BASICS - McMaster Universityoptlab.mcmaster.ca/~yzinchen/CES701_07/COMPENG701_2.pdfComputer...
39
BASICS
Transcript of BASICS - McMaster Universityoptlab.mcmaster.ca/~yzinchen/CES701_07/COMPENG701_2.pdfComputer...

BASICS

Hardware components

Computer Architecture
• Computer Organization
– The von Neumann architecture
– Same storage device for both instructions and data
– Processor components
• Arithmetic Logic Unit
• Control Unit
• Registers
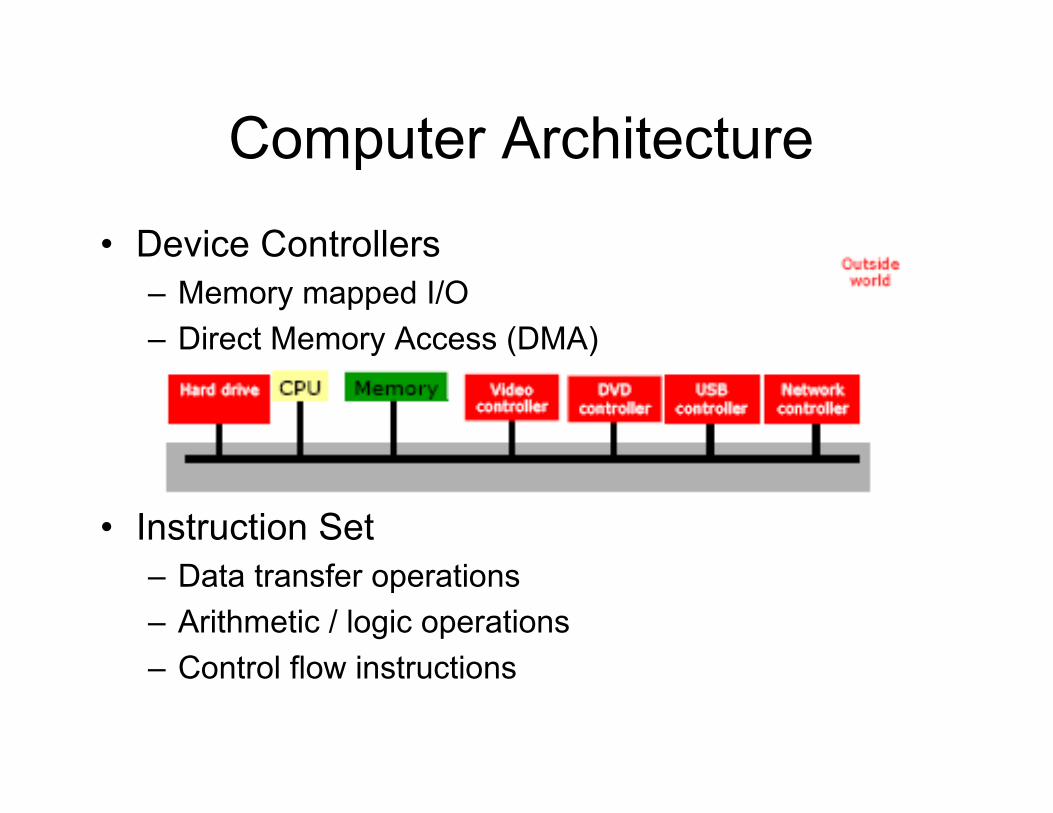
Computer Architecture
• Device Controllers
– Memory mapped I/O
– Direct Memory Access (DMA)
• Instruction Set
– Data transfer operations
– Arithmetic / logic operations
– Control flow instructions
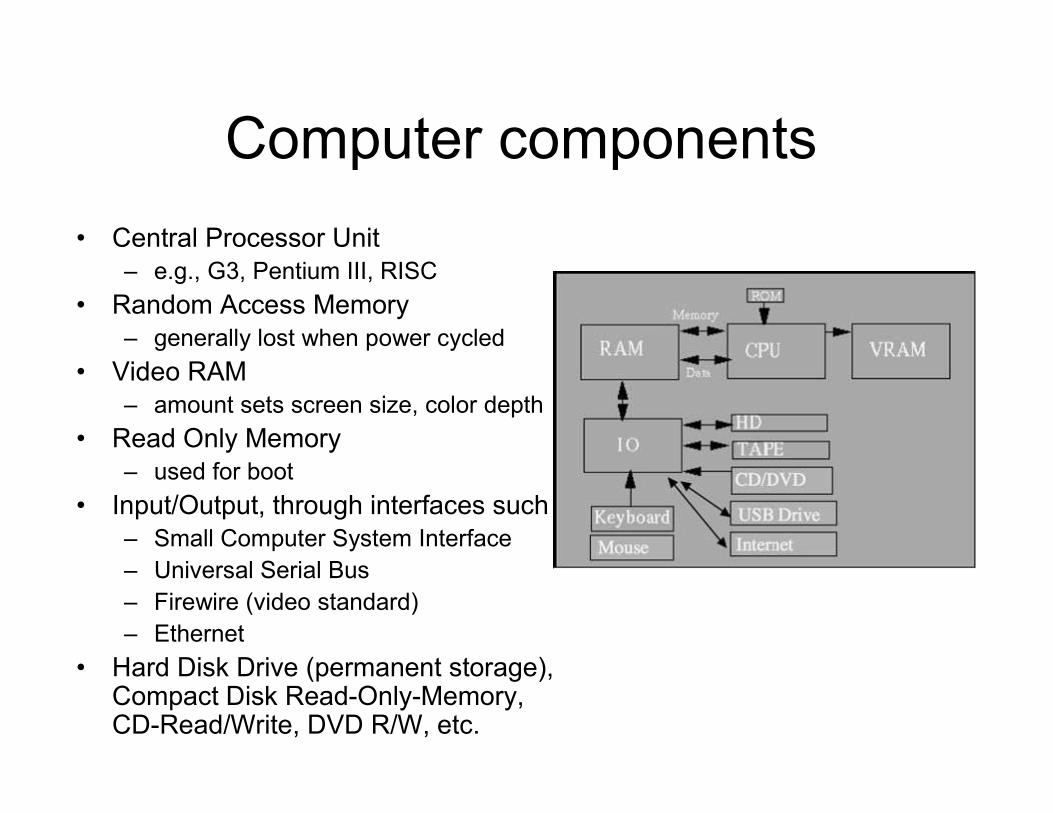
Computer components
• Central Processor Unit
– e.g., G3, Pentium III, RISC
• Random Access Memory
– generally lost when power cycled
• Video RAM
– amount sets screen size, color depth
• Read Only Memory
– used for boot
• Input/Output, through interfaces such as
– Small Computer System Interface
