Balancing forward and feedback error correctionsahai/Presentations/Nov6UCB.pdf · In extending the...
141
Balancing forward and feedback error correction Anant Sahai based in part on joint work with: Stark Draper, Tunc Simsek, and Paul Liu [email protected] Wireless Foundations Department of Electrical Engineering and Computer Sciences University of California at Berkeley Major Support from NSF ITR November 6th 2006 Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 1 / 44
Transcript of Balancing forward and feedback error correctionsahai/Presentations/Nov6UCB.pdf · In extending the...

Balancing forward and feedback error correction
Anant Sahaibased in part on joint work with:
Stark Draper, Tunc Simsek, and Paul Liu
[email protected] Foundations
Department of Electrical Engineering and Computer SciencesUniversity of California at Berkeley
Major Support from NSF ITR
November 6th 2006
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 1 / 44

Information theory studies:
Goals: high rate, low delay, and low probability of error.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 2 / 44

Information theory studies:
Feedback
Goals: high rate, low delay, and low probability of error.What if there is feedback?
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 2 / 44

Information theory studies:
Feedback
Goals: high rate, low delay, and low probability of error.What if there is feedback?
◮ If noise is memoryless, capacity is unchanged.◮ What about delay and probability of error?
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 2 / 44

Information theory studies:
Feedback
Goals: high rate, low delay, and low probability of error.What if there is feedback?
◮ If noise is memoryless, capacity is unchanged.◮ What about delay and probability of error?◮ How should we use it?
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 2 / 44

Information theory studies:
Feedback
Goals: high rate, low delay, and low probability of error.What if there is feedback?
◮ If noise is memoryless, capacity is unchanged.◮ What about delay and probability of error?◮ How should we use it?◮ How much feedback do we need?
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 2 / 44

Flashback and Warning: 1973 (Bob Lucky)
“Feedback communications was an area of intense activity in1968. . . A number of authors had shown constructive, even simple,schemes using noiseless feedback to achieve Shannon-like behav-ior. . . The situation in 1973 is dramatically different. . .The subjectitself seems to be a burned out case. . .
In extending the simple noiseless feedback model to allow formore realistic situations, such as noisy feedback channels, bandlim-ited channels, and peak power constraints, theorists discovered acertain“brittleness” or sensitivity in their previous results. . . ”
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 3 / 44

Flashback and Warning: 1973 (Bob Lucky)
“Feedback communications was an area of intense activity in1968. . . A number of authors had shown constructive, even simple,schemes using noiseless feedback to achieve Shannon-like behav-ior. . . The situation in 1973 is dramatically different. . .The subjectitself seems to be a burned out case. . .
In extending the simple noiseless feedback model to allow formore realistic situations, such as noisy feedback channels, bandlim-ited channels, and peak power constraints, theorists discovered acertain“brittleness” or sensitivity in their previous results. . . ”
Our goal: show“robustness” of gains due to feedback.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 3 / 44

Outline
1 Problem and Background2 Erasure channels: packet-wise hard deadlines with limited feedback3 BSC: bitwise soft deadlines with truly noisy feedback
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 4 / 44

Communication with a latency requirement
-AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA
-
? ? ? ? ? ? ? ? ?
? ? ?? ? ? ? ? ? ? ? ? ?
Y1 Y2 Y3 Y4 Y5 Y6 Y7 Y8 Y9 Y10 Y11 Y12 Y13 Y14 Y15 Y16 Y17 Y18 Y19 Y20 Y21 Y22 Y23 Y24 Y25 Y26
Z1 Z2 Z3 Z4 Z5 Z6 Z7 Z8 Z9 Z10 Z11 Z12 Z13 Z14 Z15 Z16 Z17 Z18 Z19 Z20 Z21 Z22 Z23 Z24 Z25 Z26
fixed delayd = 7
bB6 bB8bB1 bB2 bB3 bB4 bB5 bB7 bB9
B1 B2 B3 B4 B5 B6 B7 B8 B9 B10 B11 B12 B13
Bits/packets arrive steadily at rateR per channel use.End-to-end latency requirement ofd:
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 6 / 44

Communication with a latency requirement
-AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA
-
? ? ? ? ? ? ? ? ?
? ? ?? ? ? ? ? ? ? ? ? ?
Y1 Y2 Y3 Y4 Y5 Y6 Y7 Y8 Y9 Y10 Y11 Y12 Y13 Y14 Y15 Y16 Y17 Y18 Y19 Y20 Y21 Y22 Y23 Y24 Y25 Y26
Z1 Z2 Z3 Z4 Z5 Z6 Z7 Z8 Z9 Z10 Z11 Z12 Z13 Z14 Z15 Z16 Z17 Z18 Z19 Z20 Z21 Z22 Z23 Z24 Z25 Z26
fixed delayd = 7
bB6 bB8bB1 bB2 bB3 bB4 bB5 bB7 bB9
B1 B2 B3 B4 B5 B6 B7 B8 B9 B10 B11 B12 B13
Bits/packets arrive steadily at rateR per channel use.End-to-end latency requirement ofd:
◮ Hard : Declared or undetected errors are equally bad.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 6 / 44

Communication with a latency requirement
-AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA AA
-
? ? ? ? ? ? ? ? ?
? ? ?? ? ? ? ? ? ? ? ? ?
Y1 Y2 Y3 Y4 Y5 Y6 Y7 Y8 Y9 Y10 Y11 Y12 Y13 Y14 Y15 Y16 Y17 Y18 Y19 Y20 Y21 Y22 Y23 Y24 Y25 Y26
Z1 Z2 Z3 Z4 Z5 Z6 Z7 Z8 Z9 Z10 Z11 Z12 Z13 Z14 Z15 Z16 Z17 Z18 Z19 Z20 Z21 Z22 Z23 Z24 Z25 Z26
fixed delayd = 7
bB6 bB8bB1 bB2 bB3 bB4 bB5 bB7 bB9
B1 B2 B3 B4 B5 B6 B7 B8 B9 B10 B11 B12 B13
Bits/packets arrive steadily at rateR per channel use.End-to-end latency requirement ofd:
◮ Hard : Declared or undetected errors are equally bad.◮ Soft: Undetected errors are very bad, but declared errors shouldbe
infrequent.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 6 / 44

Review: Fixed block-codes for hard deadlinesBuffer-upnRbits and use a block-codeMust decode after a furthern channel uses
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 7 / 44

Review: Fixed block-codes for hard deadlinesBuffer-upnRbits and use a block-codeMust decode after a furthern channel usesStudy the probability of block error in the limit of largenBlock error exponents:Pe ∝ exp(−nE(R))
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 7 / 44

