
Bayesian hierarchical modeling of simply connected 2D...
30
Bayesian hierarchical modeling of simply connected 2D shapes Kelvin Gu, Debdeep Pati and David B. Dunson Department of Statistical Science, Duke University, NC 27708 email: [email protected], [email protected], [email protected] February 6, 2012 Abstract Models for distributions of shapes contained within images can be widely used in biomedical applications ranging from tumor segmentation for targeted radiation therapy to classifying cells in a blood sample. Our focus is on hierarchical probability models of shape and size, described using 2D closed curves. Prevalent methods for analyzing a population of shapes assume that each shape is already well defined by a set of landmarks or a function specifying its boundary. However, in many applications there is substantial uncertainty in the boundary due to noise or occlusion, and this is typically not accounted for during analysis. We develop a Bayesian hierarchical model which not only characterizes a population of closed curvecs, but also uses this inferred population-level knowledge to better estimate the boundary of each shape in situations with high uncertainty or missing data. Our model is based on multiscale deformation of closed curves, and is shown to be highly flexible in representing 2D shapes. Efficient Markov chain Monte Carlo methods are developed, evaluated through simulation examples and applied to a brain tumor contour detection problem. Keywords: Biomedical imaging, closed curves, cyclic basis, deformation, functional data, hierarchical modeling, multiscale, shape analysis 1
Transcript of Bayesian hierarchical modeling of simply connected 2D...

Bayesian hierarchical modeling of simply connected 2D shapes
Kelvin Gu, Debdeep Pati and David B. Dunson
Department of Statistical Science,
Duke University, NC 27708
email: [email protected], [email protected], [email protected]
February 6, 2012
Abstract
Models for distributions of shapes contained within images can be widely used in biomedical applications
ranging from tumor segmentation for targeted radiation therapy to classifying cells in a blood sample. Our
focus is on hierarchical probability models of shape and size, described using 2D closed curves. Prevalent
methods for analyzing a population of shapes assume that each shape is already well defined by a set
of landmarks or a function specifying its boundary. However, in many applications there is substantial
uncertainty in the boundary due to noise or occlusion, and this is typically not accounted for during analysis.
We develop a Bayesian hierarchical model which not only characterizes a population of closed curvecs, but
also uses this inferred population-level knowledge to better estimate the boundary of each shape in situations
with high uncertainty or missing data. Our model is based on multiscale deformation of closed curves, and
is shown to be highly flexible in representing 2D shapes. E�cient Markov chain Monte Carlo methods are
developed, evaluated through simulation examples and applied to a brain tumor contour detection problem.
Keywords: Biomedical imaging, closed curves, cyclic basis, deformation, functional data, hierarchical
modeling, multiscale, shape analysis
1
1. INTRODUCTION
Collections of shapes are widely studied across many disciplines, such as biomedical imaging, cytology and
computer vision. Perhaps the most fundamental issue when studying shape is the choice of representation.
The simplest representations for shape are basic geometric objects, such as ellipses (Cinquin, Chalmond and
Berard 1982; Amenta, Bern and Kamvysselis 1998; Rossi and Willsky 2003), polygons (Malladi, Sethian and
Vemuri 1994; Malladi, Sethian and Vemuri 1995; Sederberg, Gao, Wang and Mu 1993; Sato, Wheeler and
Ikeuchi 1997), and slightly more involved specifications such as superellipsoids (Gong, Pathak, Haynor, Cho
and Kim 2004).
Clearly, not all shapes can be adequately characterized by simple geometric objects. The landmark-
based approach was developed to describe more complex shapes by reducing them to a finite set of landmark
coordinates. This is appealing because the joint distribution of these landmarks is tractable to analyze, and
because landmarks make registration/alignment of di↵erent shapes straightforward. There is a very rich
statistical literature on parametric joint distributions for multiple landmarks (Bookstein 1986; Bookstein
1996c; Bookstein 1996b; Bookstein 1996a; Dryden and Mardia 1998; Dryden and Mardia 1993; Mardia and
Dryden 1989; Dryden and Gattone 2001; Zheng, John, Liao, Boese, Kirschstein, Georgescu, Zhou, Kempfert,
Walther, Brockmann et al. 2010), with some recent work on nonparametric distributions, both frequentist
(Kume, Dryden and Le 2007; Kent, Mardia, Morris and Aykroyd 2001; Bhattacharya 2008; Bhattacharya
and Bhattacharya 2009) and Bayesian (Bhattacharya and Dunson 2011b; Bhattacharya and Dunson 2010;
Bhattacharya and Dunson 2011a).
Unfortunately, in many applications it is not possible to define landmarks if the target collection of
objects vary greatly. Furthermore, even if landmarks can be chosen, there may be substantial uncertainty
in estimating their location, which is not accounted for in most landmark-based statistical analyses.
In these situations, one can instead characterize shapes by describing their boundary, using a nonpara-
metric curve (2D) or surface (3D). Curves and surfaces are widely used in biomedical imaging and commercial
computer-aided design (Barnhill 1985; Lang and Roschel 1992; Hagen and Santarelli 1992; Aziz, Bata and
Bhat 2002), because they provide a flexible model for a broad range of objects (cells, pollen grains, protein
molecules, machine parts, etc.).
A collection of introductory work on curve and surface modeling can be found in Su and Liu (1989)
and subsequent developments in Muller (2005). Popular representations include: Bezier curves, splines, and
principal curves (Hastie and Stuetzle 1989) (a nonlinear generalization of principal components, involving
smooth curves which ‘pass through the middle’ of a data cloud). Kurtek, Srivastava, Klassen and Ding
(2011) and Su, Dryden, Klassen, Le and Srivastava (2011) dealt with curve modeling based on smooth
stochastic processes. Although there is a vast literature on estimating curves and surfaces, most of the focus
2
is on estimating unrestricted functions. Estimating a closed surface or curve involves a di↵erent modeling
strategy and there has been little work in this regime, particularly from a Bayesian point of view. To our
knowledge, only Pati and Dunson (2011) developed a Bayesian approach for fitting a closed surface, using
tensor-products.
Many of the above curve representations can successfully fit and describe complex shape boundaries,
but they often have high or infinite dimensionality, and it is not clear how to directly analyze them. Also,
they were not designed to facilitate comparison between shapes or characterize a collection of shapes. One
solution is to re-express each curve using Fourier or wavelet descriptors (Whitney 1937; Zahn and Roskies
1972; Mortenson 1985; Persoon and Fu 1977). These approaches decompose a curve into components of
di↵erent scales, so that the coarsest scale components carry the global approximation information while the
finer scale components contain the local detailed information. Such multiscale transforms make it easier to
compare objects that share the same coarse shape, but di↵er on finer details, or vice versa. The finer scale
components can also be discarded to yield a finite and low-dimensional representation. Other dimensionality-
reducing transformations include principal component analysis and distance weighted discrimination. After
some type of multiscale or dimension-reducing transform, one can finally analyze the population of shapes
via existing tools for clustering, classification, regression etc.
Note that the entire process is fragmented into three separate tasks: 1) curve fitting, 2) transformation,
3) population-level analysis. This can be problematic for several reasons. First, curve-fitting is not always
accurate. If uncertainty is not accounted for, mistakes made during curve-fitting will be propagated into later
analyses. This is not acceptable in sensitive applications such as brain tumor tracing. Second, dimension-
reducing transformations may throw away some of the information captured by curve-fitting. Third, one
suspects that the curve-fitting and transformation steps should be able to benefit from higher-level observa-
tions made during subsequent population analysis. For example, if the curve-fitting procedure is struggling
to fit a missing or noisy shape boundary, it should be able to draw on similar shapes in the population to
achieve a more informed fit. In this paper, we propose a Bayesian hierarchical model for 2D shapes, which
addresses all of the aforementioned problems by performing curve fitting, multiscale transformation, and
population analysis simultaneously within a single joint model.
The key innovation in our shape model is a shape-generating random process which can produce the whole
range of simply-connected 2D shapes (shapes which contain no holes), by applying a sequence of multiscale
deformations to a novel type of closed curve based on the work of Roth, Juhasz, Schicho and Ho↵mann
(2009). Mokhtarian and Mackworth (1992), Desideri and Janka (2004) and Desideri, Abou El Majd and
Janka (2007) also proposed multiscale curves (with the latter two being more similar to our work, in their
usage of Bezier curves and degree-elevation). However, none of these developed a statistical model around
3

