
BROWSE - Fera Science · 2014-11-13 · BROWSE . Bystanders, Residents, Operators and WorkerS...
156
Grant Agreement No: 265307 Project start date: 1 st January 2011 Project end date: 30 rd June 2014 BROWSE Bystanders, Residents, Operators and WorkerS Exposure models for plant protection products SEVENTH FRAMEWORK PROGRAMME Theme: Environment (including climate change) Technical report WP1.4: Operator exposure: Boom spraying, Mixing/loading, Orchard spraying and Hand Held Applications Title of Deliverable Technical report WP1: Operator exposure: boom spraying, mixing/loading , orchard spraying and hand held applications Deliverable number 1.4 Related WP and Tasks WP1 Type of Document Public Report Authors Partners WP1 Compiled by Henk Goede, Suzanne Spaan, Thies Oosterwijk, Neleida Marrufo, Agathi Charistou, Victoria Roelofs, Clare Butler-Ellis, Richard Glass, Kiki Machera, Marc Kennedy, Helen Owen, Dav Stott, Mark Fee, Andy Hart, Rianda Gerritsen-Ebben Date 31/10/2014 Project coordinator Dr Andy Hart Fera, United Kingdom E-mail: [email protected] http://www.browseproject.eu 1
Transcript of BROWSE - Fera Science · 2014-11-13 · BROWSE . Bystanders, Residents, Operators and WorkerS...

Grant Agreement No: 265307
Project start date: 1st January 2011
Project end date: 30rd June 2014
BROWSE Bystanders, Residents, Operators and WorkerS Exposure models for
plant protection products SEVENTH FRAMEWORK PROGRAMME
Theme: Environment (including climate change)
Technical report WP1.4: Operator exposure: Boom spraying, Mixing/loading, Orchard spraying and
Hand Held Applications
Title of Deliverable
Technical report WP1: Operator exposure: boom spraying, mixing/loading , orchard spraying and hand held applications
Deliverable number
1.4
Related WP and Tasks
WP1
Type of Document
Public Report
Authors Partners WP1 Compiled by Henk Goede, Suzanne Spaan, Thies Oosterwijk, Neleida Marrufo, Agathi Charistou,
Victoria Roelofs, Clare Butler-Ellis, Richard Glass, Kiki Machera, Marc Kennedy, Helen Owen, Dav Stott, Mark Fee, Andy Hart, Rianda Gerritsen-Ebben
Date 31/10/2014
Project coordinator Dr Andy Hart
Fera, United Kingdom E-mail: [email protected]
http://www.browseproject.eu
1

Table of Contents Abbreviations .......................................................................................................................................... 4
1 Introduction .................................................................................................................................... 5
2 Scope and Aim ................................................................................................................................. 6
3 BROWSE WP1 operator models ...................................................................................................... 7
3.1 User interface .................................................................................................................................. 7
3.2 Exposure models ............................................................................................................................. 7
3.2.1 Boom spraying inhalation model .................................................................................. 12
3.2.2 Boom spraying dermal model ....................................................................................... 26
3.2.3 Mixing and loading inhalation model ........................................................................... 37
3.2.4 Mixing and loading dermal models ............................................................................. 44
3.2.5 Orchard spraying inhalation model .............................................................................. 71
3.2.6 Orchard spraying dermal models .................................................................................. 79
3.2.7 Handheld Application inhalation model ....................................................................... 90
3.2.8 Handheld Application Dermal model ............................................................................ 95
3.3 Aggregated exposure .................................................................................................................. 130
3.3.1 External exposure ....................................................................................................... 130
3.3.2 Internal exposure ........................................................................................................ 133
3.4 Quality assurance and testing procedures .................................................................................. 137
4 Comparison with existing models ............................................................................................... 140
5 Model outcome interpretation and level of conservatism ......................................................... 141
5.1 Exposure outcomes ..................................................................................................................... 141
5.2 Routes and sources of exposure included .................................................................................. 141
5.3 Exposure scenarios included ....................................................................................................... 141
5.4 Population ................................................................................................................................... 142
5.5 Representativeness of model outcomes versus “real world” ..................................................... 142
2

5.6 Level of uncertainty and variability ............................................................................................. 142
5.7 Model comparison as indication for level of conservatism ........................................................ 143
5.8 Overall level of conservatism ...................................................................................................... 143
6 Conclusion ................................................................................................................................... 144
7 Recommendations for future development and refinement ..................................................... 146
8 References ................................................................................................................................... 148
3

Abbreviations
a.s. Active substance
ASE Airborne spray emission
AR Volume spray rate
BS Boom spraying
CTS Closed Transfer Systems
HHA Handheld application
LAI Leaf Index Area
ML Mixing & loading
MTD Mechanical Transfer Devices
PPE Personal protective Equipment
PPP Plant Protection Product
PPPs Plant Protection Products
RA Risk Assessment
RPE Respiratory Protective Equipment
SA Sensitivity analysis
4

1 Introduction
This document provides an overview of the operator models (WP 1) developed as part of the
Bystander, Resident, Operator and WorkerS (BROWSE) project. BROWSE is an EU 7th Framework
Programme and is scheduled from 2011 to mid 2014.
The main objectives of the project are to:
• Review, improve and extend the models currently used in risk assessment (RA) of Plant
Protection Products (PPPs) to evaluate the exposure of operators
• Development of new models for operator exposure scenarios
• Involve all relevant stakeholders and end users and take account of gender issues and regional
differences
The expected impact of the project is to contribute to the implementation of Regulation (EC)
1107/2009 and Dir. 2009/128/EC on the Sustainable Use of PPPs.
A Deliverable 1.1 was compiled to review existing models and data for operator exposure
(https://secure.fera.defra.gov.uk/browse/project/deliverables-&-reports.cfm). A common finding for
PPPs models is that they are based on outdated empirical data (non GLP and GLP) and only cover
limited scenarios. PPP models also derive surrogate exposure values using different percentiles and
using different normalisation parameters. Generally speaking, the models estimate external
inhalation as well as external dermal (potential and/or actual) exposures. A large variation in the use
of defaults for personal protective equipment is applied. Biocide and industrial chemicals models are
an exception, where probabilistic task-based models such as BEAT and ART are used.
It was concluded that more and reliable exposure data are required for modeling purposes. The
collation of the exposure data found in the open (public), grey literature and in data(bases) of
existing and emerging models, revealed a significant amount of papers (or reports) with quantitative
exposure data. However, although most of the collated exposure data-sources identified are publicly
available, only about one third of the sources have raw data (detailed measurement data) that is
readily accessible and only about half of these consist of data for plant protection products (PPPs).
It became clear at an early stage of the BROWSE database development that the available data does
not provide the desired level of contextual information required for modeling purposes. In order to
develop probabilistic models, new and good quality data is required. Unfortunately the BROWSE
consortia did not get access to new/recent and contextually-rich data. 5

Nevertheless, within the BROWSE framework the following options were considered for the further
development of a model for operator exposure:
• Improvement of the existing empirical models with more data
• Combination of an empirical and mechanistic modeling approach
• Development of a mechanistic model
• Inclusion of probabilistic modeling, taking into account probability distributions and uncertainty
in exposure
The aim and scope of WP1 was formulated after a comprehensive review of the currently available
PPPs, biocide and other exposure models, and considering the scenarios that are covered in current
PPP models.
2 Scope and Aim
The following aims are proposed for the operator models (WP1):
• Develop a single, new and improved modeling framework, integrating all available exposure data
• Incorporate recently-generated, high-quality exposure data if available
• Take explicit account of key factors and mechanisms influencing exposure, account for non-
linearity, strengthen estimation where data are limited and to produce probability distributions
of exposure
• Use data on operator practices in different Member States to take account of controls &
protective equipment
• Take account of regional & gender differences where possible
The following scenarios were selected for WP1 operator model development:
• boom spraying
• mixing & loading (liquids and solids)
• orchard spraying
• hand-held spraying
6

3 BROWSE WP1 operator models
3.1 User interface
See relevant software documentation. The relevant user inputs required for the user-interface are
presented for each model in the respective sections of this report.
3.2 Exposure models
Conceptual model
A generic conceptual model has been developed (Figure 1) to support the development of models
for each scenario. It describes the transport of a PPP from the source to the receptor (operator). This
model considers three main routes of personal exposure, i.e. (i) inhalation (via respiratory tract), (ii)
dermal (via skin) and (iii) ingestion (via mouth). The model consists of different compartments
through which the pesticide can pass. These compartments can broadly be divided into three steps:
• Emission from source (source, local source zone)
• Transport between source and operator (air-, surface- and bulk- zone)
• Transport at the operator (respiratory protective equipment (RPE), outer clothing contaminant
layer, inner clothing contaminant layer, skin contaminant layer, (pre-)oral /mouth)
The transport of PPPs occur through 4 mechanisms, (i) separation from gas/vapour or solid particles
from parent material (source strength), (ii) transport between compartments, (iii) loss of pesticide
from compartments due to sinks, and (iv) uptake by the receptor (Tielemans et al, 2008). The latter
mechanism (uptake) is only included as an estimate after modeling the different routes of exposure.
The inhalation exposure models accounts for the most important determinants that are involved in
the airborne transfer of PPPs from the formulation. The dermal exposure is the most complex route
of exposure and occurs through three potential pathways, i.e. (i) deposition from the air, (ii) contacts
between surfaces and the body, and (iii) bulk transfer through splashes or dripping (from liquids) and
impaction (from solids) (Schneider et al, 1999). It should be noted that the three potential dermal
pathways of exposure are scenario-specific and not always relevant (and therefore not included in
all the models). And lastly, a generic estimate is made of ingestion exposure that considers
contamination of the hands or gloves and the probability that it is transferred into the mouth and
oral route.
7

Figure 1: Conceptual model for operator exposure to PPPs
Modeling approach
For each scenario and exposure route, the most important determinants that influence the transport
of a PPP from the source to the receptor were identified and, where appropriate, included in the
models. Their effect sizes and correlations were evaluated and determined by means of data
analyses, literature reviews and expert opinion. Subsequently, mechanistic algorithms were
developed using the available evidence to underpin the models.
In general, the following modeling procedure was followed for each scenario:
• Collation of available evidence from the literature
• Statistical (regression and correlation) analyses of the available exposure data
• Identifying exposure determinants and allocating effect sizes and distributions (incl. information
from EFSA and BROWSE survey data, e.g. Glass et al, 2012)
• Adopt experimental data as input for the models (where available and/or appropriate)
Surface zone
Source
Local source zone
Skin contaminant layer(different body parts)
Outer clothing contaminant layer
Inner clothing contaminant layer
Air zone Bulk zone
Respiratory tract Oral
Respiratory protective equipment
Deposition Splashes/impaction Surface contact
Inhalation Ingestion Dermal
8

• Developing mechanistic algorithms
• Coding the datasets with the (missing) model input parameters, and introducing imputed data
where appropriate using statistical techniques (e.g. bootstrapping)
• Sensitivity analysis (SA) of the model algorithms
• Comparison and testing of model outputs with data (no calibration or fitting/transforming was
performed due to data quality issues)
• Comparing the model outputs with existing model outputs
Depending on the available evidence of exposure determinants of a given scenario, available
experimental data and existing models, the most useful type of model was selected. This resulted in
different levels of complexity of the respective mechanistic algorithms. Examples include:
• Using models of other BROWSE work packages (input from WP3 for the BS inhalation model)
• Using experimental data (surface contamination and hand/body exposure levels for the BS hands,
ML hands and ML body models)
• Using existing models (Advanced REACH tool (ART) for ML inhalation)
• Using extrapolation (BS body extrapolated from BS hands model)
Table 1 gives an overview of the principal inputs of each model and the data used for testing.
Table 1: Key model inputs and data used
Model Examples of key inputs Derived from Exposure data used for testing
BS inhalation
Spray volume rate WP3 estimate (airborne fraction estimate) Vehicle-sprayer type (dispersion estimate)
User input Experimental spray drift data & WP3 model Literature review
BROWSE database Inhalation data
BS hands Surface contamination levels (% of total spray volume) Contact event frequency
Vehicle-sprayer contamination studies User input
BROWSE database Bare hand & Protected hand
BS body Extrapolation BS hands model Contact event frequency
Literature review User input
BROWSE database Whole body (excl. hands)
*ML inhalation ART model
Existing calibrated model (based on literature review and expert elicitation procedure)
BROWSE database Inhalation data
*ML hands
Container contamination levels Hand contamination levels
Experimental studies Experimental studies
BROWSE database Bare hand &
9

Model Examples of key inputs Derived from Exposure data used for testing
Contact event frequency User input Protected hand
*ML body Body contamination levels Contact event frequency
Experimental studies User input
BROWSE database Whole body (excl. hands)
Orchard spraying Inhalation
Spray volume rate Fraction of overspray Row spacing Vehicle/ forward speed Wind speed
User input Experimental studies User input User input User input
BROWSE database Inhalation data
Orchard spraying hands
Surface contamination levels (% of total spray volume) Contact event frequency
Vehicle-sprayer contamination studies User input
BROWSE database Bare hand & Protected hand
Orchard spraying total body
Deposition estimation (based on cockpit contamination)
Vehicle-sprayer contamination studies
BROWSE database Whole body (excl. hands)
Hand-held models
Spray volume rate Surface contamination level Application efficiency Air Concentration
User input Studies on Surface Contamination of the Equipment when ML Literature review Existing calibrated model (based on literature review and expert elicitation procedure)
BROWSE database Hands and Whole body (excluding hands)
*Note a distinction is made between manual and mechanical mixing and loading (ML) models (not indicated in this Table)
Sensitivity analysis
Sensitivity analysis (SA) was performed for the model algorithms of each scenario. Using the input
ranges of the model algorithm a Latin hypercube sampling space of 400 points are generated across
the inputs. Due to several discrete inputs the samples are converted from a discrete uniform
distribution. Preferably, separate sensitivity analyses (SA) are required for different combinations of
categorical variables in the models.
Model testing with data and imputation of data
For each of the models described in this report we have some empirical data available which consists
of information on the inputs for the models (e.g. concentration of active substance, wind speed etc.)
10

along with the measured output (e.g. potential dermal exposure on the hands and / or body etc.)
from the field study. For each of these datasets we run the relevant model and compare the model
outputs with the measured output. However, several datasets are not complete and contain missing
pieces of information. Where this was the case the missing input or inputs were imputed by
empirical sampling from existing values for that input in the available data. As a result, this report
distinguishes between ‘true datasets’ and ‘imputed datasets’. To summarise the output we calculate
the geometric mean, median, 2.5th percentile and 97.5th percentile. We then plot the geometric
mean of the output against the true measured values that we have from the available data and plot
the 95% confidence intervals, medians and geometric means of the output against the true values
(all on log10 scale) for comparison. Except where indicated otherwise we use 10,000 iterations of
each model. Where relevant, a clear distinction is made between the measured values or results for
the model runs when the data set used was complete and when input values needed to be imputed
in the respective plots.
To test the models, two types of plots / graphs are presented:
• The measured potential exposure under specific conditions (y-axis) against the geometric mean
of the model outputs (x-axis) under the same conditions (i.e. same model inputs)
• The individual measured potential exposure (dots) and estimated model outputs (grey lines)
under the same conditions (i.e. same model inputs) plotted with the exposure level ( y-axis). We
present two of these plots with the results sorted in two different ways. The first plot is sorted on
the median model output and the second is sorted on the measured exposure values.
The models were only compared or tested with available exposure data. Thus no calibration or
transforming/fitting was performed in any of the models.
Reasons for not calibrating or fitting the models were:
(1) Considerable variation in both the data and model outputs, and
(2) Sub-standard data quality of the BROWSE database (e.g. limited or missing contextual data)
Regression analyses will not be robust when based on small datasets (the regression will
automatically remove any datasets with missing values). Although imputation is used to replace the
missing values, it’s not clear what effect this will have on the outputs.
11

Dermal sampling techniques
For potential dermal exposures, a preliminary analysis of the data showed no conclusive differences
in hand exposure data using different sampling techniques, i.e. bare hands and protected gloves.
‘Bare hands’ data refer to the measured amount of potential dermal exposure on unprotected hands
(no protective gloves worn) or on sampling (non-protective) gloves, e.g. cotton or Tyvek gloves.
‘Protective gloves’ data refer to the measured amount of potential dermal exposure on protective
gloves. When testing the hand models, the data used for hand exposure were based on both these
sampling techniques (depending on the data available). So combining the sampling techniques in the
data used for model testing may result in increased or unknown variability and outputs.
Background calculations
Various background calculations are performed in the software in order to calculate model inputs.
Typical examples include an estimate of the spraying time (to estimate the spray volume rate), the
ML periods and the number of containers used (Appendix L).
3.2.1 Boom spraying inhalation model
(a) Description
The boom spraying scenario represents field sprayers using hydraulic nozzles, but excludes air-
assisted operations. Operator inhalation exposure is assumed to originate from the spraying
equipment that releases airborne droplets during boom spraying (BS) activities. The inhalation
model focuses on droplet spray and predicts the air concentration of droplets in the breathing zone
of the operator. The dispersion process behind a moving vehicle is complex, and the available
mechanistic models that are used in drift prediction (e.g. individual drop trajectory and Gaussian
models) are not suitable to predict transfer from the boom to the vehicle. However, these models
may be useful to estimate the amount (or fraction) of airborne spray at the boom.
To estimate inhalation exposure of operators during BS, the transfer mechanisms associated with
wake and plume are considered (see Appendix A).
Proposed model:
The model consists of three parts that represents the three consecutive phases of the source-
receptor model:
(i) Local airborne spray emission (ASE)
12

(ii) Dispersion from boom to vehicle (to estimate Cvehicle)
(iii) Dispersion from vehicle to operator using cabin efficiencies (If)
More details of input variables of the model are presented in Tables 2 and 3.
(i) Local airborne spray emission (ASE)
The amount of airborne spray around the vehicle is divided into (and the sum of) two local airborne
spray emission estimates (ASEwakein & ASEplumein). The spray emission rate (in L/s) implicitly takes
account of the spraying time and assumes that the resulting air concentration is steady over time.
It describes the dispersion from the boom to the vehicle via wakes (ASEwakein) (boom nozzles directly
behind the vehicle-sprayer) and via a plume (ASEplumein) (boom nozzles located on outer boom part).
Mass balance inputs to estimate the ASE is the spray volume rate (l/s), derived from the total
volume applied and the spraying time. The fraction of spray volume that remains airborne in close
proximity of the boom is expressed as a factor (fairborne spray). This estimate is obtained from the
droplet trajectory model (Browse WP3 model) and used to estimate the fairborne spray for different
droplet qualities, i.e. fine, medium, course and very course (Appendix A). The output of the model is
based on fixed variables for distance (at 2 meters downwind of the boom), at a worst case 90
degrees wind angle. The model also includes factors such as wind speed, boom height (above crop),
crop height and vehicle speed. The WP3 output is a factor that represents the estimated fraction of
airborne droplets. It is derived from the WP3 emulator by dividing the value by 2 and then adjusted
these values to be in line with the intended fairborne spray estimate.
(ii) Dispersion from boom to vehicle (to estimate Cvehicle)
To estimate the dispersion of spray from the boom to the operator, the previously described ASE
estimates are used as input. Both the mass balance inputs of ASEwakein and ASEplumein inputs are
affected by the presence of boom shields (bs), Table 7.
The dispersion of droplet spray by plume (ASEplumein) from the outer part of boom (not directly
affected by wake effects) is determined by a plume factor (pf) based on an estimate of the
probability of plume reaching the vehicle based on different wind speeds, wind directions, driving
directions and the fraction expected to reach the vehicle-sprayer (Appendix A). Both the ASEwakein
and ASEplumein estimates are assumed to be relevant as droplet spray around the vehicle-sprayer. The
dispersion of droplet spray around the vehicle-sprayer is determined by its size (height, width,
13

length) and the vehicle speed. The rationale behind this is that the area around the vehicle-sprayer is
continuously dispersed by the vehicle speed (vvehicle) through a surface area (i.e. the width and height
of the vehicle-sprayer, Avehicle) that is perpendicular to the driving direction (Tables 4 and 5). The
length of the vehicle-sprayer (d), distinguished as vehicle-mounted/self-propelled and trailer-
mounted rigs, represents the distance between the vehicle and the boom (Table 6).
All these parameters are used to estimate the concentration of droplet spray around the vehicle
Cvehicle (see algorithms).
(iii) Dispersion from vehicle to operator using cabin efficiencies (If)
Personal enclosures on vehicles (e.g. cabins) may affect the transfer of spray to the operator.
The categories proposed for cabins are presented in Table 8 (Appendix D).
(b) Algorithms
Ipde = Cvehicle * If * Ccoi
Ipde Potential inhalation exposure concentration to the active substance (in droplet
spray) (µg/m3)
Ccoi Concentration of a.s. in spray volume (µg/l)
Cvehicle Concentration of droplet spray at the vehicle (l/m3)
If Cabin efficiency (factor)
where
Cvehicle = (ASEwakein + (ASEplumein ∗ 𝑝𝑓)) ∗ 𝑏𝑠
Avehicle ∗ vvehicle ∗ 𝑑
ASEwakein flux of spray from boom nozzles in close proximity of vehicle affected by wake (l/s)
ASEplumein flux of spray from nozzles further along the boom affected by a plume effect (l/s)
pf fraction of plume that reaches the vehicle-sprayer
bs effect of boom shielding
Avehicle surface area perpendicular to the vehicle’s driving direction where air exchange
occurs (m2) based on w (width of vehicle-sprayer) and h (height of vehicle-sprayer)
14

vvehicle vehicle speed (m/s)
d vehicle-sprayer length categories based on vehicle-mounted and self-propelled (VM)
and trailer-mounted (TM) rigs
With
ASEwakein = AR ∗ fairborne spray ∗wlb
And
ASEplumein = AR ∗ fairborne spray ∗𝑙𝑏 − 𝑤2 ∗ 𝑙𝑏
AR spray volume rate (L/s)
fairborne spray fraction of spray volume that remain airborne in close proximity of the boom
immediately after spray emission (factor) [from WP3 model] where:
• airChild = (emulatorValue / 2#) * vehicle speed (m/s)/ nozzle flow rate (ml/s) / number of
nozzles
• airAdult = (emulatorValue / 2#) * 2 *vehicle speed (m/s)/ nozzle flow rate (ml/s) / number
of nozzles
• fAirborneSpray = airAdult – airChild
w width of vehicle-sprayer (= 2 times vehicle/sprayer width, m)
lb total boom width (m)
Note: if w>lb, then w=lb where the boom width (lb) is assumed true (it is therefore
reasonably assumed that the boom width is at least the width of the virtual space
(2x vehicle-sprayer width) – in order to avoid using negative values)
# a fixed default value is applied assuming a 90 degree wind angle, equivalent to
following wind for the operator, divided by 2 on the assumption that the wind will
only be following for half of the time as the tractor will either have a head wind or
tail wind.
(c) Sensitivity analysis
Sensitivity analysis (SA) was carried out on the output representing potential dermal exposure on
the body, for the boom spraying and mixing/loading model. SA is designed to show which inputs or 15

groups of inputs has the greatest impact on the output, given their individual ranges and variability.
SA can also show the nature of the input/output relationships and provided a useful check on the
model behavior. For this reason, it has been used as part of our testing process to assess whether
the input/output relationship is realistic for individual modules. An example of this is given below in
Figure 2. The inputs which have the most influence are wind speed (m/s), concentration of a.s. in
spray volume (g/l), spray volume rate (l/s) and cabin factor. As the first three increase, the
log(exposure) generally increases. For cabin factor, as the cabin factor increases from no cabin to a
cabin with pressurized/filtered ventilation, the log(exposure) decreases.
For this example, the partitioning of output variance is also presented in Table 9. This partitioning
shows how each of the variability distributions, assigned to individual model inputs, contributes to
the induced total output variation. SA contributes to the testing of the model, in addition to the
more detailed testing described below. The details of the SA method with results from the latest
Browse model and some conclusions are given in Appendix M.
(d) Model testing
Please refer to the type of plots/graphs and explanation under item 3.2.
For the testing of the BS inhalation model, the value of boom shielding (bs) was fixed at 1, assuming
the absence of boom shielding in the data. Figure 3 shows the model estimates plotted against all
the available data (including all imputed datasets). Using a different plot type, Figure 4 indicates
whether the data concerns vehicle-(rear-mounted) and self-propelled sprayers (circles) or trailer-
mounted sprayers (squares). The output suggests that the model, in some cases, under-predicts for
trailer-mounted sprayers and over-predicts for vehicle/self-propelled sprayers. However, most of
these outputs are based on imputed data (blue) and this assumption may therefore not be
conclusive.
Figures 5 and 6 show the performance of the model using complete datasets only (with only boom
shielding imputed with a fixed value), which indicates that the model outputs fit better with the
complete datasets than the imputed datasets.
16

(e) Tables
Table 2: Boom spraying inhalation model - model inputs*
No Inputs Lower Upper Type Based on 1 Concentration of a.s. in spray
volume (g/l) 0.05 50 selected value BROWSE data
2 Spray volume rate (l/s) 0.01 1.5 selected value BROWSE data 3 Cabin factor (3 categories) 0.0001 1 Normal Literature review
(Appendix D) 4 Vehicle sprayer type
height*width (8 categories) 2.4 32 selected value Different sources
(Appendix B) 5 Vehicle or trailer mounted –
length/distance (3 categories) 0.01 1 Uniform DEFRA SID5 report
(Appendix B) 6 Boom Height above crop (m) 0.2 1.2 selected value WP3 & BROWSE data 7 Boom width (m) 2 45 selected value WP3 & BROWSE data 8 Wind speed (m/s) 0.5 10 selected value WP3 & BROWSE data 9 Plume factor NA NA fixed at 0.01 Expert estimate
(Appendix A) 10 Forward speed (km/h) 4 25 selected value WP3 & BROWSE data 11 Boom shielding# NA NA fixed at 0.7 if boom
shielding present and 1 if absent
Literature review (Appendix C)
* separate models developed using (i) different spray qualities (fine, medium, course, very course) and (ii) different crop heights (0.1, 0.5, 1.0, 1.5m)
# fixed at 1 for the testing in the absence of contextual data Table 3: Boom spraying inhalation model - input variables
Input variables Unit User input Model input From/for Concentration of a.s. in spray volume
g/l User input User input Mass balance input
Cabin factor n/a (i) No cabin (ii) Cabin without
pressurized/filtered ventilation
(iii) Cabin with
pressurized/filtered ventilation
1 Sample from U(0.1, 0.25) with probability 0.25, from U(0.25, 0.5) with probability 0.5 and from U(0.5, 0.9) with probability 0.25 Sample from U(0.0001, 0.05) with probability 0.25, from U(0.05, 0.15) with probability 0.5 and from U(0.15, 0.3) with probability 0.25
Literature review Table 7 Appendix D
Wind speed km/h From WP3: 1-20 km/h User input converted for use in WP3 model
WP3 model (to estimate fairborne spray)
17

Input variables Unit User input Model input From/for Boom height above crop
M From WP3: 0-1.2 m range for users to choose from
User input WP3 model (to estimate fairborne spray)
Crop Height M From WP3: User can choose from 0.1, 0.5, 1.0, 1.5
Use selected value WP3 model (to estimate fairborne spray)
Volume applied L Estimated from total area sprayed, dose, final mixing & loading concentration
Estimated from total area sprayed, dose, final mixing & loading concentration
As input for spray volume rate (AR)
Spraying time Min Estimated from total area sprayed, boom width and vehicle speed
Estimated from total area sprayed, boom width and vehicle speed (((areaSprayedHa*10000)/(totalBoomWidthM*dForward_SpeedKMH*16.67)*1.25))
As input for spray volume rate (AR)
Vehicle-sprayer width
M Categories: S, M, L, U, sSP, mSP, lSP, O
Sampled from respective categories
Literature review Table 4 Appendix B
Vehicle-sprayer height
M Categories: S, M, L, U, sSP, mSP, lSP, O
Sample from respective categories
Literature review Table 5 Appendix B
Vehicle-sprayer length/distance
M Categories: vehicle-mounted and self-propelled (VM), trailer-mounted (TM), unknown (O)
Sampled from respective categories
Literature review Table 6 Appendix B
Boom width (m)
M User input User input To estimate ASEwakein and ASEplumein (see algorithm)
Forward speed km/h 4-25 km/h User input WP3 model and dispersion estimate
Droplet Size n/a (i) Fine (ii) Medium (iii) Coarse (iv) Very coarse
Use selected droplet size WP3 model (to estimate fairborne spray)
Wind Angle ° 90° Fixed Emulator value will be divided by 2 for adult and child before taking the difference
WP3 model (to estimate fairborne spray)
Number of nozzles
- None For WP3 estimate: Total number of nozzles calculated with nozzle spacing and number of passes. Estimated from rounding down (boom width*2)
WP3 model (to estimate fairborne spray)
18

