不忘初心 继续前行 - gxepa.org.cn · 55 禤彦玲 以党员体验式教育助力电网建设经验谈 本刊已入编“万方数据——数字化 期刊群”、“中国知网(cnki)系列数据

第二节 陀螺罗经
概述
1.发展
法国物理学家列昂.福科(Leon Foucault) 1852 年提出的陀螺指向理论;
现代船舶上普遍使用的陀螺罗经于本世纪初研制成功的船舶指向仪器。
1908 年德国生产出了安许茨型陀螺罗经(ANSCHÜTZ gyrocompass);
1911 年美国生产出了斯伯利型陀螺罗经(SPERRY gyrocompass);
1916 年英国生产出了勃朗型陀螺罗经(BROWN gyrocompass)。
2.分类
近百年,生产出了近百种型号的陀螺罗经,主要分为三大系列或两大类型。
按照结构特点和工作原理分为三大系列:即安许茨系列;斯伯利系列;阿玛-勃朗系列。
按照灵敏部分转子个数分为两大类型:即单转子陀螺罗经和双转子陀螺罗经。
按照控制力矩的性质分为两大类型:机械摆式陀螺罗经和电磁控制式陀螺罗经。
按照阻尼方式分两大类型:水平轴阻尼陀螺罗经和垂直轴阻尼陀螺罗经。
3.与磁罗经相比较,陀螺罗经的主要优缺点
主要优点:指向精度高;多个复示器,有利于船舶自动化;不受磁干扰影响,指向误差
小;安装位置不受限制等。
主要缺点:必须有电源才能工作(可靠性较差);工作原理、结构复杂。
4.发展趋势
体积小型化;广泛采用先进技术;提高指向可靠性和使用寿命;简化维护保养。
一、陀螺罗经指北原理
1.自由陀螺仪及其特性�
1)自由陀螺仪(free gyroscope)定义
陀螺仪从广义讲就是一种能绕定点高速旋转的对称刚体。
实用陀螺仪是高速旋转的对称刚体及其悬挂装置的总称。
按其悬挂装置不同分为单自由度陀螺仪(single-degree of freedom gyro.)、二自由度
陀螺仪(two-degree of freedom gyro.)和三自由度陀螺仪(three-degree of freedom gyro.)。 平衡陀螺仪(balanced gyroscope):若陀螺仪的重心(G)与中心(O)重合。
自由陀螺仪:重心(G)与中心(O)重合,不受任何外力矩作用的三自由度平衡陀螺仪。
2)自由陀螺仪的结构
由转子(gyro wheel)、转子轴(spin axis)(主轴)、内环(horizontal ring)、内环轴
(horizontal axis)(水平轴)、外环(vertical ring)、外环轴(vertical axis)(垂直轴)、
基座组成的。
转子的转动角速度 Ω 的方向称为陀螺仪主轴的正端。
自由陀螺仪结构特点:有三个自由度,即主轴、水平轴和垂直轴;
整个陀螺仪的重心与中心重合。
——————————————————————————————————————————————

陀螺坐标系:右手坐标系,以自由陀螺仪中心(O)为坐标原点 o;陀螺仪主轴方向为纵
坐标 ox;水平轴为横坐标 oy;垂直轴为垂直坐标 oz。
3)自由陀螺仪的特性
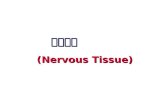
(1) 定轴性(gyroscopic intertia)
� � � � 比对实验说明�
定轴性:高速旋转的自由陀螺仪,当
不受外力矩作用时,其主轴将保持它在空
间的初始方向不变。
图 2-1-20
1-转子;2--内环;3-外环;4-固定环;5-基座
定轴性条件:陀螺转子高速旋转;陀
螺仪不受外力矩作用。
定轴性表现特征:主轴指向空间初始
方向不变。
(2)进动性(gyroscopic precession)
比对实验说明�
进动性:高速旋转的自由陀螺仪,当
受外力矩(moment)(用 M 表示)作用时,其
主轴的动量矩(momentum moment)失端(用
H 表示)将以捷径趋向外力矩 M 失端作进
动运动,记作 H → M。
图 2-1-21
进动性的条件:自由陀螺仪转子高速旋转和受外力矩作用;
进动性表现特征:主轴相对空间初始方向产生进动运动。
自由陀螺仪进动特性口诀:
陀螺仪表定向好,
进动特性最重要,
要问进动何处去?
H 向着 M 跑。
自由陀螺仪主轴进动角速度(的快慢,ωp) 与外力矩M成正比,与动量矩H成反比。
ωp =M
H
—————————————————————————————————————————— 2

右手定则:伸开右手,掌心对着主轴正端,四指并拢指向加力方向,拇指与四指垂直,
则拇指的方向就是主轴正端进动的方向。
2.自由陀螺仪的视运动
1)视运动现象
自由陀螺仪主轴具有指向空间初始方向不变的定轴性,若使自由陀螺仪主轴开始时指向
太阳,它将始终指向太阳,我们将自由陀螺仪主轴的这种运动称为自由陀螺仪的视运动。
自由陀螺仪的视运动是其主轴相对地球子午面和水平面的运动。
使自由陀螺仪产生视运动的原因是地球自转。
2)自由陀螺仪的视运动规律
图 2-1-22
地球自转的角速度用ωe表示,
分解为沿水平方向的分量ω1和沿垂直
方向的分量ω2:
ω1=ωe·cosϕ
ω2=ωe·sinϕ 将自由陀螺仪主轴与子午面的夹角称
为主轴的方位角(azimuth)(用 α 表示),
主轴与水平面之间的夹角称为主轴的高度
角(elevating annealing)(用 θ 表示)。
自由陀螺仪主轴相对子午面北纬东偏,
南纬西偏;自由陀螺仪主轴相对水平面东升
西降,全球一样。
自由陀螺仪主轴相对子午面的视运动
速度:
V2= H·ωesinϕ (V2的大小随ϕ变化)
自由陀螺仪主轴相对水平面的运动视速度:
V1= H·α·ωecosϕ (V1的大小除了随ϕ变化外,还随主轴的方位角α变化)
3.变自由陀螺仪为陀螺罗经� 1)自由陀螺仪主轴不能指北的原因
地球自转角速度的垂直分量ω2使自由陀螺仪主轴相对子午面的视运动。
2)变自由陀螺仪为陀螺罗经的方法
控制力矩(controlling moment)(用My表示):为了克服由于地球自转角速度的垂直分
量ω2使自由陀螺仪主轴相对子午面的视运动,向陀螺仪施加的外力矩;
控制力矩必须作用于陀螺仪的水平轴。
3)陀螺罗经获得控制力矩的方式
按力矩的产生原理不同:直接产生法和间接产生法;
按力矩的性质不同:重力控制力矩和电磁控制力矩;
按力矩的产生方式不同:三大系列罗经的三种主要方式。
(1)安许茨系列罗经获得控制力矩的方式
—————————————————————————————————————————— 3

将陀螺球重心下移的直接控制法获得控制力矩。
控制设备(controlling device):陀螺罗经产生控制力矩的设备(器件)。
陀螺球(gyrosphere):安许茨系列罗经是将双转子陀螺仪固定和密封在金属球内。
陀螺球具有主轴(ox 轴)、水平轴(oy 轴)和垂直轴(oz 轴)。
陀螺球的重心 G 不在其中心 O,而是沿垂直轴下移几毫米。
t = t1时,陀螺球位于A1处,此时主轴水平指东,θ = 0,重力mg作用线通过陀螺仪中心
O,重力mg不产生力矩(虽有力但力臂为零)。
图 2-1-23
t = t2 时,随着地球自转,当,陀螺球位于A2 处,此时主轴上升了一个θ角( θ ≠ 0),
重力mg作用线不通过陀螺球中心O(有力臂a),重力mg的分力mgsinθ 产生沿水平轴oy向的重
力控制力矩My:
My = mgsinθ ·a
≈ mg a ·θ = M·θ
M = mga 最大控制力矩
控制力矩的大小与罗经结构参数和主轴高度角 θ 有关
控制力矩My使主轴产生进动速度u2,它使主轴正端自动找北(向子午面进动)。
根据赖柴尔定理:动量矩 H 矢端的线速度矢量 u 与外力矩矢量 M 大小相等方向相同:
u = M 陀螺罗经控制力矩My使罗经主轴产生的进动速度:
u2= My = M·θ
—————————————————————————————————————————— 4

安许茨系列罗经称为下重式陀螺罗经,控制力矩为重力力矩,属于机械摆式罗经。
(2)斯伯利系列罗经获得控制力矩的方式
在陀螺仪主轴两端,加装液体连通器(liquid communicating vessel)的直接控制法获得
控制力矩。
控制力矩的产生的方式:
图 2-1-24
液体连通器:斯伯利系列罗经产生控制力矩的设备是在陀螺仪主轴两端加装液体容器,
内充一定液体,液体可在两个容器之间流动。
当陀螺仪工作,t = t1时,陀螺仪位于 A1处,此时主轴水平指东,θ = 0,两个容器中
的液体数量相等,液体重力mg作用线通过陀螺仪中心O,重力mg不产生力矩。
随着地球自转,当t = t2 时,陀螺仪位于A2处,此时主轴上升了一个θ角( θ ≠0),
低端容器中液体比高端容器中液体多,多余液体的重力mg作用线不通过陀螺仪中心O,力臂不
为零,mg的分力mgsinθ 产生沿水平轴oy 向的重力控制力矩My:
My = 2R2Sρgsinθ
≈2R2Sρg ·θ
= M·θ M = 2RSρg 为最大控制力矩。
液体连通器产生的控制力矩的大小与罗经结构参数和陀螺仪主轴高度角 θ 有关。
控制力矩My沿oy轴的方向将随θ角的方向而定,使主轴进动的速度用 u2表示,
它使陀螺仪主轴负端自动找北(向子午面进动):
u2 = My= M·θ
—————————————————————————————————————————— 5