their representation. They also only considered single curves, rather than a collection of shapes. In analyzing
a population of shapes, a notion of average shape or mean shape is important. Dryden and Mardia (1998)
discussed notions of mean shape, shape variability and various methods of estimating them in the context
of landmark-based analysis. We will define similar notions of ‘central shape’ and shape variability in terms
of the basis coe�cients of our proposed model.
In §2, we describe the shape-generating random process, how it specifies a multiscale probability distri-
bution over shapes, and how this can be used to express various modeling assumptions, such as symmetry.
In §3, we provide theory regarding the flexibility of our model (support of the prior). In §4 and §5, we
show how the random process can be used to fit a curve to a point cloud or an image. In §6, we show how
to simultaneously fit and characterize a collection of shapes. In §7, we describe the computational details
of Bayesian inference behind each of the tasks described earlier. We use a fast Markov chain Monte Carlo
algorithm which is scalable to a huge collection of shapes having a dense point cloud each. Finally, in §8 and
§9, we test our model on simulated shapes and apply our approach to brain tumor imaging.
En route, we solve several important sub-problems that may be generally useful in the study of curve
and surface fitting. First, we develop a model-based approach for parameterizing point cloud data. Second,
we show how fully Bayesian joint modeling can be used to incorporate several pieces of auxiliary information
in the process of curve-fitting, such as when a surface orientation is reported for each point within a point
cloud. Lastly, the concept of multi-scale deformation can be generalized to 3D surfaces in a straightforward
manner.
2. SHAPE-GENERATING RANDOM PROCESS
2.1 Overview
Our shape-generating random process starts with a closed curve and performs a sequence of multiscale
deformations to generate a final shape. In §2.2, we introduce the Roth curve developed by Roth et al.
(2009), which is used to represent the shape boundary. Then, in §2.3, we demonstrate how to deform a
Roth curve at multiple scales to produce any simply-connected shape. Using the mechanisms developed
in §2.2 and §2.3, we present the full random process in §2.5. In §4, we use this as a prior distribution for
curve-fitting.
2.2 Roth curve
A Roth curve is a closed parametric curve, C : [�⇡,⇡] ! R2, defined by a set of 2n + 1 points in R2,
{cj , j = 1, . . . , 2n+1} (also known as control points), where n is the degree of the curve and we may choose
it to be any positive integer. For convenience, we will refer to the total number of control points as J , where
4

J(n) = 2n + 1. For notational simplicity, we will drop the dependence of n in J(n). As a function of t,
the curve can be viewed as the trajectory of a particle over time. At every time t, the particle’s location
is defined as some convex combination of all control points. The weight accorded to each control point in
this convex combination varies with time according to a set of basis functions, {Bnj (t), j = 1, . . . , J}, where
Bnj (t) > 0 and
PJj=1 B
nj (t) = 1 for all t.
C(t) =JX
j=1
cjBnj (t), t 2 [�⇡,⇡] , (1)
Bnj (t) =
hn
2n
⇢
1 + cos
✓
t+2⇡(j � 1)
2n+ 1
◆�n
, hn =(2nn!)2
(2n+ 1)!, (2)
where cj = [cj,x cj,y]0 specifies the location of the jth control point and Bnj : [�⇡,⇡] ! [0, 1] is the jth basis
function. For simplicity, we omit the superscript n denoting a basis function’s degree, unless it requires
special attention. This representation is a type of Bezier curve. The Roth curve has several appealing
properties:
1. It is fully defined by a finite set of control points, despite being an infinite dimensional curve.
2. It is always closed, i.e. C(�⇡) = C(⇡). This is necessary to represent the boundary of a shape.
3. All basis functions are nonlinear translates of each other, and are evenly spaced over the interval
[�⇡,⇡]. They can be cyclically permuted without altering the curve. This implies that each control
point exerts the same ‘influence’ over the curve.
4. A degree 1 Roth curve having 3 control points is always a circle or ellipse.
5. Any closed curve can be approximated arbitrarily well by a Roth curve, for some large degree n. This
is because the Roth basis, for a given n, spans the vector space of trigonometric polynomials of degree
n and as n ! 1, the basis functions span the vector space of Fourier series. We elaborate on this in
§3.
6. Roth curves are infinitely di↵erentiable (C1).
2.3 Deforming a Roth curve
A Roth curve can be deformed simply by translating some of its control points. We now formally define
deformation and illustrate it in Figure 1.
Definition Suppose we are given two Roth curves,
C(t) =JX
j=1
cjBj(t), eC(t) =JX
j=1
ecjBj(t), (3)
5

Figure 1: Deformation of a Roth curve
where for each j, ecj = cj + Rjdj , dj 2 R2 and Rj is a rotation matrix. Then, we say that C(t) is deformed
into eC(t) by the deformation vectors {dj , j = 1, . . . , J}.
Each Rj orients the deformation vector dj relative to the original curve’s surface. As a result, positive
values for the y-component of dj always correspond to outward deformation, negative values always corre-
spond to inward deformation, and dj ’s x-component corresponds to deformation parallel to the surface. We
will call Rj a deformation-orienting matrix. In precise terms,
Rj =
2
4
cos(✓j) � sin(✓j)
sin(✓j) cos(✓j)
3
5 , (4)
where ✓j is the angle of the curve’s tangent line at qj = �2⇡(j�1)2n+1 , the point where the control point cj has
the strongest influence: qj = arg maxt2[�⇡,⇡]
Bj(t). ✓j can be obtained by computing the first-derivative of the
Roth curve, also known as its hodograph.
Definition The hodograph of a Roth curve is given by:
H(t) =JX
j=1
cjd
dtBj(t), (5)
d
dtBj(t) = �
2
(2n+ 1)�2nn
�
JX
j=1
cj
n�1X
k=0
✓
2n
k
◆
(n� k) sin
✓
(n� k)t+2(n� k)(j � 1)⇡
2n+ 1
◆
, (6)
where t 2 [�⇡,⇡]. If we view C(t) as the trajectory of a particle, H(t) intuitively gives the velocity of the
particle at point t.
6

We can use simple trigonometry to determine that
✓j = arctan
✓
Hy(qj)
Hx(qj)
◆
. (7)
Note that Rj is ultimately just a function of {cj 2 R2, j = 1, . . . , J}.
Next, we show how to alter the scale of deformation, using an important concept called degree elevation.
Definition Given any Roth curve, we can use degree elevation to re-express the same curve using a larger
number of control points (a higher degree). More precisely, if we are given a curve of degree n, C(t) =P2n+1
j=1 cjBnj (t), we can elevate its degree by any positive integer v, to obtain a new degree elevated curve:
bC(t) =P2(n+v)+1
j=1 bcjBn+vj (t) such that C(t) = bC(t) for all t 2 [�⇡,⇡]. In bC(t), each new degree-elevated
control point, bcj , can be defined in terms of the original control points, {ci, i = 1, . . . , 2n+ 1}:
bcj :=1
2n+ 1
2n+1X
i=1
ci +
�2(n+v)n+v
�
hn
22n�1
n�1X
k=0
�2nk
�
�2(n+v)v+k
�
2n+1X
i=1
cos
✓
(n� k)
✓
�2(j � 1)⇡
2(n+ v) + 1
◆
+2(n� k)(i� 1)⇡
2n+ 1
◆
ci.
Although daunting to read, the only crucial points to note about this relationship are that bcj is linear in
ci’s, i = 1, . . . , 2n + 1 and that the ‘influence’ of a single control point shrinks after degree elevation. This
is because the curve is now shared by a greater total number of control points. This implies that after
degree-elevation, the translation of any single control point will cause a smaller, finer-scale deformation to
the curve’s shape. Thus, degree elevation can be used to adjust the scale of deformation. We exploit this
strategy in the random shape process proposed in §2.5.
To that end, we first rewrite all of the concepts described above in more compact vector notation. Note
that the formulas for degree elevation, deformation, the hodograph and the curve itself all simply involve
linear operations on the control points.
2.4 Vector notation
Rewrite the control points in a ‘stacked’ vector of length 2J ,
c = (c1,x, c1,y, c2,x, c2,y, . . . , cJ,x, cJ,y)0. (8)
The formula for a Roth curve given in (1) can be rewritten as
C(t) = X(t)c (9)
X(t) =
2
4
B1(t) 0 B2(t) 0 · · · BJ(t) 0
0 B1(t) 0 B2(t) · · · 0 BJ(t)
3
5 . (10)
The formula for the hodograph given in (5) is rewritten as
H(t) = ˙X(t)c, X(t) =d
dtX(t). (11)
7

