Ch.02 Modeling of Vibratory Systems
11
2/2/2014 1 02. Modeling of Vibratory System HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien Vibrations 2.01 Modeling of Vibratory Systems Chapter Objectives • Compute the mass moment of inertia of rotational systems • Determine the stiffness of various linear and nonlinear elastic components in translation and torsion and the equivalent stiffness when many individual linear components are combined • Determine the stiffness of fluid, gas, and pendulum elements • Determine the potential energy of stiffness elements • Determine the damping for systems that have different sources of dissipation: viscosity, dry friction, fluid, and material • Construct models of vibratory systems Vibrations 2.02 Modeling of Vibratory Systems HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien § 1 . Introduction - Three elements that comprise a vibrating system • Inertia elements: stores and releases kinetic energy • Stiffness elements: stores and releases potential energy • Dissipation elements: express energy loss in a system - Components comprising a vibrating mechanical system • Translational motion • Rotational motion Mass, () Mass moment of inertia, ( 2 ) Stiffness, (/) Stiffness, (/) Damping, (/) Damping, (/) External force, () External moment, () Vibrations 2.03 Modeling of Vibratory Systems HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien § 2 . Inertia Elements - Translational motion - Rotational motion Slender bar = 1 12 2 Circular disk = 1 2 2 Sphere = 2 5 2 Circular cylinder = = 1 12 (3 2 +ℎ 2 ) = 1 2 2 = + 2 , : distance from the center of gravity to point Vibrations 2.04 Modeling of Vibratory Systems - Parallel-axes theorem HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien § 2 . Inertia Elements - For a mass translating with a velocity of magnitude in the − plane under the driving force • The equation governing the motion of the mass = ( ) when and are independent of time = (2.2) • The kinetic energy, , of mass = 1 2 ∙ = 1 2 2 Vibrations 2.05 Modeling of Vibratory Systems HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien § 2 . Inertia Elements - For a rigid body undergoing only rotation in the plane with an angular speed • The equation governing the rotation of the mass of inertia = (2.6) : the moment acting about the center of mass or a fixed point along the direction normal to the plane of motion : the associated mass moment of inertia • The kinetic energy of the system = 1 2 2 Vibrations 2.06 Modeling of Vibratory Systems HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
-
Upload
tantiennguyen -
Category
Documents
-
view
214 -
download
0
Transcript of Ch.02 Modeling of Vibratory Systems

2/2/2014
1
02. Modeling of Vibratory
System
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
Vibrations 2.01 Modeling of Vibratory Systems
Chapter Objectives
• Compute the mass moment of inertia of rotational systems
• Determine the stiffness of various linear and nonlinear elastic
components in translation and torsion and the equivalent
stiffness when many individual linear components are
combined
• Determine the stiffness of fluid, gas, and pendulum elements
• Determine the potential energy of stiffness elements
• Determine the damping for systems that have different sources
of dissipation: viscosity, dry friction, fluid, and material
• Construct models of vibratory systems
Vibrations 2.02 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§1.Introduction
- Three elements that comprise a vibrating system
• Inertia elements: stores and releases kinetic energy
• Stiffness elements: stores and releases potential energy
• Dissipation elements: express energy loss in a system
- Components comprising a vibrating mechanical system
• Translational motion • Rotational motion
Mass, 𝑚 (𝑘𝑔) Mass moment of inertia, 𝐽 (𝑘𝑔𝑚2)
Stiffness, 𝑘 (𝑁/𝑚) Stiffness, 𝑘𝑡 (𝑁𝑚/𝑟𝑎𝑑)
Damping, 𝑐 (𝑁𝑠/𝑚) Damping, 𝑐𝑡 (𝑁𝑚𝑠/𝑟𝑎𝑑)