Review: Fixed block-codes for hard deadlinesBuffer-upnRbits and use a block-codeMust decode after a furthern channel usesStudy the probability of block error in the limit of largenBlock error exponents:Pe ∝ exp(−nE(R))
◮ Generic channels: (Haroutunian-77)
E+(R) = infG:C(G)<R
max~q
D (G||P|~q)
◮ Holds with or without feedback
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 7 / 44

Review: Fixed block-codes for hard deadlinesBuffer-upnRbits and use a block-codeMust decode after a furthern channel usesStudy the probability of block error in the limit of largenBlock error exponents:Pe ∝ exp(−nE(R))
◮ “Sphere-packing” bound:
Esp(R) = max~q
minG:I(~q,G)≤R
D (G||P|~q)
= supρ≥0
E0(ρ) − ρR
E0(ρ) = max~q
− ln∑
z
[
∑
y
qyp1
1+ρ
z|y
](1+ρ)
◮ Holds without feedback
◮ Same asE+(R) for symmetric channels!(Feedback useless)Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 7 / 44

Review: Fixed blocks
x
x
x
x x
x
x x
x
Hard decision regionscover space
Feedback is pointless
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 8 / 44

Review: Fixed blocks, Soft deadlines
x
x
x
x x
x
x x
x����
����
����
����
����
����
����
����
����
Hard decisions regions butcheck hash signatures
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 8 / 44

Review: Fixed blocks, Soft deadlines
x
x
x
x x
x
x x
x����
����
����
����
����
����
����
����
����
Hard decisions regions butcheck hash signatures
1 bit feedback can requestretransmissions
Can interpret as expectedblock-length
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 8 / 44

Review: Fixed blocks, Soft deadlines
x
x
x
x x
x
x x
x����
����
����
����
����
����
����
����
����
Hard decisions regions butcheck hash signatures
1 bit feedback can requestretransmissions
Can interpret as expectedblock-length
Run close to capacity
Use≈ n(C− R) bits forsignatures
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 8 / 44

Review: Fixed blocks, Soft deadlines
x
x
x
x x
x
x x
x����
����
����
����
����
����
����
����
����
Hard decisions regions butcheck hash signatures
1 bit feedback can requestretransmissions
Can interpret as expectedblock-length
Run close to capacity
Use≈ n(C− R) bits forsignatures
Linear slope for error exponent
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 8 / 44

Review: Fixed blocks, Soft deadlines: Forney-68
x
x
x
x x
x
x x
x
Refuse to decide whenambiguous
1 bit feedback can requestretransmissions
Can interpret as expectedblock-length
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 8 / 44

Review: Fixed blocks, Soft deadlines: Forney-68
x
x
x
x x
x
x x
x
Refuse to decide whenambiguous
1 bit feedback can requestretransmissions
Can interpret as expectedblock-length
Decision regions catch the typicalsets only
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 8 / 44

Review: Fixed blocks, Soft deadlines: Forney-68
x
x
x
x x
x
x x
x
Refuse to decide whenambiguous
1 bit feedback can requestretransmissions
Can interpret as expectedblock-length
Decision regions catch the typicalsets only
Better error exponents at lowerrates
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 8 / 44

Review: Fixed blocks, Soft deadlines: Burnashev-76
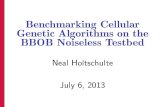
Is more feedback helpful?Burnashev said yes:
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 9 / 44

Review: Fixed blocks, Soft deadlines: Burnashev-76
Is more feedback helpful?Burnashev said yes:
◮ Considered expected stopping time and used Martingale arguments.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 9 / 44

Review: Fixed blocks, Soft deadlines: Burnashev-76
Is more feedback helpful?Burnashev said yes:
◮ Considered expected stopping time and used Martingale arguments.◮ ShowedC1(1− R
C) was a bound whereC1 = maxi,j D(pi ||pj)
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 9 / 44

Review: Fixed blocks, Soft deadlines: Burnashev-76
Is more feedback helpful?Burnashev said yes:
◮ Considered expected stopping time and used Martingale arguments.◮ ShowedC1(1− R
C) was a bound whereC1 = maxi,j D(pi ||pj)
0 0.1 0.2 0.3 0.4 0.50
0.5
1
1.5
2
2.5
erro
r ex
pone
nt
average communication rate (bits/channel use)
Burnashev exponentForney exponentSphere packing exponentSphere−packing bound
Random signature performance
Forney performance
Burnashev bound
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 9 / 44

Review: Yamamoto-Itoh-79 strategy attains theBurnashev bound
Ack/Nak
( 1 − λ )
Enc Dec
λ n
Decision feedback = m
.....retransmissions
possible .....
Block length n
Data Transmission
n
Data Transmission:λn channel uses for block code atR≃ C
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 10 / 44

Review: Yamamoto-Itoh-79 strategy attains theBurnashev bound
Ack/Nak
( 1 − λ )
Enc Dec
λ n
Decision feedback = m
.....retransmissions
possible .....
Block length n
Data Transmission
n
Data Transmission:λn channel uses for block code atR≃ C
Decision Feedback:m sent back
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 10 / 44

Review: Yamamoto-Itoh-79 strategy attains theBurnashev bound
Ack/Nak
( 1 − λ )
Enc Dec
λ n
Decision feedback = m
.....retransmissions
possible .....
Block length n
Data Transmission
n
Data Transmission:λn channel uses for block code atR≃ C
Decision Feedback:m sent back
Confirm/Deny: (1− λ)n channel uses toACK or NAK
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 10 / 44

Review: Yamamoto-Itoh-79 strategy attains theBurnashev bound
Ack/Nak
( 1 − λ )
Enc Dec
λ n
Decision feedback = m
.....retransmissions
possible .....
Block length n
Data Transmission
n
Data Transmission:λn channel uses for block code atR≃ C
Decision Feedback:m sent back
Confirm/Deny: (1− λ)n channel uses toACK or NAK
If confirmed, decode tomotherwise erase.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 10 / 44

Review: Yamamoto-Itoh-79 strategy attains theBurnashev bound
Ack/Nak
( 1 − λ )
Enc Dec
λ n
Decision feedback = m
.....retransmissions
possible .....
Block length n
Data Transmission
n
Data Transmission:λn channel uses for block code atR≃ C
Decision Feedback:m sent back
Confirm/Deny: (1− λ)n channel uses toACK or NAK
If confirmed, decode tomotherwise erase.
Pr[err]=Pr[NAK→ACK]=2−(1−λ)nC1 ≃2−nC1(1−RC )
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 10 / 44

