Bayesian assimilation of multi-fidelity finite element...
10
Bayesian assimilation of multi-fidelity finite element models F.A. DiazDelaO ⇑,1 , S. Adhikari 2 Civil and Computational Engineering Centre, College of Engineering, Swansea University, Singleton Park, Swansea, SA2 8PP, United Kingdom article info Article history: Received 10 September 2010 Accepted 7 November 2011 Available online 9 December 2011 Keywords: Metamodel Gaussian process emulator Multi-fidelity Domain decomposition methods Finite element method abstract A complex system can be modeled using various fidelities with the finite element method. A high-fidelity model is expected to be more computationally expensive compared to a low-fidelity model and in gen- eral may contain more degrees of freedom and more elements. This paper proposes a novel multi-fidelity approach to solve boundary value problems using the finite element method. A Bayesian approach based on Gaussian process emulators in conjunction with the domain decomposition method is developed. Using this approach one can seamlessly assimilate a low-fidelity model with a more expensive high-fidel- ity model. The idea is illustrated using elliptic boundary value problems. Ó 2011 Elsevier Ltd. All rights reserved. 1. Introduction The size of the finite element models has increased significantly over the past decade. For example, in the automotive industry, 2 to 5 million degrees-of-freedom models are quite common nowa- days. Such high-resolution models, combined with detailed phys- ics can give good fidelity to experimental results. However, a potential disadvantage is that such large models may be computa- tionally expensive. One alternative to address this problem is to use a low-resolution model. Although such low-resolution models are often used during the design iteration, they are likely to be low- fidelity and may miss some crucial physics. The motivation of this paper is therefore to investigate the possibility of improving the fidelity of a low-fidelity model without completely solving a de- tailed high-fidelity problem. A common tool when solving expensive finite element models is the domain decomposition method [1–7], a divide-and-conquer algorithm aimed at solving partial differential equations (PDEs). Its main feature is that a linear system of discretised PDEs is recast as a set of smaller linear systems to be solved separately. A finite ele- ment model can thus be parallelized by partitioning the domain X in a number of subdomains. This allows an increase in the resolu- tion of the model, along with a reduction in CPU requirements. There is, however, a potential disadvantage with this approach, since in order to obtain the finite element solution for each subdo- main, the governing PDEs must be solved in the interface of each pair of subdomains. This paper presents a metamodeling approach, known as Gaussian process emulation, in order to approximate the solution to the interface problem. Broadly speaking, a Gaussian process emulator works by treating a set of training runs as data, which is in turn used to update some prior beliefs about the output of an expensive simulator such as the interface problem. These be- liefs are represented by a Gaussian stochastic process prior distri- bution. As noted by some authors [8], the choice of a Gaussian process is made for much the same reasons that the Gaussian dis- tribution repeatedly appears in statistics: it is analytically tracta- ble, flexible, and quite often realistic. After conditioning on the training runs and updating the prior distribution, the mean of the resulting posterior distribution approximates the output of the simulator at any untried node in the input domain of the inter- face problem, whereas it reproduces the known output at each in- put belonging to the training runs. The idea of using a stochastic process to solve domain decomposition problems has been em- ployed in the past [9]. However, the implementation of Gaussian process emulators is relatively simple and flexible. In addition to this, Gaussian process emulators have already been implemented in various scientific fields in order to alleviate the computational burden of expensive simulators with encouraging results. These fields include climate prediction [10,11], environmental science [12], medicine [13–15], structural dynamics [16,17], reservoir fore- casting [18], hydrogeology [19], quality control [20], heat transfer [21], and reliability analysis [22], among others. The paper is organized as follows. Section 2 introduces the concepts of mutli-fidelity modeling in the context of finite element method. A brief overview of domain decomposition and 0045-7949/$ - see front matter Ó 2011 Elsevier Ltd. All rights reserved. doi:10.1016/j.compstruc.2011.11.002 ⇑ Corresponding author. Tel.: +44 01792 602088; fax: +44 01792 295676. E-mail addresses: [email protected] (F.A. DiazDelaO), s.adhikari@ swansea.ac.uk (S. Adhikari). URLs: http://engweb.swan.ac.uk/~diazdelao/ (F.A. DiazDelaO), http://engweb. swan.ac.uk/~adhikaris/ (S. Adhikari). 1 Project officer at ASTUTE (http://www.astutewales.com/). 2 Professor of Aerospace Engineering. Computers and Structures 92–93 (2012) 206–215 Contents lists available at SciVerse ScienceDirect Computers and Structures journal homepage: www.elsevier.com/locate/compstruc
Transcript of Bayesian assimilation of multi-fidelity finite element...

Computers and Structures 92–93 (2012) 206–215
Contents lists available at SciVerse ScienceDirect
Computers and Structures
journal homepage: www.elsevier .com/locate/compstruc
Bayesian assimilation of multi-fidelity finite element models
F.A. DiazDelaO ⇑,1, S. Adhikari 2
Civil and Computational Engineering Centre, College of Engineering, Swansea University, Singleton Park, Swansea, SA2 8PP, United Kingdom
a r t i c l e i n f o a b s t r a c t
Article history:Received 10 September 2010Accepted 7 November 2011Available online 9 December 2011
Keywords:MetamodelGaussian process emulatorMulti-fidelityDomain decomposition methodsFinite element method
0045-7949/$ - see front matter � 2011 Elsevier Ltd. Adoi:10.1016/j.compstruc.2011.11.002
⇑ Corresponding author. Tel.: +44 01792 602088; faE-mail addresses: [email protected] (
swansea.ac.uk (S. Adhikari).URLs: http://engweb.swan.ac.uk/~diazdelao/ (F.A
swan.ac.uk/~adhikaris/ (S. Adhikari).1 Project officer at ASTUTE (http://www.astutewales2 Professor of Aerospace Engineering.
A complex system can be modeled using various fidelities with the finite element method. A high-fidelitymodel is expected to be more computationally expensive compared to a low-fidelity model and in gen-eral may contain more degrees of freedom and more elements. This paper proposes a novel multi-fidelityapproach to solve boundary value problems using the finite element method. A Bayesian approach basedon Gaussian process emulators in conjunction with the domain decomposition method is developed.Using this approach one can seamlessly assimilate a low-fidelity model with a more expensive high-fidel-ity model. The idea is illustrated using elliptic boundary value problems.