斯伯利系列罗经,为液体连通器罗经,重力力矩,机械摆式罗经。
(3)阿玛-勃朗系列罗经获得控制力矩的方式
采用电磁摆(electromagnetic pendulum)和水平力矩器(horizontal momentat device)
的间接控制法获得控制力矩。
控制力矩的产生方式:
图 2-1-25
阿玛-勃朗系列罗经的控制设备由电磁摆和位于陀螺球水平轴上的力矩器组成。
当陀螺球工作,t = t1时,若设陀螺球主轴水平指东,θ = 0,电磁摆不输出摆信号,陀
螺球水平轴的力矩器不工作,不向陀螺球施加控制力矩。
随着地球自转,当t = t2时,陀螺球主轴上升了一个角度(θ ≠0),电磁摆输出摆信号,
经水平放大器放大后,送给陀螺球水平轴上的力矩器,力矩器工作,向陀螺球水平轴施加电
磁控制力矩My:
My= Ky ·θ Ky,罗经电控系数,由罗经结构参数决定,如摆信号放大倍数,力矩器的参数等。
控制力矩的大小,与罗经的结构参数和陀螺球主轴的高度角 θ 有关。
罗经的结构参数可以改变,这是此种罗经的一大优点。
控制力矩My 沿oy轴的方向将随θ的方向而定,它使陀螺球主轴正端自动找北(向子午面
进动),主轴进动的速度:
u2 = My
= Ky• θ 阿玛−勃朗系列罗经是通过电磁摆和力矩器获得的电磁控制力矩,电控罗经。
4)陀螺罗经主轴的等幅摆动
—————————————————————————————————————————— 6

通过对自由陀螺仪施加控制力矩制成的陀螺罗经,罗经主轴只具有自动找北的能力而不
能稳定指北,其自动找北的运动轨迹是呈扁平的椭圆轨迹。
这一椭圆运动轨迹的中心位于子午
面内,椭圆的两长半轴相等,两短半轴也
相等,因此椭圆运动轨迹是等幅椭圆。
罗经主轴作等幅椭圆运动(自由摆
动)一周所需要的时间,称为陀螺罗经的
自 由 摆 动 周 期 (period of
free-oscillation)T0。
自由摆动周期T0的大小:
图 2-1-26
T0 =2πH
Mωecosϕ
式中ωe cosϕ为地球自转角速度ωe的水平分量。
陀螺罗经的自由摆动周期与罗经的结构参数(H、M)和纬度有关。
T0等于 84.4min时,称为陀螺罗经的理想自由摆动周期,这时若船舶机动航行,船上的陀
螺罗经将不产生第一类冲击误差。
理想自由摆动周期所对应的纬度称为陀螺罗经的设计纬度(chosen latitude)(ϕ0),设
计纬度是设计罗经时所选取的一特殊纬度。例如安许茨 4型罗经的设计纬度为 60°。
4.使陀螺罗经稳定指北�
1)使陀螺罗经稳定指北的措施
阻尼力矩(damping moment):为了使陀螺罗经稳定指北而对陀螺仪施加的力矩。
阻尼设备(damper))(阻尼器):陀螺罗经产生阻尼力矩的设备(器件)。
阻尼方式(damping mode):陀螺罗经将阻尼力矩施加在陀螺仪(球)的哪一轴上
陀螺罗经的阻尼方式:水平轴阻尼方式(damping mode of horizotal axis)和垂直轴阻
尼方式(damping dode of vertical axis)。
2)陀螺罗经获得阻尼力矩的方法
按产生阻尼力矩的原理不同,分为直接阻尼法和间接阻尼法;
按阻尼力矩的性质不同,分为重力阻尼力矩和电磁阻尼力矩;
—————————————————————————————————————————— 7

按三大系列罗经使用的
阻尼设备不同,分为以下三种
方式:
(1)安许茨系列罗经获得
阻尼力矩的方式
采用液体阻尼器(liquid
damping vessel)的直接阻尼
法产生阻尼力矩的。
阻尼力矩的产生方式:
液体阻尼器由固定在陀
螺球主轴两端的两个相互连
通的液体容器组成,内充一定
数量的高粘度硅油。连通两个
容器的导管很细,使容器内液
体流动滞后于主轴俯仰约四
分 之 一 个 自 由 摆 动 周 期
(T0
4 )。当罗经主轴自动找
北时,主轴的俯仰使两个容器中的
液体数量不相等,多余液体的重力
在陀螺球水平轴产生阻尼力矩,属
于水平轴阻尼方式。阻尼力矩的大
小用下式表示:
MyD = C·χ 式中 C 称为最大阻尼力矩,由罗经
结构参数决定。χ 称为多余液体
角,
阻尼力矩的最大效应导前于
控制力矩的最大效应 90°,也就是
说阻尼力矩使罗经主轴始终向子
午面方向进动,进动速度用u3表示:
图 2-1-28
u3 = MyD
= C• χ 在阻尼力矩的作用下,罗经主轴的方位角 α 和高度角 θ 不断减小,最终使方位角 α 为零,
罗经主轴稳定指北。这种采用液体阻尼器获得阻尼力矩的罗经又称为液体阻尼器罗经。
(2)斯伯利系列罗经获得阻尼力矩的方式
采用在陀螺球(仪)正西侧安放阻尼重物(damping weight)的直接阻尼法产生阻尼力矩。
阻尼力矩的产生方式:
—————————————————————————————————————————— 8

当罗经主轴自动找北时,主轴具有高
度角θ,阻尼重物的重力mg在陀螺球垂直轴
产生重力阻尼力矩MZD,属于垂直轴阻尼方
式。阻尼力矩MZD的大小由下式表示:
图 2-1-29
MZD = MD·θ MZD,最大阻尼力矩,由罗经结构
参数决定。
阻尼重物产生的阻尼力矩使罗经主轴
向水平面方向进动,进动速度用u3表示,
使主轴的高度角θ不断减小,由于主轴的运
动是连续运动,因此在主轴高度角θ不断减
小的同时,主轴的方位角α也随之减小,最
终使主轴偏离子午面一个很小的方位角α稳定指北,u3的大小可由下式表示:
u3= MzD
= MD·θ 这种由阻尼重物获得阻尼力矩的罗经又称为重物阻尼罗经。
(3)阿玛−勃朗系列罗经获得阻尼力矩的方式
采用电磁摆(electromagnetic pendulum)和垂直力矩器(vertical momental device)的
间接阻尼法产生阻尼力矩。
阻尼力矩的产生方式:
阻尼设备由电磁摆和位于陀螺球垂直轴上的垂直力矩器组成。
当罗经主轴自动找北时,主轴有高度角θ,电磁摆输出摆信号,一部分摆信号经垂直放大
器放大后,送到垂直力矩器,垂直力矩器工作,向陀螺球垂直轴施加电磁阻尼力矩MZD,属于
垂直轴阻尼方式。阻尼力矩MZD大小:
MZD = KZ·θ 式中KZ称为阻尼力矩系数,由罗经结构参数决定
电磁摆和垂直力矩器产生的阻尼力矩,使罗经主轴向水平面进动,阻尼力矩使主轴进动
的速度用u3表示,在使主轴高度角θ减小的同时也按比例减了主轴的方位角α,最终使主轴偏
离子午面一个很小的方位角α稳定指北,u3的大小:
u3 = MZD
= KZ·θ 3)陀螺罗经的启动过程
陀螺罗经在控制力矩作用下能够自动找北,在此基础上,在阻尼力矩作用下,经过一定
的时间就能够稳定指北。
陀螺罗经的适用纬度一般为 80°以下,否则罗经指向精度降低或不能正常指向。
(1)阻尼曲线
启动时间:陀螺罗经主轴在控制力矩和阻尼力矩的作用下,由指示任意方向到稳定指北
—————————————————————————————————————————— 9

所需要的时间。
阻尼运动:启动时间内,陀螺罗经主轴的运动,轨迹是一种逆时针收敛螺旋线。
阻尼曲线(damping curve):启动罗经时,由于船舶航向固定不动,记录器记录的航
迹线就是罗经主轴的阻尼运动轨迹。
图 2-1-30
(2)阻尼周期(damping period ,TD)
陀螺罗经主轴作阻尼运动一周所需要的时间:
TD=4πH
4HMωecosϕ-C2
陀螺罗经的阻尼周期的大小与罗经结构参数H、M(Ky)、C(MD或Kz)和纬度有关;
阻尼周期的大小是决定陀螺罗经启动时间的因素之一。
(3)阻尼因数(damping factor, ƒ)
陀螺罗经主轴作阻尼运动时,主轴偏离子午面以东(或以西)的方位角 α 最大值与相继
偏离子午面以西(或以东)的方位角最大值之比:
ƒ=α1
α2 =α2
α3 =……=
αn
αn+1
陀螺罗经阻尼因数 ƒ 的大小由罗经结构参数决定,结构参数一定,其阻尼因数为定值。
各种陀螺罗经的阻尼因数 ƒ 可能不同,一般为 2.5~4。
阻尼因数 ƒ 也是决定陀螺罗经启动时间的因素之一。
(4)启动时间
启动陀螺罗经所需要的时间除了与阻尼周期TD和阻尼因数ƒ有关外,还与启动罗经时其主
轴的初始方位角α0有关。
例题2-1-1:一台安许茨4型陀螺罗经,阻尼因数ƒ为3,纬度40°时的阻尼周期TD为76min,
若开始时主轴的初始方位角α0为 90°,启动这台罗经约需要多长时间(主轴方位角小于 1°
时,可认为稳定指北)。
—————————————————————————————————————————— 10

