Ch-7 Root Locus and Contour Slide
46
Chapter 7 ROOT LOCUS
-
Upload
tushar-gupta -
Category
Documents
-
view
117 -
download
1
Transcript of Ch-7 Root Locus and Contour Slide

Chapter 7
ROOT LOCUS

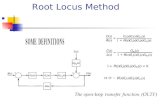
R + K GC
H
-
E
C
R
K G s
K G s H s====
++++
( )
( ) ( )1

1+ K G(s) H(s) = 0 is called the
characteristic equation of the system
and its roots are closed loop poles.
Root locus is the locus of the roots of
the characteristic equation as
parameter K is varied ( 0 < K < ∞∞∞∞)

+K
C
-
1
1s ++++
First order System
R
Closed loop Pole, s = - 1 - K

K ←←←←∞∞∞∞ K = 0
××××- 1
Root locus for G(s)H(s) = 1/(s+1)
�closed loop system is stable for all K
�As K is increased, closed loop pole is
moved farther away from imaginary axis;
hence the time constant reduces. i.e.
Transient response improves.

K ←←←←∞∞∞∞
K = 0××××1
s = 1 - K
K = 1
Root locus forG(s)H(s) = 1/(s-1)
From the plot ,
for K < 1, system is unstable
K G H = K
s - 1Ex:

+K
-)1+s(s
1
Second Order
CR
Ch Eq: s2 + s + K = 0
closed loop poles at2
41±-0.5
K -

For K = 0 : Roots at 0 and - 1
For 0 < K < 0.25 :
Roots are real and equidistant
from -0.5.
For K = 0.25 : Roots at -0.5
For K > 0.25: Roots are complex
conjugate with real part at - 0.5

0.5××××0××××
-1
>
>
>
>
Root locus forG(s)H(s) = 1/s(s+1)
• locus is always symmetric about the real axis
• closed loop system is stable for all K
• system under damped for K > 0.25
• damping factor reduces as K increases

+ K G
H
-
Ch Eq: 1 + K G H = 0
R C
For systems of order 3 & above, it is difficult
to solve for roots and hence we will work
out short cuts to plot the root locus.

K G H = - 1=
Magnitude of K G H = 1
→Magnitude Criterion
1∠180°
Phase angle of K G H
= Phase angle of G H, as ∠K = 0
= (2n+1) 180° where n = 0,1,2,….
→Angle Criterion
&

The method :
On the s - plane, check for the angle
of G H at a chosen (Test) point….
If the angle criterion is satisfied,
the point is on the locus.
Substitute in magnitude criterion to find K, at that point.

°=°°
=
180- )45-135 -∠(
pointat test (s) F∠
××××
.
-1××××0
j1
-2
Point is on locus
K GH = 1= K/s(s+2)
K/s(s+2) =1 at s= -1+j1
K =2
Ex:2) + s s(
K = F(s)
is -1 + j 1 lie on locus ? If yes, K=?

Ch. eq:1 + K G H = 0
0)...p+)(s p+ (s
)... z + (s ) z + (sK + 1
2 1
21 =or
or (s +p1)(s +p2)…+ K (s + z1)(s + z2)… = 0
for K = 0, s = - p1, - p2, ...
K = 0, open loop poles are closed loop poles.
i.e. From every open loop pole, a branch of the root locus STARTS .

0)...p+)(s p+ (s
)... z + (s ) z + (sK + 1
2 1
21 =
(s +p1)(s +p2)…+ K (s + z1)(s + z2)…= 0
or (1/K)(s +p1)(s +p2)…+ (s +z1)(s +z2)..= 0
for K = ∞, s = - z1,- z2, ...
Open loop zeroes are closed loop poles
i.e. Each branch of the root locus ENDSat a open loop zero

Ex:1) + s (
1 G(s)H(s)=
s = - 1, is the open loop pole
Hence the root locus STARTS at s = - 1
There is no open loop zero at a finite point. However, the function goes to zero as ∞∞∞∞→→→→s
========1) + s (
1G(s)
s1+1
s1
0 = G(s) , s As ∞→
i.e. The open loop zero is at infinity.

. .××××- 1T2 T1
At T1
angle = 0°°°°, T1
is not on locus
At T2
angle = 180°°°°, T2
is on locus
K ←←←←∞∞∞∞ K = 0××××
- 1
Ex

××××
.T2
×××××××××××× . .T3T4
Example
- 2 0
T1 .
T1 - not on locusT2 - on locusT3 - on locusT4 - not on locus.
∴Locus on real axis
is from 0 to - 2

Rule : Real axis locus
Point on real axis is part of locusif Number of open loop zeroes & poles to
right of test point are ODD.

Example :2) 1 +s (
1 =H(s) )s(G
××××K= 0
-1××××
No locus on real axis

××××
T
-1××××
.
θθθθ
At any point ‘T’,Angle = - 2 θθθθ
= - ( 2n + 1 ) 180 °°°°∴∴∴∴ θθθθ = 90 °°°° , 270 °°°°

××××××××-1
Root locus For 2) 1 +s (
1 = )s(H)s(G

××××
××××-1
j 1
-j 1
Root locus for ?