� 2011 Elsevier Ltd. All rights reserved.
1. Introduction
The size of the finite element models has increased significantlyover the past decade. For example, in the automotive industry, 2 to5 million degrees-of-freedom models are quite common nowa-days. Such high-resolution models, combined with detailed phys-ics can give good fidelity to experimental results. However, apotential disadvantage is that such large models may be computa-tionally expensive. One alternative to address this problem is touse a low-resolution model. Although such low-resolution modelsare often used during the design iteration, they are likely to be low-fidelity and may miss some crucial physics. The motivation of thispaper is therefore to investigate the possibility of improving thefidelity of a low-fidelity model without completely solving a de-tailed high-fidelity problem.
A common tool when solving expensive finite element modelsis the domain decomposition method [1–7], a divide-and-conqueralgorithm aimed at solving partial differential equations (PDEs). Itsmain feature is that a linear system of discretised PDEs is recast asa set of smaller linear systems to be solved separately. A finite ele-ment model can thus be parallelized by partitioning the domain Xin a number of subdomains. This allows an increase in the resolu-tion of the model, along with a reduction in CPU requirements.There is, however, a potential disadvantage with this approach,
ll rights reserved.
x: +44 01792 295676.F.A. DiazDelaO), s.adhikari@
. DiazDelaO), http://engweb.
.com/).
since in order to obtain the finite element solution for each subdo-main, the governing PDEs must be solved in the interface of eachpair of subdomains. This paper presents a metamodeling approach,known as Gaussian process emulation, in order to approximate thesolution to the interface problem. Broadly speaking, a Gaussianprocess emulator works by treating a set of training runs as data,which is in turn used to update some prior beliefs about the outputof an expensive simulator such as the interface problem. These be-liefs are represented by a Gaussian stochastic process prior distri-bution. As noted by some authors [8], the choice of a Gaussianprocess is made for much the same reasons that the Gaussian dis-tribution repeatedly appears in statistics: it is analytically tracta-ble, flexible, and quite often realistic. After conditioning on thetraining runs and updating the prior distribution, the mean ofthe resulting posterior distribution approximates the output ofthe simulator at any untried node in the input domain of the inter-face problem, whereas it reproduces the known output at each in-put belonging to the training runs. The idea of using a stochasticprocess to solve domain decomposition problems has been em-ployed in the past [9]. However, the implementation of Gaussianprocess emulators is relatively simple and flexible. In addition tothis, Gaussian process emulators have already been implementedin various scientific fields in order to alleviate the computationalburden of expensive simulators with encouraging results. Thesefields include climate prediction [10,11], environmental science[12], medicine [13–15], structural dynamics [16,17], reservoir fore-casting [18], hydrogeology [19], quality control [20], heat transfer[21], and reliability analysis [22], among others.
The paper is organized as follows. Section 2 introduces theconcepts of mutli-fidelity modeling in the context of finiteelement method. A brief overview of domain decomposition and

F.A. DiazDelaO, S. Adhikari / Computers and Structures 92–93 (2012) 206–215 207
metamodeling is given in Section 3. Section 4 discusses the theorybehind the Gaussian process emulation. Section 5 explains theproposed coupling between domain decomposition and Gaussianprocess emulators. Section 6 presents some numerical results ofthe proposed method applied to the deformation of a membraneon a domain with different geometries. Section 7 offers someconclusions based on the results obtained in the paper.
2. Multi-fidelity finite element modeling
Let X be a bounded domain in R2 with Lipschitz continuousboundary @X, that is, there exist a finite number of covering opensets O‘ such that, for every ‘; @X \ O‘ is the graph of a Lipschitzcontinuous function and X \ O‘ lies on one side of this graph. LetT h be a family of conforming meshes (triangles) which areshape-regular as the mesh size h ? 0. Consider the elliptic PDEwith the following Dirichlet boundary condition
�r½aðxÞruðxÞ� þ bðxÞuðxÞ ¼ /ðxÞ; x 2 X
uðxÞ ¼ 0; x 2 @X ð1Þ
The Hilbert space L2(X) and Sobolev space Hk(X) are respectivelyendowed with inner products ðu;vÞ ¼
RX uðxÞvðxÞdx and ðu;vÞk ¼R
X uðxÞvðxÞdxþR
Xdudx
� �dvdx
� �dxþ � � � þ
RX
dkudxk
� �dkvdxk
� �dx. The aim is to
obtain the function u : X! R which satisfies the conditions of prob-lem (1) for a given / : X! R.
Applying the standard finite element method [23,24], the PDE inproblem (1) can be expressed in the matrix form as
Ku ¼ f ð2Þ
where K 2 RN�N is the stiffness matrix, u 2 RN is the displacementvector and f 2 RN is the forcing vector. Note that N is the numberof degrees of freedom in the underlying finite element mesh.
Suppose Lf and Hf are two finite element models to solve prob-lem (1). Let n
ðLf Þe and n
ðHf Þe denote the number of elements in the fi-
nite element meshes of Lf and Hf induced by Eq. (2) and let NðLf Þ andNðHf Þ be the number of degrees of freedom. Let hðLf Þ and hðHf Þ be therespective element size. Also, let u⁄(x) and U⁄(x) be a solution to Lf
and Hf respectively, and let u(r) be the exact solution to (1). Thatway, ku(r)(x) � u⁄(x)k and ku(r)(x) � U⁄(x)k are the differences be-tween the exact solution and the solution to the models Lf andHf, with k�k being the Euclidean norm. We call Lf a low-fidelitymodel and Hf a high-fidelity model if the following inequalitieshold:
1. ku(r)(x) � u⁄(x)k > ku(r)(x) � U⁄(x)k (Accuracy)2. hðLf Þ > hðHf Þ (Resolution)3. NðLf Þ < NðHf Þ (number of degrees of freedom)4. n
ðLf Þe < n
ðHf Þe (number of elements)
It is important to note that the concepts of low and high fidelitybased on the above definition are relative. A single refinement of agiven low-fidelity mesh would imply a different increase in thefidelity of the model depending on the particular characteristicsof the problem at hand. A more accurate description of Lf and Hf
would therefore be ‘‘lower’’ and ‘‘higher’’ fidelity models respec-tively. Keeping this note in mind, the current low and high fidelityterminology is kept in the remainder of the paper. Also, note that inthe above definition it is implicitly assumed that both models Lf
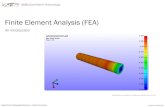
and Hf have same polynomial order p. A general hp finite elementmodel is beyond the scope of this paper (see for example [25]).Fig. 1 shows two finite element models on a D-shaped domain,each with a different fidelity level.