– Universal Serial Bus
– Firewire (video standard)
– Ethernet
• Hard Disk Drive (permanent storage), Compact Disk Read-Only-Memory, CD-Read/Write, DVD R/W, etc.
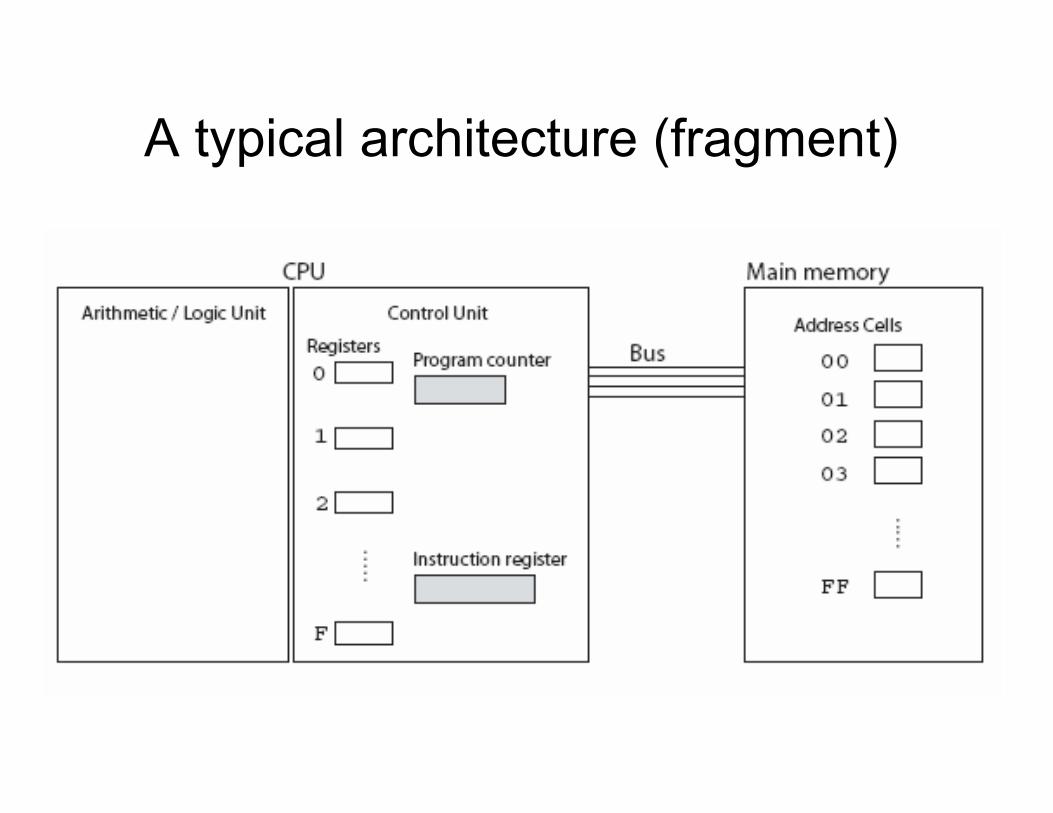
A typical architecture (fragment)
CPU basics
• Smallest thing a computer knows– a bit 0 or 1 (false/true)
• CPU knows how to perform and, or, xor(exclusive or) operations– And returns true if both same
– Or returns true if either true
– Xor returns true if different
• CPU is a massive collection of and and or gates
• A specific CPU has a set of instructions it can execute (usually 50-100, machine language)
CPU basics
• Number of instructions per seconds is set by the “clock speed”– e.g., 500 MHz Pentium III
• One clock tick is called a cycle– modern CPUs can often execute >1 instruction per cycle
• Programs are set of instructions to be executed by the CPU– compilers/linkers or interpreters do this for you
• Floating point speed is measured in floating point operations per seconds (flops)
Data

