
Autonomous Surface Navigation Platform Michael Baxter Angel Berrocal Brandon Groff.
21
Autonomous Surface Navigation Platform Michael Baxter Angel Berrocal Brandon Groff
-
Upload
jasmine-sparks -
Category
Documents
-
view
224 -
download
0
Transcript of Autonomous Surface Navigation Platform Michael Baxter Angel Berrocal Brandon Groff.

Autonomous Surface Navigation Platform
Michael BaxterAngel BerrocalBrandon Groff

Project Overview
• General platform capable of autonomous navigation and adaptable to land and sea surface environments.
• Apply sensor technology for a basic navigation software foundation on which to build more complex autonomous algorithms for homeland security. Primary client is multiple branches of the US Military.
• Estimate development costs at $41,000; initial cost of a
prototype system, including instrumentation and wiring, should be less than $10,000.

Technical Objectives
Basic Autonomous Navigation • Collision Avoidance • Path Planning and Following• Propulsion System Control
Recognition of Objective• Object Color & Shape Recognition
Built Using LabVIEW & CompactRIO Platforms• Readily available• LabVIEW Vision Module is easier to use than other
solutions
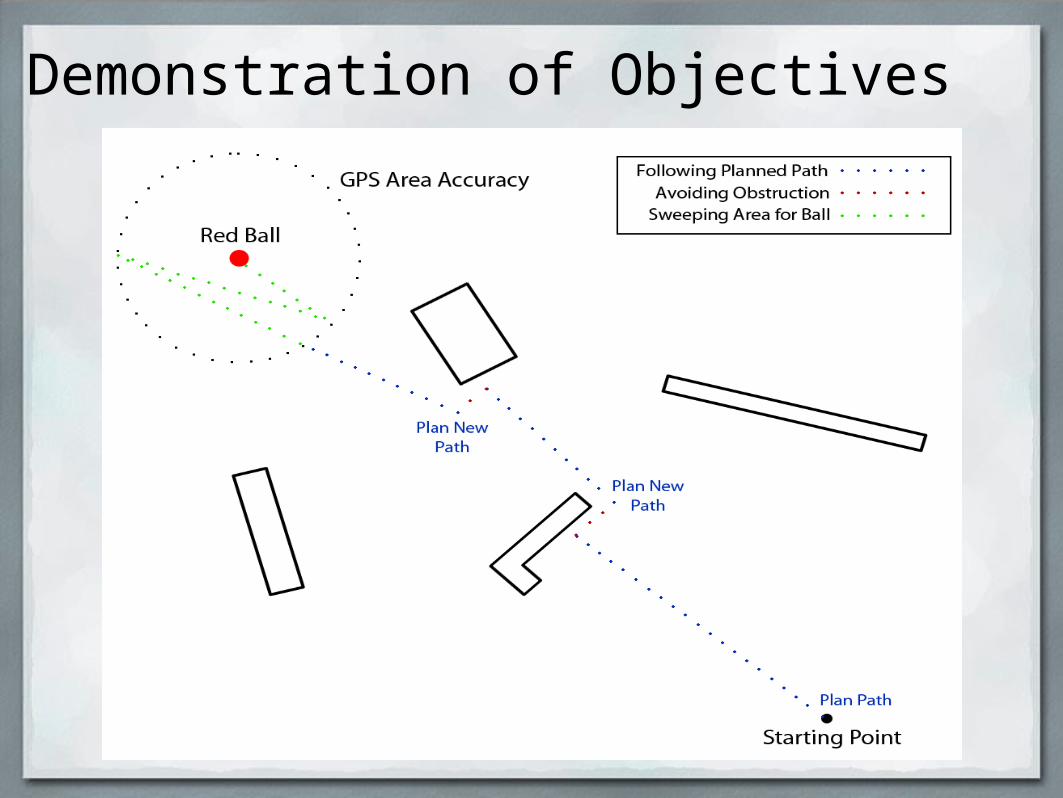
Demonstration of Objectives
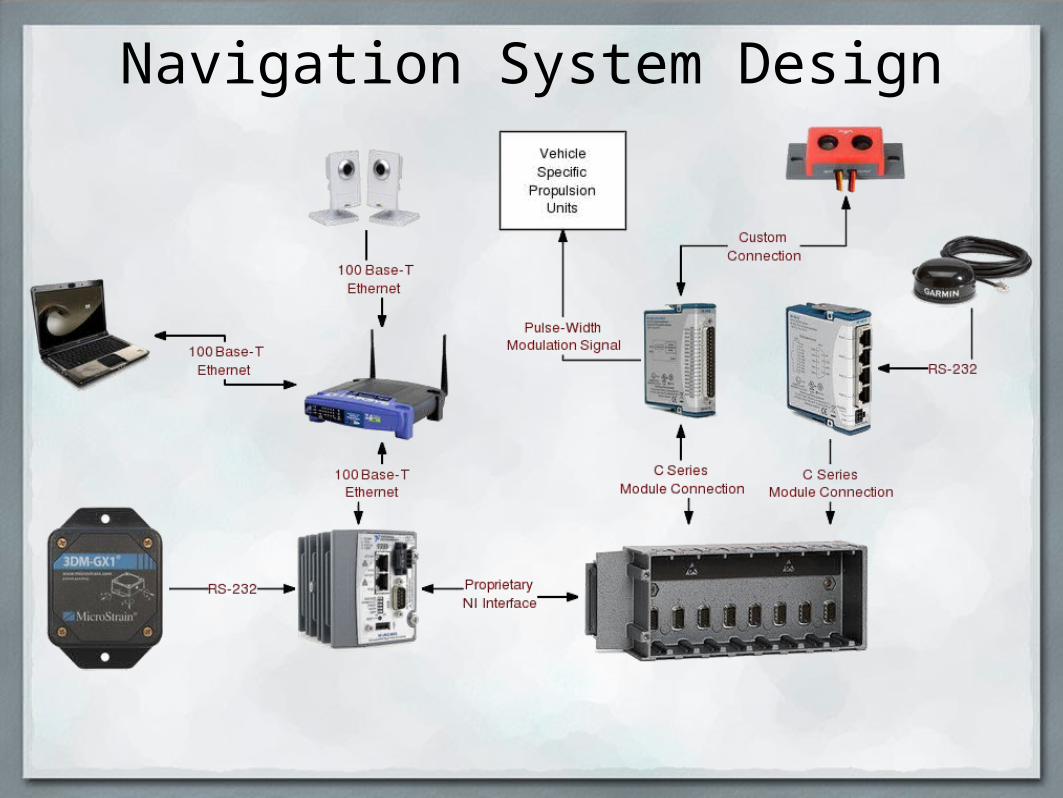
Navigation System Design
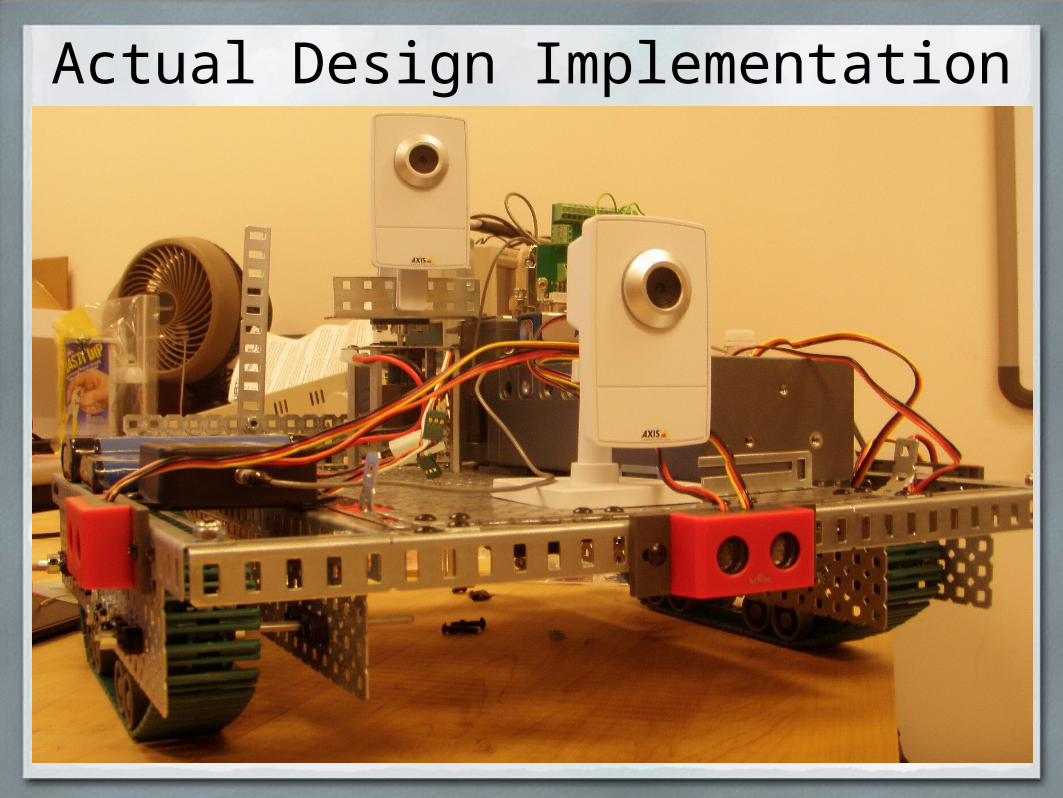
Actual Design Implementation

Overall Program Flow

Path Planning
Requirements• Enable vehicle to drive toward target object by determining
direction in which it should proceed• Requires a devices to determine the current position and
angle of the robot.o GPS Device - Determination of absolute positiono Inertial Motion Unit (IMU) - Information about robot yaw
• Software & Interface Requirementso LabVIEW 2009o CompactRIO Serial Module for GPS Interface
• Caveatso GPS Module has accuracy of 3 meters or less using Wide
Area Augmentation System (WAAS)

