
P ath-Following A utonomous C onvoy with M ultiple A synchronous N odes

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
CANVAS CONNECTED and
AUTONOMOUS
NETWORKED
VEHICLES for
ACTIVE
SAFETY

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
CANVAS Autonomous Vehicle Platform

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
CANVAS Research & Student Engagement
Research Faculty & Grad/Undergrad Students
Educa,on & Student Engagement CAV Related Courses CAV Prac:cal Training CAV Students’ Club
CAV Interna:onal Compe::ons

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
CONNECTED & AUTONOMOUS NETWORKD VEHICLES for ACTIVE SAFETY

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
CANVAS Autonomous Vehicle: Sensing
Lidars
Cameras
Radars

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
Autonomous Vehicle: Architecture
Sensing Decision
Simultaneous Localiza6on & Mapping
Percep6on
Communica6on V2V / V2I
Autonomous

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
canvas RESEARCH: Mapping, Localization & Multimodal sensing
SEAMLESSLY INTEGRATING MOBILITY, SAFETY & SECURITY IN AUTONOMOUS & CONNECTED VEHICLES
CONNECTED & AUTONOMOUS NETWORKED VEHICLES FOR ACTIVE SAFETY
n multi-modality sensingSignal sensing from multiple lidars, radars & cameras
n sensor & data fusionIntra- & inter-modality fusion of sensed signals
n (joint) deep learningObject detection, recognition & motion forecast using deep learning
n internal sensingHuman-vehicle interaction & human sensing
research focus:
regular image
thermal image
face alignment
head pose estimation
eye gaze estimation
expression recognition
body tracking
wearable sensor
voice recognition
angry
afraid
surprised
happy
sad
disgusted
inference
Thermal Image
Regular Image

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
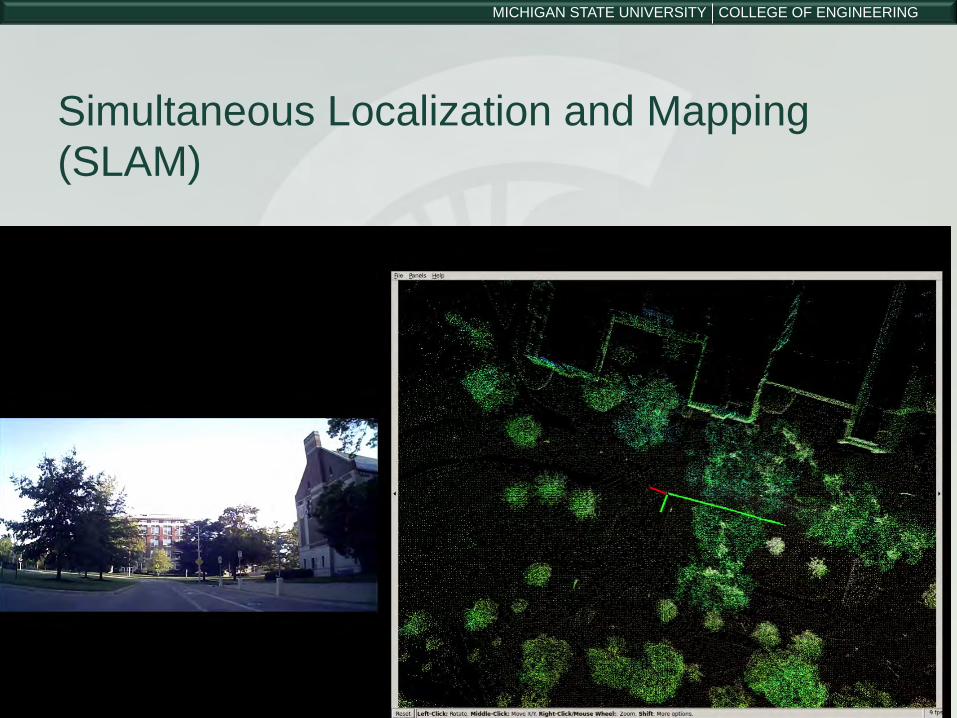
Simultaneous Localization and Mapping (SLAM)

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
Autonomous Driving on Snow

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
CANVAS Object Detection & Classification in Snowy Conditions