Deformation can be written as
ec = c+ T (c)d, d = (d1,x, d1,y, d2,x, d2,y, . . . , dJ,x, dJ,y)0, T (c) = block(R1, R2, . . . , RJ), (12)
where block(A1, . . . , Aq) is a pq ⇥ pq block diagonal matrix using p⇥ p matrices Ai, i = 1, . . . , q. We call T
the stacked deformation-orientating matrix. Note that T is a function of c, because each Rj depends on c.
Degree elevation can be written as the linear operator, E:
bc = Ec, E = (Ei,j)n+v,ni=1,j=1.
where
Ei,j =1
2n+ 1+
�2(n+v)n+v
�
hn
22n�1
n�1X
k=0
�2nk
�
�2(n+v)v+k
�
cos
(n� k)
⇢
�2(i� 1)⇡
2(n+ v) + 1
�
+2(n� k)(j � 1)⇡
2n+ 1
�
.
We will maintain this vector notation throughout the rest of the paper.
2.5 Random Shape Process
The random shape process starts with some initial Roth curve, specified by an initial set of control points,
c(0). From here on, we will refer to all curves by the stacked vector of their control points, c. Then, drawing on
the deformation and degree-elevation operations defined earlier, we repeatedly apply the following recursive
operation R times:
bc(r�1) = Erc(r�1), d(r) ⇠ N(µr,⌃r), c(r) = bc(r�1) + Tr(c
(r�1))d(r) (13)
resulting in a final curve c(R). In other words, (i) degree elevate the current curve, (ii) randomly deform it,
and repeat a total of R times. This random process specifies a probability distribution over c(R).
We now elaborate on the details of this recursive process. The parameters of the process are
1. R 2 Z, the number of steps in the process.
2. nr 2 Z, the degree of the curve c(r), for each r = 0, . . . , R. The sequence of {nr}R0 must be strictly
monotonically increasing. For convenience, we will denote the number of control points at a certain
step r to be Jr = 2nr + 1.
3. µr 2 R2Jr , the average set of deformations applied at step r = 0, . . . , R. Note that this vector contains
a stack of deformations, not just one.
4. ⌃r 2 R2Jr
⇥2Jr , the covariance in the set of deformations applied at step r = 0, . . . , R.
For these parameters, Er is the degree-elevation matrix going from degree nr�1to nr, N(·, ·) is a 2Jr-variate
normal distribution and Tr is the stacked deformation orienting matrix.
8
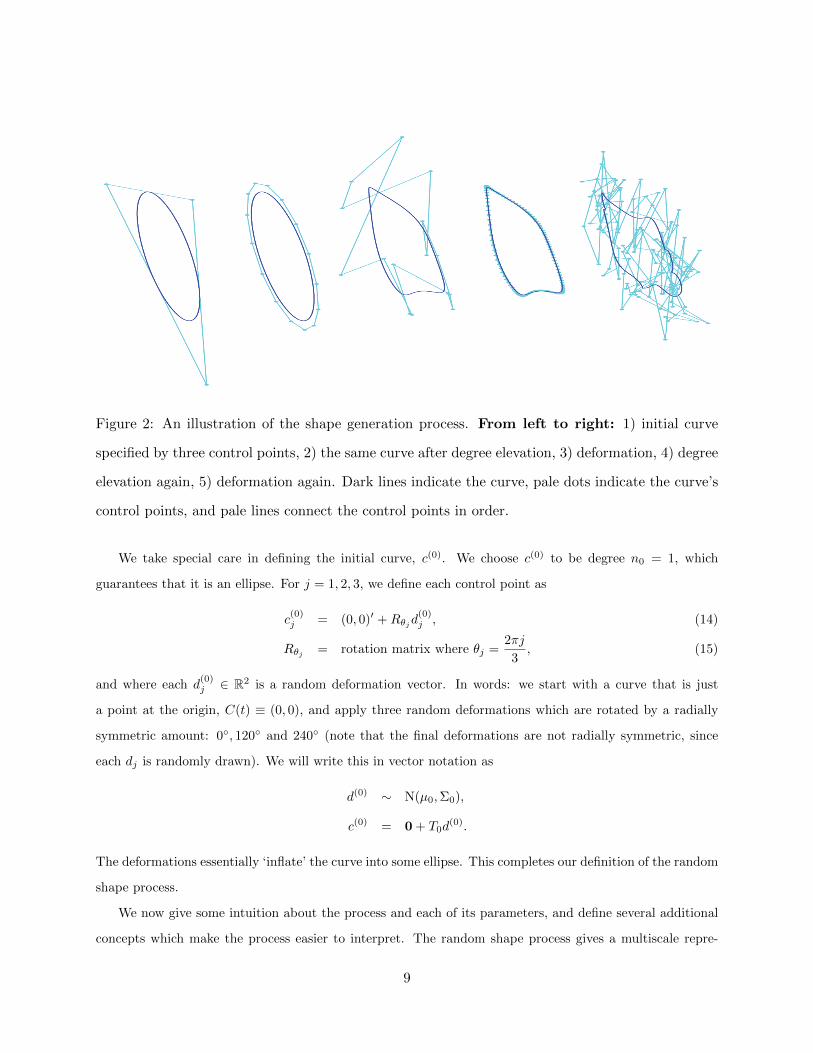
Figure 2: An illustration of the shape generation process. From left to right: 1) initial curve
specified by three control points, 2) the same curve after degree elevation, 3) deformation, 4) degree
elevation again, 5) deformation again. Dark lines indicate the curve, pale dots indicate the curve’s
control points, and pale lines connect the control points in order.
We take special care in defining the initial curve, c(0). We choose c(0) to be degree n0 = 1, which
guarantees that it is an ellipse. For j = 1, 2, 3, we define each control point as
c(0)j = (0, 0)0 +R✓j
d(0)j , (14)
R✓j
= rotation matrix where ✓j =2⇡j
3, (15)
and where each d(0)j 2 R2 is a random deformation vector. In words: we start with a curve that is just
a point at the origin, C(t) ⌘ (0, 0), and apply three random deformations which are rotated by a radially
symmetric amount: 0�, 120� and 240� (note that the final deformations are not radially symmetric, since
each dj is randomly drawn). We will write this in vector notation as
d(0) ⇠ N(µ0,⌃0),
c(0) = 0+ T0d(0).
The deformations essentially ‘inflate’ the curve into some ellipse. This completes our definition of the random
shape process.
We now give some intuition about the process and each of its parameters, and define several additional
concepts which make the process easier to interpret. The random shape process gives a multiscale repre-
9

sentation of shapes, because each step in the process produces increasingly fine-scale deformations, through
degree-elevation.
R is then the number of scales or ‘resolutions’ captured by the process. Each nr specifies the number of
control points at resolution r. We will use Sr to denote the class of shapes that can be exactly represented
by a degree nr Roth curve. If {nr}R1 is monotonically increasing, then S1 ⇢ S2 ⇢ . . . ⇢ SR. Thus, the
deformations d(r) roughly describe the additional details gained going from Sr�1 to Sr.
µr is the mean deformation at level r. Based on {µr, r = 0, . . . , R}, we define the ‘central shape’ of the
random shape process, cµ as:
cµ := c(R)µ
c(r)µ = Erc(r�1)µ + Tr(c
(r�1)µ )µr
Note that c⇤ is simply the deterministic result of the random shape process when each d(r) = µr, rather
than being drawn from a distribution centered on µr. Thus, all shapes generated by the process tend to be
deformed versions of the central shape. We illustrate this in Figure 3. If the random shape process is used
to describe a population of shapes, the central shape provides a good summary.
(a) (b) (c)
Figure 3: Random samples from the shape-generating process (red: the central shape, blue: ran-
dom samples). (a) A moon-shaped population, (b) star-shaped population, (c) high-variance but
symmetry-constrained population.
⌃r determines the covariance of the deformations at level r. This naturally controls the variability among
shapes generated by the process. If the variance is very small, all shapes will be very similar to the central
shape. ⌃r can also be chosen to induce correlation between deformation vectors at the same resolution, in
the typical way that correlation is induced between dimensions of a multivariate normal distribution. This
10
allows us to incorporate higher-level assumptions about shape, such as reflected or radial symmetry. For
example, if R = 2, n1 = 1 and n2 = 2, we can specify perfect correlation in ⌃2, such that d(2)1 = d(2)4 and
d(2)2 = d(2)3 . The resulting shapes are guaranteed to be symmetrical along an axis of reflection.
In the subsequent sections 4 and 5, we show how to use our random shape process to guide curve-fitting
for various types of data.
3. PROPERTIES OF THE PRIOR
3.1 General notations
The supremum and L1-norm are denoted by || · ||1 and || · ||1, respectively. We let || · ||p,⌫ denote the
norm of Lp(⌫), the space of measurable functions with ⌫-integrable pth absolute power. The notation C(X )
is used for the space of continuous functions f : X ! R endowed with the uniform norm. For ↵ > 0
, we let C↵(X ) denote the Holder space of order ↵, consisting of the functions f 2 C(X ) that have b↵c
continuous derivatives with the b↵cth derivative fb↵c being Lipschitz continuous of order ↵�b↵c. We write
“-” for inequality up to a constant multiple and {a(1), a(2), . . . , a(n)} to denote the order statistics of the set
{ai : ai 2 R, i = 1, . . . , n}.
3.2 Support
Let the Holder class of periodic functions on [�⇡,⇡] of order ↵ be denoted by C↵([�⇡,⇡]). Define the class
of closed parametric curves SC(↵1,↵2) having di↵erent smoothness along di↵erent coordinates as
SC(↵1,↵2) := {S = (S1, S2) : [�⇡,⇡] ! R2, Si2 C↵
i([�⇡,⇡]), i = 1, 2}. (16)
Consider for simplicity a single resolution Roth curve with control points {cj , j = 0, . . . , 2n}. Assume
we have independent Gaussian priors on each of the two coordinates of cj for j = 0, . . . , 2n, i.e., C(t) =P2n
j=0 cjBnj (t), cj ⇠ N2(0,�2
j I2), j = 0, . . . , 2n. Denote the prior for C by ⇧Cn . ⇧Cn defines an independent
Gaussian process for each of the components of C. Technically speaking, the support of a prior is defined
as the smallest closed set with probability one. Intuitively, the support characterizes the variety of prior
realizations along with those which are in their limit. We construct a prior distribution to have large
support so that the prior realizations are flexible enough to approximate the true underlying target object.
As reviewed in van der Vaart and van Zanten (2008), the support of a Gaussian process (in our case ⇧Cn)
is the closure of the corresponding reproducing kernel Hilbert space (RKHS). The following Lemma 3.1
describes the RKHS of ⇧Cn , which is a special case of Lemma 2 in Pati and Dunson (2011).
11

