
C104- Engineering Mechanics
128
Engineering Mechanics C104 MODULE I Force The simplest way to define a force is by just thinking of pull or push. More generally, force is defined as an action that tends to disturb a body. This disturbance can be thought of as translation, rise, fall, rotation, spinning, and so forth. Consider a block resting on a table. Connect a cable to the block and start pulling the block. If the right amount of force is applied, the block will start to move. The amount of movement obviously depends on the amount and duration of the applied force. The force can be applied directly to a body, such as pulling a car using a towrope, or indirectly, such as gravitational force. Gravitational force is the force the earth exerts on objects that pulls them toward its center. This force is known as the weight of the object and can be obtained by using a weighing scale. A force is that which can cause an object with mass to accelerate. Force has both magnitude and direction, making it a vector quantity. According to Newton's second law, an object with constant mass will accelerate in proportion to the net force acting upon it and in inverse proportion to its mass. An equivalent formulation is that the net force on an object is equal to the rate of change of momentum it experiences. Forces acting on three-dimensional objects may also cause them to rotate or deform, or result in a change in pressure. The tendency of a force to cause angular acceleration about an axis is termed torque. Deformation and pressure are the result of stress forces within an object. Since antiquity, scientists have used the concept of force in the study of stationary and moving objects. These studies culminated with the descriptions made by the third century BC philosopher Archimedes of how simple machines Civil Engineering Department, SNGCE, Kadayiruppu. 1 | Page
-
Upload
angelo-montelibano-patron -
Category
Documents
-
view
232 -
download
1
Transcript of C104- Engineering Mechanics

Engineering Mechanics C104
MODULE I
Force
The simplest way to define a force is by just thinking of pull or push. More generally, force is defined as an action that tends to disturb a body. This disturbance can be thought of as translation, rise, fall, rotation, spinning, and so forth.
Consider a block resting on a table. Connect a cable to the block and start pulling the block. If the right amount of force is applied, the block will start to move. The amount of movement obviously depends on the amount and duration of the applied force. The force can be applied directly to a body, such as pulling a car using a towrope, or indirectly, such as gravitational force. Gravitational force is the force the earth exerts on objects that pulls them toward its center. This force is known as the weight of the object and can be obtained by using a weighing scale.
A force is that which can cause an object with mass to accelerate. Force has both magnitude and direction, making it a vector quantity. According to Newton's second law, an object with constant mass will accelerate in proportion to the net force acting upon it and in inverse proportion to its mass. An equivalent formulation is that the net force on an object is equal to the rate of change of momentum it experiences. Forces acting on three-dimensional objects may also cause them to rotate or deform, or result in a change in pressure. The tendency of a force to cause angular acceleration about an axis is termed torque. Deformation and pressure are the result of stress forces within an object.
Since antiquity, scientists have used the concept of force in the study of stationary and moving objects. These studies culminated with the descriptions made by the third century BC philosopher Archimedes of how simple machines functioned. The rules Archimedes determined for how forces interact in simple machines are still a part of physics. Earlier descriptions of forces by Aristotle incorporated fundamental misunderstandings which would not be corrected until the seventeenth century by Isaac Newton. Newtonian descriptions of forces remained unchanged for nearly three hundred years.
Charecteristics
Characteristics of force are the magnitude, direction(orientation) and point of application
Types of forces
Collinear : If several forces lie along the same line-of –action, they are said to be collinear.Coplanar When all forces acting on a body are in the same plane, the forces are coplanar.Civil Engineering Department, SNGCE, Kadayiruppu.
1 | P a g e

Engineering Mechanics C104
Concurrent Forces
In a concurrent force system, all forces pass through a common point. In the previous case involving the application of two forces to a body, it was necessary for them to be collinear, opposite in direction, and equal in magnitude for the body to be in equilibrium. If three forces are applied to a body, as shown in the figure, they must pass through a common point (O), or else the condition, Mo = 0, will not be satisfied and the body will rotate because of unbalanced moment. Moreover, the magnitudes of the forces must be such that the force equilibrium equations, Fx = 0, Fy= 0, are satisfied.
It is fairly easy to see the reasoning for the first condition. Consider the two forces, F1 and F2, intersecting at point O in the figure. The sum of moments of these two forces about point 0 is obviously equal to zero because they both pass through 0. If F3
does not pass through 0, on the other hand, it will have some nonzero moment about that point. Since this nonzero moment will cause the body to rotate, the body will not be in equilibrium.
Therefore, not only do three nonparallel forces applied to a body have to be concurrent for the body to be in an equilibrium state, but their magnitudes and directions must be such that the force equilibrium con-ditions are satisfied (Fx = Fy = 0). Notice that there is no need for the moment equilibrium equation in this case since it is automatically satisfied
Civil Engineering Department, SNGCE, Kadayiruppu.2 | P a g e

Engineering Mechanics C104
A concurrent force system contains forces whose lines-of action meet at some one point. Forces may be tensile (pulling)
Forces may be compressive (pushing)
Civil Engineering Department, SNGCE, Kadayiruppu.3 | P a g e

Engineering Mechanics C104
Force exerted on a body has two effects:
The external effect, which is tendency to change the motion of the body or to develop resisting forces in the body
The internal effect, which is the tendency to deform the body.
Newton's laws of motion
Newton's laws of motion are three physical laws that form the basis for classical mechanics, directly relating the forces acting on a body to the motion of the body. They were first compiled by Sir Isaac Newton in his work Philosophiae Naturalis Principia Mathematica, first published on July 5, 1687. Newton used them to explain and investigate the motion of many physical objects and systems. For example, in the third volume of the text, Newton showed that these laws of motion, combined with his law of universal gravitation, explained Kepler's laws of planetary motion.
First law There exists a set of inertial reference frames relative to which all particles with no net force acting on them will move without change in their velocity. This law is often simplified as "A body persists its state of rest or of uniform motion unless acted upon by an external unbalanced force." Newton's first law is often referred to as the law of inertia.
Second law Observed from an inertial reference frame, the net force on a particle of constant mass is proportional to the time rate of change of its linear momentum: F = d(mv)/dt. This law is often stated as, "Force equals mass times acceleration (F = ma)": the net force on an object is equal to the mass of the object multiplied by its acceleration.
Third law Whenever a particle A exerts a force on another particle B, B simultaneously exerts a force on A with the same magnitude in the opposite direction. The strong form of the law further postulates that these two forces act along the same line. This law is often simplified into the sentence, "To every action there is an equal and opposite reaction."
In the given interpretation mass, acceleration, momentum, and (most importantly) force are assumed to be externally defined quantities. This is the most common, but not the only interpretation: one can consider the laws to be a definition of these quantities. Notice that the second law only holds when the observation is made from an inertial reference frame, and since an inertial reference frame is defined by the first law, asking a proof of the first law from the second law is a logical fallacy. At speeds approaching the speed of light the effects of special relativity must be taken into account.
Civil Engineering Department, SNGCE, Kadayiruppu.4 | P a g e

Engineering Mechanics C104
Free-body diagrams
Free-body diagrams can be used as a convenient way to keep track of forces acting on a system. Ideally, these diagrams are drawn with the angles and relative magnitudes of the force vectors preserved so that graphical vector addition can be done to determine the resultant.
As well as being added, forces can also be resolved into independent components at right angles to each other. A horizontal force pointing northeast can therefore be split into two forces, one pointing north, and one pointing east. Summing these component forces using vector addition yields the original force. Resolving force vectors into components of a set of basis vectors is often a more mathematically clean way to describe forces than using magnitudes and directions. This is because, for orthogonal components, the components of the vector sum are uniquely determined by the scalar addition of the components of the individual vectors. Orthogonal components are independent of each other; forces acting at ninety degrees to each other have no effect on each other. Choosing a set of orthogonal basis vectors is often done by considering what set of basis vectors will make the mathematics most convenient. Choosing a basis vector that is in the same direction as one of the forces is desirable, since that force would then have only one non-zero component. Force vectors can also be three-dimensional, with the third component at right-angles to the two other components.
Principle of Transmissibility
The principle of transmissibility states that the condition of equilibrium or of motion of a rigid body will remain unchanged if a force F action at a given point of the rigid body is replace by a force F’ of the same magnitude and the same direction, but acting at a different point, provided that the two forces have the same line of action.
Civil Engineering Department, SNGCE, Kadayiruppu.5 | P a g e

Engineering Mechanics C104
ResolutionThe process of reducing a force system to a simpler equivalent system is called a reduction. The process of expanding a force or a force system into a less simple equivalent system is called a resolutionIf the force system acting on a body produces no external effect, the forces are said to be in balance and the body experience no change in motion is said to be in equilibrium.
Resultant Forces
If two forces P and Q acting on a particle A may be replaced by a single force R, which has the same effect on the particle. This force is called the resultant of the forces P and Q and may be obtained by constructing a parallelogram, using P and Q as two sides of the parallelogram. The diagonal that pass through A represents the resultant. This is known as the parallelogram law for the addition of two forces. This law is based on experimental evidence,; it can not be proved or derived mathematically.
Civil Engineering Department, SNGCE, Kadayiruppu.6 | P a g e

Engineering Mechanics C104
For multiple forces action on a point, the forces can be broken into the components of x and y.
Civil Engineering Department, SNGCE, Kadayiruppu.7 | P a g e

Engineering Mechanics C104
Equilibria
Equilibrium occurs when the resultant force acting on an object is zero (that is, the vector sum of all forces is zero). There are two kinds of equilibrium: static equilibrium and dynamic equilibrium.
System in equilibrium
A system is in equilibrium when the sum of all forces is zero.
For example consider a system consisting of an object that is being lowered vertically by a string with tension, T, at a constant velocity. The system has a constant velocity and is therefore in equilibrium because the tension in the string (which is pulling up on the object) is equal to the force of gravity, mg, which is pulling down on the object. (Assume up is positive and down is negative.)
Static equilibrium
The simplest case of static equilibrium occurs when two forces are equal in magnitude but opposite in direction. For example, an object on a level surface is pulled (attracted) downward toward the center of the Earth by the force of gravity. At the same time, surface forces resist the downward force with equal upward force (called the normal force). The situation is one of zero net force and no acceleration.
Pushing against an object on a frictional surface can result in a situation where the object does not move because the applied force is opposed by static friction, generated between the object and the table surface. For a situation with no movement, the static friction force exactly balances the applied force resulting in no acceleration. The static friction increases or decreases in response to the applied force up to an upper limit determined by the characteristics of the contact between the surface and the object
A static equilibrium between two forces is the most usual way of measuring forces, using simple devices such as weighing scales and spring balances. For example,
Civil Engineering Department, SNGCE, Kadayiruppu.8 | P a g e

Engineering Mechanics C104
an object suspended on a vertical spring scale experiences the force of gravity acting on the object balanced by a force applied by the "spring reaction force" which is equal to the object's weight. Using such tools, some quantitative force laws were discovered: that the force of gravity is proportional to volume for objects of constant density (widely exploited for millennia to define standard weights); Archimedes' principle for buoyancy; Archimedes' analysis of the lever; Boyle's law for gas pressure; and Hooke's law for springs. These were all formulated and experimentally verified before Isaac Newton expounded his three laws of motion.
Dynamical equilibrium
Dynamical equilibrium was first described by Galileo who noticed that certain assumptions of Aristotelian physics were contradicted by observations and logic. Galileo realized that simple velocity addition demands that the concept of an "absolute rest frame" did not exist. Galileo concluded that motion in a constant velocity was completely equivalent to rest. This was contrary to Aristotle's notion of a "natural state" of rest that objects with mass naturally approached. Simple experiments showed that Galileo's understanding of the equivalence of constant velocity and rest to be correct. For example, if a mariner dropped a cannonball from the crow's nest of a ship moving at a constant velocity, Aristotelian physics would have the cannonball fall straight down while the ship moved beneath it. Thus, in an Aristotelian universe, the falling cannonball would land behind the foot of the mast of a moving ship. However, when this experiment is actually conducted, the cannonball always falls at the foot of the mast, as if the cannonball knows to travel with the ship despite being separated from it. Since there is no forward horizontal force being applied on the cannonball as it falls, the only conclusion left is that the cannonball continues to move with the same velocity as the boat as it falls. Thus, no force is required to keep the cannonball moving at the constant forward velocity.
Moreover, any object traveling at a constant velocity must be subject to zero net force (resultant force). This is the definition of dynamical equilibrium: when all the forces on an object balance but it still moves at a constant velocity.
A simple case of dynamical equilibrium occurs in constant velocity motion across a surface with kinetic friction. In such a situation, a force is applied in the direction of motion while the kinetic friction force exactly opposes the applied force. This results in a net zero force, but since the object started with a non-zero velocity, it continues to move with a non-zero velocity. Aristotle misinterpreted this motion as being caused by the applied force. However, when kinetic friction is taken into consideration it is clear that there is no net force causing constant velocity motion.
Civil Engineering Department, SNGCE, Kadayiruppu.9 | P a g e

