Carnegie Mellon Zoë Vehicle Controller Design Design Review December 19, 2003 Michael Wagner...
17
Carnegie Mellon Zoë Vehicle Controller Design Design Review December 19, 2003 Michael Wagner ([email protected])
-
Upload
timothy-neal -
Category
Documents
-
view
215 -
download
0
Transcript of Carnegie Mellon Zoë Vehicle Controller Design Design Review December 19, 2003 Michael Wagner...

Carnegie Mellon
Zoë Vehicle Controller Design
Design Review
December 19, 2003
Michael Wagner ([email protected])

Carnegie Mellon
Aspects of Controller Design
Chassis redesign
Evaluate Hyperion controller design in terms of:
Changing algorithms, exposing variables
Ease of use
Power consumption of hardware
Integrating instrument deployment
Reliability for multi-day operation

Carnegie Mellon
Chassis Redesign
Tu
rn R
ad
ius
2 passive steering pivots2 roll pivots
Kinematics similar to Hyperion

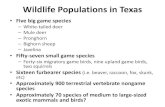
Carnegie Mellon
How to Control It?
Initial tests show that the chassis naturally tends towards an incorrect configuration
not…

Carnegie Mellon
Controller Performance
Robot stopped, axles both
angled to the right
Front wheel over block
Rear wheel over block

Carnegie Mellon
Controller Performance
Robotstopped
Front wheel over block
Rear wheel over block

Carnegie Mellon
Controller Architecture
PIController
GalilMotion
ControllerRobot
KinematicModel
VehicleController,
Pendant
d
vd
inner,front
++
ticks/s
a
+Erad+
–
–
+ +
+
a
c
PID
= Kp(d – a) + KI (d – a)
outer,front
outer,rear
inner,rear
PIController
++
ticks/s+
E
rad
+
–
–
+
+
+

Carnegie Mellon
Slip Control
Idea is to control slip ratio [Yoshida03]
s = r – v / r
Slip ratio should be small to travel over terrains
Slip ratio of 1 means the wheels are just spinning on the soil
Must reliably measure both and v
Angular wheel velocity is easy to measure with encoders
Rover velocity is trickier without GPS

Carnegie Mellon
Instrument Controllers
Software blocks to interface with the science “instruments”:
SPI cameras
Spectrometer
Fluorescence camera
SPI pan/tilt
Underbelly deployment mechanism
Each component must:
Reliably carry out command
Know when failures occur, report this to executive

Carnegie Mellon
Instrument Controllers
Blocks must be split up to allow complex science operations, for instance:
Stop robot
Deploy fluorescence imager to (x0,z0)
Take fluorescence image
Move robot ahead by y0 (NOTE: how do we check that this is safe?)
Take fluorescence image

Carnegie Mellon
Control Hardware
Several instrument controllers must interface with motion control hardware
8 axes to control:
4 drive motors (w/o sinusoidal commutation)
2 SPI pan/tilt motors
2 underbelly deployment mechanism (x / z)
But also some simpler motions that may not require sophisticated control hardware
Plow deployment
Calibration target deployment
Shroud deployment
Filter wheels, dust covers, …

Carnegie Mellon
Next Steps
Test Hyperion’s motion controller with Zoe amplifiers and drive motors
Tune steering controllers for rough terrain
Analyze failure modes
See if control / power performance is as expected
Improve reliability of Vehicle Controller process• Handle “odd” motion controller conditions (amps, limit switches, etc.)
• Instrument more variables for State Observer and Health Monitor
Implement chassis self-calibration

Carnegie Mellon
Next Steps
Prototype instrument controllers:
Pan/tilt
Underbelly deployment (in conjunction with safe driving)
Design “control” for simple actions (shroud, plow, etc.)

Carnegie Mellon
That’s it
Muchas gracias
¿Preguntas?

Carnegie Mellon
Goals of Redesigned Chassis
Support science payload under chassis
Create overlapping fields of view
Support “recover maneuver” to autonomously back out of non-traversable regions
Provide maneuverability to approach targets in the morning within panorama from Sol N-1

Carnegie Mellon
Double Passive-Steered Chassis
MetricMetric Double Passive-SteeredDouble Passive-Steered
Mechanical Complexity Extra complexity to couple steering motions.
Turning Radius Much tighter turning radii possible.
Controller Modifications Modifications required to vehicle controller.
Stability Less stable in tight turns.
Expected Mass Extra mass required for steering motion coupler.
Expected Power Draw Smaller stresses on frame should reduce power draw.
Ease of Science Instrument Integration No fixed rear axle to attach science instruments.
Dead Reckoning Accuracy Less wheel slip should provide better information about vehicle state.
Symmetry of Fwd and Reverse Driving Motion should be symmetric
Failure Modes Hard stops needed to avoid collapse.

Carnegie Mellon
Controller Performance
Robotstopped
Front wheel over block
Rear wheel over block