Bits/Bytes and Words
• Bits are grouped into larger units
– 8 bits = 1 byte (still common)
– 2/4/8 bytes = word (varies between CPU’s)
– Most desktop machines are 32-bit words,
64-bit machines are becoming more common
• set by data bus
– Why important?
• Sets minimum size unit you can access in program,
and often the precision for computations
Words and Bytes
• Number of unique values that can be represented depends on number of bits
• With n bits one can have 2n unique values
• For n=8 have (Byte) = 256– grouped into larger units to represent different data
• ASCII – American Standard Code for Information Interchange– Basic version is 7 bit (127 characters)
– A-Z, a-z, 0-9 and special characters
– Values <32 are “control characters”

Numbers and bases
• Numbers represented in different base systems
– Binary base 2 (0-1)
– Octal base 8 (0-7)
– Hexadecimal base 16 (0-15, with A-F representing
10-15)
– E.g, 5410=3616=668=1101102
• Prefixes: kilo = 1024; mega=1048576;
giga=10737741824 (approximately 103,106,109)

Instructions
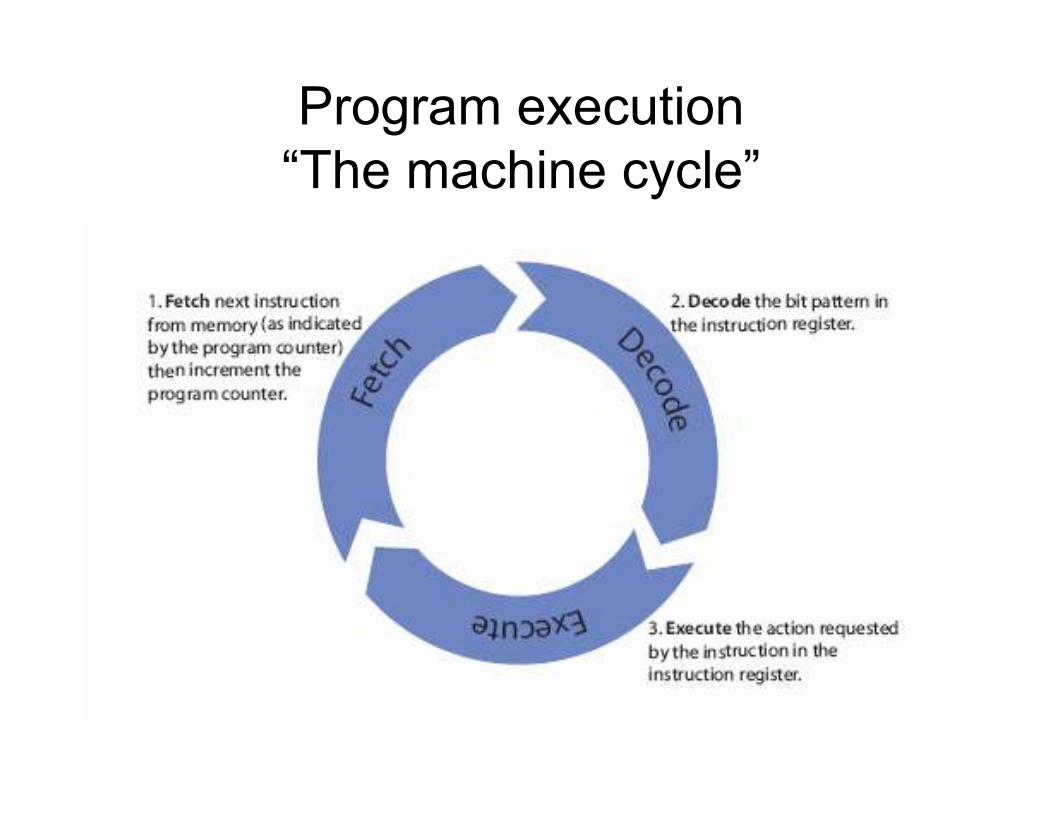
Program execution
“The machine cycle”

