Boston Schools Superintendent Johnson's Presentation To Boston School Committee
Upload
alvin-yuan-zhangCategory
view
430download
2
OPERATIONS RESEARCH PRESENTATION
OPERATIONS RESEARCH PRESENTATIONPRESENTATION
Al i Y ZhAlvin Yuan Zhang Center of Information and System Engineering
Boston University b t @b [email protected]
Yuan Zhang Boston University [email protected] OPERATIONS RESEARCH PRESENTATION

OPERATIONS RESEARCH PRESENTATION
OUTLINE
1 Project I: Sustainable Ecosystem (SE) Planning Based on Discrete Stochastic Dynamic Programming (DSDP) and Evolutionary Game Theory (EGT)
Project II: Research on the Locational‐Marginal‐Price (LMP) Based Distribution Power Network
2
Project III: Optimization Approach to Parametric Tuning of Power System Stabilizer (PSS) Based on Trajectory Sensitivity (TS) Analysis
3
Yuan Zhang Boston University [email protected] OPERATIONS RESEARCH PRESENTATION

OPERATIONS RESEARCH PRESENTATIONProject I: SE Planning Based on DSDP and EGT
Introduction
Why investigating SE Planning?Ecosystems have been faced with server threats under the impacts of climate and humankind togetherDifferent patterns of resource utilization could directly influenced ecosystem heathSustainability is an important target of developing nature ecosystem, i.e., SE
Difficulties Ecosystems are usually influenced by many factors which are difficult to define and quantifyResearch related to ecosystem is rather difficult due to its complex structures and metabolic processesDirection: To represent multi‐subsystems and their dynamic interactions in an analytical form using a reasonable number of equations and parameters!reasonable number of equations and parameters!
Drawbacks of Previous WorkFundamental weakness is that they use strictly deterministic and quantitative approaches to describe systems that are full of uncertainty and only qualitatively understoodthat are full of uncertainty and only qualitatively understood
Mainly focus on economically developed and densely populated areas, but neglected regions with adverse weather conditions, such as Loess Plateau
Merely focused on analysis of overall resource planning among multi‐subsystems, but ignore impacts of dynamic relationship among them, namely evolutionary game relations
Yuan Zhang Boston University [email protected] OPERATIONS RESEARCH PRESENTATION
Motivation: To explore some feasible applications of decision theory/method into SE planning, with a specific area of ecological resource planning, such as water resource planning problem!
p g , y y g

OPERATIONS RESEARCH PRESENTATIONProject I: SE Planning Based on DSDP and EGT
Brief Overview of Loess Plateau
Extensive region (530,000 km2 ‐ larger than Spain and almost as large as France)
Extreme loss of soil fertility and reduction in arability
Yuan Zhang Boston University [email protected] OPERATIONS RESEARCH PRESENTATION
Natural and human factors threat the sustainability of Loess Plateau, especially the shortage of water resource

OPERATIONS RESEARCH PRESENTATIONProject I: SE Planning Based on DSDP and EGT
Simplified DSDP Model for SE Planning
Definition 1: Resource and User
Define the total kinds of concerned resource as m,
Definition 2: Time Horizon
Define time horizon as k=1 2 N which represent,which is utilized by n user subsystems (or known asusers). These users can be regarded as residents,companies, governments, agriculture firms, etc.
Define time horizon as k=1, 2, …, N, which representthe period when each user begin to utilize theresource.
Definition 3: State Variable
Define state variable at time k as follows:
11 12 1( ) ( ) ( )x k x k x k
Definition 4: Decision Variable
Define decision variable at time k as follows:
( ) ( ) ( )u k u k u k
11 12 1
21 22 2
1 2
( ) ( ) ( )
( ) ( ) ( ), 1,...,
( ) ( ) ( )
n
nk
m m mn
x k x k x k
x k x k x kk N
x k x k x k
X
11 12 1
21 22 2
1 2
( ) ( ) ( )
( ) ( ) ( )( )
( ) ( ) ( )
n
nk k k
m m mn
u k u k u k
u k u k u k
u k u k u k
U U X
where xij(k) denotes as the case of whether the i‐thresource is used by the j‐th user. If xij(k)=1, the i‐thresource is assigned to the j‐th user; otherwise not.
1 2( ) ( ) ( )m m mn where uij(k) denotes as the amount of resource thatthe j‐th user decide to use from the i‐th one.
Yuan Zhang Boston University [email protected] OPERATIONS RESEARCH PRESENTATION

