CSCE643: Computer Vision Bayesian Tracking & Particle Filtering Jinxiang Chai
Camera Calibration & Stereo Reconstruction Jinxiang Chai.
49
Camera Calibration & Stereo Reconstruction Jinxiang Chai
-
Upload
ella-newman -
Category
Documents
-
view
223 -
download
2
Transcript of Camera Calibration & Stereo Reconstruction Jinxiang Chai.

Camera Calibration & Stereo Reconstruction
Jinxiang Chai

3D Computer Vision
The main goal here is to reconstruct geometry of 3D worlds.

How can we estimate the camera parameters?
- Where is the camera located?- Which direction is the camera looking at?- Focal length, projection center, aspect ratio?

Stereo reconstruction
Given two or more images of the same scene or object, compute a representation of its shape
How can we estimate camera parameters?
knownknowncameracamera
viewpointsviewpoints

Camera calibration
Augmented pin-hole camera - focal point, orientation
- focal length, aspect ratio, center, lens distortion
Known 3DKnown 3D
Classical calibration - 3D 2D
- correspondence
Camera calibration online resources

Camera and calibration target

Classical camera calibration
Known 3D coordinates and 2D coordinates - known 3D points on calibration targets
- find corresponding 2D points in image using feature detection
algorithm

Camera parameters
u0
v0
100-sy0
sx аuv1
Perspective proj. View trans.Viewport proj.
Known 3D coords and 2D coordsKnown 3D coords and 2D coords

Camera parameters
u0
v0
100-sy0
sx аuv1
Perspective proj. View trans.Viewport proj.
Known 3D coords and 2D coordsKnown 3D coords and 2D coords
Intrinsic camera parameters (5 parameters)
extrinsic camera parameters (6 parameters)

Camera matrix
Fold intrinsic calibration matrix K and extrinsic pose parameters (R,t) together into acamera matrix
M = K [R | t ]
(put 1 in lower r.h. corner for 11 d.o.f.)

Camera matrix calibration
Directly estimate 11 unknowns in the M matrix using known 3D points (Xi,Yi,Zi) and measured feature positions (ui,vi)

Camera matrix calibration
Linear regression:• Bring denominator over, solve set of (over-determined) linear
equations. How?

Camera matrix calibration
Linear regression:• Bring denominator over, solve set of (over-determined) linear
equations. How?
• Least squares (pseudo-inverse) - 11 unknowns (up to scale) - 2 equations per point (homogeneous coordinates) - 6 points are sufficient

Nonlinear camera calibration
Perspective projection:
1100
0
1 3
2
1
3
2
1
0
0
i
i
i
T
T
T
y
x
i
i
z
y
x
t
t
t
r
r
r
vf
uf
v
u

Nonlinear camera calibration
Perspective projection:
1100
0
1 3
2
1
3
2
1
0
0
i
i
i
T
T
T
y
x
i
i
z
y
x
t
t
t
r
r
r
vf
uf
v
u
K R T P

Nonlinear camera calibration
Perspective projection:
2D coordinates are just a nonlinear function of its 3D coordinates and camera parameters:
1100
0
1 3
2
1
3
2
1
0
0
i
i
i
T
T
T
y
x
i
i
z
y
x
t
t
t
r
r
r
vf
uf
v
u
K R T P
33
32302
33
30213021
)(
)(
tPr
ttfPrvrfv
tPr
tuttfPrurrfu
T
yTT
yi
Tx
TTTx
i

Nonlinear camera calibration
Perspective projection:
2D coordinates are just a nonlinear function of its 3D coordinates and camera parameters:
1100
0
1 3
2
1
3
2
1
0
0
i
i
i
T
T
T
y
x
i
i
z
y
x
t
t
t
r
r
r
vf
uf
v
u
33
32302
33
30213021
)(
)(
tPr
ttfPrvrfv
tPr
tuttfPrurrfu
T
yTT
yi
Tx
TTTx
i
K
);,,( iPTRKf
);,,( iPTRKg
R T P

Multiple calibration images
Find camera parameters which satisfy the constraints from M images, N points: for j=1,…,M
for i=1,…,N
This can be formulated as a nonlinear optimization problem:
);,,(
);,,(
ijjji
ijjji
PTRKgv
PTRKfu
M
j
N
iijj
jiijj
ji PTRKgvPTRKfu
1 1
22 ));,,(());,,((