Lemma 3.1 The RKHS Hn of ⇧Cn consists of all functions h : [�⇡,⇡] ! R2 of the form
h(t) =2nX
j=0
cjBnj (t) (17)
where the weights cj range over R2. The RKHS norm is given by
||h||2Hn
=2nX
j=0
||cj ||2/�2
j . (18)
The following theorem describes how well an arbitrary closed parametric surface S0 2 SC(↵1,↵2) can be
approximated by the elements of Hn for each n. Refer to Appendix A for a proof.
Theorem 3.2 For any fixed S0 2 SC(↵1,↵2), there exists h 2 Hn with ||h||2Hn
K1P2n
j=0 1/�2j such that
||S0 � h||1 K2n�↵(1) log n (19)
for some constants K1,K2 > 0 independent of n.
This shows that the Roth basis expansion is su�ciently flexible to approximate any closed curve arbitrarily
well. Although we have only shown large support of the prior under independent Gaussian priors on the
control points, the multiscale structure should be even more flexible and hence rich enough to characterize
any closed curve. We can also expect minimax optimal posterior contraction rates using the prior ⇧Cn
similar to Theorem 2 in Pati and Dunson (2011) for suitable choices of prior distributions on n.
3.3 Influence of the control points
The unique maximum of basis function Bnj (t) defined in (1) is at t = �2⇡(j�1)/J , therefore the control point
cj has the most significant e↵ect on the shape of the curve in the neighborhood of the point C(�2⇡(j�1)/J).
Note that Bnj (t) vanishes at t = ⇡ � 2⇡(j � 1)/J , thus cj has no e↵ect on the corresponding point i.e., the
point of the curve is invariant under the modication of cj . The control point cj a↵ects all other points of the
curve, i.e. the curve is globally controlled. These properties are illustrated in Figure 4.
However, we emphasize following Proposition 5 in Roth et al. (2009) that while control points have a
global e↵ect on the shape, this inuence tends to be local and dramatically decreases on further parts of the
curve, especially for higher values of n.
4. INFERENCE FROM POINT CLOUD DATA
We now demonstrate how our multiscale closed curve process can be used as a prior distribution for fitting
a shape to a 2D point cloud. As a byproduct of fitting, we also obtain an intuitive description of the shape
in terms of deformation vectors.
12

Figure 4: Influence of the control point on the Roth curve
Assume that the data consist of points {pi 2 <
2, i = 1, . . . , N} concentrated near a 2D closed curve.
Since a Roth curve can be thought of as a function expressing the trajectory of a particle over time, we view
each data point, pi, as a noisy observation of the particle’s location at a given time ti,
pi = C(ti) + ✏i, ✏i ⇠ N2(0,�2I2). (20)
(20) shares a similar form to nonlinear factor models, where ti is the latent factor score. First, we will rewrite
the point cloud model in stacked vector notation. Defining
p = (p1,x, p1,y, . . . , pN,x, pN,y)0, ✏ = (✏1,x, ✏1,y, . . . , ✏N,x, ✏N,y)
0
t = (t1,x, t1,y, . . . , tN,x, tN,y)0, X(t)0 = [X(t1)
0X(t2)0 . . . X(tN )0]
we have
p = X(t)c+ ✏, ✏ ⇠ N2N (0,�2I2N ) (21)
where X(ti) is as defined in (11).
To fit a Roth curve through the data, we want to infer P (c | p), the posterior distribution over control
points c, given the data points p. To compute this, we must specify P (p | c), the likelihood, and P (c),
the prior distribution over Roth curves. We choose P (c) to be the probability distribution induced by the
shape-generating random process specified in §2.5. From (21), we can specify the likelihood function as,
P ({pi}N1 | {ci}
J1 ) =
NY
i=1
N2
✓
pi;JX
j=1
cjBj(ti),�2I2
◆
, (22)
P (p | c) = N2N (p;X(t)c,�2I2N ). (23)
This completes the Bayesian formulation for inferring c, given p and t. In §7, we describe the exact method
for performing Bayesian inference.
13

In many applications, ti is not known and can be treated as a latent variable. We propose a prior for ti
conditionally on c, which is designed to be uniform over the curve’s arc-length. This prior is motivated by
the frequentist literature on arc-length parameterizations (Madi 2004), but instead of assigning the values
{ti 2 [�⇡,⇡]} in a deterministic preliminary step prior to statistical analysis, we use a Bayesian approach
to formally accommodate uncertainty in parameterization of the points. Define the arc-length function
A : [�⇡,⇡] 7! R+
A(u) := A(u; (c0, . . . , c2n)) =
Z u
�⇡
||H(t)||dt. (24)
Note that A is monotonically increasing and satisfies A(�⇡) = 0, A(⇡) = L(c0, . . . , c2n) where L(c0, . . . , c2n)
is the length of the curve conditional on the control points (c0, . . . , c2n) and is given byR ⇡
�⇡||H(t)||dt.
Given (c0, . . . , c2n), we draw li ⇠ Unif(0, L(c0, . . . , c2n)) and set ti = A�1(li). Thus we obtain a prior
for the ti’s which is uniform along the length of the curve and is given by
p(t) =||H(t)||
R ⇡
�⇡||H(t)||dt
.
Thus the high velocity regions on the curve are penalized more and the low velocity regions are penalized less
to enable uniform arc-length parameterizations. We will discuss a griddy Gibbs algorithm for implementing
the arc-length parametrization in a fully Bayesian framework in §7.
5. INFERENCES FROM PIXELATED IMAGE DATA
In this section, we show how to model image data by converting it to point cloud data. We also show how
image data gives a bonus estimate for the object’s surface orientation, !i at each point pi. We incorporate this
extra information into our model to improve fitting, with essentially no sacrifice in computational e�ciency.
A grayscale image can be treated as a function Z : R2! R. The gradient of this function, rZ : R2
! R2
is a vector field, where rZ(x, y) is a vector pointing in the direction of steepest ascent at (x, y). In computer
vision, it is well known that the gradient norm of the image, ||rZ||2 : R2! R approximates a ‘line-drawing’
of all the high-contrast edges in the image. Our goal is to fit the edges in the image with our shape model.
In practice, an image is discretized into pixels {za,b | a = 1, . . . , X, b = 1, . . . , Y } but a discrete version
of the gradient can still be computed by taking the di↵erence between neighboring pixels, such that one
gradient vector, ga,b is computed at each pixel. The image’s gradient norm is then just another image, where
each pixel ma,b = ||ga,b||2.
Finally, we extract a point cloud: {(a, b) | ma,b > M, a = 1, . . . , X, b = 1, . . . , Y } where M is some
user-specified threshold. Each point (a, b) can still be matched to a gradient vector ga,b. For convenience, we
will re-index them as pi and gi. The gradient vector points in the direction of steepest change in contrast, i.e.
14

it points across the edge of the object, approximating the object’s surface normal. The surface orientation
is then just !i = arctan( gi,ygi,x
).
In the following, we describe a model relating a Roth curve to each !i. This model can be used together
with the model we specified earlier for the pi.
5.1 Modeling surface orientation
Denote by vi = (Hx(ti), Hy(ti)) 2 R2 the velocity vector of the curve C(t) at the parameterization location
ti, i = 1, . . . , N . Note that vi is always tangent to the curve. Since each !i points roughly normal to the
curve, we can rotate all of them by 90 degrees, ✓i = !i +⇡2 , and treat each ✓i as a noisy estimate of vi’s
orientation. Note that we cannot rotate the vector gi by 90 degrees and directly treat it as a noisy observation
of vi. In particular, gi ’s magnitude bears no relationship to the magnitude of vi: ||gi|| is the rate of change
in image brightness when crossing the edge of the shape, while ||vi|| describes the speed at which the curve
passes through pi.
Suppose we did have some noisy observation of vi, denoted ui. Then, we could have specified the following
linear model relating the curve {cj , j = 1, . . . , J} to the ui’s:
ui = vi + �i (25)
=JX
j=1
cjd
dtBj(ti) + �i (26)
for i = 1, . . . , N where �i ⇠ N2(0, ⌧2I2). Instead, we only know the angle of ui, ✓i. In §7, we show that using
this model, we can still write the likelihood for ✓i, by marginalizing out the unknown magnitude of ui. The
resulting likelihood still results in conditional conjugacy of the control points.
6. FITTING A POPULATION OF SHAPES
We can extend our methodology in the previous section to simultaneously fit and characterize a collection of
K separate point clouds, via hierarchical modeling. In the previous section, we used the random shape process
as a prior with fixed parameters. Now, we will instead treat the random shape process as a latent mechanism
which generated all K shapes. The inferred parameters of the latent shape process then characterize the
collection of shapes.
As a reminder, the parameters of the random shape process and their interpretations are defined in §2.5.
Rather than fixing their values, we will treat µr and ⌃r for r = 0, . . . , R as unknowns and place the following
priors on them:
15