Input variables Unit User input Model input From/for Distance used to estimate fairborne spray)
M None Fixed at 2m downwind for WP3 estimate
WP3 model (to estimate fairborne spray)
Plume factor - None Fixed at 0.01 Expert estimate Appendix A
Boom shielding - User input Shielding absent (1) Shielding present (0.7)
Literature review Table 7 Appendix C
Table 4: Vehicle widths categories
Vehicle type* Codes Width of the vehicle-sprayer (m)1
Width of vehicle-sprayer relevant for wake (m)2
Range (m)
Small S 1.3 3 2.0-3.0
Average, Unimog, small&medium self-propelled
M, U, sSP, mSP 2.3 5 4.0-6.0
Large, large self-propelled L, lSP 3.3 7 6.0-8.0
Unknown O - - 2-8 1 proposed width of vehicle 2 ~2 times vehicle width (to take account of area around sprayer affected by wake effects) * The following vehicle-sprayers are included in the model (Appendix B): S = quad, golf cart, mini tractor (e.g. John Deere compact 1 series) M = average-sized tractor (e.g. John Deere 2 series) L = large-sized tractor, 4WD (e.g. John Deere 9R/RT series) U = unimog or similar sSP = small self-propelled (≤1000L tank) mSP = average sized self-propelled (>1000-3000L tank) lSP = large self-propelled (≥3000L tank) O = unknown
Table 5: Height dimensions of vehicles used for boom spraying
Vehicle type Codes Height (m) Range (m)
Small S 1.5 1.2-2.0
Average, Unimog, Small&medium self-propelled M, U, sSP, mSP 2.5 2.0-3.0
Large, large self-propelled L, lSP 3.5 3.0-4.0
Unknown O - 1.2-4.0
19

Table 6: Length / distance categories based on vehicle and spraying rig configurations1
1 based on literature review (Appendix B) ^ vehicle-sprayer configurations with front-fitted booms (>0m) are currently assigned with a fixed value
of 1, assuming no reduced effect compared with drawn booms
Table 7: Proposal of multipliers/factors for boom shields1
Category Description % Drift reduction Range Multiplier
A No shields 0 n/a 1
B Boom shields (any type) 30 10 – 70 0.7
1 based on literature review (Appendix C) Note: For testing, the current dataset used for model development has no information on boom shields. For
now, a factor of 1 are assigned to all data entries
Table 8: Proposal cabin categories and associated multipliers/factors1
Category Description % Cabin efficiency Range (%) Range (factor)
Lower Upper A No cabin 1 n/a Fixed 1 B Cabin without
pressurized/filtered ventilation, OR with ventilation but without filtration
60 10 - 90 0.1 0.9
C Cabin with pressurized / filtered ventilation*
90 70 - >99 0.0001 0.3
1 based on literature review (Appendix D) * criteria will be used in the user interface to verify ventilation & filtration compliances (ASAE S-525)
Type Code Length, distance^ (range, m)
Range (factor) *
Lower Upper
Front-fitted booms FB 0 Fixed 1.0 -
Vehicle-mounted and self-propelled VM 1-6 0.1 0.9 Trailer-mounted TM 4-12 0.01 0.25
Unknown O 0-12 0.01 1.0
20

Table 9: Effect of variance explained by the model inputs (for fine nozzle, crop height 0,1m only)*
Number Input Total effect of
variance individually (%)
Total effect of variance including joint effects
(%) 1 Concentration of a.s. in spray volume (g/l) 18.70 20.37
2 Spray volume rate (l/s) 17.14 19.29
3 Cabin factor 13.46 13.92
4 Boom Height above crop (m) 6.25 7.49
5 Boom width (m) 0.29 0.35
6 Wind speed (m/s) 30.49 32.70
7 Vehicle sprayer 4.56 6.12
8 Vehicle or trailer mounted 0.06 0.07
9 Plume factor 0.88 1.01
10 Forward speed (km/h) 0.91 1.10
11 Boom shielding 2.26 3.31
* Please note that GEM-SA may be outdated. The SA is intended for continuous inputs, so re-runs required for each categorical input
21

(f) Figures
Figure 2: Example of SA output: Plot of main effects for crop height 0.1m and fine nozzle type
W
W
W
W
W
W
W
W
WW
W
0.0 0.2 0.4 0.6 0.8 1.0
45
67
standardised input value
mai
n ef
fect
C
C
C
C
C
C
CC C C
C
A
A
A
A
A
A
AA A A A
F
F
F
F
F
F
F
F
F
F
F
Mean effect95% probability intervalLeast important mean effects
W Wind speed C Concentration of a.s. in spray volume A Spray volume rate (l/s) F Cabin factor
22

Figure 3: Inhalation exposure: Plot of log10(all data*) (measured potential inhalation exposure all
data*) and log10(geometric mean(model outputs)) *including results based on datasets where some inputs were imputed datasets (blue) and results where all inputs were known (apart from boom shielding) (red).
0.001 0.01 0.1 1 10 100 1000 10000 1000000.001
0.01
0.1
1
10
100
1000
10000
100000
log10 (Geometric mean(Model outputs(µg/m3)))
log 10
(Mea
sure
d po
tent
ial i
nhal
atio
n ex
posu
re(µ
g/m
3 ))
23

Figure 4: Inhalation exposure: Plot of 95% CIs (grey lines), geometric means (red lines) and medians
(black dashed lines) for the log10(model outputs) with the log10(measured potential inhalation exposure) [blue=where some inputs were imputed; red=complete set of inputs to the model except for fixed boom shielding imputation; circles=vehicle-mounted and self-propelled; squares=trailer-mounted]. The index refers to the ordering of the model outputs and measured values when sorted on the medians of the model outputs.
0 20 40 60 80 100 120 140 160 1800.0001
0.001
0.01
0.1
1
10
100
1000
10000
100000
Index
log 10
(Pot
entia
l inh
alat
ion
expo
sure
(µg/
m3 )
)
24

Figure 5: Inhalation exposure: Plot of 95% CIs (grey lines), geometric means (red lines) and medians
(black dashed lines) for the log10(model outputs) with the log10 (measured potential inhalation exposure [red dots represent complete sets of model inputs except for fixed boom shielding imputation]). The index refers to the number assigned to the model outputs and measured inhalation exposure when they are sorted based on the measured inhalation exposure.
0 10 20 30 40 50 600.0001
0.001
0.01
0.1
1
10
100
1000
Index
log 10
(Pot
entia
l inh
alat
ion
expo
sure
(µg/
m3 )
)
25

Figure 6: Inhalation exposure: Plot of 95% CIs (grey lines), means (red lines) and medians (black
dashed lines) for the log10(model outputs) with the log10 (measured potential inhalation exposure for datasets which had a complete set of inputs except for fixed boom shielding imputation = red dots) The index refers to the sorting on the medians of the model output.
3.2.2 Boom spraying dermal model
(a) Description
The boom spraying dermal models consist of a hand model (Dph) and whole body model (Dpw). The
following activities of an operator during the boom spraying scenario are included:
• Operating the vehicle (vehicle cockpit with & without cabin)
• Stepping into/out of vehicle (contact with the vehicle interior & exterior)
• Incidental activities with the spraying rig, e.g. mounting/dismounting the rig, manual (un-)
folding of boom, maintenance of nozzles.
The models consider important determinants of dermal exposure associated with field sprayer
operations, e.g. type of spraying equipment (trailer, rear-mounted), number of unplugged nozzles
and number of application tasks (Lebailly et al, 2009). As high dermal exposures are associated with
0 10 20 30 40 50 600.0001
0.001
0.01
0.1
1
10
100
1000
Index
log 10
(Pot
entia
l inh
alat
ion
expo
sure
(µg/
m3 )
)
26

incidental activities with contaminated spraying rigs and nozzles (as opposed to the vehicle cockpit),
the model includes both the vehicle cockpit and spraying rig as sources of exposure. The cleaning of
vehicles and spraying equipment are not included as a parameter in the models because the effect
of this activity on exposure is not known.
Hand model
The hand model considers two routes of exposure, i.e. surface contacts and deposition. An estimate
of exposure from surface contacts is based on two key parameters as described by Gorman et al
(2012), i.e. frequency of contacts and surface contamination levels. The estimate of deposition onto
the hands is based on the inhalation estimate (Ipde). The input parameters and ranges of the models
are presented in Table 10.
(i) Frequency of surface contacts
The hand model applies event frequencies to provide an indication of surface contact frequencies.
The following event frequencies are included in the hand model (see Table 10):
• Surface contacts with the vehicle cockpit is represented by events of stepping into/out of the
vehicle, i.e. the number of mixing & loading periods (Fmlp) and number of times leaving the
vehicle during trouble-shooting or nozzle maintenance (Fnr)
• Surface contacts with the delivery system/rig is represented by (i) trouble-shooting and nozzle
maintenance events (Fnr) and (ii) incidental contacts such as (de-)mounting and boom
(un)folding prior to and after spraying (Frig)
The mixing & loading periods (Fmlp) are estimated from the volume applied and the tank volume. The
volume applied parameter is estimated from user inputs and are based on the total area sprayed
(Ha), dose (kg/Ha) and final mixing & loading concentration (g/l).
To determine the frequency of nozzle maintenance (Fnr), information on the frequency of trouble
shooting/nozzle maintenance during boom spraying (e.g. Lebailly et al, 2009; Bell & Lloyd, 1988) was
consulted. For the BS dermal hand model, a default of 3 nozzle maintenance events during spraying
operations is proposed. When testing the model with data (with no information of nozzle
maintenance frequencies), it is assumed that contact events with the nozzles during spraying (Fnr)
are between 0 and a worst case of 15, with a 90% probability of between 0 and 5 and 10%
probability of between 6 and 15.
27

Other events that may occur prior to or after spraying activities include nozzle replacement, (de-)
mounting of the rig and manual boom (un)folding. A fixed event frequency with the rig and nozzles
before and after spraying (Frig) is set at 1. Frig are not included as user input assuming that this is not
a known input.
These values may be updated with evidence of frequencies of different activities during boom
spraying with different vehicle-sprayer types (e.g. Lebailly et al, 2009).
(ii) Surface contamination levels
The surface contamination level (µg/cm2 of a.s.) on field sprayers are highly variable and limited
evidence is available on the determinants influencing the deposition on vehicle and sprayer surfaces
of field sprayers. Ideally the surface contamination levels should be derived from data for different
vehicle-sprayer configurations, different spray qualities, etc. However, this information is only
available in a few specific settings (e.g. Balsari & Marucco, 2003). As result, it was decided to use a
broad range of contamination levels as input for the model (Table 11 & Appendix E). For this
purpose, contamination levels are based on three ‘Volume applied’ categories based on the
percentage of the total spray volume that deposits on the vehicle and delivery system.
Other parameters included in the model algorithm are spray quality, wind speed, sprayer type (or
distance/length) and cabins.
Spray quality is considered to distinguish between flat fan low drift nozzles (VMD=220um) and flat
fan conventional nozzle (VMD=165um) (Balsari & Marucco, 2003). For wind speed, a distinction is
made between wind speeds of <1m/s and >1m/s, assuming an increase in external contamination
with higher wind speed (van de Zande et al, 2007).
Self–propelled sprayers are known to have significantly higher external contamination levels
compared to vehicle-mounted and trailer-mounted spraying rigs (Ramwell, et al, 2004). Other field
trials indicate that dermal exposure during boom spraying applications are higher among farmers
using rear-mounted sprayers compared to trailer-mounted sprayers (Lebailly et al, 2009). In the
absence of conclusive evidence, it is assumed that the distance between the boom and operator
affects dispersion and deposition. For this purpose, the model distinguishes between vehicle-
mounted and self-propelled sprayers (VM) and trailer-mounted sprayers (TM). As the surface
contamination level estimate on the vehicle cockpit concerns the vehicle exterior, a cabin efficiency
factor is also included. The effect sizes proposed for distance (vehicle- & trailer-mounted) and cabin
28

efficiency in the boom spraying inhalation model are adopted for this model (Tables 6 and 8
respectively).
In addition, the transfer efficiency from surfaces to body parts (Cf) (Appendix H), body surfaces areas
(BP) and the affected surface area of body parts (lcn/BP) (Appendix I) are included in the algorithm.
The surface-to-hand transfer efficiency (Cf) is corrected to account for multiple contacts, for both
contacts with the cockpit (Cftot_cockpit) and rig (Cftot_Rig) (Appendix J).
(iii) Deposition
Deposition on the hands is estimated by using the inhalation estimate as input (Ipde), while
considering the droplet settling velocity (vdep) and application time (t) (see table 10). One side of
both hands is considered relevant as the affected surface area of the hands (50%).
Whole body (excl. hands) model
To estimate the whole body dermal exposure, the hand model is used with an extrapolation based
on a review of body part distributions during boom spraying activities (Appendix F). The
extrapolation distinguishes between the presence (Fnr >0) or absence (Fnr = 0) of hand exposure due
to trouble shooting and nozzle maintenance. The extrapolation assumes that in the absence of
trouble-shooting and nozzle maintenance (Fnr = 0), the hands are less contaminated compared to the
whole body (see algorithm).
(b) Algorithms
I Hand exposure model (Dph)
Dph= ((Sccockpit * Ccoi * Sq * Ws * d * If) * (Cftot_cockpit * BPhands*lcn/BPpalms) + (Scrig * Ccoi * Sq * ws) *
(Cftot_rig * BPhands*lcn/BPpalms) + Ddep
Where
𝐷𝑑𝑒𝑝 =𝐼𝑝𝑑𝑒 ∗ 𝑡 ∗ 𝑣𝑑𝑒𝑝 ∗ 𝐵𝑃ℎ𝑎𝑛𝑑𝑠 ∗ 𝑙𝑐𝑛
𝐵𝑃ℎ𝑎𝑛𝑑𝑠_𝑡𝑜𝑝
And
29

𝐶𝑓𝑡𝑜𝑡_𝑐𝑜𝑐𝑘𝑝𝑖𝑡 = � �𝐶𝑓 0.5(𝑘−1)�
𝐹𝑚𝑙𝑝+𝐹𝑛𝑟
𝑘=1
𝐶𝑓𝑡𝑜𝑡_𝑟𝑖𝑔 = � �𝐶𝑓 0.5(𝑘−1)�
𝐹𝑛𝑟+𝐹𝑟𝑖𝑔
𝑘=1
Dph potential dermal exposure to a.s. in µg on the hands
Dph_cockpit potential dermal exposure to a.s. in µg on the hands (from vehicle/cockpit surfaces)
Dph_rig potential dermal exposure to a.s. in µg on the hands (from rig, boom, nozzles)
Sccockpit surface contamination levels (l/m2) of vehicle/cockpit
Scrig surface contamination levels (l/m2) of rig
Ccoi concentration of a.s. in spraying volume (µg/l)
Sq droplet quality (SqFine = 2.8; SqMediumCourseVeryCourse = 1)
ws ws ≤ 1m/s (factor 0,5), ws > 1m/s (factor 1)
Fmlp number of mixing & loading periods (= tankfulls applied) (assuming that the operator
stepped in/out of the vehicle during M&L periods)
Fnr number of nozzle maintenance events (indicating both (i) frequency of stepping i/o
of vehicle (contacts with cockpit), and (ii) contacts with boom/nozzles)
Frig frequency of incidental contacts with the rig/boom excl. nozzle maintenance
(assuming a default of 1 contact event during (de-)mounting or boom folding) prior
to and after spraying
d distance effect (mounted/self-propelled (VM) and trailer mounted (TM) sprayers)
If cabin factor
BPhands total surface area of hands (m2)
lcn/BPpalms affected surface area of hands (m2 of BP) (palms)
Cf transfer efficiency for the grasping of smooth surfaces = triangular distribution with
lower value 0.23, mode 0.45 and upper 0.68
Cftot_cockpit corrected transfer efficiency for multiple contacts (maximum: 0.89 with Cf = 0.45;
Fmlp + Fnr = 6) (Appendix H)
Cftot_Rig corrected transfer efficiency for multiple contacts (maximum: 0.89 with Cf = 0.45; Fnr
+ Frig = 6) (Appendix H)
Ddep Potential dermal hand exposure to droplets via deposition (µg)
30

Ipde Inhalation exposure estimate from inhalation model - a.i. in air (µg/m3)
t Total application time (s)
vdep droplet settling velocity average deposition speed of droplets in the air (m/s)
lcn/ BPhands_top Affected surface area of hands (m2 of BP)
Rationale
(Fmlp + Fnr) represent the frequency of surface contact events with the vehicle cockpit (Sccockpit)
when stepping into/out of the vehicle during trouble-shooting and mixing & loading
periods
(Fnr + Frig) represent the frequency of surface contact events with the delivery system/rig (Scrig)
during trouble-shooting and incidental contacts ((de-)mounting, boom folding) prior
to and after spraying
II Whole body (excl. hands) exposure model (Dpw)
The following equation is used to estimate the potential dermal exposure (Dpw) of the whole body in
µg:
Dpw = Dph * Ew
Dpw potential dermal exposure to a.s. in µg on the whole body (excl. hands)
Dph potential dermal exposure to a.s. in µg on the hands (from hand exposure model)
Ew extrapolation from hand exposure model (ew-nozzle or ew-nonozzle) to body exposure
ew-nozzle hand exposure incl. nozzle maintenance extrapolated to whole body
(=0,2), where Fnr >0; assuming 80% of total dermal exposure is
distributed on the hands and 20% on the whole body
ew-nonozzle hand exposure excl. nozzle maintenance extrapolated to whole body
(=0,35), where Fnr = 0; assuming 65% of total dermal exposure is
distributed on the hands and 35% on the whole body
Note: for testing purposes, Ew, is estimated using the Fnr as indicated in Table 10 (90% probability
between 0-5, and 10% probability between 6-15). Software: default 3
(c) Model testing
Please refer to the type of plots/graphs and explanation under item 3.2
31

I Hand exposure model (Dph)
The available data is not suitable for testing the BS hand model, because of data gaps of important
parameters. For example, the number of contact events with the nozzles is not known in the data.
Assuming a frequency of nozzle maintenance (Fnr) of 90% probability between 0 and 5 and 10%
probability between 6 and 15, the model predicts a conservative exposure compared to the broad
range of data (Figure 7). A default nozzle maintenance frequency is set at 3 in the software.
Unfortunately, inputting a distribution for nozzle events will not be feasible as the probabilistic
output of the model (using iterations) will not be able to produce a single estimate with repeated
runs of the model.
II Whole body (excl. hands) exposure model (Dpw)
The whole body exposure model was compared with the dataset using the extrapolation of the hand
model (Figures 1).
(d) Tables
Table 10: Boom spraying dermal models - main user and model inputs* No User inputs Model inputs Lower Upper Type Based on 1 Concentration of a.s.
in spray volume (g/l) Concentration of a.s. in spray volume, Ccoi (g/l)
0.05 50 selected value BROWSE data
2 Volume applied (estimated from total area sprayed, dose, final mixing&loading concentration)
Volume applied (l), 3 categories
50 25000 selected value BROWSE data
3 n/a Cockpit surface contamination levels, Sccockpit (l/m2)
1E-4 5E-2 uniform distributions
Field trial data Table 11 Appendix E
4 n/a Rig surface contamination levels, Scrig (l/m2)
1E-2 2.5E-1 uniform distributions
Field trial data Table 11 Appendix E
5 Number of M&L periods (estimated with volume applied and tank size)
Number of M&L periods (tankfulls applied) (Fmlp)
1 20 selected value BROWSE data
6 Frequency of nozzle maintenance (Fnr);
Frequency of nozzle maintenance (Fnr);
0 15 skew (90% probability
Field studies
32

No User inputs Model inputs Lower Upper Type Based on user selected: 0 - 5; >5; default in software = 3
(With 90% probability between 0-5) (for testing with data only)
between 0 and 5 and 10% probability between 6 and 15)
7 n/a Frequency of contacts with rig prior to/after spraying (Frig)
Fixed at 1
- Fixed Expert opinion Field studies
8 Cabin factor (3 categories)
Cabin factor (3 categories with ranges)
0.0001 1 see inhalation model
Literature review Table 8 Appendix D
9 Vehicle or trailer mounted (3 categories – VM, TM, O-unknown))
Vehicle-sprayer length (d) Vehicle-mounted (0.1 – 0.9) Trailer-mounted (0.01 - 0.25) Front-fitted booms fixed at 1
0.01
1 uniform distributions
Field trial data Table 6 Appendix B
10 Spray quality (sq) (4 categories)
Spray quality (sq)(4 categories); SqFine = 2.8; SqMedium / Coarse / VeryCoarse = 1
1 2.8 selected value Field trials
11 Wind speed (ws) Wind speed (ws) Ws ≤ 1m/s (factor 0,5), Ws > 1m/s (factor 1)
0.5 1.0 selected value Field trials
12 n/a Transfer efficiency from surface to the hands (Cf); e.g. 1st contact = 0.45; 2nd-6th contact (*0.5); see text
0.23 0.68 triangular distribution between 0.23 and 0.68 with a mode at 0.45
IOM database Literature review Appendix H & J
13 Gender (male, female) Surface area of hands (BP) (m2)
- - lognormal distributions (Males: log(SA) ~ Normal (-2.2319, 0.109922) Females: log(SA) ~ Normal(-2.4313, 0.10362))
Appendix I
14 n/a Fraction affected surface area of hands (palms) (lcn/BPpalms)
Fixed 0.5
- Fixed Literature review Appendix I
15 From BS inhalation Inhalation exposure / See previous
33

No User inputs Model inputs Lower Upper Type Based on model air concentration, Ipde
(µg/m3) section
16 n/a Time (s), t
(spraying time)
Fixed at user input
Derived from background calculations (Appendix….)
17 n/a Droplet setting velocity, vdep
0.078 0.313 Uniform Example: Nuyttens et al. 2009
18 n/a Affected surface area of hands (back of hands), (lcn/BPhands_top)
Fixed 0.5
Literature review Appendix I
19 n/a Body model (extrapolation from hands); with nozzle maintenance (Fnr>0) and without nozzle maintenance (Fnr=0)
0.2 0.35 fixed to 0.2 if Fnr > 0 or 0.35 if Fnr = 0 (based on 2 Fnr situations)
Literature review Appendix F
* Models distinguish between Volumes applied and contamination levels of different surfaces
Table 11: Surface contamination levels using Volume Applied categories
Category Volume applied Contamination level cockpit, Sccockpit (l/m2)*+
Contamination level delivery system/rig, Scrig (l/m2)*^
Lower Upper Lower Upper Lower Upper 1 <50 1000 1.0E-4 5.0E-3 1.0E-2 2.5E-1 2 1000 5000 1.0E-4 2.50E-2 1.0E-2 2.5E-1 3 5000 >10000 1.0E-4 5.0E-2 1.0E-2 2.5E-1
* broad categories extrapolated from field sprayer and orchard sprayer contamination studies using the % of total spray volume depositing on the vehicle and delivery system (e.g. Balsari & Marucco, 2003, Ramwell et al, 2005, Michielsen et al, 2012).
+ for Sccockpit, a lower estimate of category 2 is adopted for categories 1 and 3 to account for a minimum contamination level at the start of the operation
^ for Scrig, categories 2 is used as reference for categories 1&3 to account for surface loading on the rig and surface loading over time. A worst case highly contaminated delivery system/rig contamination (incl. potential dripping from nozzles) is applied as an upper range for all categories
34

(e) Figures
Figure 1: Hand exposure: Plot of log10(measured potential dermal exposure (hands)*) and log10(geometric mean(model outputs)) (assuming a 90% probability of 0-5 nozzle maintenance events) *including data sets which have model inputs that were imputed
35

Figure 2: Whole body exposure: Plot of log10(measured potential dermal exposure (body) *) and
log10(geometric mean(model outputs)) * including data sets which have model inputs that were imputed
36

3.2.3 Mixing and loading inhalation model
(a) Using the ART model
Although often considered to be negligible, inhalation exposure to pesticides during the mixing &
loading phase cannot be ruled out, since pure formulation is handled. Therefore, inhalation
exposure will also be modeled for the mixing/loading scenario. Until now only a limited amount of
specific measurement data is available for this activity. However, the activities as performed during
mixing/loading are considered to be comparable as the ones performed with chemicals in general,
for which an exposure model for the estimation of inhalation exposure exists, namely the Advanced
REACH Tool (ART) (www.advancedreachtool.com), which is developed based on a mechanistic model
for inhalation exposure. Therefore it was decided to use this model to estimate inhalation exposure
during mixing/loading activities with PPPs.
The ART mechanistic model is based on a conceptual framework that adopts a source receptor
approach, which describes the transport of a contaminant from the source to the receptor and
defines seven independent principal modifying factors: substance emission potential, activity
emission potential, localized controls, segregation, personal enclosure, surface contamination, and
dispersion. ART currently differentiates between three different exposure types: vapours, mists, and
dust (fumes, fibres, and gases are presently excluded). Various sources were used to assign
numerical values to the multipliers to each modifying factor. The evidence used to underpin this
assessment procedure was based on chemical and physical laws. In addition, empirical data obtained
from literature were used. Where this was not possible, expert elicitation was applied for the
assessment procedure. Multipliers for all modifying factors were peer reviewed by leading experts
from industry, research institutes, and public authorities across the globe. In addition, several
workshops with experts were organized to discuss the proposed exposure multipliers (Fransman et
al., 2011).
37

The model consists of one algorithm to estimate the contribution from near-field (NF) [equation 1]
and one for estimating the contribution from far-field (FF) sources [equation 2]. Personal exposure
from a near-field source (Cnf) is a multiplicative function of substance emission potential (E), activity
emission potential (H), (primary) localized control (LC1), secondary localized control (LC2; in case two
localized controls are used simultaneously, and dispersion (D). The algorithm for a far-field source
(Cff) also includes segregation (Seg) and personal enclosure/separation (Sep).
The level of surface contamination (Su) for each activity depends on the location of the source, i.e.
whether there is (i) a near-field source only [equation 3], (ii) a far-field source only [equation 4], or
(iii) both near- and far-field sources [in which case the surface contamination in the near-field is
assumed to dominate that of the far-field, see equation 3].
38

Subsequently, the overall exposure is estimated by algorithm equation (5). The algorithm considers
multiple activities [and exposure time (texposure)] within an 8-h work shift (ttotal) and also allows
periods with assumingly zero exposure (tnon-exposure).
With regard to dispersion, the following assumptions are made:
• In case of outdoor mixing/loading, it is assumed that this takes places close to buildings
• In case of mixing/loading under a shelter/covering/roof, it is assumed that these conditions are
comparable to ‘outdoors – close to buildings’
• In case of indoor mixing, only good natural ventilation is assumed
For use within BROWSE, the above algorithms are included in the total algorithm for the estimation
of exposure during mixing loading. To do so, the relevant modifying factors within the ART
mechanistic model were considered relevant for the mixing & loading scenario. If possible, defaults
were chosen, and to do so, the relevant modifying factors per exposure scenario were identified.
It is assumed that far field exposure is not relevant for mixing & loading PPPs, since in practice one
operator is performing all the activities, and thus no secondary exposure is assumed. Also the
distance of the operator to the source is assumed to be <1 meter.
For the estimation of inhalation exposure with the ART model, it is necessary to take into account
the duration of the various activities that together form the mixing & loading scenario. To be able to
do so, assumptions are made with regard to the relative contribution of the various activities
(transport, opening/closing, decanting) to the total duration of a mixing & loading period, both for
solids and liquids (Table 14).
(b) Inhalation exposure estimates and testing
The inhalation model was not tested using the exposure dataset. However, the model has been
calibrated as described in Schinkel et al. (2011). The mechanistic model output provides a
(dimensionless) relative score for the GM exposure of a scenario and is fitted to exposure
39

measurements to ‘translate’ these scores to a quantitative exposure estimate in mg/m3 with the
following equation:
Yijk is the exposure level for the kth measurement within the jth company in the ith scenario. Xijk is the
ln-transformed exposure level; ln(α) is the intercept (natural logarithm of the slope on the natural
scale); δi represents the random effect of the ith scenario, cij represents the random effect of the jth
company in the ith scenario and εijk is the residual error term. It is assumed that δi, cij and εijk values
are normally distributed with mean equal to zero and variances representing the between-scenario,
between-company (or work-site), and within-company components of variance. The companies are
nested within scenarios. With this method the relative ART mechanistic model scores are still
proportional to actual exposure levels and importantly the effects of individual MFs are preserved.
The intercept (ln(α)) represents the estimated exposure if the ART model score is 1.
The calibration results presented in Table 15 are used to estimate inhalation exposure for mixing &
loading activities based on the relative ART-scores for specific scenarios (based on broad model).
The calibration provided insight into the uncertainty of the estimated GM for specific scenarios. This
uncertainty is expressed as an UF, and this UF is used to calculate confidence limits around the
estimated GM exposure.
The analyses indicate that the model could estimate with 90% confidence GM exposure levels within
a factor between two and six of the measured GM exposure levels (depending on the form of
exposure). The total percentage of explained variance is 61% for the abrasion exposure form (not
stated here), 64% for dust (non-abrasive), 60% for vapours (not stated here) and 30% for mist.
Two models were developed and presented below, i.e. ML liquids and ML solids.
3.2.3.1 Mixing and loading liquids
Main model and user inputs are presented in Tables 12 and 13. It is assumed that only low-volatile
substances are used in liquid formulations (in ART framework cut off point: vapour pressure <10 Pa),
and thus only exposure to mists is taken into account.
In case of mechanical application, inhalation exposure during the mixing of the diluted formulation
in the tank of the spray equipment is considered negligible, since it is assumed that this occurs in the
40

far field, with low-volatile substances, with relatively undisturbed surfaces (no aerosol formation)
and a limited open surface area (opening tank).
In case of liquid formulations it is assumed that a liter of liquid formulation weighs one kg
(comparable to water), to be able to use the concentration of active substance in the formulation (in
g/L) as the weight fraction (g/kg).
3.2.3.2 Mixing and loading solids
Main model and user inputs are presented in Tables 16. Dustiness classifications in ART were
adapted for pesticide formulations as shown in Table 17.
(a) Tables
Table 12: Mixing & loading liquids inhalation model - main user and model inputs*
No Model inputs Lower Upper Type Based on 1 Concentration of a.s. of formulation in
container/packaging, Cfcoi
(µg/l) 5
1000 selected value *
2 Viscosity (fixed medium) Fixed 0.3 - Fixed * 3 Partial vapour pressure - - fixed
10Pa/30000Pa *
4 M&L activities (3 categories) – (i) transport; (ii) opening & closing; (iii) emptying & pouring
- - Fixed *
5 Splash loading (emptying) Fixed 3 - Fixed * 6 Contaminated surface area (0,3-1m2)
(transport, opening&closing) Fixed 0.001 - Fixed *
7 Duration of activities (based on number of containers used * default time)
- - selected value *
8 (i) Indoor (natural ventilation, large room) or outdoors
(ii) Indoor (natural ventilation, small room) (iii) Outdoors (only close to building or under
shelter)
0.75 2.7 selected value *
9 Localized controls ((i) extraction (canopy hood) (0.5); (ii) extraction (other) (1); (iii) none (emptying only) (1), default = 1
0.5 1 selected value *
10 Use rate (l/min) ((based on total number of containers used * container size (l) / duration of activities (min)) (emptying only)
0.01 0.001 selected value *
11 Level of contamination (transport & opening/closing) (default of <10% of surface)
Fixed 0.1 - Fixed *
12 Level of containment (emptying only) 0.3 1 selected value * * Fransman et al 2011; Schinkel et al, 2011; Tielemans et al 2008 Table 13: Default values used for M&L (liquids) inhalation (ART) model for three activities
41