Instruction composition

Stored program
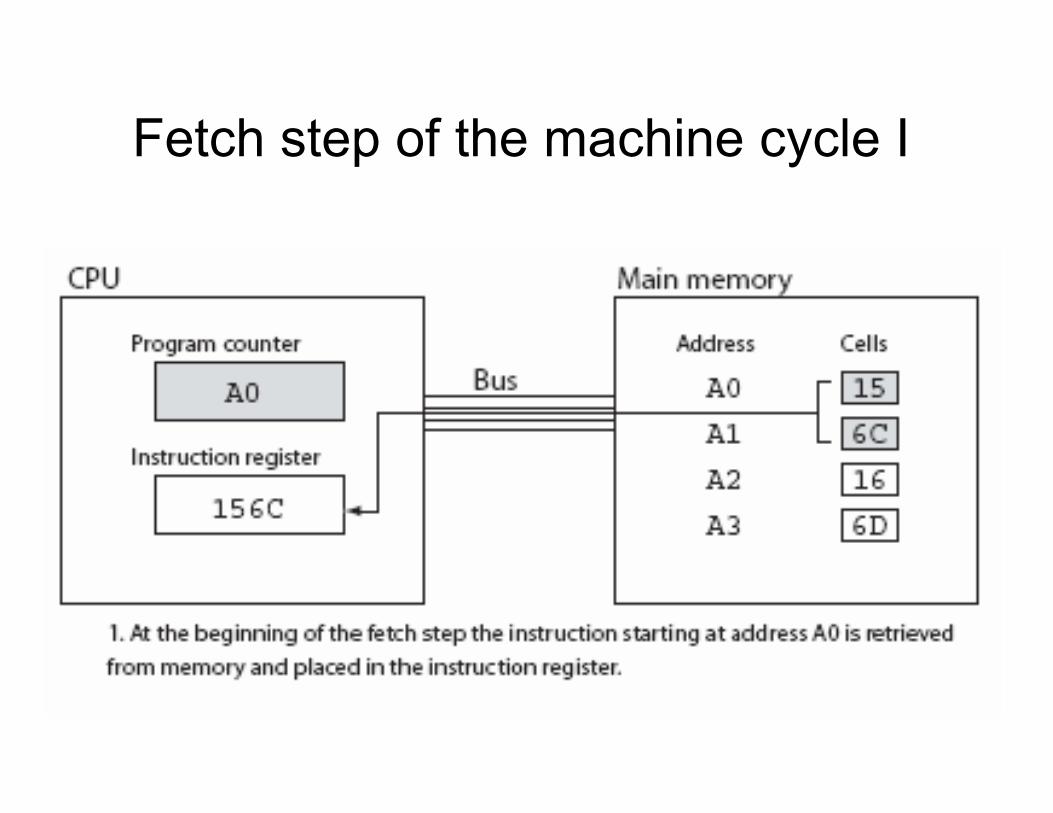
Fetch step of the machine cycle I
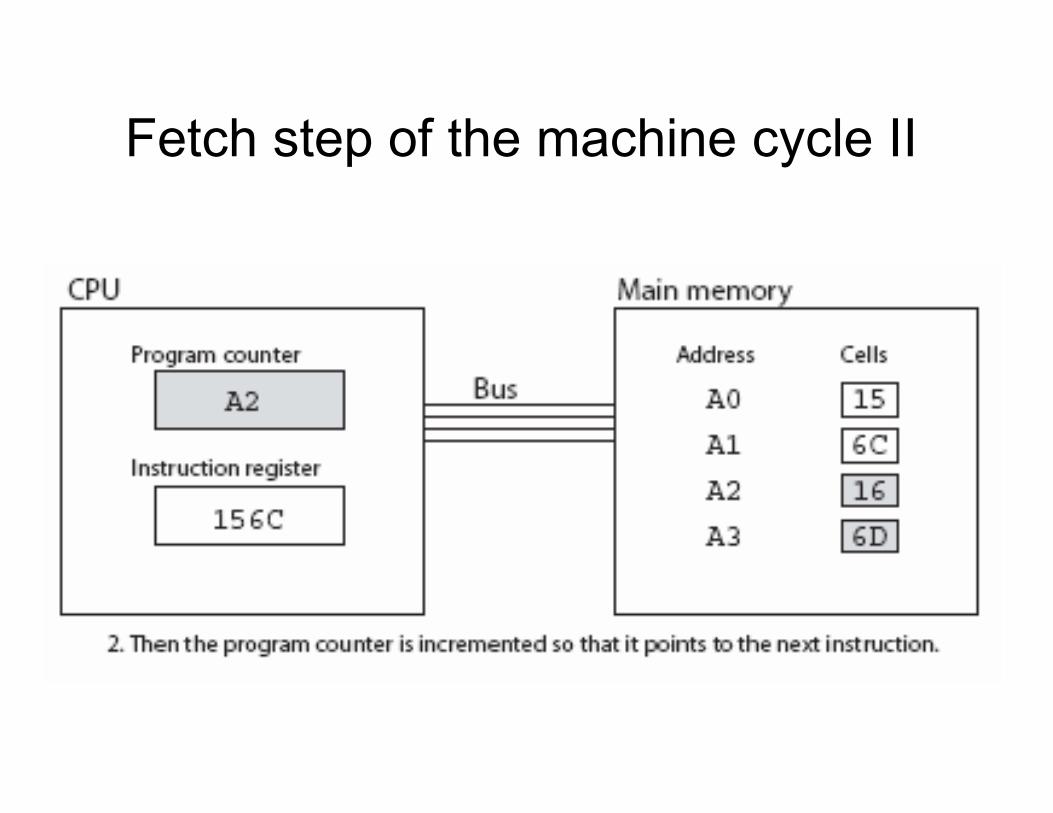
Fetch step of the machine cycle II