µr ⇠ N2Jr
(µµr
,⌃µr
),
⌃�1r = diag
✓
h
⌧ (r)1,x , ⌧(r)1,y , ⌧
(r)2,x , ⌧
(r)2,y , · · · , ⌧
(r)Jr
,x, ⌧(r)Jr
,y
i0◆
,
⌧ (r)u ⇠ Gamma (↵⌧ ,�⌧ ) for u = {1, . . . Jr}⇥ {x, y},
where diag (v) takes any vector v 2 Rd and produces the diagonal matrix V 2 Rd⇥d with elements of v along
the diagonal. We will continue to treat R and {nr | r = 0, . . . , R} as fixed, although we plan to consider in-
ferring these quantities in future work. Note that the prior on ⌃r only permits diagonal covariance structure,
assuming independence between deformations (and between the x/y components of each deformation). In
future work, it will be interesting to remove this simplifying assumption and characterize inter-deformation
correlation. Nonetheless, the inferred values ofn
⌧ (r)u | u = {1, . . . Jr}⇥ {x, y}, r = 0, . . . , Ro
can still be use-
fully interpreted. For example, a high value for ⌧ (R)2,y indicates that there is a high-level of variability in
the second deformation vector at resolution R (implying a fairly fine-scale deformation). Since it is the
y-component, this corresponds to variability normal to the shape surface.
We now formalize the concept that all K shapes are generated from a single random shape process.
Denote the kth point cloud as pk for k = 1, . . .K. Each pk is fit by a curve ck, which is composed from the
deformations�
d(r),k | r = 0, . . . , R
and each d(r),k ⇠ N (µr,⌃r). This hierarchical structure also induces
dependence between the K shapes, enabling curves to borrow information from each other during fitting.
An additional challenge that arises from modeling multiple shapes is inter-shape alignment (also known
as registration). This typically involves removing di↵erences in object position, orientation and scale. Here,
we only deal with position and orientation. According to (14), our random shape process generates shapes
centered at (0, 0) and rotated to a fixed angle. However, in an actual population of shapes, each shape is
rotated to a di↵erent angle and centered at a di↵erent location. We can modify (14) to account for this
simply by adding parameters for the position, mk2 R2, and orientation, �k
2 [�⇡,⇡], of each object k:
c(0)j = mk +R�kR✓j
d(0)j ,
where R�k is a rotation matrix. In the experiments we perform, we manually set �k for each object k. The
orientation of level r = 0 orients all subsequent levels. This is su�cient to align the entire population and
make the deformation vectors of each shape directly comparable.
We also note that the definition of �k has an important anchoring e↵ect on tk. The prior for tk is
conditional on the curve ck. Since the random shape process prior for the curve is oriented by �k, the prior
for tk favors parametrizations that conform to this orientation.
16

7. POSTERIOR COMPUTATION
In §6, we presented a model for characterizing and fitting a population of K closed curves, with unknown
underlying parametrization. We now present an MCMC algorithm for sampling from the joint posterior of
this model. This involves deriving the conditional posteriors of mk, d(r),k, µr,⌃r and tk for r = 0, . . . , R and
k = 1, . . . ,K.
7.1 Conditional posteriors for mk and d(r),k
The conditional posteriors for mk and d(r),k are the most challenging to sample from, because our model’s
likelihood function is nonlinear in these terms, preventing conditional conjugacy. To overcome this, we derive
a linear approximation to the true likelihood function, which does yield conditional conjugacy, and then use
samples from the approximate conditional posterior as proposals in a Metropolis-Hastings step.
We first present the source of nonlinearity in the likelihood function. Recall from §4 that:
P (pk | c(R),k) = N2N (pk;X(tk)c(R),k,�2I2N ).
From §2.5, we note that c(R),k is the result of combining the deformations�
d(r),k | r = 0, . . . , R
through
the following recursive relation, with mk appearing in the base case:
c(r),k = Erc(r�1),k + Tr
⇣
c(r�1),k⌘
d(r),k (27)
c(0),k = mk + T�kT0d(0),k (28)
At each step r of the recursive process, the deformation-orienting matrix Tr is a nonlinear function of the
previous c(r�1),k. As a result, c(R),k is nonlinear in d(r),k for r = 0, . . . , R � 1. For any given step of
the process, we can replace the true recursive relation with a linear approximation. In particular, we will
substitute Tr(c(r�1),k)d(r),k with Tr,kc(r�1),k, where Tr,k will be derived shortly. The new approximate step
is then
c(r),k ⇡
⇣
Er + Tr,k
⌘
c(r�1),k. (29)
If we wish to write c(R),k linearly in terms of c(r),k for any r = 0, . . . , R, we can replace every recursive
step from r to R with the approximate step given in (29). We emphasize that steps 0, . . . r � 1 follow the
original recursive relation. This yields the following approximation:
c(R),k⇡ ⌦R
r+1c(r),k, ⌦b
a =
8
>
>
>
<
>
>
>
:
bY
⇢=a
⇣
E⇢ + T⇢,k
⌘
if a < b
1 otherwise.
(30)
17

Now, by combining (27) and (30), we have that:
c(R),k⇡
8
>
<
>
:
⌦Rr+1
⇥
Erc(r�1),k + Tr
�
c(r�1),k�
d(r),k⇤
r > 0
⌦R1
�
mk + T�kT0d(0),k�
r = 0
Thus, the approximation of c(R),k can be written linearly in terms of any d(r),k or mk. Note that it is
still nonlinear in d(⇢),k for any ⇢ 6= r. However, for MCMC sampling, we only need one d(r),k to be linear
at a time, holding all others fixed. Lastly, we note that the approximation becomes increasingly good as r
approaches R, because the number of approximate steps (contained in ⌦ba) decrease.
We are now ready to derive the approximate conditional posteriors for mk and d(r),k. First, we claim
that these posteriors can all be written in the following form for generic ‘x’, ‘y’ and ‘z’.
P (x | �) / N(y;Qx,⌃y) N (x; z,⌃x) (31)
P (x | �) = N⇣
µ, ⌃⌘
, ˆ⌃�1 = ⌃�1x +
X
k
Q0⌃�1y Q, µ = ⌃
⌃�1x z +
X
k
Q0⌃�1y y
!
. (32)
Note that each approximate conditional posterior is simply a multivariate normal. We now show that each
approximate posterior can be rearranged to match the form of (31) - (32).
Papprox(mk| �) / N
⇣
pk;X(tk)c(R),k,�2I2Nk
⌘
N(mk;µm,⌃m)
/ N⇣
pk;X(tk)⌦R,k1
⇣
mk + T0d(0),k
⌘
,�2I2Nk
⌘
N(mk;µm,⌃m)
/ N⇣
pk � X(tk)⌦R,k1 T0d
(0),k;X(tk)⌦R,k1 mk,�2I2Nk
⌘
N(mk;µm,⌃m)
Papprox(d(r),k
| �) / N⇣
pk;X(tk)c(R),k,�2I2Nk
⌘
N(d(r),k;µr,⌃r)
/ N⇣
pk;X(tk)⌦Rr+1
h
Erc(r�1),k + Tr
⇣
c(r�1),k⌘
d(r),ki
,�2I2Nk
⌘
N(d(r),k;µr,⌃r)
/ N⇣
pk � X(tk)⌦Rr+1Erc
(r�1),k;X(tk)⌦Rr+1Tr
⇣
c(r�1),k⌘
d(r),k,�2I2Nk
⌘
N(d(r),k;µr,⌃r)
We then use Papprox(mk| �) and Papprox(d(r),k | �) as M-H proposal distributions to sample from their
true counterparts. Both are multivariate normals and if necessary, their variance parameters may be tuned
to improve sampling e�ciency.
7.2 Derivation of the approximate deformation-orienting matrix, T
For visual clarity of the derivation, we will temporarily drop superscripts denoting the resolution r and object
index k of each variable. First, we recall from §2 that T (c) is a block diagonal matrix with blocks consisting
of the rotation matrices Rj , for j = 1, . . . , J (where J is the total number of control points at the particular
resolution r). Each Rj rotates its corresponding deformation, dj , by ✓j = arctan⇣
Hy
(qj
)H
x
(qj
)
⌘
. Now, using the
18