Parameter Description Transport Opening & dosing Emptying / pouring
Viscosity Low 1 1 1
medium 0,3 0,3 0,3
Use rate 10-100 l/min - - 0,01
1-101 l/min - - 0,003
0,1-1 l/min - - 0,001
Level of containment Open process - - 1
Product-to-air interface - - 0,3
Type of application Splash loading - - 3
Contaminated surface area 0,3-1m2 0,001 0,001 -
Level of contamination 10-90% of surface 0,3 0,3 -
<10% of surface 0,1 0,1 -
Localized controls None 1 1 -
Local ventilation - - 0,5
Dispersion Indoor large room 0,9 0,9 0,9
Indoor small room 2,7 2,7 2,7
Outdoor close to buildings 0,75 0,75 0,75
Surface contamination Housekeeping practices 0,01 0,01 0,01
Table 14: Use of duration in the M&L (liquids) inhalation model
Scenario/ activity Activity class ART Total mix / load period Assumed duration (in min)
Transport Handling of contaminated objects 1 min per event 1 min per container Opening / closing Handling of contaminated objects 0.5 min opening, 0.5
min closing 1 min per container
Pouring / emptying Transfer of liquid products – falling liquids 1.5 min per event 1.5 min per event
Table 15: Calibration results of the ART model
Exposure form ln(α) σ2bs (95% CI) a σ2
bc (95% CI) b σ2residual (95% CI) c σ2
total d
Dust 3.01 0.81 (0.25-1.36) 0.38 (0.12-0.64) 2.29 (2.03-2.55) 3.48
Mist 10.23 1.14 (0.17-2.10) 1.65 (0.94-2.36) 2.62 (2.06-3.18) 5.41 a between-scenario component of variance, CI = confidence interval b between-company component of variance c residual error component of variance d total variance
42

Table 16 Mixing & loading solids inhalation model - main user and model inputs*(see Appendix O for detailed information) No Model inputs Lower Upper Type 1 Concentration of a.s. of formulation in container/packaging,
Cfcoi
(µg/kg) Sample data Sample data selected value
2 M&L activities (3 categories) – (i) transport; (ii) opening & closing; (iii) emptying & pouring
- - fixed
3 Dustiness (see Table 17) 0.01 1.0 selected value 4 Moisture content Fixed 1 - fixed 5 Level of contamination - handling of slightly contaminated
(layers of less than few grams) objects (transport, opening & closing)
Fixed 0.03 - fixed
6 Carefulness of handling (transport, emptying); routine/normal Fixed 1 - fixed 7 Dropping height (drop height ≥ 0.5 m); emptying only Fixed 3 - fixed 8 Level of containment (open) Fixed 1 - fixed 9 Duration of activities
(based on number of containers used * default time) (see Table 3)
- - selected value
10 (i) Indoor (natural ventilation, large room) or outdoors (0.8991)
(ii) Indoor (natural ventilation, small room) (2.7) (iii) Outdoors (only close to building or under shelter) (0.75)
0.75 2.7 selected value
11 Localized controls ((i) extraction (canopy hood)(0.5); (ii) extraction (other) (1) ; (iii) none (emptying only), default = none (1)
0.5 1 selected value
12 Use rate (l/min) ((based on total number of containers used * container size (l) / duration of activities (min)) (emptying only) (i) Transferring 10-100 kg/min (3) (ii) Transferring 1-10 kg/min (1)
1 3 selected value
13 Surface contamination (housekeeping practices) Fixed 0.01 - fixed * Fransman et al 2011; Schinkel et al, 2011; Tielemans et al 2008
Table 17 Dustiness classification for M&L (solids) inhalation model
Description Classification (data, user interface) All activities# (i) Firm granules, flakes or pellets
Macro granule (GG) 0,01
(ii) Granules, flakes or pellets
Fine granule (FG) Wettable granule (WG)* Water soluble granule (SG)*
0,03
(iii) Coarse dust 0,1 (iv) Fine/course dust or powder
Wettable powder (WP)* (Water-soluble) powder for dry seed treatment (DS, SS) Flo-dust (GP) Dustable powder (DP)
0,3 (default)*
(v) Extremely fine and light powder NA 1 # transport; opening & closing; emptying / dumping * fine/course dust is considered reasonable worst case, to be applied as default
43

3.2.4 Mixing and loading dermal models
3.2.4.1 Mixing and loading liquids
(a) Description
This scenario includes mixing and loading (ML) of liquids during the ground boom, broadcast, hand-
held spraying and aerial spraying operations. Based on the different M&L procedures and the
available information and data, the following models were developed:
• Open pour to tank top or induction bowl
- Hands model
- Whole body (excl. hands) model
• Transfer with a mechanical transfer/coupling devices (MTD) fitted on induction bowls, incl. closed
transfer systems (CTS)
- Total body model (hands & body)
The following activities of an operator during the mixing & loading scenario were considered in the
model development:
• Transport / collection of containers
• Opening and closing of containers
• Emptying and decanting
• Using premixing containers and measuring jugs
The models emphasize the principle route of exposure as surface contacts with containers used.
Deposition of droplets during ML scenarios is assumed negligible.
The models use quantitative values derived from experimental data as mass balance inputs, i.e. (i)
surface contamination levels and/or (ii) body part contamination levels. These inputs differentiate
between ML methods, container sizes and probability of spillages for single-event ML activities. To
develop a mechanistic algorithm, other important parameters are included to estimate operator
dermal exposure, e.g. concentration of a.s. in the formulation, frequency of surface contacts,
transfer efficiency from surfaces to body and affected body parts.
44

Model 1a: Open pour to tank top or induction bowl
I Hand exposure model
The algorithm used to estimate dermal exposure during mixing and loading is based on two key
parameters associated with surface contacts as described by Gorman et al (2012), i.e. frequency of
contacts and surface contamination levels. The input parameters and ranges of the models are
presented in Table 16. In order to incorporate exposure through splashes and dripping, the model
algorithm includes experimental hand contamination data of a standardized emptying procedure of
the respective container sizes. Dermal hand exposure is first estimated per ML period (Dph_mlp) in
µg/hands, which is assumed a summation of hand-to-surface exposure to the container exterior
(Dph_container-ext, see item ii) and direct emission from splashes or dripping (Dph_es, see item iii).
Subsequently, if more than one ML period is relevant, the model estimates a total hand exposure for
multiple ML periods, expressed as (see algorithms). For this purpose, the frequency of hand contacts
with containers are used (item i).
(i) Frequency of surface contacts
The hand model applies event frequencies to provide an indication of surface contact frequencies.
The following event frequencies are included in the hand model:
• Surface contacts based on the total number of containers used incl. re-use (Ftnc)
• Number of ML periods (Fmlp) (assuming a worst case where the 1st container used during each
ML period is being re-used, unsealed and/or contaminated)
Ftnc is based on the number of containers used per ML period and gives an indication of the contact
events. The number of ML periods (Fmlp) is included in the algorithm to estimate the total number of
containers used per ML period. The total number of containers used per ML period (Ftnc/Fmlp) is
considered representative of contact events, with a distribution derived from the data of ≈1-15.
Ftnc and Fmlp is estimated with the tank size (l), final ML concentration of a.s. in spray volume (g/l),
container size (l), formulation concentration (g/l) and total spray volume applied (l).
The hand model algorithm includes the transfer efficiency from surface to the hands (Appendix H),
as well as the affected surface area of the hands involved in contacts (Appendix I).
The surface-to-hand transfer efficiency (Cf) is corrected to account for multiple contacts, expressed
as Cftot-container-ext (Appendix J).
45

(ii) Surface contamination levels
Surface contamination levels were derived from various experimental studies (Glass et al, 2009;
Gilbert et al, 2000; Mathers et al, 1999). The data distinguish between two ML methods (tank-top
and induction bowl pour) and four container sizes (1L, 5L, 10L, 20L).
Surface contamination levels (lower and upper range, Sccontainer-ext) were derived for the different
container sizes and expressed in different categories, each with a probability. The probabilities are
based on the probability frequencies in the experimental data (Table 17). The derived values are
therefore indicative and only provide information about the relative performance of the different
container sizes when used with a particular filling technique (Appendix G).
(iii) Spillages
In order to incorporate exposure through splashes and dripping, the model algorithm includes
experimental hand contamination data of a standardized emptying procedure. Hand contamination
levels (es) were derived from the available experimental studies assuming that a significant amount
of contamination occurred through spillages (using the standard CSL container pouring test) (Table
18). These values were derived for tank-top and induction bowl ML methods using the four
container size categories. Probability distributions of splashes occurring on the hands during the use
of different container sizes and ML methods are also available and included in the hand
contamination estimate. The derived values are based on limited experimental data and are only
indicative input of hand contamination levels in practice.
Model 1b: Open pour to tank top or induction bowl
II Whole body exposure (excl. hands) model
Whole body contamination levels (eopen pour) were derived from experimental studies for tank-top
pour and induction bowl pour ML methods using four container size categories (Table 19). These
values were derived from whole body contamination (coveralls) based on the standard CSL container
pouring test protocol (for the pouring into a simulated induction hopper). In the absence of data for
tank-top pouring, the latter values were adopted from induction bowl pouring. The derived values
are based on limited experimental data and are only indicative input of whole body contamination
levels in practice.
46

Model 2: Mechanical transfer devices (MTD) and closed systems
I Total body (incl. hands) exposure model
Limited data is available for mechanical transfer devices (MTD) and closed transfer systems (CTS).
These ML methods are also more complicated due to the wide range of systems used and protocols
followed for each system. The experimental data available distinguish between six systems, where a
number of the systems had a common design of valve connection to the pesticide kegs and dry
break coupling connecting the system to a mock sprayer.
In the absence of consistent experimental data for different body parts, it was decided to derive the
total operator contamination from all the available systems sampled, giving a rough estimate of
operator contamination (Table 19).
(b) Algorithms
Model 1: Open pour to tank top or induction bowl
I Hand exposure model (Dph)
Per M&L period
Dph_mlp = Dph_container-ext + Dph_es
Where
Dph_container-ext = Cfcoi * (Sccontainer-ext * Cftot_container-ext* BPhands * lcn/BPpalms))
Dph_es = Cfcoi * (es * (Ftnc/Fmlp))
𝐶𝑓𝑡𝑜𝑡_𝑐𝑜𝑛𝑡𝑎𝑖𝑛𝑒𝑟_𝑒𝑥𝑡 = � �𝐶𝑓 0.5��𝐹𝑡𝑛𝑐𝐹𝑚𝑙𝑝
�−1��
𝐹𝑡𝑛𝑐𝐹𝑚𝑙𝑝
𝑘=1
and 𝐹𝑡𝑛𝑐𝐹𝑚𝑙𝑝
≥ 1
𝐹𝑡𝑛𝑐𝐹𝑚𝑙𝑝
is always an integer ≥ 1 as Ftnc is an integer * Fmlp
Dph_container-ext Hand exposure from hand contacts with container exteriors ((µg/hands)
Dph_es Hand exposure from direct emissions such as splashes and dripping from containers
(µg/hands)
47

For combined ML periods Dph = Dph_mlp * Fmlp
Dph_mlp dermal hand exposure per ML period (µg/hands)
Sccontainer-ext surface contamination level for different container sizes and M&L methods (l/cm2)
Cfcoi concentration of a.s. in formulation / packaging (µg/l)
Ftnc total number of containers used incl. repeated use (Ftnc)
Fmlp number of ML periods
es hand contamination representing dripping/splashes after standard emptying
operation (separate for tank-top (es-tanktop) and induction bowl (es-induction bowl)
BP total surface area of hands (cm2)
lcn/BP affected surface area of hands (cm2 of BP)
Cf transfer efficiency from surface to the hands
Cftot-container-ext corrected transfer coefficient for multiple contacts (maximum: 0.89 with Cf = 0.45; 𝐹𝑡𝑛𝑐𝐹𝑚𝑙𝑝
= 6) (Appendix H)
Model 1: Open pour to tank top or induction bowl
II Whole body (excl. hands) exposure model (Dpw)
Dpw = Cfcoi * eopen pour * Ftnc
Dpw potential dermal exposure to a.s. in µg on the whole body (excl. hands)
Cfcoi concentration of a.s. of formulation in container/packaging (µg/l)
eopen pour whole body exposure during a standard emptying operation / per container used
(l/whole body) as per container size and ML method
Ftnc total number of containers used incl. re-use of un-emptied containers
Model 2: Mechanical transfer devices (MTD) using induction hoppers and closed transfer systems
(CTS)
I Total body (incl. hands) exposure model (Dpw)
Dpw = Cfcoi * emtd * Fmlp 48

Dpw potential dermal exposure to a.s. in µg on the total body (incl. hands)
Cfcoi concentration of a.s. of formulation in container/packaging (µg/l)
emtd indicative dermal exposure during the use of MTS and CTS per ML period (l/whole
body incl. hands)
Fmlp frequency of contacts as number of ML periods
(c) Model testing
Please refer to the type of plots/graphs and explanation under item 3.2. Also, the number of data
available for single and multiple M&L periods vary and are different in the respective plots.
Model 1: Open pour to tank top or induction bowl
I Hand exposure model
Only ML data was used (excl. application) to test the hand model. As shown in the algorithms, the
model first estimates hand exposure for a single ML period (Figure 13 & 14). As shown in Figure 14,
model estimates tend to over-estimate for the ML of boom sprayers and under-estimate for hand-
held spraying operations. However, this may be due to the imputed data used. The ML model then
estimates the exposures of all the ML periods combined (Figure 15 & 16), which includes ML data
with both single and multiple ML periods. Mixing & loading during hand-held spraying operations, in
particular, shows a high variability and broad range in exposures (also see Appendix K). The final
model estimates of all the ML periods combined (Figure 16) appear to be conservative but do not
capture the large variation in the exposure data. However, many of the outliers may be ascribed to
less reliable imputed datasets.
Model 1: Open pour to tank top or induction bowl
II Whole body exposure model
Testing of the whole body model with exposure data is plotted in Figures 15 and 16.
Model 2: Mechanical transfer devices (MTD) and closed systems
I Total body exposure model
Too few datasets are available to compare model outputs with data.
49

(d) Tables
Table 16: Mixing & loading dermal models - main user and model inputs*
No User inputs Model inputs Lower Upper Type Based on 1 Concentration of a.s. of
formulation in container/packaging (g/l)
Concentration of a.s. of formulation in container/packaging, Cfcoi (g/l)
5
1000 selected value
BROWSE data
2 Container size – 4 categories: ≤2,5l; >2,5l - <7,5l; 7,5l - <15l; >15l
Container size – 4 categories based on experimental data (1, 5, 10 & 20L)
0.5
25 selected value
Experimental studies Appendix G
3 M&L method (3 categories): - Tank-top (open) pour - Induction bowl (open)
pour - Mechanical
transfer/coupling devices (MTD) and closed transfer systems (CTS)
M&L method (3 categories)
- - selected value
Experimental studies Appendix G
4 n/a Container contamination levels, Sccontainer-ext
(l/cm2), incl. frequency distributions (Table 19)
2.0E-10 9.0E-7 uniform distributions
Experimental studies Table 17 Appendix G
5 n/a Hand exposure after standard emptying operation, es (l/hands), as per container size and M&L method, incl. frequency distributions (Table 20)
1.0E-6 2.0E-4 uniform distributions
Experimental studies Table 18 Appendix G
6 (Volume applied/tank volume) roundup
Frequency of contacts as number of M&L periods (Fmlp)
1 15 selected value
BROWSE data
7 (Volume applied, tank size, in-use concentration (Ccoi), container size, formulation concentration (Cfcoi)) roundup
Frequency of contacts as total number of containers used incl. repeated use (Ftnc)
1 45 selected value
BROWSE data
8 n/a Dermal exposure during the use of MTSs and CTS (l/total body), emtd,
1E-7 1.4E-3 uniform Experimental studies Table 19 Appendix G
9 n/a Body exposure (eopen pour) during standard operation per container (L/body) as per container size and M&L method (Table 21)
1E-7 2.0E-4 uniform Experimental studies Table 19 Appendix G
10 n/a Transfer efficiency from surface to the hands (Cf);
0.16 0.47 triangular distribution
IOM database Literature review
50

No User inputs Model inputs Lower Upper Type Based on
1st contact = 0.31; 2nd-6th contact (*0.5)
between 0.16 and 0.47 with a mode of 0.31
Appendix H&J
11 Gender (male/female) Surface area of hands, cm2 (BP) (testing: fixed male)
- lognormal distribution – see BS dermal model
Appendix I
12 n/a Fraction affected surface area of hands (palms) (lcn/BPpalms)
Fixed 0.42
- selected value
Appendix I Expert opinion
* models distinguish between container sizes and M&L methods
51

Table 17: Surface contamination levels (Sccontainer-ext,L/cm2)^ and associated frequency distributions
(%) derived for (manual) open pour M&L methods* for tank-top pour and induction bowl
pour using four container size categories
Tank-top category 1 category 2 category 3
lower Upper P* lower > upper < P* lower upper P*
ml/container 0,001 0,01 0,01 1 1 1,5 – 4,5
Container size (L)
1 2,00E-09 2,00E-08 70 2,00E-08 2,00E-06 30
5 6,00E-10 6,00E-09 35 6,00E-09 6,00E-07 40 6,00E-07 9,00E-07 25
10 4,00E-10 4,00E-09 5 4,00E-09 4,00E-07 60 4,00E-07 5,00E-07 35
20 2,00E-10 2,00E-09 5 2,00E-09 4,00E-07 50 4,00E-07 9,00E-07 45
Induction bowl category 1 category 2 category 3
lower Upper P* lower > upper < P* lower upper P*
ml/container 0,001 0,01 0,01 1 1 1,5 – 4,5
Container size (L)
1 2,00E-09 2,00E-08 70 2,00E-08 2,00E-06 30
5 6,00E-10 6,00E-09 25 6,00E-09 6,00E-07 70 6,00E-07 9,00E-07 5
10 4,00E-10 4,00E-09 35 4,00E-09 4,00E-07 60 4,00E-07 5,00E-07 5
20 2,00E-10 2,00E-09 10 2,00E-09 4,00E-07 55 4,00E-07 9,00E-07 35
* Frequency distributions
Container surface area (defaults, cm2)
1 600
5 1754
10 2785
20 4421 ^ Indicative ranges were derived from an analysis of surface contamination levels of different container sizes
after a standard pouring procedure (Mathers et al 2000, Gilbert et al, 1999; Gilbert et al, 2000, Glass et al, 2009). Indicative frequency probabilities were derived from Glass et al (2009)
52

Table 18: Hand contamination levels (es, L/hands) and frequency distributions (%) derived for
(manual) open pour M&L methods using four container size categories ~, tank-top and
induction bowl respectively
Tank-top category 1 category 2
lower Upper P* lower upper P*
Container size (L)
1 1,00E-06 1,00E-05 99 1,00E-05 2,00E-04 1
5 1,00E-06 1,00E-05 95 1,00E-05 2,00E-04 5
10 1,00E-06 1,00E-05 70 1,00E-05 2,00E-04 30
20 1,00E-06 1,00E-05 60 1,00E-05 2,00E-04 40
Induction bowl category 1 category 2
lower Upper P* lower upper P*
Container size (L)
1 1,00E-06 1,00E-05 99 1,00E-05 2,00E-04 1
5 1,00E-06 1,00E-05 99 1,00E-05 2,00E-04 1
10 1,00E-06 1,00E-05 80 1,00E-05 2,00E-04 20
20 1,00E-06 1,00E-05 70 1,00E-05 2,00E-04 30 ^ Indicative ranges were derived from an analysis of hand contamination levels during a standard
pouring procedure (Mathers et al 2000, Gilbert et al, 1999; Gilbert et al, 2000, Glass et al, 2009). Indicative frequency distribution were derived from Glass et al (2009)
53

Table 19: Whole body contamination levels (eopen pour) derived for (manual) open pour M&L methods
using four container size categories, and total body exposure during use of mechanical
transfer devices (emtd)
Category Container size (L) Whole body contamination (excl. hands) after open pour1, eopen pour (l/whole body)^
Total body contamination after using mechanical transfer devices (MTD)2, emtd (l/total body)^
Lower Upper Mean Lower Upper Mean* Lower Upper 1 0.5 2.5 1.0E-7 1.0E-8 1.0E-6 - - -
2 >2.5 7.5 1.5E-6 1.5E-7 1.5E-5 - - -
3 >7.5 15 5.0E-6 5.0E-7 5.0E-5 - - -
4 >15 25 2.0E-5 2.0E-6 2.0E-4 - - -
5 25 - - - 7E-5 1.0E-7 1.5E-3 1 derived from whole body contamination (coveralls) after a standard pouring procedure (induction bowl). These
values were also adopted for tank-top pour. Note: If raw data was not available for all combinations of methods and container sizes, values were adopted from other similar-sized container sizes
2 operator contamination based on different body parts depending on type of loading systems used. Measurements taken after one protocol of six different mechanical transfer devices including both induction hoppers and closed transfer systems (including volumes of 5l-25l)
^ Lower and upper ranges were derived using the mean values with a factor 0,1 and 10 respectively (as standard deviations could not be calculated from the studies)
Note Derived from: eopen pour (Mathers et al 2000, Gilbert et al, 1999, Gilbert et al, 2000; Glass et al, 2009) and emtd (Glass et al, 2009)
54

(e) Figures
Figure 13: Hand exposure: Plot of log10(potential dermal exposure (hands)*) and log10(geometric mean(model outputs)) (single M&L period) *including data sets which have model inputs that were imputed
0.01 0.1 1 10 100 1000 10000 100000 1e+06 1e+07 1e+080.01
0.1
1
10
100
1000
10000
100000
1e+06
1e+07
1e+08
log10 (Geometric mean(Model outputs(µg/hands)))
log 10
(Mea
sure
d po
tent
ial d
erm
al e
xpos
ure(
µg/h
ands
))
55

Figure 14: Hand exposure: Plot of 95% CIs (grey lines), geometric means (red lines) and medians
(black dashed lines) for the log10(model outputs) with the log10(measured potential dermal exposure (hands)*) (purple squares=boom sprayer, orange crosses=hand-held sprayers) (single M&L period) *including data sets which have model inputs that were imputed
0 10 20 30 40 50 601
10
100
1000
10000
100000
1e+06
1e+07
Index
log 10
(Pot
entia
l der
mal
exp
osur
e (µ
g/ha
nds)
)
56

Figure 15: Hand exposure: Plot of log10(measured potential dermal exposure (hands)*) and
log10(geometric mean(model outputs)) (all M&L periods combined) * including data sets which have model inputs that were imputed
0.01 0.1 1 10 100 1000 10000 100000 1e+06 1e+07 1e+080.01
0.1
1
10
100
1000
10000
100000
1e+06
1e+07
1e+08
log10 (Geometric mean(Model outputs(µg/hands)))
log 10
(Mea
sure
d po
tent
ial d
erm
al e
xpos
ure(
µg/h
ands
))
57

Figure 16: Hand exposure: Plot of 95% CIs (grey lines), geometric means (red lines) and medians
(black dashed lines) for the log10(model outputs) with the log10(measured potential dermal exposure (hands)*) (blue circles=aerial, purple squares=boom sprayer, red diamonds=broadcast sprayer, orange crosses=hand-held sprayers) (all M&L periods combined) * including data sets which have model inputs that were imputed
0 20 40 60 80 100 120 1400.01
0.1
1
10
100
1000
10000
100000
1e+06
1e+07
Index
log 10
(Pot
entia
l der
mal
exp
osur
e (µ
g/ha
nds)
)
58

Figure 17: Whole body exposure: Plot of log10(measured potential dermal exposure (body)) and
log10(geometric mean(model outputs)) (Red circles= datasets where no model inputs needed to be imputed; blue circles= data sets which have model inputs that were imputed) (all M&L periods combined)
0.01 0.1 1 10 100 1000 10000 100000 1e+06 1e+070.01
0.1
1
10
100
1000
10000
100000
1e+06
1e+07
log10 (Geometric mean (Model outputs(µg/body)))
log 10
(Mea
sure
d po
tent
ial d
erm
al e
xpos
ure(
µg/b
ody)
)
59

Figure 18: Whole body exposure: Plot of 95% CIs (grey lines), geometric means (red lines) and
medians (black dashed lines) for the log10(model outputs) with the log10(measured potential dermal exposure (body)*) (blue circles=aerial, purple squares=boom sprayer, red diamonds=broadcast sprayer, orange crosses=hand-held sprayers) (all M&L periods combined) * including data sets which have model inputs that were imputed
0 20 40 60 80 100 120 140 1600.001
0.01
0.1
1
10
100
1000
10000
100000
1e+06
1e+07
Index
log 10
(Pot
entia
l der
mal
exp
osur
e (µ
g/bo
dy))
60

