
Bwb Pasi 2001 Mpc Workshop
12
MPC Workshop z There exists a MPC Toolbox available through Mathworks ¾ I do not use this! z My students write all of their own MPC code z This workshop is based on MATLAB code that I have written ¾ It is definitely NOT commercially quality code z Feel free to modify my code to fit your needes B. Wayne Bequette
-
Upload
aranyakchakravarty -
Category
Documents
-
view
225 -
download
0
Transcript of Bwb Pasi 2001 Mpc Workshop

7/29/2019 Bwb Pasi 2001 Mpc Workshop
http://slidepdf.com/reader/full/bwb-pasi-2001-mpc-workshop 1/12
MPC Workshop
z There exists a MPC Toolbox available through Mathworks
¾ I do not use this!
z My students write all of their own MPC code
z This workshop is based on MATLAB code that I have
written
¾ It is definitely NOT commercially quality code
z Feel free to modify my code to fit your needes
B. Wayne Bequette

7/29/2019 Bwb Pasi 2001 Mpc Workshop
http://slidepdf.com/reader/full/bwb-pasi-2001-mpc-workshop 2/12
MPC Workshop
z Primary MPC files
¾ QSSmpcNLPlant.m (QP, State Space MPC)
isim = 1 (DMC), isim = 2 (KF-based MPC) iqp = 1 (unconstrained), iqp = 2 (QP solution)
¾ KmatQSS.m (generates several matrices)
¾ qSSmpccalc.m (calculates control moves)
¾ planteqns.m (set of plant odes)
z Driver files
¾ r_FOmpc.m (first-order example)
FOodedev.m (planteqns = ‘FOodedev’)¾ r_VDV.m (linear van de vuuse example)

7/29/2019 Bwb Pasi 2001 Mpc Workshop
http://slidepdf.com/reader/full/bwb-pasi-2001-mpc-workshop 3/12

7/29/2019 Bwb Pasi 2001 Mpc Workshop
http://slidepdf.com/reader/full/bwb-pasi-2001-mpc-workshop 4/12
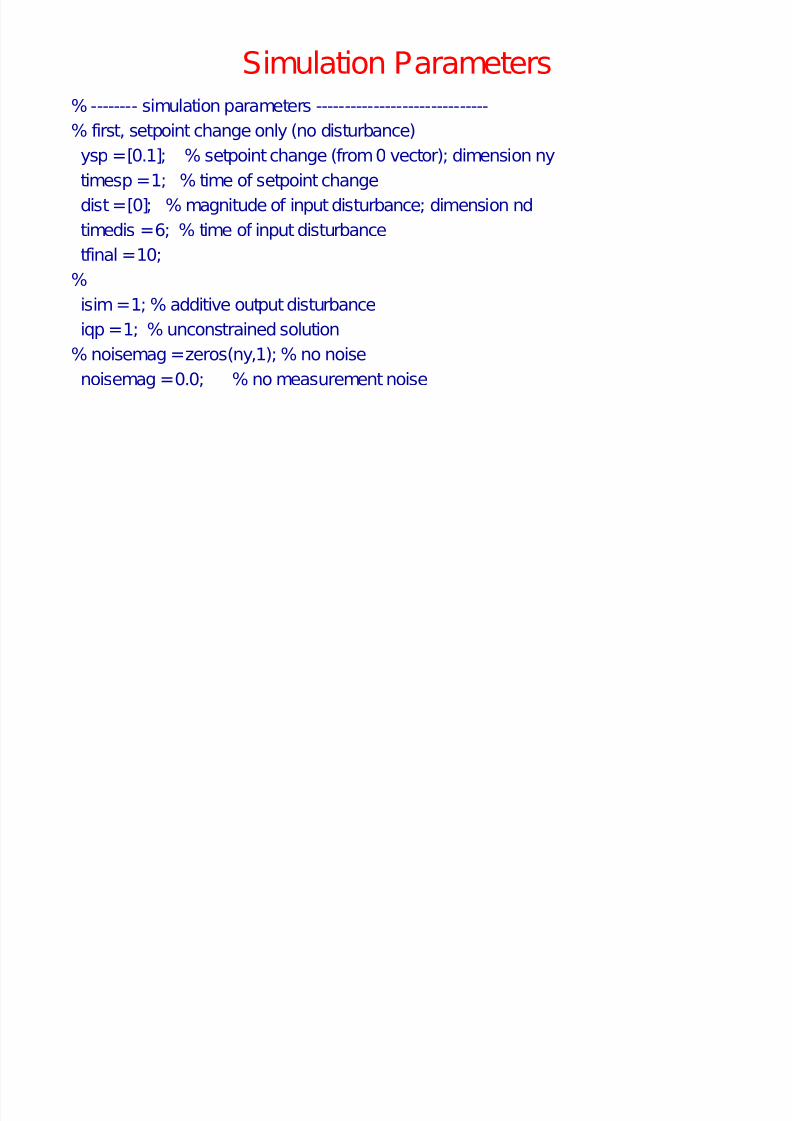
% discretize the model
delt= 0.2; % sample time = 0.2
sysd_mod = c2d(sysc_mod,delt);
[phi_mod,gamma_stuff,cd_mod,dd_stuff] = ssdata(sysd_mod)
%
gamma_mod = gamma_stuff(:,1); % first input is manipulated
gammad_mod = gamma_stuff(:,2); % second input is a disturbance
kk
kd
kkk
Cxy
duxx
=
Γ+Γ+Φ=+1
Continuous plant
% ------------ plant parameters -------------------------------
planteqns = 'FOodedev'
cplant= [1]; % the only state is also the output
nstates_p = 1; % one plant state
parvec(1) = 2; % the parameter is a time constant with value =2