3. A brief overview of domain decomposition andmetamodeling
3.1. The domain decomposition method
Let X be partitioned in S subdomains {Xj:1 6 j 6 S}, such thatX ¼
SjXj. Suppose these domains are non-overlapping, that is
XjT
Xk = ;, "j – k. The interface is denoted by C, where
C ¼[i;j
ð@Xi \ @XjÞ n @X ð3Þ
In Fig. 2, the D-shaped domain X from Fig. 1 is partitioned into sub-domains X1 and X2. The interface C separates both subdomains.Fig. 3 shows the finite element mesh of the partitioned low-fidelitymodel Lf and the partitioned high-fidelity model Hf. In order to ob-tain the solution to these finite element models, it can be shown [1]that if X is the disjoint union of the subdomains X1, . . . ,XS, then thediscretised PDEs governing the system’s response can be recast asthe following partitioned linear system
K1 0 � � � 0 BT1
0 K2 � � � 0 BT2
..
. ... . .
. ... ..
.
0 0 � � � Kn BTS
B1 B2 � � � BS C
0BBBBBBB@
1CCCCCCCA
u1
u2
..
.
un
uc
0BBBBBBB@
1CCCCCCCA¼
f1
f2
..
.
fS
fc
0BBBBBBB@
1CCCCCCCA
ð4Þ
The solution of the partitioned linear system (4) is obtained by solv-ing the interface problem
C � B1K�11 B
T1 � � � � � BSK
�1S B
TS
� �uc
¼ fc � B1K�11 f1 � � � � � BSK�1
S fS ð5Þ
and then solving in parallel
u1 ¼ K�11 f1 � BT
1uc� �
..
.
uS ¼ K�1S fS � BT
S uc� �
ð6Þ
Fig. 4 shows the domain decomposition solution of problem (1) forHf and for the values a(x) = 1, b(x) = 0, and / = 1. The model repre-sents the deformation of a membrane in the domain X.
The main problem with solving a finite element model usingdomain decomposition is that the Schur complement matrix
R ¼ C � B1K�11 B
T1 � � � � � BSK
�1S B
TS ð7Þ
is numerically expensive to obtain. Hence, solving the linear system(5) is likely to become a bottleneck of the domain decomposition strat-egy for a high-fidelity model Hf. A metamodeling approach is thereforeproposed, whereby the solution to the interface problem (5) is approx-imated using only a few evaluations of a lower-fidelity model Lf.
3.2. Metamodeling approach
Let u�ðxÞ : X � R2 ! R be a finite element solution to problem(1). If x = (x,y) and u⁄(x) = z, then u⁄ is a function that maps(x,y) ´ z. Adopting this notation, a level set of the domain X withrespect to the x-axis is defined as
LxðcÞ ¼ fzju�ðc; yÞ ¼ z; c 2 Rg ð8Þ
and analogously for a level set with respect to the y-axis
LyðdÞ ¼ fzju�ðx; dÞ ¼ z; d 2 Rg ð9Þ
For nx;ny 2 Zþ, let K denote
K ¼ fLxðciÞ;LyðdjÞj1 6 i 6 nx;1 6 j 6 nyg ð10Þ

0 0.5 1
0
0.5
1
Length (m)
Wid
th (
m)
Low−fidelity
(a) Low-fidelity model Lf
0 0.5 1
0
0.5
1
Length (m)
Wid
th (
m)
High−fidelity
(b) High-fidelity model Hf
Fig. 1. Low and high-fidelity finite element models on the domain X.
0 0.5 1
0
0.5
1
Length (m)
Wid
th (
m)
Ω
Ω1 Ω2
Γ→
∂Ω2
∂Ω1
Fig. 2. Domain decomposition of X into the subdomains X1 and X2. The borders ofeach subdomain are @X1 and @X2 respectively. The interface C separates thesubdomains.
208 F.A. DiazDelaO, S. Adhikari / Computers and Structures 92–93 (2012) 206–215
that is, the family of level sets with respect to x and with respect toy on X, determined by every number in C ¼ fci;dj 2 Rj1 6i 6 nx;1 6 j 6 nyg. Let Cx(ci) and Cy(dj) be the preimages of everyLxðciÞ;LyðdjÞ 2 K, that is
CxðciÞ ¼ fy 2 Rju�ðci; yÞ ¼ zg ð11ÞCyðdjÞ ¼ fx 2 Rju�ðx;djÞ ¼ zg ð12Þ
Notice that u�ðxÞ : R2 ! R, whilst CxðciÞ# LxðciÞ and CyðdjÞ# LyðdjÞare both mappings of the form gx
i : R! R and gyj : R! R. Moreover,
for every ci;dj 2 C, the set of points defined byS
ijfLxðciÞ
SLyðdjÞg is
the solution of the two-dimensional interface problem (5) when-ever the interface between any two subdomains is parallel to anyof the axis x and/or y. As mentioned before, this solution is the im-age of the mappings inH ¼ gx
i ð�Þ;gyj ð�Þ���1 6 i 6 nx;1 6 j 6 ny
n o. Note
that the requirement of the interfaces being parallel to the coordi-nate axes is not a necessary condition: they could all be definedas rotations of elements in LxðciÞ. The definitions followed hereare given without loss of generality and help illustrate the method-ology proposed. Additionally, the requirement of the interfacesbeing straight lines might seem restrictive, as it is not always thecase that a domain can be decomposed in this way. However, thereexist cases for which prescribed straight line interfaces can bemeaningful for modelling physical phenomena. In particular, theycan be useful for solving contact problems [35,37,36], wherebytwo bodies X1 and X2 are bonded along their interface by a thinadhesive layer. Additionally, there are several examples in the liter-ature in which theoretical work has been done assuming straightline interfaces [40,39] or segments of straight line interfaces [38].There also exist domain decomposition methods for parabolic PDEsin which the interfaces are parallel lines. To overcome the disadvan-tage of data communication, some perturbations to the interfacescan be introduced [41]. However, they still contain segments ofstraight lines in which the proposed method could be applicable.