Review: Yamamoto-Itoh-79 strategy attains theBurnashev bound
Ack/Nak
( 1 − λ )
Enc Dec
λ n
Decision feedback = m
.....retransmissions
possible .....
Block length n
Data Transmission
n
Data Transmission:λn channel uses for block code atR≃ C
Decision Feedback:m sent back
Confirm/Deny: (1− λ)n channel uses toACK or NAK
If confirmed, decode tomotherwise erase.
Pr[err]=Pr[NAK→ACK]=2−(1−λ)nC1 ≃2−nC1(1−RC )
Moral: Collective reward/punishment is good for reliability
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 10 / 44

Outline
1 Problem and Background2 Erasure channels: packet-wise hard deadlines with limited feedback
◮ Mildly delayed, but high-rate and reliable, feedback◮ Low-rate, but reliable, feedback◮ Unreliable feedback
3 BSC: bitwise soft deadlines with truly noisy feedback
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 11 / 44

Nonblock coding for BEC with perfect feedback
f
f
f
f
f
PPPPPPP
�������
1 − δ
1 − δ
δ
δ
1
0
1
0
e
Simple capacity 1− δ bitsper channel use
With perfect non-delayedfeedback, simple toachieve: retransmit until itgets through
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 13 / 44

Nonblock coding for BEC with perfect feedback
f
f
f
f
f
PPPPPPP
�������
1 − δ
1 − δ
δ
δ
1
0
1
0
e
Simple capacity 1− δ bitsper channel use
With perfect non-delayedfeedback, simple toachieve: retransmit until itgets through
Hard deadlines bounds:
0
0.2
0.4
0.6
0.8
1
1.2
0.1 0.2 0.3 0.4 0.5 0.6Rate (in bits)
Err
or
Exp
on
en
t (b
ase
2)
Without Feedback:Sphere-packing boundD(1− R||δ)
With Feedback:Focusing bound(E0(ρ)
ρ, E0(ρ))
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 13 / 44

k-delayed feedback packet erasure case
First approach: treat as k parallel unit-delay channels
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 14 / 44

k-delayed feedback packet erasure case
First approach: treat as k parallel unit-delay channels
0
0.2
0.4
0.6
0.8
0.1 0.2 0.3 0.4 0.5 0.6Rate (in bits)
Err
or E
xpon
ent (
base
e)
Serious penalty to waitingk steps between retransmissions
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 14 / 44

The traditional approach: block-coding
Group bits into packets with lengthnR′
◮ Transmit using a rateR′ > R random block-code of lengthn ≫ k
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 15 / 44

The traditional approach: block-coding
Group bits into packets with lengthnR′
◮ Transmit using a rateR′ > R random block-code of lengthn ≫ k◮ Use feedback to ACK/NAK only (low rate)◮ Retransmit block if unsuccessful
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 15 / 44

The traditional approach: block-coding
Group bits into packets with lengthnR′
◮ Transmit using a rateR′ > R random block-code of lengthn ≫ k◮ Use feedback to ACK/NAK only (low rate)◮ Retransmit block if unsuccessful
Effective block-lengthn + k ≈ n
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 15 / 44

The traditional approach: block-coding
Group bits into packets with lengthnR′
◮ Transmit using a rateR′ > R random block-code of lengthn ≫ k◮ Use feedback to ACK/NAK only (low rate)◮ Retransmit block if unsuccessful
Effective block-lengthn + k ≈ nPerformance
◮ Er(R′) < E0(ρ) governs probability of block retransmission
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 15 / 44

The traditional approach: block-coding
Group bits into packets with lengthnR′
◮ Transmit using a rateR′ > R random block-code of lengthn ≫ k◮ Use feedback to ACK/NAK only (low rate)◮ Retransmit block if unsuccessful
Effective block-lengthn + k ≈ nPerformance
◮ Er(R′) < E0(ρ) governs probability of block retransmission◮ Bad, even without accounting for queuing delay
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 15 / 44

Low-rate (“bandlimited”) feedback picture
�
-Forward BEC uses
S1 S2 S3 S4 S5 S6
Rate1c noiseless feedback channel uses
c is part of the problem, not tied to the block-length.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 17 / 44

Low-rate (“bandlimited”) feedback picture
�
-Forward BEC uses
S1 S2 S3 S4 S5 S6
Rate1c noiseless feedback channel uses
c is part of the problem, not tied to the block-length.
Assume target latencyd ≫ c
Assume round-trip timek ≪ c
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 17 / 44

Incremental Redundancy Hybrid ARQ
Gentler retransmission:
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 18 / 44

Incremental Redundancy Hybrid ARQ
Gentler retransmission:1 Group bits into blocks of sizenR. (c ≪ n ≪ d)
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 18 / 44

Incremental Redundancy Hybrid ARQ
Gentler retransmission:1 Group bits into blocks of sizenR. (c ≪ n ≪ d)2 Hold blocks in a FIFO queue
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 18 / 44

Incremental Redundancy Hybrid ARQ
Gentler retransmission:1 Group bits into blocks of sizenR. (c ≪ n ≪ d)2 Hold blocks in a FIFO queue3 Service using an∞-length random codebook. (rateless code)
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 18 / 44

Incremental Redundancy Hybrid ARQ
Gentler retransmission:1 Group bits into blocks of sizenR. (c ≪ n ≪ d)2 Hold blocks in a FIFO queue3 Service using an∞-length random codebook. (rateless code)4 Feedback “ACK” when we can decode.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 18 / 44

Incremental Redundancy Hybrid ARQ
Gentler retransmission:1 Group bits into blocks of sizenR. (c ≪ n ≪ d)2 Hold blocks in a FIFO queue3 Service using an∞-length random codebook. (rateless code)4 Feedback “ACK” when we can decode.
Three delays:
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 18 / 44

Incremental Redundancy Hybrid ARQ
Gentler retransmission:1 Group bits into blocks of sizenR. (c ≪ n ≪ d)2 Hold blocks in a FIFO queue3 Service using an∞-length random codebook. (rateless code)4 Feedback “ACK” when we can decode.
Three delays:◮ Assembly:n insignificant relative tod
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 18 / 44

Incremental Redundancy Hybrid ARQ
Gentler retransmission:1 Group bits into blocks of sizenR. (c ≪ n ≪ d)2 Hold blocks in a FIFO queue3 Service using an∞-length random codebook. (rateless code)4 Feedback “ACK” when we can decode.
Three delays:◮ Assembly:n insignificant relative tod◮ Queuing: Wait before servicing starts
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 18 / 44