3.2.4.2 Mixing and loading solids
(a) Description
The mixing and loading (ML) of solids scenario includes all operations where PPPs with a solid
formulation (e.g. granules or powders) are mixed and loaded. These mixing/loading operations may
occur in combination with for instance ground boom, broadcast, hand-held and aerial spraying
operations, but are considered a separate activity in view of estimating exposure. The following
models were developed:
• Manual handling and emptying solid formulations from packaging (≤25kg), which includes collection, carrying, opening/closing, weighing and scooping: - Hands model - Whole body (excl. hands) model
The models apply quantitative values derived from experimental data as mass balance inputs, i.e.
body part contamination levels. It is assumed that the most important routes of exposure associated
with dermal exposure are represented in the derived data, i.e. deposition on the skin and surface-to-
hand contacts.
Hand and body exposure models
The algorithm used to estimate dermal exposure during mixing and loading of solids (see paragraph
‘algorithms’) is based on experimental data (body part contamination values) in combination with
model input parameters such as the concentration of a.s. in the formulation, number of packaging
(e.g. bags/boxes) handled used per M&L period, amount of formulation used, dustiness of the
product, the use of local ventilation, wind speed and the body part surface areas (see Table 20).
(i) Body part contamination levels Indicative body part contamination levels were derived from an experimental study (Veldhof et al,
2006) with separate estimates for the hands (eh_w&e), arms (ea_w&e), torso (et_w&e) and legs (el_w&e). It is
assumed that the sub-activity of emptying (or dumping) of solids is the most important activity in
terms of dust emissions. As such, the experimental data used to derive body contamination levels
are based on a single emptying event of a given amount of product, but it also include a sequence of
other sub-activities such as collection, carrying, opening/closing of bags/boxes, and weighing and
scooping. The data distinguish between two key determinants of exposure, i.e. (1) the amount of
61

formulation used and (2) the dustiness of the formulation during single events (emptying). Based on
regression analysis, these two parameters were found to have the most significant effect on dermal
exposure (Veldhof et al, 2006). The experimental data include the following amounts used: 200g,
1kg, 5kg, 10kg and 15kg. Considering the detailed analysis of the data (Veldhof et al, 2006), four
categories were proposed for this exposure model (<1kg, 1,0-7,5kg, 7,5-12,5kg, >12,5-25kg).
The dustiness of the formulation type is categorized as granule, powder and fine powder.
The dustiness classification of the experimental test product was translated to a corresponding
classification of PPP products.
The contamination levels for hands, arms, torso and legs are presented in Table 20. The derived
values are indicative values based on limited data only. More details on the experimental set-up and
data derivation is presented in Appendix P.
(ii) Frequency of events
Both the hand and whole body models apply event frequencies that provide an indication of the
frequency that a single emptying event will occur. The following event frequencies are included in
the hand model:
• Total number of packaging used excl. re-use (Fnc) • Number of ML periods (Fmlp) Since the body part contamination estimates are based on experimental data during a single event
of emptying (a given amount of) solids, these contamination estimates are multiplied with the
number of these events in the model. To derive a body part contamination estimate based on the
‘amount used’ during a single event, a background calculation is used to estimate the amount of
product used per M&L period (and per packaging if multiple bags/boxes are used) (see background
calculations, Appendix L). For example, the hand contamination estimate (eh_w&e) is multiplied with
the number of packaging used per M&L period (Fnc/Fmlp). No evidence is available on how body part
contamination during a single event will increase with multiple M&L periods or use of multiple
packaging. In line with experimental skin loading studies (Appendix J), a skin loading constant (fdl) is
applied to simulate a gradual increase with multiple M&L periods (see algorithms).
(iii) Other factors
Although the experimental data used to derive hand contamination levels (eh_w&e) are corrected for
amounts used (<1kg – 25kg) and formulation type (granule, powder, fine powder), it does not take 62

account of potentially important parameters such as wind speed / air velocity (and wind direction)
and local exhaust ventilation (indoors). These parameters are included in the algorithm as shown in
Table 20.
Local exhaust ventilation was not used in the experimental study. Although extraction ventilation is
not commonly used during the mixing and loading of powders in the agricultural sector, the use of
LEV cannot not be excluded either. A distribution of efficiency values for local exhaust capturing
hoods (indoors) is proposed (i.e. efficacy values of 0.01-1) based on dumping activities in industry
(from approximately 55% effectiveness) (Marquart et al, 2003).
The experimental data represent exposure conditions of an indoor setting with relatively little
airflow and unknown wind direction. To account for uncertainty regarding dispersion that is caused
by wind speed and wind direction in diverse workplace settings (both indoors and outdoors), a broad
range of effects are proposed (both increasing as decreasing) depending on the wind direction.
Considering the limited information that will be available as model inputs, a broad distinction is
made between low wind speeds (≤1m/s; efficacy values of 0.3-3) and higher wind speeds of greater
than 1m/s (efficacy values of 0.1-10).
Distributions of body surfaces areas (BP, cm2) for hands, arms, torso/trunk and legs are included in
the algorithm, which differentiate between male and female distributions (see Appendix I). These
body surface areas roughly correspond to the body surface areas used in the experimental study on
which the body contamination levels are based. Based on the experimental data, it is assumed that
the exposure to the rest of the body is negligible (Appendix P).
(b) Algorithms
I Hand exposure model (Dph)
Per M&L period
Dph = Cfcoi * ((eh_w&e * BPhands* Fnc/Fmlp) * vlev * ws) (1)
M&L periods combined
Dpht = Dph * fdl (2)
where constant in fdl = 0.1 with each consecutive Fnc/Fmlp event (see previous runs with fdl)
63

Dph dermal hand exposure per M&L period (µg/hands)
Dpht total dermal hand exposure of all M&L periods combined (µg/hands)
Cfcoi concentration of a.s. of formulation in packaging (µg/kg)
eh_w&e hand contamination during handling and emptying activities (kg/cm2) based on the
amount used per emptying event (kg/event)
Fnc total number of containers used
Fmlp number of M&L periods (if Fnc/Fmlp <1 then equal to 1)
vlev local exhaust extraction (canopy) hood used (indoors)
ws wind speed, air velocity
BPhands surface area of the hands (cm2)
II Whole body exposure model (Dpb)
Per M&L period
Dpb = Cfcoi * (((ea_w&e * BParm + el_w&e * BPlegs + et_w&e * BPtorso) * Fnc/Fmlp) * vlev * ws) (1)
M&L periods combined
Dpbt = Dpb * fdl (2)
where constant in fdl = 0.1 with each consecutive Fnc/Fmlp event
Dph dermal whole body exposure per M&L period (µg/whole body) (assuming that only
the arms, torso and legs are potentially exposed)
Dpbt total dermal whole body exposure of all M&L periods combined (µg/whole body)
Cfcoi concentration of a.s. of formulation in packaging (µg/kg)
ea_w&e arm contamination during handling and emptying activities (kg/cm2) based on the
amount used per emptying event (kg/event)
el_w&e leg contamination during handling and emptying activities (kg/cm2) based on the
amount used per emptying event (kg/event)
et_w&e torso contamination during handling and emptying activities (kg/cm2) based on the
amount used per emptying event (kg/event)
Fnc total number of containers used
64

Fmlp number of M&L periods (if Fnc/Fmlp <1 then equal to 1)
vlev local exhaust extraction (canopy) hood used (indoors)
ws wind speed, air velocity (indoors & outdoors)
BParm surface area of the arms (cm2)
BPlegs surface area of the legs (cm2)
BPtorso surface area of the torso / trunk (cm2)
(c) Model testing Please refer to the type of plots/graphs and explanation under item 3.2. Note that the number of
data available for single and multiple M&L periods vary and are different in the respective plots.
I Hand dermal exposure model
Only ML data was used (excl. application) to test the hand model. As shown in the algorithms, the
model first estimates hand exposure for a single ML period, however, the data was plotted with
model outputs with all ML combined, as shown in the algorithms. As indicated in Figures 19 and 20
(hand models) and Figures 21 and 22 (whole body models), very little data is available to evaluate
the model outputs. Overall, it is clear that too little data is available to perform a proper testing to
evaluate the variance explained by the models. A few issues that may determine the accuracy of the
models are the sub-activities that are part of the exposure scenario of the experimental data
(weighing, scooping), that are not always relevant in the dataset with PPP exposure data as tested.
(d) Tables Table 20 Main user and model inputs * (also see Appendix P)
No User inputs Model inputs Lower Upper Type Based on 1 Concentration of
a.s. of formulation in container / packaging (mg/kg)
Concentration of a.s. of formulation in packaging, Cfcoi
(µg/kg)
from data
from data
selected value
BROWSE data
2 Amount used per packaging <=1kg >1kg - <7.5kg 7.5kg - <12.5kg >12.5kg – 25kg
Container size – 4 categories based on experimental data (200g, 1kg-5kg, 10kg, 15kg)
0.2
25 selected value
Experimental data (Appendix G)
3 Input required to Hand exposure after single # # Uniform Experimental
65

calculate: (i) amount used, (ii) product type^
scooping & emptying operation^, eh_w&e
(µg/cm2)
data, Table 2a Appendix G Appendix L
4 Input required to calculate: (i) amount used, (ii) product type^
Arms exposure after scooping & emptying operation^, ea_w&e
(µg/cm2)
# # Uniform Experimental data, Table 2 Appendix G Appendix L
5 Input required to calculate: (i) amount used, (ii) product type^
Legs exposure after scooping & emptying operation^, el_w&e
(µg/cm2)
# # uniform Experimental data, Table 2 Appendix G Appendix L
6 Input required to calculate: (i) amount used, (ii) product type^
Torso exposure after scooping & emptying operation^, et_w&e
(µg/cm2)
# # uniform Experimental data, Table 2 Appendix G Appendix L
7 (see parameters required in Appendix L)
Total number of containers used (Fnc)
1 from data / calcs
selected value
BROWSE data Appendix L
8 (see parameters required in Appendix L)
Number of M&L periods (Fmlp) (Fnc/Fmlp max 6 events)
from data
from data
selected value
BROWSE data
9 LEV used (indoors only)
Extraction capturing hood used (indoors only) (yes=0.45-0.01; no=1)
0.01 1.0 normal Marquart et al, 2003
10 Wind speed, direction (indoors & outdoors)
If ws ≤ 1m/s → 0.3 – 3.0; If ws > 1m/s → 0.1 – 10
0.1 10 uniform Expert opinion
11 Gender (male/female)
Surface area of body part, cm2 (hands=BPhands; arms=BParms; legs=BPlegs; torso/trunk=BPtorso); (testing: fixed male)
* * lognormal distribution
Appendix I*
# see Table 2a/b, dependent on formulation type, etc. ^ includes dustiness of product (granule, powder, fine powder)
66

(e) Figures Figure 19: Hand exposure: Plot of log10(measured potential dermal exposure (hands)*) and
log10(geometric mean(model outputs)) (all M&L periods combined)
*including data sets which have model inputs that were ‘complete’ (red) and imputed (blue)
67

Figure 20: Hand exposure: Plot of 95% CIs (grey lines), geometric means (red lines) and medians
(black dashed lines) for the log10(model outputs) with the log10(measured potential dermal
exposure (hands)*) (all M&L periods combined)
*including data sets which have model inputs that were ‘complete’ (red) and imputed (blue)
68

Figure 21: Whole body exposure: Plot of log10(measured potential dermal exposure (whole body)*) and log10(geometric mean(model outputs)) (all M&L periods combined)
*including data sets which have model inputs that were ‘complete’ (red) and imputed (blue)
69

Figure 22: Whole body exposure: Plot of 95% CIs (grey lines), geometric means (red lines) and
medians (black dashed lines) for the log10(model outputs) with the log10(measured potential
dermal exposure (whole body)*) (all M&L periods combined)
*including data sets which have model inputs that were ‘complete’ (red) and imputed (blue)
70

3.2.5 Orchard spraying inhalation model
(a) Description
Operator inhalation exposure is assumed to primarily originate from the spraying equipment that
releases airborne droplets during orchard spraying (OS) activities. The inhalation model focuses on
droplet spray and predicts the air concentration of droplets in the breathing zone of the operator
much like the Boom spraying model. This air concentration is converted to the air concentration of
the given active substance (a.s.) based on the concentration of a.s. in the spraying volume.
To estimate inhalation exposure of operators during Orchard spraying, the following three
mechanisms are considered (please see appendix A for more information):
• The airborne spray: The overspray factor is defined as the fractions of spray that remains
airborne between the tree rows of the orchard and to which the operator could get exposed.
Cross and colleagues1 2 3 found that the fraction of overspray is dependent on the spray quality
but not on the height of the trees, the application rate or the air flow. Based on the available
evidence the model predicts the total amount of overspray based on the spray quality and the
application rate only.
• The refreshment of air around the vehicle: As the vehicle moves forward it constantly drives into
fresh air. This effect is modeled by g refreshing the air around the vehicle at the rate of the
driving speed and a using a factor for the wind speed. The area of fresh air into which the vehicle
is moving is described by the vehicle height and the tree row spacing.
• The wake and dispersion toward the operator: The turbulence around the vehicle and spraying
equipment (in particular relevant for spray from nozzles close to the vehicle) will have an
1 Cross, J. V., P. J. Walklate, R. A. Murray, and G. M. Richardson. 2003. Spray deposits and losses in different sized apple trees from an axial fan orchard sprayer: 3. effects of air volumetric flow rate. Crop Protection 22 (2): 381-94 2 Cross, J. V., P. J. Walklate, R. A. Murray, and G. M. Richardson. 2001. Spray deposits and losses in different sized apple trees from an axial fan orchard sprayer: 1. effects of spray liquid flow rate. Crop Protection 20 (1): 13-30. 3 Cross, J. V., P. J. Walklate, R. A. Murray, and G. M. Richardson. 2001. Spray deposits and losses in different sized apple trees from an axial fan orchard sprayer: 2. effects of spray quality. Crop Protection 20 (4): 333-43
71

influence on the dispersion of spray from the spray equipment to the operator. Analysis of the
data showed that the wake and dispersion is well explained by using the vehicle size and vehicle
speed to describe the spray dispersion towards the operator.
Proposed model
The model consists of three parts that represents the three consecutive phases of the source-
receptor model:
(i) The airborne spray
(ii) Dispersion around the vehicle (Wake and air Refreshment)
(iii) Dispersion from spray around the vehicle to operator using cabin efficiencies (If)
Input variables of the model are represented in Tables 1 and 2.
(i) The airborne spray
The amount of spray emitted at the spray boom that potentially remains airborne around the vehicle
(that is not deposited on the trees or past the tree row as drift) is defined as the overspray. Based on
the spray quality, the fraction of spray that deposits on the ground between trees in relation to the
total volume sprayed rate. This fraction is called the overspray fraction. Together with the total
volume spray rate it provided the model input for the total amount of spray airborne around the
vehicle.
For determination of the total overspray:
- The spray volume rate (SPR) is used as input
- The fraction of spray that remains airborne between the tree rows (foverspray) is based on
experimental data. The foverspray value is derived for 3 spray qualities (medium, fine, very fine) and
is based on the fraction of spray that deposits on the ground in relation to the total airborne
spray. (Appendix A and Table 3).
(ii) Dispersion around the vehicle (Wake and air Refreshment)
The dispersion around the vehicle is described by two processes:
Firstly, the reduction of the air concentration of spray by air refreshment due to the driving of the
vehicle into fresh air and by the wind. The total amount of overspray is divided by the area over
which are refreshment takes place (perpendicular to the driving direction) multiplied by the vehicle
72

speed and 85% of the wind speed. The area is defined by the area made up by the vehicle height and
the row spacing of the trees. The 85 percentage of wind speed is assumed to describe the wind
direction that adds to the air refreshment (only the 15% more or less equal to the driving direction is
excluded).
The dispersion of spray from the spray equipment area to the rest of the vehicle is described by the
wake factor (wf) (a factor for the turbulence) and the dilution of spray over a volume described by
the vehicle distance category (d) (Table 5) and the vehicle speed (vvehicle). The vehicle speed is used
to describe the imaginable increased distance from the operator to the spray equipment due to
displacement of the operator away from the equipment during spraying.
(iii) Dispersion from spray around the vehicle to operator using cabin efficiencies (If)
Personal enclosures on vehicles (e.g. cabins) may affect the transfer of spray to the operator.
The categories proposed for cabins are presented in Table 7.
(b) Algorithms
Ipde = Cvehicle * If * Ccoi
Ipde Potential inhalation exposure concentration to the active substance (in droplet
spray) (g/m3)
Ccoi Concentration of a.s. in spray volume (g/l)
Cvehicle Concentration of droplet spray at the vehicle (l/m3)
If Cabin efficiency (factor)
where
Cvehicle = 𝐴𝑅 ∗ �𝑓𝑜𝑣𝑒𝑟𝑠𝑝𝑟𝑎𝑦�
𝐻𝑉𝑒ℎ𝑖𝑐𝑙𝑒 ∗ 𝑑𝑟𝑜𝑤 ∗ (vvehicle + 0.85 ∗ 𝑣𝑤𝑖𝑛𝑑)∗
𝑤𝑓(𝑑 + vvehicle)3
AR Application rate (L/s)
fairborne spray overspray fraction: fraction of spray volume that remains airborne between the tree
rows
73

Hvehicle Vehicle height (m)
drow Row spacing (m)
vvehicle vehicle speed (m/s)
vwind wind speed (m/s)
d vehicle distance category based on vehicle-mounted and self-propelled (VM) and
trailer-mounted (TM) rigs
wf wake factor
(c) Testing and calibration
Model Testing
Please refer to the type of plots/graphs and explanation under item 3.2. for the testing of the
Orchard Spraying inhalation model. Since no data points were complete for all the required inputs all
data are imputed. Imputed data were based on expected values compared to all other datapoints.
Figure 1 shows the model estimates plotted against all the available data. Figure 2 shows the model
estimated against the data points with confidence intervals. Due to the imputed data used for
testing, no conclusions can be drawn from the correlation found between the data and model
outputs, except that the models predict exposures in the overall expected range. Figures 3 shows
the same results but with increasing data values.
74

(d) Tables
Table 1: Orchard spraying inhalation model - input variables
Abbr Input variables Unit User input Model input From/for Cc.o.i. Concentration of
a.s. in spray liquid g/l User input User input Mass balance input
If Cabin efficiency (factor)
n/a (iv)No cabin (v) Cabin without
pressurized/filtered ventilation
(vi)Cabin with
pressurized/filtered ventilation
1 Sample from U(0.1, 0.25) with probability 0.25, from U(0.25, 0.5) with probability 0.5 and from U(0.5, 0.9) with probability 0.25 Sample from U(0.0001, 0.05) with probability 0.25, from U(0.05, 0.15) with probability 0.5 and from U(0.15, 0.3) with probability 0.25
Literature review Table 7 Appendix D
AR Application rate l/s User input User input foverspra
y
Overspray fraction
n/a Medium spray quality Fine spray quality Very fine spray quality Unknown
Sample from U(0.01-0.04) Sample from U(0.02-0.08) Sample from U(0.03-0.22) Sample from U)0.01-0.22) lognormal right skewed (mean at 0.05)
Literature review Table …… Appendix …..
Hvehicle Vehicle height m Categories: S, M, L, U, sSP, mSP, lSP, O
Sample from respective categories
drow Row spacing m Check in data User input Browse data vvehilce Vehicle speed m/s 1-8 m/s User input vwind Wind speed m/s 1-7 m/s User input d Vehicle distance
category m Categories: vehicle-
mounted and self-propelled (VM), trailer-mounted (TM), unknown (O)
Sampled from respective categories
Literature review Table 6 Appendix B
75

Table 2: Proposal cabin categories and associated multipliers/factors
Category Cabin Type % Cabin
efficiency Range (%)
Range (factor)
Lower Upper
A No cabin 1 n/a Fixed 1
B Cabin without pressurized/filtered
ventilation, OR with ventilation but
without filtration
60 10 - 90 0.1 0.9
C Cabin with pressurized/filtered
ventilation*
90 70 - >99 0.0001 0.3
1 based on literature review (Appendix D)
* criteria will be used in the user interface to verify ventilation & filtration compliances (ASAE
S-525)
Table 3: Overspray fraction
1 based on literature review (Appendix …..)
Table 4: Vehicle Height
Spray quality1 Code Overspray factor Range (factor) *
Lower Upper
Medium M 0.025 0.01 0.04
Fine F 0.05 0.02 0.08
Extra fine XF 0.125 0.03 0.22
Unknown 0 0.05 0.01 0.22
Type Code Length, distance^
(range, m)
Range (factor) *
Lower Upper
No Cabin A 1.5 1 2
Cabin B,C 2.5 2 3
Unknown O 2 1 3
76

Table 5: Length / distance categories based on vehicle and spraying rig configurations1
1 based on literature review (Appendix B)
(e) Figures
Figure 1: Inhalation exposure: Plot of the (fitted) log10(data) and log10(mean(model outputs))
Figure 2: Inhalation exposure: Plot for the lo10(fitted model outputs) with the log10(data) for the
complete datasets (with increasing model values). (Plot of 95% CIs (grey lines), means (red lines),
medians (black lines), and imputed datasets (blue dots).
1e-06 1e-05 0.0001 0.001 0.01 0.1 1 10 1001e-06
1e-05
0.0001
0.001
0.01
0.1
1
10
100
log10 (Mean(Model outputs(µg/l)))
log 10
(Dat
a(µg
/l))
Type Code Length, distance^
(range, m)
Range (factor) *
Lower Upper
Vehicle-mounted and
self-propelled VM 3.5 1 6
Trailer-mounted TM 8 4 12
Unknown O 6.5 1 12
77

figure 3: Inhalation exposure: Plot for the lo10(fitted model outputs) with the log10(data) for the
complete datasets (with increasing data values). (Plot of 95% CIs (grey lines), means (red lines),
medians (black lines), and imputed datasets (blue dots).
0 10 20 30 40 50 60 70 80 90 1001e-06
1e-05
0.0001
0.001
0.01
0.1
1
10
Data index
log 10
(Mod
el o
utpu
ts (µ
g/l))
0 10 20 30 40 50 60 70 80 90 1001e-06
1e-05
0.0001
0.001
0.01
0.1
1
10
log 10
(Mod
el o
utpu
ts (µ
g/l))
78

3.2.6 Orchard spraying dermal models
Description
The Orchard spraying dermal models consist of a hand model (Dph) and whole body model (Dpw). The
following activities of an operator during the orchard spraying scenario are included:
• Operating the vehicle (vehicle cockpit with & without cabin)
• Stepping into/out of vehicle (contact with the vehicle interior & exterior)
• Incidental activities with the spraying rig, adjustment of spraying rig and maintenance of
nozzles.
The models consider important determinants of dermal exposure associated with orchard sprayer
operations, e.g. type of spraying equipment (trailer, rear-mounted), the size of the spraying activity
and number of application tasks. The model predicts the exposure based on 2 routes of exposure:
deposition from airborne spray and surface contacts with contaminated surfaces. As high dermal
exposures are associated with incidental activities with contaminated spraying rigs and nozzles (as
opposed to the vehicle cockpit), the model includes both the vehicle cockpit and spraying rig as
sources of exposure for the surface contact route. The cleaning of vehicles and spraying equipment
are not included as a parameter in the models because the effect of this activity on exposure is not
known.
Hand model
Deposition
The deposition of spray on the hand is modelled by using vehicle contamination data. It is assumed
that the contamination of the control area (cabin or vehicle controls) of the vehicle occurs through
spray deposition only. The amount of deposition on this part of the vehicle is assumed to deposition
on the upper parts of the hands of the operator as well. (the palms will be more exposed to surfaces
rather than spray deposition). Deposition of spray on the hand therefore is only assumed to occur on
the top of the hands and their respective surface area (BPapplicationtop) (Appendix H). The level of
exposure due to deposition is calculated directly from the relevant vehicle contamination levels
(Table 7 and Appendix E) and the exposed surface area. The last term of the hand exposure model
algorithm represents the deposition.
79

�𝑆𝑐𝑐𝑜𝑐𝑘𝑝𝑖𝑡 ∗ 𝐶𝑐𝑜𝑖 ∗ 𝐼𝑓 ∗ 𝐵𝑃ℎ𝑎𝑛𝑑𝑠 ∗ 𝑙𝑐𝑛
𝐵𝑃𝑎𝑝𝑝𝑙𝑖𝑐𝑎𝑡𝑖𝑜𝑛𝑇𝑜𝑝�
Surface contacts
The algorithm used to estimate dermal exposure during orchard spraying is based on two key
parameters associated with surface contacts as described by Gorman et al (2012), i.e. frequency of
contacts and surface contamination levels. The input parameters and ranges of the models are
presented in Table 6.
(iv) Frequency of surface contacts
The hand model applies event frequencies to provide an indication of surface contact frequencies.
The following event frequencies are included in the hand model (see Table 6):
• Surface contacts with the vehicle cockpit exterior is represented by events of stepping into/out
of the vehicle, i.e. the number of mixing & loading periods (Fmlp) and number of times leaving
the vehicle during trouble-shooting or nozzle maintenance (Fnr)
• Surface contacts with the delivery system/rig is represented by (i) trouble-shooting and nozzle
maintenance events (Fnr) and (ii) incidental contacts such as (de-)mounting and boom
(un)folding prior to and after spraying (Frig)
The mixing & loading periods (Fmlp) are estimated from the volume applied and the tank volume. The
volume applied parameter is estimated from user inputs and are based on the total area sprayed
(Ha), dose (kg/Ha) and final mixing & loading concentration (g/l).
Since no information on the frequency of nozzle maintenance and incidental contacts was available,
defaults from boom spraying were adopted. These are between 0 and a worst case of 15, with a 90%
probability of between 0 and 5 and 10% probability of between 6 and 15.
Other events that may occur prior to or after spraying activities include nozzle replacement and
boom adjustment. A fixed event frequency with the rig and nozzles before and after spraying (Frig) is
set at 1. Frig are not included as user input assuming that this is not a known input.
(v) Surface contamination levels
The surface contamination level (µg/cm2 of a.s.) on field sprayers are highly variable and limited
evidence is available on the determinants influencing the deposition on vehicle and sprayer surfaces
80

of field sprayers. Ideally the surface contamination levels should be derived from data for different
vehicle-sprayer configurations, different spray qualities, etc. However, this information is only
available in a few specific settings (e.g. Balsari & Marucco, 2003). As result, it was decided to use a
broad range of contamination levels as input for the model (Table 7 & Appendix E). For this purpose,
contamination levels are based on four ‘Volume applied’ categories based on the percentage of the
total spray volume that deposits on the vehicle and delivery system.
As the surface contamination level estimate on the vehicle cockpit concerns the vehicle exterior, a
cabin efficiency factor is also included. The effect sizes proposed for cabin efficiency in the orchard
and boom spraying inhalation model are adopted for this model (Error! Reference source not
found.).
In addition, the transfer efficiency from surfaces to body parts (Cf) (Appendix H), body surfaces areas
(BP) and the affected surface area of body parts (lcn/BP) (Appendix I) are included in the algorithm.
The surface-to-hand transfer efficiency (Cf) is corrected to account for multiple contacts, for both
contacts with the cockpit (Cftot_cockpit) and rig (Cftot_Rig) (Appendix J). Surface contact are only assumed
to occur with the palms of the hands (BPpalms) (Appendix H).
Whole body (excl. hands) model
To estimate the whole body dermal exposure, it is assumed that whole body exposure occurs only
due to deposition during application. The mechanism for whole body deposition is similar as for the
hand model except it is applied to the whole body surface area. Whole body exposure during
incidental contacts might be relevant but where excluded from the models due to a lack of data.
Moreover the relatively high air-concentration during application (compared to for example boom
spraying) make other sources of exposure less significant. Whole body exposure during stepping in
and out of the vehicle is also not modelled partly because exposure to the whole body seems less
likely during this activity.
Algorithms
I Hand exposure model (Dph)
𝐷𝑝ℎ = ��𝑆𝑐𝑐𝑜𝑐𝑘𝑝𝑖𝑡 ∗ 𝐶𝑐𝑜𝑖 ∗ 𝐶𝑓𝑡𝑜𝑡_𝑐𝑜𝑐𝑘𝑝𝑖𝑡� + �𝑆𝑐𝑓𝑎𝑛 ∗ 𝐶𝑐𝑜𝑖 ∗ 𝐶𝑓𝑡𝑜𝑡_𝑟𝑖𝑔�� ∗ �𝐵𝑃ℎ𝑎𝑛𝑑𝑠 ∗ 𝑙𝑐𝑛𝐵𝑃𝑝𝑎𝑙𝑚𝑠
�
+ �𝑆𝑐𝑐𝑜𝑐𝑘𝑝𝑖𝑡 ∗ 𝐶𝑐𝑜𝑖 ∗ 𝐼𝑓 ∗ 𝐵𝑃ℎ𝑎𝑛𝑑𝑠 ∗ 𝑙𝑐𝑛
𝐵𝑃𝑎𝑝𝑝𝑙𝑖𝑐𝑎𝑡𝑖𝑜𝑛𝑇𝑜𝑝�
81

𝐶𝑓𝑡𝑜𝑡_𝑐𝑜𝑐𝑘𝑝𝑖𝑡 = � �𝐶𝑓 0.5(𝑘−1)�
𝐹𝑚𝑙𝑝+𝐹𝑛𝑟
𝑘=1
𝐶𝑓𝑡𝑜𝑡_𝑟𝑖𝑔 = � �𝐶𝑓 0.5(𝑘−1)�
𝐹𝑛𝑟+𝐹𝑟𝑖𝑔
𝑘=1
𝐶𝑓𝑚𝑎𝑥 = ��𝐶𝑓 0.5(𝑘−1)�𝐹=6
𝑘=1
Dph potential dermal exposure to a.s. in µg on the hands
Sccockpit surface contamination levels (l/m2) of cockpit
Ccoi concentration of a.s. in spraying volume (ug/l)
Cftot_cockppit corrected transfer coefficient for multiple contacts (maximum: 0.89 with Cf =
0.45; Fmlp + Fnr = 6)
Scfan surface contamination levels (l/m2) of the fan
Cftot_rig corrected transfer coefficient for multiple contacts (maximum: 0.89 with Cf =
0.45; Fnr + Frig = 6)
BPhands total surface area of hands (m2)
lcn/BPpalms affected surface area of hands (m2 of BP) (palms)
If cabin factor
Cfmax corrected transfer coefficient for a maximum amount of contacts
(0.89 with Cf = 0.45: F= 6)
lcn/BPApplicationTop affected surface area of hands (m2 of BP) (top of hands)
Cf transfer coefficient from surface to the hands
FmLp number of mixing & loading periods
Fnr number of nozzle maintenance events
Frig frequency of incidental contacts with the rig/boom
Rationale
(FmLp + Fnr) represent the frequency of surface contacts with the vehicle cockpit (Sccockpit) when
stepping into/out of the vehicle during trouble-shooting and mixing & loading
periods
82

(Fnr + Frig) represent the frequency of surface contacts with the delivery system/rig (Scrig)
during trouble-shooting and incidental contacts ((de-)mounting, boom folding) prior
to and after spraying
II Whole body (excl. hands) exposure model (Dpw)
The following equation is used to estimate the potential dermal exposure (Dpw) of the whole body in
ug:
𝐷𝑝𝑤 = 𝑆𝑐𝑐𝑜𝑐𝑘𝑝𝑖𝑡 ∗ 𝐶𝑐𝑜𝑖 ∗ 𝐼𝑓 ∗ 𝐵𝑃𝑤ℎ𝑜𝑙𝑒 𝑏𝑜𝑑𝑦
Dpw potential dermal exposure to a.s. in µg on the whole body excluding hands
Sccockpit surface contamination levels (l/m2) of cockpit
Ccoi concentration of a.s. in spraying volume (ug/l)
BPwhole body total surface area of the whole body (m2)
Model testing
Please refer to the type of plots/graphs and explanation under item 3.2
I Hand exposure model (Dph)
The available data is not suitable for testing the Orchard spraying hand model, because of data gaps
of important parameters. For example, the number of contact events with the nozzles is not known
in the data. Assuming a frequency of nozzle maintenance (Fnr) of 90% probability between 0 and 5
and 10% probability between 6 and 15, the model predicts a conservative exposure compared to the
broad range of data (figure 4 and figure 5).
A default nozzle maintenance frequency is set at 3 in the software. Unfortunately, inputting a
distribution for nozzle events will not be feasible as the probabilistic output of the model (using
iterations) will not be able to produce a single estimate with repeated runs of the model.
II Whole body (excl. hands) exposure model (Dpw)
The whole body exposure model was compared with the dataset using the deposition of spray on
the operator body (either inside or outside the cabin) only (figure 6 and figure 7).
83