identities
cos(arctan(x/y)) =x
p
x2 + y2, sin(arctan(x/y)) =
yp
x2 + y2,
we can write Rj as:
Rj =1
sj(c)
2
4
Hx(qj) �Hy(qj)
Hy(qj) Hx(qj)
3
5
where sj(c) =p
Hx(qj)2 +Hy(qj)2. This term intuitively represents the “speed” of the curve at parametric
position qj . It is reasonable to think that the curve’s speed does not vary greatly among samples in the
posterior, because in §4 we imposed a prior that encourages arc-length uniform parametrization, and because
the total arc-length of the curve is not expected to vary greatly. Therefore, we approximate this term with
the fixed constant Sj = sj(cprev), where cprev is just the curve sampled in the previous iteration of the
M-H sampler. Lastly note that the hodograph, H (t) = X(t)c, is a linear function of c. So, we can now
approximate Rj as a linear function of c:
Rj ⇡
1
Sj
2
4
Xx(qj,)c �Xy(qj)c
Xy(qj)c Xx(qj)c
3
5 .
Then, we can write Rjdj as:
Rjdj ⇡ Rjc, Rj =1
Sj
2
6
4
⇣
Xx(qj,)dj,x � Xy(qj)dj,y⌘
⇣
Xy(qj)dj,x � Xx(qj)dj,y⌘
3
7
5
,
and finally we define T = block⇣
R1, . . . , RJ
⌘
.
7.3 Conditional posteriors for µr and ⌃r
P (µr | �) = N⇣
µr, ⌃µr
⌘
⌃�1µr
= ⌃�1µr
+K⌃�1r
µr = ⌃µr
⌃�1µr
µµr
+ ⌃�1r
KX
k=1
d(r),k!
P
✓
⌃r = diag⇣
⌧ (r)1,x , ⌧(r)1,y , ⌧
(r)2,x , ⌧
(r)2,y , · · · , ⌧
(r)Jr
,x, ⌧(r)Jr
,y
⌘�1| �
◆
=Jr
Y
j=1
P⇣
⌧ (r)j,x | �
⌘
P⇣
⌧ (r)j,y | �
⌘
P (⌧ (r)j,x | �) = Ga⇣
↵(r)j,x, �
(r)j,x
⌘
↵(r)j,x = ↵⌧ +K �(r)
j,x = �⌧ +
KX
k=1
⇣
d(r),kj,x � µr,j,x
⌘2
2
19

7.4 Griddy Gibbs updates for the parameterizations tki
We discretize the possible values of tki 2 [�⇡,⇡] to obtain a discrete approximation of its conditional posterior:
tki | � ⇠
N(pki ;X(ti)c(R),k,�2I2)P (tki | c(R),k)P
⌧2[�⇡,⇡] N(pki ;X(⌧)c(R),k,�2I2)P (tki | c(R),k)
We can make this arbitrarily accurate, by making a finer summation over ⌧ .
7.5 Likelihood contribution from surface-normals
Define
Xx(ti) =
dBn10 (ti)
dt, 0,
dBn11 (ti)
dt, 0, · · · ,
dBn12n1
(ti)
dt, 0
�
(33)
Xy(ti) =
0,dBn1
0 (ti)
dt, 0,
dBn11 (ti)
dt, · · · , 0,
dBn12n1
(ti)
dt
�
(34)
Proposition 1 The likelihood contribution of the tangent directions ✓ki , i = 1, . . . , Nk ensures conjugate
updates of the control points for a multivariate normal prior.
Proof Recall the noisy tangent direction vectors uki ’s and vki ’s in (25). Using a simple reparameterization
uki = (eki , e
ki tan ✓
ki )
where only ✓0is are observed and ei’s aren’t. Observe that
vki = (Hx(ti), Hy(ti)) = (Xx(tki )c
(3),k, Xy(tki )c
(3),k). (35)
Assuming a uniform prior for the mki ’s on R, the marginal likelihood of the tangent direction ✓ki given ⌧2
and the parameterization tki is given by
l(✓ki ) =1
2⇡⌧2
Z 1
�1exp
�
1
2⌧2{(eki � Xx(t
ki )c
(3),k)2 + (eki tan(✓i)� Xy(tki )c
(3),k)2}
�
deki
It turns out the above expression has a closed form given by
l(✓ki ) =1
2⇡⌧2
p
2⇡⌧2p
1 + tan2(✓ki )exp
"
�
1
2⌧2
(
(Xx(tki )c
(3),k)2 + (Xy(tki )c
(3),k)2 �(Xx(tki )c
(3),k + Xy(tki )c(3),k tan(✓i))2
1 + tan2(✓ki )
)#
.
The likelihood for the {✓ki , i = 1, . . . , Nk} is given by
L(✓k1 , . . . , ✓kNk
) /
1
⌧Nk
exp
2
4
�
1
2⌧2
Nk
X
i=1
(Xx(tki )c(3),k)2 tan2(✓i) + (Xy(tki )c
(3),k)2 � 2Xx(tki )c(1),kXy(tki )c
(1),k tan(✓i)
1 + tan2(✓i)
3
5
=1
⌧Nk
exp
"
�
1
2⌧2(c(3),k)0
(
NX
i=1
(T ki )
0⌃ki T
ki
)
c(3),k#
20

where
⌃i =
0
@
tan2(✓k
i
)1+tan2(✓k
i
)� tan(✓k
i
)1+tan2(✓k
i
)
� tan(✓k
i
)1+tan2(✓k
i
)1
1+tan2(✓k
i
)
1
A
and Ti = [(Xx(tki ))0 (Xy(tki )
0] is a 2(2n3+1)⇥2 matrix. Clearly, an inverse-Gamma for ⌧2 and a multivariate
normal prior for the control points are conjugate choices. ⇤
7.6 Approximate Bayesian Multiresolution Sampler
One encounters some practical issues when running the MCMC algorithm proposed above. Firstly, there
can be slow mixing caused by high posterior dependence between the unknowns characterizing the curves
at di↵erent levels of resolution. In addition, as the curves at the coarser scales only have an indirect
impact on the likelihood of the data, one encounters identifiability issues, which create problems if one
wishes to interpret the curves at di↵erent resolutions. Identifiability restrictions can be enforced to maintain
interpretability (e.g., curves at di↵erent resolutions have a common area), but such constraints lead to highly
challenging computation.
In the frequentist multiresolution modeling literature, it is standard practice to apply multistage esti-
mation procedures, which fit a curve at one level of resolution, and then proceed to analyze the residuals at
the next level of resolution. Such approaches can have excellent performance in producing a point estimate,
but it is challenging to fully accommodate uncertainty in curve estimation across resolutions.
We accomplish this using a simple approximate Bayesian multiresolution sampler (AB-MS), which is a
typical MCMC algorithm with one important exception - in updating the unknowns specific to a curve at a
given level of resolution, one sets all higher resolution deformations equal to zero. By discarding finer scale
structure in updating course-scale unknowns, we solve the identifiability and mixing issues but no longer
obtain an exact Bayesian procedure. There is a rich precedent in the literature for related approximations;
for example, algorithms for cutting ‘feedback’ in joint modeling (Lunn et al., 2009; McCandless et al., 2010).
8. SIMULATION STUDY
We evaluate our method by defining a true underlying curve, c⇤, and checking to see how accurately this
curve can be recovered by our model under various conditions. We first define several concepts to help
interpret our results. Given some curve c, let B(c) = {X(t)c | t 2 [�⇡,⇡]}(the set of all points along the
curve), and let A(c) denote the interior region enclosed by the curve.
For a given distribution over curves, P (c), we define its boundary heatmap, MBP (c) : R2
! R, and its
21