Decoding the instruction
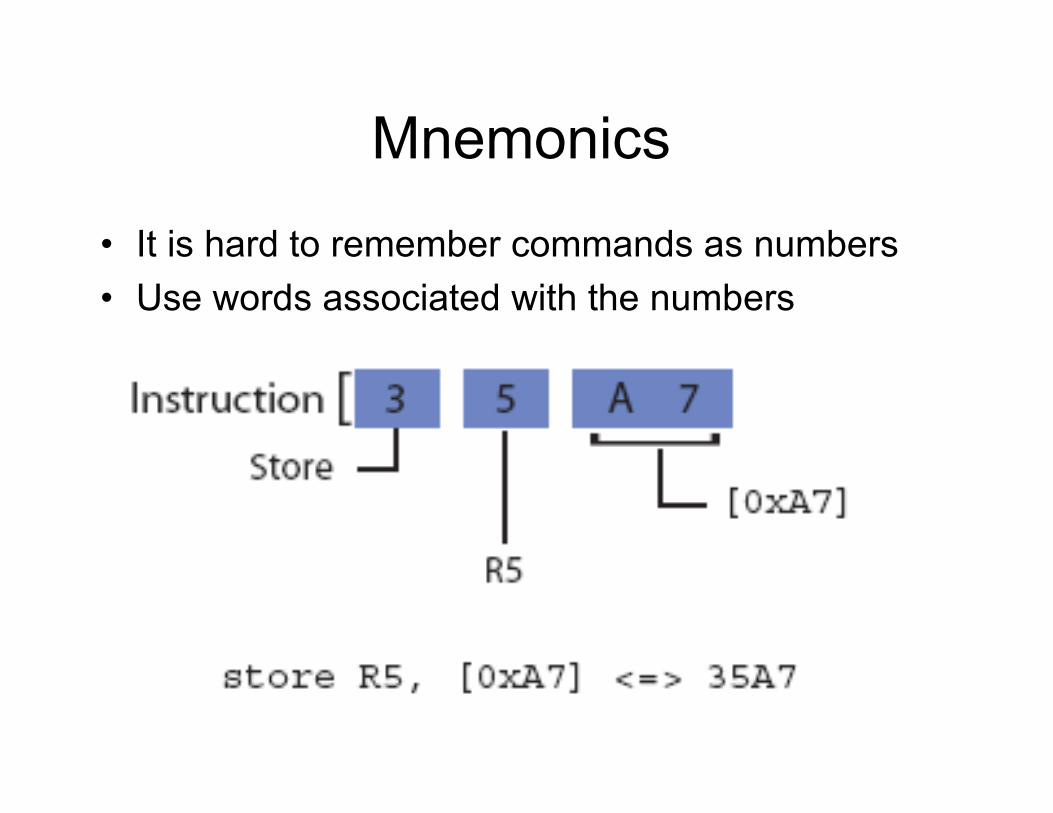
Mnemonics
• It is hard to remember commands as numbers
• Use words associated with the numbers

Some Assembly language

Operating System

OS
• The Operating System (OS)
– Controls everything in the way the computer works.
– Not Specific to a CPU type but often some OS’s are
associated with specific CPUs
• G3/4/5 68x series MacOS
• Pentium, x86 DOS (Windows)
• SPARC Solaris (Unix)
– OS controls IO and memory management
• Program implementations are dependent on OS

Programming interface to OS
• Depending on language used, OS
interface may or may not be important
• For Fortran, C, C++ when program is
linked OS routines are needed
– How to read from keyboard or file?
– How to write to screen or disk?
• In your program you do not need to go into
the low-level (OS) details

Storage in memory
• Memory treated as a linear array of bytes, from 1 to <size of memory>
• OS keeps track of used and free memory, for use by programs and data
• Some computers do “byte-swapping”– the bytes are not counted linearly but rather are switched
– main (but not only) styles are Big Endian (HP, Sun, Macs) and Little Endian (PC)
– affects ability to transfer binary data; TCP knows this and will accommodate this up to a certain degree

Basics revisited

Hard disks• Contain the computer “file
system”– allows access through file names
• Directory structure points to file location– reason for having less space
available than the size of disk + some calibration tracks
• Actual content of HD and directories depend on OS– e.g., FAT16, FAT32, NTFS for
Windows, EXT2 for Linux
• In general, OS can only use their own file-system