(f) Tables
Table 6: Orchard spraying dermal models - main user and model inputs*
abbr User inputs Model inputs Lower Upper Type Based on
Cc.o.i Concentration of a.s.
in spray volume (g/l)
Concentration of
a.s. in spray
volume (g/l)
0.05 50 selected value BROWSE data
Volume applied
(estimated from total
area sprayed, dose,
final mixing&loading
concentration)
Volume applied (l),
4 categories
50 25000 selected value BROWSE data
Sccockpit n/a Cockpit surface
contamination
levels (l/m2)
0.001 0.25 uniform
distributions
Field trial data
Table 11
Appendix E
Scrig n/a Rig surface
contamination
levels (l/m2)
0.036 0.25 Uniform
Distributions
Field trial data
Table 11
Appendix E
Fmlp Number of M&L
periods (estimated
with volume applied
and tank size)
Number of M&L
periods (tankfulls
applied)
1 20 selected value BROWSE data
Fnr Frequency of nozzle
maintenance (Fnr);
user selected: 0 - 5;
>5;
default in software = 3
Frequency of
nozzle
maintenance;
(With 90%
probability
between 0-5) (for
testing with data
only)
0 5 Sample from
discrete uniform
distribution
between 0 - 5
Field studies
Frig n/a Frequency of
contacts with rig
Fixed
at 1
- Fixed Expert opinion
Field studies
84

abbr User inputs Model inputs Lower Upper Type Based on
prior to/after
spraying
Cabin factor (3
categories)
Cabin factor (3
categories with
ranges)
0.0001 1 see inhalation
model
Literature
review
Table 8
Appendix D
Vehicle or trailer
mounted (3 categories
– VM, TM, O-
unknown))
Vehicle-sprayer
length (d)
Vehicle-mounted
(0.1 – 0.9)
Trailer-mounted
(0.01 - 0.25)
Front-fitted booms
fixed at 1
0.01
1 uniform
distributions
Field trial data
Table 6
Appendix B
Cf n/a Transfer efficiency
from surface to the
hands (Cf); e.g. 1st
contact = 0.45; 2nd-
6th contact (*0.5);
see text
0.23 0.68 triangular
distribution
between 0.23
and 0.68 with a
mode at 0.45
IOM database
Literature
review
Appendix H &
J
BPhands Gender (male, female) Surface area of
hands (m2)
- - lognormal
distributions
(Males: log(SA)
~ Normal (-
2.2319,
0.109922)
Females: log(SA)
~ Normal(-
2.4313,
0.10362))
Appendix I
85

abbr User inputs Model inputs Lower Upper Type Based on
BPwholeb
ody
Gender (male, female) Surface area of the
whole body (m2)
- - Lognormal
distributions
(Males:
Appendix I
LCn/
BPapplicati
on top
n/a Fraction of
affected surface
area of hands (top)
Fixed
0.5
- Fixed Literature
review
Appendix I
lcn/
BPpalms
n/a Fraction affected
surface area of
hands (palms)
Fixed
0.5
- Fixed Literature
review
Appendix I
* Models distinguish between Volumes applied and contamination levels of different surfaces
Table 7: Surface contamination levels using Volume Applied categories
Category Volume applied Contamination level cockpit,
Sccockpit (l/m2)*
Contamination level delivery
system/rig, Scrig (l/m2)*
Lower Upper Lower Upper Lower Upper
1 <50 500 0.001 0.025 0.036 0.25**
2 500 1000 0.003 0.051 0.18 0.25**
3 1000 3000 0.006 0.152 0.25** 0.25**
4 3000 >10000 0.017 0.25** 0.25** 0.25**
* broad categories extrapolated from orchard sprayer contamination studies using the % of total spray volume depositing on the vehicle and delivery system (e.g. Balsari & Marucco, 2003, Ramwell et al, 2005, Michielsen et al, 2012).
** A maximum surface loading of 0.25 liters per square meter is assumed
86

(g) Figures
Figure 4: Hand exposure: Plot of log10(measured potential dermal exposure (hands) and
log10(geometric mean(model outputs)). Assuming a 90% probability of 0-5 nozzle maintenance
events. All data sets included imputed values.
0.1 1 10 100 1000 10000 100000 1e+060.1
1
10
100
1000
10000
100000
1e+06
log10 (Mean(Model outputs(µg/hands)))
log 10
(Dat
a(µg
/han
ds))
87

Figure 5: Hand exposure: Plot of 95% CIs (grey lines), geometric means (red lines) and medians
(black dashed lines) for the log10(model outputs) with the log10(measured potential dermal
exposure (hands). Assuming a 90% probability of 0-5 nozzle maintenance events. All data sets
included imputed values.
0 20 40 60 80 100 120 1400.1
1
10
100
1000
10000
100000
1e+06
Data index
log 10
(Mod
el o
utpu
ts (µ
g/ha
nds)
)
88

Figure 6: Whole body exposure: Plot of log10(measured potential dermal exposure (body) and
log10(geometric mean(model outputs). All data sets included imputed values.
10 100 1000 10000 100000 1e+06 1e+0710
100
1000
10000
100000
1e+06
1e+07
log10 (Mean (Model outputs(µg/body)))
log 10
(Dat
a(µg
/bod
y))
89

Figure 7: Whole body exposure: Plot of 95% CIs (grey lines), geometric means (red lines) and
medians (black dashed lines) for the log10(model outputs) with the log10(measured potential
dermal exposure (body). All datasets included imputed values.
3.2.7 Handheld Application inhalation model
(a) Description
The hand-held application (HHA) scenario represents an operator applying PPP by using a spray
lance or gun either connected to a tank by a hose, or connected to a backpack The HHA model
accounts for indoor (greenhouses) as well as outdoor (soft fruit trees, vineyards, vegetables crops,
etc.) environments.
Operator inhalation exposure is assumed to primarily originate from the spraying equipment that
releases airborne droplets HHA activities. The inhalation model focuses on droplet spray and
predicts the air concentration of droplets in the breathing zone of the operator much like the Boom
and Orchard spraying models. This air concentration is converted to the air concentration of the
given active substance (a.s.) based on the concentration of a.s. in the spraying volume. For the use of
the ART model, it was assumed that far field exposure is not relevant for mixing & loading PPPs,
0 20 40 60 80 100 120 140 160 180 200
100
1000
10000
100000
1e+06
Data index
log 10
(Mod
el o
utpu
ts (µ
g/bo
dy))
90

since in practice one operator is performing all the activities, and thus no secondary exposure is
assumed. Also the distance of the operator to the source is assumed to be <1 meter.
Furthermore, it is assumed that only low-volatile substances are used liquid formulations (in ART
framework cut off point: vapour pressure <10 Pa), and thus only exposure to mists is taken into
account. In case of liquid formulations it is assumed that a litter of liquid formulation weighs one kg
(comparable to water), to be able to use the concentration of active substance in the formulation (in
g/L) as the weight fraction (g/kg).
With regard to dispersion, the following assumptions are made:
• In case of outdoor application, it is assumed that this takes places close to buildings
• In case of application under a shelter/covering/roof, it is assumed that these conditions are
comparable to ‘outdoors – close to buildings’
• In case of application inside greenhouses only good natural ventilation is assumed
Main ART model inputs (default values) are presented in Table 1.
(b) Model testing
The model was tested with a dataset containing empirical data from which the ART score was
derived for each observation (e.g. weight fraction) along with the measured output (e.g. inhalation
exposure). The dataset used to test the model contained more than 600 data points. Where this was
the case, the missing inputs were imputed by empirical sampling from existing values in the available
data. To summarize the output, the geometric mean, median, 2.5th percentile and 97.5th percentile
were calculated. Thereafter, the geometric mean of the output against the true measured values
with 95% confidence intervals, medians and geometric means of the output against the true values
(all on log10 scale) were plotted for comparison. For each sub-scenario, 10,000 iterations were used.
The models were only compared or tested with available exposure data. Thus no calibration or
transforming/fitting was performed.
Results from the model testing are presented in figures 1 to 4. For all the sub-scenario, The y-axis
represents the measured potential inhalation exposure. The x-axis represents the geometric mean of
91

the model outputs. Blue dots indicate imputed values, red dots indicate that art scores were
available.
Figures 1 to 4 show the result of the model testing. Art default values for HHA air concentration
(Table 1) were tested against measured data representative of HHA application activities.
(c) Tables
Table 1: Default values used for HHA Inhalation (ART) model
Modifying factor Relevant parameter(s) Description Multiplier Coupling with BROWSE user inputs
Substance emission potential (E)
Viscosity Low viscosity (like water) 1.0 Relate to formulation type (EC, SC) division into categories Default
E = 10/30000 * 1.0 *
weight fraction
Weight fraction % active substance in spray liquid
Exactly Is considered to be known (input), or can be derived from other known information like the formulation, the amount used, etc.
Activity emission potential (H)
Use rate High application rate (> 3 L/min)
3
Spray application of liquids – surface
Moderate application rate (0.3-3 L/min)
1 Default
spraying of liquids Low application rate (0.03-0.3 L/min)
0.3
H= 1 * 3 * 1 Very low application rate (<0.03 L/min)
0.1
Direction of application Any direction (including upward)
3 Default Spray technique Spraying with no or low
compressed air use 1 Default
Localized controls (LC) LC=1.0
No localized controls No localized controls 1.0 Default
Dispersion (D)
Indoor: Room volume and air changes per hour
Natural ventilation, large room volume (greenhouse)
0.8991
Indoor: D=0.90 Outdoor: D=0.2 Outdoor: Distance of the Far from buildings 0.2 Default source from buildings Close to buildings 0.75 Surface contamination (Su) Su=0.01
Housekeeping practices (Default level: no specific cleaning practices, no protective clothing that repel spills, process not fully enclosed)
0.01 Default
92

(d) Figures
Figure 1. Inhalation exposure. Plot of the log10 (geometric mean of the concentration of a.i. in air*) against the log10 (measured inhalation exposure(both in ug/m3)). Blue dots indicate imputed values, red dots indicate that art scores were available. (Backpack Downwards scenario) *including a dataset which have art model inputs that were imputed
Figure 2. Inhalation exposure. Plot of the log10 (geometric mean of the concentration of a.i. in air*)
against the log10 (measured inhalation exposure(both in ug/m3)). Blue dots indicate imputed values, red dots indicate that art scores were available. (Backpack Up and Downwards scenario) *including a dataset which have art model inputs that were imputed
1e-05 0.0001 0.001 0.01 0.1 1 10 100 1000 10000 1000001e-05
0.0001
0.001
0.01
0.1
1
10
100
1000
10000
100000
log10(GM of concentration in air (µg/m3))
log 10
(Dat
a(µg
/m3 )
)
1e-05 0.0001 0.001 0.01 0.1 1 10 100 1000 10000 1000001e-05
0.0001
0.001
0.01
0.1
1
10
100
1000
10000
100000
log10(GM of concentration in air (µg/m3))
log 10
(Dat
a(µg
/m3 )
)
93

Figure 3. Inhalation exposure. Plot of the log10 (geometric mean of the concentration of a.i. in air*)
against the log10 (measured inhalation exposure(both in ug/m3)). Blue dots indicate imputed values, red dots indicate that art scores were available. (Gun and Hose Downwards scenario) *including a dataset which have art model inputs that were imputed
Figure 4.Inhalation exposure. Plot of the log10 (geometric mean of the concentration of a.i. in air*) against the log10 (measured inhalation exposure(both in ug/m3)). Blue dots indicate imputed values, red dots indicate that art scores were available. (Gun and Hose Up and Downwards scenario) *including a dataset which have art model inputs that were imputed
1e-05 0.0001 0.001 0.01 0.1 1 10 100 1000 10000 1000001e-05
0.0001
0.001
0.01
0.1
1
10
100
1000
10000
100000
log10(GM of concentration in air (µg/m3))
log 10
(Dat
a(µg
/m3 )
)
1e-05 0.0001 0.001 0.01 0.1 1 10 100 1000 10000 1000001e-05
0.0001
0.001
0.01
0.1
1
10
100
1000
10000
100000
log10(GM of concentration in air (µg/m3))
log 10
(Dat
a(µg
/m3 )
)
94

3.2.8 Handheld Application Dermal model
(a) Description
Previous studies suggest that the fraction of the applied volume available for deposition onto the
worker, as well as the body surface area affected will be influenced by the spraying direction
(Brouwer et al. (2001); Berger-Preiss et al. (2005) Hughes et al. 2008) Leona et al. 1992) Marquart,
(2003)). Likewise, the equipment used will determine the degree of exposure as well as the
distribution of contamination over the operator body. (Dosemeci (2002); Leonas et al. (1992);
Machera (2003); Matuo & Matuo (1998); Nuyttens (2009); Sanjrani (1990); Wicke (1999))
Therefore, the HHA model describes four sub-scenarios based on the application direction and the
equipment used, for which separate models for hand PDE and whole body (excluding hands) PDE are
developed. The following sub-scenarios are distinguished:
1. Backpack – Downward spraying: The application method consists of a handheld spray lance
or gun connected to a backpack or knapsack. The spraying direction is exclusively
downwards because the crop is shorter than the average height of the hands above the floor
(0.7m), or because the type of treatment does not require upwards application (e.g.
herbicides).
2. Backpack – Up- and Downward spraying: This scenario includes crops higher than 0.7m, for
which the application direction can be downwards, horizontal and/or upwards. The
application method consists in a handheld spray lance or gun connected to a backpack or
knapsack.
3. Gun and hose – Downward spraying: The application method consists in a handheld spraying
lance or gun connected to a tank by a hose. The tank can be either fixed or tractor mounted.
The spraying direction is exclusively downwards since the crop height or the type of
treatment does not require upwards application.
4. Gun and hose – Up- and Downward spraying. This scenario involves handheld application on
crops higher than 0.7m by using a spraying gun or lance connected to a fixed or mobile tank
95

by a hose. This scenario includes crops higher than 0.7m so that the application direction can
be downwards, horizontal and/or upwards.
Operator dermal exposure originates from the spraying equipment that releases airborne droplets
during HHA activities. A certain fraction of the spray will deposit over the operator hands and body.
Upon incidental contact with the crop a percentage of the volume applied will be transferred from
the crop to the operator. Likewise, the fraction deposited on the equipment can be transferred to
the operator hands or body by direct contact. Splashes produced when loading the backpack
represent a source of contamination by transfer from the backpack to the operator back or hands.
The bulk exposure pathway for handheld application activities includes three kinds of events, namely
leakages from the equipment, splashes from the backpack and drifting from the treated crop. Even
when the bulk pathway may have an important contribution in case an incidental event occurs, the
mentioned unintended events can be avoided by following the best agricultural practices (FAO,
2013) (FAO, (2001a); (2001b)). It is assumed that operators take into account the Best Agricultural
Practices, and follow the PPP label, therefore there is not need to estimate exposure due to misuse
(BROWSE, 2011).
Regarding bulk exposure from the treated crop, the model assumes that the optimal application rate
is assessed and low drift equipment is used. In case that drifting occurs, the fate of the contaminant
should be the area below the crop. Since the operator applies the product from a distance large
enough in which he has freedom of mobility, this event can be neglected.
It is known that even when the best agricultural practices are followed, some types of contacts
cannot be avoided. Crops are usually designed to maximize productivity by increasing the yield per
unit area. In that case, the operator may not be able to freely move between two adjacent crop
canopies leading to frequent direct contact with the crop. This pathway of exposure represent a
common event when applying PPP by using HHA techniques, therefore contacts with the treated
crop has been modelled as part of the “Direct Contact” pathway
Likewise, splashes are likely to occur during mixing and loading periods. Although the mixing and
loading activity has been modelled in a different scenario, the operator can be exposed to the
96

splashes produced during this activity by direct contact with the equipment, and therefore this
source of contamination has been included within the HHA model.
Tables 1 and 2 offer an overview of the pathways included in each scenario for both models, Hands
exposure and Whole Body (excluding hands) exposure Similar equations apply for the different sub-
scenarios based on three key parameters associated with surface contacts as described by Gorman
et al (2012) (frequency of contacts and surface contamination levels), Brouwer et al. (2001) and
Cohen Hubal et al (2005) (transfer efficiencies after continuous contacts). The model algorithms
include the transfer efficiency from the donor surface to the hands and body (Appendix H), as well as
the affected surface area of the hands (Appendix I and Table 5) or body (Table 5) involved in
contacts. The surface-to-hand transfer efficiency (Cf) is corrected to account for multiple contacts,
expressed as Cfmax (maximum number of contact with the spray gun), Cfbackpack (transfer efficiency
after multiple contacts with the backpack) or Cfcrop (transfer efficiency after multiple contacts with
the treated crop) (Appendix J).
Model inputs are different for each sub-scenario (Tables 2).
HAND MODEL:
The model consists of two pathways of exposure:
(i) Deposition of airborne droplets
(ii) 1. Contact with the crop
2. Contact with the equipment
The input parameters and ranges of the models are presented in Table3.
(i) Deposition of airborne droplets (Ddhapp)
The air concentration (Cair) (derived from the ART model) together with the droplet setting velocity
(vdep) and the application time (t) will determine the degree of exposure via deposition
(𝐸𝑞𝑢𝑎𝑡𝑖𝑜𝑛 1). The Stoke law’s defines the droplet setting velocity as a factor directly proportional to
the diameter of the droplet (m) multiplied by the gravitational acceleration and by the differences in
97

gv ag ··4
·92 2
ηδδφ −
=
density between the droplet and the air (kg∙m-3). This velocity is inversely proportional to the
dynamic viscosity of the air (Kg m-1∙s-1) (see equation 7). Droplets <100 µm are regarded as prone to
drift to non-target surfaces (Arvidsson et al., (2011); Miller & Ellis, (2000); Salyani & Cromwell,
(1992)). On the other hand, droplets <50 µm take a long time to deposit (Sundaram & Sundaram
1991). Moreover, they can evaporate in a time shorter than 1.8 seconds under certain climatic
conditions (Hofman & Solseng, 2001) and therefore they were not considered relevant for the
assessment of potential dermal exposure. Inputs parameter used to estimate the droplet setting
velocity are presented in Table 4.
The proportion of droplets sizes relies among other factors on the nozzle type, application pressure
and technique used (Nuyttens et al., 2007). Since the user is unlikely to be acquainted with this
information, a uniform distribution of droplets sizes was considered. As mentioned before, the PPP
spraying solutions density is assumed to be 1000 Kg/m3 (comparable to water). When considering
standard conditions, the droplet setting velocity ranges from 0.078 to 0.303 m•s-1 (see Table 4). The
droplet setting velocity assessed by using the mentioned equation coincides with the sedimentation
velocity estimated by Nuyttens et al. 2009 with a similar approach.
ii.1) Contact with the treated crop ( 𝑫𝒄𝒉𝒄𝒓𝒐𝒑):
ii.1.1 The surface contamination level of the crop, D
It is known that the deposition efficiency of PPP application (E) tends to be less than 100%. Spray
deposition efficiency is dependent upon multiple factors like leaf morphology, droplet size (Smith
(2000); Abdelbagi & Adams, (1987); Uk, (1977), crop height, (Abdelbagi & Adams, 1987), the
equipment used (Juste et al. 1990; Sánchez-Hermosilla et al., 2011), volume applied (Uk, (1977);
Sánchez-Hermosilla et al.,( 2011)) and the use of commercial adjuvants (van Zyl et al.,2010) etc.
Additionally the PPP is not homogeneously distributed over the crop (Sánchez-Hermosilla et al.,
2011). Moreover, the amount of spray reaching the inside zones is remarkably lower than that on
the outside zones (Juste et al., 1990). It was decided to take a broad range of spray deposition
98

efficiency in which the worst case scenario (spray deposition efficiency of 100%) was included (L.
R. Ahuja, (2000); Zabkiewicz, (2007)).
The total leaf area determines the volume in which the product applied will distribute. The Leaf
Area Index (LAI) is defined as the leaf surface area per unit of soil surface area, reflecting a close
relationship between the deposition and distribution of the applications (Rincón, Páez, &
Sánchez-Hermosilla, 2009). To determine this index, a model that estimates this index from the
crop height was used (equation 8). The correlation between the canopy height (H) and the LAI
provides a correlation coefficient of 0.91 when used to estimate the LAI of crops with a regular
distribution of nodes and leaf development.
LAI=0.99∙(H)1.49 (Rincón et al., 2009) (Equation 8)
The average PPP per leaf area can be assessed by relating the amount of active substance of PPP
that reaches the target surface with the LAI by integrating the model by Rincón et al (2009) with
the formula developed by Gil et al. (2007) to estimate the spray deposition efficiency ( equation
5.1). Ccoi is the concentration of active substance of PPP in the air (µg/m3). Ar is the Application
rate (L/m2).
𝐷 =𝐸 ∗ 𝐶𝑐𝑜𝑖 ∗ 𝐴𝑟
0.99 ∗ 𝐻1.49 ∗ 103 (𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 5.1)
Once the crop surface contamination is known, it is also needed to consider the frequency of
contacts, the transfer efficiency from the treated crop to the operator hands, as well as the
affected surface area of the operator hands in order to estimate hands dermal exposure (see
equation 5).
ii.1.2 Surface contacts with the treated crop, (𝑪𝒇𝒄𝒓𝒐𝒑)
This factor has been linked to the row space (Fr), where row space is defined as the space between
the outer leaves of two opposite crop canopies (see Table 3). According to Brouwer (1999) and
99

Cohen Hubal, (2005, 2008), after the 6th contact with the donor surface the dermal loading does not
increase with further contacts, therefore the upper limit of contacts per application episode is set at
the 6th contact event (𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 5.2).
* Considering that the hands of the operator are unlikely to be in contact with crops shorter than
0.7m, dermal hand exposure by direct contact with the crop applies only to scenarios 2 and 4.
ii.2 Contact with the equipment
ii.2.1Surface contact with the spray gun 𝑫𝒄𝒉𝒈𝒖𝒏
As it was stated before, the equation to estimate dermal exposure by surface contact with the gun
relies on the frequency of contacts, the transfer after continuous contacts from the gun to the
operator hands, and the gun surface contamination (See equation 2)
ii.2.1.1 Frequency of contact with the spray gun or lance (and with the hose
that connects the spray gun with the tank in scenarios 1 and 2) (𝑪𝒇𝒎𝒂𝒙):
The operator holds the spray lance or gun during the whole spray process. The model considers a
new contact event each time that the operator changes the position in which he/she holds the spray
lance or gun, namely after a mixing and loading period, and when changing the spraying row since
the operator tends to pull the hose toward him/herself. Considering that a typical crop area contains
at least 6 rows (expert judgement), the upper limit for number of contacts per application episode
was taken in order to simplify the model (see equation 2.2)
ii.2.1.2 Spray gun surface contamination level (𝑺𝒄𝒈𝒖𝒏 ):
The HHA model considers that the main source of contamination is the deposition of airborne
droplets from the air (See equation 2.1). Since the operator is assumed to follow the good
agricultural practices, additional sources of contamination (leakages) as consequence of odd
behavior are neglected. The deposition rate relies on the air concentration (𝐶𝑎𝑖𝑟 ) multiplied by the
application time (t) and by the droplet setting velocity (𝑣𝑑𝑒𝑝).
100

ii.2.2 Surface contact with the backpack (𝐃𝐜𝐡𝐛𝐚𝐜𝐤𝐩𝐚𝐜𝐤)
Hand exposure by direct contact with the backpack considers the frequency of contacts as well as
the variation in the transfer efficiency from the backpack to the operator hands (See equation 3)
ii.2.2.1 Frequency of contact with the backpack (𝑪𝒇𝒃𝒂𝒄𝒌𝒑𝒂𝒄𝒌 ):
Represented by events of putting on/taking off the backpack before and after a mixing/loading
event (𝐹𝑚&𝑙). The mixing & loading periods are either an user input, or estimated from the volume
applied and the tank volume in case this value is unknown by the user. The volume applied
parameter is estimated from user inputs and are based on the total area sprayed (Ha), dose (kg/Ha)
and final mixing & loading concentration (g/l) (See equation 3.2). The surface-to-hand transfer
efficiency (Cf) is corrected to account for multiple contacts, expressed as Cfbackpack. An upper limit of
6th contact events for application episode was taken.
ii.2.2.2 Backpack surface contamination level (𝑺𝒄𝒃𝒂𝒄𝒌𝒑𝒂𝒄𝒌_𝑻𝒐𝒕):
Represented by deposition of airborne droplets onto the backpack, as well as splashes produced
when loading the backpack during a mixing and loading period. The contribution of the deposition
pathway to the total tank surface contamination relies on the air concentration (𝐶𝑎𝑖𝑟 ) multiplied by
the application time (t) and by the droplet setting velocity (𝑣𝑑𝑒𝑝) (See equation 3.1).
Due to the lack of information on spraying tank surface contamination, an estimation of this was
derived from experimental studies on surface contamination levels of induction hoppers (Glass et al,
2009; Gilbert et al, 2000; Mathers et al, 1999). The induction hopper is a receptacle similar in size to
the backpack and the method of filling is similar for both containers. Even when the opening size of
the induction bowl can be up to twice as much bigger as the opening of the spraying backpack is,
field observations often showed that operators tend to be careful when loading the backpack,
therefore both situations are comparable. The tank contamination due to splashes was estimated
from the container size (L) and the concentration of active substances in the spray volume (µg/L).
Container size varies from 0 to 7 liters, each with a probability. The probabilities are based on the
probability frequencies in the experimental data (see Table 7). The derived values are therefore
indicative and only provide information about the relative performance of the different container
sizes when used with a particular filling technique (Appendix G).
101

Data was transformed from contamination levels per operation/container to contamination levels
per square centimeter (L/cm2) for a given container size. For this purpose, surface contamination
levels were estimated using surface areas of containers. First, values were derived for the container
exterior and container upper (lid, cap) of different container sizes. The derived values are therefore
indicative and only provide information about the relative performance of the different container
sizes when used with a particular filling technique.
* PDE by direct contact with the backpack applies only to scenarios 1 and 2
In addition, the transfer efficiency from surfaces to body parts (Cf) (Appendix H), body surfaces
areas (BP) and the affected surface area of body parts (lcn/BP) (Appendix I) are included in the
algorithms. The surface-to-hand transfer efficiency (Cf) is corrected to account for multiple
contacts with an upper limit of six contacts.
Whole body (excluding hands) model
The whole body (excluding hands) model consists of two pathways of exposure:
(i) Deposition of airborne droplets
(ii) 1. Contact with the crop
2. Contact with the equipment
Similarly as for the dermal hand model, the whole body (excl. hands) model considers that transfer
from the bulk to the operator is not relevant (and therefore not included in the model) since
operators are assumed to follow the best management practice in order to avoid the occurrence of
incidental events such a splashes, leakages and drifting (Appendix N).
To model the whole body (excl. hands) exposure, similar equations are used, nevertheless the
pathways included in whole body exposure (see Table 2) as well as the model inputs vary from one
to another model. Similarly, the body surface area is extended in this model. Table 4 summarizes the
proportion of the whole body affected according to this approach. This model takes into account a
102

maximum affected body surface area of 0.94 considering that the hands and head are excluded from
this model.
The model assumes that the whole body (excl. hands) is exposed to deposition of droplets (equation
4).Whole body exposure by direct contact with the treated crop is linked to the crop height.
(𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 5.4). During a typical application performance by using a spraying knapsack or backpack,
just the back and the hands of the operator are prompt to be exposed by contact with the
equipment, therefore the equation to model this pathway considers that just the back body surface
is relevant (𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 6)*
* PDE by direct contact with the backpack applies only to scenario 1and 2
(a) Model testing
Please refer to section 3.2.7 for detailed information about the database used to test the model as
well as the statistical analysis performed. Result of the model testing are presented in figures 1to 10.
Figures 1 and 2 show the result from the sensitivity analysis performed to probe the suitability of the
four sub-scenarios proposed for the hand and whole body dermal exposure models. Results of the
hand and whole body models testing are presented in figures 3 to 10.
The graphical representations for all the sub-scenarios depict the measured potential dermal
exposure (y-axis) against the geometric mean of the model outputs (x-axis). The individual measured
potential dermal exposure (dots) and estimated model outputs (grey lines) plotted with the
exposure level ( y-axis).
(b) Algorithms
Scenario 1: Backpack – Downward spraying
I. Hand exposure model:
Dph = Ddhapp + Dchgun + Dchbackpack
Dph Potential dermal hand exposure a.s (µg)
Ddhapp Potential dermal hand exposure to droplets via deposition (µg)
103