OPERATIONS RESEARCH PRESENTATIONProject I: SE Planning Based on DSDP and EGT
Simplified DSDP Model for SE Planning
111uDefine reward function at time interval [k, k+1] as
Definition 6: Reward Function
1
2
2
21u
12u
22u
uijC
ijS
[ , ]follows
V
11 12 1
21 22 2
( ) ( ) ( )
( ) ( ) ( )n
nk
r k r k r k
r k r k r k
2
3
13u
23u
where rij (k) can be express as
V
1 2( ) ( ) ( )
k
m m mnr k r k r k
Definition 5: Transition Probability Matrix
Define state variable at time as follows:h S d t th d f th j th th t
( ), ( ) 0( )
0, ( ) 0ij ij ij ij
ijij
S C u k x kr k
x k
1| 1
11 12 1
21 22 2
( | , )
( ) ( ) ( )
( ) ( ) ( )
k k k k k
l
l
p k p k p k
p k p k p k
X XP P X X U where Sij denote the reward of the j‐th user thatutilized the i‐th resource=; denote the cost Cijof thej‐th user that utilized per‐unit amount of the i‐thresource. Assume Sij =S~|j and Cij =Ci|~ .
Yuan Zhang Boston University [email protected] OPERATIONS RESEARCH PRESENTATION
1 2( ) ( ) ( )l l llu k u k p k

OPERATIONS RESEARCH PRESENTATIONProject I: SE Planning Based on DSDP and EGT
Simplified DSDP Model for SE Planning
Mathematically speaking, there are 2mxn kinds of
Remark 1
Based on Remark 2, P(Xk+1|Xk,Uk)=P(Xk+1|Xk, Uk),
Remark 3
y p g,possible selection of Xk. However, it is obviouslythat we can’t select every element of Xk as zero,which means there is no resource is assigned to anyuser. Assume that each resource will be assigned toarbitrary user; and each use can get at least one
, ( k+1| k, k) ( k+1| k, k),which is a stochastic matrix that can’t be easilyderived from analytical modeling. Referring C. C. Linet al*, we will use the statistic data of waterresource bulletin** to determine PXk+1|Xk. Using themaximum likehood estimator, PXk+1|Xk could be
kind of resources. Thus, each row and each columnof Xk will have at least an integer 1 for any k=1,2, …,N .
Moreover, a stationary Markov chain is used toh bl h h d
Xk 1|Xkestimated as the observation data as follows:
h h b f f h
ˆ ( ) , 1,...,ij
iji
Np k k N
N
generate the state variable Xk, which is assumed totake on a finite number of values
(1) (2) ( ) ( ){ , ,..., ,..., }i lk k k k k kX X X X X X
where Nij is the number of occurrences of thetransition from Xk(i) to Xk(j) at time k, and Ni is thetotal number of times that has occurred at time k.
Remark 2
For any xij(k)=0, uij=0; xij(k)=1, 0<uij≤max(uij). Then,Uk is dependent of Xkwith a similar matrix structure.W ill hi f i h f ll i di i
* C. C. Lin, et al, “A stochastic control strategy for hybrid electric vehicles,” Proceedings of the American Control Conference, vol. 5, pp. 4710–4715, 2004.
** http://www.sxmwr.gov.cn/gb-zxfw-news-3-dfnj-28873
Yuan Zhang Boston University [email protected] OPERATIONS RESEARCH PRESENTATION
We will use this fact in the following discussions.