Accessing RAM vs. HDD
• The highest possible
bandwidth (peak
bandwidth) for the various
types of RAM
– However, RAM also has to
match the motherboard,
chipset and the CPU
system bus
• HDD ~ only 80MB/s
• In MATLAB: try save,
load, pack, clear10600DUAL DDR2-533
8600DUAL DDR2-400
6400DUAL DDR PC3200
3200DDR 400 (PC3200)
2664DDR 333 (PC2700)
2128DDR 266 (PC2100)
3200Rambus, Dual PC800
1600Rambus, PC800
1064SD RAM, PC133
800SD RAM, PC100
Max.
Transfer, MB/s
Module type
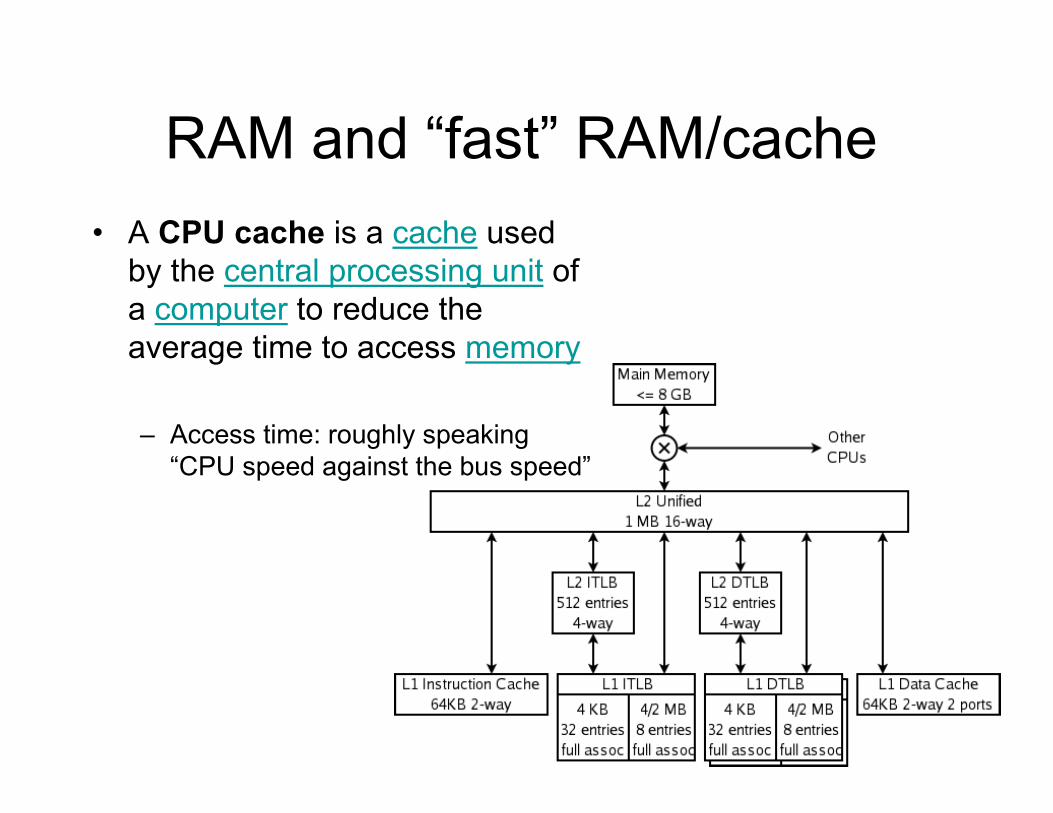
RAM and “fast” RAM/cache
• A CPU cache is a cache used
by the central processing unit of
a computer to reduce the
average time to access memory
– Access time: roughly speaking
“CPU speed against the bus speed”
Integers
• Integer numbers can be represented exactly (up
to the range allowed by the number of bytes)
• A 2-byte integer, unsigned 0-65535, signed
±32767 (sometimes called short)
• A 4-byte integer, unsigned 0-4294967295,
signed ±2147483827
– (With a 32-bit address bus, can have 4Gbytes of
memory—reason max memory is limited in
computers)

Floating point
• Representations vary between machines (often
reason binary files can not be shared)
– Precise layout of bits depends on machine and
format; all formats are (mantissa)*2(exponent)

The IEEE standard for floating
point arithmetic• Single precision (32 bits=4 bytes)
S EEEEEEEE FFFFFFFFFFFFFFFFFFFFFF
0 1 8 9 31
The value V represented by the word may be determined as follows:
• If E=255 and F is nonzero, then V=NaN ("Not a number")
• If E=255 and F is zero and S is 1, then V=-Infinity
• If E=255 and F is zero and S is 0, then V=Infinity
• If 0<E<255 then V=(-1)S * 2(E-127) * (1.F) where "1.F" is intended to represent the binary number created by prefixing F with an implicit leading 1 and a binary point
• If E=0 and F is nonzero, then V=(-1)S * 2 (-126) * (0.F). These are "unnormalized" values.
• If E=0 and F is zero and S is 1, then V=-0
• If E=0 and F is zero and S is 0, then V=0