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
Autonomous Vehicle: Perception Piece of the CANVAS “mind”
Sigmoid
FC
Euclidean
Loss2
AveragePool
DepthConcat
Conv
Conv
Conv
Conv
Conv
Maxpool
Conv
DepthConcat
Conv
Conv
Conv
Conv
Conv
MaxPool
Conv
MaxPool
DepthConcat
Conv
Conv
Conv
Conv
Conv
Maxpool
Conv
DepthConcat
Conv
Conv
Conv
Conv
Conv
MaxPool
Conv
DepthConcat
Conv
Conv
Conv
Conv
Conv
Maxpool
Conv
DepthConcat
Conv
Conv
Conv
Conv
Conv
Maxpool
Conv
DepthConcat
Conv
Conv
Conv
Conv
Conv
MaxPool
Conv
MaxPool
DepthConcat
Conv
Conv
Conv
Conv
Conv
Maxpool
Conv
DepthConcat
Conv
Conv
Conv
Conv
Conv
MaxPool
Conv
MaxPool
DepthConcat
Conv
Conv
LocalRespNorm
MaxPool
Conv
Input
Sigmoid
FC
Euclidean
Loss1
AveragePool
FC
Sigmoid
FC
Euclidean
Loss0
AveragePool
FC
Example of a Deep Neural Network

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
Sensor Fusion (Lidar + Radar)

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
Sensor Fusion (Lidar + Video)
§ Automatic fusion of Lidar + images § Generating dense depth maps that can be used to
training deep neural network § Defining deep learning architecture, and training
and testing it
Smart interpolated depth Lidar + Image

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
canvas RESEARCH: RADAR
Antenna RF IC
Radar Sensor packaging
Radar Fusion, Learning, Classifica6on intra-‐ and inter-‐sensor data
Radar System radar arrays
EMI/ EMC
Simula6on &
Modeling Other sensing
modali6es

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
CANVAS Advanced Radar Research
§ CANVAS Radar Research Objectives § Detection and classification of
pedestrians, vehicles, animals, etc… § Classification of people and activities
§ Approach § Leverage micro-motion signatures
present in Doppler radar § Further develop interferometric radar
mode developed by MSU faculty § Research distributed radar systems
for advanced detection and classification
Simulated radar micro-Doppler signature of a walking person, showing distinct time-frequency signatures
Joint 30 GHz interferometer/Doppler measurements of a walking person

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
canvas RESEARCH: deep learning Pedestrian Detection
17
MSU Video: SDS on 30 classes Caltech Test Video: SDS R-CNN

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
canvas RESEARCH FOCUS: deep learning

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
Situational Awareness: Overview Observe
Act Understand
An6cipate
• Multi-sensor system (LIDAR+camera) • Car Detection and Localization • Human Detection and Localization • Identifying Types of Pedestrians/Objects • Forecasting Human-Car Dynamics • Forecasting Human-Human Dynamics • Take Preemptive Actions • Collision avoidance

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
Situational Awareness: Simulating the World In Closing
Simulating The World...
Figure 1.1: Top row: A number of example renders from the large database of 3D CADmodels available on the online database turbosquid.com. Bottom Row: Renders frommodels of similar objects found in the free Trimble 3D Warehouse. The models found inturbosquid enable much higher quality rendering. By using a high end rendering softwareand accurate models one can create a large amount of photo-realistic renders that can beused to trained object detectors.
1.2.3 Ontological Supervision for Fine Grained Classification of StreetView Storefronts
Modern search engines receive large numbers of business related, local aware queries,such as “Mexican Restaurants in Pittsburgh”, “Laundromats around me open now”, etc.These queries are best answered using accurate, up-to-date, business listings, that containrepresentations of business categories. Creating such listings is a challenging, and neverending, task as businesses often change hands or close down. For businesses with streetside locations one can leverage the abundance of street level imagery, such as GoogleStreet View, to automate the process. However, while data is abundant, labeled data is not;the limiting factor is creation of large scale labeled training data.
In this work, we utilize an ontology of geographical concepts to automatically prop-agate business category information and create a large, multi label, training data for finegrained storefront classification. We match street level imagery to known business in-formation using both location and textual data extracted from images. We fuse infor-mation from the ontology to propagate category information such that each image ispaired with labels with different levels of granularity. Our learner, which is based onthe GoogLeNet/inception deep convolutional network architecture and classifies 208 cat-egories, achieves human level accuracy.
7
Figure 1.2: A fully rendered scene. To our knowledge, we are the first to utilize this levelof realism in synthetic data generation.
1.3 Broad Impact
There are a number of ways in which this work will impact the broad computer visioncommunity: (1) The output of our classification method can be used as the first step in afully automated solution for object-model matching, which is a fundamental operation inmany computer vision, graphics, and robotics applications. In graphics, it can be usedfor photo-manipulation – inserting new objects into images, and manipulating currentones [Kholgade et al., 2014]. In computer vision, it will aide 3D reasoning of scenesand augmented reality, while in robotics it can be used for robot manipulation. (2) Byemploying rendered images of 3D models, and automatically assigning labels, a limitingtask in computer vision, that of collecting large labeled datasets, is effectively eliminated.The use of 3D CAD model databases for computer vision will enable tasks such as imageclassification, object detection, pedestrian tracking, and human pose estimation.
Moreover, we feel that insights gained from the work done in this thesis go beyond theuse of 3D CAD models, and are applicable to the broad computer vision community. Themain takeaway is that for constructing training sets, a computer vision researcher needsto be a true Renaissance Woman, employing skills not only of a machine learning hacker,but also those of natural language analysis, human computer interaction, library studies,behavioral economics, and even philosophy. There is a lot of high quality informationthat has already been curated, or created, by people using significant amounts of labor. Byvisually-grounding our tasks to the physical world we are able to leverage these knowledgesources.
8
Figure 3.6: Example results from all of the datasets used. Each row shows input images(top) and overlaid pose estimation results (bottom). (a) Results using a Known 3D model,(b) results using an Unknown 3D model, and (c) failure cases.
31
Y. Movshovitz-Attias, V.N. Boddeti, Z. Wei and Y. Sheikh, 3D Pose-by-Detection of Vehicles via Discriminatively Reduced
Ensembles of Correlation Filters, BMVC 2014
Vishnu Boddeti (CMU) Situational Awareness February 26, 2016 50 / 1