OPERATIONS RESEARCH PRESENTATIONProject I: SE Planning Based on DSDP and EGT
Simplified DSDP Model for SE Planning
DSDP model (Using DP Algorithm)
X( )k kJX X X(1) (2) (3)0 0 1 0 0 1 0 1 0
, ,1 1 0 1 1 1 1 0 1k k k
X XU UX X
U U
P X
X
1| 1 11 1
1 1
max ( ) ( , ) ( )
max ( ) ( ) ( )
k kk k
k k
m n
ij k ki j
m n
ij ij k k
r k i j g
r k p k J
X X X(4) (5) (6)0 1 1 0 1 1 0 1 0, ,
1 0 0 1 0 1 1 1 1k k k
X X X(7) (8) (9)0 1 1 0 1 1 1 0 0, ,
1 1 0 1 1 1 0 1 1k k k
U UX X1 1k k
k k
j ji j
Water Resource Planning based on the Proposed DSDP Model
f d d i 2
X X X(10) (11) (12)1 0 1 1 0 1 1 1 0, ,
0 1 0 0 1 1 0 0 1k k k
X X X(13) (14) (15)1 1 1 1 1 0 1 1 1, ,
0 0 1 0 1 1 0 1 0k k k
surface water and ground water, i.e., m=2
Users subsystems can be classified as three parts: agricultural firms, industrial usage and daily usage, i.e., n=3
0 0 1 0 1 1 0 1 0
X X X(16) (17) (18)1 1 1 1 0 0 1 0 1, ,
0 1 1 1 1 1 1 1 0k k k
X X X(19) (20) (21)1 0 1 1 1 0 1 1 1, ,
1 1 1 1 0 1 1 0 0k k k
As indicated in 2011 Water Data Bulletin,
| |
33 4 1 ,
5j iS C
1 1 1 1 0 1 1 0 0k k k
X X X
X
(22) (23) (24)
(25)
1 1 1 1 1 0 1 1 1, , ,
1 0 1 1 1 1 1 1 0
1 1 1
k k k
Yuan Zhang Boston University [email protected] OPERATIONS RESEARCH PRESENTATION
X (25)
1 1 1k We list all the 25 possible cases of Xk as follows:

OPERATIONS RESEARCH PRESENTATIONProject I: SE Planning Based on DSDP and EGT
Simplified DSDP Model for SE Planning
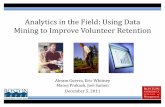
Transition probability matrix PXk+1|Xk as
k=9
*Optimal results of water planning of L.P.
0.8
0.2
0.4
0.6
1|
kk
+X
XP
1015
2025
0
510
15
20
0
( )iI( )jkX
I5
25( )ikX
I
Yuan Zhang Boston University [email protected] OPERATIONS RESEARCH PRESENTATION
* Yuan Zhang. “Sustainable Ecosystem Planning Based on Discrete Stochastic Dynamic Programming and Evolutionary Game Theory”, arXiv:1305.1990v2 [math.OC], May 2013.

OPERATIONS RESEARCH PRESENTATIONProject I: SE Planning Based on DSDP and EGT
Evolutionary Game Analysis of Water Resource Planning of L. P.
*Optimal results of water planning of L.P.(cont…)
Evolutionary game theory as a supplemen‐tation of the proposed SDP model
Two participants to do game playing in group A and BEach payoff equals to 1 or 0, and u, v, (u>1, v>1 ) denote as the payoff of A and B, under cooperation case, respectively
Two strategies in the decision games namely CTwo strategies in the decision games, namely, C(sustainable usage), D (unsustainable usage)
p as the ratio of participant who choose strategy C among group A; q as the ratio of choosing strategy D among group B.a o g g oup(p,q) can represent the evolutionary dynamics of the system, which can satisfies** :
/ (1 )( 1)
/ (1 )( 1)
dp dt p p uq
dq dt q q vp
*
/ (1 )( 1)dq dt q q vp
Yuan Zhang Boston University [email protected] OPERATIONS RESEARCH PRESENTATION
* Yuan Zhang. “Sustainable Ecosystem Planning Based on Discrete Stochastic Dynamic Programming and Evolutionary Game Theory”, arXiv:1305.1990v2 [math.OC], May 2013.
** D. Friedman, “Evolutionary games in economics,” Econometrica, vol. 6, no. 3, pp.637–660, 1991.