计算:α1=α0
ƒ =90°3 =30°
α2=α1
ƒ =30°3 =10°
α3=α2
ƒ =10°3 ≈3°.4
α4=α3
ƒ =3°.43
≈1°.2
α5=α4
ƒ =1°.23
≈0°.4
罗经主轴的方位角由 90°减小到 0°.4 一共用了二个半阻尼周期(2.5TD),阻尼时间为 76min
×2.5TD=190min=3h10
m。若再加上罗经开始时约 80min的非周期阻尼时间,这台罗经的启动时
间约为 4h30
m。
罗经启动时间的长短只随船舶所在的纬度和主轴的初始方位角变化。
陀螺罗经都采用启动时减小罗经主轴的初始方位角(和初始高度角),进行快速启动。
二、陀螺罗经的误差
1.纬度误差(latitude error,αrϕ)�
采用垂直轴阻尼法的陀螺罗经,稳定时其主轴不是指向子午面,而是偏离子午面一个方
位角 α。
1)产生纬度误差的原因
罗经采用垂直轴阻尼法,是否产生纬度误差与罗经型号有关。
陀螺罗经稳定指北的条件是主轴视运动的速度V1、V2,控制力矩使主轴进动的速度u2,阻
尼力矩使主轴产生的进动速度u3的矢量和必须为零。当u2 = V2时,要使V1= u3,就必须使主
轴偏离子午面一个α角,否则V1、V2、u2、u3的矢量和不为零,罗经主轴不能稳定指北。
2)纬度误差的大小及变化规律
大小:
αrϕ= MD
M ·tgϕ (液体连通器罗经)
或 αrϕ= Kz
Ky ·tgϕ (电控罗经)
MD
M 或
Kz
Ky 是陀螺罗经阻尼力矩与控制力矩的比值,由罗经结构参数决定。
方向:
北纬时,纬度误差的符号为“偏东”(+)。南纬时,纬度误差的符号为“偏西”(-)。
3)消除纬度误差的方法
(1)外补偿法(out-compensation) 在主罗经上加装纬度误差校正器(corrector of latitude error),通过纬度误差校正器
调整罗经刻度盘示度(或罗经基线),使主罗经航向及分罗经指向不含有纬度误差,而罗经
主轴的指向并不改变。
—————————————————————————————————————————— 11

外补偿法要增加设备,使用烦琐,新式陀螺罗经已很少采用。
(2)内补偿法(into-compensation) ,又称为力矩补偿法
是现代陀螺罗经普遍采用的一种消除纬度误差的方法。
向陀螺球(仪)水平轴或垂直轴施加纬度误差补偿力矩(compensating moment of
latitude error)Myϕ或MZϕ,此补偿力矩的大小、方向及变化规律完全与纬度误差相适应。在
纬度误差补偿力矩的作用下,罗经主轴向子午面进动并稳定指示子午面,纬度误差就被消除
了。
在罗经使用过程中,只要使罗经面板上的纬度旋钮(latitude)指示船位纬度,就消除
了纬度误差。通常情况下,船位纬度变化 5°重调一次旋钮。
2.速度误差(speed error,αrV)�
1)定义
当船舶恒速恒向航行时,船上的陀螺罗经主轴由静止基座(船速为零)时的稳定指北状
态,改变为航速为 V 时的新的稳定指北状态,主轴两种指北状态之间的水平夹角。
2)产生速度误差的原因
陀螺罗经产生速度误差的原因是船舶
恒速恒向的运动。
船舶航速V、航向C,V分解为南北分量
VN 和东西分量VE:
VN= VcosC VE= VsinC
图 2-1-31
当船舶向北(或南)航行时,船速北
向分量VN将使陀螺罗经所在水平面之北半
部分下降(或上升),若把水平面看作静
止不动,船速北向分量VN将使陀螺罗经主轴
相对水平面上升(或下降)。
船舶向东(或西)航向航行时,船速东向分量VE将使陀螺罗经所在水平面之东半部分下
降(或上升),若把水平面看作静止不动,当罗经主轴偏离子午面一个方位角α时,主轴也会
相对水平面的上升或下降。
同样道理,船舶在其他航向航行时,也会引起陀螺罗经主轴相对水平面的上升或下降。
我们把船速使陀螺罗经主轴上升或下降,称为船速引起的罗经主轴的视运动。若把船速引起
罗经主轴的视运动速度用V3表示,V3的大小可由下式表示:
V3 = H·VcosC
Re
式中Re是地球半径,约等于 6370300m。动量矩H为定量,V3 随船速V和航向C变化。
船舶航行时,使罗经主轴运动的速度比无船速时的静止基座V1、V2、u2、u3多出了一个V3,
而罗经主轴稳定指北的条件是V1、V2、u2、u3、V3的矢量和为零。若假设船速为零时罗经主轴
指示子午面(α=0°),则使V1、V2、u2、u3、V3矢量和为零的条件是罗经主轴偏离子午面一
—————————————————————————————————————————— 12

个方位角α,这个方位角α就是陀螺罗经的速度误差αrv(如图 2-1-32 所示)。
3)速度误差的变化规律
(1)大小:
αrv=VcosC
Recosϕ (弧度) 或
αrv = VcosC
5πcosϕ (度)
与船速 V成正比;与纬度 ϕ的余弦成反比;与航向 C 成余
弦规律变化。
航向为 0°或 180°时,速
度误差最大。航向为90°或270
°时,速度误差最小(为零)。
图 2-1-32
图 2-1-33
(2)方向(符号)
由航向 C 决定,当航向
C 在 0°~ 90°和 270°~ 360°范围内时,速度误差
为“偏西”(-)。当航向 C
在 90°~ 180°~ 270°范围
内时,速度误差为“偏东”
(+)(如图2-1-33所示)。
4)消除速度误差的方
法
(1)查表计算法
根据速度误差计算公式αrv=VcosC
5πcosϕ ,编制成速度误差表。
以船舶当时的船速V、纬度ϕ和航向C为引数查速度误差表,查得速度误差αrv,。
例 2-1-3:某船航速 16kn,航向 030°,航行纬度 40°,船上安许茨 4 型罗经的速度误
差为几度?�
查速度误差表:纬度 40°,航速 16kn,航向 030°所对应的速度误差为-1º.1,查得速度
误差αrv后(大小和符号),再根据航向或方位计算公式计算:�
� � � � � � � � � � � � � � � � � � � � � � � TC=GC+αrv� � � � � �
� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � TB=GB+αrv� � � � � � �
(2)校正器外补偿法
(3)内补偿法。
船舶航行时,将罗经面板上的速度旋钮(speed)指示实际船速,就消除了速度误差。
通常情况下,船速变化 5kn 重调一次旋钮。
—————————————————————————————————————————— 13

3.冲击误差(ballistic error,B)� �
1)定义
船舶机动航行(变速变向)时,船舶的机动惯性力作用于罗经,使罗经主轴在船舶机动
过程中和机动终了后的一段时间内偏离其稳定位置而产生的指向误差。
2)分类
(1)第一类冲击误差,BI
机动惯性力作用于陀螺罗经的控制设备而产生的冲击误差。
航行纬度小于设计纬度(ϕ<ϕ0)时,产生偏左的BI;
航行纬度等于设计纬度(ϕ=ϕ0)时,不产生第一类冲击误差BI;
航行纬度高于设计纬度(ϕ>ϕ0)时,产生偏右的BI。
(2)第二类冲击误差,BII
机动惯性力作用于陀螺罗经的阻尼设备而产生的冲击误差。
BII始终偏在稳定位置之右。
3) 冲击误差 B 的大小和方向
第一类冲击误差BI和第二类冲击误差BII是同时产生的。
ϕ<ϕ0,BI和BII一个偏在稳定位置之左,一个偏在稳定位置之右, B = BI−BII;
ϕ=ϕ0,BI等于零, B = BII,冲击误差较小;
ϕ>ϕ0,BI和BII均偏在稳定位置之右, B = BI+BII,冲击误差最大。
陀螺罗经的冲击误差在船舶机动过程中和机动终了后约 1小时经阻尼作用自动消失。
4.摇摆误差(swing error,αrr)� �
1)定义:
船舶在海上航行受风浪的影响而产生摇摆,安装在船上的陀螺罗经就会受船舶摇摆产生
的惯性力的影响而产生指向误差。
2)大小:
αrr=MD
2β20ω4
rsin2C
4Hg2ωecosϕ
式中 D - 是罗经的安装位置到船舶摇摆轴的垂直距离
β0 - 是船舶的最大摇摆角
ωr - 是船舶的摇摆角频率
C - 是船舶的摇摆方位
例题:某船在风浪中航行,航行纬度为 40°,陀螺罗经的结构参数M
H� =2.76×10−2,�
D 为 5m,船舶的 大摇摆角为 15°,摇摆周期为 12s,船舶摇摆方位为 45°,若此船罗经无
消除摇摆误差的措施,此罗经将产生多大的摇摆误差?� � � � � �
� � � � 将以上数值代入摇摆误差公式计算可得:αrr≈ 9º.4�
3)消除:
各种罗经一般都从结构上采取消除摇摆误差的措施,大大提高了陀螺罗经的指向精度。
—————————————————————————————————————————— 14

安许茨系列陀螺罗经将灵敏部分制成双转子陀螺球,当船舶摇摆时,不产生摇摆误差。
斯伯利系列罗经采用在液体连通器内充入高粘度液体的措施,较好地消减了摇摆误差。
阿玛−勃朗系列电控罗经把电磁摆密封在盛
有高粘度硅油的金属容器内,较好地消减了摇摆
误差。
5.其它误差� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �
图 2-1-35
1)基线误差(head marker error)
由于安装罗经时或使用过程中,罗经的基线
(船首线标志)与船首尾线不重合或不平行造成
的。
主罗经的基线误差影响主,分罗经航向精度,
分罗经的基线误差影响分罗经航向精度。
陀螺罗经的基线误差大于 0°.5 就要消除。
调整罗经基线,使其与船首尾线准确重合或
平行,基线误差就消除了。
2)电源不稳定产生的误差
若陀螺罗经电源的电压、电流、频率不稳定,将使罗经陀螺转子的旋转角速度 Ω 变化,
罗经主轴动量矩 H = J·Ω 变化(主轴的转动惯量 J 不变)而偏离稳定位置产生指向误差。
为了防止由于电源不稳定产生的指向误差,陀螺罗经都有自己独立的电源系统。
3)不定误差(variable error)
双转子液体支承的陀螺罗经,由于支承液体浮力不正常或由于陀螺球、随动球不良等原
因,当船舶转向时,陀螺球与随动球之间的摩擦力变大,使罗经产生大小、符号不定的指向
误差。
不定误差轻则影响罗经的指向精度,重则使罗经无法继续使用,且无变化规律可循。
三、陀螺罗经的使用与维护保养
1.安许茨(ANSCHÜTZ)4 型陀螺罗经�
德国 ANSCHÜTZ 公司生产,是安许茨系列罗经的典型型号。
下重式、水平轴阻尼的双转子摆式罗经(two-gyro of pendulous gyrocompass)。
具有结构比较简单、使用寿命长、指向稳定等优点。
1)安许茨 4 型陀螺罗经概述
(1)整机组成
主罗经(master compass):
其灵敏部分具有自动找北和稳定指北功能,
其刻度盘精确指示灵敏部分的指向,便于观测航向
变流机(motor and generator):
变流机将船电转换为罗经所需要的电源;
—————————————————————————————————————————— 15