External force, 𝐹 (𝑁) External moment, 𝑀 (𝑁𝑚)
Vibrations 2.03 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§2.Inertia Elements
- Translational motion 𝑚
- Rotational motion
Slender bar 𝐽𝐺 =1
12𝑚𝐿2
Circular disk 𝐽𝐺 =1
2𝑚𝑅2
Sphere 𝐽𝐺 =2
5𝑚𝑅2
Circular cylinder 𝐽𝑥 = 𝐽𝑦 =1
12𝑚(3𝑅2 + ℎ2)
𝐽𝑧 =1
2𝑚𝑅2
𝐽𝑂 = 𝐽𝐺 + 𝑚𝑑2, 𝑑: distance from the center of gravity to point 𝐺
Vibrations 2.04 Modeling of Vibratory Systems
- Parallel-axes theorem
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§2.Inertia Elements
- For a mass 𝑚 translating with a
velocity of magnitude 𝑥 in the 𝑋−𝑌
plane under the driving force 𝐹
• The equation governing the motion of the mass 𝑚
𝐹 𝑖 =𝑑
𝑑𝑡(𝑚 𝑥 𝑖)
when 𝑚 and 𝑖 are independent of time
𝐹 = 𝑚 𝑥 (2.2)
• The kinetic energy, 𝑇, of mass 𝑚
𝑇 =1
2𝑚 𝑥 𝑖 ∙ 𝑥 𝑖 =
1
2𝑚 𝑥2
Vibrations 2.05 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§2.Inertia Elements
- For a rigid body undergoing only
rotation in the plane with an angular
speed 𝜃
• The equation governing the rotation of the mass of inertia
𝑀 = 𝐽 𝜃 (2.6)
𝑀 : the moment acting about the center of mass 𝐺 or a
fixed point 𝑂 along the direction normal to the plane of
motion
𝐽 : the associated mass moment of inertia
• The kinetic energy of the system
𝑇 =1
2𝐽 𝜃2
Vibrations 2.06 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien

2/2/2014
2
§2.Inertia Elements
- Ex.2.1 Determination of mass moments of inertia
Illustrate how the mass moments of inertia of several different
rigid body distributions are determined
Solution
• Uniform Disk
The mass moment of inertia about the point 𝑂 ,
which is located a distance 𝑅 from point 𝐺
𝐽𝑂 = 𝐽𝐺 + 𝑚𝑅2 =1
2𝑚𝑅2 + 𝑚𝑅2 =
3
2𝑚𝑅2
• Uniform Bar
The mass moment of inertia about the point 𝑂
𝐽𝑂 = 𝐽𝐺 + 𝑚𝐿
2
2
=1
12𝑚𝐿2 +
1
4𝑚𝐿2 =
1
3𝑚𝐿2
Vibrations 2.07 Modeling of Vibratory Systems
𝐽𝐺 =1
2𝑚𝑅2
𝐽𝐺 =1
12𝑚𝐿2
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§2.Inertia Elements
- Ex.2.2 Slider mechanism: system with varying inertia property
A slider of mass 𝑚𝑠 slides along a uniform bar of
mass 𝑚𝑙 with a pivot at point 𝑂. Another bar,
which is pivoted at point 𝑂′, has a portion of length
𝑏 that has a mass 𝑚𝑏 and another portion of
length 𝑒 that has a mass 𝑚𝑒. Determine the rotary
inertia 𝐽𝑂 of this system and show its dependence
on the angular displacement coordinate 𝜑
From geometry, 𝑟, 𝑎𝑏, 𝑎𝑒 can be described in terms of 𝜑
𝑟2 𝜑 = 𝑎2 + 𝑏2 − 2𝑎𝑏𝑐𝑜𝑠𝜑
𝑎𝑏2 𝜑 = (𝑏/2)2+𝑎2 − 𝑎𝑏𝑐𝑜𝑠𝜑
𝑎𝑒2 𝜑 = (𝑒/2)2+𝑎2 − 𝑎𝑒𝑐𝑜𝑠(𝜋 − 𝜑)
𝑎𝑏 : the distance from the midpoint of bar of mass 𝑚𝑒 to 𝑂
𝑎𝑒 : the distance from the midpoint of bar of mass 𝑚𝑏 to 𝑂
Vibrations 2.08 Modeling of Vibratory Systems
Solution
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§2.Inertia Elements
𝑟2 𝜑 = 𝑎2 + 𝑏2 − 2𝑎𝑏𝑐𝑜𝑠𝜑
𝑎𝑏2 𝜑 = (𝑏/2)2+𝑎2 − 𝑎𝑏𝑐𝑜𝑠𝜑
𝑎𝑒2 𝜑 = (𝑒/2)2+𝑎2 − 𝑎𝑒𝑐𝑜𝑠(𝜋 − 𝜑)
The rotary inertia 𝐽𝑂 of this system
𝐽𝑂 = 𝐽𝑚𝑙+ 𝐽𝑚𝑠
(𝜑) + 𝐽𝑚𝑏(𝜑) + 𝐽𝑚𝑒
(𝜑)
where
𝐽𝑚𝑙=
1
3𝑚𝑙𝑗
2
𝐽𝑚𝑠(𝜑) = 𝑚𝑠𝑟
2(𝜑)
𝐽𝑚𝑏𝜑 = 𝑚𝑏
𝑏2
12+ 𝑚𝑏𝑎𝑏
2 = 𝑚𝑏
𝑏2
3+ 𝑎2 − 𝑎𝑏𝑐𝑜𝑠𝜑
𝐽𝑚𝑒𝜑 = 𝑚𝑒
𝑒2
12+ 𝑚𝑒𝑎𝑒
2 = 𝑚𝑒
𝑒2
3+ 𝑎2 − 𝑎𝑒𝑐𝑜𝑠(𝜋 − 𝜑)
Vibrations 2.09 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
1.Introduction
- Stiffness elements are manufactured from different materials
and they have many different shapes
- Application
• to minimize vibration transmission from machinery to the
supporting structure
• to isolate a building from earthquakes
• to absorb energy from systems subjected to impacts
Vibrations 2.10 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
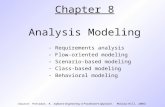
- Some representative types of stiffness elements that are
commercially available along with their typical application
Vibrations 2.11 Modeling of Vibratory Systems
Building or highway
base isolation for
lateral motion using
cylindrical rubber
bearings
Wire rope isolators to isolate vertical motions of machinery
Steel cable
springs
used in a
chimney
tuned
mass
damper to
suppress
lateral
motions
Air springs used in
suspension systems to
isolate vertical motions