Incremental Redundancy Hybrid ARQ
Gentler retransmission:1 Group bits into blocks of sizenR. (c ≪ n ≪ d)2 Hold blocks in a FIFO queue3 Service using an∞-length random codebook. (rateless code)4 Feedback “ACK” when we can decode.
Three delays:◮ Assembly:n insignificant relative tod◮ Queuing: Wait before servicing starts◮ Transmission: Service-time distribution
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 18 / 44

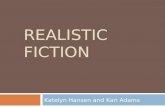
Transmission-delay: operational interpretation of E0(ρ)
Block transmission time T can be bounded by a constant plus a geometricrandom variable.
0
0.2
0.4
0.6
0.8
0.1 0.2 0.3 0.4Rate (in nats)
Err
or E
xpon
ent (
base
e)
Rρ
ρ
ρ=3
E ( )0
Need to do list-decoding at low rates.Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 19 / 44

How to pick ρ for bounding
PickR < Rρ < C and aim forE+a (Rρ) = E0(ρ) exponent.
0
0.2
0.4
0.6
0.8
0.1 0.2 0.3 0.4
Rate (in nats)
Err
or E
xpon
ent (
base
e)
Target
R Rρ
ρE( )0
ρ−
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 20 / 44

Queuing delay: the point message view
Consider the queue at the level of blocks:◮ Arrive everyn channel uses
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 21 / 44

Queuing delay: the point message view
Consider the queue at the level of blocks:◮ Arrive everyn channel uses◮ When serviced, immediately consume a constantn R
Rρchannel uses
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 21 / 44

Queuing delay: the point message view
Consider the queue at the level of blocks:◮ Arrive everyn channel uses◮ When serviced, immediately consume a constantn R
Rρchannel uses
◮ After that, geometric service-time withδρ = exp(−E0(ρ))
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 21 / 44

Queuing delay: the point message view
Consider the queue at the level of blocks:◮ Arrive everyn channel uses◮ When serviced, immediately consume a constantn R
Rρchannel uses
◮ After that, geometric service-time withδρ = exp(−E0(ρ))
Delay> d implies dn messages waiting in the queue
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 21 / 44

Queuing delay: the point message view
Consider the queue at the level of blocks:◮ Arrive everyn channel uses◮ When serviced, immediately consume a constantn R
Rρchannel uses
◮ After that, geometric service-time withδρ = exp(−E0(ρ))
Delay> d implies dn messages waiting in the queue
Suppose the queue last renewedr messages ago◮ rn channel uses since then
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 21 / 44

Queuing delay: the point message view
Consider the queue at the level of blocks:◮ Arrive everyn channel uses◮ When serviced, immediately consume a constantn R
Rρchannel uses
◮ After that, geometric service-time withδρ = exp(−E0(ρ))
Delay> d implies dn messages waiting in the queue
Suppose the queue last renewedr messages ago◮ rn channel uses since then◮ At mostq = r − d
n blocks serviced
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 21 / 44

Queuing delay: the point message view
Consider the queue at the level of blocks:◮ Arrive everyn channel uses◮ When serviced, immediately consume a constantn R
Rρchannel uses
◮ After that, geometric service-time withδρ = exp(−E0(ρ))
Delay> d implies dn messages waiting in the queue
Suppose the queue last renewedr messages ago◮ rn channel uses since then◮ At mostq = r − d
n blocks serviced◮ So removeqn R
Rρchannel uses
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 21 / 44

Queuing delay: the point message view
Consider the queue at the level of blocks:◮ Arrive everyn channel uses◮ When serviced, immediately consume a constantn R
Rρchannel uses
◮ After that, geometric service-time withδρ = exp(−E0(ρ))
Delay> d implies dn messages waiting in the queue
Suppose the queue last renewedr messages ago◮ rn channel uses since then◮ At mostq = r − d
n blocks serviced◮ So removeqn R
Rρchannel uses
◮ Leavingd + qn(1− RRρ
) “slack” uses of which onlyq were successful.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 21 / 44

Queuing delay: the point message view
Consider the queue at the level of blocks:◮ Arrive everyn channel uses◮ When serviced, immediately consume a constantn R
Rρchannel uses
◮ After that, geometric service-time withδρ = exp(−E0(ρ))
Delay> d implies dn messages waiting in the queue
Suppose the queue last renewedr messages ago◮ rn channel uses since then◮ At mostq = r − d
n blocks serviced◮ So removeqn R
Rρchannel uses
◮ Leavingd + qn(1− RRρ
) “slack” uses of which onlyq were successful.
This is exactly like a bit-rate 1n(1− R
Rρ)
code on a perfect-feedback BEC
with erasure probabilityδρ.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 21 / 44

Queuing delay: reduction to the low-rate erasure casePickR < Rρ < C and aim forE+
a (Rρ) = E0(ρ) exponent.
0
0.2
0.4
0.6
0.8
0.1 0.2 0.3 0.4Rate (in nats)
Err
or E
xpon
ent (
base
e)
Target
R Rρ
ρE( )0
ρ−
If n large, effective point-message rate(n(1− RRρ
))−1 is small.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 22 / 44

Queuing delay: reduction to the low-rate erasure casePickR < Rρ < C and aim forE+
a (Rρ) = E0(ρ) exponent.
0
0.2
0.4
0.6
0.8
0.1 0.2 0.3 0.4Rate (in nats)
Err
or E
xpon
ent (
base
e)
Target
R Rρ
ρE( )0
ρ−
If n large, effective point-message rate(n(1− RRρ
))−1 is small.Erasure focusing bound is approximately flat at low rates so queuing delayexponent≈ − ln δρ = E0(ρ).
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 22 / 44

Performance
0
0.2
0.4
0.6
0.8
0.1 0.2 0.3 0.4 0.5 0.6Rate (in bits)
Err
or E
xpon
ent (
base
e)
List size 1 limit
List size 4 limit
List size 2 limit
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 23 / 44

Performance
0
0.2
0.4
0.6
0.8
0.1 0.2 0.3 0.4 0.5 0.6Rate (in bits)
Err
or E
xpon
ent (
base
e)
List size 1 limit
List size 4 limit
List size 2 limit
What is the price to get list-decoding gains?
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 23 / 44

How to use list-decoding
At low rates, forward error correction suffers from ambiguity.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 24 / 44

How to use list-decoding
At low rates, forward error correction suffers from ambiguity.1 Group bits into blocks of sizenR. (k ≪ n ≪ d)2 Hold blocks in a FIFO queue3 Transmit using an∞-length random codebook. (rateless code)
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 24 / 44