Engineering Mechanics C104
SUPPORT REACTION
Types of Forces(Loads)
Point loads - concentrated forces exerted at point or location
Distributed loads - a force applied along a length or over an area. The distribution can be uniform or non-uniform.
Civil Engineering Department, SNGCE, Kadayiruppu.10 | P a g e

Engineering Mechanics C104
PROBLEMS::Question 1
Civil Engineering Department, SNGCE, Kadayiruppu.11 | P a g e

Engineering Mechanics C104
Question 2
Civil Engineering Department, SNGCE, Kadayiruppu.12 | P a g e

Engineering Mechanics C104
Civil Engineering Department, SNGCE, Kadayiruppu.13 | P a g e

Engineering Mechanics C104
Example ProblemsExample Problems
1.Determine the magnitude and direction of the resultant of the two forces.
2.Two structural members B and C are riveted to the bracket A. Knowing that the tension in member B is 6 kN and the tension in C is 10 kN, Civil Engineering Department, SNGCE, Kadayiruppu.
14 | P a g e

Engineering Mechanics C104
determine the magnitude and direction of the resultant force acting on the bracket.
Civil Engineering Department, SNGCE, Kadayiruppu.15 | P a g e

Engineering Mechanics C104
3.Determine the magnitude and direction of P so that the resultant of P and the 900-N force is a vertical force of 2700-N directed downward.
Civil Engineering Department, SNGCE, Kadayiruppu.16 | P a g e

Engineering Mechanics C104
4A cylinder is to be lifted by two cables. Knowing that the tension in one cable is 600 N, determine the magnitude and direction of the force so that the resultant of the vertical force of 900 N.
Civil Engineering Department, SNGCE, Kadayiruppu.17 | P a g e

Engineering Mechanics C104
5 Determine the force in each supporting wire.
Civil Engineering Department, SNGCE, Kadayiruppu.18 | P a g e

Engineering Mechanics C104
6.The stoplight is supported by two wires. The light weighs 75-lb and the wires make an angle of 10o with the horizontal. What is the force in each wire?
Civil Engineering Department, SNGCE, Kadayiruppu.19 | P a g e

Engineering Mechanics C104
7.In a ship-unloading operation, a 3500-lb automobile is supported by a cable. A rope is tied to the cable at A and pulled in order to center the automobile over its intended position. The angle between the cable and the vertical is 2o, while the angle between the rope and the horizontal is 30o. What is the tension in the rope?
Civil Engineering Department, SNGCE, Kadayiruppu.20 | P a g e

Engineering Mechanics C104
8. The barge B is pulled by two tugboats A and C. At a given instant the tension in cable AB is 4500-lb and the tension in cable BC is 2000-lb. Determine the magnitude and direction of the resultant of the two forces applied at B at that instant.
Civil Engineering Department, SNGCE, Kadayiruppu.21 | P a g e

Engineering Mechanics C104
9. Determine the resultant of the forces on the bolt.
Civil Engineering Department, SNGCE, Kadayiruppu.22 | P a g e

Engineering Mechanics C104
10. Determine which set of force system is in equilibrium. For those force systems that are not in equilibrium, determine the balancing force required to place the body in equilibrium.
Civil Engineering Department, SNGCE, Kadayiruppu.23 | P a g e

Engineering Mechanics C104
11.Two forces P and Q of magnitude P=1000-lb and Q=1200-lb are applied to the aircraft connection. Knowing that the connection is in equilibrium, determine the tensions T1 and T2
Civil Engineering Department, SNGCE, Kadayiruppu.24 | P a g e

Engineering Mechanics C104
12.Determine the forces in each of the four wires.
Civil Engineering Department, SNGCE, Kadayiruppu.25 | P a g e

Engineering Mechanics C104
13.The blocks are at rest on a frictionless incline. Solve for the forces F1 and F2 required for equilibrium.
Civil Engineering Department, SNGCE, Kadayiruppu.26 | P a g e

Engineering Mechanics C104
14.Length A= 5 ft, and length B =10 ft and angle = 30o. Determine the angle of the incline in order to maintain equilibrium.
Civil Engineering Department, SNGCE, Kadayiruppu.27 | P a g e

Engineering Mechanics C104
15.Solve for the resisting force at pin A to maintain equilibrium.
Civil Engineering Department, SNGCE, Kadayiruppu.28 | P a g e

Engineering Mechanics C104
MODULE II
Center of mass
The center of mass of a system of particles is a specific point at which, for many purposes, the system's mass behaves as if it were concentrated. The center of mass is a function only of the positions and masses of the particles that comprise the system. In the case of a rigid body, the position of its center of mass is fixed in relation to the object (but not necessarily in contact with it). In the case of a loose distribution of masses in free space, such as, say, shot from a shotgun, the position of the center of mass is a point in space among them that may not correspond to the position of any individual mass. In the context of an entirely uniform gravitational field, the center of mass is often called the center of gravity — the point where gravity can be said to act.
The center of mass of a body does not always coincide with its intuitive geometric center, and one can exploit this freedom. Engineers try to design a sports car's center of gravity as low as possible to make the car handle better. When high jumpers perform a
Civil Engineering Department, SNGCE, Kadayiruppu.29 | P a g e

Engineering Mechanics C104
"Fosbury Flop", they bend their body in such a way that it is possible for the jumper to clear the bar while his or her center of mass does not.
The so-called center of gravity frame (a less-preferred term for the center of momentum frame) is an inertial frame defined as the inertial frame in which the center of mass of a system is at rest.
Civil Engineering Department, SNGCE, Kadayiruppu.30 | P a g e

Engineering Mechanics C104
Examples
The center of mass of a two-particle system lies on the line connecting the particles (or, more precisely, their individual centers of mass). The center of mass is closer to the more massive object; for details, see barycenter below.
The center of mass of a ring is at the center of the ring (in the air). The center of mass of a solid triangle lies on all three medians and therefore at the
centroid, which is also the average of the three vertices. The center of mass of a rectangle is at the intersection of the two diagonals. In a spherically symmetric body, the center of mass is at the center. This
approximately applies to the Earth: the density varies considerably, but it mainly depends on depth and less on the other two coordinates.
More generally, for any symmetry of a body, its center of mass will be a fixed point of that symmetry.
MOMENT OF INERTIA
Moment of inertia, also called mass moment of inertia or the angular mass, (SI units kg m2) is a measure of an object's resistance to changes in its rotation rate. It is the rotational analog of mass. That is, it is the inertia of a rigid rotating body with respect to its rotation. The moment of inertia plays much the same role in rotational dynamics as mass does in basic dynamics, determining the relationship between angular momentum and angular velocity, torque and angular acceleration, and several other quantities. While a simple scalar treatment of the moment of inertia suffices for many situations, a more advanced tensor treatment allows the analysis of such complicated systems as spinning tops and gyroscope motion.
The symbol I and sometimes J are usually used to refer to the moment of inertia.
The moment of inertia of an object about a given axis describes how difficult it is to change its angular motion about that axis. For example, consider two discs (A and B) of the same mass. Disc A has a larger radius than disc B. Assuming that there is uniform thickness and mass distribution, it requires more effort to accelerate disc A (change its
Civil Engineering Department, SNGCE, Kadayiruppu.31 | P a g e

Engineering Mechanics C104
angular velocity) because its mass is distributed further from its axis of rotation: mass that is further out from that axis must, for a given angular velocity, move more quickly than mass closer in. In this case, disc A has a larger moment of inertia than disc B.
The moment of inertia has two forms, a scalar form I (used when the axis of rotation is known) and a more general tensor form that does not require knowing the axis of rotation. The scalar moment of inertia I (often called simply the "moment of inertia") allows a succinct analysis of many simple problems in rotational dynamics, such as objects rolling down inclines and the behavior of pulleys. For instance, while a block of any shape will slide down a frictionless decline at the same rate, rolling objects may descend at different rates, depending on their moments of inertia. A hoop will descend more slowly than a solid disk of equal mass and radius because more of its mass is located far from the axis of rotation, and thus needs to move faster if the hoop rolls at the same angular velocity. However, for (more complicated) problems in which the axis of rotation can change, the scalar treatment is inadequate, and the tensor treatment must be used (although shortcuts are possible in special situations). Examples requiring such a treatment include gyroscopes, tops, and even satellites, all objects whose alignment can change.
The moment of inertia can also be called the mass moment of inertia (especially by mechanical engineers) to avoid confusion with the second moment of area, which is sometimes called the moment of inertia (especially by structural engineers) and denoted by the same symbol I. The easiest way to differentiate these quantities is through their units. In addition, the moment of inertia should not be confused with the polar moment of inertia, which is a measure of an object's ability to resist torsion (twisting).
Definition
A simple definition of the moment of inertia of any object, be it a point mass or a 3D-structure, is given by:
where
'dm' is the mass of an infinitesimally small part of the body and r is the (perpendicular) distance of the point mass to the axis of rotation.
Detailed Analysis
The (scalar) moment of inertia of a point mass rotating about a known axis is defined by
Civil Engineering Department, SNGCE, Kadayiruppu.32 | P a g e

Engineering Mechanics C104
The moment of inertia is additive. Thus, for a rigid body consisting of N point masses mi with distances ri to the rotation axis, the total moment of inertia equals the sum of the point-mass moments of inertia:
For a solid body described by a continuous mass density function ρ(r), the moment of inertia about a known axis can be calculated by integrating the square of the distance (weighted by the mass density) from a point in the body to the rotation axis:
where
V is the volume occupied by the object. ρ is the spatial density function of the object, and
are coordinates of a point inside the body.
Diagram for the calculation of a disk's moment of inertia. Here k is 1/2 and r is the radius used in determining the moment.
Based on dimensional analysis alone, the moment of inertia of a non-point object must take the form:
where
M is the mass R is the radius of the object from the center of mass (in some cases, the length of the object is used instead.) k is a dimensionless constant called the inertia constant that varies with the object in consideration.
Civil Engineering Department, SNGCE, Kadayiruppu.33 | P a g e

Engineering Mechanics C104
Inertial constants are used to account for the differences in the placement of the mass from the center of rotation. Examples include:
k = 1, thin ring or thin-walled cylinder around its center, k = 2/5, solid sphere around its center k = 1/2, solid cylinder or disk around its center.
Parallel axis theorem
Once the moment of inertia has been calculated for rotations about the center of mass of a rigid body, one can conveniently recalculate the moment of inertia for all parallel rotation axes as well, without having to resort to the formal definition. If the axis of rotation is displaced by a distance R from the center of mass axis of rotation (e.g. spinning a disc about a point on its periphery, rather than through its center,) the displaced and center-moment of inertia are related as follows:
This theorem is also known as the parallel axes rule and is a special case of Steiner's parallel-axis theorem.
Perpendicular Axis Theorem
The perpendicular axis theorem for planar objects can be demonstrated by looking at the contribution to the three axis moments of inertia from an arbitrary mass element. From the point mass moment, the contributions to each of the axis moments of inertia are
Civil Engineering Department, SNGCE, Kadayiruppu.34 | P a g e