Multiple calibration images
Find camera parameters which satisfy the constraints from M images, N points: for j=1,…,M for i=1,…,N
This can be formulated as a nonlinear optimization problem:
);,,(
);,,(
ijjji
ijjji
PTRKgv
PTRKfu
M
j
N
iijj
jiijj
ji PTRKgvPTRKfu
1 1
22 ));,,(());,,((
Solve the optimization using nonlinear optimization techniques:
- Gauss-newton
- Levenberg-Marquardt

Nonlinear approach
Advantages:• can solve for more than one camera pose at a time
• fewer degrees of freedom than linear approach
• Standard technique in photogrammetry, computer vision, computer graphics
- [Tsai 87] also estimates lens distortions (freeware @ CMU)http://www.cs.cmu.edu/afs/cs/project/cil/ftp/html/v-source.html
Disadvantages:• more complex update rules
• need a good initialization (recover K [R | t] from M)

How can we estimate the camera parameters?

Application: camera calibration for sports video
[Farin et. Al]
images Court model

Stereo matching
Given two or more images of the same scene or object as well as their camera parameters, how to compute a representation of its shape?
What are some possible representations for shapes?• depth maps
• volumetric models
• 3D surface models
• planar (or offset) layers

Outline
Stereo matching - Traditional stereo
- Active stereo
Volumetric stereo - Visual hull
- Voxel coloring
- Space carving

Stereo matching• 11.1, 11.2,.11.3,11.5 in Sezliski book
• D. Scharstein and R. Szeliski. A taxonomy and evaluation of dense two-frame stereo correspondence algorithms.International Journal of Computer Vision, 47(1/2/3):7-42, April-June 2002.
Readings

Stereo
scene pointscene point
optical centeroptical center
image planeimage plane

Stereo
Basic Principle: Triangulation• Gives reconstruction as intersection of two rays• Requires
> calibration
> point correspondence

Stereo correspondence
Determine Pixel Correspondence• Pairs of points that correspond to same scene point
Epipolar Constraint• Reduces correspondence problem to 1D search along conjugate
epipolar lines• Java demo: http://www.ai.sri.com/~luong/research/Meta3DViewer/EpipolarGeo.html
epipolar lineepipolar lineepipolar lineepipolar lineepipolar plane

Stereo image rectification

Stereo image rectification
• reproject image planes onto a commonplane parallel to the line between optical centers
• pixel motion is horizontal after this transformation• two homographies (3x3 transform), one for each
input image reprojection C. Loop and Z. Zhang. Computing Rectifying Homographies
for Stereo Vision. IEEE Conf. Computer Vision and Pattern Recognition, 1999.

Rectification
Original image pairs
Rectified image pairs

Stereo matching algorithms
Match Pixels in Conjugate Epipolar Lines• Assume brightness constancy
• This is a tough problem
• Numerous approaches> A good survey and evaluation: http://www.middlebury.edu/stereo/

Your basic stereo algorithm
For each epipolar line
For each pixel in the left image• compare with every pixel on same epipolar line in right image
• pick pixel with minimum matching cost
Improvement: match windows• This should look familiar.. (cross correlation or SSD)• Can use Lukas-Kanade or discrete search (latter more common)

Window size
• Smaller window+
-
• Larger window+
-
W = 3 W = 20
Effect of window size