How to use list-decoding
At low rates, forward error correction suffers from ambiguity.1 Group bits into blocks of sizenR. (k ≪ n ≪ d)2 Hold blocks in a FIFO queue3 Transmit using an∞-length random codebook. (rateless code)4 Feedback “ACK” when we canalmostdecode.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 24 / 44

How to use list-decoding
At low rates, forward error correction suffers from ambiguity.1 Group bits into blocks of sizenR. (k ≪ n ≪ d)2 Hold blocks in a FIFO queue3 Transmit using an∞-length random codebook. (rateless code)4 Feedback “ACK” when we canalmostdecode.5 Send back anO((L − 1) log(nR)) mini-message requesting clarification of
specific bits within the block
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 24 / 44

How to use list-decoding
At low rates, forward error correction suffers from ambiguity.1 Group bits into blocks of sizenR. (k ≪ n ≪ d)2 Hold blocks in a FIFO queue3 Transmit using an∞-length random codebook. (rateless code)4 Feedback “ACK” when we canalmostdecode.5 Send back anO((L − 1) log(nR)) mini-message requesting clarification of
specific bits within the block6 Use repetition codes to clarify
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 24 / 44

How to use list-decoding
At low rates, forward error correction suffers from ambiguity.1 Group bits into blocks of sizenR. (k ≪ n ≪ d)2 Hold blocks in a FIFO queue3 Transmit using an∞-length random codebook. (rateless code)4 Feedback “ACK” when we canalmostdecode.5 Send back anO((L − 1) log(nR)) mini-message requesting clarification of
specific bits within the block6 Use repetition codes to clarify7 ACK the clarifications
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 24 / 44

How to use list-decoding
At low rates, forward error correction suffers from ambiguity.1 Group bits into blocks of sizenR. (k ≪ n ≪ d)2 Hold blocks in a FIFO queue3 Transmit using an∞-length random codebook. (rateless code)4 Feedback “ACK” when we canalmostdecode.5 Send back anO((L − 1) log(nR)) mini-message requesting clarification of
specific bits within the block6 Use repetition codes to clarify7 ACK the clarifications
A block corresponds toL point messages — low rate relative toO(n)slack.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 24 / 44

How to use list-decoding
At low rates, forward error correction suffers from ambiguity.1 Group bits into blocks of sizenR. (k ≪ n ≪ d)2 Hold blocks in a FIFO queue3 Transmit using an∞-length random codebook. (rateless code)4 Feedback “ACK” when we canalmostdecode.5 Send back anO((L − 1) log(nR)) mini-message requesting clarification of
specific bits within the block6 Use repetition codes to clarify7 ACK the clarifications
A block corresponds toL point messages — low rate relative toO(n)slack.
Approaches the focusing bound.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 24 / 44

Unreliable feedback picture
�
-Forward packet-erasure channelsδ
S1 S2 S3 S4 S5 S6
Rate1c packet-erasure feedback channelsδf
Bothchannels drop packets randomly
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 26 / 44

Unreliable feedback picture
�
-Forward packet-erasure channelsδ
S1 S2 S3 S4 S5 S6
Rate1c packet-erasure feedback channelsδf
Bothchannels drop packets randomly
Assume packets of moderate size that can have “header bits”
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 26 / 44

Unreliable feedback picture
�
-Forward packet-erasure channelsδ
S1 S2 S3 S4 S5 S6
Rate1c packet-erasure feedback channelsδf
Bothchannels drop packets randomly
Assume packets of moderate size that can have “header bits”
Assume target latencyd ≫ c, k
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 26 / 44

How to deal with unreliable feedback
Basic 4-Part Strategy:◮ Incremental transmission of message block◮ Feedbacka request for disambiguation message◮ Repetition-code the disambiguation◮ Feedbacka final ACK
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 27 / 44

How to deal with unreliable feedback
Basic 4-Part Strategy:◮ Incremental transmission of message block◮ Feedbacka request for disambiguation message◮ Repetition-code the disambiguation◮ Feedbacka final ACK
Add one header bit to forward packets◮ 0: main message packet◮ 1: first disambiguation message packet◮ 0: second disambiguation message packet
...
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 27 / 44

How to deal with unreliable feedback
Basic 4-Part Strategy:◮ Incremental transmission of message block◮ Feedbacka request for disambiguation message◮ Repetition-code the disambiguation◮ Feedbacka final ACK
Add one header bit to forward packets◮ 0: main message packet◮ 1: first disambiguation message packet◮ 0: second disambiguation message packet
...
Repetition-code thefeedback messages
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 27 / 44

How to deal with unreliable feedback
Basic 4-Part Strategy:◮ Incremental transmission of message block◮ Feedbacka request for disambiguation message◮ Repetition-code the disambiguation◮ Feedbacka final ACK
Add one header bit to forward packets◮ 0: main message packet◮ 1: first disambiguation message packet◮ 0: second disambiguation message packet
...
Repetition-code thefeedback messages
◮ Geometric service time as(δ1cf )d
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 27 / 44

How to deal with unreliable feedback
Basic 4-Part Strategy:◮ Incremental transmission of message block◮ Feedbacka request for disambiguation message◮ Repetition-code the disambiguation◮ Feedbacka final ACK
Add one header bit to forward packets◮ 0: main message packet◮ 1: first disambiguation message packet◮ 0: second disambiguation message packet
...
Repetition-code thefeedback messages
◮ Geometric service time as(δ1cf )d
Each message now acts likeO(2 + (L − 1) log(nR)) point messages.◮ Low rate relative toO(n) slack◮ As long as−1
c logδf > E0(ρ) target exponent, no loss in achievedend-to-end delay exponent!
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 27 / 44

Performance with unreliable feedback channel
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0.1 0.2 0.3 0.4 0.5 0.6 0.7
Del
ay E
rror
Exp
onen
t (ba
se e
)
Rate (in packets per slot)
Balanced forward+feedback strategy
Forward only strategy
Rat
e lim
it w
ith ro
und−
trip
qual
ity
Cap
acity
Lim
it du
e to
forw
ard
qual
ity
Naive feedback strategywith free feedback
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 28 / 44

Performance with unreliable feedback channel
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0.1 0.2 0.3 0.4 0.5 0.6 0.7
Del
ay E
rror
Exp
onen
t (ba
se e
)
Rate (in packets per slot)
Balanced forward+feedback strategy
Forward only strategy
Limited with free 1/3 rate feedback
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 28 / 44