变压器箱(transformer box):
其电源开关、电磁开关和过电流保护开关控制和保护变流机;
电源变压器产生罗经的单相交流电源。
分罗经接线箱(repeater distribution box):
可分接出 12 个分罗经,并保护其正常工作;
分罗经(repeater)
分为航向分罗经和方位分罗经;
航向分罗经用于观测航向,方位分罗经用于观测航向和方位;
航向记录器(course recorder):
记录航迹向,航行时可以查看过去的航向。
启动罗经时船首向固定不动,记录的航迹向实际上是罗经的阻尼曲线,可以检查罗
经的工作性能。
从航向记录器的分罗经上读取现航向。
图 2-1-36
(2)安许茨 4 型罗经主要技术参数
指向精度(直航): ≤±1°
工作电源:电 压: 三相交流电:110V/330Hz(±3%)
单相交流电:50V/ 50Hz 或 60V/60Hz(±10%)
三相电流: 启动电流: 约 3.5A
—————————————————————————————————————————— 16

工作电流:0.6A~1.2A
陀螺球高度: 高 2mm ±1mm
工作温度: 52°±1°C 液面高度: 4cm~5cm
稳定时间: 约 4h
陀螺球寿命: 20000h(新球 40000 h)
适用纬度: 75°N~75°S (3)安许茨 4 型罗经的工作原理
工作时两个完全相同陀螺转子转速约为 20000 r/min,陀螺球主轴具有较大的动量矩;
陀螺球重心沿垂直轴下移 8mm 产生陀螺球的重力控制力矩。
陀螺球内的液体阻尼器在陀螺球水平轴产生阻力矩。
陀螺球由液体支承、电磁上托线圈定位,具有良好的绕水平轴和绕垂直轴旋转的自由度。
陀螺球主轴在控制力矩和阻尼力矩的作用下,能够自动找北和稳定指北。
通过随动系统,将陀螺球航向精确地传到主罗经刻度盘上,便于观测航向。
通过交流同步传向系统,将主罗经航向精确地传到各个分罗经上,便于观测航向和方位。
电源系统和温控、报警系统保证了整套罗经的正常工作。
(4)安许茨 4 型罗经的主要特点
灵敏部分为双转子陀螺球(two-gyro in the gyrosphere),动量矩指北;
陀螺球由支承液体支承,电磁上托线圈定位;
陀螺球重心下移产生重力控制力矩;
液体阻尼器在陀螺球水平轴产生阻尼力矩,属于水平轴阻尼方式,不产生纬度误差;
由信号电桥产生随动信号,经放大后控制随动系统工作;
采用交流同步传向系统将主罗经航向传到各分罗经,传向精度为 0º.1;
主要误差为速度误差,采用查表计算法消除;
支承液体为蒸馏水、甘油、安息香酸的混合液体,起支承灵敏部分和导电的作用,由温
度控制系统自动保持恒温;
不能进行快速启动,启动时,稳定指北的时间约为 4h。
2)安许茨 4型罗经的主罗经
安许茨 4 型陀螺罗经的主罗经由灵敏部分、随动部分和固定部分组成。
(1)灵敏部分
双转子陀螺球,主罗经的灵敏部分。
0°~360°航向刻度,位于球壳外表面赤道圈上。
5 个石墨导电电极, 3 个陀螺电机的三相电输入电极,分别位于球的顶部(顶电极)、
底部(底电极)、赤道(赤道电极);2个随动电极,分别位于赤道航向刻度的 87°.5 和 272°.5位置。
陀螺球壳,黄铜制成,除电极外其余部分均涂有一层绝缘硬橡胶。
—————————————————————————————————————————— 17

灯形支架,在陀螺球内,与陀螺球壳
固连为一体,
陀螺电机,两个完全相同,通过曲柄
连杆连接,装在灯形支架上,110V/333Hz
的三相交流电,陀螺转子的转速约为 20000
r/min。此结构可以消除船舶摇摆的影响,
不产生摇摆误差。
液体阻尼器,固定在灯形支架的上端,
内有阻尼液体沿陀螺球主轴方向流动。
电磁上托线圈,固定在陀螺球底部,
接通 110V/333HZ的交流电后,陀螺球与随
动球磁场的相互作用力,使陀螺球在随动
球内保持正常位置。
润滑油,陀螺球在制造时充入,通过
棉线将润滑油吸到陀螺转子的轴承上进行
润滑。在放置或移动陀螺球时,切勿将陀
螺球倒置或倾斜超过 45°,以免将润滑油洒到其它器件上,影响陀螺转子轴承的润滑和影响
其他器件的正常工作,减少陀螺球寿命。
图 2-1-37
1-陀螺电机;2-曲柄;3-连杆;4-中心弹簧
密闭陀螺球内充氢气,减少转动部分的摩擦阻力,器件不易氧化和有利于陀螺球散热。
陀螺球正常工作时,与随动球内壁的间隙左右赤道处约为 4mm,上边为 4mm,下边为 8mm。
陀螺球具有自动找北和稳定指北的能力。
(2)随动部分
随动球(out sphere):由上下两个铝质半球组成,外壁全部涂有绝缘硬橡胶,内壁有 5
个与陀螺球外壳电极对应的导电电极,其余部分也都涂有绝缘硬橡胶,底部留有便于支承液
体流动的圆孔,赤道带位置镶有赤道线的有机玻璃块,能够从外部观测陀螺球航向和观测陀
螺球高度。
蛛蛛架(spider leg):随动球上半球固定有 6 根圆杆形黄铜蜘蛛架,作用一是通过它末
端的螺栓、螺帽使上下两个半球组合与拆分,使位于其内的陀螺球能够取出和放入;二是作
为导线沟通随动球内壁 5 个电极与汇电环的电路;三是与中心导杆连接,将随动球吊挂在罗
经桌上。
中心导杆(centre guide bar):下部与 6 根蜘蛛架连接,上部通过轴承固定在罗经桌上,
使随动球能够绕垂直轴自由旋转。
汇电环(collector ring),固定在中心导杆上部,有 6 圈,通过导线与蜘蛛架连通,汇
电环与电刷架上的电刷接触,沟通与罗经桌接线板电路。
方位齿轮(azimuth pinion),与中心导杆上方连接,使中心导杆带动随动球跟踪陀螺球。
还与主罗经刻度盘和航向发送机连接,使主罗经刻度盘与随动球的相对位置始终保
持一致。将陀螺球航向精确地显示在主罗经刻度盘上和复示到各分罗经,同时也消
—————————————————————————————————————————— 18

除了由于船舶转向,支承液体对陀螺球产生的摩擦力,使陀螺球指向精确。
方位电机(reversing motor),驱动方位齿轮。
主罗经刻度盘(compass card) ,指示航向。
(3)固定部分
图 2-1-38
1-啮合凹槽;2-汇电环;3-中心导杆;4-蜘蛛架
5-随动球;6-胶木螺帽
罗经桌(top plate),作用一是作为贮
液缸的缸盖,二是作为安装板,安装有随动
部件、航向同步发送机,控制温控警报系统
的微动开关、温度计、电刷架及接线板、照
明灯及调节旋钮,罗经基线等。由 12 个螺
钉固定在贮液缸上,并留有注液孔。
贮液缸(liquid container),紫铜制
成,内外壁均涂有绝缘硬橡胶,腰部向船尾
方向留有观测陀螺球的玻璃观测窗口和罗
经基线,可以观测陀螺球航向和陀螺球高度
中部外表面设有加热器,通过缸体对缸内液
体加热。通过平衡环和弹簧吊挂在罗经箱体
上,缸的底部有平衡重物。
支承液体 (supporting liquid),
成分比例:
蒸馏水(distilled water): 10 L
甘油(glycerin): 1 L
安息香酸(bencoic acid): 10 g
(国产化学分析纯甘油 20°C时比重为 1.25g/cm3可用 0.9L)
其中甘油是为了增加液体的比重,安息香酸是为了提高液体的导电能力。
作用:
将陀螺球浮起,绕垂直轴和水平轴自由旋转;沟通陀螺球与随动球之间的电路。
航向同步发送机(synchro transmitter),由方位电机通过方位齿轮带动,向各分罗经发
送主罗经航向同步信号,使各分罗经准确复示主罗经航向。
测速电机(measuring rate motor),其转子由方位电机通过方位齿轮带动,当船舶转向
时,其信号绕组产生与船舶转向速率成正比的信号,指示船舶的转向速率。
电风扇(motor with fan),位于罗经箱内底部的中间位置,受微动开关控制,工作时通
过对贮液缸吹风,达到对缸内支承液体冷却的目的。
罗经箱体(binnacle)及电路器件,分为上盖、中部和底座,底座固定在船甲板上,中部
通过固定螺丝固定在底座上,旋松固定螺丝后可以转动,以便消除罗经的基线误差。罗经箱
内的安装板上还分别装有音响报警器、随动开关、放大器件、电子测速器电路板、保险丝、
接线板等。
报警器(alarm),温度报警
3)安许茨 4型罗经的电路原理
—————————————————————————————————————————— 19