In order to reduce the computational cost of the interface prob-lem, this paper proposes a statistical approximation to the map-pings in H using Gaussian process emulators. The main idea isthat the level sets defined by every interface problem in a low-fidelity finite element model can be emulated in order to approxi-mate the interface problem in a corresponding high-fidelity finiteelement model. Without loss of generality, suppose that n designpoints x1, . . . ,xn are chosen in the input domain of any mappinggð�Þ 2 H (referred to as a simulator in the remainder of the paper).The set {g(x1), . . . ,g(xn)}, resulting from the evaluation of g(�) ineach of the design points, is called training set. Following [26], aGaussian process emulator should satisfy some minimal criteria:
1. Since by definition the output at each design point is known,the emulator should reproduce this output with no uncertainty.
2. At any x that is not a design point, the probability distributionprovided by the emulator should produce a mean value thatconstitutes a plausible interpolation/extrapolation of the train-ing data. The probability distribution around this predictivemean should also express the uncertainty about how the emu-lator might interpolate/extrapolate.

0 0.5 1
0
0.5
1
Length (m)
Wid
th (
m)
(a) Low-fidelity model Lf
0 0.5 1
0
0.5
1
Length (m)
Wid
th (
m)
(b) High-fidelity model Hf
Fig. 3. The finite element mesh of the low and high-fidelity finite element models on the domain X, which is decomposed into the subdomains X1 and X2.
Fig. 4. Domain decomposition solution of the high-fidelity finite element model Hf.
F.A. DiazDelaO, S. Adhikari / Computers and Structures 92–93 (2012) 206–215 209
In addition to these criteria, the key feature of a Gaussian pro-cess emulator is that it quantifies the uncertainty that arises fromhaving a training set with limited size [27].
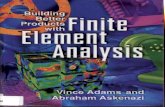
To illustrate the above criteria, take a one-dimensional simula-tor and suppose it is computationally intensive. Fig. 5(a) depictsthe case when eight training runs (the circles) are used. The meanof the distribution provided by the emulator (the dots) approxi-mates the output of the simulator (the solid line) at several untriedinputs across the input domain. As required, it returns the knownvalue of the simulator at each training run. Fig. 5(b) shows upperand lower bounds of two standard deviations for the predictivemean of the emulator. Note how uncertainty is equal to zero ineach of the training runs, as it would be expected, since the emu-lator reproduces output of the simulator at these points.
4. Brief overview of Gaussian process emulators
Let g(�) be an expensive simulator, such that the cost of runningg(�) makes it is practical to evaluate it only at a limited number of
points in its domain. The uncertainty about the output of g(�) canbe described through a probability distribution [28]. A Bayesiantreatment is followed here, whereby prior beliefs about the rela-tionship between the input and the unknown output are condi-tioned on a set of evaluations of g(�), thus combining subjectiveand objective information. Begin by assuming that g(�) admitsthe following stochastic representation
gð�Þ ¼ hð�ÞTbþ Zð�Þ ð13Þ
where h(�) is a vector of known functions and b is a vector of un-known coefficients. Some authors [14,29] note that h(�) should bechosen to reflect the available information about the functionalform of g(�). This is currently an area of active research. The functionZ(�) is a stochastic process with mean zero and covariance functionCov(�, �). Let y = [g(x1), . . . ,g(xn)]T be a vector of observations corre-sponding to the design points x1, . . . ,xn. These observations are usedto update the prior distribution of the simulator. An analyticallyconvenient choice for such prior is the following Gaussian processdistribution [13]
gð�Þjb;r2 � Nðhð�ÞTb;r2Cð�; �ÞÞ ð14Þ
where h(�) and b are defined as above.
Definition (Gaussian stochastic process). Let x 2 RN . Then Z(�) is aGaussian stochastic process if for any n P 1 and any choice{x1, . . . ,xn}, the vector [Z(x1), . . . ,Z(xn)]T has a multivariate normaldistribution.
In order to choose a valid correlation function C(�, �), someauthors [30] consider correlation functions that are products of onedimensional correlations, specifically functions of the form
Cðx;x0Þ ¼Yn
i¼1
exp �bijxi � x0ijc� �
ð15Þ
where bi > 0 for all i; c 2 Rþ. One advantage of this type of correla-tion functions is that multidimensional integrals can be simplifiedas products of one-dimensional integrals. Moreover, if c = 2, the cor-relation function is infinitely differentiable. This feature is conve-nient when Gaussian processes are used to model not only thesimulator g(�), but also its derivatives [31]. For these reasons, a pop-ular choice of correlation function is

Fig. 5. Approximation to the simulator y = 0.5x � xsin(x) with the mean of a Gaussian process emulator and uncertainty (2 standard deviations) about this mean; (-): outputof the simulator, (o): training runs, (� � �): emulator’s predictive mean.
210 F.A. DiazDelaO, S. Adhikari / Computers and Structures 92–93 (2012) 206–215
Cðx;x0Þ ¼ expf�ðx� x0ÞTBðx� x0Þg ð16Þ
where B is a diagonal positive definite matrix. The diagonal of B is avector b 2 Rn
þ of smoothness parameters. These parameters quan-tify the rate at which the output varies as any x varies. One availabletechnique to estimate the smoothness parameters is to derive thedensity function f(Bjy) and obtain a maximum likelihood estimatorof b. It can be shown [32] that this density function is of the form
f ðBjyÞ / ðr̂2Þ�ðn�qÞ
2 jAj�12jHTAHj�
12 ð17Þ
where the terms r2, q, A, and H are all defined below.After conditioning on the training runs and updating the prior
distribution (14), the mean of the resulting posterior distributionapproximates the output of g(�) at any untried x, whereas itreproduces the known output at each design point. The variance ofthe posterior distribution quantifies the uncertainty that arisesfrom having only a limited number of evaluations of g(�) [11]. Veryconveniently, the posterior is also a Gaussian process distribution,obtained as follows: Let H = [h(x1), . . . ,h(xn)]T, and A 2 Rn�n suchthat Ai j = C(xi,xj)"i, j 2 {1, . . . ,n}. Then
yjb;r2 � NðHb;r2AÞ ð18Þ
To incorporate the information y and obtain the distribution ofg(�)jy, use the following result [33].
