=
+=+=
ωω
ωωω
Q)(21
21,
21
21
21
22
2222
So, the total KE of rigid body in plane motion is the sum of KE of body due to Translation about CG
⎟⎠⎞
⎜⎝⎛ 2
21 vm and KE of body due Rotation about CG ⎟
⎠⎞
⎜⎝⎛ 2
21 ωI .
9.4 Conservative and Non-Conservative System: A system is said to be conservative if the work done by the system is independent of the path followed but depends upon the initial and final position of it. Examples are KE, PE, gravity, etc. In the non-conservative system, work done depends upon the path followed by the system. Examples are friction, elastic, etc.

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -80
The principle of conservation of energy is valid for the conservative force only. When a rigid body or a system of rigid bodies move under the action of conservative forces, then the principle of work and energy may be expressed as: 2211 VTVT +=+ i.e. The sum of the KE and PE of the system remains constant. 9.5 Work-Energy Applications: Considering a rod AB of length ‘L’ and mass ‘m’ whose extremities are connected to blocks of negligible mass sliding along horizontal and vertical tracks as shown in figure. If the initial velocity of the rod is zero and datum as shown is considered, then Q Initial KE (T1) = 0 Initial PE (V1) = 0
If the rod moves by an angle ‘θ’, the CG of the rod moves by 2
sinθL vertically downwards from its
initial position.
θθ sin21
2sin
21
2 mgLmgV =−=∴
Now, for the final position, the instantaneous center of rotation is located at ‘C’ and also we have
that ωLCG21
=
Then, ωωω LLV CG 21
21
2 ===r
( ) ⎥⎦⎤
⎢⎣⎡ =⎟
⎠⎞
⎜⎝⎛+=+=∴ rodformLImLLmIVmT 22222
22
22 121
121
21
21
21
21 ωωω
22
2 321 ω⎟⎟
⎠
⎞⎜⎜⎝
⎛=
mLT
Applying Principle of Conservation of Energy, we get:
2211 VTVT +=+
21
22
sin3
sin21
32100
⎟⎠⎞
⎜⎝⎛=∴
−⎟⎟⎠
⎞⎜⎜⎝
⎛=+
θω
θω
Lg
mgLmL
Note: D’Alembert’s Principle should be used to find the reactions at the sliders. 9.6 Impulse and Momentum for System of Rigid Bodies The principle of Impulse and Momentum can be applied to the system of rigid bodies as well. We know that, System Momentum-1 + System External Impulse 1 → 2 = System Momentum-2

Downloaded from www.jayaram.com.np/ -81
IF vmLor,
particles all of momentum of sum1
=
=∆= ∑=
n
iiivmL
And, ii
n
iiG vmrH ∆×= ∑
=1
' = sum of moment of momentum of all particles
or, ωIH G =
Then, Then, we have : The fig(iii) gives three equation of motion, as
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( )iiiIyFdtxxFdtI
iivmFdtvm
ivmFdtvm
zxy
yyy
xxx
−=⎟⎠⎞⎜
⎝⎛+⎟
⎠⎞⎜
⎝⎛+
−=+
−=+
∫∫
∫∫
ωω2
1
2
11
2
2
11
2
2
11
where, axisy and x from impulse of distanceslar perpendicu are& yx 9.7 Conservation of Angular and Linear Momentum: When no external forces acts on a rigid body, the impulses of the external forces are zero and the system of momentum at time t1 is equal to system of momentum at time t2. Thus, total linear momentum is conserved in any direction and angular momentum is conserved about any point. i.e. if 0=∑ extF
( ) ( )21
21 &
oo HHvmvm
==
In some cases as when the line of action of all external forces pass through ‘G’ or when sum of the angular impulses of the external forces about ‘G’ is zero, then 9.8 Impulsive Motion and Eccentric Impact: Remember : The definition of Impulsive Force and Impulsive motion . Eccentric impact Considering two bodies which collide under the eccentric impact. Let VA and VB be the velocities before impact of the points of contact A and B. Under the impact, the two bodies will deform and at the end of period of deformation, component of UA = Component of UB, along the line of impact. [During deformation both bodies move with same velocity.] At the end of period of restitution, ''
BA VandV be the velocities of A and B as shown, Assuming the bodies are frictionless. Then, component of restitution is given by:

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -82
( )⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
=−=
∫∫∫
∫
ndeformatioofperiodtheafterimpulseofmagnitude
deformatioofperiodtheduringimpulseofmagnitude
,
Rdt
nPdt
where
iPdt
Rdte
The relative velocities of two particles before and after impact along the line of impact is related as:
( ) ( ) ( ) ( )[ ] ( )
( ) ( )( ) ( ) collision beforeaction of line thealong velocity Relative
collisionafter action of line thealong velocity Relative,''
''
=−−
=
−−=−
nBnA
nAnB
nBnAnAnB
VVVV
eor
iiVVeVV
Applying Impulse-Momentum Equation for the particle ‘A’ Let uandv be the velocities of mass center at the beginning and at the end of the period of
deformation. 1ωω and be the angular velocities at the same instant. Then along the line of impact the component of momentum and impulse becomes:
And, ( )( ) 11 ωωωω IIPdtivIPdtrI
umvmPdtiiiumPdtvm nnnn
−=⇒−=−
−=⇒−=−
∫∫∫∫
where r is the perpendicular distance from ‘G’ to line of impact. Similarly, considering for the period of restitution:
∫ ( )')(' 11
''
IwIRdtviiIRdtrI
mvvmRdtvvmRdtvm xxxx
−=⇒−=−
−=⇒−=−
∫∫∫
ωωω
where, '' ωandv represent the velocity of mass center and angular velocity of body after impact. From (i), (iii) & (v), we get:
nn
nn
umvmmvum
e−−
='
( )viiuvvu
enn
nn −−−
='
Similarly, from equ(i), (iv) and (vi), we get:
( )viiie
IIII
e
−−−
=
−−
=
1
1
1
1
'
'
ωωωω
ωωωω
Again, Multiplying the numerator and denominator of equ(viii) and adding respectively to the numerator and denominator of (vii), we get:
( )( ) ( )
( ) ( )( ) ( ) ( )x
uvvu
e
ixrurvrvru
e
nAnA
nAnA
nn
nn
−−−
=
−+−++−+
=
'1
'1 '
ωωωω
Similarly for 2nd body,

Downloaded from www.jayaram.com.np/ -83
( ) ( )( ) ( ) ( )xi
vuuv
enBnB
nBnB −−−
='
Adding the numerator and denominator of (x) and (xi) respectively, we get:
( ) ( ) ( ) ( )( ) ( ) ( )
( ) ( )( ) ( ) ( )
collision beforeimpact of line thealongbody colliding of velocity Relativecollisionafter impact of line thealongbody colliding of velocity Relative
)(''
''
=∴
−−−
=
−+−−+−
=
e
xiivvvv
e
vuuvuvvu
e
nBnA
nAnB
nBnBnAnA
nBnBnAnA
Tutorials: 1. Gear A has a mass of 10 kg and a radius of gyration of 200mm, while gear B has a mass of 3 kg
and a radius of gyration of 80mm. The system is at rest when a couple M of magnitude 6 Nm is applied to gear B. Neglecting friction, determine: (a) The number of revolutions executed by gear B before its angular velocity reaches 600 r/min. (b) The tangential force which gear B exerts on gear A. Solution: (a) Considering the peripheral speed of gears be equal, we have
BB
A
BBA
BBAA
wwrr
ww
wrwr
4.0250100
===∴
=
We have, ⎥⎦⎤
⎢⎣⎡ ===
60/8.62min/600 dNwsradrwB
π
sradww BA /1.254.0 ==
( )
( ) 222
222
0192.008.03
4.02.010
kgmkmI
kgmkmAI
BBB
AA
=×==
=×==
Applying work-energy principle to the system, Since, system is initially at rest, 01 =∴T And,
( )( ) ( )( )
JT
wIwIT BBAA
9.163
8.620192.0211.254.0
21
21
21
2
22
222
=∴
+=
+=
Let θB be the angular displacement of gear B, Then, Work JMU BBB θθθ 6621 =×==− By the principle of work and energy:

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -84
⎥⎦⎤
⎢⎣⎡ ==
=∴=+
=+ −
πθ
θ
θθ
2Re35.4,
32.279.16360
2211
BB
B
B
vrevor
rad
TUT
(b) Considering the motion of gear ‘A’ KE of gear A at rest T1=0 When w=600 rpm
KE of gear A, ‘T2’ = ( )( ) JwI AA 1261.254.021
21 22 ==
Work: We have, Angular Arc covered by both gears is same i.e. [ ]θθθ rsrrs BBAA === Then, work done by gear A during the motion, ( ) ( ) ( )( ) ( )73.21.03.2721 FFrFrFU BBAA ====− θθ Principle of Work-Energy: Applying for Gear ‘A’ 2211 TUT =+ − JF 12673.20 =×+ NF 2.46= 2. A 2 kg sphere moving horizontally to the right with an initial velocity of 5 m/s strikes the lower end of an 8 kg rigid rod AB. The rod is suspended from a hinge at A and is initially at rest. Knowing that the co-efficient of restitution between the rod and sphere is 0.80, determine the angular velocity of the rod and the velocity of the sphere immediately after the impact. Solution: We have from Impulse-Momentum Theorem, (System Momentum)1 + (System External Impulse)1-2 = (System Momentum)2 Let, VR and '
RV be the initial and final velocity of Rod ‘CG’, 'ωω and be the angular velocities of
the rod and 'ss VandV be the velocities of sphere.
Now, Taking moment about A, ( )iIvmVmVm RRssss −+×+×=× '6.02.12.1 '' ω
Here,
( ) 222
'
96.02.18121
121
'6.0'
kgmmlI
rVR
=××==
== ωω
Substituting these values in equ(i) ,
( )iiV
V
s
s
−=+∴
×+×××+××=××
12'84.34.2
'96.06.0'6.082.122.152'
'
ω
ωω
Now, we have coefficient of restitution, 8.0=ε

Downloaded from www.jayaram.com.np/ -85
[ ]8.0,0,/5,
collision before velocity Relativecollisionafter velocity Relative,
''
===−−
=
=
εε
ε
RsRs
sR VsmVVVVV
or
or
( )iiiVVor
VVor
sR
sR
−=−
×=−
4,
58.0,''
''
When the rod rotates about A, then ( )ivVR −= '6.0' ω From (iii) and (iv), )(4'2.1 ' vvs −=−ω
Solving (ii) and (v), we get:
smVsrad
c /143.0/21.3'
' =
=ω
3. A 20 gm bullet ‘B’ is fired with a horizontal velocity of 450 m/s into the side of a 10 kg square panel suspended from a hinge at ‘A’. Knowing that the panel is initially at rest, determine: (a) The angular velocity of the panel immediately after the bullet becomes embedded. (b) The impulsive reaction at ‘A’ assuming that the bullet becomes embedded in 0.0006 sec. Solution: Applying Impulse-Momentum Equation: (System Momentum)1 + (System External Impulse)1-2 = (System Momentum)2 Taking moments about A:
( ) ( ) ( )1225.035.0 22 −+=× wIvmvm ppBB
x-components: ( )22 −=∆+ vmtAvm pxBB
y-components: ( )300 −=∆+ tAy
M.O.I. for square panel ( )( ) 222 3375.045.01061
61 kgmmbI ===
Putting values in equ(i), we get: ( ) ( )4225.0 22 −= wv
Again, putting value of 2v in equ(i) (0.020) (450) (0.350) = (10) (0.225w2) (0.225) + 0.3375 w2 w2 = 3.73 rad/s
smwv /839.0225.0 22 =×=∴
Putting standv 0006.02 =∆ into equ(2) (0.020) (450)+Ax (0.0006) = 10 (0.839) Ax = -1017N ∴Ax = 1017 ( )←