(1)电源系统(D.C. or A.C. ships supply)
分为交流船电的电源系统和直流船电的电源系统。
交流船电的电源系统的工作原理框图(交流船电):
图 2-1-39
(2)随动系统(follow-up system) 随动系统由主罗经的随动部分和信号电桥、随动放大器、执行电机(方位电机)组成。
随动系统的工作原理框图:
图 2-1-40
信号电桥自动测量随动球与陀螺球之间的随动信号电压(失配角),随动信号电压的大
小与极性,代表随动球与陀螺球之间失配的程度及失配的方向。随动信号经放大器放大,送
到方位电机,控制方位电机工作。
当随动球与陀螺球相对位置一致(失配角为零)时,随动信号电压为零,方位电机定子
只有激磁磁场而没有控制磁场,方位电机不工作。当随动球与陀螺球相对位置不一致(有失
配角)时,随动信号电压不为零,方位电机的定子既有激磁磁场又有控制磁场,方位电机工
作,通过方位齿轮使随动球、主罗经刻度盘与陀螺球相对位置一致。
(3)传向系统(transmission system)
传向系统由罗经桌上的航向同步发送机、各分罗经和航向记录器中的同步接收机等组成。
其传向原理框图:
图 2-1-41
这种交流供电由同步发送机和同步接收机组成的传向系统称为交流同步传向系统。
船舶改变航向时,方位电机控制随动系统工作的同时也控制航向同步发送机工作,航向
同步发送机通过航向信号绕组的航向信号,使分罗经航向与主罗经航向始终相等。
航向记录器由航向记录装置和时间记录装置组成。航向记录装置又由航向同步接收机、
—————————————————————————————————————————— 20

传动齿轮、记录滚筒、记录笔、记录纸等组成。当船舶航向变化时,航向同步接收机由位于
主罗经桌上的航向同步发送机发送的航向信号控制其转动,经传动齿轮带动记录滚筒转动,
记录滚筒上的记录笔在记录纸上记录下船舶的航迹向。
航向记录器的工作原理框图:
图 2-1-42
航向记录器的作用,可以读取船舶当时的航向,可以查取以前的航向,可以绘制罗经主
轴的阻尼曲线。�
分罗经由同步接收机、传动齿轮、航向匹配装置和分罗经刻度盘组成(如图 2-1-43 所示)。
当船舶航向变化时,航向同步接收机由航向同步发送机发送的航向信号控制其转动,经传动
齿轮带动分罗经刻度盘工作,使分罗经航向与主罗经航向精确同步变化,始终与主罗经航向
相等(误差小于 0°.1)。
图 2-1-43
1-基线;2-粗读刻度盘;3-精读刻度盘;4-航向匹配器;5-同步接收机;6-传动齿轮
—————————————————————————————————————————— 21

交流同步传向系统不能自动消除大于 1°的整度数的分罗经航向误差,启动罗经时必须利
用航向匹配器,调整分罗经航向与主罗经航向相等。
(4)温控报警系统(temperature regulation and warning system)
温控报警系统是由温度控制系统和报警系统组成的。作用是使罗经的支承液体保持恒温
(52°C);当支承液体不能保持恒温,达到 57°C 时报警。
温控报警系统由乙醚管、微动开关、加热器、电风扇和报警器组成。
温控报警系统的工作原理框图:
乙醚管插入贮液缸内的支承液体中,管
内的乙醚对温度非常敏感,其体积随温
度的变化迅速收缩或膨胀,推动管内的
活塞杆上移或下移,控制罗经桌上的微
动开关的触点接通或断开。微动开关有
三对分别控制加热器、电风扇、报警器
的电气触点,电气触点又分别由三对机
械触点控制其接通或断开。
图 2-1-44
启动罗经时,当支承液体温度在 49°C 以下,乙醚管内的乙醚体积小,活塞杆位置低,第
一对机械触点接触使加热器电路接通,加热器工作,对支承液体加热,而第二、第三对机械
触点不接触,电风扇、报警器不工作;当支承液体温度达到 49°C 时,乙醚管内的乙醚体积变
大,推动活塞杆上移使第一对机械触点进一步接触将加热器电路断开,加热器不再对支承液
体加热;
当支承液体温度继续上升达到 52°C 以上时,乙醚管内的乙醚体积更加膨胀变大,进一步
推动活塞杆上移,使第二对机械触点接触,将电风扇电路接通,电风扇工作,对支承液体吹
风降温,而第三对机械触点不接触,报警器不工作。罗经正常工作情况下,电风扇工作将很
快使支承液体温度降回到正常温度,乙醚管活塞杆下移,第二对机械触点脱离接触,电风扇
电路断开,电风扇停止工作。
当由于电风扇发生故障不工作或由于罗经的环境温度太高等原因,支承液体的温度得不
到降温,温度达到 57°C 时,乙醚管内的乙醚体积膨胀到推动活塞杆上移到最高位置,使第三
对机械触点接触,接通报警器电路,报警器发出音响报警。
罗经发出报警后,应立刻对罗经支承液体采取有效降温措施,若温度继续升高到 60°C,应关闭罗经。
4)安许茨 4型罗经的使用与维护保养
� � � (1)使用(实训)�
陀螺罗经作为船舶的指向仪器,指引船舶航行在正确航向上,并用来观测物标的方位进
行定位与避让,确保船舶安全经济地航行。为了保证陀螺罗经的正常工作,使用人员应做好
以下工作。� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �
� ①启动前的检查�
� � � � 在启动罗经前应做好以下检查:�
—————————————————————————————————————————— 22

� � � � a.从罗经桌注液孔测量贮液缸液面高度,液面到注液孔上沿的距离不应大于 4cm~5cm,
否则液体数量不够,应添加液体。�
� � � � b.检查并调整各分罗经航向与主罗经航向相等.�
� � � � c.检查变压器箱上的“电源开关”和主罗经箱上的“随动开关”应放在“Off”位置。�
� � � � d.检查各接线板、插头插座、保险丝应无损坏并接触良好。机械转动部分的转动应正常。�
� � � � e.检查并调整航向记录器的记录笔所在记录纸上的航向等于主罗经航向,时间等于船钟
时间。�
� � � � f.检查主罗经及各分罗经的照明灯及调节应正常,并调节亮度适当。�
②开机�
� � � � a.接通变压器箱上的“电源开关(main�witch)”。� �
� � � � 应做如下检查:三个三相电流指示灯应较亮;从罗经箱观测窗口观察陀螺球应开始缓慢
转动,说明陀螺电机三相电已接通,陀螺球已工作。�
� � � � � b.20min 后,接通主罗经上的“随动开关(follow-up�switch)”。�
应做如下检查:再次检查并调整分罗经航向与主罗经航向相等;约 30min 左右,三相
电流指示灯亮度变暗,其中第一相电流指示灯 亮、第二相电流指示灯亮 暗、第三相电流
指示灯亮度适中,说明三相电流已达到正常值;当支承液体温度达到 52°C,陀螺球稳定指北
时,检查陀螺球高度应符合要求,检查陀螺球高度时罗经桌应水平。�
� ③关机�
a.关闭“随动开关”。�
b.关闭“电源开关”�
(2)使用注意事项
①经常检查罗经的各项参数(三相和单相电压、三相电流、陀螺球高度、支承液体温度、
支承液体液面高度、分罗经航向)均应正常。
②航行中若有速度误差,观测的航向和方位应通过查表计算消除速度误差。
③当报警器报警时,必须对支承液体采取降温措施。当支承液体温度达到 60°C 时,罗经
已不能正常工作,应关闭罗经。
④按要求定期清洁主罗经汇电环、变流机汇电环,保证其接触良好。
⑤对机械转动部分应按要求定期进行清洁并加润滑油,保证其转动灵活。
⑥当罗经不工作时,避免大幅度摇动主罗经,以免因陀螺球不工作而无聚中力,与随动
球碰撞损坏。同样原因,罗经不工作时若船舶摇摆较大,应启动罗经使其工作,避免损坏陀
螺球。
(3)维护保养
安许茨 4 型陀螺罗经除了日常的检查、调整、使用注意事项以外,主要的维护保养工作
有:
—————————————————————————————————————————— 23

