CANYVAL-X - svs.gsfc.nasa.gov · Mission Description Project Status Virtual Telescope Inertial...
2
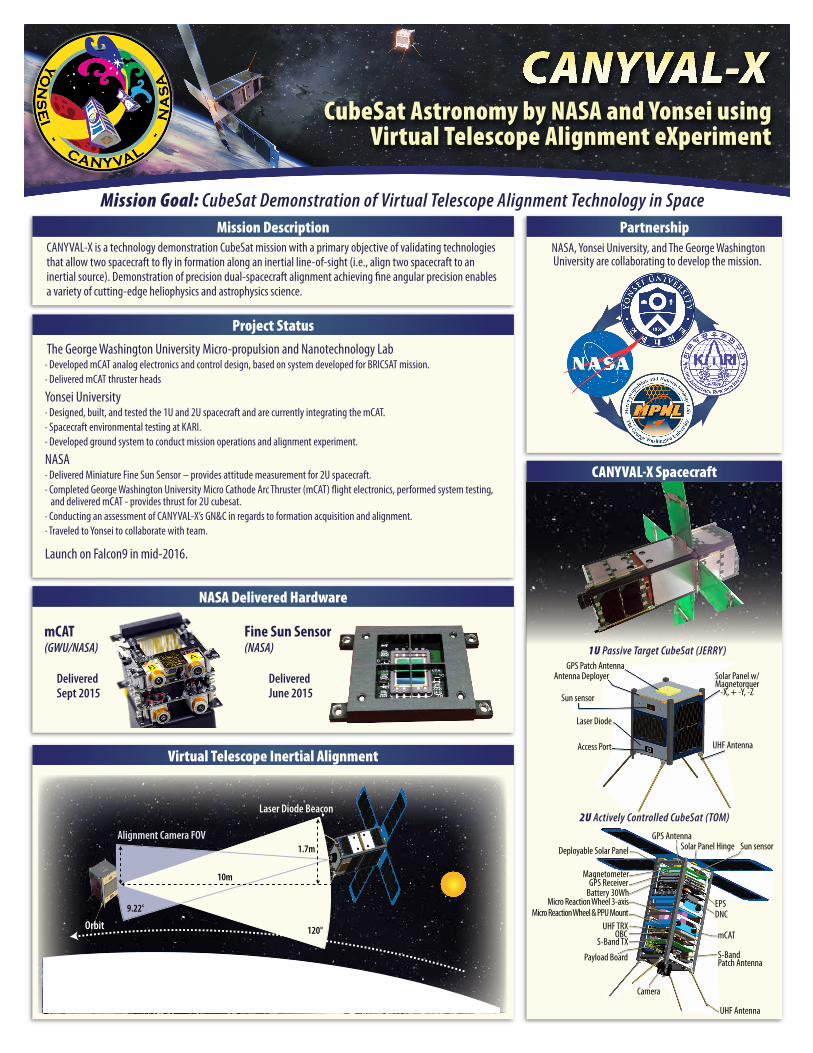
Mission Description Project Status Virtual Telescope Inertial Alignment CANYVAL-X is a technology demonstration CubeSat mission with a primary objective of validating technologies that allow two spacecraft to fly in formation along an inertial line-of-sight (i.e., align two spacecraft to an inertial source). Demonstration of precision dual-spacecraft alignment achieving fine angular precision enables a variety of cutting-edge heliophysics and astrophysics science. The George Washington University Micro-propulsion and Nanotechnology Lab · Developed mCAT analog electronics and control design, based on system developed for BRICSAT mission. · Delivered mCAT thruster heads Yonsei University · Designed, built, and tested the 1U and 2U spacecraft and are currently integrating the mCAT. · Spacecraft environmental testing at KARI. · Developed ground system to conduct mission operations and alignment experiment. NASA · Delivered Miniature Fine Sun Sensor – provides attitude measurement for 2U spacecraft. · Completed George Washington University Micro Cathode Arc Thruster (mCAT) flight electronics, performed system testing, and delivered mCAT - provides thrust for 2U cubesat. · Conducting an assessment of CANYVAL-X’s GN&C in regards to formation acquisition and alignment. · Traveled to Yonsei to collaborate with team. Launch on Falcon9 in mid-2016. Mission Goal: CubeSat Demonstration of Virtual Telescope Alignment Technology in Space 1U Passive Target CubeSat (JERRY) CubeSat Astronomy by NASA and Yonsei using Virtual Telescope Alignment eXperiment 9.22° 120° 10m 1.7m Alignment Camera FOV Orbit Laser Diode Beacon GPS Patch Antenna Solar Panel w/ Magnetorquer -X, + -Y, -Z UHF Antenna Antenna Deployer Sun sensor Laser Diode Access Port NASA Delivered Hardware Fine Sun Sensor mCAT (GWU/NASA) (NASA) Delivered Sept 2015 Delivered June 2015 Partnership 2U Actively Controlled CubeSat (TOM) Deployable Solar Panel Magnetometer GPS Receiver Battery 30Wh Micro Reaction Wheel 3-axis Micro Reaction Wheel & PPU Mount UHF TRX OBC S-Band TX Payload Board Camera UHF Antenna S-Band Patch Antenna mCAT DNC EPS Sun sensor GPS Antenna Solar Panel Hinge NASA, Yonsei University, and The George Washington University are collaborating to develop the mission. CANYVAL-X Spacecraft
Transcript of CANYVAL-X - svs.gsfc.nasa.gov · Mission Description Project Status Virtual Telescope Inertial...