Engineering Mechanics C104
Composite bodies
If a body can be decomposed (either physically or conceptually) into several constituent parts, then the moment of inertia of the body about a given axis is obtained by summing the moments of inertia of each constituent part around the same given axis.
Common Moments of Inertia
Civil Engineering Department, SNGCE, Kadayiruppu.35 | P a g e

Engineering Mechanics C104
Friction
Friction is the force resisting the relative lateral (tangential) motion of solid surfaces, fluid layers, or material elements in contact. It is usually subdivided into several varieties:
Dry friction resists relative lateral motion of two solid surfaces in contact. Dry friction is also subdivided into static friction between non-moving surfaces, and kinetic friction (sometimes called sliding friction or dynamic friction) between moving surfaces.
Lubricated friction or fluid friction resists relative lateral motion of two solid surfaces separated by a layer of gas or liquid.
Fluid friction is also used to describe the friction between layers within a fluid that are moving relative to each other.
Skin friction is a component of drag, the force resisting the motion of a solid body through a fluid.
Internal friction is the force resisting motion between the elements making up a solid material while it undergoes deformation.
Friction is not a fundamental force, as it is derived from electromagnetic force between charged particles, including electrons, protons, atoms, and molecules, and so cannot be calculated from first principles, but instead must be found empirically. When contacting surfaces move relative to each other, the friction between the two surfaces converts kinetic energy into thermal energy, or heat. Contrary to earlier explanations, kinetic friction is now understood not to be caused by surface roughness but by chemical bonding between the surfaces. Surface roughness and contact area, however, do affect kinetic friction for micro- and nano-scale objects where surface area forces dominate inertial forces.
Friction is distinct from traction. Surface area does not affect friction significantly because as contact area increases, force per unit area decreases. In traction, however, surface area is important.
Coulomb friction
Coulomb friction, named after Charles-Augustin de Coulomb, is a model used to calculate the force of dry friction. It is governed by the equation:
where
Civil Engineering Department, SNGCE, Kadayiruppu.36 | P a g e

Engineering Mechanics C104
Ff is either the force exerted by friction, or, in the case of equality, the maximum possible magnitude of this force.
μ is the coefficient of friction, which is an empirical property of the contacting materials,
Fn is the normal force exerted between the surfaces.
For surfaces at rest relative to each other μ = μs, where μs is the coefficient of static friction. This is usually larger than its kinetic counterpart. The Coulomb friction may take any value from zero up to Ff, and the direction of the frictional force against a surface is opposite to the motion that surface would experience in the absence of friction. Thus, in the static case, the frictional force is exactly what it must be in order to prevent motion between the surfaces; it balances the net force tending to cause such motion. In this case, rather than providing an estimate of the actual frictional force, the Coulomb approximation provides a threshold value for this force, above which motion would commence.
For surfaces in relative motion μ = μk, where μk is the coefficient of kinetic friction. The Coulomb friction is equal to Ff, and the frictional force on each surface is exerted in the direction opposite to its motion relative to the other surface.
This approximation mathematically follows from the assumptions that surfaces are in atomically close contact only over a small fraction of their overall area, that this contact area is proportional to the normal force (until saturation, which takes place when all area is in atomic contact), and that frictional force is proportional to the applied normal force, independently of the contact area (you can see the experiments on friction from Leonardo Da Vinci). Such reasoning aside, however, the approximation is fundamentally an empirical construction. It is a rule of thumb describing the approximate outcome of an extremely complicated physical interaction. The strength of the approximation is its simplicity and versatility – though in general the relationship between normal force and frictional force is not exactly linear (and so the frictional force is not entirely independent of the contact area of the surfaces), the Coulomb approximation is an adequate representation of friction for the analysis of many physical systems.
Static friction
Static friction is friction between two solid objects that are not moving relative to each other. For example, static friction can prevent an object from sliding down a sloped surface. The coefficient of static friction, typically denoted as μs, is usually higher than the coefficient of kinetic friction.
The static friction force must be overcome by an applied force before an object can move. The maximum possible friction force between two surfaces before sliding
Civil Engineering Department, SNGCE, Kadayiruppu.37 | P a g e

Engineering Mechanics C104
begins is the product of the coefficient of static friction and the normal force: f = μsFn. When there is no sliding occurring, the friction force can have any value from zero up to Fmax. Any force smaller than Fmax attempting to slide one surface over the other is opposed by a frictional force of equal magnitude and opposite direction. Any force larger than Fmax
overcomes the force of static friction and causes sliding to occur. The instant sliding occurs, static friction is no longer applicable and kinetic friction becomes applicable.
An example of static friction is the force that prevents a car wheel from slipping as it rolls on the ground. Even though the wheel is in motion, the patch of the tire in contact with the ground is stationary relative to the ground, so it is static rather than kinetic friction.
The maximum value of static friction, when motion is impending, is sometimes referred to as limiting friction, although this term is not used universally.
Kinetic friction
Kinetic (or dynamic) friction occurs when two objects are moving relative to each other and rub together (like a sled on the ground). The coefficient of kinetic friction is typically denoted as μk, and is usually less than the coefficient of static friction for the same materials.
Examples of kinetic friction:
Kinetic friction is when two objects are rubbing against each other. Putting a book flat on a desk and moving it around is an example of kinetic friction.
Fluid friction is the interaction between a solid object and a fluid (liquid or gas), as the object moves through the fluid. The skin friction of air on an airplane or of water on a swimmer are two examples of fluid friction. This kind of friction is not only due to rubbing, which generates a force tangent to the surface of the object (such as sliding friction). It is also due to forces that are orthogonal to the surface of the object. These orthogonal forces significantly (and mainly, if relative velocity is high enough) contribute to fluid friction. Fluid friction is the classic name of this force. This name is no longer used in modern fluid dynamics. Since rubbing is not its only cause, in modern fluid dynamics the same force is typically referred to as drag or fluid resistance, while the force component due to rubbing is called skin friction. Notice that a fluid can in some cases exert, together with drag, a force orthogonal to the direction of the relative motion of the object (lift). The net force exerted by a fluid (drag + lift) is called fluidodynamic force (aerodynamic if the fluid is a gas, or hydrodynamic if the fluid is a liquid).
Angle of friction
For the friction angle between granular material, see Angle of repose.
Civil Engineering Department, SNGCE, Kadayiruppu.38 | P a g e

Engineering Mechanics C104
For certain applications it is more useful to define static friction in terms of the maximum angle before which one of the items will begin sliding. This is called the angle of friction or friction angle. It is defined as:
tanθ = μ
where is the angle from horizontal and is the static coefficient of friction between the objects.
Other types of friction
Rolling resistance
Rolling resistance is the force that resists the rolling of a wheel or other circular object along a surface caused by deformations in the object and/or surface. Generally the force of rolling resistance is less than that associated with kinetic friction. Typical values for the coefficient of rolling resistance are 0.001.One of the most common examples of rolling resistance is the movement of motor vehicle tires on a road, a process which generates heat and sound as by-products.
Friction is a surface force that opposes motion. The frictional force is directly related to the normal force which acts to keep two solid objects separated at the point of contact. There are two broad classifications of frictional forces: static friction and kinetic friction.
The static friction force (Fsf) will exactly oppose forces applied to an object parallel to a surface contact up to the limit specified by the coefficient of static friction (μsf) multiplied by the normal force (FN). In other words the magnitude of the static friction force satisfies the inequality:
The kinetic friction force (Fkf) is independent of both the forces applied and the movement of the object. Thus, the magnitude of the force is equal to
Fkf = μkfFN,
where μkf is the coefficient of kinetic friction. For most surface interfaces, the coefficient of kinetic friction is less than the coefficient of static friction.
Coefficient of friction
The coefficient of friction (COF), also known as a frictional coefficient or friction coefficient, symbolized by the Greek letter μ, is a dimensionless scalar value which describes the ratio of the force of friction between two bodies and the force pressing them
Civil Engineering Department, SNGCE, Kadayiruppu.39 | P a g e

Engineering Mechanics C104
together. The coefficient of friction depends on the materials used; for example, ice on steel has a low coefficient of friction, while rubber on pavement has a high coefficient of friction. Coefficients of friction range from near zero to greater than one – under good conditions, a tire on concrete may have a coefficient of friction of 1.7.[citation needed]
When the surfaces are conjoined, Coulomb friction becomes a very poor approximation (for example, adhesive tape resists sliding even when there is no normal force, or a negative normal force). In this case, the frictional force may depend strongly on the area of contact. Some drag racing tires are adhesive in this way. However, despite the complexity of the fundamental physics behind friction, the relationships are accurate enough to be useful in many applications.
The force of friction is always exerted in a direction that opposes movement (for kinetic friction) or potential movement (for static friction) between the two surfaces. For example, a curling stone sliding along the ice experiences a kinetic force slowing it down.
For an example of potential movement, the drive wheels of an accelerating car experience a frictional force pointing forward; if they did not, the wheels would spin, and the rubber would slide backwards along the pavement. Note that it is not the direction of movement of the vehicle they oppose, it is the direction of (potential) sliding between tire and road.
The coefficient of friction is an empirical measurement – it has to be measured experimentally, and cannot be found through calculations. Rougher surfaces tend to have higher effective values. Most dry materials in combination have friction coefficient values between 0.3 and 0.6. Values outside this range are rarer, but teflon, for example, can have a coefficient as low as 0.04. A value of zero would mean no friction at all, an elusive property – even magnetic levitation vehicles have drag. Rubber in contact with other surfaces can yield friction coefficients from 1 to 2. Occasionally it is maintained that µ is always < 1, but this is not true. While in most relevant applications µ < 1, a value above 1 merely implies that the force required to slide an object along the surface is greater than the normal force of the surface on the object. For example, silicone rubber or acrylic rubber-coated surfaces have a coefficient of friction that can be substantially larger than 1.
Both static and kinetic coefficients of friction depend on the pair of surfaces in contact; their values are usually approximately determined experimentally. For a given pair of surfaces, the coefficient of static friction is usually larger than that of kinetic friction; in some sets the two coefficients are equal, such as teflon-on-teflon.
In the case of kinetic friction, the direction of the friction force may or may not match the direction of motion: a block sliding atop a table with rectilinear motion is subject to friction directed along the line of motion; an automobile making a turn is subject to friction acting perpendicular to the line of motion (in which case it is said to be 'normal' to it). The direction of the static friction force can be visualized as directly opposed to the force that would otherwise cause motion, were it not for the static friction
Civil Engineering Department, SNGCE, Kadayiruppu.40 | P a g e

Engineering Mechanics C104
preventing motion. In this case, the friction force exactly cancels the applied force, so the net force given by the vector sum, equals zero. It is important to note that in all cases, Newton's first law of motion holds.
While it is often stated that the COF is a "material property," it is better categorized as a "system property." Unlike true material properties (such as conductivity, dielectric constant, yield strength), the COF for any two materials depends on system variables like temperature, velocity, atmosphere and also what are now popularly described as aging and deaging times; as well as on geometric properties of the interface between the materials. For example, a copper pin sliding against a thick copper plate can have a COF that varies from 0.6 at low speeds (metal sliding against metal) to below 0.2 at high speeds when the copper surface begins to melt due to frictional heating. The latter speed, of course, does not determine the COF uniquely; if the pin diameter is increased so that the frictional heating is removed rapidly, the temperature drops, the pin remains solid and the COF rises to that of a 'low speed' test.
Approximate coefficients of friction
Civil Engineering Department, SNGCE, Kadayiruppu.41 | P a g e
MaterialsStatic friction, μs
Dry & clean LubricatedAluminum Steel 0.61Copper Steel 0.53Brass Steel 0.51Cast iron Copper 1.05Cast iron Zinc 0.85Concrete (wet) Rubber 0.30Concrete (dry) Rubber 1.0Copper Glass 0.68Glass Glass 0.94Polythene Steel 0.2 0.2Steel Steel 0.80 0.16Steel Teflon 0.04 0.04Teflon Teflon 0.04 0.04