Figure 5: We generated and fit a point cloud of size (a) N = 10, (b) N = 30 and (c) N = 100.
The points are shown as blue dots. The true curve, c⇤is shown in red. The colored regions are
percentiles of MBP (c|p) (orange: top 30%, cyan: top 50%, blue: top 80%). Note that the bands of
uncertainty shrink as N increases. Also note that there is a wider band of uncertainty where the
data is missing.
region heatmap, MAP (c) : R
2! R, as:
MAP (c) (x, y) = P ((x, y) 2 A (c)) ,
MB (x, y) dxdy = P ((x+ dx, y + dy) \B(c)) .
Given a set of samples from the distribution P (c), {cs | s = 1, . . . , S}, we can discretely approximate MBP (c)
and MAP (c) as:
MBP (c) (x) ⇡ TODO, MA
P (c) (x) ⇡1
S
SX
s=1
1 (x 2 A (cs)) ,
and the mean can be approximated by c = 1S
SX
s=1
cs.
8.1 Inferring shape from a single point cloud
We generate a single point cloud p concentrated along c⇤using the point cloud model defined in §4. To make
the task even more challenging, we also randomly remove a segment of the cloud, resulting in a large gap.
We then infer a curve from the point cloud, using the AB-MS algorithm described in §7.6. We then interpret
its posterior, P (c | p), using its boundary heatmap MBP (c|p) and measure the mean-squared-error between c
and c⇤. For all cases, the hyperparameters of the prior were set to: TODO. The MSE was (a) TODO, (b)
TODO and (c) TODO.
8.2 Inferring shape from multiple point clouds
In the above example on fitting a single point cloud, note that uncertainty is naturally high where the point
cloud contains a gap. This uncertainty can be reduced if the investigator can “borrow information” from
other point clouds known to be from the same population of shapes. In particular, we will assume that
multiple shapes are drawn from the same random shape process, as described in §6, and fit all of them
simultaneously. The hyperparameters of the prior were set to: TODO.
Besides simply fitting each shape in the population, we can also extract information from the inferred
latent variables of our random shape process. In particular, the central shape cµ (defined in §2.5) is iden-
22
Figure 6: From the same true curve c⇤, we generated multiple rotated point clouds. Note that the
gaps in each shape are intelligently fit with shape information borrowed from other members of the
population. All colors and indicators are the same as in Figure ??.
tifiable and provides a useful summary of the entire population. In the following example, we generate 16
randomly deformed instances of c⇤and fit the resulting point clouds (for visual clarity, we have limited the
noise of these point clouds). The posterior distribution for cµsuccessfully captures the artificially injected
variability in shape. Again, we interpret P�
cµ |
�
pk �
using its boundary heatmap MBP (c
µ
|{pk}) (just MB
for notational convenience).
8.3 Assessment of mixing, convergence
# of samples, burn in
sensitivity analysis
raftery lewis check for convergence
9. BRAIN TUMOR IMAGING STUDY
In brain tumor diagnosis and therapy, it is very important to account for uncertainty in the tumor’s outline.
This information is crucial for assessing whether a tumor has grown/regressed over time, and even more
important if a surgeon must target the tumor for excision or radiation therapy. In that situation, there is a
critical tradeo↵ between false positives (targeting healthy tissue) and extremely undesirable false negatives
(missing the tumor). Furthermore, tumor outlines are notoriously hard to determine. Error stems from
the poor contrast between tumor and healthy tissue in magnetic resonance imaging (MRI), the prevalent
modality for diagnosis. Even seasoned experts di↵er greatly when tracing an estimate.
We use our model to intelligently combine the input traces of multiple experts, by treating each trace as a
point cloud drawn from the same random shape process. We can then interpret P (cµ | {pk}) as the posterior
distribution of the tumor, fully describing the variability and uncertainty among the experts. One might
also run additional tumor segmentation algorithms, and combine their outputs using the same approach. In
this setting, the region heatmap of the posterior, MAP (c
µ
|{pk
}) (shortened to MA), is especially informative.
For every point x, MA(x) gives the probability that it is part of the tumor. This enables a neurosurgeon to
manage the tradeo↵ between false positives/negatives in a principled manner. Let the true tumor region be
Xtumor ⇢ R2 and X{tumor its complement. Then, define the loss function for targeting a region X to be
L(X) = �+Area⇣
X \X{tumor
⌘
+��Area⇣
X{\Xtumor
⌘
.
23

Figure 7: (left) the 16 randomly deformed instances of c⇤, (top right) level sets of MB, (middle
right) level sets of MB if variability in the third resolution, µ3, is removed, (bottom right) level
sets of MB if variability in third (µ3) and second resolutions (µ2) are removed. Note how MB has
the widest band of uncertainty on its left, where the population shows greatest variability.
24