Typical steel
coil springs
for isolation
of vertical
motions
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
- The stiffness elements store and release the potential energy
of a system
- Consider a spring under acting force of magnitude 𝐹 is
directed along the direction of the unit vector 𝑗
𝐹𝑠 = −𝐹 𝑗
𝐹𝑠 tries to restore the stiffness element to its undeformed
configuration, it is referred to as a restoring force
Vibrations 2.12 Modeling of Vibratory Systems
Stiffness element with a force acting on it Free-body diagram
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien

2/2/2014
3
§3.Stiffness Elements
- As the stiffness element is deformed, energy is stored in this
element, and as the stiffness element is undeformed, energy
is released
- The potential energy 𝑉 is defined as the work done to take
the stiffness element from the deformed position to the
undeformed position; that is, the work needed to undeform
the element to its original shape
𝑉 𝑥 = 𝑑𝑒𝑓𝑜𝑟𝑚𝑒𝑑 𝑝𝑜𝑠𝑖𝑡𝑖𝑜𝑛
𝑖𝑛𝑖𝑡𝑖𝑎𝑙 𝑜𝑟 𝑟𝑒𝑓𝑒𝑟𝑒𝑛𝑐𝑒 𝑝𝑜𝑠𝑖𝑡𝑖𝑜𝑛
𝐹𝑠𝑑𝑥
=
𝑥
0
𝐹𝑠𝑑𝑥 =
𝑥
0
−𝐹 𝑗 ∙ 𝑑𝑥 𝑗 =
𝑥
0
𝐹𝑑𝑥
Vibrations 2.13 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
2.Linear Springs
- Translation Spring
• Deformation
𝐹 𝑥 = 𝑘𝑥 (2.9)
𝐹 : the applied force
𝑘 : the spring constant
𝑥 : the spring deflection
• The potential energy 𝑉 stored in the spring
𝑉 𝑥 =
0
𝑥
𝐹 𝑥 𝑑𝑥 =
0
𝑥
𝑘𝑥𝑑𝑥 = 𝑘
0
𝑥
𝑥𝑑𝑥 =1
2𝑘𝑥2
Vibrations 2.14 Modeling of Vibratory Systems
(2.10)
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
- Torsion Spring
• Deformation
𝜏 𝜃 = 𝑘𝑡𝜃 (2.11)
𝜏 : the applied moment
𝑘𝑡 : the spring constant
𝜃 : the spring deflection
• The potential energy 𝑉 stored in the spring
𝑉 𝜃 =
0
𝜃
𝜏 𝜃 𝑑𝜃 =
0
𝜃
𝑘𝑡𝜃𝑑𝜃 =1
2𝑘𝑡𝜃
2
Vibrations 2.15 Modeling of Vibratory Systems
(2.12)
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
- Combinations of Linear Springs
• Parallel Springs
Translation springs
Total force
𝐹 𝑥 =𝐹1 𝑥 +𝐹1 𝑥 =𝑘1𝑥+𝑘2𝑥= 𝑘1 +𝑘2 𝑥 =𝑘𝑒𝑥
Equivalent spring
𝑘𝑒 = 𝑘1 + 𝑘2
Torsion springs
Total moment
𝜏 𝜃 = 𝜏1 𝜃 + 𝜏2 𝜃
= 𝑘𝑡1𝜃 + 𝑘𝑡2
𝜃 = 𝑘𝑡1+ 𝑘𝑡2
𝜃 = 𝑘𝑡𝑒𝜃
Equivalent spring
𝑘𝑡𝑒= 𝑘𝑡1
+ 𝑘𝑡2
Vibrations 2.16 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
• Series Springs
Translation springs
𝑥 = 𝑥1 + 𝑥2 =𝐹
𝑘1+
𝐹
𝑘2=
1
𝑘1+
1
𝑘2𝐹 =
𝐹
𝑘𝑒
Equivalent spring
𝑘𝑒 =1
𝑘1+
1
𝑘2
−1
=𝑘1𝑘2
𝑘1 + 𝑘2
Torsion springs
𝜃 = 𝜃1 + 𝜃2 =𝜏
𝑘𝑡1
+𝜏
𝑘𝑡2
=1
𝑘𝑡1
+1
𝑘𝑡2
𝜏 =𝜏
𝑘𝑡𝑒
Equivalent spring
𝑘𝑡𝑒=
1
𝑘𝑡1
+1
𝑘𝑡2
−1
=𝑘𝑡1
𝑘𝑡2
𝑘𝑡1+ 𝑘𝑡2
Vibrations 2.17 Modeling of Vibratory Systems
Displacement
Displacement
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
- Spring Constants for Some Common Elastic Elements
1. Axially loaded rod or cable
𝑘 =𝐴𝐸
𝐿
𝐴 : cross-sectional area, 𝑚2
𝐸 : Young’s modulus of elasticity, 𝑁/𝑚2
𝐿 : length of the rod, 𝑚
2. Axially loaded tapered rod
𝑘 =𝜋𝐸𝑑1𝑑2
4𝐿
𝐸 : Young’s modulus of elasticity, 𝑁/𝑚2
𝑑1 : rod diameter, 𝑚
𝑑2 : rod diameter, 𝑚
𝐿 : length of the rod, 𝑚
Vibrations 2.18 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien

2/2/2014
4
§3.Stiffness Elements
3. Hollow circular rod in torsion
𝑘𝑡 =𝐺𝐼
𝐿
𝐺 : shear modulus of elasticity, 𝑁/𝑚2
𝐼 : the torsion constant (polar moment of inertia), 𝑚4
For the concentric circular tubes,
𝐿 : length of the rod, 𝑚
𝑑𝑜 : outside rod diameter, 𝑚
𝑑𝑖 : inside rod diameter, 𝑚
4. Cantilever beam
𝑘 =3𝐸𝐼
𝑎3, 0 < 𝑎 ≤ 𝐿
𝐸 : Young’s modulus of elasticity, 𝑁/𝑚2
𝐼 : the area moment of inertia about the bending axis, 𝑚4
𝑎 : position of applied force, 𝑚
𝐿 : length of the beam, 𝑚
Vibrations 2.19 Modeling of Vibratory Systems
𝐼 =𝜋(𝑑𝑜
4 − 𝑑𝑖4)
32
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
5. Pinned-pinned beam (Hinged, simply supported)
𝑘 =3𝐸𝐼(𝑎 + 𝑏)
𝑎2𝑏2
𝐸 : Young’s modulus of elasticity, 𝑁/𝑚2
𝐼 : the area moment of inertia about the bending axis, 𝑚4
𝑎,𝑏: position of applied force, 𝑚
6. Clamped-clamped beam (Fixed-fixed beam)
𝑘 =3𝐸𝐼(𝑎 + 𝑏)3
𝑎3𝑏3
𝐸 : Young’s modulus of elasticity, 𝑁/𝑚2
𝐼 : the area moment of inertia about the bending axis, 𝑚4
𝑎,𝑏: position of applied force, 𝑚