Engineering Mechanics C104
MODULE I11
The analysis of trussesA truss: A truss is a structure made of two force members all pin connected to each other.
The method of joints: This method uses the free-body-diagram of joints in the structure to determine the forces in each member. For example, in the above structure we have 5 joints each having a free body diagram as follows
Note how Newton’s third law controls how one introduces on the joints A and on the joint B. For each joint one can write two equations . The moment equation is trivially satisfied since all forces on a joint pass trough the joint. For example, for the above truss we have 5 joints, therefore we can write 10 equations of equilibrium (two for each joint). In the above example there are seven unknown member forces (FAB, FBC, FCD, FED, FEC, FBE, FAE) plus three unknown support reactions (A, Dx, Dy), giving a total of 10 unknowns to solve for using the 10 equations obtained from equilibrium.
The method of sections: This method uses free-body-diagrams of sections of the truss to obtain unknown forces. For example, if one needs only to find the force in BC, it is possible to do this by only writing two equations. First, draw the free body diagram of Civil Engineering Department, SNGCE, Kadayiruppu.
42 | P a g e

Engineering Mechanics C104
the full truss and solve for the reaction at A by taking moments about D. Next draw the free body diagram of the section shown and take moments about E to find the force in BC.
In the method of sections one can write three equations for each free-body-diagram (two components of force and one moment equation).
Things to consider:
Zero force members: Some members in a truss cannot carry load. These members are called zero force members. Examples of zero force members are the colored members (AB, BC, and DG) in the following truss.
Consider the following free-body-diagrams
If you sum the forces in the y-direction in the left free-body-diagram, you will see that FAB must be zero since it is not balanced by another force. Then if you sum forces in the y-direction you will find that FBC must also be zero. If you sum the forces in the y direction in the right free-body-diagram, you will see that FDG must be zero since it is not balanced by another force.
A redundant joint: Sometimes a joint is redundant. For example, in the following free-body-diagram the load is directly transmitted from each member to the one opposite it without any interaction.
By summing forces along the y-direction one will get F2=F4, and by summing forces along the Y-direction one will get F1=F3.
Redundant members: Sometimes a structure contains one or more redundant members. These members must be removed from the truss, otherwise one will have an insufficient number of equations to solve for the unknown member forces. Slender members are not very useful in compression since they buckle and, as a result, lose their load carrying capability. For example, in the following truss one of the two members AC or BD is redundant. To solve the problem, we remove member BD which will go into compression as a result of the applied loading (i.e., the diagonal AC will have to increase in length and the diagonal BD will have to decease in length for the structure to bend to the right). If we did not remove this member we would have 9 unknowns (five
Civil Engineering Department, SNGCE, Kadayiruppu.43 | P a g e

Engineering Mechanics C104
member loads and four support reactions) and only 8 equations (two for each joint).
Mechanisms: Sometimes there is too much freedom in a structure. For example, the following structure cannot carry any load since it will collapse under the load.
Curved members: Remember that the two forces acting on a two-force-member are along the line connecting the two points on which the loads are applied.
Civil Engineering Department, SNGCE, Kadayiruppu.44 | P a g e

Engineering Mechanics C104
Civil Engineering Department, SNGCE, Kadayiruppu.45 | P a g e

Engineering Mechanics C104
Civil Engineering Department, SNGCE, Kadayiruppu.46 | P a g e

Engineering Mechanics C104
Civil Engineering Department, SNGCE, Kadayiruppu.47 | P a g e

Engineering Mechanics C104
Civil Engineering Department, SNGCE, Kadayiruppu.48 | P a g e

Engineering Mechanics C104
Civil Engineering Department, SNGCE, Kadayiruppu.49 | P a g e

Engineering Mechanics C104
Civil Engineering Department, SNGCE, Kadayiruppu.50 | P a g e

Engineering Mechanics C104
Civil Engineering Department, SNGCE, Kadayiruppu.51 | P a g e

Engineering Mechanics C104
Civil Engineering Department, SNGCE, Kadayiruppu.52 | P a g e

Engineering Mechanics C104
Stress and Strain: Basic Terms and ConceptsUnits
In traditional geology the unit of pressure is the bar, which is about equal to atmospheric pressure. It is also about equal to the pressure under 10 meters of water. For pressures deep in the earth we use the kilobar, equal to 1000 bars. The pressure beneath 10 km of water, or at the bottom of the deepest oceanic trenches, is about 1 kilobar. Beneath the Antarctic ice cap (maximum thickness about 5 km) the pressure is about half a kilobar at greatest.
In the SI System, the fundamental unit of length is the meter and mass is the kilogram. Important units used in geology include:
Energy: Joule: kg-m2/sec2. Five grams moving at 20 meters per second have an energy of one joule. This is about equal to a sheet of paper wadded up into a ball and thrown hard.
Force: Newton: kg-m/sec2. On the surface of the Earth, with a gravitational acceleration of 9.8 m/sec2, a newton is the force exerted by a weight of 102 grams or 3.6 ounces. A Fig Newton weighs about 15 grams; therefore one SI Newton equals approximately 7 Fig Newtons.
Pressure: Pascal = Newton/m2 or kg/m-sec2. A newton spread out over a square meter is a pretty feeble force. Atmospheric pressure is about 100,000 pascals. A manila file folder (35 g, 700 cm2 area) exerts a pressure of about 5 pascals.
By comparison with traditional pressure units, one bar = 100,000 pascals. One megapascal (Mpa) equals 10 bars, one Gigapascal (Gpa) equals 10 kilobars.
1 mile = 5280 feet 1 meter = 3.28 feet 1 hour = 60 minutes 1 minute = 60 seconds
Stress and Strain
Definitions of stress, strain and youngs modulus
Introduction
When a stretching force (tensile force) is applied to an object, it will extend. We can draw its force - extension graph to show how it will extend. Note: that this graph is true only for the object for which it was experimentally obtained. We cannot use it to deduce the behaviour of another object even if it is made of the same material. This is because extension of an object is not only dependent on the material but also on other factors like
Civil Engineering Department, SNGCE, Kadayiruppu.53 | P a g e

Engineering Mechanics C104
dimensions of the object (e.g. length, thickness etc.) It is therefore more useful to find out about the characteristic extension property of the material itself. This can be done if we draw a graph in which deformation is independent of dimensions of the object under test. This kind of graph is called stress- strain curve.
Stress Terms
Stress is defined as force per unit area. It has the same units as pressure, and in fact pressure is one special variety of stress. However, stress is a much more complex quantity than pressure because it varies both with direction and with the surface it acts on.
Compression Stress that acts to shorten an object.
Tension Stress that acts to lengthen an object.
Normal Stress Stress that acts perpendicular to a surface. Can be either compressional or tensional.
Shear Stress that acts parallel to a surface. It can cause one object to slide over another. It also tends to deform originally rectangular objects into parallelograms. The most general definition is that shear acts to change the angles in an object.
Hydrostatic Stress (usually compressional) that is uniform in all directions. A scuba diver experiences hydrostatic stress. Stress in the earth is nearly hydrostatic. The term for uniform stress in the earth is lithostatic.
Directed Stress Stress that varies with direction. Stress under a stone slab is directed; there is a force in one direction but no counteracting forces perpendicular to it. This is why a person under a thick slab gets squashed but a scuba diver under the same pressure doesn't. The scuba diver feels the same force in all directions.
In geology we never see stress. We only see the results of stress as it deforms materials. Even if we were to use a strain gauge to measure in-situ stress in the rocks, we would not measure the stress itself. We would measure the deformation of the strain gauge (that's why it's called a "strain gauge") and use that to infer the stress.
Stress
Stress is defined as the force per unit area of a material.
i.e. Stress = force / cross sectional area:
Civil Engineering Department, SNGCE, Kadayiruppu.54 | P a g e

Engineering Mechanics C104
where,
σ = stress,
F = force applied, and
A= cross sectional area of the object.
Units of s : Nm-2 or Pa.
Strain Terms
Strain is defined as the amount of deformation an object experiences compared to its original size and shape. For example, if a block 10 cm on a side is deformed so that it becomes 9 cm long, the strain is (10-9)/10 or 0.1 (sometimes expressed in percent, in this case 10 percent.) Note that strain is dimensionless.
Longitudinal or Linear Strain Strain that changes the length of a line without changing its direction. Can be either compressional or tensional.
Compression Longitudinal strain that shortens an object.
Tension Longitudinal strain that lengthens an object.
Shear Strain that changes the angles of an object. Shear causes lines to rotate.
Infinitesimal Strain Strain that is tiny, a few percent or less. Allows a number of useful mathematical simplifications and approximations.
Finite Strain Strain larger than a few percent. Requires a more complicated mathematical treatment than infinitesimal strain.
Homogeneous Strain Uniform strain. Straight lines in the original object remain straight. Parallel lines remain parallel. Circles deform to ellipses. Note that this definition rules out folding, since an originally straight layer has to remain straight.
Inhomogeneous Strain How real geology behaves. Deformation varies from place to place. Lines may bend and do not necessarily remain parallel.
Civil Engineering Department, SNGCE, Kadayiruppu.55 | P a g e

Engineering Mechanics C104
Strain
Strain is defined as extension per unit length.
Strain = extension / original length
where,
ε = strain,
lo = the original length
e = extension = (l-lo), and
l = stretched length
Strain has no units because it is a ratio of lengths.
We can use the above definitions of stress and strain for forces causing tension or compression.
If we apply tensile force we have tensile stress and tensile strain
If we apply compressive force we have compressive stress and compressive strain.
A useful tip: In calculations stress expressed in Pa is usually a very large number and strain is usually a very small number. If it comes out much different then, you've done it wrong!
Terms for Behavior of Materials
Elastic Material deforms under stress but returns to its original size and shape when the stress is released. There is no permanent deformation. Some elastic strain, like in a rubber band, can be large, but in rocks it is usually small enough to be considered infinitesimal.
Brittle Material deforms by fracturing. Glass is brittle. Rocks are typically brittle at low temperatures and pressures.
Ductile Material deforms without breaking. Metals are ductile. Many materials show both types of behavior. They may deform in a ductile manner if deformed slowly, but
Civil Engineering Department, SNGCE, Kadayiruppu.56 | P a g e

Engineering Mechanics C104
fracture if deformed too quickly or too much. Rocks are typically ductile at high temperatures or pressures.
Viscous Materials that deform steadily under stress. Purely viscous materials like liquids deform under even the smallest stress. Rocks may behave like viscous materials under high temperature and pressure.
Plastic Material does not flow until a threshhold stress has been exceeded.
Viscoelastic Combines elastic and viscous behavior. Models of glacio-isostasy frequently assume a viscoelastic earth: the crust flexes elastically and the underlying mantle flows viscously.
AXIAL STRESS
What is known as Axial (or Normal) Stress, often symbolized by the Greek letter
sigma, is defined as the force perpendicular to the cross sectional area of the member divided by the cross sectional area.
if our metal rod is tested by increasing the tension in the rod, the deformation increases. In the first region the deformation increases in proportion to the force. That is, if the amount of force is doubled, the amount of deformation is doubled. This is a form of Hooke's Law and could be written this way: F = k (deformation), where k is a constant depending on the material (and is sometimes called the spring constant). After enough force has been applied the material enters the plastic region - where the force and the deformation are not proportional, but rather a small amount of increase in force produces a large amount of deformation. In this region, the rod often begins to 'neck down', that is, the diameter becomes smaller as the rod is about to fail. Finally the rod actually breaks.
The point at which the Elastic Region ends is called the elastic limit, or the proportional limit. In actuality, these two points are not quite the same. The Elastic Limit is the point at which permanent deformation occurs, that is, after the elastic limit, if the force is taken off the sample, it will not return to its original size and shape, permanent deformation has occurred. The Proportional Limit is the point at which the deformation is no longer directly proportional to the applied force (Hooke's Law no longer holds). Although these two points are slightly different, we will treat them as the same in this course.
Next, rather than examining the applied force and resulting deformation, we will instead graph the axial stress verses the axial strain . Shown below
Civil Engineering Department, SNGCE, Kadayiruppu.57 | P a g e