OPERATIONS RESEARCH PRESENTATIONProject I: SE Planning Based on DSDP and EGT
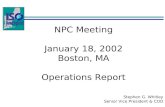
Evolutionary Game Analysis of Water Resource Planning of L. P.
*Evolutionary game theory as a supplementation of the proposed SDP model (Cont…)Two ESS points: Q1=(0,0) & Q4=(1,1)
Three unstable points: Q2=(0 1) Q3=(1 0) Q5=(1/v 1/u)Three unstable points: Q2 (0,1), Q3 (1,0), Q5 (1/v, 1/u)
4(1,1)Q2(0,1)Q
5Q
Increasing v & u
1(0, 0)Q 3(1, 0)Q
Yuan Zhang Boston University [email protected] OPERATIONS RESEARCH PRESENTATION
* Yuan Zhang. “Sustainable Ecosystem Planning Based on Discrete Stochastic Dynamic Programming and Evolutionary Game Theory”, arXiv:1305.1990v2 [math.OC], May 2013.

OPERATIONS RESEARCH PRESENTATIONProject I: SE Planning Based on DSDP and EGT
Conclusion
Conclusion
SE planning of the Loess Plateau area has been analyzed based on DSDP model and EGT
The concept of SE planning is introduced with specifications in ecological resource planning
Transition probability matrix is calculated in a statistic sense so as to derive the DSDP model
Although the approach is applied to the water resource planning of Loess Plateau as an example, the methodology of using DSDP and EGT is applicable to other complex systems
Further reading: Yuan Zhang ‐‐ http://arxiv.org/abs/1305.1990
Yuan Zhang Boston University [email protected] OPERATIONS RESEARCH PRESENTATION

OPERATIONS RESEARCH PRESENTATIONProject II: Research on LMP-Based Distribution Power Network
Background Introduction
Necessity of investigating LMP in distribution network
Integration of smart grid in the electricity networks allows for the expansion of the real time marginal cost g f g y p gbased pricing to the distribution network
Due to increasing demands of energy generation and consumption, standard network structures will not be sufficient to provide state‐of‐the‐art security of supply under increasing cost pressure
Power losses in the middle and cascading failures on customer side usually take place in distribution network g y pwith most of loads or electronics connected
Transaction of utilization and provision of real and reactive power by participants requires the improvement of pricing in distribution network
Overall goal of LMP‐based distribution network
Propose a redesigned market that could embrace the distribution level and extend the clearing prices accountingfor the marginal costs that occur in this level, i.e., LMP
Consider effects of power consumers/ producers on LMP, when connected at the low voltage level ff f p / p , g
Direction: Investigate distribution level LMP that are incorporating marginal costs of real and reactive power, transformer loss of life, and voltage control limits
Possibility: Propose certain novel optimization approach for distribution market clearing problem.
Yuan Zhang Boston University [email protected] OPERATIONS RESEARCH PRESENTATION