Shared channel picture
�
-c−1
c forward packet-erasure channelsδ
S1 S2 S3 S4 S5 S6
Rate1c packet-erasure feedback channelsδ
Bothusers share a single physical channel
Half-duplex constraint: only one can use at a time
Assume we must schedule them in advance
Same erasure probability in both directions
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 30 / 44

Shared unreliable channel used for feedback
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0.1 0.2 0.3 0.4 0.5 0.6 0.7
Del
ay E
rror
Exp
onen
t (ba
se e
)
Rate (in packets per slot)
If feedback were free
Pure feedbackstrategy
Forward only strategy
1:1 split
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 31 / 44

Shared unreliable channel used for feedback
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0.1 0.2 0.3 0.4 0.5 0.6 0.7
Del
ay E
rror
Exp
onen
t (ba
se e
)
Rate (in packets per slot)
If feedback were free
feedback and forward
Pure feedbackstrategy
2:1
Forward only strategy
Dividing time slots between
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 31 / 44

Shared unreliable channel used for feedback
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0.1 0.2 0.3 0.4 0.5 0.6 0.7
Del
ay E
rror
Exp
onen
t (ba
se e
)
Rate (in packets per slot)
If feedback were free
Dividing time slots betweenfeedback and forward
Pure feedbackstrategy
2:1
4:1
8:1
Forward only strategy
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 31 / 44

Shared unreliable channel used for feedback
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0.1 0.2 0.3 0.4 0.5 0.6 0.7
Del
ay E
rror
Exp
onen
t (ba
se e
)
Rate (in packets per slot)
If feedback were free
Dividing time slots betweenfeedback and forward
Pure feedbackstrategy
2:1
4:1
8:1
Forward only strategy
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 31 / 44

Final comments on packet erasure channels
Perfect feedback performance as long as−1c logδf is high enough.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 32 / 44

Final comments on packet erasure channels
Perfect feedback performance as long as−1c logδf is high enough.
It is worth allocating slots for feedbackeven if this means taking themaway from the forward channel.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 32 / 44

Final comments on packet erasure channels
Perfect feedback performance as long as−1c logδf is high enough.
It is worth allocating slots for feedbackeven if this means taking themaway from the forward channel.
The code is “anytime” in that it is delay universal — application can pickwhat latency is needed.
The code is universal over erasure probabilities.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 32 / 44

Final comments on packet erasure channels
Perfect feedback performance as long as−1c logδf is high enough.
It is worth allocating slots for feedbackeven if this means taking themaway from the forward channel.
The code is “anytime” in that it is delay universal — application can pickwhat latency is needed.
The code is universal over erasure probabilities.
The code is mildly “broadcast-friendly.”
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 32 / 44

Final comments on packet erasure channels
Perfect feedback performance as long as−1c logδf is high enough.
It is worth allocating slots for feedbackeven if this means taking themaway from the forward channel.
The code is “anytime” in that it is delay universal — application can pickwhat latency is needed.
The code is universal over erasure probabilities.
The code is mildly “broadcast-friendly.”
Computation depends only onn, not on delay.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 32 / 44

Outline
1 Problem and Background2 Erasure channels: packet-wise hard deadlines with limited feedback3 BSC: bitwise soft deadlines with truly noisy feedback
◮ The opportunity◮ Noiseless feedback◮ Optimality since matches “Hallucination bound”◮ Noisy feedback
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 33 / 44

A streaming data perspective on soft deadlines
end−to−end delay
TxPacketizer Queue Rx
App
licat
ion
feedbackchannel
channel
App
licat
ion
data
stream
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 34 / 44

A streaming data perspective on soft deadlines
end−to−end delay
TxPacketizer Queue Rx
App
licat
ion
feedbackchannel
channel
App
licat
ion
data
stream
Queue is optional. Needed if retransmissions are required
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 34 / 44

A streaming data perspective on soft deadlines
end−to−end delay
TxPacketizer Queue Rx
App
licat
ion
feedbackchannel
channel
App
licat
ion
data
stream
Queue is optional. Needed if retransmissions are required
If retransmissions are rare, thenexpectedend-to-end delay is dominatedby the Tx to Rx delay.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 34 / 44

An opportunity presents itself
Data Blocks Nak
Acks
decodingerror
Erasures are rare so most messages are confirmed.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 35 / 44

An opportunity presents itself
Data Blocks Nak
Acks
decodingerror
Erasures are rare so most messages are confirmed.
We are wasting channel uses.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 35 / 44

An opportunity presents itself
Data Blocks Nak
Acks
decodingerror
Erasures are rare so most messages are confirmed.
We are wasting channel uses.
What if we only sentNAKs when needed?
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 35 / 44

An opportunity presents itself
Data Blocks Nak
Acks
decodingerror
Erasures are rare so most messages are confirmed.
We are wasting channel uses.
What if we only sentNAKs when needed?
Have a special message for this purpose.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 35 / 44

Sliding blocks with collective punishment only(Kudryashov-79)
decision delaydecision delayFinal decision on blue msg
(unless detect Nak)Final decision on purple msg
(unless detect Nak)
Emergency msg,fixed length = decision delayData Blocks
Make packet sizen much smaller than soft deadlined.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 36 / 44

Sliding blocks with collective punishment only(Kudryashov-79)
decision delaydecision delayFinal decision on blue msg
(unless detect Nak)Final decision on purple msg
(unless detect Nak)
Emergency msg,fixed length = decision delayData Blocks
Make packet sizen much smaller than soft deadlined.
A NAK collectively denies the pastdn − 1 packets
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 36 / 44

Sliding blocks with collective punishment only(Kudryashov-79)
decision delaydecision delayFinal decision on blue msg
(unless detect Nak)Final decision on purple msg
(unless detect Nak)
Emergency msg,fixed length = decision delayData Blocks
Make packet sizen much smaller than soft deadlined.
A NAK collectively denies the pastdn − 1 packets
Error only if dn − 1 NAKs are all missed
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 36 / 44

Unequal error protection required in codebook
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 37 / 44

Unequal error protection required in codebook
Typical noise sphere
Hypothesistestingthreshold:
or is it data?Is it a Nak
Unequal Error Protection
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 37 / 44

Specialize to BSC case
N
N0
Data Blocks
N N N
∆Nak for blocks = ∆
y
composition
q
outputcomposition
codewordBSC (p)
p
q
Gap
q (1−p) + (1−q) p0.5
1
0
Use all zero forNAK
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 38 / 44