Vibrations 2.20 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
7. Two circular rods in torsion
𝑘𝑡𝑒= 𝑘𝑡1
+ 𝑘𝑡2, 𝑘𝑡𝑖
=𝐺𝑖𝐼𝑖𝐿𝑖
𝐺𝑖 : modulus of elasticity, 𝑁/𝑚2
𝐼𝑖 : the torsion constant (polar moment of inertia), 𝑚4
𝐿𝑖 : position of applied force, 𝑚
8. Two circular rods in torsion
𝑘𝑡𝑒=
1
𝑘𝑡1
+1
𝑘𝑡2
−1
, 𝑘𝑡𝑖=
𝐺𝑖𝐼𝑖𝐿𝑖
𝐺𝑖 : modulus of elasticity, 𝑁/𝑚2
𝐼𝑖 : the torsion constant (polar moment of inertia), 𝑚4
𝐿𝑖 : position of applied force, 𝑚
Vibrations 2.21 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
9. Coil springs
𝑘 =𝐺𝑑4
8𝑛𝐷3
𝐺 : modulus of elasticity, 𝑁/𝑚2
𝑑 : wire diameter, 𝑚
𝑛 : number of active coil
𝐷 : mean coil diameter, 𝑚
10. Clamped rectangular plate, constant thickness, force at center
𝑘 =𝐸ℎ3
12𝛼𝑎2(1 − 𝜈2)
𝐸 : Young’s modulus of elasticity, 𝑁/𝑚2
ℎ : thickness of plate, 𝑚
𝛼 : coefficient
𝑎 : width of the plate, 𝑚
𝜈 : poison ratio
Vibrations 2.22 Modeling of Vibratory Systems
𝑏/𝑎 𝛼1.0 0.005601.2 0.006471.4 0.006911.6 0.007121.8 0.007202.0 0.00722
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
- Force-displacement relationships may also be used to
determine parameters such as 𝑘 that characterize a stiffness
element
Vibrations 2.23 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
- Ex.2.3 Equivalent stiffness of a beam-spring combination
Consider a cantilever beam that has a spring attached at its free end
• The force is applied to the free end of the spring
𝑘𝑒 =1
𝑘𝑏𝑒𝑎𝑚+
1
𝑘1
−1
𝑘𝑏𝑒𝑎𝑚 =3𝐸𝐼
𝐿3
• The force is applied simultaneously to the free end of the
cantilever beam
𝑘𝑒 = 𝑘𝑏𝑒𝑎𝑚 + 𝑘1
Vibrations 2.24 Modeling of Vibratory Systems
⟹ parrallel
⟹ series
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien

2/2/2014
5
§3.Stiffness Elements
- Ex.2.4 Equivalent stiffness of a cantilever beam with a
transverse end load
Acantilever beam:𝐸 = 72×109𝑁/𝑚2, 𝑎 = 750𝑚𝑚, 𝑑𝑖 = 110𝑚𝑚,
𝑑𝑜 = 120𝑚𝑚. Determine the equivalent stiffness of this beam
Solution
The area moment of inertia 𝐼 about the bending axis
𝐼 =𝜋
32𝑑𝑜
4 − 𝑑𝑖4
=𝜋
32120 × 10−3 4 − 110 × 10−3 4
= 5.98 × 10−6𝑚4
The equivalent stiffness of the cantilever beam
𝑘 =3𝐸𝐼
𝐿3 =3 × 72 × 109 × 5.98 × 10−6
750 × 10−3 3 = 3.06 × 106𝑁/𝑚
Vibrations 2.25 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
- Ex.2.5 Equivalent stiffness of a beam with a fixed end and a
translating support at the other end
Consider a uniform beam of length 𝐿 with flexural rigidity 𝐸𝐼. When the
beam is subjected to a transverse loading 𝐹at the translating support end, determine
the equivalent stiffness of this beam
Solution
By observation
⟺
Vibrations 2.26 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
To this end, we use Case 6 of Table 2.3 and set 𝑎 = 𝑏 = 𝐿 and
obtain
𝑘𝑓𝑖𝑥𝑒𝑑 = 3𝐸𝐼 𝑎 + 𝑏 3
𝑎3𝑏3
𝑎=𝑏=𝐿
=3𝐸𝐼 𝐿 + 𝐿 3
𝐿3𝐿3 =24𝐸𝐼
𝐿3
Recognizing that the equivalent stiffness of a fixed-fixed beam
of length 2𝐿 loaded at its middle is equal to the total equivalent
stiffness of a parallel spring combination of two end loaded
beams, we obtain that
𝑘𝑒 =1
2𝑘𝑓𝑖𝑥𝑒𝑑 =
1
2
24𝐸𝐼
𝐿3 =12𝐸𝐼
𝐿3
Vibrations 2.27 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
- Ex.2.6 Equivalent stiffness of a micro-electromechanical
system (MEMS) fixed-fixed flexure
A micro-electromechanical sensor
system (MEMS) consisting of four
flexures. Each of these flexures is
fixed at one end and connected to a
mass at the other end. The length of each flexure is𝐿 =100𝜇𝑚, the thickness of each flexure is ℎ = 2𝜇𝑚, and the
width of each flexure is 𝑏 = 2𝜇𝑚. A transverse loading acts on
the mass along the 𝑍-direction, which is normal to the 𝑋 − 𝑌plane. Each flexure is fabricated from a poly-silicon material,
which has a Young’s modulus of elasticity 𝐸 = 150𝐺𝑃𝑎
Determine the equivalent stiffness of the system
Vibrations 2.28 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
Solution
Each of the four flexures can be treated as a beam that is fixed
at one end and free to translate only
at the other end, similar to the
system in Ex.2.5
The equivalent stiffness of each