OPERATIONS RESEARCH PRESENTATIONProject II: Research on LMP-Based Distribution Power Network
Distribution network market clearing problem
2 2
2 2 2 2
0 ( ) ( )
sin(arccos( ))
( ) ( ) ( ) ( )
i i i
i i i
i i i i i
g g gb b b
d d db b b
e e e e e
P Q C
Q P A
C P Q C P
Objective function & constraints* Power Constraints of generator, d b d
, ,
, ,
,min i i i
i
b m b m
b m b m
g d dPb g b b b
b i i
f f
f f
P c u P
tM
2 2 2 2( ) ( ) ( ) ( ) ,
0,
0,
0,
i i i i i
i
e e e e eb b b b b i
ieb i i
i i
C P Q C P e
if e is standalone
P if e is associated withd
if e is associated withg
distributed loads and electronic devices
Cost of real power production of the slack bus minus real power consumption
Cost of transformer loss of life
,
, (1)
2 2, (1)
21
b m
M
M
Pb
Pb
V
P
C C Q
c V
,
,
i i i
i i i
g e db b b b
i i i
g e db b b b
P P P P b
Q Q Q Q b
Overallreal and reactive balance at
Cost of real power procured at substation
Opportunity cost compensation generator of reactive power at the substation
Cost of required voltage increase at the
2, , , ,
. .
cos( ) sin( ), ( , )b m b b m b m b m b m b m b m b m
s t
P V G VV G A A VV B A A b m ,
,
,
2
1500 1500exp ,
383 273b m
b m
f b mHf
H A
f
i i i each bus
Transformer
Cost of required voltage increase at the substation for voltage control
, , , ,
2, , , ,
,
,
cos( ) sin( ), ( , )
,
,
b m b b m b m b m b m b m b m b m
b m b m n b m b m b m b m b m b m
b b mm
b b m
Q V B VV B A A VV G A A m n
P P b
Q Q b
, , , ,
21, 2, , 3, , ,
2 2, , ,
,
, ( , )
b m b m b m b m
H Af f f b m f b m b m
b m b m b m
k k S k S f
S P Q b m
V V V b
loss of life
l l d f l
Real /Reactive power flow on any line and its injections at any bus
Yuan Zhang Boston University [email protected] OPERATIONS RESEARCH PRESENTATION
m ,
0b b bV V V b
A
Voltage limitation & default angle value for slack bus
at any bus
* E. Ntakou, M. C. Caramanis, “Price Discovery in Dynamic Power Markets with Low-Voltage Distriution-Network Participants,” Manuscript , Mar. 2013.

OPERATIONS RESEARCH PRESENTATIONProject II: Research on LMP-Based Distribution Power Network
Distribution network market clearing problem
Objective function & constraints (cont…)
Nonlinear objective function under constraint of a non‐convex setj
Using KKT condition to obtain the dual variable , which denotes as LMP of real and reactive power at each bus in the distribution network
,P Qb b
M t QP Q ,
, ,
, , (, (1) , (1)1)
2 2, (1)
2 1m n Mm n M
m n m
M
n M
f b b m
b b
f bP P
b b
P Vb m
f mf b b
M t Qc V
C
P Q V VP P PQ P P
, , , (, (1) , (1)1) 2 1m n Mm n M Mf b b mf bQ P P VM t Q
c VP Q V V
, ,
2 2, (1)
2 1m n m n M
b b b bb m
f mf b b
c VCQ Q QQ Q Q
h d t i l l ffi i t f l/ ti, (1) , (1) , (1) , (1)M M M Mb b b bP Q P Q where denote as marginal loss coefficients of real/reactive power;, ( ) , ( ) , ( ) , ( ), , ,M M M Mb b b b
b b b bP P Q Q
denote as marginal cost of transformer loss of life; denote asmarginal, ,,m n m nf f
b bP Q
,m m
b b
V VQ P
Yuan Zhang Boston University [email protected] OPERATIONS RESEARCH PRESENTATION
cost of voltage control that increases voltage at each bus as well as meets constraints in the problem.

OPERATIONS RESEARCH PRESENTATIONProject II: Research on LMP-Based Distribution Power Network
Distribution network market clearing problem
Objective function & constraints (cont…)
Using Matlab to do power flow calculation and then solve the aformentioned LMP in distribution networkUsing Matlab to do power flow calculation and then solve the aformentioned LMP in distribution network
Analyzing LMP based on some numerical results obtained from a give distribution level network
Related considerations of LMP in distribution network
Uniqueness of the solution: Radial power network (YES, unique); Meshed power network (NO, may be multiple…)Uniqueness of the solution: Radial power network (YES, unique); Meshed power network (NO, may be multiple…)
Multi‐period consideration: Evolution of LMP varied with Time & Space
Simplification approach: Linearization…
Yuan Zhang Boston University [email protected] OPERATIONS RESEARCH PRESENTATION

OPERATIONS RESEARCH PRESENTATIONProject II: Research on LMP-Based Distribution Power Network
Convex Relaxation: An Interesting Idea for Solving Market Clearing Problem
Conexify*L. W. Gan, et al., proposed a convex relaxation method for optimal power flow in tree networks**
optx
( )f x
This form can then be transformed into Second‐Order‐Cone constraint
Yuan Zhang Boston University [email protected] OPERATIONS RESEARCH PRESENTATION
* Oral communication with Prof. M. C. Caramanis.** L. W. Gan, N. Li, U. Topcu, S. Low, “On the exactness of convex relaxation for optimal power flow in tree networks,” IEEE 51st Conference on Decision and Control, Dec.
2012 Caramanis.