7/29/2019 Bwb Pasi 2001 Mpc Workshop
http://slidepdf.com/reader/full/bwb-pasi-2001-mpc-workshop 5/12
Controller Parameters% ---------------- controller parameters -------------------
p = 10; % prediction horizon
m = 1; % control horizon
ny = 1; % number of measured outputs
nu = 1; % number of manipulated inputs
nd = 1; % number of actual disturbancesnd_est = 1; % number of estimated disturbances (used by KF)
weightu = [0]; % weighting matrix for control action
weighty = [1]; % weighting matrix for outputs
% -----------------constraints ------------------------------umin = [-1000];
umax = [1000];
dumin = [-1000];
dumax = [1000];% ------ Kalman Filter matrices -----------------------------
Q = 100*eye(nd_est,nd_est); % state covariance
R = eye(ny); % measurement noise covariance
%
7/29/2019 Bwb Pasi 2001 Mpc Workshop
http://slidepdf.com/reader/full/bwb-pasi-2001-mpc-workshop 6/12

7/29/2019 Bwb Pasi 2001 Mpc Workshop
http://slidepdf.com/reader/full/bwb-pasi-2001-mpc-workshop 7/12

7/29/2019 Bwb Pasi 2001 Mpc Workshop
http://slidepdf.com/reader/full/bwb-pasi-2001-mpc-workshop 8/12