Theorem 1. Let z 2 RN be a random vector such that z � Nðl;RÞ.Partition z as (z1,z2)T, where z1 2 RN�n and z2 2 Rn. Consequently,partition l = (l1,l2)T and R ¼ R11 R12
R21 R22
, so that E[zj] = lj and
Cov(zj,zk) = Rjk. Then, z1jz2 � Nð~l; eRÞ, where~l ¼ l1 þ R12R
�122 ðz2 � l2Þ and eR ¼ R11 � R12R
�122 R21.
It follows that
gð�Þjy;b;r2 � Nðm�ð�Þ;r2C�ð�; �ÞÞ ð19Þ
where
m�ðxÞ ¼ hðxÞTbþ tðxÞA�1ðy �HbÞ ð20ÞC�ðx;x0Þ ¼ Cðx;x0Þ � tðxÞTA�1tðx0Þ ð21ÞtðxÞ ¼ ½Cðx;x1Þ; . . . ;Cðx;xnÞ�T ð22Þ
Removing the conditioning on b using standard integrationtechniques [13], obtain the posterior distribution
gð�Þjy;r2 � Nðm��ð�Þ;r2C��ð�; �ÞÞ ð23Þ
where
m��ðxÞ¼hðxÞTb̂þ tðxÞA�1ðy�Hb̂Þ ð24Þ
C��ðx;x0Þ ¼C�ðx;x0Þþ ðhðxÞT� tðxÞTA�1HÞðHTA�1HÞ�1ðhðx0ÞT� tðx0ÞTA�1HÞT ð25Þ
b̂¼ðHTA�1HÞ�1HTA�1y ð26Þ
To estimate r in Eq. (23), let q be the rank of H. Then
r̂2 ¼ yTðA�1 � A�1HðHTA�1HÞHTA�1Þyn� q� 2
ð27Þ
As it can be seen, Gaussian process emulation consists in updatingthe prior distribution (14), which contains subjective information,by adding the objective information y in order to obtain the poster-ior distribution (23). This enables the calculation of the predictivemean m⁄⁄(�) given the data y. Since m⁄⁄(�) does not include any terminvolving the expensive simulator g(�), it is a fast approximation ofg(x) for any x in its domain. The conditioning on r2 can also beeliminated, such that
gðxÞ �m��ðxÞ
r̂ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðn�q�2ÞC��ðxÞ
n�q
q � tn�q ð28Þ
which is a Student’s t-distribution with n � q degrees of freedom(not to be confused with the degrees of freedom in a finite elementmethod context). The complete process is summarized in Alg. 1.
Alg. 1: Gaussian process emulation
Input: Design points x1, . . . ,xn
Output: Predictive mean m⁄⁄(�)begin
1. Select n design points x1, . . . ,xn
2. Obtain the vector of observations y = [g(x1), . . . ,g(xn)]T
3. Update the prior distribution (14) using y and obtain theposterior distribution (23)
4. Compute the predictive mean m⁄⁄(x) = E[g(x)jy] for anyuntried x
end

−5 −4 −3 −2 −1 0 1 2 3 4 5−4
−2
0
2
4
6
8
Simulator Input, x
Sim
ulat
or O
utpu
t, y
GPEHermiteLagrange
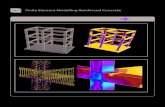
Fig. 6. Comparison of Gaussian process emulation against Hermite and Lagrangeinterpolation for 8 training runs of the simulator y = 0.5x � xsin(x). The solid line is
F.A. DiazDelaO, S. Adhikari / Computers and Structures 92–93 (2012) 206–215 211
A natural question that may arise is the comparison of Gaussian
process emulation against other interpolation methods. Fig. 6 com-pares the GPE approximation to the simulator y = 0.5x � xsin(x)with the Lagrange and Hermite interpolation. Regarding their cost,note that the computational load in the GPE algorithm is in theinversion of the correlation matrix Aij = C(xi,xj) defined in Eq.(18). In practice, this matrix is not inverted, but decomposed intwo triangular matrices by Cholesky decomposition. This operationhas a cost of Oðn3Þ. In comparison, Lagrange interpolation requiresthe solution of a linear system with a Vandermonde matrix, whichalso bears a cost of Oðn3Þ. Alternative approaches exist, wherebythe solution requires Oðn2Þ operations [43]. On the other hand,Hermite interpolation requires the solution of a tridiagonal system,with a cost of OðnÞ. However, this method requires the derivativesof the interpolating polynomial and the function being interpo-lated to coincide in the endpoints. In order for this condition tohold, it is necessary to have either the values of the derivative atthe endpoints or an accurate approximation to those values [44].the output of the simulator.
0 0.5 1
0
0.5
1
Length (m)
Wid
th (
m)
(a) Low-fidelity model Lf
Fig. 7. The finite element mesh of the low and high-fidelity finite element models on theon Hf are defined by the triangulation of Lf and therefore lie on the interface C.
From a statistical point of view, an advantage of using Gaussianprocesses over classical methods is the following: Suppose it is notpossible to produce simulator runs y = g(x) but only noisy versionsthereof y = g(x) + �, with � being random noise with variance r2
n.Then, the covariance function C(�, �) becomes Cð�; �Þ þ dijr2
n , wheredij is the Kronecker delta. In that case, the Gaussian process emula-tor becomes a regression rather than an interpolation (by fitting acurve through the noisy data)[42]. This is convenient if statistics ofthe simulator’s output (e.g. mean, variance, percentiles) are to beestimated.