Dch gun Potential dermal hand exposure via surface contacts with the gun (µg)
Dch backpack Potential dermal hand exposure via surface contacts with the bacpack (µg)
Deposition
𝐷𝑑ℎ𝑎𝑝𝑝 =𝐶𝑎𝑖𝑟 ∗ 𝑡 ∗ 𝑣𝑑𝑒𝑝 ∗ 𝐵𝑃ℎ𝑎𝑛𝑑𝑠 ∗ 𝑙𝑐𝑛
𝐵𝑃ℎ𝑎𝑛𝑑𝑠_𝑡𝑜𝑝 (𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 𝐼)
Cair Concentration of a.i. in air (µg/m3)
t Total application time (s)
vdep Droplet settling velocity average deposition speed of droplets in the air (m/s)
BPhands Total surface area of the hands (m2)
lcn/ BPhands_top Affected surface area of hands (m2 of BP)
Surface contacts with the gun
𝐷𝑐ℎ𝑔𝑢𝑛 =𝑆𝑐𝑔𝑢𝑛 ∗ 𝐶𝑓𝑚𝑎𝑥 ∗ 𝐵𝑃ℎ𝑎𝑛𝑑𝑠 ∗ 𝑙𝑐𝑛
𝐵𝑃ℎ𝑎𝑛𝑑𝑠_𝑝𝑎𝑙𝑚𝑠 (𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 2)
𝑆𝑐𝑔𝑢𝑛 = (𝑆𝑐𝑇𝑎𝑛𝑘 ∗ 𝐶𝑐𝑜𝑖) + (𝐶𝑎𝑖𝑟 ∗ 𝑡 ∗ 𝑣𝑑𝑒𝑝) (𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 2.1)
𝐶𝑓𝑚𝑎𝑥 = �𝐶𝑓𝑔𝑟𝑎𝑠𝑝 ∗ 0.5(𝐾−1)𝐹=6
𝐾=1
(𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 2.2)
Scgun = Surface contamination of the gun
Cfmax Corrected transfer efficiency for maximum amount of contacts (maximum:
0.89 with Cf = 0.45; Fgrasp= 6) (Appendix H)
104

Cfgrasp Transfer efficiency for grasping of smooth surfaces (triangular distribution
with lower value 0.23, mode 0.45 and upper 0.68)
lcn/ BPhands_palms Affected surface area of hands (m2 of BP)
Surface contact with the backpack
𝐷𝑐ℎ𝑏𝑎𝑐𝑘𝑝𝑎𝑐𝑘 =𝑆𝑐𝑏𝑎𝑐𝑘𝑝𝑎𝑐𝑘_𝑇𝑜𝑡 ∗ 𝐶𝑓𝑏𝑎𝑐𝑘𝑝𝑎𝑐𝑘 ∗ 𝐵𝑃ℎ𝑎𝑛𝑑𝑠 ∗ 𝑙𝑐𝑛
𝐵𝑃ℎ𝑎𝑛𝑑𝑠_𝑝𝑎𝑙𝑚𝑠 (𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 3)
𝑆𝑐𝑏𝑎𝑐𝑘𝑝𝑎𝑐𝑘_𝑇𝑜𝑡 = (𝑆𝑐𝑏𝑎𝑐𝑘𝑝𝑎𝑐𝑘 ∗ 𝐶𝑐𝑜𝑖) + (𝐶𝑎𝑖𝑟 ∗ 𝑡 ∗ 𝑣𝑑𝑒𝑝) (𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 3.1)
𝐶𝑓𝑏𝑎𝑐𝑘𝑝𝑎𝑐𝑘 = � 𝐶𝑓𝑔𝑟𝑎𝑠𝑝 ∗ 0.5(𝐹𝑚&𝑙−1)
𝐹𝑚&𝑙
𝐾=1
(𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 3.2)
Scbackpack Surface contamination level of the backpack (l/cm2)
Cfbackpack Corrected transfer efficiency for multiple contacts (maximum: 0.89 with Cf =
0.45; Fgrasp = 6) (Appendix H)
Fm&l Frequency of M&L periods
Ccoi Concentration of a.s in spraying volume (µg/L)
II. Whole body exposure model:
Dpw = Ddwapp + Dcwcrop + Dcwequipment
Dpw Potential dermal whole body exposure a.s (µg)
Ddwapp Potential dermal whole body exposure to droplets via deposition (µg)
Dcwcrop Potential dermal whole body exposure via surface contacts with the crop
(µg)
Dcwbackpack Potential dermal whole body exposure via surface contacts with the
backpack (µg)
105

Deposition
𝐷𝑑𝑤𝑎𝑝𝑝 = 𝐶𝑎𝑖𝑟 ∗ 𝑡 ∗ 𝑣𝑑𝑒𝑝 ∗ 𝐵𝑃𝑤ℎ𝑜𝑙𝑒 𝑏𝑜𝑑𝑦 (𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 4)
Cair Concentration of a.i. in air (µg/m3)
t Total application time (s)
vdep Droplet settling velocity average deposition speed of droplets in the air (m/s)
BPwhole body Total surface area of the body (m2)
Lcn/BPbody-ch Proportion of body part affected according to crop height (m2 of BP)
Surface contacts with the crop
𝐷𝑐𝑤𝑐𝑟𝑜𝑝 =𝐷 ∗ 𝐶𝑓𝑐𝑟𝑜𝑝 ∗ 𝐵𝑃𝑤ℎ𝑜𝑙𝑒 𝑏𝑜𝑑𝑦 ∗ 𝑙𝑐𝑛
𝐵𝑃𝑏𝑜𝑑𝑦−𝑐ℎ (𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 5)
𝐷 = 𝐸∗𝐶𝑐𝑜𝑖∗𝐴𝑟0.99∗𝐻1.49∗103
(𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 5.1)
𝐶𝑓𝑐𝑟𝑜𝑝 = �𝐶𝑓𝑠𝑚𝑢𝑑𝑔𝑒 ∗ 0.5(𝐹𝑟−1)𝐹𝑟
𝐾=1
(𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 5.2)
D Average of PPP deposited per unit of leaf area (µg/m2)
E Spray efficiency (100 %)
Ccoi Concentration of a.s in spraying volume (µg/L)
Ar Application rate (L/m2)
H Crop Height (m)
Fr Frequency of contact according to row space (Table 5)
Cfcrop Corrected transfer efficiency for maximum amount of contacts (maximum:
0.22 with Cf = 0.112; Fgsmudge= 6) (Appendix H)
Cfsmudge Transfer efficiency for the smudging of smooth surfaces (triangular
distribution with lower value 0.019, mode 0.112 and upper 0.45 (Appendix
H)
106

Surface contact with the backpack
𝐷𝑐𝑤𝑏𝑎𝑐𝑘𝑝𝑎𝑐𝑘 =𝑆𝑐𝑏𝑎𝑐𝑘𝑝𝑎𝑐𝑘 ∗ 𝐶𝑐𝑜𝑖 ∗ 𝐶𝑓𝑏𝑎𝑐𝑘𝑝𝑎𝑐𝑘 ∗ 𝐵𝑃𝑏𝑜𝑑𝑦 ∗ 𝑙𝑐𝑛
𝐵𝑃𝑏𝑎𝑐𝑘 (𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 6)
𝐶𝑓𝑏𝑎𝑐𝑘𝑝𝑎𝑐𝑘 = � 𝐶𝑓𝑔𝑟𝑎𝑠𝑝 ∗ 0.5(𝐹𝑚&𝑙−1)
𝐹𝑚&𝑙
𝐾=1
(𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 3.2)
Scbackpack Surface contamination level of the backpack (l/cm2)
Cfbackpack Corrected transfer efficiency for multiple contacts (maximum: 0.89 with Cf =
0.45; Fgrasp = 6)
Cfgrasp Transfer efficiency for grasping of smooth surfaces (triangular distribution
with lower value 0.23, mode 0.45 and upper 0.68)
Lcn/BPback Affected surface area of the back (m2 of BP)
Scenario 2: Backpack – Up- and Downward spraying
I. Hand exposure model:
Dph = Ddhapp + Dchcrop + Dchgun + Dchbackpack
Dph Potential whole body dermal exposure a.s (µg)
Ddhapp Potential dermal hand exposure to droplets via deposition (µg)
Dchcrop Potential dermal hand exposure via surface contacts with the crop (µg)
Dchgun Potential dermal hand exposure via surface contacts with the gun (µg)
Dchbackpack Potential dermal hand exposure via surface contacts with the backpack (µg)
107

Deposition
𝐷𝑑ℎ𝑎𝑝𝑝 =𝐶𝑎𝑖𝑟 ∗ 𝑡 ∗ 𝑣𝑑𝑒𝑝 ∗ 𝐵𝑃ℎ𝑎𝑛𝑑𝑠 ∗ 𝑙𝑐𝑛
𝐵𝑃ℎ𝑎𝑛𝑑𝑠_𝑡𝑜𝑝 (𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 𝐼)
Cair Concentration of a.i. in air (µg/m3)
t Total application time (s)
vdep Droplet settling velocity average deposition speed of droplets in the air (m/s)
BPhands Total surface area of the hands (m2)
lcn/ BPhands_top Affected surface area of hands (m2 of BP)
Surface contact with the crop
𝐷𝑐ℎ𝑐𝑟𝑜𝑝 = 𝐷 ∗ 𝐶𝑓𝑐𝑟𝑜𝑝 ∗ 𝐵𝑃ℎ𝑎𝑛𝑑𝑠
𝐷 = 𝐸∗𝐶𝑐𝑜𝑖∗𝐴𝑟0.99∗𝐻1.49∗103
(𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 5.1)
𝐶𝑓𝑐𝑟𝑜𝑝 = �𝐶𝑓𝑠𝑚𝑢𝑑𝑔𝑒 ∗ 0.5(𝐹𝑟−1)𝐹𝑟
𝐾=1
(𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 5.2)
D Average of PPP deposited per unit of leaf area (µg/m2)
E Spray efficiency factor
Ccoi Concentration of a.s in spraying volume (µg/L)
Ar Application rate (L/m2)
H Crop Height (m)
Cfcrop Corrected transfer efficiency for maximum amount of contacts (maximum: 0.22 with
Cf = 0.112; Fgsmudge= 6) (Appendix H)
Cfsmudge Transfer efficiency for the smudging of smooth surfaces (triangular distribution with
lower value 0.019, mode 0.112 and upper 0.45 (Appendix H)
Fr Frequency of contact according to row space (Table 5)
108

Surface contacts with the gun
𝐷𝑐ℎ𝑔𝑢𝑛 =𝑆𝑐𝑔𝑢𝑛 ∗ 𝐶𝑓𝑚𝑎𝑥 ∗ 𝐵𝑃ℎ𝑎𝑛𝑑𝑠 ∗ 𝑙𝑐𝑛
𝐵𝑃ℎ𝑎𝑛𝑑𝑠_𝑝𝑎𝑙𝑚𝑠 (𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 2)
𝑆𝑐𝑔𝑢𝑛 = 𝐶𝑎𝑖𝑟 ∗ 𝑡 ∗ 𝑣𝑑𝑒𝑝 (𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 2.1)
𝐶𝑓𝑚𝑎𝑥 = �𝐶𝑓𝑔𝑟𝑎𝑠𝑝 ∗ 0.5(𝐹−1)𝐹=6
𝐾=1
(𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 2.2)
Scgun = Surface contamination of the gun
Cfmax Corrected transfer efficiency for maximum amount of contacts (maximum: 0.89 with
Cf = 0.45; Fgrasp= 6) (Appendix H)
Cfgrasp Transfer efficiency for grasping of smooth surfaces (triangular distribution with lower
value 0.23, mode 0.45 and upper 0.68)
lcn/ BPhands_palms Affected surface area of hands (m2 of BP)
Surface contact with the backpack
𝐷𝑐ℎ𝑏𝑎𝑐𝑘𝑝𝑎𝑐𝑘 =𝑆𝑐𝑏𝑎𝑐𝑘𝑝𝑎𝑐𝑘_𝑇𝑜𝑡 ∗ 𝐶𝑓𝑏𝑎𝑐𝑘𝑝𝑎𝑐𝑘 ∗ 𝐵𝑃ℎ𝑎𝑛𝑑𝑠 ∗ 𝑙𝑐𝑛
𝐵𝑃ℎ𝑎𝑛𝑑𝑠_𝑝𝑎𝑙𝑚𝑠 (𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 3)
𝑆𝑐𝑏𝑎𝑐𝑘𝑝𝑎𝑐𝑘_𝑇𝑜𝑡 = (𝑆𝑐𝑏𝑎𝑐𝑘𝑝𝑎𝑐𝑘 ∗ 𝐶𝑐𝑜𝑖) + (𝐶𝑎𝑖𝑟 ∗ 𝑡 ∗ 𝑣𝑑𝑒𝑝) (𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 3.1)
𝐶𝑓𝑏𝑎𝑐𝑘𝑝𝑎𝑐𝑘 = � 𝐶𝑓𝑔𝑟𝑎𝑠𝑝 ∗ 0.5(𝐹𝑚&𝑙−1)
𝐹𝑚&𝑙
𝐾=1
(𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 3.2)
Scbackpack Surface contamination level of the backpack (l/cm2)
Cfbackpack Corrected transfer efficiency for multiple contacts (maximum: 0.89 with Cf =
0.45; Fgrasp = 6) (Appendix H)
Cfgrasp Transfer efficiency for grasping of smooth surfaces (triangular distribution
with lower value 0.23, mode 0.45 and upper 0.68)
109

Fm&l Frequency of M&L periods
Ccoi Concentration of a.s in spraying volume (µg/L)
II. Whole body exposure model:
Dpw = Ddwapp + Dcwcrop + Dcwbackpack
Dpw Potential whole body dermal exposure a.s (µg)
Ddwapp Potential dermal whole body exposure to droplets via deposition (µg)
Dcwcrop Potential dermal whole body exposure via surface contacts with the crop (µg)
Dcwbackpack Potential dermal whole body exposure via surface contacts with the backpack (µg)
Deposition
𝐷𝑑𝑤𝑎𝑝𝑝 = 𝐶𝑎𝑖𝑟 ∗ 𝑡 ∗ 𝑣𝑑𝑒𝑝 ∗ 𝐵𝑃𝑤ℎ𝑜𝑙𝑒 𝑏𝑜𝑑𝑦 (𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 4)
Cair Concentration of a.i. in air (µg/m3)
t Total application time (s)
vdep Droplet settling velocity average deposition speed of droplets in the air (m/s)
BPwhole body Total surface area of the body (m2)
Surface contacts with the crop
𝐷𝑐𝑤𝑐𝑟𝑜𝑝 =𝐷 ∗ 𝐶𝑓𝑐𝑟𝑜𝑝 ∗ 𝐵𝑃𝑤ℎ𝑜𝑙𝑒 𝑏𝑜𝑑𝑦 ∗ 𝑙𝑐𝑛
𝐵𝑃𝑏𝑜𝑑𝑦−𝑐ℎ (𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 5)
𝐷 = 𝐸∗𝐶𝑐𝑜𝑖∗𝐴𝑟0.99∗𝐻1.49∗103
(𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 5.1)
𝐶𝑓𝑐𝑟𝑜𝑝 = �𝐶𝑓𝑠𝑚𝑢𝑑𝑔𝑒 ∗ 0.5(𝐹𝑟−1)𝐹𝑟
𝐾=1
(𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 5.2)
110

D Average of PPP deposited per unit of leaf area (µg/m2)
E Spray efficiency factor
Ccoi Concentration of a.s in spraying volume (µg/L)
Ar Application rate (L/m2)
H Crop Height (m)
Cfcrop Corrected transfer efficiency for maximum amount of contacts (maximum: 0.22 with
Cf = 0.112; Fgsmudge= 6) (Appendix H)
Cfsmudge Transfer efficiency for the smudging of smooth surfaces (triangular distribution with
lower value 0.019, mode 0.112 and upper 0.45 (Appendix H)
Fr Frequency of contact according to row space (Table 6)
Lcn/BPbody-ch Affected surface area of the back (m2 of BP)
Surface contacts with the backpack
𝐷𝑐𝑤𝑏𝑎𝑐𝑘𝑝𝑎𝑐𝑘 = 𝑆𝑐𝑏𝑎𝑐𝑘𝑝𝑎𝑐𝑘∗𝐶𝑐𝑜𝑖∗𝐶𝑓𝑏𝑎𝑐𝑘𝑝𝑎𝑐𝑘∗𝐵𝑃𝑏𝑜𝑑𝑦∗𝑙𝑐𝑛𝐵𝑃𝑏𝑎𝑐𝑘
(𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 6)
𝐶𝑓𝑏𝑎𝑐𝑘𝑝𝑎𝑐𝑘 = � 𝐶𝑓𝑔𝑟𝑎𝑠𝑝 ∗ 0.5(𝐹𝑚&𝑙−1)
𝐹𝑚&𝑙
𝐾=1
(𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 3.2)
Scbackpack Surface contamination level of the backpack (l/cm2)
Cfbackpack Corrected transfer efficiency for multiple contacts (maximum: 0.89 with Cf =
0.45; Fgrasp = 6) (Appendix H)
Cfgrasp Transfer efficiency for grasping of smooth surfaces (triangular distribution
with lower value 0.23, mode 0.45 and upper 0.68)
Fm&l Frequency of M&L periods
Ccoi Concentration of a.s in spraying volume (µg/L)
Lcn/BPback Affected surface area of the back (m2 of BP)
111

Scenario 3: Gun and Hose – Downward spraying
I. Hand exposure model:
Dph = Ddhapp + Dchgun
Dph Potential hands dermal exposure a.s (µg)
Ddhapp Potential dermal hand exposure to droplets via deposition (µg)
Dchgun Potential dermal hand exposure via surface contacts with the gun (µg)
Deposition
𝐷𝑑ℎ𝑎𝑝𝑝 =𝐶𝑎𝑖𝑟 ∗ 𝑡 ∗ 𝑣𝑑𝑒𝑝 ∗ 𝐵𝑃ℎ𝑎𝑛𝑑𝑠 ∗ 𝑙𝑐𝑛
𝐵𝑃ℎ𝑎𝑛𝑑𝑠_𝑡𝑜𝑝 (𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 𝐼)
Cair Concentration of a.i. in air (µg/m3)
t Total application time (s)
vdep Droplet settling velocity average deposition speed of droplets in the air (m/s)
BPhands Total surface area of the hands (m2)
lcn/ BPhands_top Affected surface area of hands (m2 of BP)
Surface contacts with the gun
𝐷𝑐ℎ𝑔𝑢𝑛 =𝑆𝑐𝑔𝑢𝑛 ∗ 𝐶𝑓𝑚𝑎𝑥 ∗ 𝐵𝑃ℎ𝑎𝑛𝑑𝑠 ∗ 𝑙𝑐𝑛
𝐵𝑃ℎ𝑎𝑛𝑑𝑠_𝑝𝑎𝑙𝑚𝑠 (𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 2)
𝑆𝑐𝑔𝑢𝑛 = 𝐶𝑎𝑖𝑟 ∗ 𝑡 ∗ 𝑣𝑑𝑒𝑝 (𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 2.1)
𝐶𝑓𝑚𝑎𝑥 = �𝐶𝑓𝑔𝑟𝑎𝑠𝑝 ∗ 0.5(𝐹−1)𝐹=6
𝐾=1
(𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 2.2)
112

Scgun = Surface contamination of the gun
Cfmax Corrected transfer efficiency for maximum amount of contacts (maximum: 0.89 with
Cf = 0.45; Fgrasp= 6) (Appendix H)
Cfgrasp Transfer efficiency for grasping of smooth surfaces (triangular distribution with lower
value 0.23, mode 0.45 and upper 0.68)
lcn/ BPhands_palms Affected surface area of hands (m2 of BP)
II. Whole body exposure model:
Dpw = Ddapp + Dccrop
Dpw Potential whole body dermal exposure a.s (µg)
Ddwapp Potential dermal whole body exposure to droplets via deposition (µg)
Dcwcrop Potential dermal whole body exposure via surface contacts with the crop
(µg)
Deposition
𝐷𝑑𝑤𝑎𝑝𝑝 = 𝐶𝑎𝑖𝑟 ∗ 𝑡 ∗ 𝑣𝑑𝑒𝑝 ∗ 𝐵𝑃𝑤ℎ𝑜𝑙𝑒 𝑏𝑜𝑑𝑦 (𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 4)
Cair Concentration of a.i. in air (µg/m3)
t Total application time (s)
vdep Droplet settling velocity average deposition speed of droplets in the air (m/s)
BPwhole body Total surface area of the body (m2)
Surface contacts with the crop
𝐷𝑐𝑤𝑐𝑟𝑜𝑝 =𝐷 ∗ 𝐶𝑓𝑐𝑟𝑜𝑝 ∗ 𝐵𝑃𝑤ℎ𝑜𝑙𝑒 𝑏𝑜𝑑𝑦 ∗ 𝑙𝑐𝑛
𝐵𝑃𝑏𝑜𝑑𝑦−𝑐ℎ (𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 5)
113

𝐷 = 𝐸∗𝐶𝑐𝑜𝑖∗𝐴𝑟0.99∗𝐻1.49∗103
(𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 5.1)
𝐶𝑓𝑐𝑟𝑜𝑝 = �𝐶𝑓𝑠𝑚𝑢𝑑𝑔𝑒 ∗ 0.5(𝐹𝑟−1)𝐹𝑟
𝐾=1
(𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 5.2)
D Average of PPP deposited per unit of leaf area (µg/m2)
E Spray efficiency factor
Ccoi Concentration of a.s in spraying volume (µg/L)
Ar Application rate (L/m2)
H Crop Height (m)
Fr Frequency of contact according to row space (Table 6)
Cfcrop Corrected transfer efficiency for maximum amount of contacts (maximum: 0.22 with
Cf = 0.112; Fgsmudge= 6) (Appendix H)
Cfsmudge Transfer efficiency for the smudging of smooth surfaces (triangular distribution with
lower value 0.019, mode 0.112 and upper 0.45 (Appendix H)
BPwhole body Total surface area of the body (m2)
Lcn/BPbody-ch Proportion of body part affected according to crop height (m2 of BP)
Scenario 4: Gun and Hose – Up- and Downward spraying
I. Hand exposure model
Dph = Ddhapp + Dchgun + Dchcrop
Dph Potential hands dermal exposure a.s (µg)
Ddhapp Potential dermal hand exposure to droplets via deposition (µg)
Dchcrop Potential dermal hand exposure via surface contacts with the crop (µg)
Dchgun Potential dermal hand exposure via surface contacts with the gun (µg)
114

Deposition
𝐷𝑑ℎ𝑎𝑝𝑝 =𝐶𝑎𝑖𝑟 ∗ 𝑡 ∗ 𝑣𝑑𝑒𝑝 ∗ 𝐵𝑃ℎ𝑎𝑛𝑑𝑠 ∗ 𝑙𝑐𝑛
𝐵𝑃ℎ𝑎𝑛𝑑𝑠_𝑡𝑜𝑝 (𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 𝐼)
Cair Concentration of a.i. in air (µg/m3)
t Total application time (s)
vdep Droplet settling velocity average deposition speed of droplets in the air (m/s)
BPhands Total surface area of the hands (m2)
lcn/ BPhands_top Affected surface area of hands (m2 of BP)
Surface contacts with the crop
𝐷𝑐ℎ𝑐𝑟𝑜𝑝 = 𝐷 ∗ 𝐶𝑓𝑐𝑟𝑜𝑝 ∗ 𝐵𝑃ℎ𝑎𝑛𝑑𝑠
𝐷 = 𝐸∗𝐶𝑐𝑜𝑖∗𝐴𝑟0.99∗𝐻1.49∗103
(𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 5.1)
𝐶𝑓𝑐𝑟𝑜𝑝 = �𝐶𝑓𝑠𝑚𝑢𝑑𝑔𝑒 ∗ 0.5(𝐹𝑟−1)𝐹𝑟
𝐾=1
(𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 5.2)
D Average of PPP deposited per unit of leaf area (µg/m2)
E Spray efficiency factor
Ccoi Concentration of a.s in spraying volume (µg/L)
Ar Application rate (L/m2)
H Crop Height (m)
Cfcrop Corrected transfer efficiency for maximum amount of contacts (maximum: 0.22 with
Cf = 0.112; Fgsmudge= 6) (Appendix H)
Cfsmudge Transfer efficiency for the smudging of smooth surfaces (triangular distribution with
lower value 0.019, mode 0.112 and upper 0.45 (Appendix H)
Fr Frequency of contact according to row space (Table 6)
115

Surface contacts with the gun
𝐷𝑐ℎ𝑔𝑢𝑛 =𝑆𝑐𝑔𝑢𝑛 ∗ 𝐶𝑓𝑚𝑎𝑥 ∗ 𝐵𝑃ℎ𝑎𝑛𝑑𝑠 ∗ 𝑙𝑐𝑛
𝐵𝑃ℎ𝑎𝑛𝑑𝑠_𝑝𝑎𝑙𝑚𝑠 (𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 2)
Scgun = Surface contamination of the gun
Cfmax Corrected transfer efficiency for maximum amount of contacts (maximum: 0.89 with
Cf = 0.45; Fgrasp= 6) (Appendix H)
Cfgrasp Transfer efficiency for grasping of smooth surfaces (triangular distribution with lower
value 0.23, mode 0.45 and upper 0.68)
lcn/ BPhands_palms Affected surface area of hands (m2 of BP)
II. Whole body exposure model:
Dpw =Ddwapp + Dcwapp
Dpw Potential whole body dermal exposure a.s (µg)
Ddwapp Potential dermal whole body exposure to droplets via deposition (µg)
Dcwcrop Potential dermal whole body exposure via surface contacts with the crop (µg)
Deposition
𝐷𝑑𝑤𝑎𝑝𝑝 = 𝐶𝑎𝑖𝑟 ∗ 𝑡 ∗ 𝑣𝑑𝑒𝑝 ∗ 𝐵𝑃𝑤ℎ𝑜𝑙𝑒 𝑏𝑜𝑑𝑦 (𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 4)
Cair Concentration of a.i. in air (µg/m3)
t Total application time (s)
vdep Droplet settling velocity average deposition speed of droplets in the air (m/s)
BPwhole body Total surface area of the body (m2)
116

Surface contacts with the crop
𝐷𝑐𝑤𝑐𝑟𝑜𝑝 =𝐷 ∗ 𝐶𝑓𝑐𝑟𝑜𝑝 ∗ 𝐵𝑃𝑤ℎ𝑜𝑙𝑒 𝑏𝑜𝑑𝑦 ∗ 𝑙𝑐𝑛
𝐵𝑃𝑏𝑜𝑑𝑦−𝑐ℎ (𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 5)
𝐷 = 𝐸∗𝐶𝑐𝑜𝑖∗𝐴𝑟0.99∗𝐻1.49∗103
(𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 5.1)
𝐶𝑓𝑐𝑟𝑜𝑝 = �𝐶𝑓𝑠𝑚𝑢𝑑𝑔𝑒 ∗ 0.5(𝐹𝑟−1)𝐹𝑟
𝐾=1
(𝑒𝑞𝑢𝑎𝑡𝑖𝑜𝑛 5.2)
D Average of PPP deposited per unit of leaf area (µg/m2)
E Spray efficiency factor
Ccoi Concentration of a.s in spraying volume (µg/L)
Ar Application rate (L/m2)
H Crop Height (m)
Fr Frequency of contact according to row space (Table 6)
Cfcrop Corrected transfer efficiency for maximum amount of contacts (maximum: 0.22 with
Cf = 0.112; Fgsmudge= 6) (Appendix H)
Cfsmudge Transfer efficiency for the smudging of smooth surfaces (triangular distribution with
lower value 0.019, mode 0.112 and upper 0.45 (Appendix H)
BPwhole body Total surface area of the body (m2)
Lcn/BPbody-ch Proportion of body part affected according to crop height (m2 of BP)
(c) Model testing
Please refer to the type of plots/graphs and explanation under item 3.2.6 (f)
117

The whole model was run with a dataset of more than 600 data entries in which some inputs were
imputed. There were at least 120 data entries per scenario. Imputation was done by empirical
sampling from existing values in the data and 2,000 iterations were used.
Mean, median, 2.5th percentile and 97.5th percentiles were calculated and plotted against the true
values that we have from data and plot the 95% confidence intervals, medians and means of the
output against the true values (all on log10 scale) for comparison
Additionally the suitability of considering four different scenarios based on the spraying direction
and the equipment used was tested. Figures 1 and 2 prove that the variation in exposure decreases
by considering the above mentioned scenarios.
As shown in figures 3 to 10, the whole model tends to underestimate exposure for hand exposure
as well as for whole body exposure, nevertheless it can be due to the imputed data used. The model
provides a high variability and broad range in exposure
Scenario 1: Backpack Downward Spraying
Testing of the hands exposure model in plotted in Figure 3 and whole body is plotted in Figure 4
Scenario 2: Backpack Up and Downward Spraying
Testing of the hands exposure model in plotted in Figure 5 and whole body is plotted in Figure 6
Scenario 3: Gun and Hose Downward Spraying
Testing of the hands exposure model in plotted in Figure 7 and whole body is plotted in Figure 8
Scenario 4: Gun and Hose Up and Downward Spraying
Testing of the hands exposure model in plotted in Figure 9 and whole body is plotted in Figure 10
(d) Comment to Gun and Hose Up and Downwards spraying
Within the Browse Reserve fund Report Field trials conducted in Greece data on operator exposures for hand held application of a gun and hose up and downward scenario were collected.
118