flexure is given by
𝑘𝑓𝑙𝑒𝑥𝑢𝑟𝑒 =12𝐸𝐼
𝐿3 , 𝐼 =𝑏ℎ3
12The equivalent stiffness of the system
𝑘𝑒 = 4 × 𝑘𝑓𝑙𝑒𝑥𝑢𝑟𝑒 = 4 ×12𝐸 ×
𝑏ℎ3
12𝐿3 = 4
𝐸𝑏ℎ3
𝐿3
= 4150 × 109 × 2 × 10−6 × 2 × 10−6
100 × 10−6 = 9.6𝑁/𝑚
Vibrations 2.29 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
- Ex.2.7 Equivalent stiffness of springs in parallel: removal of a restriction
Determine of the equivalence spring constant for
the parallel springs subjected to unequal forces
Solution
From similar triangles
𝑥 = 𝑥2 +𝑏
𝑎 + 𝑏𝑥1 − 𝑥2 =
𝑏
𝑎 + 𝑏𝑥1 +
𝑎
𝑎 + 𝑏𝑥2
Consider the bar
𝐹 = 𝐹1 + 𝐹2
𝑏𝐹2 = 𝑎𝐹1
Therefore
𝑥1 =𝐹1
𝑘1=
𝑏𝐹
𝑘1 𝑎 + 𝑏, 𝑥2 =
𝐹2
𝑘2=
𝑎𝐹
𝑘2 𝑎 + 𝑏
Vibrations 2.30 Modeling of Vibratory Systems
⟹ 𝐹1 =𝑏𝐹
𝑎 + 𝑏, 𝐹2 =
𝑎𝐹
𝑎 + 𝑏
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien

2/2/2014
6
§3.Stiffness Elements
⟹ 𝑥 =𝑏
𝑎 + 𝑏𝑥1 +
𝑎
𝑎 + 𝑏𝑥2
=𝑏
𝑎 + 𝑏
𝑏𝐹
𝑘1 𝑎 + 𝑏+
𝑎
𝑎 + 𝑏
𝑎𝐹
𝑘2 𝑎 + 𝑏
=𝐹
𝑎 + 𝑏 2
𝑘1𝑎2 + 𝑘2𝑏
2
𝑘1𝑘2
For the equivalent system
𝐹 = 𝑘𝑒𝑥
⟹ 𝑘𝑒 =𝐹
𝑥The equivalence spring constant for the parallel
springs subjected to unequal forces
𝑘𝑒 =𝑘1𝑘2 𝑎 + 𝑏 2
𝑘1𝑎2 + 𝑘2𝑏
2
Vibrations 2.31 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
3.Nonlinear Springs
- Nonlinear stiffness elements appear in many applications,
including leaf springs in vehicle suspensions and uniaxial
micro-electromechanical devices in the presence of
electrostatic actuation
- The spring force 𝐹(𝑥)
𝐹 𝑥 = 𝑘𝑥𝑙𝑖𝑛𝑒𝑎𝑟 𝑠𝑝𝑟𝑖𝑛𝑔 𝑒𝑙𝑒𝑚𝑒𝑛𝑡
+ 𝛼𝑘𝑥3
𝑛𝑜𝑛𝑙𝑖𝑛𝑒𝑎𝑟 𝑠𝑝𝑟𝑖𝑛𝑔 𝑒𝑙𝑒𝑚𝑒𝑛𝑡
(2.23)
𝛼 : the stiffness coefficient of the nonlinear term
𝛼 > 0 hardening spring 𝛼 < 0 softening spring
𝑘 : the linear spring constant
- The potential energy 𝑉
𝑉 𝑥 = 0
𝑥
𝐹 𝑥 𝑑𝑥 =1
2𝑘𝑥2 +
1
2𝛼𝑘𝑥4
Vibrations 2.32 Modeling of Vibratory Systems
(2.24)
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
𝐹 𝑥 = 𝑘𝑥 + 𝛼𝑘𝑥3 (2.23)
§3.Stiffness Elements
- For a nonlinear stiffness element described by Eq. (2.23), the
graph is no longer a straight line. The slope of this graph at a
location 𝑥 = 𝑥𝑙 is given by
𝑑𝐹
𝑑𝑥𝑥=𝑥𝑙
= 𝑘 + 3𝛼𝑘𝑥2
𝑥=𝑥𝑙
= 𝑘 + 3𝛼𝑘𝑥𝑙2
⟹ in the vicinity of displacements in a neighborhood of 𝑥 =𝑥𝑙, the cubic nonlinear stiffness element may be replaced by
a linear stiffness element with a stiffness constant (2.25)
- The constant of proportionality 𝛼𝑘 for the nonlinear cubic
spring is determined experimentally
Vibrations 2.33 Modeling of Vibratory Systems
(2.25)
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
- Experimentally obtained data used to determine the
nonlinear spring constant 𝛼𝑘
Vibrations 2.34 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
- Ex.2.8 Nonlinear stiffness due to geometry
a. Nonlinear stiffness due to geometry
• The initial tension force
𝑇0 = 𝐹𝑠𝛾=0
= 𝑘𝛿0
• The force in the spring
𝐹𝑠 𝑥 = 𝑘𝛿0 + 𝑘 𝐿2 + 𝑥2 − 𝐿
• The force in the 𝑥-direction is obtained
𝐹𝑥 𝑥 = 𝐹𝑠𝑠𝑖𝑛𝛾 =𝐹𝑠𝑥
𝐿2 + 𝑥2=
𝑥𝑘𝛿0
𝐿2 + 𝑥2+
𝑘𝑥 𝐿2 + 𝑥2 − 𝐿
𝐿2 + 𝑥2
⟹ the spring force opposing the motion is a nonlinear function
of the displacement 𝑥 . Hence, this vibratory model of the
system will have nonlinear stiffness
Vibrations 2.35 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
Binomial expansion 1 + 𝑥 𝑛 = 1 + 𝑛𝑥 +1
2𝑛(𝑛 − 1)𝑥2 + ⋯
§3.Stiffness Elements
Cubic Springs and Linear Springs
Assume that |𝑥/𝐿| ≪ 1, using binomial expansion
1 +𝑥
𝐿
2
= 1 +𝑥
𝐿
2 1/2
= 1 +1
2
𝑥
𝐿
2
+1
8
𝑥
𝐿
4
+ ⋯
⟹ 𝐹𝑥 𝑥 = 𝑘𝛿0
𝑥/𝐿
1 + 𝑥/𝐿 2+
𝑘𝑥 1 + 𝑥/𝐿 2 − 1
1 + 𝑥/𝐿 2
= 𝑘𝛿0
𝑥/𝐿
1 +12
𝑥𝐿
2 +𝑘𝑥 1 +
12
𝑥𝐿
2− 1
1 +12
𝑥𝐿
2
= 𝑘𝛿0
𝑥
𝐿+
𝑘
2𝐿
𝑥
𝐿
3
Vibrations 2.36 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien

2/2/2014
7
§3.Stiffness Elements
𝐹𝑥 𝑥 = 𝑘𝛿0
𝑥
𝐿+
𝑘
2𝐿
𝑥
𝐿
3
When the nonlinear term is negligible
𝐹𝑥 𝑥 = 𝑘𝛿0
𝑥
𝐿= 𝑇0
𝑥
𝐿and the spring constant is proportional to the initial tension in
the spring
b. Nonlinear spring composed of a set of linear springs
Another example of a nonlinear spring is one that is piecewise
linear as shown in figure
Vibrations 2.37 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
4.Other Forms of Potential Energy Elements
Consider other stiffness elements in which there is a