5. The unification of Gaussian process emulation and domaindecomposition
Let u�ðxÞ : X! R be a finite element solution to the problem (1)for a low-fidelity finite element model Lf. Suppose that the solutionU�ðxÞ : X! R of a high-fidelity model Hf is to be obtained via do-main decomposition. Assume the finite element mesh of Hf to bea refinement of the mesh of Lf. If a Delaunay triangulation is as-sumed for these meshes, it can be proved [34] thatNðLf Þ � N ðHf Þ, where NðLf Þ and NðHf Þ are the low and high-fidel-ity sets of nodes respectively. After being partitioned in subdo-mains, suppose the domain X contains nx level sets with respectto the x-axis and ny level sets with respect to the y-axis. As dis-cussed in Section 3, a total of nx + ny simulators of the formgx
i ð�Þ : CxðciÞ ! LxðciÞ and gyj ð�Þ : CyðdjÞ ! LyðdjÞ can be specified
for u⁄(x).Notice that, since NðLf Þ � N ðHf Þ, the sets NðHf Þ \ CxðciÞ and
NðHf Þ \ CyðdjÞ can be regarded as design points upon which Gauss-ian process emulators can be built in order to infer the output ofeach simulator gx
i ð�Þ and gyj ð�Þ. That way, all the values of U⁄(x) that
solve the interface problem for Hf would be approximated by theemulator. The examples presented in the following section willhelp clarify this point.
6. Numerical examples
6.1. A case of 2 subdomains
The model of the deforming membrane presented in Section 3was considered. The low-fidelity mesh consisted of 145 nodes,
0 0.5 1
0
0.5
1
Length (m)
Wid
th (
m)
(b) High-fidelity model Hf
domain X, which is decomposed into the subdomains X1 and X2. The design points

Fig. 9. Solution of the high-fidelity finite element model Hf. The blue dots representthe training runs obtained from the level set Lxð0:5Þ from the low-fidelity model Lf.The interface problem for Hf was approximated by a Gaussian process emulator.(For interpretation of the references to colour in this figure legend, the reader isreferred to the web version of this article.)
212 F.A. DiazDelaO, S. Adhikari / Computers and Structures 92–93 (2012) 206–215
whereas a refinement yielded a high-fidelity mesh with 2113 nodes.The level set Lxð0:5Þ for Lf was determined by solving the interfaceproblem, by means of Eq. (5). The set NðHf Þ \ Cxð0:5Þ determinedthe design points upon which to build the Gaussian process emula-tor to approximate the solution to the interface problem for Hf. Fig. 7illustrates how these design points are assimilated from Lf to Hf.Fig. 8 shows the simulator defined by gx : Cxð0:5Þ ! Lxð0:5Þ. It alsoshows the approximation to Lxð0:5Þ provided by the predictivemean of the Gaussian process emulator, as well as probabilitybounds of 2 standard deviations about this mean.
Once the solution of the interface problem for Hf was emulated,the approximate solution for the subdomains X1 and X2 was ob-tained in parallel by solving the system of equations (6). Fig. 9shows the approximate solution to Hf for all the nodes in thehigh-fidelity mesh. The training runs obtained from the level setLxð0:5Þ, which were calculated by solving the low-fidelity modelLf, are also shown.
The computational advantage of the proposed approach can beappreciated by noting that 13 nodes lie in the interface of Lf. Thus,the cost of solving the interface problem for Lf was Oð133Þ, corre-sponding to the cost of solving the linear system (5). The refine-ment of the Delaunay triangulation led to an increase of 4 timesthe number of nodes on the interface, which implied a cost ofOð43 � 133Þ. In order to compare the approximate solution of Hf,denoted by eU�ðxÞ, with the domain decomposition solution U⁄(x)the absolute difference jeU�ðxÞ � U�ðxÞj was computed for everynode. By definition, the maximum difference over all the nodes isthe infinity norm keU�ðxÞ � U�ðxÞk1, which for this case had a mag-nitude of 8.12 � 10�4. The contour defined by this comparison isshown in Fig. 10. By construction, the difference in every designpoint is equal to 0. The same is true for the boundary, given theboundary conditions of problem (1).
6.2. A case of two non-convex subdomains
An interesting case arises when the domain X or any of its sub-domains is not convex. As a reminder, a set X is convex if for anypair of points x1 and x2 2X, the point kx1 + (1 � k)x2 2X for allk 2 [0,1]. Consider the domain shown in Fig. 11. X is clearly non-convex in R2, as it is trivial to construct a segment that connectstwo points belonging to the domain such that part of the segmentdoes not belong to it. Due to this, the level set Lxð0:5Þ has a preim-age Cx(0.5) which is non-convex in R, namely
Fig. 8. Approximation to the level set Lxð0:5Þ of Hf with the mean of a Gaussianprocess emulator and uncertainty (2 standard deviations) about this mean; (o):training runs, (� � �): emulator’s predictive mean.
Fig. 10. Absolute value of the difference between the domain decompositionsolution of Hf, denoted by U⁄(x), and the solution with the proposed method,denoted by eU�ðxÞ. By definition, the maximum of this difference for all nodes iskeU�ðxÞ � U�ðxÞk1 ’ 8:12� 10�4.
Cxð0:5Þ¼fy2Rju�ð0:5;yÞ¼ zg¼fy2Rju�ð0:5;yÞ¼ z;06 y60:25g[fy2Rju�ð0:5;yÞ¼ z;0:756 y61g¼Cx
1ð0:5Þ[Cx2ð0:5Þ
ð29Þ
Hence, in order to approximate Lxð0:5Þ, two Gaussian process emu-lators were built, taking the respective design points fromNðHf Þ \ Cx
1ð0:5Þ and NðHf Þ \ Cx2ð0:5Þ. The proposed method could
then be applied as previously. The result of doing this can be seenin Fig. 12. Note that for the sake of brevity, figures with the predic-tive means of the emulators, as well as the uncertainty bounds areomitted. However, they resemble the parabolic curve in Fig. 8.
For this case, the low-fidelity mesh consisted of 532 nodes,whereas a refinement yielded a high-fidelity mesh with 2008nodes. The refinement of Lf into Hf yielded two nodes per designpoint per preimage, such that the computational cost of solvingeach interface problem for Lf and obtaining the training runs was

0 0.2 0.4 0.6 0.8 1
0
0.2
0.4
0.6
0.8
1
Length (m)
Wid
th (
m)
(a) Low-fidelity model Lf
0 0.2 0.4 0.6 0.8 1
0
0.2
0.4
0.6
0.8
1
Length (m)
Wid
th (
m)
(b) High-fidelity model Hf
Fig. 11. The finite element mesh of the low and high-fidelity finite element models on the non-convex domain X, which is decomposed into the subdomains X1 and X2. Theset of design points lies on a non-convex interface.