These data are considered to mimic worst case scenario’s. In these experiments the transfer from crop to operator was measured during spraying processes. This was done by first spraying pesticide A and later spraying pesticide B while measuring pesticide A. Crops were very dense and high with narrow row spacings. Comparisons of our model estimations of crop transfer and the experimental data collected in the reserve fund projecte are displayed in the table Operator Model output (% of total exposure
contribution by the crop transfer route) Reserve fund output (worst case) (% of measured pesticide A transferred from crop during application of pesticide B directly after application of pesticide A)
Total Body 0 – 11 % 10 – 16 % Hands 0 – 22.6 % 9 – 21 % (e) Tables
Table 1: Hand Exposure Models, Scenarios and Pathways included
Model Scenario Pathway
Hands Exposure Backpack Downward
Spraying
Potential dermal hand exposure to droplets via deposition (Ddhapp) Potential dermal hand exposure via surface contacts with the gun (Ddhgun)
Potential dermal hand exposure via surface contacts with the backpack (Ddhbackpack)
Backpack Up and
Downward Spraying
Potential dermal hand exposure to droplets via deposition (Ddhapp) Potential dermal hand exposure via surface contacts with the crop (Ddhcrop)
Potential dermal hand exposure via surface contacts with the gun (Ddhgun)
Potential dermal hand exposure via surface contacts with the backpack (Ddhbackpack)
Gun and Hose
Downward Spraying
Potential dermal hand exposure to droplets via deposition (Ddhapp) Potential dermal hand exposure via surface contacts with the gun (Ddhgun)
Gun and Hose Up and
Downward Spraying
Potential dermal hand exposure to droplets via deposition (Ddhapp) Potential dermal hand exposure via surface contacts with the crop (Ddhcrop)
Potential dermal hand exposure via surface contacts with the gun (Ddhgun)
Table 2: Whole Body Exposure Models, Scenarios and Pathways included
Model Scenario Pathway
Whole Body (excluding
hands) Exposure Backpack Downward
Spraying Potential dermal whole body exposure to droplets via deposition (Ddwapp) Potential dermal whole body exposure via surface contacts with the crop (Dcwcrop ) Potential dermal whole body exposure via surface contacts with the backpack
(Dcwbackpack ) Backpack Up and
Downward Spraying Potential dermal whole body exposure to droplets via deposition (Ddwapp) Potential dermal whole body exposure via surface contacts with the crop (Dcwcrop ) Potential dermal whole body exposure via surface contacts with the backpack
(Dcwbackpack )
119

Gun and Hose
Downward Spraying Potential dermal whole body exposure to droplets via deposition (Ddwapp) Potential dermal whole body exposure via surface contacts with the crop (Dcwcrop )
Gun and Hose Up and
Downward Spraying Potential dermal whole body exposure to droplets via deposition (Ddwapp) Potential dermal whole body exposure via surface contacts with the crop (Dcwcrop )
Table 3: Handheld application model inputs
abbr User input Model Inputs Lower Upper Type Based on
t Total application
time of spraying
activity (s)
Application Time 0 1500 Selected value
Cc.o.i Concentration of
a.s. in spray volume
(g/l)
Concentration of a.s. in
spray volume (g/l)
0.05 50 selected value BROWSE data
Cair n/a Concentration of A.I. in
air (µg/m3) according to
inhalation model
Fixed
Fmlp n/a Number of M&L periods
(estimated with volume
applied and tank size)
1 20 selected value BROWSE data
Fr n/a Frequency of contact
according to row space
1 6 Uniform
distribution
according to row
space
Table 6
H Crop height (m) Crop height (m) Selected value
Ar Application Rate,
(L/ha)
Application Rate, (L/ha) Selected value
E n/a Spray deposition
Efficiency factor
0.6 1 Default is 1 (L. R. Ahuja,
(2000);
Zabkiewicz,
(2007)).
120

abbr User input Model Inputs Lower Upper Type Based on
drow Row space (m) Row space (m) 0.1 >1.5 Selected Value (Frenich et al.,
2002),
(Machera,
2003)
Cfcrop n/a Corrected transfer
efficiency for maximum
amount of contacts
(maximum: 0.22 with Cf
= 0.112; Fgsmudge= 6)
- - Fixed Appendix H
Cfsmudge n/a Transfer efficiency for
the smudging of smooth
surfaces
0.019 0.45 triangular
distribution with
lower value
0.019, mode
0.112 and upper
0.45
Appendix H
BPhands Gender (male,
female)
Surface area of hands
(m2)
- - lognormal
distributions
(Males: log(SA) ~
Normal (-2.2319,
0.109922)
Females: log(SA)
~ Normal(-
2.4313, 0.10362))
Appendix I
BPwholeb
ody
Gender (male,
female)
Surface area of the
whole body (m2)
- - Lognormal
distributions
(Males:
Appendix I
Lcn/BPb
ody-ch
n/a Proportion of body part
affected according to
crop height
- - Table 5
121

abbr User input Model Inputs Lower Upper Type Based on
lcn/
BPhands_t
op
n/a Affected surface area of
top of hands
- - Table 5
* Number of contacts with the treated crop is linked to the row space (See table 6)
Table 4. Droplet setting velocity variables
Symbol Description Units Multiplier Effect Range
V Droplet Setting Velocity m∙s-1 0.078 – 0.303
ø Droplet Diameter m - 5∙10-5 - 1∙10-4
δg Droplet density Kg∙m-3 1,000
δa Air Density Kg∙m-3 1.275
ἠ Dynamic viscosity of the air kg∙m-1∙s-1 1.78 ∙10-5
g Gravitational constant m∙s-2 9.81
Table 5. Body surface area affected. Default values No Input Variable User
input Inputs Multiplier Effect
Range Type of distribution
Based on
1 Total surface area of hands, m2 (BPhands)
No Male 0,107 0.09 – 0.131 Mean 0.107 (5% 0.09, 95% 0.131)
US EPA (1985)
Female 0.089 0.076 – 0.106
Mean 0.076 (5% 0.076, 95% 0.106)
US EPA (1985)
2 Total surface area of the body, m2
(BPwhole body)
No Male 1.95 1.62 – 2.41 Mean 1.95 (5% 1.62, 95% 2.41)
US EPA (1985)
Female 1.76 1.40 – 2.24 Mean 1.76 (5% 1.40, 95% 2.24)
US EPA (1985)
3 Total surface area of the back, m2 No 0.155 US EPA 2000
4 Lcn/Bphands_top No 0.5 ?
5 Lcn/Bphands-palms No 0.5
6 Lcn/BPback No 1
7 Icn/BPbody-ch Crop height(m)
US EPA 1996
0-0.19 Male 0.066
Female 0.066
122

0.2-0.59 Male 0.2
Female 0.19
0.6-0.99 Male 0.4
Female 0.39
1-1.29 Backpack model
Male 0.66
Female 0.64
1-1.29 gun and hose model
Male 0.86
Female 0.81
>1.3 Backpack model
Male 0.74
Female 0.68
>1.3 gun and hose model
Male 0.94
Female 0.86
Table 6 Frequency of contacts according to row space
No Input Variable User input Number of contacts
Row Space (m)
Base on
8 Number of Contacts according to Row space
no 1-2 >1.5 (Brouwer et al., 2001) (Cohen Hubal et al., 2005) 3-4 0.91 – 1.49
5-6 <90
Table 7. Overview of induction bowl contamination after emptying a full container
Mathers et al 2000 Glass et al 2009 Glass et al 2009
Container
size
Induction bowl
contamination
(L)
SD Induction bowl
contamination
(L)
Induction bowl
contamination
(L)
Induction bowl
contamination
(L)
Induction bowl
contamination
(L)
Surface area
induction bowl
(m2)
Average surfac
contamination
(L∙m-2)
1 1.00E-06 6.00E-06 0,25 4,00E-06
5 3.10E-06 1.13E-
05
3.10E-06 7.00E-06 0,25 1,22E-05
10 5.8E-06 8.70E-
06
3.80E-05 1.01E-04 0,25 8,76E-05
20 5.00E-05 7.00E-
05
5.10E-05 8.60E-05 2.20E-04 3.80E-04 0,25 4,28E-04
123

Table 8. Default values for Transfer Coefficients.
Cf Description / specifics Reference N median AM SD min max
Cfgrasp
Donor Surface = Spray tank Surface to glove, Smudge, >12 hours, Dry, Mass/mass, Liquid
Ramwell et al., 2010 Decontamination of agricultural sprayers, HSE report RR792
6 48.5 47.8 23.2 21 79
Cfsmudge Donor Surface= treated crop to hands, >12 hours, Wet and Dry, Mass/mass.
16 8 11.21 12.7 1,9 45.5
(f) Figures
Figure 1. Comparison of geometric means against true values for all hand PDE models. Red
represents the Backpack Downwards scenario, Blue represents the Gun and Hose
Downwards scenario 2, Black is the Gun and Hose Up and Downwards scenario 3 and green
is Backpack Up and Downwards scenario 4.
0.001 0.01 0.1 1 10 100 1000 10000 100000 1e+06 1e+070.001
0.01
0.1
1
10
100
1000
10000
100000
1e+06
1e+07
log10 (Mean(Model outputs(µg/hands)))
log 10
(Dat
a(µg
/han
ds))
124

Figure 2. Comparison of geometric means against true values for all whole body excluding hand PDE
models. Red represents the Backpack Downwards scenario, Blue represents the Gun and
Hose Downwards scenario 2, Black is the Gun and Hose Up and Downwards scenario 3 and
green is Backpack Up and Downwards scenario 4.
Figure 3. Hands exposure. Plot of 95% CIs (grey lines), geometric means (red dots) and medians (black dashed lines) for the log10 (model outputs) with the log10 (measured potential dermal exposure (hands)*) (blue diamonds). (Backpack Downwards scenario). * Including data sets which have model inputs that were imputed
1 10 100 1000 10000 100000 1e+06 1e+07 1e+08 1e+091
10
100
1000
10000
100000
1e+06
1e+07
1e+08
1e+09
log10 (Mean(Model outputs(µg/body)))
log 10
(Dat
a(µg
/bod
y))
0 20 40 60 80 100 120 140 1600.1
1
10
100
1000
10000
100000
1e+06
1e+07
Data index
log 10
(Mod
el o
utpu
ts (µ
g/ha
nds)
)
125

Figure 4. Whole body (excluding hands) exposure. Plot of 95% CIs (grey lines), geometric means (red
dots) and medians (black dashed lines) for the log10 (model outputs) with the log10 (measured potential dermal exposure (whole body excluding hands)*) (blue diamonds). (Backpack Downwards scenario).* Including data sets which have model inputs that were imputed
Figure 5. Hands exposure. Plot of 95% CIs (grey lines), geometric means (red dots) and medians (black dashed lines) for the log10 (model outputs) with the log10 (measured potential dermal exposure (hands)*) (blue diamonds). (Backpack up and downwards scenario). * Including data sets which have model inputs that were imputed
0 20 40 60 80 100 120 140 160 1801
10
100
1000
10000
100000
1e+06
1e+07
1e+08
Data index
log 10
(Mod
el o
utpu
ts (µ
g/bo
dy))
0 10 20 30 40 50 60 70 80 90 1000.001
0.01
0.1
1
10
100
1000
10000
100000
1e+06
Data index
log 10
(Mod
el o
utpu
ts (µ
g/ha
nds)
)
126

Figure 6. Whole body (excluding hands) exposure. Plot of 95% CIs (grey lines), geometric means (red
dots) and medians (black dashed lines) for the log10 (model outputs) with the log10 (measured potential dermal exposure (whole body excluding hands)*) (blue diamonds). (Backpack up and downwards scenario). * Including data sets which have model inputs that were imputed
0 20 40 60 80 100 1201
10
100
1000
10000
100000
1e+06
1e+07
Data index
log 10
(Mod
el o
utpu
ts (µ
g/bo
dy))
127

Figure 7. Hand exposure. Plot of 95% CIs (grey lines), geometric means (red dots) and medians (black
dashed lines) for the log10 (model outputs) with the log10 (measured potential dermal exposure (hands)*) (blue diamonds). (Gun and hose downwards scenario). *Including data sets which have model inputs that were imputed
Figure 8. Whole body (excluding hand) exposure. Plot of 95% CIs (grey lines), geometric means (red dots) and medians (black dashed lines) for the log10 (model outputs) with the log10 (measured potential dermal exposure (whole body excluding hands)*) (blue diamonds). (Gun and hose downwards scenario). *Including data sets which have model inputs that were imputed
0 10 20 30 40 50 60 70 80 90 100
10
100
1000
10000
100000
Data index
log 10
(Mod
el o
utpu
ts (µ
g/ha
nds)
)
0 10 20 30 40 50 60 70 8010
100
1000
10000
100000
1e+06
1e+07
Data index
log 10
(Mod
el o
utpu
ts (µ
g/bo
dy))
128

Figure 9. Hand exposure. Plot of 95% CIs (grey lines), geometric means (red dots) and medians (black
dashed lines) for the log10 (model outputs) with the log10 (measured potential dermal exposure (hands)*). (Gun and hose up and downwards scenario). * Including data sets which have model inputs that were imputed) (blue diamonds)
Figure 10. Whole body (excluding hands) exposure. Plot of 95% CIs (grey lines), geometric means (red dots) and medians (black dashed lines) for the log10 (model outputs) with the log10 (measured potential dermal exposure (whole body excluding hands)*) (Gun and hose up and downwards scenario) * including data sets which have model inputs that were imputed) (blue diamonds)
0 20 40 60 80 100 120 1400.1
1
10
100
1000
10000
100000
Data index
log 10
(Mod
el o
utpu
ts (µ
g/ha
nds)
)
0 20 40 60 80 100 120 140 16010
100
1000
10000
100000
1e+06
1e+07
1e+08
1e+09
Data index
log 10
(Mod
el o
utpu
ts (µ
g/bo
dy))
129

3.3 Aggregated exposure
3.3.1 External exposure
As presented in the previous section, potential inhalation and dermal exposure models were
developed for each scenario. The ingestion estimates are based on input from the dermal model and
default estimates of hand-to-mouth events. For the inhalation and dermal exposure models, a
distinction is made between potential and actual exposure estimates. For dermal exposure, model
estimates distinguish between body surface areas of males and females (Appendix I).
Potential exposure
The ‘potential’ exposure models predict an operator’s exposure to PPP without taking into account
(protective) clothing or respiratory protective equipment. The potential exposure level therefore
reflects the exposure levels typically measured during field studies, e.g. an inhalation sample in the
breathing zone of the operator (and not taking account of the effect of respirators), or the amount
of PPP sampled on the exterior of the body (on gloves and clothing, but also on the skin if
unprotected). These models can therefore be calibrated and validated using potential exposure
data.
Actual exposure
The estimates of the potential exposure models are subsequently used for ‘actual’ exposure
estimates. An actual estimate represents the predicted PPP exposure considering the reduction in
exposure due to skin or respiratory protection. In some instances, the actual and potential exposure
will be equal because no protection was used. For ingestion exposure the potential exposure is equal
to the actual exposure. However, the effect of respiratory equipment (gloves, respirators) needs to
be considered to estimate the (default) frequency of hand to mouth contacts. The ingestion
exposure will also be estimated separately for each scenario (since hand contamination levels may
vary).
The actual estimates cannot always be validated because of a lack of data. Data on actual exposures
are generally limited to measurements taken inside respirators, or skin samples taken underneath
clothing or PPE. Extensive literature reviews and analyses of data on the effectiveness of PPE are
applied as default reduction factors in the models (see separate report from reserve fund proposal
on this). 130

For dermal exposure, the BROWSE models distinguish between hand exposure and body exposure.
However, to include the use of PPE and work wear as risk management measures, the models
distinguish between hand, body and head exposure. For this purpose, an estimate is made to
differentiate between body and head exposure. Based on a literature review of body part
distributions (Appendix F), the following distributions of head exposure compared to the total body
exposures are presented in Table 21.
3.3.1.1 Inhalation exposure (Ia)
The actual inhalation exposure (Ia) is estimated using the following equation:
Ia = Ipde * Prpe
Where,
Ipde potential inhalation exposure to a.s. in droplet spray in µg/m3
Prpe protection factor of respiratory protective equipment (RPE) (Table 20)
3.3.1.2 Dermal exposure (Da)
The actual dermal exposure (Da) is estimated using the following equation:
Da = (Dph * Pppe) + (Dpw * Pppe)
Where,
Dph Potential dermal exposure to a.s. in µg on the hands
Dpw Potential dermal exposure to a.s. in µg on the whole body (excl. hands)
Pppe Protection factor of personal protective equipment (PPE) (Table 20)
3.3.1.3 Ingestion exposure (Ina)
Ingestion of pesticides may occur as a result of hand-to-mouth contacts in the workplace, also
referred to as inadvertent ingestion exposure. It has been estimated that 16% of the working
population in the UK may be exposed to hazardous materials by the ingestion route (Cherrie et al,
2006).
To estimate ingestion exposure, a similar approach was used as described by Gorman NG et al
(2012). The actual ingestion exposure (Ina) is estimated as follows:
131

Ina = Dph * Am/Ah * SE * (N*t)
Ina ingestion exposure, µg (per scenario)
Dph potential dermal exposure to a.s. in µg on both hands (per scenario)
Am area of one hand making contact with the mouth [cm2] (fixed 75cm2) (14% from
EPA, Michaud)
Ah area of both hands [cm2] (EPA’s value for male hands of 1070cm2)
Am/Ah 0.07
SE skin to mouth transfer factor (0.43); see Table 23
N number of hand-to-mouth contacts (events/hr); Table 22
t exposure time of scenario in hrs (minutes/60; roundup=1). So N*t ≥1 roundup
More information of each parameter is presented in Table 22. Evidence for the input parameters of
ingestion exposure was obtained from various sources. The potential dermal exposure to a.s. on
both hands (Dph) for a given per scenario is considered the mass balance input. The relative
(contaminated) hand surface area (Am) that may contact the peri-oral or oral cavity is estimated
using an EPA default value (14%), assuming that only the fingertips of one hands are involved in a
hand-to-mouth contact event. A hand-to-mouth transfer factor (0.43) was calculated using EPA and
IOM data (Table 23). The latter value is derived for hand-to-mouth (oral cavity) transfer, but does
not include the transfer efficiency from the peri-oral area to the oral cavity Since hand-to-mouth
contacts may primarily involve contacts with the peri-oral region (and much less contacts directly
with the mouth), the value of 0.43 may be too conservative. A value of 10% (0.1) may also be
considered for the transfer efficiency into the mouth (Cherrie et al, 2006).
To derive values for the frequency of hand-to-mouth contacts, an observational study from Gorman
NG & colleagues (under review) was used. They observed workers’ hand-to-mouth behaviors in
different industries, worksites and tasks. The majority of the contacts occurred between the hands
and peri-oral area (lips and within 2cm of the lips). Interestingly, the hand-to-mouth contact
frequencies were significantly higher among workers in the high risk perception group. The high risk
group is workers who are aware that they are using highly hazardous or toxic substances. This
suggests that workers working with substances they consider hazardous may not necessarily reduce
their hand-to-mouth contact behavior. It was found that the hand-to-mouth contact frequency
(contacts/hr) was significantly higher between-tasks than during tasks, and significantly higher in
132

industrial worksites (AM=7.6; 6.5-26) compared with laboratories (AM=0.5; 0-4). Among workers
who used personal protective equipment (PPE), the contact frequencies (contacts/hr) were lower
when gloves (AM=1.2) and respirators (AM=0.1) were worn, than when they were not worn (gloves;
AM=4.8; respirators; AM=5.3).
To derive default values for the ‘number of hand-to-mouth contacts’ (N), we assumed that the
operator exposure scenarios may be more comparable to the ‘laboratory/research’ work sectors.
The reason for this assumption is that this sector adopted more stringent ‘best practices’ and
respirator use compared with the ‘industrial sector’. Since the WP1 models assess task-based
exposures, the ‘between tasks’ hand-to-mouth contacts are excluded. We decided to distinguish
between the presence and absence of respirators or glove use. Since the effect of the combined use
of both gloves and respirators were not presented in the study, a hand-to-mouth contact frequency
(N) was derived for ‘use of gloves/respirators’. Considering the overall outcome of the study
described earlier, it was decided to assign a uniform distribution for when gloves/respirators are
worn (0.1; 1.0), and when not worn (0.5; 5.0).
Existing PPP models do not take account of ingestion exposure for operators. Observational
evidence is available that indicates that ingestion exposure is possible through hand-to-mouth
contacts in different industries (Gorman Ng et al, 2013). However, limited evidence is available from
epidemiological studies to substantiate actual ingestion exposure, e.g. using biomonitoring. With
that in mind, and the evidence currently available, we feel that it is appropriate to include an
ingestion estimate in the WP1 operator models. Considering the fact that the ingestion exposure
route is new and not commonly used for regulatory purposes in the agricultural sector, the ingestion
estimate is by default not activated in the software. However, it is up to the software user to
activate the ingestion module and interpret the ingestion exposure predicted by the model.
3.3.2 Internal exposure
Absorption values together with the bodyweight are applied to convert the external (actual)
exposure to the internal exposure. This is done per exposure route in order to compare the exposure
with the AOEL (given in mg/kg bw). For inhalation and ingestion exposure a default absorption of
100% is used. The absorption value used for dermal exposure is substance-specific and also specific
for pure and diluted formulations (e.g. different for ML and boom spraying scenarios).
133

The EFSA guidelines are used to take account of the variations. The software therefore allows users
to enter their own values.
(g) Tables
Table 20: Personal protective equipment (PPE) and work wear reduction factors
PPE or work wear item Protection factor (by which exposure in absence of protection should be multiplied)
Specific exposure value affected
Type or source of value
Hand exposure Protective (chemical resistant) gloves
Liquids 10% Solids 5%
Dermal exposure – hands only
Constant-EFSA
Gloves unspecified 3.95% M/L Liquids 0.85% Solids 4.52%
Dermal exposure – hands only
75th percentile- BROWSE
Gloves unspecified 0.00-97.07% M/L Liquids 0.00-19.17% Solids 0.00-56.93%
Dermal exposure – hands only
Distribution- BROWSE
Latex/PE/Vinyl/PVC gloves
5.51% M/L Liquids: 0.18%
Dermal exposure – hands only
75th percentile- BROWSE
Latex/PE/Vinyl/PVC gloves
0.00-70.85% M/L Liquids: 0.00-4.05%
Dermal exposure – hands only
Distribution- BROWSE
Nitrile gloves 3.14% M/L Liquids 0.85% Solids 4.15%
Dermal exposure – hands only
75th percentile- BROWSE
Nitrile gloves 0.00-97.07% M/L Liquids 0.00-19.17% Solids 0.00-56.93%
Dermal exposure – hands only
Distribution- BROWSE
Body exposure Long sleeved shirt and trousers (Working clothing)
10%
Dermal exposure – body only
Constant-EFSA
Unspecified work clothing
7.2% Dermal exposure – body only
75th percentile- BROWSE
Unspecified work clothing
0.01-71.31% Dermal exposure – body only
Distribution- BROWSE
Protective coverall 10%
Dermal exposure – body only
Constant-EFSA
Protective coverall certified
5%
Dermal exposure – body only
Constant-EFSA
134

PPE or work wear item Protection factor
(by which exposure in absence of protection should be multiplied)
Specific exposure value affected
Type or source of value
Cotton coverall 9.60% Dermal exposure – body only
75th percentile- BROWSE
Cotton coverall 0.01-50.07% Dermal exposure – body only
Distribution- BROWSE
Polyester-cotton coverall
4.25% Dermal exposure – body only
75th percentile- BROWSE
Polyester-cotton coverall
0.05-71.31% Dermal exposure – body only
Distribution- BROWSE
Polyester-cotton coverall for high-intensity crops (hand-held spraying only)
29.08% Dermal exposure – body only
75th percentile- BROWSE
Polyester-cotton coverall for high-intensity crops (hand-held spraying only)
0.16-52.92% Dermal exposure – body only
Distribution- BROWSE
Uncertified rain suit 0.2% Dermal exposure – body only
AM- BROWSE (indicative value)
Certified PPE 0.1% Dermal exposure – body only
AM- BROWSE (indicative value)
Head exposure Hood and visor 5% Dermal exposure –
head only Constant-EFSA
Hood 50% Dermal exposure – head only
Constant-EFSA
RPE mask type
Filter type
Half and full face masks
FP1, P1 and similar
80% Dermal exposure – head only
Constant-EFSA
FFP2, P2 and similar
80% Dermal exposure – head only
Constant-EFSA
Inhalation exposure RPE mask type
Filter type
Half and full face masks
FP1, P1 and similar
25% Inhalation exposure Constant-EFSA
FFP2, P2 and similar
10% Inhalation exposure Constant-EFSA
135

Table 21: Distribution of percentage of dermal head exposure compared to dermal total exposure*
Scenario Distribution of % head exposure compared to total dermal exposure (head, body, hands)
Boom spraying 0-6% Orchard spraying 0-17% Hand held spraying high level 0-12% Hand held spraying low level 0-1% Mixing and loading 0-1% *the upper percentage is currently proposed and programmed in the software
Table 22: Ingestion exposure - main user and model inputs
No User inputs Model inputs Lower Upper Based on 1 n/a Potential dermal exposure to a.s. in µg on
both hands (Boom spraying) (Dph_bs)
Full distribution
- BS hand model output
2 n/a Potential dermal exposure to a.s. in µg on both hands (Mixing & loading) (Dph_ml)
Full distribution
- M&L hand model output
3 n/a Area of one hand making contact with the mouth (cm2) (Am)
Fixed 75 cm2
- (14% from EPA, Michaud)
4 n/a Area of both hands [cm2] (Ah) Fixed 1070 cm2
- Appendix I
5 n/a Skin to mouth transfer factor (SE) Fixed 0.43 - EPA, IOM data (Table 23)
6 PPE inputs (relevant for both BS and ML)
Number of hand-to-mouth contacts# (events/hr) (i) if gloves or respirators are used
(events/scenario) if gloves or respirators are not used (events/scenario)
uniform 0.1 0.5
uniform 1.0 5.0
Cherrie et al 2007; Gorman Ng (in press)
7 Exposure duration (per scenario)
Exposure time of scenario in hrs (minutes/60; roundup=1). So N*t ≥1 roundup
Scenario-specific
- -
*different values may be proposed for the frequency of hand-to-mouth contacts to distinguish between PPE use and no PPE use #assuming primarily peri-oral contact
Table 23: Analysis outputs to derive a skin-to-mouth transfer factor (SE)
IOM EPA Combined N 12 27 39 AM 0.14 0.48 0.38 SD 0.31 0.13 0.26 GM - * 0.46 - * Min -0.14 0.22 -0.14 50th percentile 0.05 0.50 0.43~
136

IOM EPA Combined 75th percentile 0.22 0.59 0.57 90th percentile 0.33 0.62 0.61 95th percentile 0.64 0.66 0.67 99th percentile 0.93 0.70 0.89 Max 1.00 0.71 1.00 ~ The 50th percentile was used for the skin to mouth transfer factor (0.43) * Due to negative values
3.4 Quality assurance and testing procedures
(h) Exposure data
For the inclusion or non-inclusion of exposure data collected from literature a decision tree was used
(see Figure 1) for uptake of these data in the exposure database used for modeling purposes. Studies
should contain information on inhalation, dermal (potential and/or actual) or biomonitoring
exposure data, preferably at the level of individual measurements (raw data), but at least with
summary statistics with regard to measured exposure levels (minimum, maximum and AM/GM,
SD/GSD).
Figure 19: Decision tree acceptance exposure data
For included studies, the study design is adequately described (with general information like year of
study, location, target persons, site of application, indoor/outdoor, environmental conditions, etc.),
including the methods used to measure exposure (whole body, patch techniques, etc.) and the
sampling devices/material used. In principle, only studies in which personal measurements are
performed are included (i.e. stationary measurements will only be used for scenarios where no
personal measurements are available for operators. The guidelines (e.g. GLP) under which the study
Exposure data B,R,O,W?
Adequate description study design and
monitoring methods
Analysing methodology
adequate described
Contextual information on
exposure determinants
available
Inclusion in database
No inclusion
No inclusion
No inclusion
137

is carried out are described. The number of study subjects measured, test sites etc. are clearly
described. All the conditions of the study are reported so a decision on representativeness and
relevance to the models to be developed can be made.
As a minimum the study reports for included studies contain an outline or reference to description
of the analytical method. The analytical method used should be a validated method.
Ideally, the report should state if the data have been corrected for either for field or laboratory
recoveries. Also how data <LOD or <LOQ are being handled is described properly.
Although the data from the EUROPOEM database was not checked (see paragraph 6.2), based on
the information available in the executive summaries of the studies and information from persons
involved in the EUROPOEM project itself, the analytical quality of the study and the
representativeness of the study were combined in an overall quality score, which has been
documented in the database, together with the underlying remarks about the analytical quality,
representativeness and other remarks. This information was taken into account when selecting data
for the use during the model development, for which a tiered approach was used, depending on the
availability of data for certain scenarios. The inclusion of data from studies was discussed within the
project team.
(i) Development of the exposure database
All the exposure data that are entered in the database by a project member have been checked on
good entry by another person from the project team and errors have been corrected. The starting
point of the BROWSE exposure database was the EUROPOEM database, consisting of already
entered data, including quality check. The data from the original EUROPOEM database have not
been checked again, in part because it was known that this was already done extensively within the
EUROPOEM project, and in part because we had no access to the a large part of the original study
reports.
138