� ①拆装主罗经�
当需要更换支承液体,更换陀螺球或清洁陀螺罗球、随动球上的导电电极时,需要拆装
主罗经。拆装主罗经时,应在罗经停止工作至少 1.5h 以后进行;应有 2 人同时操作;拆装前
应准备好所有的专用工具及所需物品;陀螺球不得倒置或倾斜超过 45°;随动球上的 28 号导
电螺钉在拆开随动球之前应先拆出,在装好随动球以后再装回,并用万用电表测量与罗经桌
上对应汇电环的导通应良好;支承液体不能用铁质容器盛放。�
� � � � 拆装主罗经的方法、步骤如下:�
� � � � a.从罗经桌注液孔抽出部分缸内液体,防止从缸内提出随动球时液体溢出。�
� � � � b.拔下罗经桌上的两根电缆插头和加热器电线插头,对称旋下固定罗经桌的 12 个螺丝,
将其中三个旋进另外三个孔内,将罗经桌顶起脱离贮液缸。�
� � � � c.2 人同时用手握住罗经桌上的提手,向上提起罗经桌,当随动球底部离开液面时停留一
会,并用细木棍从随动球底部圆孔往上顶起随动球内的陀螺球,使球内液体完全流出到缸内。�
� � � � d.将罗经桌连同随动球等一起提离贮液缸,放到专用三脚支架上。�
� � � � e.在随动球下方放好陀螺球的专用托盘,将位于随动球赤道部位下半球的 28 号导电螺钉
拆出,一人用手托住随动球下半球,另一人对称旋下蜘蛛架末端的 6 个螺母,使随动球下半
球连同陀螺球一起下落到托盘上并将托盘移出。�
� � � � f.用干净绸布轻轻擦拭陀螺球和随动球导电部分,并用蒸馏水冲洗,切不可用砂纸打磨。
新式陀螺球表面不得用酒精等擦拭,以免损害所涂的保护膜。清洁以后不得再用手触摸。�
� � � � g.按照与拆开时的相反步骤装好主罗经。�
②更换支承液体
支承液体应每年更换一次,若发现支承液体已变质,应及时更换。
更换支承液体的方法、步骤如下:�
� � � � a..将贮液缸内的旧液体清除,并用蒸馏水冲洗干净。�
� � � � b.用量杯量取 5L(也可适当多量几杯)蒸馏水倒入贮液缸内。�
� � � � c.用量杯量取 1L 甘油倒入贮液缸内,再用量杯量取 3L 蒸馏水冲洗量杯后倒入贮液缸内。�
� � � � d.用量杯量取 1L 蒸馏水放在量杯内,用天平称出 10g 安息香酸(也可用 18g 硼砂代替)
放在烧杯内,倒入约 100mL 蒸馏水,放在酒精灯或电炉上加热到安息香酸完全溶解后,倒入
贮液缸内。用量杯内剩余的蒸馏水冲洗烧杯倒入贮液缸内, 后再用量杯量取 1L 蒸馏水倒入
贮液缸内。�
� � � � e.用玻璃棒充分搅拌贮液缸内的液体,将其搅拌均 后,用 1L 的大量杯盛满一杯,放入
比重计,测量支承液体的比重应符合要求。待主罗经桌装好后,再将盛出的液体从贮液孔注
入到贮液缸内,直到缸内液体数量符合要求,剩余部分装在塑料瓶内备用。
支承液体的比重可根据温度查“支承液体比重曲线图”。�
—————————————————————————————————————————— 24

③陀螺罗经的检测与调整
a.主罗经三相电流的检测与调整
主罗经三相电流的大小,由罗经箱上的三个电流指示灯的亮度表示。�
三个电流指示灯灯座上两电极的电压应为 0.9V~ 1.65V,三相电流为 0.6A~ 1.1A。�
� � � � 支承液体的导电率调整调整方法:加入 1g 安息香酸(或 2g 硼砂),三相电流增加 0.1A。
若三相电流超过正常值,应先从贮液缸内抽出液体,再加入蒸馏水与甘油按比例配成的同数
量液体。�
b.陀螺球高度的检测与调整
条件:支承液体温度正常,陀螺球稳定指北和罗经桌水平。�
用手电筒照明,从主罗经观测窗观测陀螺罗球高度,首先使眼睛看随动球赤道带玻璃上
的两条水平标志线重合为一条线后,再看陀螺球赤道线,应高 2mm±1mm,否则为不正常。�
陀螺球高度不正常是支承液体的比重不符合要求引起的,向支承液体内加入甘油或蒸馏
水。�
c.微动开关的检查与调整
微动开关三个触点工作的温度,与温度表指示的支承液体温度不一致时,应进行调整。�
有一个或二个触点不正常时,通过调整不正常机械触点的下接触螺钉与上接触点之间的
间隙,使其工作正常;�
三个触点工作的温度都不正常时,应调整微动开关的弹簧调节螺钉,改变三个机械触点
之间的间隙,使其工作正常。�
2.安许茨标准 20 型陀螺罗经(ANSCHÜTZ�gyrocompass�STANDARD� � 20)
1)安许茨标准 20 型陀螺罗经概述
RAYTHEON ANSCHÜTZ 公司生产。
主罗经,由灵敏部分(陀螺球)、陀螺球航向测量部分和航向显示、电子器件、支承液
体、罗经箱体等固定部分组成。灵敏部分具有自动找北和稳定指北的功能;陀螺球航向测量
部分采用数码检测技术,精确测量陀螺球的航向信号,经放大处理后,以数字方式显示主罗
经航向,并经分配箱将主罗经航向信号传送给各分罗经;固定部分保证了灵敏部分和航向测
量显示部分能够正常工作。
控制箱与整套罗经的各部分连接,控制各部分的工作,如将主罗经航向信号分配给各分
罗经等。
航向打印机可以根据需要打印航向数据等。
标准磁罗经除了正常指向外,还通过航向传感器将磁罗经航向显示在分罗经上。
陀螺罗经操纵箱可进行陀罗航向与磁罗经航向转换,消除陀罗经差和磁罗经差。
警报器具有航向偏差、支承液体温度不正常等报警。
分罗经分为数字型和刻度盘型,自动与主罗经保持同步,与主罗经航向误差小于 0°.1。
2)安许茨标准 20 型陀螺罗经的主要特点
—————————————————————————————————————————— 25

(1)采用数字电路检测与处理陀螺球航向信号,提高了主罗经航向的可靠性与精度。
(2)航向信号为数字信号,主、分罗经航向均可以采用数字方式显示,直观、易读取。
(3)分罗经航向可以自动与主罗经航向保持同步。
(4)由 CPU 检测和控制主罗经工作状态参数。
(5)体积小型化。
(6)可以从显示的航向数据中消除速度误差。
(7)罗经液体分为支承液体和蒸馏水两种液体,分装两处。延长了支承液体的使用寿命。
3)安许茨标准 20 型陀螺罗经使用
图 2-1-48
(1)启动
启 动 简 单 , 只 需 将 电 源 箱 上 ( 或 船 电 ) 的
D.C.24V 电源接通,整套罗经便会自动完成全部启
动过程。
启动过程中的信号如下:
电源接通后,加热器加热,数字监视器显示支
承液温度,数字前符号 h 表示支承液体处于加热;
温度 45°C,随动系统自动接通,数字监视器显
示船舶航向,但数字后跟一个亮点,表示罗经还没
有稳定指北;
约 3h 后,亮点小消失,罗经(陀螺球)已基本稳定指北(误差小于 2°);
约 5h 后,罗经(陀螺球)完全稳定指北,显示的航向达到技术指标精度。
(2)注意事项
①使用过程中,数字监视器显示航向的小亮点若闪烁表示罗经工作不正常。
②支承液体一般为 3 年更换一次,更换时应先将液体温度提高到 22°C 以上。
③加液体时应先将蒸馏水加入带有红色标志的孔中,后加支承液体,以免沾染蒸馏水。
④检查维护汇电环时,避免免汇电环受压变形。
⑤突然短时间断电,将 dip 开关的 B11 的 C 开关打到 off 位置,再按下 B14,然后将 B11
的 C 开关打回到 on 位置,这样当恢复供电后仍能正常指北。
3.斯伯利 37 型陀螺罗经(SPERRY� � MK37)� �
斯伯利 37 型陀螺罗经是美国 SPERRY 公司生产的斯伯利系列罗经之一,斯伯利系列罗经
的典型型号,是目前商船上使用较多的一种罗经。
1)斯伯利 37 型陀螺罗经概述
(1)整机组成及主要作用
主罗经(master compass):灵敏部分自动找北并能稳定指北,刻度盘上读取航向;
电子控制器(electronic control unit):将船电转换为罗经所需要的三相交流电源、放
大随动信号、进行快速启动罗经。
航向发送器(transmission unit):向分罗经分配航向信号并保护其正常工作,可 12 个;
速纬误差校正器箱(speed and latitude compensator unit):消除纬度与速度误差;
—————————————————————————————————————————— 26

分罗经(repeater):分航向分罗经和方位分罗经,用于方便地读取航向和方位。
(2)主要技术数据
直航时指向误差小于±0°.5;
工作电源为 115V/400Hz 的三相交流电和 70V(或 35V)的直流电;
主罗经正常工作环境温度−5°C ~+45°C 范围内;
适用航速为 0 ~40 kn;
适用纬度为 80°N ∼ 80°S;
正常启动约需 4h 稳定指北,快速启动约 1.5h 稳定指北;
陀螺球寿命为 20000h。
(3)主要特点
①灵敏部分的主要器件是单转子陀螺球,其动量矩指南。
②灵敏部分由液体支承(硅油),轴承限定陀螺球位置。
③控制设备为液体连通器,内充高粘度的硅油,产生重力控制力矩。
④采用重物阻尼器(30g),在陀螺球垂直轴产生重力阻尼力矩,存在纬度误差。
⑤随动变压器产生随动信号。
⑥采用直流步进传向,光电发送器发送航向信号。
⑦主要误差为纬度误差和速度误差,采用内补偿法消除。
⑧采用静止逆变器产生罗经三相交流电源。
⑨可以快速启动罗经,约 1.5h 稳定指北。
⑩罗经工作时支承液体不需保持恒温,只起支承作用而不起导电作用。
2)主罗经
(1)灵敏部分:单转子陀螺球(gyrosphere)和垂直环(vertical ring)。
陀螺球:密封有陀螺电机,转速 12000。
阻尼重物:球壳西侧,约 30g,陀螺主轴具有高度角时,在陀螺球垂直轴产生阻尼力
矩。
随动变压器衔铁:球壳西侧长方型凹槽内,与垂直环上的“E”型铁心和绕组部分构成
随动变压器(又称“E”变压器)。
三个自由度:
陀螺球的上下垂直轴与垂直环上的轴承连接,陀螺球可绕垂直轴自由转动。
垂直环的轴与叉形随动环上的轴承连接,陀螺球垂直环一起可绕水平轴自由转动。
陀螺球和垂直环由液体(硅油)支承,罗经正常工作时处于中性悬浮状态。
液体连通器:垂直环的陀螺球主轴正负端方向,呈圆柱形,陀螺球主轴具有高度角时,
液体连通器低端容器内的多余液体对陀螺球产生控制力矩。
随动变压器的“E”型铁心和绕组:在垂直环的西侧。
校正速、纬误差的力矩器:在垂直环的东侧。
当陀螺球内的陀螺电机正常工作时,陀螺球具有较大的动量矩 H,在控制力矩的作用下
其主轴负端能够自动找北,在阻尼力矩的作用下能够稳定指北。
(2)随动部分
—————————————————————————————————————————— 27