Mission Description
Project Status
Virtual Telescope Inertial Alignment
CANYVAL-X is a technology demonstration CubeSat mission with a primary objective of validating technologies that allow two spacecraft to fly in formation along an inertial line-of-sight (i.e., align two spacecraft to an inertial source). Demonstration of precision dual-spacecraft alignment achieving fine angular precision enables a variety of cutting-edge heliophysics and astrophysics science.
The George Washington University Micro-propulsion and Nanotechnology Lab · Developed mCAT analog electronics and control design, based on system developed for BRICSAT mission. · Delivered mCAT thruster heads
Yonsei University · Designed, built, and tested the 1U and 2U spacecraft and are currently integrating the mCAT.· Spacecraft environmental testing at KARI. · Developed ground system to conduct mission operations and alignment experiment.
NASA · Delivered Miniature Fine Sun Sensor – provides attitude measurement for 2U spacecraft.· Completed George Washington University Micro Cathode Arc Thruster (mCAT) flight electronics, performed system testing, and delivered mCAT - provides thrust for 2U cubesat.· Conducting an assessment of CANYVAL-X’s GN&C in regards to formation acquisition and alignment.· Traveled to Yonsei to collaborate with team.
Launch on Falcon9 in mid-2016.
Mission Goal: CubeSat Demonstration of Virtual Telescope Alignment Technology in Space
1U Passive Target CubeSat (JERRY)
CubeSat Astronomy by NASA and Yonsei usingVirtual Telescope Alignment eXperiment
9.22°
120°
10m
1.7mAlignment Camera FOV
Orbit
Laser Diode Beacon
Deployable Solar Panel
MagnetometerGPS Receiver
Battery 30WhMicro Reaction Wheel 3-axis
Micro Reaction Wheel & PPU MountUHF TRX
OBCS-Band TX
Payload Board
Camera
UHF Antenna
S-BandPatch Antenna
mCAT
DNCEPS
Sun sensor
GPS Patch AntennaSolar Panel w/Magnetorquer
-X, + -Y, -Z
UHF Antenna
Antenna Deployer
Sun sensor
Laser Diode
Access Port
GPS AntennaSolar Panel Hinge
NASA Delivered Hardware
Fine Sun SensormCAT(GWU/NASA) (NASA)
DeliveredSept 2015
DeliveredJune 2015
CANYVAL-X
Partnership
2U Actively Controlled CubeSat (TOM)
Deployable Solar Panel
MagnetometerGPS Receiver
Battery 30WhMicro Reaction Wheel 3-axis
Micro Reaction Wheel & PPU MountUHF TRX
OBCS-Band TX
Payload Board
Camera
UHF Antenna
S-BandPatch Antenna
mCAT
DNCEPS
Sun sensor
GPS Patch AntennaSolar Panel w/Magnetorquer
-X, + -Y, -Z
UHF Antenna
Antenna Deployer
Sun sensor
Laser Diode
Access Port
GPS AntennaSolar Panel Hinge
NASA, Yonsei University, and The George Washington University are collaborating to develop the mission.