Fig. 12. Solution of the high-fidelity finite element model Hf. The blue dotsrepresent the training runs obtained from the level set Lxð0:5Þ from the low-fidelitymodel Lf. The interface problem for Hf was approximated by two Gaussian processemulators, due to the non-convexity of the domain X. (For interpretation of thereferences to colour in this figure legend, the reader is referred to the web version ofthis article.)
Fig. 13. Absolute value of the difference between the domain decompositionsolution of Hf, denoted by U⁄(x), and the solution with the proposed method,denoted by eU�ðxÞ. By definition, the maximum of this difference for all nodes iskeU�ðxÞ � U�ðxÞk1 ’ 3:8� 10�5.
F.A. DiazDelaO, S. Adhikari / Computers and Structures 92–93 (2012) 206–215 213
2�Oð73Þ as opposed to 2�Oð23 � 73Þ. The node-to-node compar-ison yielded a maximum difference of keU�ðxÞ � U�ðxÞk1 ¼3:80� 10�5. The corresponding contour is shown in Fig. 13.
6.3. A case of three subdomains
In this example, the proposed method is tested assuming a do-main X that is partitioned into three subdomains. This partitioning
determined two interfaces, whose intersection with the corre-sponding nodes produced two level sets, Lxð0:5Þ and Lyð0:5Þ. TheL-shaped domain X, as well as the low and high-fidelity meshesand the interfaces defining the design points are all depicted inFig. 14. In this example, the low-fidelity mesh consisted of 150nodes, whereas a refinement yielded a high-fidelity mesh with557 nodes.
The simulators gx : Cxð0:5Þ ! Lxð0:5Þ and gy : Cyð0:5Þ ! Lyð0:5Þwere emulated running two Gaussian process emulators. The solu-tion for the subdomains X1, X2, and X3 was obtained in parallelfollowing Eq. (6). The solution is shown in Fig. 15. Note that therefinement of Lf into Hf yielded again two nodes per design pointon each interface, such that the computational cost of solving eachinterface problem for Lf and obtaining the training runs was Oð83Þas opposed to Oð23 � 83Þ. Finally, The node-to-node comparison

0 0.5 1
0
0.5
1
Length (m)
Wid
th (
m)
(a) Low-fidelity model Lf
0 0.5 1
0
0.5
1
Length (m)
Wid
th (
m)
(b) High-fidelity model Hf
Fig. 14. The finite element mesh of a low fidelity model on an L-shaped domain X, decomposed in three subdomains X1, X2, and X3, thus inducing two interface problems.
Fig. 15. Solution of the high-fidelity finite element model Hf. The blue dotsrepresent the training runs obtained from the level sets Lxð0:5Þ and Lyð0:5Þ fromthe low-fidelity model Lf. The interface problems for Hf was approximated byGaussian process emulators. (For interpretation of the references to colour in thisfigure legend, the reader is referred to the web version of this article.)
Fig. 16. Absolute value of the difference between the domain decompositionsolution of Hf, denoted by U⁄(x), and the solution with the proposed method,denoted by eU�ðxÞ. By definition, the maximum of this difference for all nodes iskeU�ðxÞ � U�ðxÞk1 ’ 5:71� 10�3.
214 F.A. DiazDelaO, S. Adhikari / Computers and Structures 92–93 (2012) 206–215
yielded a maximum difference of keU�ðxÞ � U�ðxÞk1 ¼ 5:71� 10�3.The resulting contour is shown in Fig. 16.
7. Conclusions
A Bayesian method based on Gaussian process emulators tosolve boundary value problems in the context of domain decom-position was proposed. The method can assimilate a low-fidelityfinite element model with a computationally more expensivehigh-fidelity model, given that the solution of the governingelliptic PDE is sufficiently smooth. The solution of the interfaceproblem of the low-fidelity model was shown to provide withthe training runs upon which the emulators can be built in orderto approximate the more expensive solution of the interfaceproblem of a corresponding high-fidelity model. That way, thecomputational cost of the domain decomposition solution of thehigh-fidelity model was reduced. A good agreement between
the proposed approximation and the direct domain decomposi-tion solution was found for different geometries of the domain.It was shown that neither the domain, or even the partitioningsubdomains, need to be convex. Future work will include theextension of the method to stochastic partial differentialequations. A rigorous analytical error analysis should also be con-sidered for future investigations.
Acknowledgments
FADO gratefully acknowledges the support of the Engineeringand Physical Sciences Research Council (EPSRC) for the award ofa studentship through an Ideas Factory grant and the Consejo Nac-ional de Ciencia y Tecnología (CONACYT) for the award of a schol-arship from the Mexican Government. SA gratefully acknowledges

F.A. DiazDelaO, S. Adhikari / Computers and Structures 92–93 (2012) 206–215 215
the support of the Royal Society through the award of Wolfson Re-search Merit award.
References
[1] Toselli A, Windlund O. Domain decomposition methods algorithms andtheory. Berlin: Springer Series in Computational Mathematics; 2005.
[2] Rao ARM, Rao TVSRA, Dattaguru B. A new parallel overlapped domaindecomposition method for nonlinear dynamic finite element analysis.Comput Struct 2003;81(26-27):2441–54.
[3] Gallimard L, Sassi T. A posteriori error analysis of a domain decompositionalgorithm for unilateral contact problem. Comput Struct 2010;88(13-14):879–88.
[4] Guibert D, Tromeur-Dervout D. Parallel adaptive time domain decompositionfor stiff systems of ODEs/DAEs. Comput Struct. 2007;85(9):553–62.
[5] Bendali A, Boubendir Y, Fares M. A FETI-like domain decomposition method forcoupling finite elements and boundary elements in large-size problems ofacoustic scattering. Comput Struct 2007;85(9):526–35.
[6] Sarkar A, Benabbou N, Ghanem R. Domain decomposition of stochastic PDEs:Theoretical formulations. Int J Numer Methods Eng 2009;77(5):689–701.
[7] Cliffe KA, Graham IG, Scheichl R, Stals L. Parallel computation of flow inheterogeneous media modelled by mixed finite elements. J Comput Phys2000;164(2):258–82.