Depending on the ratio of the penalties �+ and ��, the surgeon can minimize L simply by cutting along a
level set of MA.
We can also allow for experts to express varying confidence in di↵erent portions of their trace. This is
desirable, because certain boundaries of the tumor will have high contrast with the surrounding tissue while
other parts won’t, and the expert should not be forced to make an equal opinion on both. We can achieve
this by slightly modifying the point cloud model given in (20). There, we assumed that each point pi was
generated with fixed variance �2p. Instead, we can let �2
pi
= �2p/i, where i is the expert’s confidence in
that point. Furthermore, if the expert has no confidence at all, they can simply leave a gap in their trace.
The model automatically closes the gap, as shown in simulation examples. Lastly, it is also easy to compute
the posterior distribution for quantities such as the size of the tumor, simply by computing the size of each
sample.
10. DISCUSSION
In our current methodology, we have assumed that all K shapes are generated from the same random shape
process. However, in future applications, it may be useful to model the population as a mixture of multiple
random shape processes, resulting in a clustering method. For example, in analyzing a blood sample featuring
sickle cell anemia, it is useful to assume that the population was generated by two random shape processes:
one healthy and one “sickle-shaped”.
A. PROOFS OF MAIN RESULTS
Proof of Theorem 3.2: From (Stepanets 1974) and observing that the basis functions {Bnj , j = 0, . . . , 2n} span
the vector space of trigonometric polynomials of degree at most n, it follows that given any Si0 2 C↵
i([�⇡,⇡]),
there exists hi(u) =P2n
j=0 cijB
nj (u), h
i : [�⇡,⇡] ! R with |cij | Mi, such that ||hi� Si
0||1 Kin�↵i log n
for some constants Mi,Ki > 0, i = 1, 2. Setting h(u) =P2n
j=0(c1j , c
2j )
0Bnj (u), we have
||h� S0||1 Mn�↵(1) log n
with ||h||2H KP2n
j=0 �j where M = M(2),K = K(2).
Proof of Lemma 3.1: TODO.
REFERENCES
Amenta, N., Bern, M., and Kamvysselis, M. (1998), A new Voronoi-based surface reconstruction algorithm,,
in Proceedings of the 25th annual conference on Computer graphics and interactive techniques, ACM,
pp. 415–421.
25
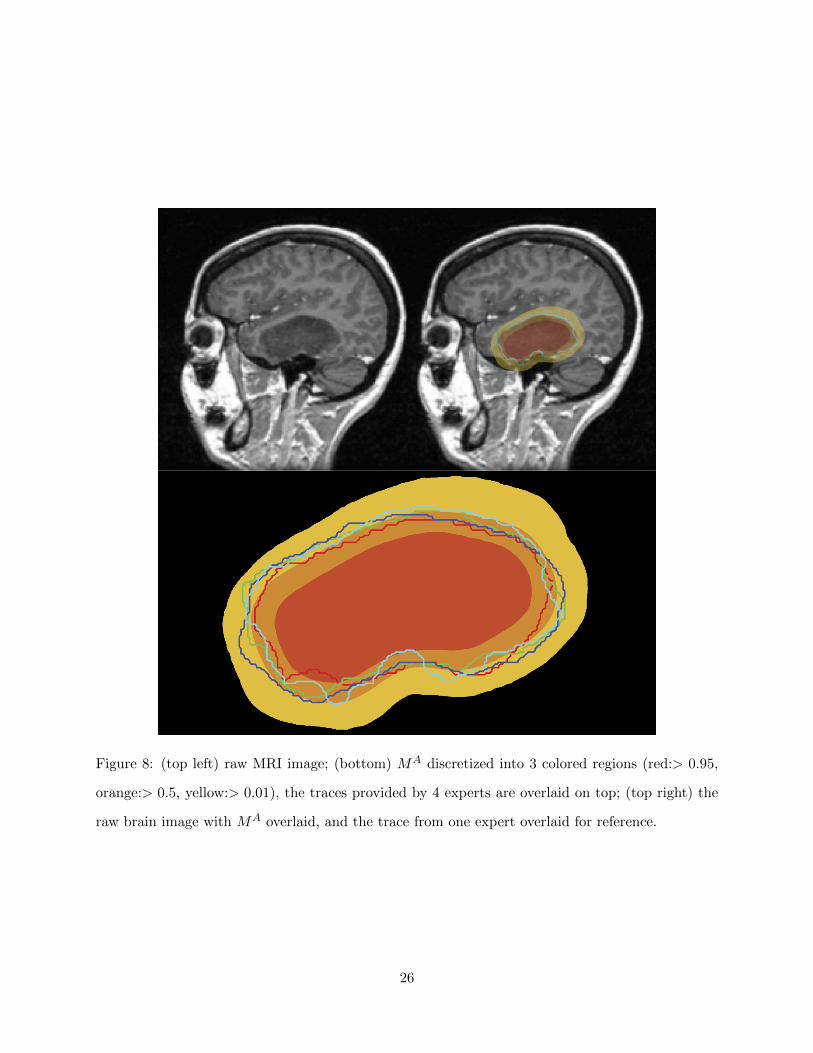
Figure 8: (top left) raw MRI image; (bottom) MA discretized into 3 colored regions (red:> 0.95,
orange:> 0.5, yellow:> 0.01), the traces provided by 4 experts are overlaid on top; (top right) the
raw brain image with MA overlaid, and the trace from one expert overlaid for reference.
26
Aziz, N., Bata, R., and Bhat, S. (2002), “Bezier surface/surface intersection,” Computer Graphics and
Applications, IEEE, 10(1), 50–58.
Barnhill, R. (1985), “Surfaces in computer aided geometric design: A survey with new results,” Computer
Aided Geometric Design, 2(1-3), 1–17.
Bhattacharya, A. (2008), “Statistical analysis on manifolds: A nonparametric approach for inference on
shape spaces,” Sankhya: The Indian Journal of Statistics, 70(Part 3), 0–43.
Bhattacharya, A., and Dunson, D. (2010), “Nonparametric Bayesian density estimation on manifolds with
applications to planar shapes,” Biometrika, 97(4), 851.
Bhattacharya, A., and Dunson, D. (2011a), “Nonparametric Bayes Classification and Hypothesis Testing on
Manifolds,” Journal of Multivariate Analysis, . to appear.
Bhattacharya, A., and Dunson, D. (2011b), “Strong consistency of nonparametric Bayes density estimation
on compact metric spaces,” Annals of the Institute of Statistical Mathematics, . to appear.
Bhattacharya, R., and Bhattacharya, A. (2009), “Statistics on manifolds with applications to shape spaces,”
Publishers page, p. 41.
Bookstein, F. (1986), “Size and shape spaces for landmark data in two dimensions,” Statistical Science,
1(2), 181–222.
Bookstein, F. (1996a), Landmark methods for forms without landmarks: localizing group di↵erences in out-
line shape,, in Mathematical Methods in Biomedical Image Analysis, 1996., Proceedings of the Workshop
on, IEEE, pp. 279–289.
Bookstein, F. (1996b), Shape and the information in medical images: A decade of the morphometric synthe-
sis,, in Mathematical Methods in Biomedical Image Analysis, 1996., Proceedings of the Workshop on,
IEEE, pp. 2–12.
Bookstein, F. (1996c), “Standard formula for the uniform shape component in landmark data,” NATO ASI
SERIES A LIFE SCIENCES, 284, 153–168.
Cinquin, P., Chalmond, B., and Berard, D. (1982), “Hip prosthesis design,” Lecture Notes in Medical Infor-
matics, 16, 195–200.
Desideri, J., Abou El Majd, B., and Janka, A. (2007), “Nested and self-adaptive Bezier parameterizations
for shape optimization,” Journal of Computational Physics, 224(1), 117–131.
27
Desideri, J., and Janka, A. (2004), Multilevel shape parameterization for aerodynamic optimization–
application to drag and noise reduction of transonic/supersonic business jet,, in European Congress
on Computational Methods in Applied Sciences and Engineering (ECCOMAS 2004), E. Heikkola et al
eds., Jyvaskyla, pp. 24–28.
Dryden, I., and Gattone, S. (2001), “Surface shape analysis from MR images,” Proc. Functional and Spatial
Data Analysis, pp. 139–142.
Dryden, I., and Mardia, K. (1993), “Multivariate shape analysis,” Sankhya: The Indian Journal of Statistics,
Series A, pp. 460–480.
Dryden, I., and Mardia, K. (1998), Statistical shape analysis, Vol. 4 John Wiley & Sons New York.
Gong, L., Pathak, S., Haynor, D., Cho, P., and Kim, Y. (2004), “Parametric shape modeling using deformable
superellipses for prostate segmentation,” Medical Imaging, IEEE Transactions on, 23(3), 340–349.
Hagen, H., and Santarelli, P. (1992), Variational design of smooth B-spline surfaces,, in Topics in surface
modeling, Society for Industrial and Applied Mathematics, pp. 85–92.
Hastie, T., and Stuetzle, W. (1989), “Principal curves,” Journal of the American Statistical Association,
pp. 502–516.
Kent, J., Mardia, K., Morris, R., and Aykroyd, R. (2001), “Functional models of growth for landmark data,”
Proceedings in Functional and Spatial Data Analysis, pp. 109–115.
Kume, A., Dryden, I., and Le, H. (2007), “Shape-space smoothing splines for planar landmark data,”
Biometrika, 94(3), 513–528.
Kurtek, S., Srivastava, A., Klassen, E., and Ding, Z. (2011), “Statistical Modeling of Curves Using Shapes
and Related Features,” , .
Lang, J., and Roschel, O. (1992), “Developable (1, n)-Bezier surfaces,” Computer Aided Geometric Design,
9(4), 291–298.
Madi, M. (2004), “Closed-form expressions for the approximation of arclength parameterization for Bezier
curves,” International journal of applied mathematics and computer science, 14(1), 33–42.
Malladi, R., Sethian, J., and Vemuri, B. (1994), “Evolutionary fronts for topology-independent shape mod-
eling and recovery,” Computer VisionECCV’94, pp. 1–13.
Malladi, R., Sethian, J., and Vemuri, B. (1995), “Shape modeling with front propagation: A level set
approach,” Pattern Analysis and Machine Intelligence, IEEE Transactions on, 17(2), 158–175.
28
Mardia, K., and Dryden, I. (1989), “The statistical analysis of shape data,” Biometrika, 76(2), 271–281.
Mokhtarian, F., and Mackworth, A. (1992), “A theory of multiscale, curvature-based shape representation
for planar curves,” IEEE Transactions on Pattern Analysis and Machine Intelligence, 14(8), 789–805.
Mortenson, M. (1985), Geometrie modeling John Wiley, New York.
Muller, H. (2005), Surface reconstruction-an introduction,, in Scientific Visualization Conference, 1997,
IEEE, p. 239.
Pati, D., and Dunson, D. (2011), “Bayesian modeling of closed surfaces through tensor products,” , . (sub-
mitted to Biometrika).
Persoon, E., and Fu, K. (1977), “Shape discrimination using Fourier descriptors,” Systems, Man and Cyber-
netics, IEEE Transactions on, 7(3), 170–179.
Rossi, D., and Willsky, A. (2003), “Reconstruction from projections based on detection and estimation of
objects–Parts I and II: Performance analysis and robustness analysis,” Acoustics, Speech and Signal
Processing, IEEE Transactions on, 32(4), 886–906.
Roth, A., Juhasz, I., Schicho, J., and Ho↵mann, M. (2009), “A cyclic basis for closed curve and surface
modeling,” Computer Aided Geometric Design, 26(5), 528–546.
Sato, Y., Wheeler, M., and Ikeuchi, K. (1997), Object shape and reflectance modeling from observation,,
in Proceedings of the 24th annual conference on Computer graphics and interactive techniques, ACM
Press/Addison-Wesley Publishing Co., pp. 379–387.
Sederberg, T., Gao, P., Wang, G., and Mu, H. (1993), 2-D shape blending: an intrinsic solution to the vertex
path problem,, in Proceedings of the 20th annual conference on Computer graphics and interactive
techniques, ACM, pp. 15–18.
Stepanets, A. (1974), “THE APPROXIMATION OF CERTAIN CLASSES OF DIFFERENTIABLE PERI-
ODIC FUNCTIONS OF TWO VARIABLES BY FOURIER SUMS,” Ukrainian Mathematical Journal,
25(5), 498–506.
Su, B., and Liu, D. (1989), Computational geometry: curve and surface modeling Academic Press Profes-
sional, Inc. San Diego, CA, USA.
Su, J., Dryden, I., Klassen, E., Le, H., and Srivastava, A. (2011), “Fitting Optimal Curves to Time-Indexed,
Noisy Observations of Stochastic Processes on Nonlinear Manifolds,” Journal of Image and Vision
Computing, .
29

van der Vaart, A., and van Zanten, J. (2008), “Reproducing kernel Hilbert spaces of Gaussian priors,” IMS
Collections, 3, 200–222.
Whitney, H. (1937), “On regular closed curves in the plane,” Compositio Math, 4, 276–284.
Zahn, C., and Roskies, R. (1972), “Fourier descriptors for plane closed curves,” Computers, IEEE Transac-
tions on, 100(3), 269–281.
Zheng, Y., John, M., Liao, R., Boese, J., Kirschstein, U., Georgescu, B., Zhou, S., Kempfert, J., Walther,
T., Brockmann, G. et al. (2010), “Automatic aorta segmentation and valve landmark detection in C-
arm CT: application to aortic valve implantation,” Medical Image Computing and Computer-Assisted
Intervention–MICCAI 2010, pp. 476–483.
30


