CANYVAL-X Spacecraft
CubeSat Astronomy by NASA and Yonsei usingVirtual Telescope Alignment eXperiment
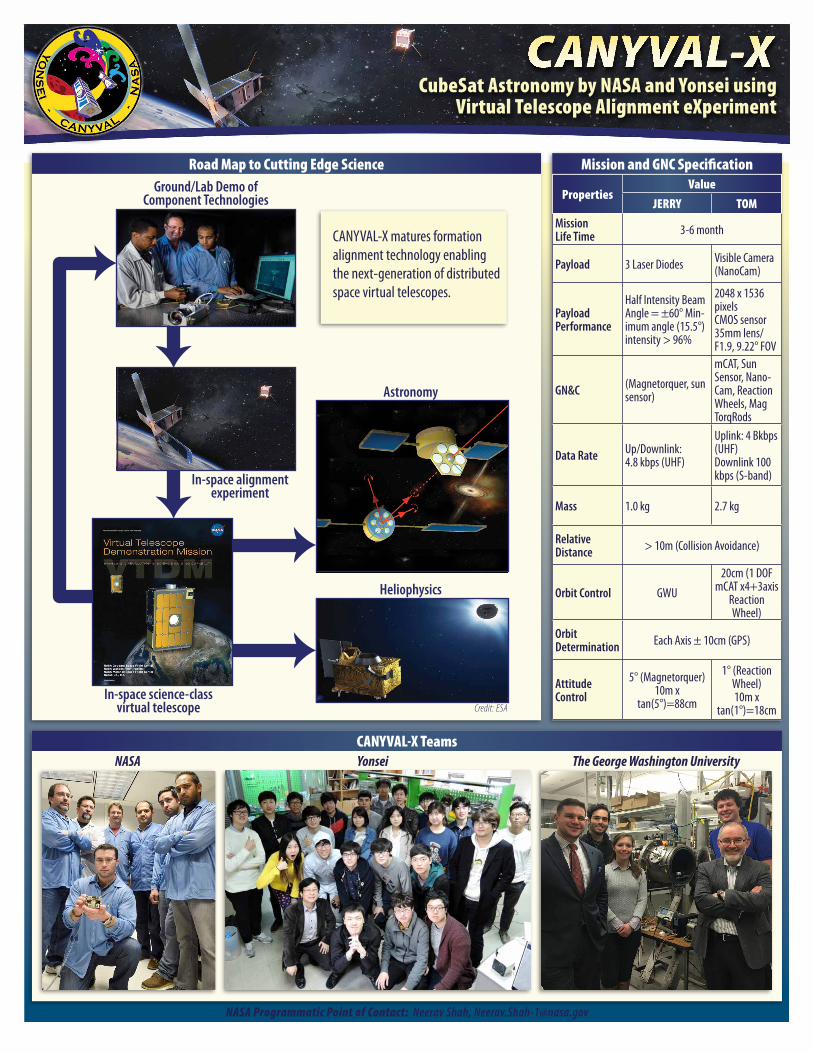
CANYVAL-X Teams
Road Map to Cutting Edge Science
CANYVAL-X
Ground/Lab Demo of Component Technologies
In-space alignment experiment
In-space science-class virtual telescope
Astronomy
Heliophysics
CANYVAL-X matures formation alignment technology enabling the next-generation of distributed space virtual telescopes.
Mission and GNC Specification
PropertiesValue
JERRY TOMMissionLife Time 3-6 month
Payload 3 Laser Diodes Visible Camera (NanoCam)
PayloadPerformance
Half Intensity Beam Angle = ±60° Min-imum angle (15.5°) intensity > 96%
2048 x 1536 pixels CMOS sensor35mm lens/F1.9, 9.22° FOV
GN&C (Magnetorquer, sun sensor)
mCAT, Sun Sensor, Nano-Cam, Reaction Wheels, Mag TorqRods
Data Rate Up/Downlink: 4.8 kbps (UHF)
Uplink: 4 Bkbps (UHF)Downlink 100 kbps (S-band)
Mass 1.0 kg 2.7 kg
Relative Distance > 10m (Collision Avoidance)
Orbit Control GWU
20cm (1 DOF mCAT x4+3axis
Reaction Wheel)
OrbitDetermination Each Axis ± 10cm (GPS)
Attitude Control
5° (Magnetorquer)10m x
tan(5°)=88cm
1° (Reaction Wheel)10m x
tan(1°)=18cm
NASA Programmatic Point of Contact: Neerav Shah, [email protected]
Credit: ESA
NASA Yonsei The George Washington University


