More constraints?
We can enforce more constraints to reduce matching ambiguity - smoothness constraints: computed disparity at a pixel
should be consistent with neighbors in a surrounding window.
- uniqueness constraints: the matching needs to be bijective
- ordering constraints: e.g., computed disparity at a pixel
should not be larger than the disparity of its right neighbor pixel by
more than one pixel.
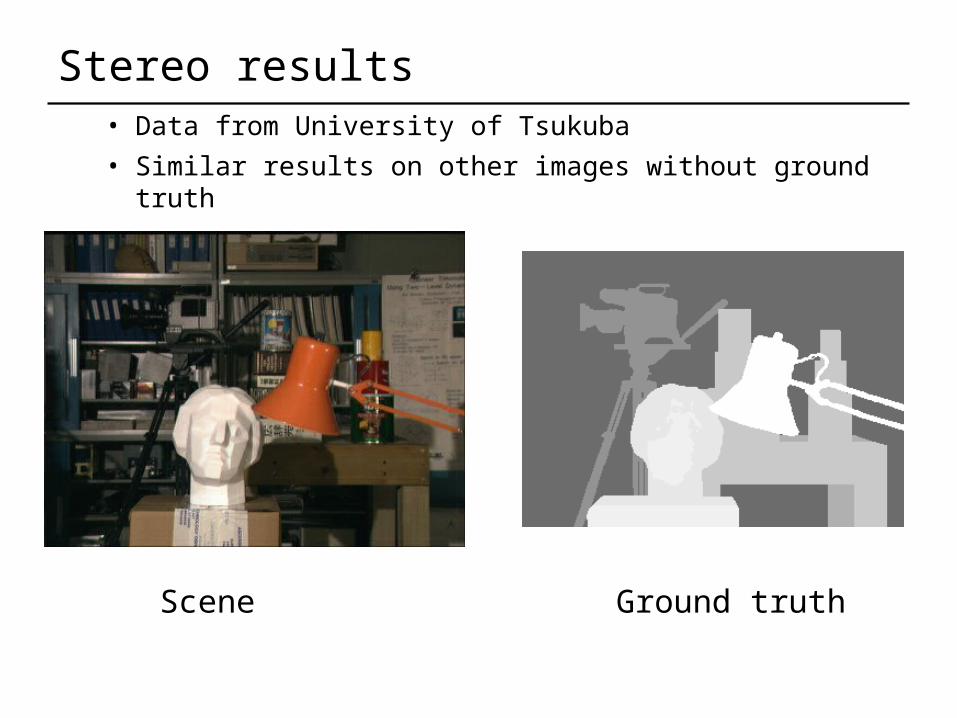
Stereo results
Ground truthScene
• Data from University of Tsukuba
• Similar results on other images without ground truth

Results with window search
Window-based matching(best window size)
Ground truth

Better methods exist...
A better methodBoykov et al., Fast Approximate Energy Minimization via Graph Cuts,
International Conference on Computer Vision, September 1999.
Ground truth

More recent development
High-Quality Single-Shot Capture of Facial Geometry [siggraph 2010, project website] - capture high-fidelity facial geometry from multiple cameras
- pairwise stereo reconstruction between neighboring cameras
- hallucinate facial details
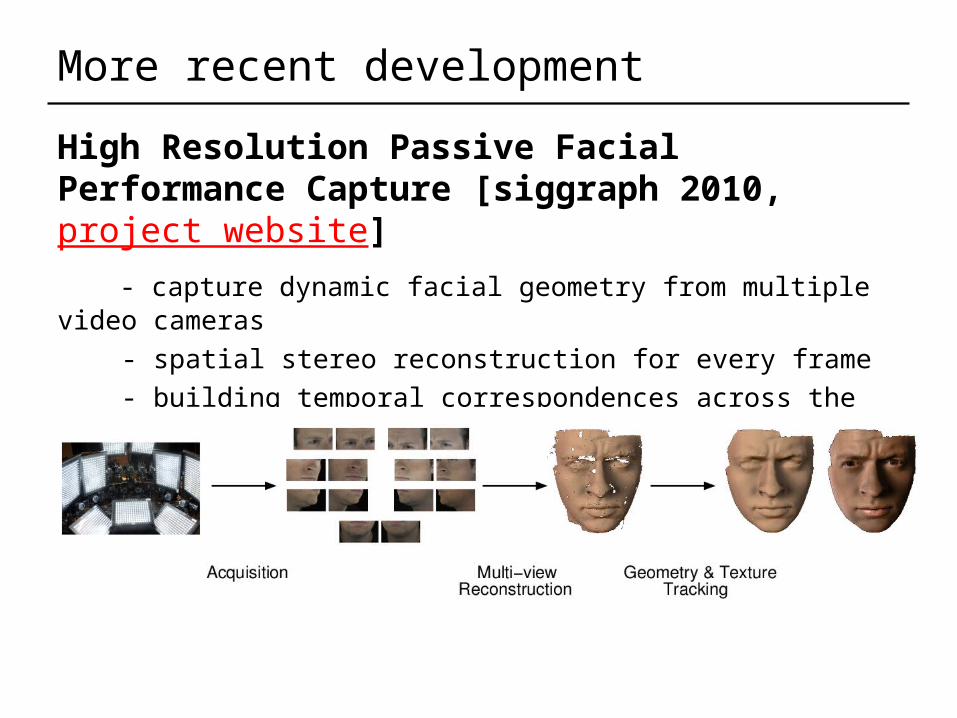
More recent development
High Resolution Passive Facial Performance Capture [siggraph 2010, project website] - capture dynamic facial geometry from multiple video cameras
- spatial stereo reconstruction for every frame
- building temporal correspondences across the entire sequence