mechanism for storing and releasing potential energy. The
source of the restoring force is a fluid element or a gravitational
loading
- Fluid Element
• The magnitude of the total force of the
displaced fluid acting on the rest of the fluid
𝐹𝑚 𝑥 = 2𝜌𝑔𝐴0𝑥
𝜌 : the mass density of the fluid, 𝑘𝑔/𝑚3
𝑔 : gravitational constant, 𝑚/𝑠2
𝐴0 : the manometer cross-sectional area, 𝑚2
𝑥 : the fluid displacement, 𝑚
Vibrations 2.38 Modeling of Vibratory Systems
Manometer
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
• The equivalent spring constant of this fluid system
𝑘𝑒 =𝑑𝐹𝑚
𝑑𝑥= 2𝜌𝑔𝐴0
• The potential energy
𝑉 𝑥 =1
2𝑘𝑒𝑥
2 = 𝜌𝑔𝐴0𝑥2
Alternatively, the potential energy can also be obtained
directly from the work done
𝑉 𝑥 = 0
𝑥
𝐹𝑚 𝑥 𝑑𝑥
= 2𝜌𝑔𝐴0 0
𝑥
𝑥𝑑𝑥
= 𝜌𝑔𝐴0𝑥2
Vibrations 2.39 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
- Compressed Gas
• When the piston moves by an amount 𝑥 along
the axis of the piston, 𝑉0 decreases to a
volume 𝑉𝑐
𝑉𝑐 𝑥 = 𝑉0 − 𝐴0𝑥 = 𝐴0𝐿0 1 − 𝑥/𝐿0
⟹ 𝑉𝑐 𝑥 = 𝑉0 1 − 𝑥/𝐿0
𝐴0: the piston cross-sectional area, 𝑚2
• The equation of state for the gas
𝑃𝑉𝑐𝑛 = 𝑃0𝑉0
𝑛 = 𝑐0 = 𝑐𝑜𝑛𝑠𝑡 ⟹ 𝑃 = 𝑐0𝑉𝑐−𝑛
𝑃 : gas pressure, 𝑁/𝑚2 𝑉 : gas volume, 𝑚3
𝑛 : the ratio of specific heats of the gas, when compressed
- slowly, the compression is isothermal, 𝑛 = 1
- rapidly, the compression is adiabatic, 𝑛 = 𝑐𝑝/𝑐𝑣 = 1.4
Vibrations 2.40 Modeling of Vibratory Systems
Gas compression
with a piston
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
• The magnitude of the force on the piston
𝐹 𝑥 = 𝐴0𝑃
= 𝐴0𝑐0𝑉𝑐−𝑛
= 𝐴0𝑐0𝑉0−𝑛 1 − 𝑥/𝐿0
−𝑛
⟹ 𝐹 𝑥 = 𝐴0𝑃0 1 − 𝑥/𝐿0−𝑛 (2.33)
The Eq. (2.33) describes a nonlinear force
versus displacement relationship
At the vicinity of 𝑥 = 𝑥𝑙, the stiffness of an equivalent linear
stiffness element
𝑘𝑒 = 𝑑𝐹
𝑑𝑥𝑥=𝑥𝑙
=𝑛𝐴0𝑃0
𝐿01 − 𝑥𝑙/𝐿0
−𝑛−1
For 𝑥𝑙/𝐿0 ≪ 1,
Vibrations 2.41 Modeling of Vibratory Systems
𝑘𝑒 =𝑛𝐴0𝑃0
𝐿0
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
• For arbitrary 𝑥/𝐿0, the potential energy
𝑉 𝑥 = 0
𝑥
𝐹 𝑥 𝑑𝑥
= 𝐴0𝑃0 0
𝑥
1 − 𝑥/𝐿0−𝑛𝑑𝑥
⟹ 𝑉 𝑥 = −𝐴0𝑃0𝐿0𝑙𝑛 1 − 𝑥/𝐿0 𝑛 = 1
𝐴0𝑃0𝐿0
𝑛 − 11 − 𝑥/𝐿0
−𝑛 − 1 𝑛 ≠ 1
Vibrations 2.42 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien

2/2/2014
8
§3.Stiffness Elements
- Pendulum System
• Pendulum systems: bar with uniformly
distributed mass
At 𝜃, the vertical distance through which the
center of gravity of the bar moves up from the
reference position
𝑥 =𝐿
2−
𝐿
2𝑐𝑜𝑠𝜃 =
𝐿
21 − 𝑐𝑜𝑠𝜃
The increase in the potential energy
𝑉 𝑥 = 0
𝑥
𝐹 𝑥 𝑑𝑥 = 0
𝑥
𝑚𝑔𝑑𝑥 = 𝑚𝑔𝑥
or in 𝜃
𝑉 𝜃 =1
2𝑚𝑔𝐿(1 − 𝑐𝑜𝑠𝜃)
Vibrations 2.43 Modeling of Vibratory Systems
Pendulum systems: bar
with uniformly distributed
mass
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
Taylor series approximation 𝑐𝑜𝑠𝜃 = 1 −𝜃2
2+ ⋯
§3.Stiffness Elements
𝑉 𝜃 =1
2𝑚𝑔𝐿 1 − 𝑐𝑜𝑠𝜃
≈1
2
𝑚𝑔𝐿
2𝜃2
=1
2𝑘𝑒𝜃
2
where the equivalent spring constant
𝑘𝑒 =𝑚𝑔𝐿
2
Vibrations 2.44 Modeling of Vibratory Systems
Pendulum systems: bar
with uniformly distributed
mass
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
• Pendulum systems: mass on a weightless rod
The increase in the potential energy
𝑉 𝜃 ≈1
2𝑚1𝑔𝐿𝜃2 =
1
2𝑘𝑒𝜃
2
where the equivalent spring constant
𝑘𝑒 = 𝑚1𝑔𝐿
If the weightless bar is replaced by one that
has a uniformly distributed mass 𝑚, then the
total potential energy of the bar and the mass
𝑉 𝜃 ≈1
4𝑚𝑔𝐿𝜃2 +
1
2𝑚1𝑔𝐿𝜃2 =
1
2
𝑚
2+ 𝑚1 𝑔𝐿𝜃2 =
1
2𝑘𝑒𝜃
2
where the equivalent spring constant
𝑘𝑒 =𝑚
2+ 𝑚1 𝑔𝐿
Vibrations 2.45 Modeling of Vibratory Systems
Pendulum systems: mass
on a weightless rod
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
• Pendulum systems: inverted mass on a
weightless rod
The decrease in the potential energy
𝑉 𝜃 ≈ −1
2𝑚1𝑔𝐿𝜃2
Vibrations 2.46 Modeling of Vibratory Systems
Pendulum systems:
inverted mass on a
weightless rod
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§3.Stiffness Elements
- Ex.2.9 Equivalent stiffness due to gravity loading
For “small” rotations about the upright position θ = 0,
the potential energy
𝑉 𝜃 =1
2𝑚1𝑔𝑏𝜃2 −