叉型随动环 (phantom yoke) :下部水平轴与垂直环连接,上端轴与支承板上的轴承
连接,使叉型随动环被吊挂在支承板上,被方位电机通过方位齿轮驱动,可绕垂直
轴自由旋转,跟踪并始终与陀螺球相对位置保持一致。
主罗经刻度盘:方位电机驱动叉型随动环的同时,还通过方位齿轮驱动刻度盘,使其
指向与陀螺球指向精确相等(误差小于 0°.1)。
汇电环:联通固定部分与灵敏部分的陀螺电机电路和随动变压器电路。
图 2-1-49
1-方位电机;2-随动变压器;3-陀螺球;4-垂直环
5-叉形随动环;6-方位齿轮;7-支承板 ;8-余弦解算器 (3)固定部分
罗经箱体:相当于贮液缸,除了箱体外,整个主罗经全部置于罗经箱内的硅油(silicone
oil)中;箱体完全密封,船首线位置装有有机玻璃窗口,读取主罗经航向。
支承板:上吊挂叉形随动环外,装有主罗经刻度盘、方位电机、方位齿轮、光电发送
器、余弦解算器等。
光电发送器(photoelectric transmitter):向各分罗经发送主罗经航向信号,将主罗
经航向传到各分罗经。
余弦解算器(synchro resolver)
照明灯(exciter lamp)等
3)斯伯利 37 型罗经的电路原理
电源系统:
静止逆变器将交流船电转换为 115V/400Hz 的三相交流电。
变压整流部分将交流船电转换为 D.C.70V(或 D.C.35V)电源,作为传向系统工作电源。
—————————————————————————————————————————— 28

随动系统:启动罗经时,船舶不动即叉形随动环开始时不动,陀螺球自动找北时,陀螺
球的衔铁与垂直环上的“E”形铁心上绕组的相对位置失配,绕组即可产生随动信号;或当陀
螺球稳定指北时船舶转向,垂直环上的“E”形铁心上的绕组与陀螺球上衔铁的位置失配,绕
组也产生随动信号。随动变压器产生的随动信号经晶体管放大后,控制方位电机工作。方位
电机驱动主罗经的随动部分跟踪并始终与陀螺球相对位置保持一致。
传向系统:光电发送器由方位电机通过方位齿轮驱动,产生主罗经航向(也就是陀螺球
航向)的同步信号,控制传向系统控制电路的工作,控制电路又控制分罗经步进电机的工作,
步进电机通过分罗经传动齿轮,驱动分罗经刻度盘始终保持与主罗经相同的航向(误差小于1
6
度)。
斯伯利 37 型罗经 5 种工作方式的控制电路:
①旋转方式(slew mode):控制电路使陀螺电机不工作而随动系统工作,人为调整陀螺
球主轴近似指向真北(罗航向近似等于真航向),达到快速启动罗经的目的。
②启动方式(start mode):控制电路使陀螺电机工作而随动系统不工作,是陀螺电机
转速的加速过程,约 10in 达到正常转速。
③自动校平方式(automatic level mode):控制电路使随动系统工作,向陀螺球垂直
轴施加校平力矩,使陀螺球主轴趋向水平,达到快速启动罗经的目的。
④运转方式(run mode):控制电路使罗经全部进入启动时的正常工作状态,快速启动
时约 1.5h 可稳定指北。
⑤运转/旋转方式(run/slew mode):陀螺电机和随动系统正常工作时,控制电路使陀
螺球和主罗经航向可调,使其罗航向近似等于真航向,达到快速启动罗经的目的。5 种工作
方式的转换由电子控制器箱上的“工作转换开关”转换。
速、纬误差校正电路:纬度旋钮、速度旋钮和余弦解算器解算的误差校正信号,控制力
矩器向陀螺球垂直轴施加误差校正力矩,使陀螺球主轴指示真北,纬度误差和速度误差就被
消除了。
4)斯伯利 37 型罗经的使用与注意
(1)快速启动罗经的方法、步骤
①接通电子控制器箱上的电源开关(power)。�
②将工作方式转换开关指示“旋转(slew�mode)”位置。�
③根据主罗经刻度盘航向与真航向不一致的情况,将电子控制器箱上的旋转开关扳向
“顺时针(CW)”或“逆时针(CCW)”,使主罗经刻度盘航向近似等于真航向。�
④将工作方式转换开关指示“启动(start� mode)”位置,等待约 10min,使陀螺电
机转速达到正常转速。�
⑤将工作方式转换开关指示“自动校平(automatic�level�mode)位置,等待约 10s,
使陀螺球主轴自动校平。�
⑥将工作方式转换开关指示“运转(run�mode)位置,罗经进入正常启动状态,约 1.5h
—————————————————————————————————————————— 29

可稳定指北。�
⑦接通航向发送器箱上的分罗经电源开关和分罗经开关,并核对分罗经航向是否与主罗
经航向相等,若不相等,应调整分罗经航向与主罗经航向相等。�
⑧将速、纬误差校正器箱上的速度旋钮(speed)指示“航行速度”,将纬度旋钮(latitude)
指示与“船位纬度”相应的位置(北纬 N 或南纬 S)。�
(2)关闭罗经
①将电子控制器箱上的工作转换开关指示“切断(off)”位置。�
②将航向发送器箱上的分罗经开关和分罗经电源开关指示“切断(off)”位置。�
③将电子控制器箱上的电源开关指示“切断(off)”位置。
(3)使用注意
①启动罗经时,当陀螺电机已经工作,可将电子控制器箱上的工作转换开关直接指示“运
转/旋转(run\slew mode)”位置,使用旋转开关使主罗经刻度盘航向近似等于真航向后,
再将工作转换开关指示“运转(run mode)即可。
②速、纬误差校正器箱上的速度旋钮和纬度旋钮,当航速变化 5kn 时重调一次,纬度变
化 5°时重调一次,并注意北纬、南纬开关的转换。
③启动罗经时,陀螺电机转速达到正常时应使锁紧手柄“解琐(uncage),关闭罗经时,
在切断电子控制器箱上的电源开关前应先将锁紧手柄“锁紧(caged)”。
④按罗经使用说明书的规定和要求对整机进行检查和维护保养,保证罗经正常工作。
� 4.阿玛−勃朗 10 型(ARMA−BROWN� � MK10)陀螺罗经�
美国 ARMA 公司和英国 BROWN 公司联合研制生产的电磁控制式系列陀螺罗经之一,是阿玛
−勃朗系列的典型型号。
1)阿玛−勃朗 10 型陀螺罗经概述
(1)整机组成
主罗经(master compass):灵敏部分能自动找北并稳定指北,刻度盘指示主罗经航向;
变流机(motor and generator:将船电转换为罗经工作电源;
开关接线箱(switch junction box):控制保护变流机和控制分罗经工作;
分配箱(distribution box):两个,向各分罗经分配主罗经航向信号,可接 20 个;
分罗经(repeater):直流步进式接收机,能够方便地读取船舶航向和测量物标方位;
警报器(alarm):是当罗经电源发生故障时,以音响和灯光形式报警。
(2)主要技术数据
在恒速恒向航行条件下,其指向误差小于±0°.75;
罗经工作电源为 26V/400Hz 的三相交流电和 35V 直流电;
主罗经正常工作的环境温度为 0 ~55°C;
适用纬度为 80°N ~80°S;
适用航速为 0 ~60kn;
快速启动时,若陀螺球主轴偏北小于 10°,约 40min 可稳定指北(误差小于±0°.5)。
—————————————————————————————————————————— 30

一般启动时间不超过 6h;
陀螺球寿命约 40000h;
最多可以带 20 个分罗经。
(3)主要特点
①灵敏部分的主要部件为单转子陀螺球,动量矩指北。
②灵敏部分由液体(氟油)支承,扭丝确保陀螺球在贮液缸的正常工作位置。
③电磁摆和水平力矩器产生电磁控制力矩。
④电磁摆和垂直力矩器在陀螺球垂直轴产生电磁阻尼力矩,存在纬度误差。
⑤电磁铁和陀螺球位置敏感线圈产生随动信号。
⑥随动系统包括方位随动系统和倾斜随动系统。
⑦采用直流步进传向,传向精度为1
6度。
⑧主要存在纬度误差和速度误差,均采用内补偿法消除。
⑨随动球与贮液缸合二为一,一般称为贮液缸。
⑩快速启动时,一般约 40min 可稳定指北。
2)阿玛−勃朗 10 型罗经的主罗经
阿玛−勃朗 10 型罗经的主罗经由灵敏部分、随动部分和固定部分组成。
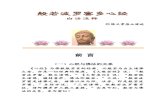
(1)灵敏部分
1-柔软银质导线;2-垂直扭丝;3-浮动平衡环;4-陀螺电机;5-水平轴;6-水平扭丝
7-柔软银质导线;8-垂直轴;9-陀螺球;10-陀螺转子飞轮;11-陀螺球位置敏感线圈
12-电磁铁;13-贮液缸;14-东边支架
陀螺球:哑铃状密封球体,紫铜空心。球内陀螺电机转速 12000r/min,动量矩指北。转
子两端飞轮(flywheel),以增大转子的转动惯量。球内充入氢气(hydrogen),以利于散热和
防锈。
浮动平衡环:(gimbal ring)在陀螺球壳中间凹槽位置,其平面与陀螺电机转子轴相垂直。
—————————————————————————————————————————— 31