7/29/2019 Bwb Pasi 2001 Mpc Workshop
http://slidepdf.com/reader/full/bwb-pasi-2001-mpc-workshop 9/12
7/29/2019 Bwb Pasi 2001 Mpc Workshop
http://slidepdf.com/reader/full/bwb-pasi-2001-mpc-workshop 10/12
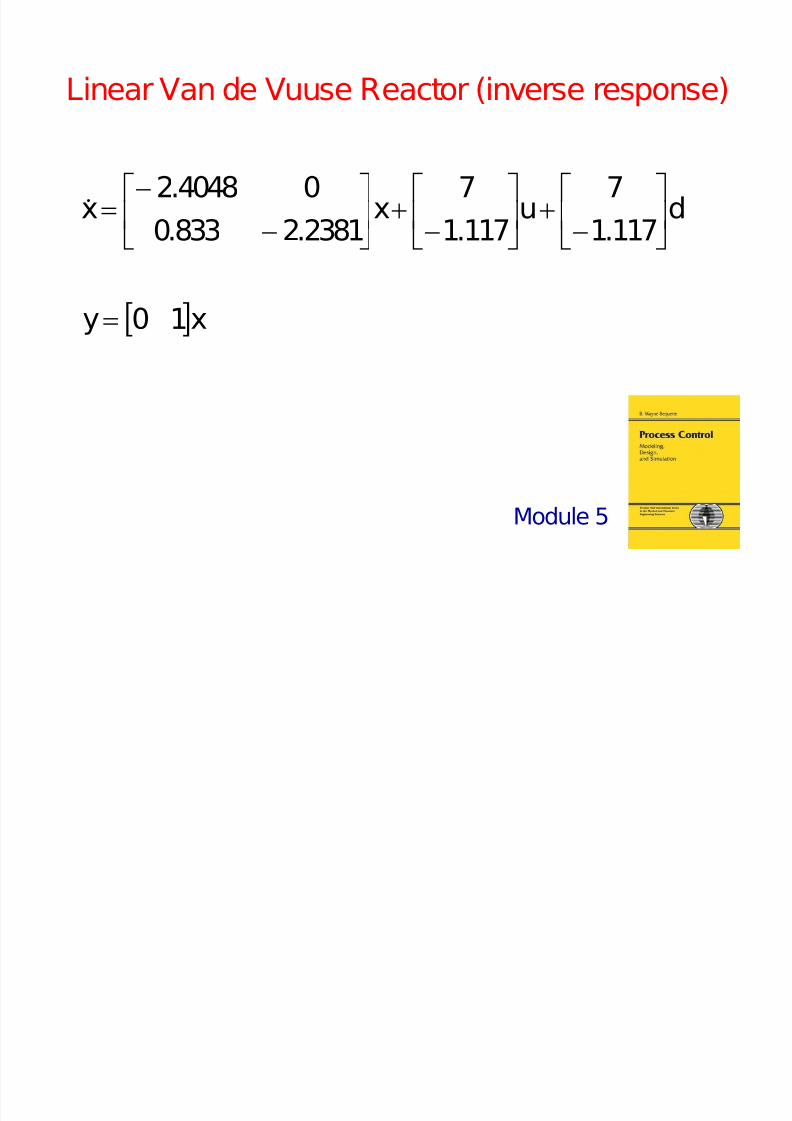
Linear Van de Vuuse Reactor (inverse response)
[ ]xy
duxx
10
117.1
7
117.1
7
2381.2833.0
04048.2
=
⎥⎦
⎤⎢⎣
⎡
−+⎥⎦
⎤⎢⎣
⎡
−+⎥⎦
⎤⎢⎣
⎡
−
−
=&
Module 5
7/29/2019 Bwb Pasi 2001 Mpc Workshop
http://slidepdf.com/reader/full/bwb-pasi-2001-mpc-workshop 11/12
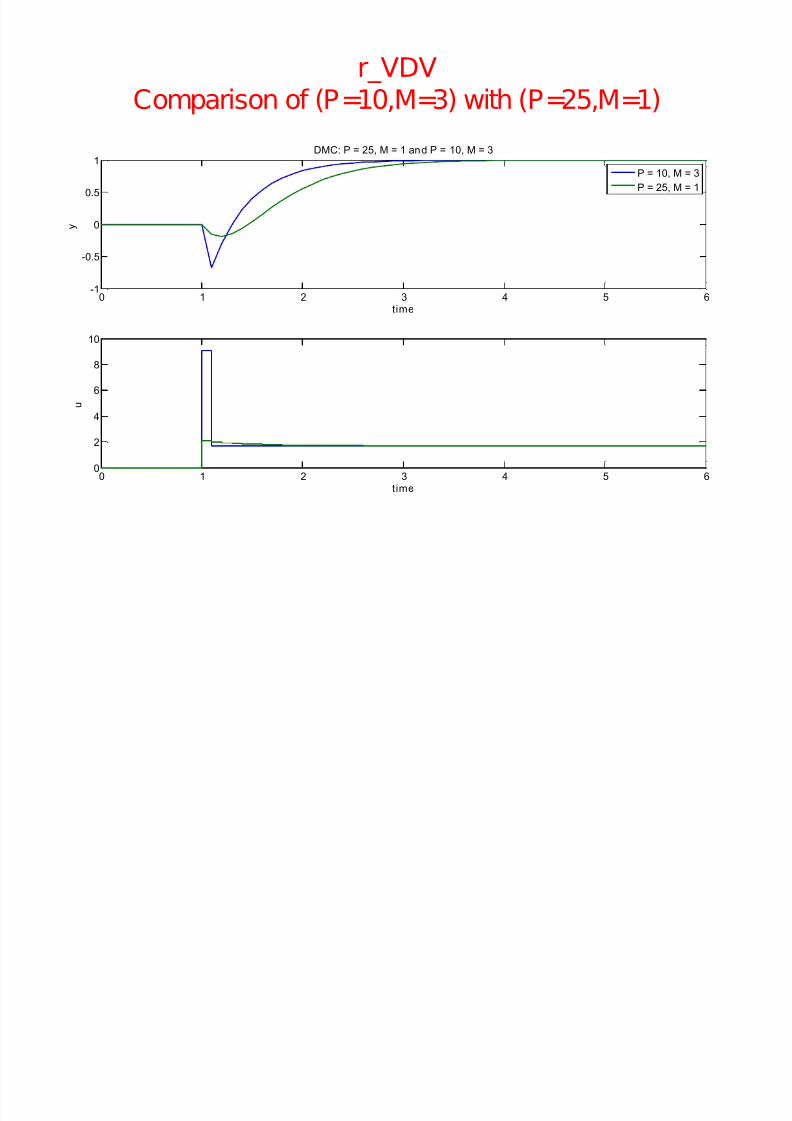
r_VDV
Comparison of (P=10,M=3) with (P=25,M=1)
0 1 2 3 4 5 6-1
-0.5
0
0.5
1
time
y
DMC: P = 25, M = 1 and P = 10, M = 3
0 1 2 3 4 5 60
2
4
6
8
10
u
time
P = 10, M = 3
P = 25, M = 1

7/29/2019 Bwb Pasi 2001 Mpc Workshop
http://slidepdf.com/reader/full/bwb-pasi-2001-mpc-workshop 12/12
0 1 2 3 4 5 6-1.5
-1
-0.5
0
0.5
1
1.5
time
y
DMC: P = 8, M = 1 and P = 7, M = 1
0 1 2 3 4 5 6
-6
-4
-2
0
2
u
time
P = 8, M = 1
P = 7, M = 1
r_VDVComparison of (P=8,M=1) with (P=7,M=1)


