1
2𝑚2𝑔𝑎𝜃2
=1
2𝑚1𝑏 − 𝑚2𝑎 𝑔𝜃2
There is a gain or loss in potential energy depending
on whether 𝑚1𝑏 > 𝑚2𝑎 or vice versa
• When the bar has a uniformly distributed mass 𝑚
𝑚1 = 𝑚𝐿1/𝐿, 𝑚2 = 𝑚𝐿2/𝐿, 𝐿 = 𝐿1 + 𝐿2, 𝑏 = 𝐿1/2, 𝑐 = 𝐿2/2
𝑉 𝜃 =𝐿12 − 𝐿2
2
4(𝐿1 + 𝐿2)𝑚𝑔𝜃2 =
1
2
𝐿1 + 𝐿2
2𝑚𝑔𝜃2 =
1
2𝑘𝑒𝜃
2
where the equivalent stiffness 𝑘𝑒 = 𝐿1 + 𝐿2 𝑚𝑔/2
Vibrations 2.47 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§4.Dissipation Elements
- Damping elements are assumed to have neither inertia nor the
means to store or release potential energy
- The mechanical motion imparted to these elements is
converted to heat or sound and, hence, they are called non-
conservative or dissipative because this energy is not
recoverable by the mechanical system
- There are four common types of damping mechanisms used to
model vibratory systems
• Viscous damping
• Coulomb or dry friction damping
• Material or solid or hysteretic damping
• Fluid damping
In all these cases, the damping force is expressed as a
function of velocity
Vibrations 2.48 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien

2/2/2014
9
§4.Dissipation Elements
1.Viscous damping
- When a viscous fluid flows through a slot or around a piston in
a cylinder, the damping force generated is proportional to the
relative velocity between the two boundaries confining the fluid
- A common representation of a viscous damper is a cylinder
with a piston head
- Depending on the damper construction and the velocity
range, the magnitude of the damper force 𝐹( 𝑥) is a nonlinear
function of velocity or can be approximated as a linear
function of velocity
Vibrations 2.49 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§4.Dissipation Elements
- In the linear case, the damper force is expressed as
𝐹 𝑥 = 𝑐 𝑥 (2.46)
𝑐 : the damping coefficient, 𝑁/(𝑚/𝑠)
Viscous damping of the form given by Eq. (2.46) is also
called slow-fluid damping
- In the case of a nonlinear viscous damper described by a
function 𝐹 𝑥 , the equivalent linear viscous damping around
an operating speed 𝑥 = 𝑥𝑙 is determined as follows
𝑐𝑒 = 𝑑𝐹 𝑥
𝑑 𝑥 𝑥= 𝑥𝑙
- Linear viscous damping elements can be combined in the
same way that linear springs are, except that the forces are
proportional to velocity instead of displacement
Vibrations 2.50 Modeling of Vibratory Systems
(2.47)
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§4.Dissipation Elements
• Energy Dissipation
The energy dissipated by a linear viscous damper
𝐸𝑑 = 𝐹𝑑𝑥 = 𝐹 𝑥𝑑𝑡 = 𝑐 𝑥2𝑑𝑡 = 𝑐 𝑥2𝑑𝑡
• Parallel-Plate Damper
An example of a viscous damper is shown in the figure
The shear force acting on the
bottom plate
𝐹 𝑥 =𝜇 𝑥
ℎ𝐴 =
𝜇𝐴
ℎ 𝑥
The damping coefficient 𝑐 for the parallel-plate construction
𝑐 =𝜇𝐴
ℎ
Vibrations 2.51 Modeling of Vibratory Systems
(2.48)
(2.49)
(2.50)
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
𝑐 =𝜇𝐴
ℎ(2.50)
§4.Dissipation Elements
- Ex.2.10 Design of a parallel-plate damper
A parallel-plate damper with a top plate of dimensions100𝑚𝑚× 100𝑚𝑚 is to be pulled across an oil layer of thickness
0.2𝑚𝑚, which is confined between the moving plate and a
fixed plate. We are given that this oil is SAE30 oil, which has a
viscosity of 345𝑚𝑃𝑎𝑠 (345 × 103𝑁𝑠/𝑚2)
Determine the viscous damping coefficient of this system
Solution
To this end, using Eq. (2.50) and substitute the given values
into this expression and find that
𝑐 =𝜇𝐴
ℎ=
345×10−3 100×10−3 ×100×10−3
0.2 × 10−3 = 17.25𝑁𝑠/𝑚
Vibrations 2.52 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§4.Dissipation Elements
- Ex.2.11 Equivalent damping coefficient and
equivalent stiffness of a vibratory system
Consider the vibratory system in which the motion of mass 𝑚is restrained by a set of linear springs and linear viscous
dampers. Determine 𝑘𝑒 and 𝑐𝑒
Solution
The equivalence system
𝑘𝑒 = 𝑘1 +𝑘2𝑘3
𝑘2 + 𝑘3, 𝑐𝑒 = 𝑐1 + 𝑐2
Vibrations 2.53 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
𝑐𝑒 = 𝑑𝐹 𝑥
𝑑 𝑥 𝑥= 𝑥𝑙
(2.47)
§4.Dissipation Elements