Stereo reconstruction pipeline
Steps• Calibrate cameras
• Rectify images
• Compute disparity
• Estimate depth

• Camera calibration errors
• Poor image resolution
• Occlusions
• Violations of brightness constancy (specular reflections)
• Large motions
• Low-contrast image regions
Stereo reconstruction pipeline
Steps• Calibrate cameras
• Rectify images
• Compute disparity
• Estimate depth
What will cause errors?

Outline
Stereo matching - Traditional stereo
- Active stereo
Volumetric stereo - Visual hull
- Voxel coloring
- Space carving

Active stereo with structured light
Project “structured” light patterns onto the object• simplifies the correspondence problem
camera 2
camera 1
projector
camera 1
projector
Li Zhang’s one-shot stereo

Active stereo with structured light
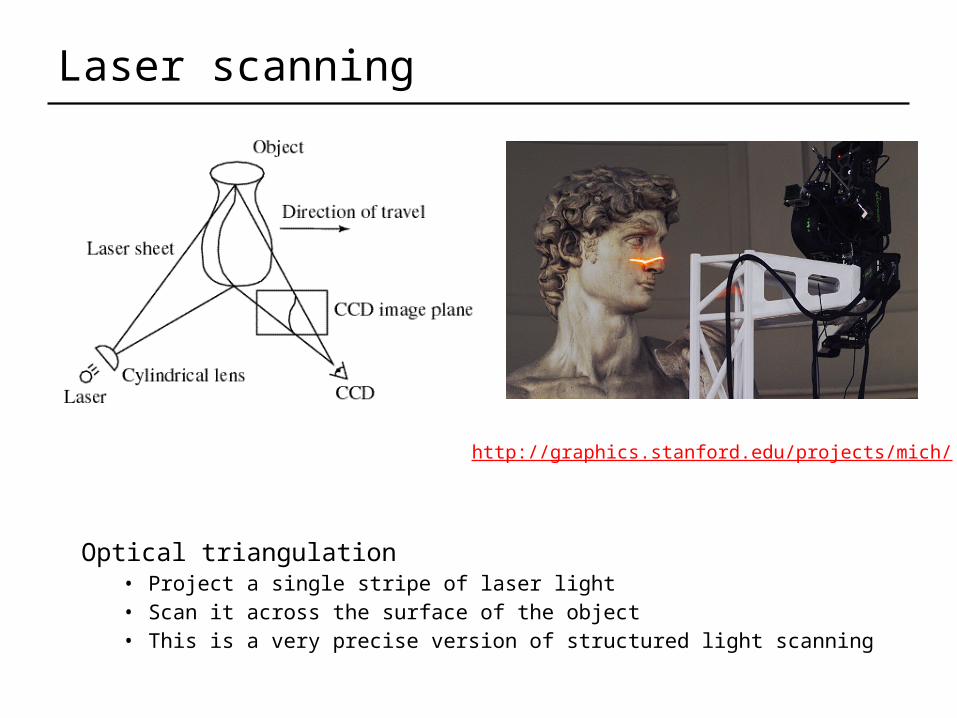
Laser scanning
Optical triangulation• Project a single stripe of laser light• Scan it across the surface of the object• This is a very precise version of structured light scanning
Digital Michelangelo Projecthttp://graphics.stanford.edu/projects/mich/

Laser scanned models
The Digital Michelangelo Project, Levoy et al.

Laser scanned models
The Digital Michelangelo Project, Levoy et al.

Recent development
Capturing dynamic facial movement using active stereo [project website] - use synchronized video cameras and structured light projectors to capture dynamic facial geometry
- use a generic 3D model to build temporal correspondences across the entire sequence