OPERATIONS RESEARCH PRESENTATIONProject II: Research on LMP-Based Distribution Power Network
Reference
M. C. Caramanis, et al., “Provision of Regulation Service Reserves by Flexible Distributed Loads,” IEEE 51st AnnualConference on Decision and Control, Dec. 2012.
M T Wishart et al “Smart demand‐sided management of LV distribution networks using multi‐objectiveM. T. Wishart, et al, Smart demand sided management of LV distribution networks using multi objectivedecision making,”Manuscript for IEEE PES Transactions on Smart Grid.
M. C. Caramanis, “It is time for power market reform to allow for retail customer participation and distribution
network marginal pricing ” IEEE Smart Grid Mar 2012network marginal pricing, IEEE Smart Grid, Mar. 2012.
S. M. M. Agah, H. A. Abyaneh, “Distribution transformer loss‐of‐life reduction by increasing penetration ofdistributed generation,” IEEE Transaction on Power Delivery, Apr. 2011.
M. C. Caramanis, R. E. Bohn and F. C. Schweppe, “Optimal spot pricing: price and theory,” IEEE Transactions onPAS, vol. 101, 1982.
C. Y. Lee, H. C. Chang, H. C. Chen, “A method for estimating transformer temperatures and elapsed livesconsidering operation loads”,WSEAS Transactions On Systems, Issue 11, vol. 7, pp.1349‐1358, Nov. 2008.considering operation loads ,WSEAS Transactions On Systems, Issue 11, vol. 7, pp.1349 1358, Nov. 2008.
M. Thomson, D. G. Infield, “Network power flow analysis for a high penetration of distributed generation,” IEEETransactions and Power Systems, vol. 22, no. 3, pp. 1157‐1162, Aug. 2007.
E Nt k M C C i “P i Di i D i P M k t ith L V lt Di t i ti N t k
Yuan Zhang Boston University [email protected] OPERATIONS RESEARCH PRESENTATION
E. Ntakou, M. C. Caramanis, “Price Discovery in Dynamic Power Markets with Low‐Voltage Distriution‐NetworkParticipants,”Manuscript for IEEE Conference on decision and Control, Mar. 2013.

OPERATIONS RESEARCH PRESENTATIONProject III: Optimization Approach to Parametric Tuning of PS Based on TS
Research Background of Optimal PSS Parametric Tuning
Why Introducing PSS?Grid interconnection of P.S. lead to oscillation that inhibits its long‐term stabilityPSS is introduced as a feedback controller to decrease oscillations, and increase the reliabilityOptimal PSS parametric tuning is crucial to P.S., and become a focal point of much on‐going research
Drawbacks of Previous WorkMerely focused on local equilibrium point/orbit, i.e., small disturbance ‐based P.S. is essentially a hard (nonlinear and nonsmooth) dynamic system undergoing large disturbance (LD) Traditional PSS optimization methods fail to obtain globally optimal parameter setTraditional PSS optimization methods fail to obtain globally optimal parameter setMotivation: A LD‐based Optimal PSS parameter tuning approach should be explored!
DifficultiesDifficulties Discontinuous change of P.S. structural dynamics under LD Hybrid Power System (HPS): A mix of continuous‐time, discrete‐time and discrete‐event dynamicsTS analysis can focus around transient flow trajectoryDirection: Exploring from LD based optimization approach to evaluate TS under constraints of HPS model!
Yuan Zhang Boston University [email protected] OPERATIONS RESEARCH PRESENTATION
Direction: Exploring from LD‐based optimization approach to evaluate TS under constraints of HPS model!