Specialize to BSC case
N
N0
Data Blocks
N N N
∆Nak for blocks = ∆
y
composition
q
outputcomposition
codewordBSC (p)
p
q
Gap
q (1−p) + (1−q) p0.5
1
0
Use all zero forNAK
Use compositionq codefor data:R < H(q) − H(p)
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 38 / 44

Specialize to BSC case
N
N0
Data Blocks
N N N
∆Nak for blocks = ∆
y
composition
q
outputcomposition
codewordBSC (p)
p
q
Gap
q (1−p) + (1−q) p0.5
1
0
Use all zero forNAK
Use compositionq codefor data:R < H(q) − H(p)
Probability of missedNAKis 2−ND(qy||p)
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 38 / 44

Specialize to BSC case
N
N0
Data Blocks
N N N
∆Nak for blocks = ∆
y
composition
q
outputcomposition
codewordBSC (p)
p
q
Gap
q (1−p) + (1−q) p0.5
1
0
Use all zero forNAK
Use compositionq codefor data:R < H(q) − H(p)
Probability of missedNAKis 2−ND(qy||p)
Get∆ chances:2−∆ND(qy||p)
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 38 / 44

Resulting exponents
0 0.1 0.2 0.3 0.4 0.50
0.5
1
1.5
2
2.5
erro
r ex
pone
nt
average communication rate (bits/channel use)
Delay exponentBurnashev exponentForney exponentSphere packing exponent
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 39 / 44

Resulting exponents
0 0.1 0.2 0.3 0.4 0.50
0.5
1
1.5
2
2.5
erro
r ex
pone
nt
average communication rate (bits/channel use)
Delay exponentBurnashev exponentForney exponentSphere packing exponent
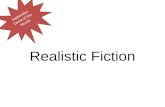
Positive error exponentD(12||p) even near capacity!
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 39 / 44

Resulting exponents
0 0.1 0.2 0.3 0.4 0.50
0.5
1
1.5
2
2.5
erro
r ex
pone
nt
average communication rate (bits/channel use)
Delay exponentBurnashev exponentForney exponentSphere packing exponent
Positive error exponentD(12||p) even near capacity!
Also far better than the focusing bound.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 39 / 44

Matches the “Hallucination Bound”
0 0.1 0.2 0.3 0.4 0.50
0.5
1
1.5
2
2.5
erro
r ex
pone
nt
average communication rate (bits/channel use)
Delay exponentBurnashev exponentForney exponentSphere packing exponent
No converse for Forney,unlike Burnashev andSphere-packing.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 40 / 44

Matches the “Hallucination Bound”
0 0.1 0.2 0.3 0.4 0.50
0.5
1
1.5
2
2.5
erro
r ex
pone
nt
average communication rate (bits/channel use)
Delay exponentBurnashev exponentForney exponentSphere packing exponent
No converse for Forney,unlike Burnashev andSphere-packing.
What about here?
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 40 / 44

Matches the “Hallucination Bound”
0 0.1 0.2 0.3 0.4 0.50
0.5
1
1.5
2
2.5
erro
r ex
pone
nt
average communication rate (bits/channel use)
Delay exponentBurnashev exponentForney exponentSphere packing exponent
No converse for Forney,unlike Burnashev andSphere-packing.
What about here?
Decoding correctlyrequires a certain “typical”volume of outputsequences
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 40 / 44

Matches the “Hallucination Bound”
0 0.1 0.2 0.3 0.4 0.50
0.5
1
1.5
2
2.5
erro
r ex
pone
nt
average communication rate (bits/channel use)
Delay exponentBurnashev exponentForney exponentSphere packing exponent
No converse for Forney,unlike Burnashev andSphere-packing.
What about here?
Decoding correctlyrequires a certain “typical”volume of outputsequences
If the channel forces you tohallucinate fordtime-steps, you aredoomed.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 40 / 44

Matches the “Hallucination Bound”
0 0.1 0.2 0.3 0.4 0.50
0.5
1
1.5
2
2.5
erro
r ex
pone
nt
average communication rate (bits/channel use)
Delay exponentBurnashev exponentForney exponentSphere packing exponent
No converse for Forney,unlike Burnashev andSphere-packing.
What about here?
Decoding correctlyrequires a certain “typical”volume of outputsequences
If the channel forces you tohallucinate fordtime-steps, you aredoomed.
With feedback, you canchoose the channel input tominimize this probability.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 40 / 44

Matches the “Hallucination Bound”
0 0.1 0.2 0.3 0.4 0.50
0.5
1
1.5
2
2.5
erro
r ex
pone
nt
average communication rate (bits/channel use)
Delay exponentBurnashev exponentForney exponentSphere packing exponent
No converse for Forney,unlike Burnashev andSphere-packing.
What about here?
Decoding correctlyrequires a certain “typical”volume of outputsequences
If the channel forces you tohallucinate fordtime-steps, you aredoomed.
With feedback, you canchoose the channel input tominimize this probability.
Matches achievability.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 40 / 44

Noisy feedback: two distinct issues
end−to−end delay
TxPacketizer Queue Rx
App
licat
ion
feedbackchannel
channel
App
licat
ion
data
stream
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 41 / 44

Noisy feedback: two distinct issues
end−to−end delay
TxPacketizer Queue Rx
App
licat
ion
feedbackchannel
channel
App
licat
ion
data
stream
Retransmission control: maintaining synchronization
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 41 / 44

Noisy feedback: two distinct issues
end−to−end delay
TxPacketizer Queue Rx
App
licat
ion
feedbackchannel
channel
App
licat
ion
data
stream
Retransmission control: maintaining synchronization◮ Can model the state of the receiver as a random walk with drift.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 41 / 44

Noisy feedback: two distinct issues
end−to−end delay
TxPacketizer Queue Rx
App
licat
ion
feedbackchannel
channel
App
licat
ion
data
stream
Retransmission control: maintaining synchronization◮ Can model the state of the receiver as a random walk with drift.◮ Unstable process, but it can be tracked using ananytimecode.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 41 / 44

Noisy feedback: two distinct issues
end−to−end delay
TxPacketizer Queue Rx
App
licat
ion
feedbackchannel
channel
App
licat
ion
data
stream
Retransmission control: maintaining synchronization◮ Can model the state of the receiver as a random walk with drift.◮ Unstable process, but it can be tracked using ananytimecode.◮ Since retransmissions are rare, can afford extra latency toallow state
estimates to converge.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 41 / 44