Engineering Mechanics C104
We have defined the axial stress earlier. The axial strain is defined as the fractional change in length or Strain = (deformation of member) divided by the (original length of member) , Strain is often represented by the Greek symbol epsilon(), and the deformation is often represented by the Greek symbol delta(), so we may write:
(where Lo is the original length of the member) Strain has no units - since its length divided by length, however it is sometimes expressed as 'in./in.' in some texts.
As we see from figure above, the Stress verses Strain graph has the same shape and regions as the force verses deformation graph in diagram below
Civil Engineering Department, SNGCE, Kadayiruppu.58 | P a g e

Engineering Mechanics C104
. In the elastic (linear) region, since stress is directly proportional to strain, the ratio of stress/strain will be a constant (and actually equal to the slope of the linear portion of the graph). This constant is known as Young's Modulus, and is usually symbolized by an E or Y. We will use E for Young's modulus. We may now write Young's Modulus = Stress/Strain,
The value of Young's modulus - which is a measure of the amount of force needed to produce a unit deformation - depends on the material. Young's Modulus for Steel is 30 x 106 lb/in2, for Aluminum E = 10 x 106 lb/in2, and for Brass E = 15 x 106
lb/in2.To summarize our stress/strain/Hooke's Law relationships up to this point, we have:
The last relationship is just a combination of the first three, and says simply that the amount of deformation which occurs in a member is equal to the product of the force in the member and the length of the member (usually in inches) divided by Young's Modulus for the material, and divided by the cross sectional area of the member. To see applications of these relationships, we now will look at several examples. Stress and Strain
Consider a lump of clay. We can stretch it, squeeze it or twist it. In terms of physics, we say that we apply "tensile", "compressional" or "torsional" forces, respectively. In order to quantitatively describe our fun, we define the "stress" which we apply to the clay across any cross section of it as the force per unit area. Note that these dimensions are those of pressure, and are equivalent to energy per unit volume ("energy density"):
N / m 2 = J / m 3.
The resulting "strain" (deformation) which the clay experiences is defined as the fractional extension perpendicular to the cross section we are considering. For instance, when stretching a cylindrical piece of clay of radius 1 cm, with a force of 100 dynes, the stress is 100 / dynes per square cm. The cross section is a circular cut perpendicular to the force we applied to the clay, and the strain is parallel to the force. If its initial length was 10 cm, and it stretched an additional 2 cm, the strain which it experienced was 2 cm /
Civil Engineering Department, SNGCE, Kadayiruppu.59 | P a g e

Engineering Mechanics C104
10 cm = 0.2. Note that the strain is dimensionless. Note also that we did 200 ergs of work (100 dynes times 2 cm extension) to stretch the clay.
The graph of stress versus strain for a material is a veritable cornecopia of information:
The slope of the curve at any point is called the "Young's Modulus", and has dimensions of force over area. Its numerical value is indicative of the "stiffness" of the material: smaller values indicate that less stress is required for more strain. Likewise, larger values of Young's Modulus indicate that more stress is required for a given strain. Note that strain may be tensile, compressive or torsional; in general, the stress versus strain curve will differ for each material, and for each type of stress. The "strength" of the material is the maximum value of the stress before breakage. The "extensibility" is the maximum value of the strain before breakage. The "toughness" is the area under the curve between the vertical dashed lines, and is equal to the energy required to break the object. The partial area under the curve up to a given strain (less than the extensibility) is the "work of extension".
Let us revisit the collision in of this chapter. Assume for a moment that the driver's head had a mass of 5 kg, and that the area of that portion of the head which hit the windshield was 25 cm 2. The compressive strength of bone is about 16 x 10 7 Pa (N / m 2). From the definition of pressure as the force per unit area, we find that the force on the head required to fracture the skull would be 400,000 N (remember to convert the area from cgs to SI units!). This implies an acceleration of 80,000 m / s 2 (from F = m a), and if the driver's head came to rest in 3 ms, the inital velocity would have to have been 240 m / s!
As a further example of stress and strain, consider a spring. We will treat the spring as a one dimensional object, so the only stress will be extensional (or compressional, which will be the negative of extension), and the units will be force per unit extension. Within a range of extension, the spring obeys "Hooke's Law", which states that Young's Modulus is a constant: the stress versus strain curve is a straight line:
F = - k x,
where k (which is positive) is Young's Modulus, here called the "spring constant" (with dimensions of force over length), and x is the amount of extension. The negative sign indicates that the force is in the opposite direction of extension: if you extend the spring, the force tries to restore it to its original length. Likewise, if you compress the spring (x < 0), the force attempts to expand the spring, again to its original length. The area under the curve is
U = 1/2 k (x) 2,
Civil Engineering Department, SNGCE, Kadayiruppu.60 | P a g e

Engineering Mechanics C104
which gives the work of extension, or alternatively, the amount of potential energy stored in the spring. We will return to this model when we deal with arterial walls which we will treat as springs.
Finally, we mention that the stress versus strain curve is not necessarily the same during the relaxation of stress as it was during the loading (application) of the stress. This phenomenon is called "hysteresis", and the ratio of the area under the relaxation curve to that under the loading curve (for a given strain) is called the "resiliance" (usually expressed as a percentage).
Shear Stress & Strain SHEARSTRESS
In additional to Axial (or normal) Stress and Strain (discussed in topic 2.1and 2.2), we may also have what is known as Shear Stress and Shear Strain.In Diagram 1 we have shown a metal rod which is solidly attached to the floor. We then exert a force, F, acting at angle theta with respect to the horizontal, on the rod. The component of the Force perpendicular to the surface area will produce an Axial Stress on the rod given by Force perpendicular to an area dividedbythearea,
The component of the Force parallel to the area will also effect the rod by producing a Shear Stress, defined as Force parallel to an area divided by the area, where the Greek letter, Tau, is used to represent Shear Stress. The units of both Axial and Shear Stress will normally be lb/in2 or N/m2.
ShearStrain:
Just as an axial stress results in an axial strain, which is the change in the length divided by the original length of the member, so does shear stress produce a shear strain. Both Axial Strain and Shear Strain are shown in figure above. The shear stress produces a displacement of the rod as indicated in the right drawing in figure above. The edge of the rod is displaced a horizontal distance, from its initial position. This displacement (or horizontal deformation) divided by the length of the rod L is equal to the Shear Strain. Examining the small triangle made by , L and the side of the rod, we see that the Shear Strain, is also equal to the tangent of the angle gamma, and since the amount of displacement is quite small the tangent of the angle is approximately equal to the angle
Civil Engineering Department, SNGCE, Kadayiruppu.61 | P a g e

Engineering Mechanics C104
itself.
As with Axial Stress and Strain, Shear Stress and Strain are proportional in the elastic region of the material. This relationship may be expressed as G = Shear Stress/Shear Strain, where G is a property of the material and is called the Modulus of Rigidity (or at times, the Shear Modulus) and has units of lb/in2. The Modulus of Rigidity for Steel is approximately 12 x 106 lb/in2.
If a graph is made of Shear Stress versus Shear Strain, it will normally exhibit the same characteristics as the graph of Axial Stress versus Axial Strain. There is an Elastic Region in which the Stress is directly proportional to the Strain. The point at which the Elastic Region ends is called the elastic limit, or the proportional limit. In actuality, these two points are not quite the same. The Elastic Limit is the point at which permanent deformation occurs, that is, after the elastic limit, if the force is taken off the sample, it will not return to its original size and shape, permanent deformation has occurred. The Proportional Limit is the point at which the deformation is no longer directly proportional to the applied force (Hooke's Law no longer holds). Although these two points are slightly different, we will treat them as the same in this course. There is a Plastic Region, where a small increase in the Shear Stress results in a larger increase in Shear Strain, and finally there is a Failure Point where the sample fails in shear.
To summarize our shear stress/strain/Hooke's Law relationships up to this point, we have:
Thermal Stress, Strain & Deformation - I
Changes in temperatures causes thermal effects on materials. Some of these thermal effects include thermal stress, strain, and deformation. The first effect we will consider is thermal deformation. Thermal deformation simply means that as the "thermal" energy (and temperature) of a material increases, so does the vibration of its atoms/molecules; and this increased vibration results in what can be considered a stretching of the molecular bonds - which causes the material to expand. Of course, if the thermal energy
Civil Engineering Department, SNGCE, Kadayiruppu.62 | P a g e

Engineering Mechanics C104
(and temperature) of a material decreases, the material will shrink or contract. For a long rod the main thermal deformation occurs along the length of the rod, where (alpha) is the linear coefficient of expansion for the material, and is the fractional change in length per degree change in temperature. [Some values of the linear coefficient of expansion are: Steel = 12 x 10-6/oC = 6.5 x 10-6/oF; Brass = 20 x 10-6/oC = 11 x 10-6/oF; Aluminum = 23 x 10-6/oC = 13 x 10-6/oF.] The term is the temperature change the material experiences, which represents (Tf - To), the final temperature minus the original temperature. If the change in temperature is positive we have thermal expansion, and if negative, thermal contraction. The term 'L' represents the initial length of the rod.
Example1
1A twelve foot steel rod is initially at a temperature of 0oF and experiences a temperature increase to a final temperature of 80oF. What is the resultant change in length of the steel?
Solution:
Deformation = 6.5 x 10-6/oF (80oF- 0oF) (144 inches) = .075 inches
(The length of the rod was converted into inches in the equation since the deformations are normally quite small.) We see the deformation is indeed quite small, and in many cases the thermal deformation has no significant effect on the structure. However, if the structure or members of the structure are constrained such that the thermal expansion can not occur, then a significant thermal stress may arise which can effect the structure substantially - and which we will address shortly.
In addition to the length, both the area and volume of a material will change with a corresponding change in temperature. The resulting changes in area and volume are given by:
These formulas, as written, are not exact. In the derivations [using (L + L)2 for area, and (L + L)3 for Volume] there are cross terms involving the linear coefficient of expansion squared in the area formula, and the coefficient of expansion squared and cubed in the volume formula. These terms are very small and can be ignored, resulting in the two equations above.
While unconstrained thermal expansion is relatively straight forward effect, it still requires a bit of thought, such as in the following question.
A flat round copper plate has a hole in the center. The plate is heated and expands.
Civil Engineering Department, SNGCE, Kadayiruppu.63 | P a g e

Engineering Mechanics C104
What happens to the hole in the center of the plate - expands, stays the same, or shrinks?
When I ask this question in my classroom it is not unusual for the majority of the answers to be incorrect. Our first thought often is that since the plate is expanding, the hole is the center must be getting smaller. However, this is not the case. The atoms/molecules all move away from each other with the result that the hole expands just as if it were made of the same material as the plate. This is also true of volume expansion. The inside volume of a glass bottle expands as if it were made of glass.
A somewhat more interesting aspect of thermal expansion is when it "can't" - that is, what happens when we constrain a structure or member so it can not expand. (or contract)? When this happens a force and resulting stress develop in the structure. A simple way to determine the amount of stress is to let the material expand freely due to thermal expansion, and then compress it back to its original length (a mechanical deformation) . See diagram below.
If we equate these two effects (deformations) we have: = FL/EA ;note that we can cancel the length L from each side of the equation, and then cross multiply by E, arriving at: = F/A , however, F/A is stress and we can finally write:
; The thermal stress which develops if a structure or member is completely constrained (not allowed to move at all) is the product of the coefficient of linear expansion and the temperature change and Young's modulus for the material.
Civil Engineering Department, SNGCE, Kadayiruppu.64 | P a g e