(j) Model development
For the development of the mechanistic models all relevant literature has been reviewed and
summarized. This information was used as input for model parameters and the resulting model
algorithms and inputs were developed in the statistical package R (by FERA statistician). The
programmed models and model outputs were checked by TNO. All the relevant contextual
information in the database was translated and coded according to relevant model parameters
required to test the models. In case of missing information, empirical sampling was performed to
obtain imputed values. All model runs and testing was critically evaluated, checked and re-run if
required to exclude errors in the models.
(k) Software
The programmed model in R was checked by FERA and directly used to develop the software. All
code was peer reviewed within the software team and then tested by partners to ensure it
performed as intended, before release to the BROWSE Advisory Panel and stakeholders for further
testing.
139

4 Comparison with existing models
The comparison with existing models is describes in “Operator exposure: Comparison of BROWSE
model with the existing models: Annex to the Final WP1 Technical Report” by Charistou et al, 2014.
140

5 Model outcome interpretation and level of conservatism
5.1 Exposure outcomes
Potential exposure estimates of the WP1 models are expressed differently depending on the route
of exposure, e.g. inhalation (µg/m3), dermal (µg/body part) and ingestion (µg). These values are
converted to mg/kg bodyweight for each exposure route, distinguishing between potential and
actual exposure after taking account of the effect of PPE and/or work clothing. Subsequently these
estimates are translated to the absorbed amount (mg/kg body weight) and the proportion of the
AOEL or AAOEL. The model outputs can therefore relate to longer-term or acute estimates related to
the AOEL or AAOEL (75th and 95th percentiles respectively).
5.2 Routes and sources of exposure included
Where appropriate, the different routes of exposure (inhalation, dermal and ingestion) are included
in the respective models. The dermal exposure pathways that are often neglected in exposure
modeling, like bulk/splashes, are also included if relevant, for instance in the M&L dermal model.
Also, model estimates always include both hand and body exposures. The models only estimates
primary exposure (direct exposure due to work performed by the operator him/herself), and thus
not from possible secondary sources of exposure (e.g. other application sources in the vicinity).
5.3 Exposure scenarios included
The operator exposure models are developed for the following scenarios:
• Boom spraying
• Mixing & loading (liquids and solids)
• Orchard spraying
• Hand-held spraying
Depending on input parameters like vehicle sprayer type, mixing and loading method, sprayed area,
tank volume, the presence of a cabin, wearing PPE etc. these scenarios are further subdivided in
order to make a fit-for purpose exposure assessment for reasonable worst-case and typical
scenarios.
141

5.4 Population
The models are considered relevant for both males and females and all age groups, although no
explicit account was made to include differences between these population groups. An exception is
where a distinction is made between body surface areas of males and females (in the dermal
models). Although most of the available information on operator exposure, especially the exposure
data, is based on studies with males, the mechanistic models with their underlying parameters are
considered also applicable for estimating exposure of female operators, although some difference in
actual working practices may exist. The models intend to cover operators that perform their work
according to Good Agricultural Practice (GAP). Misuse during handling of PPPs is not taken into
account.
5.5 Representativeness of model outcomes versus “real world”
Model inputs are mostly obtained from experimental studies or evidence from literature. These
model inputs (distributions) represent a range (with lower and upper values) of the best available
data on ‘actual’ conditions in practice. Model parameter distributions are sometimes based on
small-sized populations (or number of operators), limited experimental data (and conditions of use)
and may not always include differences found between field studies or workplace settings. This will
obviously increase the level of uncertainty in the model parameter inputs and model outputs.
5.6 Level of uncertainty and variability
All the WP1 models are probabilistic and dependent on iterations of (distributions) of model input
parameters. In turn, the models are capable of producing an exposure distribution. The median,
75th percentile, and 95th percentile are presented to the user in the software. Variability and
uncertainty were quantified using distributions for a large number of internal model parameters (see
WP1 Technical Report), and in some of the options for user inputs (body weight, breathing rate and
PPE). Therefore the percentiles output by the model represent the effect of variability and
uncertainty in all these factors on the exposure estimate. This output variance has also been
referred to in this report when carrying out sensitivity analysis (SA). One of the outputs from SA is a
table in which the relative contributions to the total output variation can be quantified and ranked
to show their relative impact on the model output.
142

5.7 Model comparison as indication for level of conservatism
An indication of the level of conservatism can be seen from the model testing as presented in this
report. The models produce exposure estimates that are in the overall range of the available
exposure data. However, these estimates do not always represent the required level of conservatism
expected for regulatory risk assessment. On the other hand, a considerable part of the data used for
testing is relatively old, and therefore the exposure levels in the available test set may be higher and
thus less representative of current agricultural practices and conditions. Based on these
considerations, and the fact that only a limited amount of recent exposure data was available during
model development, it is assumed that the level of conservatism of the models is applicable for
current agricultural practices and conditions.
5.8 Overall level of conservatism
The level of conservatism in the models and final distributions of model inputs and defaults is
reviewed (in collaboration with other work packages) to ensure an acceptable level of conservatism.
143

6 Conclusion
(a) Rationale for the modeling approach chosen
The aim of WP1 was to develop a single, new and improved modeling framework for operator
exposure, to integrate all available exposure data and take explicit account of key factors and
mechanisms influencing exposure. To meet this objective, it was decided to use a mechanistic and
probabilistic modeling approach. Unfortunately WP1 was not able to get access to new operator
exposure data. However, an advantage of mechanistic models is that exposure data is not required
as direct input for model development, and that the model inputs can be improved and updated on
a regular basis using new evidence. WP1 was also fortunate to get access to experimental data that
could provide indicative input distributions in some of the models.
For the most part, the data that were collated in the BROWSE database and used for testing /
checking of the WP1 operator models mostly consisted of existing and old data (often dating back to
the 1990s and earlier). This data (mostly EUROPOEM) has previously been found outdated, of low
quality and not representative in the rapidly (technological) advancing agricultural sector. It is also
often referred to as low quality because of high variability seen in the data itself. Whether this is
true or not, it is clear that the high variability in operator exposure data is also evident in new data.
An example is the modeling approach described in the development of a new (empirical) agricultural
operator exposure model (AOEM) (BfR, 2003; Großkopf et al, 2013). The AOEM is based on new
empirical data in which the determinants influencing exposure are unraveled and explicitly taken
into account. The latter publication emphasizes the importance of more detailed modeling
approaches that are required for operator exposure models.
(b) Status of models
The models presented in this report have not been thoroughly validated. In order to do so, new and
good quality data is required. However, outputs of the respective models were tested / checked with
(mostly outdated) datasets extracted from the BROWSE database. As complete datasets were not
always available for testing, imputed datasets were also used.
Compared to existing models, the BROWSE operator models include more model parameters and
distinguish between more exposure routes or exposure types (e.g. both hand and whole body,
ingestion).
In general, the models produce exposure estimates that are in the overall range of the available
exposure data. However, when plotting the confidence intervals for each model output, it is clear 144

that the model outputs do not always capture all the variance in the highly variable exposure data.
Suppose the data used for testing can be considered acceptable, these model outputs may under- or
over-estimate exposure. However, it is evident from the model testing plots that imputed data
dominate the outliers in the data versus model comparisons. As imputed data is commonly (and
often exclusively) used in the model testing, it was not possible to estimate the actual variance
explained by the respective models. It is, however, evident that the whole body dermal models
explain more variance than the hand models. Due to the fact that few ‘true datasets’ were available
for testing, the effect of between-study variances etc. were not investigated. Also, no conclusions
can be drawn from the testing results in terms of the selected (sub-) scenarios, e.g. whether it is
acceptable to develop a single model for mixing & loading for all applications (field sprayers,
broadcast sprayers, hand-held, aerial).
(c) Use of models in regulatory framework
With the development of the operator exposure models and the integration into the software, the
aim is to contribute to the implementation of Regulation (EC) 1107/2009 and Dir. 2009/128/EC on
the Sustainable Use of PPPs. Much effort was put into the integration of current agricultural
practices in the EU from publications and survey data (from the BROWSE and EFSA survey data, e.g.
Glass et al, 2012). With the implementation of the models in a user-friendly tool with sufficient
flexibility for the user to make use of reasonable worst case defaults given in the software or the use
of own values, the tool can be used to perform risk assessments in the framework of Regulation (EC)
1107/2009. Next to this the tool can identify risk indicators (for example the effect of the use of a
cabin on exposure, drift-reducing nozzles, etc.) meeting the requirements of Dir. 2009/128/EC on
the Sustainable Use of PPPs.
145

7 Recommendations for future development and refinement
In order to keep the models up to date and refine them where necessary after thorough user
feedback, the following steps can be considered.
• A thorough analysis of all the available dermal exposure data is proposed to determine the
differences in dermal sampling techniques (e.g. interception and removal techniques) and the
effect on the variability found in exposure data. This might give insight into the effect of different
dermal sampling techniques on dermal exposure, and a possible introduction of a correction
factor
• In case new, more recent, exposure data becomes available, this can be used to check and if
necessary refine the models. For example recently the AOEM data became available so it would
be good for the future to use this data to validation and refinement of the current models.
• More extensive final sensitivity analyses of the algorithms can be performed. This could include
different categorical scenario inputs.
• An additional validation of the models could be performed using new data that has not been
used for model development.
146

(a) Disclaimer
The model comparisons described in a separate annex (see reference in chapter 4) and calculations
included in the report are performed with software developed by FERA which is at this moment still
under development. Therefore no rights can be derived from the results presented in this report.
147

8 References
Abdelbagi, H., & Adams, A. (1987). Influence of droplet size, air-assistance and electrostatic charge upon the distribution of ultra-low-volume sprays on tomatoes. Crop Protection, 6, 226–233. Retrieved from http://www.sciencedirect.com/science/article/pii/0261219487900433
Berger-Preiss, E., Boehncke, A., Könnecker, G., Mangelsdorf, I., Holthenrich, D., & Koch, W. (2005). Inhalational and dermal exposures during spray application of biocides. International Journal of Hygiene and Environmental Health, 208(5), 357–72. doi:10.1016/j.ijheh.2005.04.006
Brouwer, D., Semple, S., Marquart, J., & Cherrie, J. (2001). A dermal model for spray painters. Part I: Subjective exposure modelling of spray paint deposition. Annals of Occupational …, 45(1), 15–23. Retrieved from http://annhyg.oxfordjournals.org/content/45/1/15.short
BROWSE. (2011). Prioritisation of scenarios and overall model objectives for operator, worker, bystander & resident exposure modelling and identification of data required from WP4.
Cohen Hubal, E. a, Suggs, J. C., Nishioka, M. G., & Ivancic, W. a. (2005). Characterizing residue transfer efficiencies using a fluorescent imaging technique. Journal of Exposure Analysis and Environmental Epidemiology, 15(3), 261–70. doi:10.1038/sj.jea.7500400
Dosemeci, M. (2002). A Quantitative Approach for Estimating Exposure to Pesticides in the Agricultural Health Study. Annals of Occupational Hygiene, 46(2), 245–260. doi:10.1093/annhyg/mef011
FAO. (2001a). Guidelines on minimun requirements for agricultural pesticide application equipment. Volume one.
FAO. (2001b). Guidelines on standards for agricultural pesticide application equipment and related test procedures, vol. 1.
FAO. (2013). International Code of Conduct on the Distribution and Use of Pesticides Annotated list of Technical Guidelines for the implementation of the International Code of Conduct on the Distribution and Use of Pesticides, (January).
Gil, E., Escolà, a., Rosell, J. R., Planas, S., & Val, L. (2007). Variable rate application of plant protection products in vineyard using ultrasonic sensors. Crop Protection, 26(8), 1287–1297. doi:10.1016/j.cropro.2006.11.003
Hughes, E. a, Flores, A. P., Ramos, L. M., Zalts, A., Richard Glass, C., & Montserrat, J. M. (2008). Potential dermal exposure to deltamethrin and risk assessment for manual sprayers: influence of crop type. The Science of the Total Environment, 391(1), 34–40. doi:10.1016/j.scitotenv.2007.09.034
Juste, F., Sanchez, S., Ibanez, R., Val, L., & Garcia, C. (1990). Measurement of spray deposition and efficiency of pesticide application in citrus orchards. Journal of Agricultural …, (August 1988),
148

187–196. Retrieved from http://www.sciencedirect.com/science/article/pii/S0021863405801258
Leonas, K. K., Yu, X. K., & Hall, D. (1992). Deposition Patterns on Garments during Application of Lawn and Garden Chemicals: A Comparison of Six Equipment Types, 234, 230–234.
Machera, K. (2003). Determination of Potential Dermal and Inhalation Operator Exposure to Malathion in Greenhouses with the Whole Body Dosimetry Method. Annals of Occupational Hygiene, 47(1), 61–70. doi:10.1093/annhyg/mef097
Marquart, J. (2003). Determinants of Dermal Exposure Relevant for Exposure Modelling in Regulatory Risk Assessment. Annals of Occupational Hygiene, 47(8), 599–607. doi:10.1093/annhyg/meg096
Matuo, T., & Matuo, Y. K. (1998). Efficiency of Safety Measures Applied to a Manual Knapsack Sprayer for Paraquat Application to Maize ( Zea mays L .), 701, 698–701.
Nuyttens, D., Braekman, P., Windey, S., & Sonck, B. (2009). Potential dermal pesticide exposure affected by greenhouse spray application technique. Pest Management Science, 65(7), 781–90. doi:10.1002/ps.1755
Rincón, V., Páez, F., & Sánchez-Hermosilla, J. (2009). Estimation of Leaf-Area Index in greenhouse tomato crop to determine the volume rate to spray. cirg.ageng2012.org. Retrieved from http://www.cirg.ageng2012.org/images/fotosg/tabla_137_C0402.pdf
Sánchez-Hermosilla, J., Rincón, V. J., Páez, F., Agüera, F., & Carvajal, F. (2011). Field evaluation of a self-propelled sprayer and effects of the application rate on spray deposition and losses to the ground in greenhouse tomato crops. Pest Management Science, 67(8), 942–947. doi:10.1002/ps.2135
Sanjrani, W. (1990). Effect of application volume and method on spray operator contamination by insecticide during cotton spraying, 9(October).
Smith, D., & Askew, S. (2000). Droplet size and leaf morphology effects on pesticide spray deposition. Transactions of the …, 43(2), 255–259. Retrieved from http://www.prairieswine.com/pdf/2987.pdf
Uk, S. (1977). Tracing insecticide spray droplets by sizes on natural surfaces. The state of the art and its value. Pesticide Science, 8(5), 501–509. doi:10.1002/ps.2780080512
Van Zyl, S. a., Brink, J.-C., Calitz, F. J., & Fourie, P. H. (2010). Effects of adjuvants on deposition efficiency of fenhexamid sprays applied to Chardonnay grapevine foliage. Crop Protection, 29(8), 843–852. doi:10.1016/j.cropro.2010.04.017
Wicke, H., Ba, G., & Frie, R. (1999). Comparison of spray operator exposure during orchard spraying with hand-held equipment fitted with standard and air injector nozzles, 18, 0–7.
149

Zabkiewicz, J. a. (2007). Spray formulation efficacy—holistic and futuristic perspectives. Crop
Protection, 26(3), 312–319. doi:10.1016/j.cropro.2005.08.019
Abdelbagi, H., & Adams, A. (1987). Influence of droplet size, air-assistance and electrostatic charge upon the distribution of ultra-low-volume sprays on tomatoes. Crop Protection, 6, 226–233. Retrieved from http://www.sciencedirect.com/science/article/pii/0261219487900433
ASAE S525. Agricultural cabs – Engineering Control of Environmental Air Quality. 2003.
Balsari P, Marucco P, Oggero G. 2006. External contamination of sprayers in vineyards. Aspects of
Applied Biology. 77: 1-6
Balsari P, Marucco P. 2003. Sprayer cleaning: The importance of the sprayer adjustment on the
external contamination. ASAE Meeting Presentation, Paper number 031097.
Berger-Preiss, E., Boehncke, A., Könnecker, G., Mangelsdorf, I., Holthenrich, D., & Koch, W. (2005).
Inhalational and dermal exposures during spray application of biocides. International journal of
hygiene and environmental health, 208(5), 357–72. doi:10.1016/j.ijheh.2005.04.006
Bundesinstitut für Risikobewertung (BfR). Joint Development of a new Agricultural Operator
Exposure Model. Project report, Berlin 2013. ISBN3-943963-03-8
CEN (2004) prEN 15051 Workplace atmospheres- measurement of dustiness of bulk materials-
Requirements and test methods. CEN/TC 137 N330 Comité Européen de Normalisation, Brussels,
Belgium.
Brouwer, D., Semple, S., Marquart, J., & Cherrie, J. (2001). A dermal model for spray painters. Part I:
Subjective exposure modelling of spray paint deposition. Annals of Occupational …, 45(1), 15–23.
Retrieved from http://annhyg.oxfordjournals.org/content/45/1/15.short
Cherrie JW, Semple S, Christopher Y, Saleem A, Hughson GW, Philips A. 2006. How important is
inadvertent ingestion of hazardous substances at work? Ann. Occ. Hyg. 50 (7): 693-704
150

CropLife International. Catalogue of pesticide formulation types and international coding system.
CropLife International, Technical monograph No. 2, 6th Edition, revision May 2008, 2008.
Christopher Y. 2008. Inadvertent ingestion exposure to hazardous substances in the workplace. PhD
Thesis. Aberdeen, UK: University of Aberdeen.
Department for Environment Food and Rural Affairs (DEFRA). SID5 (Rev. 07/10). 2011. Field spray
drift studies to mature winter cereal crops with modern application practices to inform policy on
setting of buffer zones in the UK. Research Project Final Report. Project Code: PS2017
Dosemeci, M. (2002). A Quantitative Approach for Estimating Exposure to Pesticides in the
Agricultural Health Study. Annals of Occupational Hygiene, 46(2), 245–260.
doi:10.1093/annhyg/mef011
US EPA. Human Health Evaluation Manual. Part E: Supplemental Guidance for Dermal Risk
Assessment, RAG Vol. 1, 1999.
Fransman W, van Tongeren M, Cherrie JW, Tischer M, Schneider T, Schinkel J, Kromhout H, Warren
N, Goede H, Tielemans E. Advances Reach Tool (ART): Development of the mechanistic model. Ann.
Occup. Hyg. 2011; 55 (9): 957-979.
Gerritsen-Ebben MG, Brouwer DH, van Hemmen JJ. Effective Personal Protective Equipment (PPE).
Default setting of PPE for registration purposes of agrochemical and biocidal pesticides. TNO report
V7333. Zeist, 2007
Gil, E., Escolà, a., Rosell, J. R., Planas, S., & Val, L. (2007). Variable rate application of plant protection
products in vineyard using ultrasonic sensors. Crop Protection, 26(8), 1287–1297.
doi:10.1016/j.cropro.2006.11.003
Gilbert AJ, Wild SA, Mathers JJ, Glass CR. Measurement of spillage and contamination arising from
the progressive emptying of a 10 litre container and evaluation of the influence of pack size on hand
contamination. York: Central Science laboratory; 1999. Report nr FD 98/91.
151

Gilbert, AJ, C R Glass, R Lewis, JJ Mathers, F Mazzi, S A Wild. 2000. Determination of operator and
environmental contamination with simulated pouring studies into an induction bowl. Project
Number PA1701, Report Number FD 99/61.
Glass CR, Mathers JJ, Lewis RJ, Harrington PM, Gilbert AJ, Smith S. Understanding exposure to
agricultural pesticide concentrates. York: Central Science Laboratory; 2009?. Report nr HSE Contract
Ref: 4030/R51.193; DEFRA Contract Ref: PA1722.
Glass R, Garthwaite D, Pote A, et al. Collection and assessment of data relevant for non-dietary
cumulative exposure to pesticides and proposal for conceptual approaches for non-dietary
cumulative exposure assessment. External scientific report CFT/EFSA/PPR/2010/04. Supporting
publications 2012:EN-346.
Gorman Ng M, Semple S, Cherrie JW, Christopher Y, Northage C, Tielemans E, Veroughstraete V, van
Tongeren M. 2012. The relationship between inadvertent ingestion and dermal exposure pathways:
A new integrated conceptual model and a database of dermal and oral transfer efficiencies. Ann.
Occ. Hyg. Published Online First: 23 July 2012. doi:10.1093/annhyg/mes041
Großkopf C, Mielke H, Westphal D, Erdtmann-Vourliotis M, Hamey P, Bouneb F, Rautmann D,
Stauber F, Wicke W, Maasfeld W, Salazar JD, Chester G, Martin S. A new model for the prediction of
agricultural operator exposure during professional application of plant protection products in
outdoor crops. Journal of Consumer Protection and Food Safety: Published online: DOI
10.1007/s00003-013-0836-x
Hubal, Cohen, Suggs, J. C., Nishioka, M. G., & Ivancic, W. a. (2005). Characterizing residue transfer
efficiencies using a fluorescent imaging technique. Journal of exposure analysis and environmental
epidemiology, 15(3), 261–70. doi:10.1038/sj.jea.7500400
Hughes, E. a, Flores, A. P., Ramos, L. M., Zalts, A., Richard Glass, C., & Montserrat, J. M. (2008).
Potential dermal exposure to deltamethrin and risk assessment for manual sprayers: influence of
crop type. The Science of the total environment, 391(1), 34–40. doi:10.1016/j.scitotenv.2007.09.034
152

Institute of Occupational Medicine (IOM). Database of Dermal and Oral Transfer Efficiencies.
(http://www.iom-world.org/research/research-expertise/exposure-assessment/database-of-dermal-
and-oral-transfer-efficiencies/)
Juste, F., Sanchez, S., Ibanez, R., Val, L., & Garcia, C. (1990). Measurement of spray deposition and
efficiency of pesticide application in citrus orchards. Journal of Agricultural …, (August 1988), 187–
196. Retrieved from http://www.sciencedirect.com/science/article/pii/S0021863405801258
Kennedy, M. C., Anderson, C. W., Conti S., and O’Hagan. (2006). Case Studies in Gaussian Process
Modelling of Computer Codes. Reliability Engineering and System Safety. 91, 1301—1309.
Lebailly P, Bouchart V, Baldi I, Lecluse Y, Heutte N, Gislard A, Malas JP. 2009. Exposure to pesticides in open-
field farming in France. Ann Occ Hyg. 53(1): 69-81
Leonas, K. K., Yu, X. K., & Hall, D. (1992). Deposition Patterns on Garments during Application of
Lawn and Garden Chemicals: A Comparison of Six Equipment Types, 234, 230–234.
Lloyd GA, Bell GJ. Hydraulic nozzles: Comparative Spray Drift study. Ministry of Agriculture, Fisheries and
Food (MAFF). United Kingdom. SC7704, 1988
Machera, K. (2003). Determination of Potential Dermal and Inhalation Operator Exposure to
Malathion in Greenhouses with the Whole Body Dosimetry Method. Annals of Occupational
Hygiene, 47(1), 61–70. doi:10.1093/annhyg/mef097
Marquart J, Lansink C, Engel R, van Hemmen J. 1999. Effectiveness of local exhaust ventilation
during dumping of powders from bags. TNO report v99.267, Zeist, The Netherlands
Marquart, J. (2003). Determinants of Dermal Exposure Relevant for Exposure Modelling in
Regulatory Risk Assessment. Annals of Occupational Hygiene, 47(8), 599–607.
doi:10.1093/annhyg/meg096
153

Mathers JJ, Glass CR, Gilbert AJ, Wild SA. Determination of operator and environmental
contamination with simulated pouring studies into an induction bowl. York: Central Science
Laboratory; 2000. Report nr FD 99/61.
Matuo, T., & Matuo, Y. K. (1998). Efficiency of Safety Measures Applied to a Manual Knapsack
Sprayer for Paraquat Application to Maize ( Zea mays L .), 701, 698–701.
Michielsen JMGP, van de Zande JC, Wenneker H, Stallinga H, Van Velde P. 2012.
External loading of an orchard sprayer with agrochemicals during application. Aspects of Applied
Biology. 114: 151-157
Nuyttens, D., Braekman, P., Windey, S., & Sonck, B. (2009). Potential dermal pesticide exposure
affected by greenhouse spray application technique. Pest management science, 65(7), 781–90.
doi:10.1002/ps.1755
Ramwell CT, Johnson PD, Boxall ABA, Rimmer DA. 2004. Pesticide residues on the external surfaces
of field-crop sprayers: environmental impact. Pest Management 60:795–802 (SciencePest Manag Sci
(online: 2004)
Ramwell CT, Johnson PD, Boxall ABA, Rimmer DA. 2005. Pesticide Residues on the External Surfaces
of Field Crop Sprayers: Occupational Exposure. Ann. Occup. Hyg., Vol. 49, No. 4, pp. 345–350
Rincón, V., Páez, F., & Sánchez-Hermosilla, J. (2009). Estimation of Leaf-Area Index in greenhouse
tomato crop to determine the volume rate to spray. cirg.ageng2012.org. Retrieved from
http://www.cirg.ageng2012.org/images/fotosg/tabla_137_C0402.pdf
Sánchez-Hermosilla, J., Rincón, V. J., Páez, F., Agüera, F., & Carvajal, F. (2011). Field evaluation of a
self-propelled sprayer and effects of the application rate on spray deposition and losses to the
ground in greenhouse tomato crops. Pest Management Science, 67(8), 942–947.
doi:10.1002/ps.2135
154

Sanjrani, W. (1990). Effect of application volume and method on spray operator contamination by
insecticide during cotton spraying, 9(October).
Schinkel J, Warren N, Fransman W, van Tongeren M, McDonnell P, Voogd E, Cherrie JW, Tischer M,
Kromhout H, Tielemans E. Calibration of the ART mechanistic model. J. Environ. Monit. 2011; 13:
1374–82.
Schneider T, Vermeulen R, Brouwer DH, Cherrie JW, Kromhout H, Fogh CL. Conceptual model for
assessment of dermal exposure. Occup Environ Med 1999;56:765–773
Smith, D., & Askew, S. (2000). Droplet size and leaf morphology effects on pesticide spray
deposition. Transactions of the …, 43(2), 255–259. Retrieved from
http://www.prairieswine.com/pdf/2987.pdf
Wild SA, Mathers JJ, Glass CR. 2000. The potential for operator hand contamination to pesticides
during the mixing and loading procedure. Aspects of Applied biology, 57: 179-183
Tielemans E, Schneider T, Goede H, Tischer M, Warren N, Kromhout H, van Tongeren M, van
Hemmen JJ, Cherrie JW. Conceptual model for assessment of inhalation exposure: defining
modifying factors. Ann. Occup. Hyg. 2008; 52 (7): 577-586.
Van de Zande JC. Inventarisatie externe verontreiniging spuitapparatuur. Plant Research International BV,
Wageningen. Nota 470. 2007.
Van Zyl, S. a., Brink, J.-C., Calitz, F. J., & Fourie, P. H. (2010). Effects of adjuvants on deposition efficiency of
fenhexamid sprays applied to Chardonnay grapevine foliage. Crop Protection, 29(8), 843–852.
doi:10.1016/j.cropro.2010.04.017
Uk, S. (1977). Tracing insecticide spray droplets by sizes on natural surfaces. The state of the art and its
value. Pesticide Science, 8(5), 501–509. doi:10.1002/ps.2780080512
155

United States Environmental Protection Agency (USEPA). Occupational and residential exposure test
guidelines. United States Environmental Protection Agency (US-EPA); 1996. Report nr OPPTS 875.1100.
United States Environmental Protection Agency (USEPA). Human Health Evaluation Manual. Part E:
Supplemental Guidance for Dermal Risk Assessment, RAG Vol. 1, 1999.
Veldhof RJG, Lurvink MWM, de Vreede SAF, Gijsbers JHJ, Tjoe Nij E, Brouwer DH.
2006. Dermal exposure to dust during manual transfer of powder; the effect of amount
handled and dustiness. TNO report V5816, Zeist, The Netherlands
Wicke, H., Ba, G., & Frie, R. (1999). Comparison of spray operator exposure during orchard spraying
with hand-held equipment fitted with standard and air injector nozzles, 18, 0–7
Zabkiewicz, J. a. (2007). Spray formulation efficacy—holistic and futuristic perspectives. Crop
Protection, 26(3), 312–319. doi:10.1016/j.cropro.2005.08.019
156
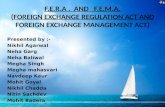
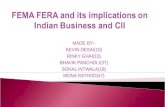


![FERA Final[1]Ggg](https://static.fdocuments.us/doc/165x107/577d235b1a28ab4e1e9995fc/fera-final1ggg.jpg)
![FERA Final[1]](https://static.fdocuments.us/doc/165x107/577d22871a28ab4e1e979ccd/fera-final1.jpg)