Single precision floating point
• In particular
0 00000000 00000000000000000000000 = 0
1 00000000 00000000000000000000000 = -0
0 11111111 00000000000000000000000 = Infinity
1 11111111 00000000000000000000000 = -Infinity
0 11111111 00000100000000000000000 = NaN
1 11111111 00100010001001010101010 = NaN
0 10000000 00000000000000000000000 = +1 * 2(128-127) * 1.0 = 2
0 10000001 10100000000000000000000 = +1 * 2(129-127) * 1.101 = 22*(23+22+1)/23 = 6.5
1 10000001 10100000000000000000000 = -1 * 2(129-127) * 1.101 = -6.5
0 00000001 00000000000000000000000 = +1 * 2(1-127) * 1.0 = 2(-126)
0 00000000 10000000000000000000000 = +1 * 2(-126) * 0.1 = 2(-127)
0 00000000 00000000000000000000001 = +1 * 2(-126) *
0.00000000000000000000001 =
2(-149) (Smallest positive value)
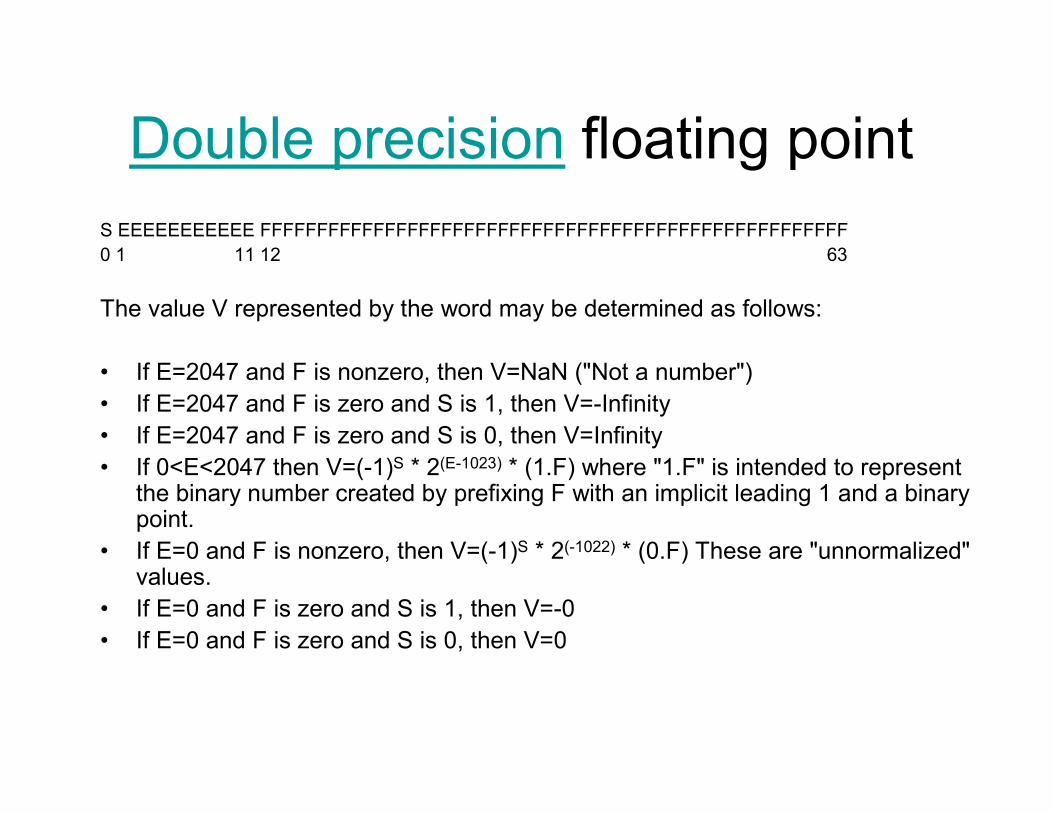
Double precision floating point
S EEEEEEEEEEE FFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFF
0 1 11 12 63
The value V represented by the word may be determined as follows:
• If E=2047 and F is nonzero, then V=NaN ("Not a number")
• If E=2047 and F is zero and S is 1, then V=-Infinity
• If E=2047 and F is zero and S is 0, then V=Infinity
• If 0<E<2047 then V=(-1)S * 2(E-1023) * (1.F) where "1.F" is intended to represent the binary number created by prefixing F with an implicit leading 1 and a binary point.
• If E=0 and F is nonzero, then V=(-1)S * 2(-1022) * (0.F) These are "unnormalized" values.
• If E=0 and F is zero and S is 1, then V=-0
• If E=0 and F is zero and S is 0, then V=0
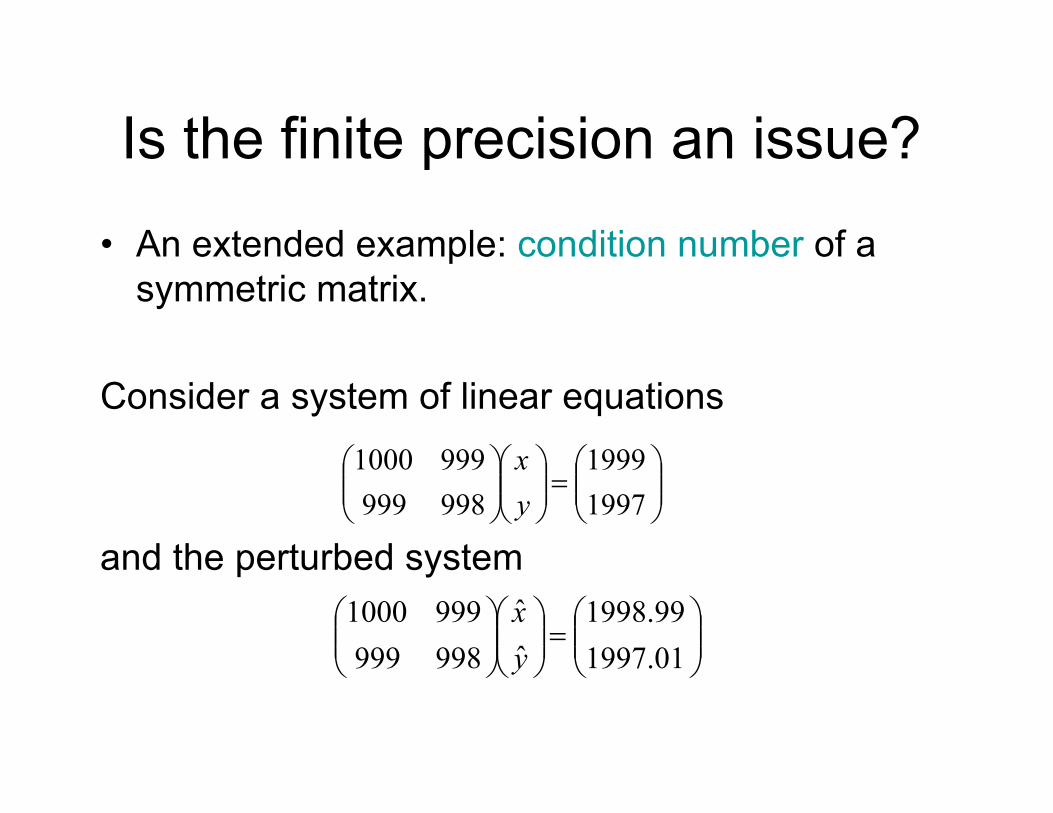
Is the finite precision an issue?
• An extended example: condition number of a
symmetric matrix.
Consider a system of linear equations
and the perturbed system
=
1997
1999
998999
9991000
y
x
=
01.1997
99.1998
ˆ
ˆ
998999
9991000
y
x
Example
Note but ?
What went wrong?
Recall an n-by-n matrix A is symmetric if A=AT.
Fact (“spectral decomposition”):
If A is symmetric, it may be written as
A=UDUT,
where D is the diagonal matrix,
U is unitary (i.e., UUT=I, the identity matrix).
1
1
=
y
x
99.18
97.20
ˆ
ˆ
−
+=
y
x