OPERATIONS RESEARCH PRESENTATIONProject III: Optimization Approach to Parametric Tuning of PS Based on TS
Modeling of PSS and HPS
Major parameter set of PSS
1 2 3 4( , , , , )sK T T T Tl
TS information will be obtained from Is iV ω
Definition 1: Switching Event
Switching event SE(i) is defined as any event thatd l h h f l bcan directly trigger the change of algebraic states y
at the i‐th period, which can then form a switchingevent set ASE, with its index set denoted as ISE.
Definition 2: Reset Event
Reset event RE(j) is defined as any event that candirectly trigger the change of discrete states z at thej‐th period which can then form a reset event set
Yuan Zhang Boston University [email protected] OPERATIONS RESEARCH PRESENTATION
j th period, which can then form a reset event setARE, with its index set denoted as IRE.

OPERATIONS RESEARCH PRESENTATIONProject III: Optimization Approach to Parametric Tuning of PS Based on TS
Modeling of PSS and HPS (Cont…)
* Compact HPS model of parameter‐dependent differential‐algebraic‐discrete (DAD)
[ , , ] n m pc
x x z l ( , )x f x y
: n l p m n f
: n l p m m g
: ( )j n l p m l h
(0)
( ) ( )
( ) ( )
( , )
( , ), ;
( , ), ; SE
i iSE
Ai iSE
SE Ai I
SE A
0 g x y
g x y0
g x y
* Ian A. Hiskens and M. A. Pai. “Trajectory Sensitivity Analysis of Hybrid Systems” IEEE Trans. Power Sys. 47 (2), 2000. NOT GENERAL!
pl
Incorporating parameters λ into the state x
( ) ( )
( )
( , ), ;
, ;RE
RE
j jRE A
jRE A
RE A j I
RE A j I
z h x y
z 0
Ian A. Hiskens and M. A. Pai. Trajectory Sensitivity Analysis of Hybrid Systems IEEE Trans. Power Sys. 47 (2), 2000. NOT GENERAL!
Mapping SE(i) and RE(j) into two triggering hypersurfaces H(i)(x,y) and S(j)(x,y)
( )x f x y ( ) ( )t tx xy(0)
( ) ( )
( ) ( )
( , )
( , )
( , ), ( , ) 0;{1,2}
( ) ( ) 0;
i i
i i
Hi
H
x f x y
0 g x y
g x y x y0
g x y x y
( ) ( , )ot t xx xy
( ) ( , )ot t yy xy
0 0( ) ( , )o ot t xx x xy
Trajectory Flow
Yuan Zhang Boston University [email protected] OPERATIONS RESEARCH PRESENTATION
( ) ( )
( )
( , ), ( , ) 0;
, ( , ) 0;RE
jA
H
S j I
g x y x y
z 0 x y0( , ( , )) ( , )o o o ot y0 g x x g x yy
0l
Initial Condition

OPERATIONS RESEARCH PRESENTATIONProject III: Optimization Approach to Parametric Tuning of PS Based on TS
Optimal PSS Parametric Tuning Based on TS
n l p m+ + +2min ( , )
fK t
f iJ t dtx
Objective Function TS Analysis for HPS
1 1( ( ), ( ))J Jt tx y
p
x
y 0 0( , )x y
0Dx1( )Jt
+Dxt
2 2( ( ), ( ))J Jt tx y
2( )Jt+Dx
01
(0)
( ) ( )
. . ( , )
( , )
( ) ( ) 0;
f iti
i i
s t
H
x f x y
0 g x y
g x y x y
l
0 0t
(1)( , ) 0H =x y
1Jt
1Jt
1Jt 2Jt
2Jt
(2)( , ) 0H =x y
2Jt
(1)SE (2)SE
( ) ( )
( ) ( )
( )
( , ), ( , ) 0;{1,2}
( , ), ( , ) 0;
, ( , ) 0;
( )RE
i i
jA
Hi
H
S j I
t
g x y x y0
g x y x y
z 0 x yTS (red parts)
0
0
( )
( )
, {1,2,..., }
o
o
i i i
t
t
i K
x xy y
l l l
0
0
0
0
( )
)) (
( )
(
tt
t t
x
x
x
y
x x
y x
TS dynamics equations
1 2 1 2{ , , , }, { , , }k i si i iK T T l l l l lK is the number of generators
Gradient information can be obtained as
TS dynamics equations
0 0
0 0
0
(1 ) (1 )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
d d t t t t
t t t t
x x y x
x x y x
x / x f x f y
0 g x g y
( ) ( ) ( ) ( )d d / f f
1 2[ , ]J Jt t t
Yuan Zhang Boston University [email protected] OPERATIONS RESEARCH PRESENTATION
1
( , ) 2 ( )f
o
t
i
K
f it i
J t t
x ll
0 0
0 0
0
(2 ) (2 )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
d d t t t t
t t t t
x x y x
x x y x
x / x f x f y
0 g x g y2[ , ]J ft t t