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
V2V & I2V: Sensor Fusion

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
canvas RESEARCH: V2X sensor fusion
SEAMLESSLY INTEGRATING MOBILITY, SAFETY & SECURITY IN AUTONOMOUS & CONNECTED VEHICLES
CONNECTED & AUTONOMOUS NETWORKED VEHICLES FOR ACTIVE SAFETY
n multi-modality sensingSignal sensing from multiple lidars, radars & cameras
n sensor & data fusionIntra- & inter-modality fusion of sensed signals
n (joint) deep learningObject detection, recognition & motion forecast using deep learning
n internal sensingHuman-vehicle interaction & human sensing
research focus:
regular image
thermal image
face alignment
head pose estimation
eye gaze estimation
expression recognition
body tracking
wearable sensor
voice recognition
angry
afraid
surprised
happy
sad
disgusted
inference

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
canvas RESEARCH: internal sensing
SEAMLESSLY INTEGRATING MOBILITY, SAFETY & SECURITY IN AUTONOMOUS & CONNECTED VEHICLES
CONNECTED & AUTONOMOUS NETWORKED VEHICLES FOR ACTIVE SAFETY
n multi-modality sensingSignal sensing from multiple lidars, radars & cameras
n sensor & data fusionIntra- & inter-modality fusion of sensed signals
n (joint) deep learningObject detection, recognition & motion forecast using deep learning
n internal sensingHuman-vehicle interaction & human sensing
research focus:
regular image
thermal image
face alignment
head pose estimation
eye gaze estimation
expression recognition
body tracking
wearable sensor
voice recognition
angry
afraid
surprised
happy
sad
disgusted
inference

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
CANVAS Education & Student Engagement
Research Faculty & Grad/Undergrad Students
Educa,on & Student Engagement CAV Related Courses CAV Prac:cal Training CAV Students’ Club
CAV Interna:onal Compe::ons

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
CANVAS Education & Student Engagement Examples of CANVAS related courses/areas
§ Deep Learning, Machine Learning & AI • Theoretical and practical algorithmic-oriented courses
§ Robotics for CAVs • Statistical signal processing & autonomous systems
§ Computer Vision and Image Processing • Both in CSE and ECE
§ Radars and Antennas • Advanced EM theory & radar-dedicated courses
§ Control, Communications and Networking • Distributed and non-linear control and wireless
communications and networking

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
CANVAS Education & Student Engagement CANVAS Students’ Club & Practical Training

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
CANVAS Education & Student Engagement CANVAS Students’ Club
§ Attracted ~ 50 undergraduate students § Breakdown by class
§ Senior 52% § Junior 27% § Soph. 12%
§ Breakdown by major § Elect. & Comp. Eng. 45% § Comp. Sci. & Eng. 36% § Mech. Eng. 9%

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
CANVAS Education & Student Engagement NHTSA Enhanced Safety Vehicle (ESV) Competition

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
CANVAS Education & Student Engagement Examples of CANVAS related areas

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
CANVAS Education & Student Engagement SAE/GM AutoDrive Challenge MSU is one of only six US universi6es selected

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING

MICHIGAN STATE UNIVERSITY COLLEGE OF ENGINEERING
Thank You!
canvas.msu.edu


