Engineering Mechanics C104
Young Modulus
Instead of drawing a force - extension graph, if you plot stress against strain for an object showing (linear) elastic behaviour, you get a straight line.
This is because stress is proportional to strain. The gradient of the straight-line graph is the Young's modulus, EE is constant and does not change for a given material. It in fact represents 'stiffness' property of the material. Values of the young modulus of different materials are often listed in the form of a table in reference books so scientists and engineers can look them up.
Units of the Young modulus E: Nm-2 or Pa.
E is constant and does not change for a given material, no matter what the size of the sample we test. It can be considered as a property of the material. The value of E reflects the stiffness of the material. Stiffer materials have higher values of E. Young's modulus values of different materials are often listed in the form of a table in reference books so scientists and engineers can look them up.
Units of the Young modulus E: Nm-2 or Pa.
Note: The value of E in Pa can turn out to be a very large number. It is for this reason that, some times the value of E may be given MNm-2.
Note: Because 'stress' and 'strain' are (uniquely) related to force and extension, it is not surprising that the two graphs, stress v/s strain and force v extension, have similar shapes and characteristics.
Experimental Determination of stress-strain graph and E
We can experimentally determine the value of E by choosing a specimen of the material in a convenient shape and form. For example, it is easier to deal with a specimen in the form of a long, thin wire for determining the value of Young's modulus of a metal. In principle we can apply different forces to a wire by hanging different weights on it and measure the extension of the wire for the magnitudes of the force applied to draw a stress Civil Engineering Department, SNGCE, Kadayiruppu.
65 | P a g e

Engineering Mechanics C104
strain graph. We have already noted that strain is a small number so it needs to be measured more accurately
We actually use two wires of equal lengths attached to a rigid support. Although the support is rigid it to can 'give' slightly under the forces applied. This can affect results. By using two wires, spurious strain can be eliminated from the measurements. One wire acts as a control wire. We can accurately measure extension of the other (test) wire. Both control and test wires are attached to the other ends by a horizontal bar supporting a spirit level. The bar is hinged to the control wire so that when the test wire is extended due to the addition of weights on the side of the test wire, the spirit level is tilted by a small amount. We can remove any tilt of the spirit level and restore it to the horizontal position by turning the screw of a micrometer, which is positioned on the test wire side and making the bar mounted spirit level travel in the desired direction.
Caution: It is possible that a wire under tension can snap suddenly and damage eyes. Wear safety glasses. It is also possible that weights attached to the wires could fall down and land on your feet or other part of the body.
Experimental determination consists of the following steps:
Step 1: Attach equal weights both wires to make them equally taut.Civil Engineering Department, SNGCE, Kadayiruppu.
66 | P a g e

Engineering Mechanics C104
Step 2: Measure the initial length of the wire several times to obtain the average value of lo
Step 3: Measure the diameter of the wire at several points along the wire and the average value of the diameter (d) and then calculate the circular cross-sectional area
From the formula:
A = (πd2)
Step 4:Adjust the spirit level so that it is in the horizontal position by turning the micrometer. Record the micrometer reading to use it as the reference reading.
Step 5:Load the test wire with a further weight. Wait while the wire is being stretched to the equilibrium position and the spirit level is maximally tilted.
Step 6: Adjust the micrometer screw to restore the spirit level into the horizontal position.
Step 7: Subtract the first micrometer reading from the second micrometer reading to obtain the extension (e) of the test wire.
Step 8: Calculate stress and strain from the formulae and
Step 9: Repeat steps 4,5,6 to obtain more values of stresses and strains
Step 10: Plot the above values on stress strain graph; it should be a straight line. Determine the value of the gradient E.
Worked example
A wire of length 2m and diameter 0.4mm is hung from the ceiling. Find the extension caused in the wire when a weight of 100N is hung on it. Young Modulus (E) for the wire is 2.0 x 1011 Pa.
Answer: e ~ 8 mm.
Stress - strain graph beyond elastic behaviour
In this 'Learn-it' so far, we have drawn stress-strain graphs for the elastic behaviour of a material. In the elastic region the stress-strain graph is a straight line. We can, however draw a stress strain graph beyond the elastic region. The graph, then becomes non-linear because Hooke's law is not obeyed and stress is not proportional to strain.
Civil Engineering Department, SNGCE, Kadayiruppu.67 | P a g e

Engineering Mechanics C104
Here are schematic stress-strain graphs of copper and glass.
Note: that both graphs end at points marked X. These points are called breaking points. A material physically breaks at its breaking point. The stress at the breaking point is called the breaking stress of the material. Breaking stress of a material, in principle, is related to the energy required to break internal bonds between the atoms or the molecules of the material. It is very important for designers and engineers to know the value of the breaking stress for the materials they use.
This diagram schematically shows the stress strain curve of rubber. It is different from the other two stress-strain graphs, above, in the following respects:
Civil Engineering Department, SNGCE, Kadayiruppu.68 | P a g e

Engineering Mechanics C104
Within the range of the stress and strain of the graph, rubber undergoes high strains (extension) without breaking. For example, one kind of rubber (polyisoprene) can be stretched ~500% without breaking Although, rubber on loading returns to its original length (zero extension), the stress-strain graph has two branches (generated by loading up stress and unloading stress). The loop formed by the two branches is called hysteresis loop. It actually represents the fact that rubber is not a very good material for storing energy. In one loading and unloading cycle the strain energy, represented by the area bound by the hysteresis loop is lost and eventually dissipated as heat.
Stress and Strain
Energy in stress-strain graphs
Evaluation of strain energy from stress - strain graph
We know that when a material behaves elastically, the work done on straining it is stored as energy in it. We call this (elastic) strain energy. We can derive the strain energy density (ρe) in a material by calculating the area under its stress - strain graph. The definition of the density of energy is analogous to the definition of the density of mass. It is the energy stored per unit volume (how many joules are stored in 1m3 of the material).
Where:
F is the applied force,
e is extension obtained at force F,
A is the area of the cross section of the object and
l is the length of the object
With the knowledge of ρε we can calculate the total energy stored in an object (i.e. that given by the area under the force - extension graph) if we know the volume of the object.
We can demonstrate this by calculating the work done per unit volume from the total work (W) done on the object derived from the force - extension graph.
Work done per unit volume = total work done/ total volume
Civil Engineering Department, SNGCE, Kadayiruppu.69 | P a g e

Engineering Mechanics C104
V =
But V = Al
Work done per unit volume =
Worked Example
A mass of 200N is hung from the lower end of a steel wire hanging from the ceiling of the laboratory. The length of the wire 5m, its diameter is 1mm, Young's modulus is: 2 x 1011 Nm-2. Calculate the strain energy density of the wire and the total energy stored in it.
Apply the formulae for strain density and total work done
F = 200N
d = 1mm = 1 x 10-3m
A = ¼ (πd2) = 0.785 x 10-6m2
l = 5m
Strain energy density =1.62 x105Jm-3
Total strain energy stored = 0.637 J
Civil Engineering Department, SNGCE, Kadayiruppu.70 | P a g e

Engineering Mechanics C104
MODULE IV
Kinematics
Basics
Time..The absolute measure of the orderly succession of events. Unit of time is the second
Particle..a body is assumed with negligible dimensions Rigid body..A body with all internal points fixed relative to each other
Civil Engineering Department, SNGCE, Kadayiruppu.71 | P a g e

Engineering Mechanics C104
Nomenclature
s = distance travelled in time -(m) v = average velocity - (m/s) a = acceleration - (m/s2) t = time - (s) u = initial velocity - (m/s) v = final velocity - (m/s) θ = Rotation angle - (radians) ω 1 = Initial angular velocity -rads/s ω 2 = final angular velocity - rads /s n = angular speed revs/min α = Angular Acceleration rads/s 2
Particle
This discipline of mechanics deals with the displacement of particles over time without reference to the forces that cause the motion, velocity and acceleration of the particle.
Linear Motion..
Considering a particle moving along a path is space from position A to position B over a time interval. The position vector r locates the particle relative to the reference frame (say cartesian xyz) . The distance the particle moves along the path is designated s. The change in position of the particle over the time is its linear displacement and is identified by the vector
( r B - r A )
The speed of the particle over a time period = (s 2 - s 1 ) /(t 2 - t 1 ) = the speed ofthe particle
As the time interval reduces to zero the change in position
Δ r /Δ t = ( rB - rA ) / (t2 - t1 ) => dr/dt = v = the instantaneous velocity. The instantaneous velocity is tangential to the particle path
The derivative (with respect to time) of the instantaneous velocity is d 2r /dt 2
= the instantaneous acceleration.
Textbook formulae..Linear motion subject to uniform acceleration.
Civil Engineering Department, SNGCE, Kadayiruppu.72 | P a g e

Engineering Mechanics C104
v = u + at
s = ut + a.t2 /2
s = (u + v) /2
v 2 = u 2 + 2.a.s
Using vector algebra....
As an example of straight line motion consider a particle moving with a constant acceleration in the x direction.
C1 is a constant determined from the velocity at t = 0:Normally assuming initial velocity = u then C1 = u
C2 is a constant determined from the displacement at t = 0:Normally assuming initial displacement = 0 then C2 = 0
Angular Motion..
A point rotates from A to B around a center C through a small angle θ in a time t . As the time interval approaches zero the instantaneous angular velocity d θ /dt = ω . This angular velocity is a vector cross product and is shown in the direction as indicated below..
The velocity of the point is obtained as a vector product of the angular velocity and the radius
v = ω x r
Angular velocity vectors are free vectors but they are not commutative..
Civil Engineering Department, SNGCE, Kadayiruppu.73 | P a g e

Engineering Mechanics C104
Textbook formulae.. Angular motion subject to uniform acceleration
ω = 2.π .n /60
ω 2 = ω 1 + α . t
θ = ( ω 2 + ω 1 ) . t /2
ω 22 = ω 1
2 + 2 . α . s
θ= ω 12 + α . t 2 /2
Motion in a circle..
A particle moving in a circle of radius (r) at a constant velocity (v) and constant angular velocity of ω = v /r is accelerating towards the centre of the circle at a constant rate of v 2 /r = ω 2 . r. The acceleration is primarily due to the rate of change of angular position of the particle...
An example of linear motion is that of a particle moving at a fixed velocity in a circular motion..
Differentiate with respect to time
Differentiate again with respect to time using ( d(uv) = u.dv + v du )
Relating the Tangential velocity to the x an y velocity.
Introducing velocity into equation
Civil Engineering Department, SNGCE, Kadayiruppu.74 | P a g e

Engineering Mechanics C104
Finally establishing formula for accelaration
Linear and angular velocity
Velocity (also called linear velocity) and angular velocity are measured with respect to a frame of reference.
The linear velocity of a rigid body is a vector quantity, equal to the time rate of change of its linear position. Thus, it is the velocity of a reference point fixed to the body. During purely translational motion (motion with no rotation), all points on a rigid body move with the same velocity. However, when motion involves rotation, the instantaneous velocity of any two points on the body will generally not be the same. Two points of a rotating body will have the same instantaneous velocity only if and when they happen to lay on an axis parallel to the instantaneous axis of rotation.
Angular velocity is a vector quantity that describes the angular speed at which the orientation of the rigid body is changing and the instantaneous axis about which it is rotating. All points on a rigid body experience the same angular velocity at all times. During purely rotational motion, all points on the body change position except for those lying on the instantaneous axis of rotation. The relationship between orientation and angular velocity is not directly analogous to the relationship between position and velocity. Angular velocity is not the time rate of change of orientation, because there is no such concept as an orientation vector that can be differentiated to obtain the angular
Angular acceleration is the rate of change of angular velocity over time. In SI units, it is measured in radians per second squared (rad/s2), and is usually denoted by the Greek letter alpha ().
Mathematical definition
The angular acceleration can be defined as either:
where ω is the angular velocity, is the linear tangential acceleration, and r is the radius of curvature.
Civil Engineering Department, SNGCE, Kadayiruppu.75 | P a g e

Engineering Mechanics C104
Constant acceleration
For all constant values of the torque, τ, of an object, the angular acceleration will also be constant. For this special case of constant angular acceleration, the above equation will produce a definitive, constant value for the angular acceleration:
Non-constant acceleration
For any non-constant torque, the angular acceleration of an object will change with time. The equation becomes a differential equation instead of a constant value. This differential equation is known as the equation of motion of the system and can completely describe the motion of the object.
Absolute and relative motion..
Civil Engineering Department, SNGCE, Kadayiruppu.76 | P a g e