OPERATIONS RESEARCH PRESENTATIONProject III: Optimization Approach to Parametric Tuning of PS Based on TS
Optimal PSS Parametric Tuning Based on TS
TS Analysis for HPS (Cont…)
Refer Ian A. Hiskens et al, jump conditions for th iti it ft th t t i i t
1 1( ( ), ( ))J Jt tx y
n l p m+ + +
x
y 0 0( , )x y2 2( ( ), ( ))J Jt tx y
the sensitivity after the event triggering tJ1:
0 0 0
0 0 1
1 1 1
(1 ) 1 (1 )1
( ) ( ) ( )
( ) [ ( ) ]|J
J J J
J t
t t t
t
x x x
x y x x
x x f f
y g g x
0 0t
(1)( , ) 0H =x y
0Dx
1Jt
1Jt
1Jt
1( )Jt+Dx
t
2Jt
2Jt
(2)( , ) 0H =x y
2Jt
2( )Jt+Dx
(1)SE (2)SE
Updating the jump condition for the sensitivity after the event triggering tJ2:
0 0 02 2 2( ) ( ) ( )J J Jt t t x x xx x f fSE SE0 0 0
0 0 2
(2 ) 1 (2 )2( ) [ ( ) ]|
JJ tt x y x xy g g x
Optimum searching using Conjugate Gradient Method (CGM)p g g j g ( )
1
1 1 1
, 0
( )k k k k k
k k k kJ
dd dl
l ll
Powell‐Fletcher‐Reeves Rule
( ) ( ) ( )
[0 1] [0 1]kk k m k k k kJ J s s J
d dll l l
Armijo Rule
Yuan Zhang Boston University [email protected] OPERATIONS RESEARCH PRESENTATION
1 1
1
( ) ( ) ( ), 1,..., 1
( ) ( )k k k
kk k
J J Jk n
J J
l l l
l l
l l ll l
[0,1], [0,1]

OPERATIONS RESEARCH PRESENTATIONProject III: Optimization Approach to Parametric Tuning of PS Based on TS
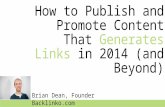
Application to IEEE Standard Test System
IEEE three‐machine‐nine‐bus standard test system
2G 3G7 8 9
1
25
4
63
1G
1
Yuan Zhang Boston University [email protected] OPERATIONS RESEARCH PRESENTATION
* Yuan Zhang. “Optimization Approach to Parametric Tuning of Power System Stabilizer Based on Trajectory Sensitivity Analysis”, arXiv:1305.0978v2 [cs.SY] , May 2013

OPERATIONS RESEARCH PRESENTATIONProject III: Optimization Approach to Parametric Tuning of PS Based on TS
Conclusion
Conclusion
Optimal PSS parametric tuning method is studied from the viewpoint of TS, both theoretically and numerically
Discontinuity is a major obstacle to analyze the constraints of this optimization problem
Gradient information of the objective function is obtained from TS of state variables w.r.t. PSS parameters
Objective function considers the transient features under large disturbances, which indicates that the proposed method can effectively damp the spontaneous oscillation caused by large disturbance
Further reading: Yuan Zhang ‐‐ http://arxiv.org/abs/1305.0978
Yuan Zhang Boston University [email protected] OPERATIONS RESEARCH PRESENTATION

OPERATIONS RESEARCH PRESENTATION
Thank You!Thank You!Q & A
Yuan Zhang Boston University [email protected] OPERATIONS RESEARCH PRESENTATION