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -86
From equ(3) ∴ Ay = 0

Downloaded from www.jayaram.com.np/ -87
equilibriumposition
unstretenedposition(no wt)
T = K et
st
P
Q
Q’-Xm
w maequlibrium
oT=K( st +x)
+Xm
x
Chapter – 10 Mechanical Vibrations
10.1.1 Introduction
• A mechanical vibration is the motion of a particle or a body which oscillates about a position of equilibrium. When a system is displaced from a position of stable equilibrium, it tends to return to its initial position under the action of restoring force or elastic force.
• The time interval required for the system to complete a full cycle of motion is called period of vibration ( )τ .
• The number of cycles per unit time is called frequency(f). • The maximum displacement from mean position is called as amplitude of the vibration (A).
Types of Vibrations: Free Vibration : Vibration only due to restoring force like elastic force. Forced Vibration : Vibration due to external periodic force. Undamped Vibration : Effect of friction may be neglected Damped Vibration : Effect of friction is considered ; the vibration slowly decreases and comes to
halt. 10.1.2 Undamped Free Vibration of
Particles: Let us consider a mass ‘m’ attached to a spring having constant K. At equilibrium condition, ( )iKTW st −== δ
where, W = Weight of particle T = Force exerted by spring =stδ Elongation of the spring
The particle is displaced through a
distance ‘x’ m from its equilibrium position and released
with no initial velocity. Then it will move back and forth through its equilibrium.
At any position of displacement x, the

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -88
magnitude of the resultant force ( F ) is given by:
( )
( ) [ ]WKceiiKxFKxKWxKWF
st
st
st
=−−=∴−−=+−=
δδδ
sin
The negative sign indicates that the force is towards the equilibrium position. From (ii)
( ) [ ]
( ) ⎥⎦
⎤⎢⎣
⎡==−=+
=⎟⎠⎞
⎜⎝⎛+
−=+
=+⇒=+
frequencycircular is mKP where,P
mK Putting0,
0,
order 2nd of equ dist.linear iswhich 0,
00
222
2
2
2
n2
2
ivxPdt
xdor
xmK
dtxdor
iiiKxdt
xdmor
kxxmKxF &&
The motion defined by equ(iv) is called as Simple Harmonic Motion. Particular solution of the above differential equation i.e. ptxptx cos&sin 21 ==
And, the general solution : ( )ivptBptAxBxAxx
−+=∴+=
cossin21
Differentiating above equation with respect to time, we get: ( )viptBPptAPxv −−== sincos& Again, differentiating w.r.t. time, we get: ( )viiptBPptAPxa −−−== cossin 22&& The value of arbitrary constant A and B depends upon the initial conditions of motion. At time t=0, position ,oxx = then from equ(v)
( )ixxB o −=
Again, at time t=0, Velocity ovv = then from equ(vi)
( )xPvA o −=
The vibration also can be represented in circular motion of point Q with angular velocity P and radius of rotation x m which form a simple harmonic motion. From the equation of simple harmonic motion in circular motion, we have:
-Xm
o
x
t+Xm
Xm

Downloaded from www.jayaram.com.np/ -89
( )( )( )
π
πτ
φ
φφ
21 Vibration, ofFrequency
and2,
sin
cossin
2
Pef
PPeriod
ptPxxa
ptPxxvptxx
m
m
m
==
=
+−==
+==∴+=
&&
&
Again,
( )
( ) 2onAccelerati Maximum
Velocity Maximum
Pxa
Pxv
mm
mm
=
=
10.1.3 Free Vibration of Rigid Bodies: Analysis of vibration of rigid bodies is done as that of particle and the D’Alembert’s Principle is applied to solve the unknown parameters and calculate t & p. We have differential equations for free vibration as
( )iP
dt
andxPdt
xdt
−=+
=+
0d
ntdisplacemeangular For 0
22
2
22
2
θθ
Let us consider a square plate of ‘2b’ sides, which is suspended from the mid-points ‘O’ on one of its sides. If the plate is tilted such that ‘OG’ makes angle ‘θ’ then we have,
[ ]2
22'&&'
θ
θωθαθ
θαθω
&
&&&Q&&
&&&
mbma
brabrambam
x
ntt
=
=====
==
Now, Applying D’Alembert’ Principle,
( ) θθθ
αθ&&&& Ibbmwbor
Ibmabwor
OaboutmOm
t
effext
+=−
+=−
= ∑∑
sin,
.sin,
about
Now for Square Plate,
( )iibg
bgor
mbmgbor
mbmbmgb
mbI
−=+⇒−=
=−
+=
==
0sin53sin
53,
35sin,
32sin-
:get wemg, wPutting&32
2
22
2
θθθθ
θθ
θθθ
&&&&
&&
&&&&