Engineering Mechanics C104
A reference frame can be fixed or relative.In Newtonian mechanics the fixed reference frame is the primary inertial system in which there is zero absolute motion in space. This is entirely impractical because it would have to take into account the movements of the earth relative to the sun and the sun in the universe etc. A reference frame based on the sun is called a Heliocentric reference frame and this again is impractical for normal mechanical engineering. A practical reference frame is one based on the earth. This is called a geocentric reference frame and is sufficient as an inertial frame for normal engineering. Therefore when we identify the velocity of a vehicle or the acceleration of an object they are generally relative to the earths motion.
When an object is moving relative to a fixed reference frame it is called absolute motion.When it is moving relative to a reference frame that is moving it is called relative motion.An example of relative motion is someone moving in a travelling train or car.
Rotating unit vector
Consider a rotating unit vector e..
Vector of Point in a rotating reference frame
A point P with a vector position r is moving in the xy plane. The position of this vector is identified in respect to unit vectors e 1 and e 2 fixed to a reference frame rotating at and angular velocity ω .. r 1 and r 2 are components of the motion in the e 1 and e 2 directions.
The position is expressed as follows..
The derivative of this equation with respect to time results in.
It is shown above that de/dt = ω x e therefore
Rewriting the equation
Velocity of a point in a moving reference frame
Civil Engineering Department, SNGCE, Kadayiruppu.77 | P a g e

Engineering Mechanics C104
A point P moving in the xy frame as shown below has a position vector of
r p = r o' + r
ro' locates O' relative to the fixed xy axes and r locates the point P relative to a axes (x 1,x 2)
If the moving frame is not rotating ω = 0
Acceleration of a Particle
Differentiating (with respect to time) the equation for velocity (v) results the equation for accelaration (a)
Following the principles established above...
Note : The term ..... ..... is called the coriolis acceleration .This represents the difference between the acceleration of P relative to O' as measured from the rotating and the non-rotating axes.
Rigid Body Kinematics in one plane.
Rigid body..A body with all internal points fixed relative to each other.Three co-ordinates are required to determine the position and orientation of a body in plane motion. A rigid body has three degrees of free in plane motion.Definitions..
Rectilinear Translation...All point on a rigid body move in a straight line Curvilinear Translation... The orientation of all points in a rigid body remain fixed
while the body moves along a curved path Rotation about a fixed line.. All points in a rigid body move in a circular motion
about a fixed line
Plane motion...Each point in rigid body moves in a path parallel to a fixed plane
Plane motion for a rigid body can be easily developed from the equations for motion of a particle.They are the same equations for the motion of a point
Civil Engineering Department, SNGCE, Kadayiruppu.78 | P a g e

Engineering Mechanics C104
but as all points are fixed relative to each other the term involving velocities and accelerations of points relative to each other are zero.
The equations for velocity and acceleration when the reference axes x',y' are fixed to the rigid body ,are as follows...
Important Note:
It can be easily proved that whichever position on the rigid body is selected for the reference position O' the angular velocity and angular acceleration vectors are not changed.
Instantaneous Centre of Rotation
For any body moving in space the motion can be defined from the position, velocity, acceleration of any point on the body with the angular velocity and acceleration.There is a point for this body for which the instantaneous translational velocity is zero i.e only rotation of the body about the point is occuring.This point is called the instantaneous center of rotation and its location relative to the body is dependent on the relative values of the linear and angular velocities For near zero angular velocities (near translation motion) the location is at near infinity.
The location of the instantaneous centre of rotation is easy to locate if the velocity and angular velocity of a point are known
If the location of a point and its velocity and angular velocity are known.Considering point A the point C is on a line passing through A normal to the direction of the velocity. rA = VA / ω
If the location of two points and their velocities The point C is at the intersection of the lines drawn normal to the velocities of each of the points.If the lines are co-incident then radius is established by geometry.. AC = AB.(VA) /(VA-VB)
Civil Engineering Department, SNGCE, Kadayiruppu.79 | P a g e

Engineering Mechanics C104
Rigid Body kinematics in 3 Dimensions
Introduction
A particle requires three points to specify its position relative to the selected coordinate system and is therefore identified as having 3 degrees of freedom .For a rigid body the location of three separate points of the body relative to the selected co-ordinate system are requiredBecause the points are fixed relative to each other only six independent co-ordinates are required to locate the body is space and a unrestrained rigid body is therefore said to have six degrees of freedom e.g. A rigid body may be positioned by locating the position of one point of the body ( 3 co-ordinates), then positioning a line on the body (2 co-ordinates) and finally identifying a rotation about the line (1 co-odinates).This sums up to 6 co-ordinates
The motion of a rigid body in three dimension can have a number of modes..
Rectilinear Translation...All points on the rigid body move in a straight line Curvilinear Translation... The orientation of all points in a rigid body remain fixed
while the body moves along a curved path Rotation about a fixed axis.. All points in a rigid body move in a circular motion
about a fixed axis Rotation about a fixed point.. All points in a rigid body move in a circular motion
about a fixed point General motion...The rigid body motion includes translation and rotation about
Rotation Notes.
If a rigid body is rotated from a position "A" through an angle of π/2 about the x axis and then rotated π/2 about the y axis it has been moved to a certain position "B".If the same rigid body is rotated from a position "A" through and an angle of π/2 about the y axis and then is rotated π/2 about the x axis it has been moved to a position "C" which is not the same as "B".Finite rotation does not obey the laws of vector addition
Euler & Chasles;'s Theorems
Euler's Theorem
If a point on a rigid body does not change its position then any series of successive rotations can be compounded to a rotation about a single axis
Civil Engineering Department, SNGCE, Kadayiruppu.80 | P a g e

Engineering Mechanics C104
Chasles's Theorem
Any displacement of a rigid body may be compounded from a single rotation about any selected point plus a translation of that point.
A third theorem ( Poinsot's Central axis theorem) is also provide..
Any finite displacement of a rigid body may be reduced to a single rotation about an axis plus a translation parallel to the same axis. This theorem only relates the displacement and not to the paths taken by points.
These theoerems can be applied to angular velocities
Any motion of a rigid body can be described by a single angular velocity plus a translational velocity parallel to the angular velocity vector.
Any motion of a body about a point may be represented by a single angular velocity about an axis through that point.
Any motion of a rigid body my be represented by the velocity of a point plus the angular velocity about an axis passing through the points...
Rectilinear Translation.& Curvilinear Translation
All points on the body will move in parallel straight or curve lines. There is no relative velocity or acceleration between any points on the body.
Position... r P = r Q + r PQ
Velocity...v P = v Q + v PQ
Acceleration...a P = a Q + a PQ
Civil Engineering Department, SNGCE, Kadayiruppu.81 | P a g e

Engineering Mechanics C104
Rotation about a fixed axis.
Rotation of a rigid body about fixed axis is shown in the diagram. The vector of the rotary motion has sense and direction in accordance with the right hand rule which is fixed along the direction of the axis. There is zero velocity due to rotation at the axis.
Rotation about a fixed Point.
Rotation of a rigid body about a fixed point can always be reduced to rotation of a body about an instantaneous axis of rotation.
Considering for example a rigid body (cone) which is rotating about a horizontal axis (shaft),angular velocity = ω1,and the shaft is itself rotating about a vertical axis, angular velocity = ω2
If ω2 = 0 then the axis rotation is the centre line of the shaft and the velocity of any point on the shaft is proportional to the radius (max = r)from the shaft.If the rotation about the vertical axis is increased to a certain value the the velocity of the shaft axis is proportional to ω2 x the shaft length (max = l) from the axis (radius). If the two angular velocities are the same and the radius of the cone r = l then at any instant the velocity of top surface of the cone is zero. i.e the top surface is the instantaneous axis of rotation.
This grossly simplified representation illustrates the principle .. if ω2 is increased the body cone representing the path of the instantaneous axis of rotation will obviously be larger than the actual surface of the cone.
For the model illustrated there is also a space cone which is the path the instantaneous axis or rotation follows in space- (an inverted cone centered the vertical axis )..
For the example above the instantaneous angular velocity of the cone =
ω = ω1 + ω2 = ω1i + ω2j
In the real world the motions and shapes are not as shown but the interaction between the body rotation on its axis and its angular motion is space still results in an instantaneous axis of rotation between a instantaneous body cone and an instantaneous space cone. The body cone may rotate outside or inside the space cone
One determining the instantaneous angular velocity the angular acceleration α is tangential to the contact point of the two cones as shown. The velocity and acceleration at any point is simply determined as shown below
Civil Engineering Department, SNGCE, Kadayiruppu.82 | P a g e

Engineering Mechanics C104
General Motion.
The general case of 3D motion of rigid bodies reduces to translation + rotation about a fixed axis.This is basically a generalisation of the theorems provided above.
For a body possessing linear plus angular motion it is often not possible to have an instantaneous axis of rotation because all points may have non-zero velocities. The most convenient method of kinematic analysis of rigid bodies in space 3 dimensions is by using the principles of relative motion. The primary (absolute)reference system XYZ are supplemented with a reference system(xyz) attached to some point on the rigid body.
The attached reference system may be a translating one or a rotating one.
Translating reference systemThis motion simply develops the motions already studied in the previous section for particle motions and rigid body motions. The basic motion equations are :
r P = r Q + r PQ
v P = v Q + v PQ
a P = a Q + a PQ
The above equations are sufficient if the angular velocity ω is zero however if this is not the case the following equations for velocity and acceleration are more definitive;
Rotating reference system
A more general form of the relative reference axis method uses rotating reference axes.The reference axes xyz are rotating with an angular velocity of Ω. The rigid body has a rotation velocity ω as before.
The basic motion equations are as aboveThe expression for velocity and acceleration of point P are provided below.The derivation is a simple extension of that provided above for 2 Dimensional motion with a rotating relative axis with the third dimension (z) added.
v r and a r = are the velocity and acceleration of P relative to the rotating xyz axis.
Civil Engineering Department, SNGCE, Kadayiruppu.83 | P a g e

Engineering Mechanics C104
Note:The equations above are based on the general case of the angular velocity of the rigid body (ω)is different to the angular velocity of the axis ( Ω).
Relative Motion
The laws of physics which apply when you are at rest on the earth also apply when you are in any reference frame which is moving at a constant velocity with respect to the earth. For example, you can toss and catch a ball in a moving bus if the motion is in a straight line at constant speed.
The motion may have a different appearance as viewed from a different reference frame, but this can be explained by including the relative velocity of the reference frame in the description of the motion.
Relative Velocity
One must take into account relative velocities to describe the motion of an airplane in the wind or a boat in a current. Assessing velocities involves vector addition and a useful approach to such relative velocity problems is to think of one reference frame as an "intermediate" reference frame in the form:
Put into words, the velocity of A with respect to C is equal to the velocity of A with respect to B plus the velocity of B with respect to C. Reference frame B is the intermediate reference frame. This approach can be used with the airplane and boat examples.
Suppose that, on a windy day, an airplane moves with constant velocity with respect to the air, and that the air moves with constant velocity with respect to the ground. What is
Civil Engineering Department, SNGCE, Kadayiruppu.84 | P a g e

Engineering Mechanics C104
the vector velocity of the plane with respect to the ground? In principle, the answer to this question is very simple:
In other words, the velocity of the plane with respect to the ground is the vector sum of the plane's velocity relative to the air and the air's velocity relative to the ground. . Let us now consider how we might implement in practice.
As always, our first task is to set up a suitable Cartesian coordinate system. A convenient system for dealing with 2-dimensional motion parallel to the Earth's surface
The -axis points northward, whereas the -axis points eastward. In this coordinate system, it is conventional to specify a vector in term of its magnitude, , and its compass bearing, . As illustrated in figure below a compass bearing is the angle subtended between the direction of a vector and the direction to the North pole: i.e., the -direction.
Civil Engineering Department, SNGCE, Kadayiruppu.85 | P a g e