Noisy feedback: two distinct issues
end−to−end delay
TxPacketizer Queue Rx
App
licat
ion
feedbackchannel
channel
App
licat
ion
data
stream
Retransmission control: maintaining synchronization◮ Can model the state of the receiver as a random walk with drift.◮ Unstable process, but it can be tracked using ananytimecode.◮ Since retransmissions are rare, can afford extra latency toallow state
estimates to converge.◮ Synchronization rate is less than 1 bit per packet.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 41 / 44

Noisy feedback: two distinct issues
end−to−end delay
TxPacketizer Queue Rx
App
licat
ion
feedbackchannel
channel
App
licat
ion
data
stream
Retransmission control: maintaining synchronization◮ Can model the state of the receiver as a random walk with drift.◮ Unstable process, but it can be tracked using ananytimecode.◮ Since retransmissions are rare, can afford extra latency toallow state
estimates to converge.◮ Synchronization rate is less than 1 bit per packet.
How toNAK?
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 41 / 44

What is needed to NAK?
N
misseddetection
detectederror
N0
Forward
Reverse
Sliding window binning latency constraint (playback deadline)
Data Blocks ∆∆Nak for blocks =
∆
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
�����������������������������������������������������������������������������������������������������������������������������������������������������������������
�����������������������������������������������������������������������������������������������������������������������������������������������������������������
Must know if any errors in the sliding window.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 42 / 44

What is needed to NAK?
N
misseddetection
detectederror
N0
Forward
Reverse
Sliding window binning latency constraint (playback deadline)
Data Blocks ∆∆Nak for blocks =
∆
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
�����������������������������������������������������������������������������������������������������������������������������������������������������������������
�����������������������������������������������������������������������������������������������������������������������������������������������������������������
Must know if any errors in the sliding window.
Identification problem since encoder knows what it wants to hear.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 42 / 44

What is needed to NAK?
N
misseddetection
detectederror
N0
Forward
Reverse
Sliding window binning latency constraint (playback deadline)
Data Blocks ∆∆Nak for blocks =
∆
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
�����������������������������������������������������������������������������
�����������������������������������������������������������������������������
���������������������������������������������������������������������������������������������������
���������������������������������������������������������������������������������������������������
Must know if any errors in the sliding window.
Identification problem since encoder knows what it wants to hear.
Use a random hash of entire sliding window.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 42 / 44

What is needed to NAK?
N
misseddetection
detectederror
N0
Forward
Reverse
Sliding window binning latency constraint (playback deadline)
Data Blocks ∆∆Nak for blocks =
∆
Must know if any errors in the sliding window.
Identification problem since encoder knows what it wants to hear.
Use a random hash of entire sliding window.
Compare Pr(hash collision) with Pr(missed NAK)
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 42 / 44

What is needed to NAK?
N
misseddetection
detectederror
N0
Forward
Reverse
Sliding window binning latency constraint (playback deadline)
Data Blocks ∆∆Nak for blocks =
∆
Must know if any errors in the sliding window.
Identification problem since encoder knows what it wants to hear.
Use a random hash of entire sliding window.
Compare Pr(hash collision) with Pr(missed NAK)
If Cfb > D(qy||p), no loss in net exponent!
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 42 / 44

Feedback capacity acts as a ceiling to reliability
0 0.1 0.2 0.3 0.4 0.50
0.5
1
1.5
2
2.5
erro
r ex
pone
nt
average communication rate (bits/channel use)
Delay exp w/ noisy FBBurnashev exponentForney exponentSphere packing exp
Hash collision dominates
Missed Nak dominates
Feedback reliability gains are robust to noisy feedback.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 43 / 44

Feedback capacity acts as a ceiling to reliability
0 0.1 0.2 0.3 0.4 0.50
0.5
1
1.5
2
2.5
erro
r ex
pone
nt
average communication rate (bits/channel use)
Delay exp w/ noisy FBBurnashev exponentForney exponentSphere packing exp
Hash collision dominates
Missed Nak dominates
Feedback reliability gains are robust to noisy feedback.Open problem: does this also hold in the general hard deadline case?
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 43 / 44

Summary of reliability for symmetric channels
Hard Deadlines Soft Deadlines(undetected errors only)Bound Achievable Robust Bound Achievable Robust
Block Sphere-packing Yes trivial Burnashev Yes Mild*No FB Sphere-packing Yes trivial Telatar Forney Yes*
Delay Focusing* Partial* Partial* Hallucination* Yes Yes*No FB Sphere-packing Yes trivial Unknown
* entriesare our contributions withbold for those in this talk.
Trivial robustness is when feedback is not used at all.Partial achievability of the focusing bound is:
◮ Tight for erasure channels and all DMCs withC0,f > 0◮ Robust for packet erasure channels with erasure feedback◮ Better than sphere-packing bound for essentially all channels
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 44 / 44

Summary of reliability for symmetric channels
Hard Deadlines Soft Deadlines(undetected errors only)Bound Achievable Robust Bound Achievable Robust
Block Sphere-packing Yes trivial Burnashev Yes Mild*No FB Sphere-packing Yes trivial Telatar Forney Yes*
Delay Focusing* Partial* Partial* Hallucination* Yes Yes*No FB Sphere-packing Yes trivial Unknown
* entriesare our contributions withbold for those in this talk.
Trivial robustness is when feedback is not used at all.Partial achievability of the focusing bound is:
◮ Tight for erasure channels and all DMCs withC0,f > 0◮ Robust for packet erasure channels with erasure feedback◮ Better than sphere-packing bound for essentially all channels
Forasymmetricchannels, Haroutunian vs sphere-packing style gaps existbetween bounds and achievable codes everywhere exceptBlock, No-FB.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 44 / 44

Summary of reliability for symmetric channels
Hard Deadlines Soft Deadlines(undetected errors only)Bound Achievable Robust Bound Achievable Robust
Block Sphere-packing Yes trivial Burnashev Yes Mild*No FB Sphere-packing Yes trivial Telatar Forney Yes*
Delay Focusing* Partial* Partial* Hallucination* Yes Yes*No FB Sphere-packing Yes trivial Unknown
* entriesare our contributions withbold for those in this talk.
Trivial robustness is when feedback is not used at all.Partial achievability of the focusing bound is:
◮ Tight for erasure channels and all DMCs withC0,f > 0◮ Robust for packet erasure channels with erasure feedback◮ Better than sphere-packing bound for essentially all channels
Forasymmetricchannels, Haroutunian vs sphere-packing style gaps existbetween bounds and achievable codes everywhere exceptBlock, No-FB.
Ultimately, there should be a continuum between perfect feedback andno feedback, as well as between hard and soft deadlines.
Anant Sahai (UC Berkeley) Limited Feedback Nov 6, 2006 44 / 44