××××××××-1
××××
Example :3) 1 +s (
1 =H(s) )s(G
real axis locus from - 1 to ∞∞∞∞

.
××××
T
××××θ
××××
At any point T, -3θθθθ = - ( 2n + 1 ) 180 °°°°∴∴∴∴ θθθθ = 60 °°°° , 180 °°°° 300°°°°
××××××××××××3) 1 +s (
1 = )s(H)s(G
Root locus
for

Ex.2) (s 1) (s s
1 GH
++++++++====
1. Locus starts at s = 0, -1, -2, 2
2. All three branches go to infinity
3. Real axis locus from 0 to -1 & -2 to - ∞∞∞∞4. Break away point between 0 and -1
×××××××× ××××-2 -1 0
> <<

break away point, dK / ds = 0
3 s2 + 6s + 2 = 0
31 1 - s ±±±±====
= - 0 .42 or - 1. 58
s = - 0 .42 is the break away point
5. Imaginary axis crossing: Ch. Equation :

s3 + 3s + 2s + K = 0
s3
s2
s1
s0
1 2
3
K - 6
K
3K

Closed loop system is stable for 0 < K < 6
K = 6, A(s) = 3s2 + 6 = 0 , 2 j s ±±±±====
The locus crosses imaginary axes at
2 j s ±±±±==== with K = 6

Asymptotes :
G H = 1
( s + ) A
n - mσσσσ
Consider GH with n poles & m zeroes m n ≥≥≥≥
Suppose all poles are at point A - = s σ
i.e. (n - m) branches go to infinity at angle
.... ) m -n (
) 1 + 2q ( 180 =
°±θ

When n poles and m zeroes are distributed ,
G H
i
n=
s + z )
( s + p )
i=1
m
i
= 1i
∏∏∏∏
∏∏∏∏
(
=
( s + p ) ( s + z )= 1
i= 1
i
1
i
n
i
m
∏∏∏∏ ∏∏∏∏
... + s )z -p ( + s
1 =
1 - m -n
ii
m -n ΣΣ

Considering very large values for s, we take first 2 terms
When s takes very large values , all poles and zeroes may be considered
to be at the same point.
) + s (
1
) p + s (
) z + s (
= H m -n
Ai
1 =
i
m
1=i
σ=∴
∏
∏n
i
G

1 - m -n
ii
m -n m -n
A s )z -p ( + s = ) + s ( ΣΣσ∴
Or
) m-n (
z -p = - ii
A
ΣΣ−σ∴
-σσσσ A is known as centroid
zeroes.) of no. - poles of (no.
zeroes) ofpart (real - poles) ofpart real (
ΣΣ=

×××× ××××<××××-2 0
<-1
>
2j
asymptotes
While two branches cross Imaginary axis and go
to ∞∞∞∞, the third branch from - 2 goes to - ∞∞∞∞

The third order system can be approximated as a
second order system with dominant pole pairs
located on the complex conjugate parts the third
closed loop pole is on the negative real axis far
away from imaginary axis.

P1 - P2 dominant pole pair
×××× ××××< ×××× <>
..
P1
.P2
P3
°°°°====
====
45
0.707,
θθθθ
ζζζζFor
(θθθθ

K = 0
××××- 1
××××
××××
××××- 2
K = 0
K = 0
K = 0
0
- j1
j1
Example:

) 2 2s 2s ( 2) s ( s
1 HG
++++++++++++====
• 4 branches go to infinity
• Real axis locus from 0 to -2
°±°±=+°±
=θ 135 ,45 4
)1n2(180
A
1- 4
1 - 1 - 2 - 0 = A
=σ−

1- = s 0, = 31)+(s 0 = 1+3s+23s+3sor 0= 4+12s+212s+34s
0 = ds/dK →
j1 = s,5K ±=
Imaginary axis crossing :
Break Away Pt

Angle of departure from a complex conjugate pole :
××××
××××××××××××
P θθθθ
Let P be the point in the neighbourhood of
s = - 1 +j 1(open loop pole)
°θ
°−=−−−θ−
90 - =
180 45 135 90

××××
××××
××××××××-2 0
-j1
j1
> <
<
<<
<
<
<

Root Contours
Locus of closed loop
poles as any other
parameter also is
varied.

‘K‘ and ‘a’ are varied
+K
- a)s(s
1
+
Example :

Characteristic Equation :
s2 + a s + K = 0 ⇒⇒⇒⇒ ( s2 + K )+a s = 0
0 K s
s . a 1
2=
++
This equation is similar to 1+KGH = 0
With ‘a’ varying, we plot the locus with
open loop zero at s = 0 and open loop
poles at K j s ±=

××××
××××a = 0
∞∞∞∞====a
0
a = 0
.
a ←∞<
>
< >

××××
××××K = 1
0
j 2
..
<
>
< >
××××
××××<
>
>
j 1K = 4
.
.
.
.
Root Contours
<