[8] Kennedy MC, O’Hagan A. Bayesian calibration of computer models. J RoyalStatist Soc Ser B Statist Method 2001;63(3):425–50.
[9] Peirano E, Talay D. Domain decomposition in science and engineering. In:Fourteenth International Conference on Domain Decomposition Methods,National Autonomous University of Mexico (UNAM), Mexico City, Mexico,Chapter Domain decomposition by stochastic methods, 2003. pp. 131–147.
[10] Challenor P, Hankin R, Marsh R. Avoiding dangerous climatechange. Cambridge, UK: Cambridge University Press; 2006. ChapterAchieving robust design from computer simulations, pp. 55–63.
[11] Rougier J. Probabilistic inference for future climate using an ensemble ofclimate model evaluations. Climatic Change 2007;81(3):247–64.
[12] Kennedy MC, Anderson CW, Conti S, O’Hagan A. Case studies in Gaussianprocess modelling of computer codes. Reliab Eng Syst Safety 2006;91(10-11):1301–9.
[13] Haylock R, O’Hagan A. Bayesian statistics, vol. 5. Oxford, UK: Oxford UniversityPress; 1996. Chapter On inference for outputs of computationally expensivealgorithms with uncertainty on the inputs.
[14] Oakley JE, O’Hagan A. Probabilistic sensitivity analysis of complex models: aBayesian approach. J Roy Stat Soc B 2004;66(3):751–69.
[15] Kolachalama V, Bressloff N, Nair P. Mining data from hemodynamicsimulations via Bayesian emulation. BioMed Eng 2007;6(47).
[16] DiazDelaO FA, Adhikari S. Structural dynamic analysis using Gaussian processemulators. Eng Comput 2010;27(5):580–605.
[17] DiazDelaO FA, Adhikari S. Gaussian process emulators for the stochastic finiteelement method. Int J Numer Methods Eng 2011;87(6):521–40.
[18] Busby D, Hierarchical adaptive experimental design for Gaussian processemulators. Reliab Eng Syst Safety 2009;94(7):1183–1193 [special issue onSensitivity Analysis].
[19] Marrel A, Iooss B, Laurent B, Roustant O. Calculations of Sobol indices for theGaussian process metamodel. Reliab Eng Syst Safety 2009;94(3):742–51.
[20] Bates R, Kennet R, Steinberg D, Wynn H. Achieving robust design fromcomputer simulations. Q Tech Quant Manag 2006;3(2):161–77.
[21] McFarland J, Mahadevan S. Multivariate significance testing and modelcalibration under uncertainty. Comput Methods Appl Mech Eng2008;197(29-32):2467–79.
[22] Daneshkhah A, Bedford T. Advances in mathematical modeling forreliability. The Netherlands: IOS Press; 2008. Chapter Sensitivity analysis ofa reliability system using Gaussian processes, pp. 46–62.
[23] Bathe KJ. Finite element procedures. Englewood Cliffs, New Jersey,USA: Prentice Hall Inc.; 1995.
[24] Petyt M. Introduction to finite element vibration analysis. Cambridge,UK: Cambridge University Press; 1998.
[25] Babuška I, Suri M. The p- and h-p versions of the finite element method, anoverview. Comput Methods Appl Mech Eng 1990;80(1-3):5–26.
[26] O’Hagan A. Bayesian analysis of computer code outputs: a tutorial. Reliab EngSyst Safety 2006;91(10-11):1290–300.
[27] Rougier J, Sexton D, Murphy M, Stainforth D. Emulating the sensitivity of theHadSM3 climate model using ensembles from different but relatedexperiments. Technical Report 07/04, MUCM, University of Sheffield,Sheffield, UK, 2007.
[28] Oakley J. Eliciting Gaussian process priors for complex computer codes. TheStatist 2002;51(1):81–97.
[29] Oakley J. Estimating percentiles of computer code outputs. Appl Statist2004;53:83–93.
[30] Sacks J, Welch W, Mitchell T, Wynn H. Design and analysis of computerexperiments. Statist Sci 1989;4(4):409–35.
[31] O’Hagan A. Bayesian statistics, vol. 4. Cambridge, UK: Oxford University Press;1992. Chapter Some Bayesian numerical analysis, pp. 345–363.
[32] Haylock R. Bayesian inference about outputs of computationally expensivealgorithms with uncertainty on the inputs, Ph.D. thesis, University ofNottingham, Nottingham, UK 1996.
[33] Krzanowski W. Principles of multivariate analysis. Oxford, UK: OxfordUniversity Press; 2000.
[34] George P. Automatic mesh generation: application to finite elementmethods. New York: Wiley; 1991.
[35] Geymonat G, Krasucki F, Marini D, Vidrascu M. A domain decompositionmethod for a bonded structure. Math Models Methods Appl Sci 1998;8(8):1387–402.
[36] Koko J. Convergence analysis of optimization-based domain decompositionmethods for a bonded structure. Appl Numer Math 2008;58(1):69–87.
[37] Krasucki F, Mnch A, Ousset Y. Numerical simulation of debonding ofadhesively bonded joint. Int J Solids Struct 2002;39(26):6355–83.
[38] Lui SH. A Lions non-overlapping domain decomposition method for domainswith an arbitrary interface. IMA J Numer Anal 2009;29(2):332–49.
[39] Haase G, Kuhn M. Preprocessing for 2D FE-BE domain decomposition methods.Comput Visual Sci 1999;2:25–35.
[40] Funaro D, Quarteroni A, Zanolli P. An iterative procedure with interfacerelaxation for domain decomposition methods. SIAM J Numer Anal1988;25(6):1213–36.
[41] Liao H, Shi H, Sun Z. Corrected explicit-implicit domain decompositionalgorithms for two-dimensional semilinear parabolic equations. Sci ChinaSer A Math 2009;52(11):2362–88.
[42] Rasmussen CE, Williams C. Gaussian processes for machinelearning. Massachusetts Institute of Technology: the MIT Press; 2006.
[43] Van Loan CE. Introduction to scientific computing: a matrix-vector approachusing MATLAB. Prentice Hall PTR; 1999.
[44] Burden RL, Faires JD. Numerical analysis. Brooks/Cole Publishing Company;2000.