纽丝:(torsion fibre)
水平扭丝,直径约 0.3mm,铍青铜丝,在浮动平衡环与陀螺球东、西边的支架上。
作用为:
①作为无摩擦轴承,产生陀螺球的水平轴。
②通过浮动平衡环内定陀螺球的左右位置。
③起水平力矩器的作用。
垂直扭丝, 直径为 0.15mm,铍青铜丝,浮动平衡环上下与贮液缸内壁垂直方向。
其作用为:
①作为无摩擦轴承,产生陀螺球的垂直轴。
②通过浮动平衡环,内定陀螺球上下的中心位置。
③起垂直力矩器的作用。
陀螺球支承方式:采用液浮和扭丝组合支承。
氟碳润滑剂贮液缸内充入高比重的氟油(fluorcarbon lubricant),整个灵敏部分全部
位于氟油中,在正常工作温度时,于中性悬浮状态。金属扭丝对陀螺球不起悬吊作用。
三个自由度的实现:
电磁铁(electromagnetic),两块,陀螺球内侧主轴方向两端,与位于贮液缸内侧南北轴
方向的两个陀螺球位置敏感线圈(sensitive coil),组成随动信号测量装置。
陀螺电机和电磁铁的电源由贮液缸通过绕在扭丝上的柔软银丝输入。
(2)随动部分
—————————————————————————————————————————— 32

图 2-1-53 图 2-1-54
1-刻度盘;2-贮液缸;3-方位平衡环;4-倾斜随动电机;5-粘性阻尼器
6-1:1 同步齿轮;7-航向发送器;8-方位随动电机;9-粘性阻尼器
10-余弦解算器;11-同步齿轮;12-可调小齿轮;13-方位齿轮
14-可调齿侧间隙小齿轮;15-扇形倾斜齿轮;16-倾斜平衡环
随动部分由贮液缸、倾斜平衡环、倾斜随动电机、方位平衡环、方位随动电机、刻度盘、
汇电环等组成(如图 2-1-53所示)。
贮液缸:呈灯形,通过其南北轴支承在倾斜平衡环上,倾斜平衡环的东西轴支承在方位
平衡环上,使贮液缸可绕南北轴运动。所以贮液缸的南北轴可以绕东西轴作俯仰运动。
贮液缸主要作用:
一是起支承液体容器的作用;
二是跟踪并保持与陀螺球相对位置一致,读取航向;贮液缸西侧的电磁摆,间接检测
陀螺球主轴的高度角产生摆信号;启动时使陀螺球主轴近似指示真北和水平,
快速启动罗经;
三是对陀螺球施加水平力矩和垂直力矩。
倾斜平衡环(tilt gimbal ring):由倾斜随动电机(tilt motor)通过倾斜齿轮驱动,带
动贮液缸工作。
方位平衡环(azimuth gimbal ring):由方位随动电机(azimuth motor)通过方位齿轮驱
—————————————————————————————————————————— 33

动,带动贮液缸工作,同时带动固定在方位平衡环上端的主罗经刻度盘,使刻度盘的“0”度
始终与陀螺球主轴方向完全一致。
汇电环:方位平衡环下端垂直轴方向,其上的电刷向随动部分和灵敏部分供电
固定部分:支承方位平衡环的下垂直轴,使贮液缸、倾斜平衡环、方位平衡环和刻度盘
一起绕垂直轴转动。
(3)固定部分
罗经箱体:由底座、中部箱体和顶盖组成,中部箱体和顶盖可以拆装。
操作面板:如图所示。设主罗经电源开关(power)、旋转速率旋钮(slew rate)、
方位按钮(azimuth)、倾斜按扭(tilt)、速度旋钮(speed)、纬度旋钮(latitude)和
照明旋钮(illumination)。
航向步进发送器:其转子由方位随动电机通过方位齿轮驱动,信号绕组产生的主罗经航
向信号,控制分罗经步进接收机工作,使分罗经复示主罗经航向;
余弦解算器:其转子也是由方位随动电机通过方位齿轮驱动,信号绕组产生的航向信号
控制速度误差力矩器,产生与航向成余弦规律变化的校正力矩;
电子器件:一块底板和六块插接电路板,分别用来产生稳定的直流电源、放大随动信号、
控制随动系统工作、控制电磁摆信号、控制传向系统工作等。
3)电路原理
(1)电源系统
电源系统为变流机形式,由三相异步电动机同轴带动一台三相交流发电机组成。
供 380V/50Hz 或 440V/60Hz 的三相船电,发 26V/400Hz 的三相交流电作为罗经工作电源。
变流机由开关接线箱上的变流机开关(generator)和箱内的保险丝控制和保护其工作。
传向系统所需的 D.C.35V 电源是由船电经变压器变压和整流电路整流后得到的。
(2)随动系统
随动系统由电磁铁和陀螺球位置敏感线圈(包括倾斜敏感线圈和方位敏感线圈)、倾斜
随动放大器和方位随动放大器、倾斜随动电机和方位随动电机等组成。
倾斜随动系统的随动原理框图和方位随动系统的随动原理框图如图所示。
—————————————————————————————————————————— 34

电磁摆产生的摆信号:控制随动系统,使贮液缸在倾斜上和方位上分别产生位移,水平
扭丝和垂直扭丝受扭,产生沿陀螺球水平轴向的控制力矩和沿陀螺球垂直轴向的阻尼力矩;
旋转速率旋钮、方位按钮、倾斜按钮及电路产生的旋转速率信号:启动罗经时,控制随
动系统,通过贮液缸使陀螺球主轴水平和主轴近似指示真北,进行快速启动罗经;
纬度旋钮及电路产生的纬度误差校正信号:控制倾斜随动系统,使贮液缸在倾斜上产生
位移,使水平扭丝受扭,产生沿陀螺球水平轴向的纬度误差校正力矩,消除纬度误差;
速度旋钮及电路产生的速度误差校正信号:控制方位随动系统,使贮液缸在方位上产生
位移,使垂直扭丝受扭,产生沿陀螺球垂直轴向的速度误差校正力矩,消除速度误差;
有关电路产生的倾斜偏压信号:控制倾斜随动系统,使贮液缸在倾斜上产生位移,使水
平扭丝受扭,产生沿陀螺球水平轴向的附加控制力矩,用以补偿陀螺球沿其主轴存在某一固
定的不平衡所引起的作用于水平轴向的干扰力矩,以使陀螺球能恰如其分地补偿地球自转角
速度ω2的影响;
有关电路产生的温度补偿信号:控制倾斜随动系统,使贮液缸在倾斜上产生位移,使水
平扭丝受扭,产生沿陀螺球水平轴向的补偿力矩,消除由于支承液体的温度变化(正常工作
时约在 25°C ∼ 85°C 之间变化)而使灵敏部分的重心、浮心和中心不重合引起的干扰力矩的
影响。
以上各种信号均输入各随动系统的放大器,经放大后控制随动系统工作。
(3)传向系统
采用直流步进传向系统;
由航向步进发送器(sted-by-sted transmitter)、控制电路(controlling circuit)和直
流步进接收机(D.C. sted-by-sted motor)(分罗经)组成。
—————————————————————————————————————————— 35

传向系统的工作原理框图如图所示。
(4)附属电路
稳压电路作用:一是为随动系统放大电路提供稳定的 D.C.40V 电压,二是为压降保护电
路提供 D.C.55V 工作电压。
压降保护电路作用:在罗经刚启动时,陀螺电机转速低,压降保护电路自动控制随动系
统不投入工作。大约 10min 钟后,陀螺电机转速正常,压降保护电路便使随动系统自动地投
入工作,使罗经自动地找北指北。压降保护电路对罗经起到保护的作用。
摆信号控制电路作用:对输入到倾斜随动系统和方位随动系统的摆信号的大小进行控制。
启动罗经时,摆信号控制电路使其处于强阻尼状态,陀螺球主轴能够很快稳定指北。当罗经
稳定指北后,摆信号控制电路使其处于弱阻尼状态(正常阻尼状态),使水平扭丝和垂直扭
丝对陀螺球施加较小的控制力矩和阻尼力矩,保证了罗经指向精度高。
4)阿玛−勃朗 10 型罗经的使用与注意事项
(1)快速启动的方法、步骤
①接通开关接线箱上的变流机开关(generator)。�
② 校 对 所 有 分 罗 经 航 向 与 主 罗 经 航 向 相 等 后 , 接 通 开 关 接 线 箱 上 的 分 罗 经 开 关
(repeater)。�
③接通主罗经面板上的电源开关(power)。�
等待约 10min,当随动系统工作后。�
④用手按下方位按钮(azimuth),转动旋转速率旋钮(slew� rate),使主罗经刻度盘
转动,直到航向近似为真航向为止。�
� � � � ⑤用手按下倾斜按钮(tilt),转到旋转速率旋钮(slew�rate),使贮液缸上的水平气泡
位于中间位置。�
⑥将速度旋钮(speed)指示“航行速度”。�
⑦将纬度旋钮(latitude)指示与船位纬度相应位置(北纬 N 或南纬 S)。�
⑧需要时调节主罗经照明旋钮(illumination),使主罗经航向照明合适。�
(2)关机
①切断主罗经电源开关(off)。�
②切断分罗经开关(off)。�
③切断变流机开关(off)。�
(3)使用注意事项
①尽量采用快速启动,以延长扭丝使用寿命。
—————————————————————————————————————————— 36

②罗经修理后启动时,在接通主电源的瞬间,贮液缸指北端向西“突跳”,说明陀螺电
机转向正确,否则陀螺电机转向错误,罗经不能正常工作。
③启动罗经时,当使用旋转速率旋钮改变主罗经航向或改变贮液缸水平状态时,在松开
方位按钮或倾斜按钮前应将旋转速率旋钮先旋回到中间的“0”位置后,再松开按钮。
④启动罗经时,若按下方位按钮,顺时针转动旋转速率旋钮则航向增加,逆时针转动旋
转速率旋钮则航向减小;若按下倾斜按钮,顺时针转动旋转速率旋钮则贮液缸北端下倾,逆
时针转动旋转速率旋钮则贮液缸北端上升。
⑤启动罗经调整贮液缸水平时,应慢慢转动旋转速率旋钮,使贮液缸慢慢变化,切不可
快速,以防贮液缸倾倒。
⑥航行中尽量避免罗经断电,若不得不断电时,应尽量保持航向,以免扭丝过度受扭而
断掉。
⑦按使用说明书的规定和要求进行检查、维护保养。
—————————————————————————————————————————— 37