- Ex.2.12 Equivalent linear damping coefficientof a nonlinear damper
It has been experimentally determined that the damper force-
velocity relationship is given by the function
𝐹 𝑥 = 4𝑁𝑠/𝑚 𝑥 + (0.3𝑁𝑠3/𝑚) 𝑥3
Determine the equivalent linear damping coefficient around an
operating speed of 3𝑚/𝑠
Solution
Using the Eq. (2.47)
𝑐𝑒 = 𝑑𝐹 𝑥
𝑑 𝑥 𝑥=3𝑚/𝑠
= 4 + 0.9 𝑥2
𝑥=3𝑚/𝑠= 4 + 0.9 × 32
⟹ 𝑐𝑒 = 12.1𝑁𝑠/𝑚
Vibrations 2.54 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien

2/2/2014
10
§4.Dissipation Elements
2.Other Forms of Dissipation
- Coulomb Damping or Dry Friction
This type of damping is due to the force caused by friction
between two solid surfaces
The friction force acting on the system
𝐹 𝑥 = 𝜇𝑁𝑠𝑔𝑛( 𝑥) (2.51)
𝜇 : the kinetic coefficient of friction
𝑁 : the force compressing the surfaces, 𝑁
𝑠𝑔𝑛: the signum function, 𝑠𝑔𝑛 𝑥 = +1 𝑥 > 0−1 𝑥 < 0
0 𝑥 = 0
Vibrations 2.55 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§4.Dissipation Elements
If the normal force is due to the system weight, then 𝑁 = 𝑚𝑔
𝐹 𝑥 = 𝜇𝑚𝑔𝑠𝑔𝑛( 𝑥) (2.52)
The energy dissipated in this case
(2.53)
- Fluid Damping (Velocity-Squared Damping)
This type of damping is associated with a system whose mass is
vibrating in a fluid medium. The magnitude of the damping force
𝐹 𝑥 = 𝑐𝑑 𝑥2𝑠𝑔𝑛 𝑥 = 𝑐𝑑| 𝑥| 𝑥 (2.54)
𝑐𝑑 : friction coefficient, 𝑐𝑑 = 𝐶𝜌𝐴/2
𝐶 : drag coefficient
𝜌 : the mass density of the fluid
𝐴 : the projected area of the mass in a direction normal to 𝑥
Fluid damping of (2.54) is often referred to as fast-fluid damping
Vibrations 2.56 Modeling of Vibratory Systems
𝐸𝑑 = 𝐹𝑑𝑥 = 𝐹 𝑥𝑑𝑡 = 𝜇𝑚𝑔 𝑠𝑔𝑛 𝑥 𝑥𝑑𝑡
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§4.Dissipation Elements
The energy dissipated
𝐸𝑑 = 𝐹𝑑𝑥 = 𝐹 𝑥𝑑𝑡 = 𝑐𝑑 𝑠𝑔𝑛( 𝑥) 𝑥3𝑑𝑡
- Structural or Solid or Hysteretic Damping
This type of damping describes the losses in materials due to
internal friction. The damping force is a function of
displacement and velocity and is of the form
𝐹 = 𝑘𝜋𝛽ℎ𝑠𝑔𝑛 𝑥 |𝑥| (2.57)
𝛽ℎ : an empirically determined constant
The energy dissipated
𝐸𝑑 = 𝐹𝑑𝑥 = 𝐹 𝑥𝑑𝑡 = 𝑘𝜋𝛽ℎ 𝑠𝑔𝑛( 𝑥)|𝑥|𝑑𝑡
Vibrations 2.57 Modeling of Vibratory Systems
(2.54)
(2.58)
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§5.Model Construction
1.Introduction
- In this section, four examples are provided to illustrate how
the previously described inertia, stiffness, and damping
elements are used to construct system models
- Modeling is an art, and often experience serves as a guide in
model construction
- In this section, the examples are drawn from different areas,
and are presented in a progressive order proceeding from
the use of discrete inertia, stiffness, and damping elements in
a model to distributed elements, and finally, to a combination
of distributed and discrete elements
- As discussed in the subsequent chapters, the mass,
stiffness, and damping of a system appear as parameters in
the governing equations of the system
Vibrations 2.58 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§5.Model Construction
2.A Micro-electromechanical System
Micro-electromechanical accelerometer and a vibratory model
of this sensor
Vibrations 2.59 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§5.Model Construction
3.The Human Body
Human body and a vibratory model
Vibrations 2.60 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien

2/2/2014
11
§5.Model Construction
4.A Ski
Cross-country ski, which is a physical system with distributed
stiffness and inertia properties, and its vibratory model
Vibrations 2.61 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§5.Model Construction
5.Cutting Process
Work-piece-tool turning system and vibratory model of this
system
Vibrations 2.62 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
§6.Design for Vibration
Vibrations 2.63 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien
Exercises
Vibrations 2.66 Modeling of Vibratory Systems
HCM City Univ. of Technology, Faculty of Mechanical Engineering Nguyen Tan Tien