Example
Fact: U is unitary is “almost the same” as
U is a rotation matrix • “almost the same” because U might include reflections
Fact: For A=UDUT as before, the diagonal
elements of D are the eigenvalues of A and
columns of U are the right eigenvectors of A.
Recall t is an eigenvalue of A iff det(A-tI)=0,
u is the corresponding right eigenvector iff
Au=tu.

Example
• How does A act on x, step-by-step:
Ax=UDUTx=UD(UTx)=U(D(UTx)),
that is, “rotate, scale, rotate back”.
Define the condition number of A as
χ(A)=|t|max(A) / |t|min(A)
where |t|max and |t|min are the largest and the smallest in absolute value eigenvalues of A.
χ(A) shows how far off the solution to Ax=b may be from the solution to Ax=b+Ε (a measure of “relative singularity”).
Assignment 2MATLAB and C code are posted on the web.
1. Using the MATLAB script from the class, try to identify the cache size on your machine. Note that usually a number in MATLAB occupies 8 bytes (double precision floating point), and that the function requires roughly 2-times the memory needed to store the x vector (x in the input, x_new in the output). Explain your results. As a sanity check, you might want to use a CPU info tool.
2. Condition number I: for the class example, answer the following:a) find the matrix spectral decomposition and compute the matrix condition number,
b) find perturbations Ε of the right-hand side of the equation with (the Euclidean norm) ||Ε||=1 that give the largest and the smallest errors in the solution vector; plot each of the two perturbations, together with their image under UT, under D-1UT and, finally, under A-1,
c) given the equation for the curve ||Ε||=1, find its image under A-1 and plot it,
d) find the explicit expression for the condition number χ(A-γ I) for γ > 0.3. Condition number II: given a 2x2 matrix with double-precision entries, what is the
worst condition number this matrix might have (as a real number)? Explain.
4. Condition number III: for the question 2 of the first assignment, is there any ill-conditioning? (Ill-conditioning refers to a matrix having large condition number, hence often resulting in numerical instability; if you happen to encounter complex eigenvalues, you are on the wrong track; for the definition in class, matrix must be symmetric.) Explain your answer.
5. Bonus question: find all the distinct spectral decompositions of the identity matrix.