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -90
( ) [ ]smallforiiibg
==−⎥⎦⎤
⎢⎣⎡ =+ θθθθθ sin0
53&&
which is the equation of simple harmonic motion comparing with equ(i), we get:
21
53
⎟⎠⎞
⎜⎝⎛=
bgP
Then, ( )vigb
P−==
3522 ππτ
Comparing this equation with that of pendulum,
gl
p πτ 2=
we get effective length, 3
5bl = , This shows that the square plate will oscillate as a pendulum with
effective length 3
5b with ‘O’ as its center.
10.2 Steady Harmonic Force Undamped Vibration These vibrations occur when a system is subjected to a periodic force or when it is elastically connected to a support. Consider a body of mass ‘m’ suspended from a spring and subjected to period force P of magnitude tsnPm ω= undergoing damped vibration.
At any displacement x from equilibrium position, then the equation of motion will be given by: ∑ =↓+ maF
( ) [ ]wkitPkxxmorxmkxkwtPor
xmamxkwtPor
stm
stm
stm
=−=+=−−−
==+−+
δωδωδω
Q&&
&&
&&
sin,sin,
)(sin,
This is homogenous differential equation. Its general solution = Particular solution + Complementary Solution Particular solution of (i) can be obtained by trail method of
( )
( )iiitxx
iitxx
m
m
−−=
−=
ωω
ω
sin
sin2&&
Putting values of (ii) & (iii) in (i), we get: tPtkxtxmw mmm ωωω sinsinsin2 =+−
Solving,
( ) [ ]frequencycircular is P,/
1
(
2
2)
PmkPuttingivpw
kPX
mwkP
XAmplitude
mm
mm
=−−
=∴
−=
The general solution is given by ( )vtxptBptAx m −++= ωsincossin

Downloaded from www.jayaram.com.np/ -91
The first two terms of equ(v) represent a free vibration of the system and the third part represents forced vibration and the frequency involved is forced frequency.
( )( )v
PwkPx
FactorionMagnificatm
m −−
== 211
Tutorial 1. A 50 kg block moves between vertical guides as shown. The block is pulled 40 mm down from its equilibrium position and released. Determine the period of vibration, the maximum velocity and maximum acceleration of the block. Solution:
Here, 21
21 kP
kP
+=+= δδδ
For equivalent single spring with ‘k’
mkP
kkkkk
kkk
kP
kP
kP
=∴
=×+
=+
=∴
+=∴
+==
2410
6464
.
111
21
21
21
21
δ
Now,
xPxa
xPxv
mm
mm
04.0
04.0P
2 )( Period Time
2 ==
==
==πτ
2. A cylinder of mass ‘m’ and radius ‘r’ is suspended from a looped cord. One end of the cord is attached directly to a rigid support, while the other end is attached to a spring of constant ‘k’. Determine the period and frequency of vibration of the cylinder. Solution: Taking positive sense as clockwise and measuring the displacement from the equilibrium position: Here,
( ) ( )irrarxrx
−↓==∴=
==∴=
θαθα
θδθ&&&&
22
Applying D’Alembert’s principle Taking Moments
∑ ∑= '''' AaboutmAaboutm effext
( ) ( )222 −+=− αIramrTmgr For the unstretched condition, the tension in each cord is

Downloaded from www.jayaram.com.np
-By Er. Biraj Singh Thapa (Lecturer, Eastern College of Engineering, Biratnagar)/ -92
mgTo 21
21
== ω
When the cylinder is rotated by ‘θ’ the tension T2 becomes
( )322.
2
2
−+=∴+=+=
θθδ
krmgrTrkmgrkTT o
From (1) and (3), putting in (2), we get:
( ) ( ) ( ) ⎥⎦⎤
⎢⎣⎡ =+=⎥⎦
⎤⎢⎣⎡ +− 22
21
2122
21 mrImrrrmrrkmgmgr θθθ &&&&
Solving, we get:
038
=+ θθmk&&
The motion is S.H.M. where,
mkfPf
km
P
mkP
mkP
38
21
2
8322
38
382
ππ
πτπτ
=∴=
=∴=
=∴
=