Engineering Mechanics C104
By convention, compass bearings run from to . Furthermore, the compass bearings of North, East, South, and West are and , respectively.
MODULE V
Force
A force is that which can cause an object with mass to accelerate. Force has both magnitude and direction, making it a vector quantity. According to Newton's second law, an object with constant mass will accelerate in proportion to the net force acting upon it and in inverse proportion to its mass. An equivalent formulation is that the net force on an object is equal to the rate of change of momentum it experiences. Forces acting on three-dimensional objects may also cause them to rotate or deform, or result in a change in pressure. The tendency of a force to cause angular acceleration about an axis is termed torque. Deformation and pressure are the result of stress forces within an object.
Since antiquity, scientists have used the concept of force in the study of stationary and moving objects. These studies culminated with the descriptions made by the third century BC philosopher Archimedes of how simple machines functioned. The rules Archimedes determined for how forces interact in simple machines are still a part of physics. Earlier descriptions of forces by Aristotle incorporated fundamental misunderstandings which would not be corrected until the seventeenth century by Isaac Newton. Newtonian descriptions of forces remained unchanged for nearly three hundred years.
Newton's laws of motion
Newton's laws of motion are three physical laws that form the basis for classical mechanics, directly relating the forces acting on a body to the motion of the body. They Civil Engineering Department, SNGCE, Kadayiruppu.
86 | P a g e

Engineering Mechanics C104
were first compiled by Sir Isaac Newton in his work Philosophiae Naturalis Principia Mathematica, first published on July 5, 1687.Newton used them to explain and investigate the motion of many physical objects and systems. For example, in the third volume of the text, Newton showed that these laws of motion, combined with his law of universal gravitation, explained Kepler's laws of planetary motion.
First law There exists a set of inertial reference frames relative to which all particles with no net force acting on them will move without change in their velocity. This law is often simplified as "A body persists its state of rest or of uniform motion unless acted upon by an external unbalanced force." Newton's first law is often referred to as the law of inertia.
Second law Observed from an inertial reference frame, the net force on a particle of constant mass is proportional to the time rate of change of its linear momentum: F = d(mv)/dt. This law is often stated as, "Force equals mass times acceleration (F = ma)": the net force on an object is equal to the mass of the object multiplied by its acceleration.
Third law Whenever a particle A exerts a force on another particle B, B simultaneously exerts a force on A with the same magnitude in the opposite direction. The strong form of the law further postulates that these two forces act along the same line. This law is often simplified into the sentence, "To every action there is an equal and opposite reaction."
In the given interpretation mass, acceleration, momentum, and (most importantly) force are assumed to be externally defined quantities. This is the most common, but not the only interpretation: one can consider the laws to be a definition of these quantities. Notice that the second law only holds when the observation is made from an inertial reference frame, and since an inertial reference frame is defined by the first law, asking a proof of the first law from the second law is a logical fallacy. At speeds approaching the speed of light the effects of special relativity must be taken into account.
Impulse
The term impulse is closely related to the second law, and historically speaking is closer to the original meaning of the law. The meaning of an impulse is as follows:
An impulse occurs when a force F acts over an interval of time Δt and is given by .
The words motive force were used by Newton to describe "impulse" and motion to describe momentum; consequently, a historically closer reading of the second law describes the relation between impulse and change of momentum. That is, a mathematical
Civil Engineering Department, SNGCE, Kadayiruppu.87 | P a g e

Engineering Mechanics C104
rendering of the original wording resembles a finite difference version of the second law, such as
where I is the impulse, Δp is the change in momentum, m is the mass, and Δv is the change in velocity.
The analysis of collisions and impacts uses the impulse concept.
forces were first quantitatively investigated in conditions of static equilibrium where several forces canceled each other out. Such experiments demonstrate the crucial properties that forces are additive vector quantities: they have magnitude and direction. When two forces act on an object, the resulting force, the resultant, can be determined by following the parallelogram rule of vector addition: the addition of two vectors represented by sides of a parallelogram, gives an equivalent resultant vector which is equal in magnitude and direction to the transversal of the parallelogram.. The magnitude of the resultant varies from the difference of the magnitudes of the two forces to their sum, depending on the angle between their lines of action.
Consider a block of mass which is suspended from a fixed beam by means of a string, as shown in Figure below.. The string is assumed to be light (i.e., its mass is negligible compared to that of the block) and inextensible (i.e., its length increases by a negligible amount because of the weight of the block). The string is clearly being stretched, since it is being pulled at both ends by the block and the beam. Furthermore, the string must be being pulled by oppositely directed forces of the same magnitude, otherwise it would accelerate greatly (given that it has negligible inertia). By Newton's third law, the string exerts oppositely directed forces of equal magnitude, on both the block and the beam. These forces act so as to oppose the stretching of the string: i.e., the beam experiences a downward force of magnitude , whereas the block experiences an upward force of magnitude . Here, is termed the tension of the string. Since is a force, it is measured in newtons. Note that, unlike a coiled spring, a string can never possess a negative tension, since this would imply that the string is trying to push its supports apart, rather than pull them together.
Civil Engineering Department, SNGCE, Kadayiruppu.88 | P a g e

Engineering Mechanics C104
Let us apply Newton's second law to the block. The mass of the block is , and its acceleration is zero, since the block is assumed to be in equilibrium. The block is subject to two forces, a downward force due to gravity, and an upward force due to the tension of the string. It follows that
In other words, in equilibrium, the tension of the string equals the weight of the block.
Figure shows a slightly more complicated example in which a block of mass is suspended by three strings. The question is what are the tensions, and , in these strings, assuming that the block is in equilibrium? Using analogous arguments to the previous case, we can easily demonstrate that the tension in the lowermost string is . The tensions in the two uppermost strings are obtained by applying Newton's second law of motion to the knot where all three strings meet. See Fig.
There are three forces acting on the knot: the downward force due to the tension in the lower string, and the forces and due to the tensions in the upper strings. The latter two forces act along their respective strings, as indicate in the diagram. Since the knot is in equilibrium, the vector sum of all the forces acting on it must be zero.
Consider the horizontal components of the forces acting on the knot. Let components acting to the right be positive, and vice versa. The horizontal component of tension is zero, since this tension acts straight down. The horizontal component of tension is , since this force subtends an angle of with respect to the horizontal Likewise, the horizontal component of tension is . Since the knot does not accelerate in the horizontal direction, we can equate the sum of these components to zero:
Civil Engineering Department, SNGCE, Kadayiruppu.89 | P a g e

Engineering Mechanics C104
(98)
Consider the vertical components of the forces acting on the knot. Let components acting upward be positive, and vice versa. The vertical component of tension is , since this tension acts straight down. The vertical component of tension is , since this force subtends an angle of with respect to the horizontal Likewise, the vertical component of tension is . Since the knot does not accelerate in the vertical direction, we can equate the sum of these components to zero:
Civil Engineering Department, SNGCE, Kadayiruppu.90 | P a g e

Engineering Mechanics C104
Consider a block of mass sliding down a smooth frictionless incline which subtends an angle to the horizontal, as shown in Figure below
Civil Engineering Department, SNGCE, Kadayiruppu.91 | P a g e

Engineering Mechanics C104
The weight of the block is directed vertically downwards. However, this force can be resolved into components , acting perpendicular (or normal) to the incline, and , acting parallel to the incline. Note that the reaction of the incline to the weight of the block acts normal to the incline, and only matches the normal component of the weight: i.e., it is of magnitude . This is a general result: the reaction of any unyielding surface is always locally normal to that surface, directed outwards (away from the surface), and matches the normal component of any inward force applied to the surface. The block is clearly in equilibrium in the direction normal to the incline, since the normal component of the block's weight is balanced by the reaction of the incline. However, the block is subject to the unbalanced force in the direction parallel to the incline, and, therefore, accelerates down the slope. Applying Newton's second law to this problem (with the coordinates shown in the figure), we obtain
Civil Engineering Department, SNGCE, Kadayiruppu.92 | P a g e

Engineering Mechanics C104
which can be solved to give In other words, the block accelerates down the slope with acceleration . Note that this acceleration is less than the full acceleration due to gravity, . In fact, if the incline is fairly gentle (i.e., if is small) then the acceleration of the block can be made much less than . This was the technique used by Galileo in his pioneering studies of motion under gravity--by diluting the acceleration due to gravity, using inclined planes, he was able to obtain motion sufficiently slow for him to make accurate measurements using the crude time-keeping devices available in the 17th Century.
Consider two masses, and , connected by a light inextensible string. Suppose that the first mass slides over a smooth, frictionless, horizontal table, whilst the second is suspended over the edge of the table by means of a light frictionless pulley. See Fig.
Civil Engineering Department, SNGCE, Kadayiruppu.93 | P a g e

Engineering Mechanics C104
Since the pulley is light, we can neglect its rotational inertia in our analysis. Moreover, no force is required to turn a frictionless pulley, so we can assume that the tension of the string is the same on either side of the pulley. Let us apply Newton's second law of motion to each mass in turn. The first mass is subject to a downward force , due to gravity. However, this force is completely canceled out by the upward reaction force due to the table. The mass is also subject to a horizontal force , due to the tension in the string, which causes it to move rightwards with acceleration
The second mass is subject to a downward force , due to gravity, plus an upward force due to the tension in the string. These forces cause the mass to move downwards with acceleration
Now, the rightward acceleration of the first mass must match the downward acceleration of the second, since the string which connects them is inextensible. Thus, equating the previous two expressions, we obtain
Civil Engineering Department, SNGCE, Kadayiruppu.94 | P a g e

Engineering Mechanics C104
Note that the acceleration of the two coupled masses is less than the full acceleration due to gravity, , since the first mass contributes to the inertia of the system, but does not contribute to the downward gravitational force which sets the system in motion.
Consider two masses, and , connected by a light inextensible string which is suspended from a light frictionless pulley, as shown in Fig.
Civil Engineering Department, SNGCE, Kadayiruppu.95 | P a g e

Engineering Mechanics C104
Let us again apply Newton's second law to each mass in turn. Without being given the values of and , we cannot determine beforehand which mass is going to move upwards. Let us assume that mass is going to move upwards: if we are wrong in this assumption then we will simply obtain a negative acceleration for this mass. The first mass is subject to an upward force , due to the tension in the string, and a downward force , due to gravity. These forces cause the mass to move upwards with acceleration
The second mass is subject to a downward force , due to gravity, and an upward force , due to the tension in the string. These forces cause the mass to move downward with acceleration
Now, the upward acceleration of the first mass must match the downward acceleration of the second, since they are connected by an inextensible string. Hence, equating the previous two expressions, we obtain
As expected, the first mass accelerates upward (i.e., ) if , and vice versa. Note that the acceleration of the system is less than the full acceleration due to gravity, , since both masses contribute to the inertia of the system, but their weights partially cancel one another out. In particular, if the two masses are almost equal then the acceleration of the system becomes very much less than .
Civil Engineering Department, SNGCE, Kadayiruppu.96 | P a g e
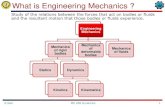
![Engineering Mechanics - DrChawin.com Engineering Mechanics I [Statics] Lecture 1 Page 1 of 12 Lecture 1: Introduction to Engineering Mechanics Engineering mechanics is the …](https://static.fdocuments.us/doc/165x107/5aa4d6047f8b9ab4788c63da/engineering-mechanics-engineering-mechanics-i-statics-lecture-1-page-1-of-12.jpg)





![I) - . - : =5.105 [30], =0.68810 [18]. - ), () (R). - .2 ...chembull.univer.kharkov.ua/archiv/2002_2/20.pdf · 164 [27,28], - [29]. 1. -- - , 298.15 c104, M 2 1 c104, M 2 1 c104,](https://static.fdocuments.us/doc/165x107/5f08040f7e708231d41fe84a/i-5105-30-068810-18-r-2-164-2728-29.jpg)