Path Planning Algorithm

Path Following
Requirements• Must allow robot to follow a planned path• May initiate object avoidance while following path• Needs sensors to track current heading, and watch for
potential obstacleso IMU - Track heading can be reused from Path Planningo Vex Sonar - obstacle detection & avoidance
• Trade offso Shaft Encoder - Less expensive, require more
programming, propulsion-system dependent

Path Following Algorithm

Collision Avoidance
Requirements• Autonomous navigation without collisions which may stop,
damage or otherwise hinder the vehicle's movement• Requires sensor for detection of distances to objects
o Laser Range Finders - very expensiveo Vex Ultrasonic Sonar - very cheap and available
• Software Requirementso LabVIEW 2009o LabVIEW FPGA Module (sonar interface)
• Caveatso Cheaper sensors require better software

Collision Avoidance Algorithm

Object Search & RecognitionRequirements• 360-degree view to scan for possible object color and shape
recognition• One camera facing forward and one facing backward for
improved search time• Requires two cameras that are compatible with micro-
controller CompactRIOo Axis M1011 Ethernet cameras can be used
simultaneously with CompactRIOo Wireless-G Linksys Router 2.4 GHz
• Software Requirementso LabVIEW 2009 & LabVIEW Vision Development Module
• Caveatso Better cameras with higher resolution are costlyo Low resolution requires better image processing

Object Search
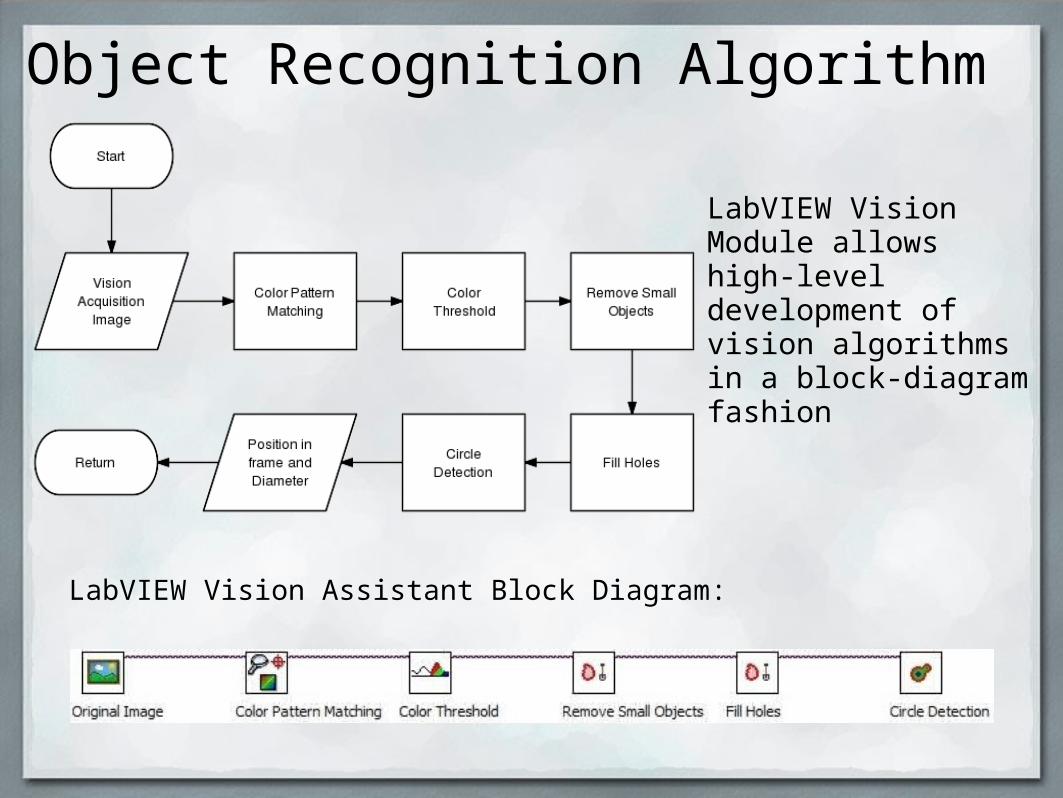
Object Recognition Algorithm
LabVIEW Vision Assistant Block Diagram:
LabVIEW Vision Module allows high-level development of vision algorithms in a block-diagram fashion
Propulsion System Control
Requirements• Must be able to control Thrusters for marine vehicles as well
as Vex motors for land demonstration• Both use 1-2 ms Pulse-Width Modulation signals• Requires hardware interface between LabVIEW and
propulsion systemo CompactRIO Digital I/O Module
• Software Requirementso LabVIEW 2009o LabVIEW FPGA Module
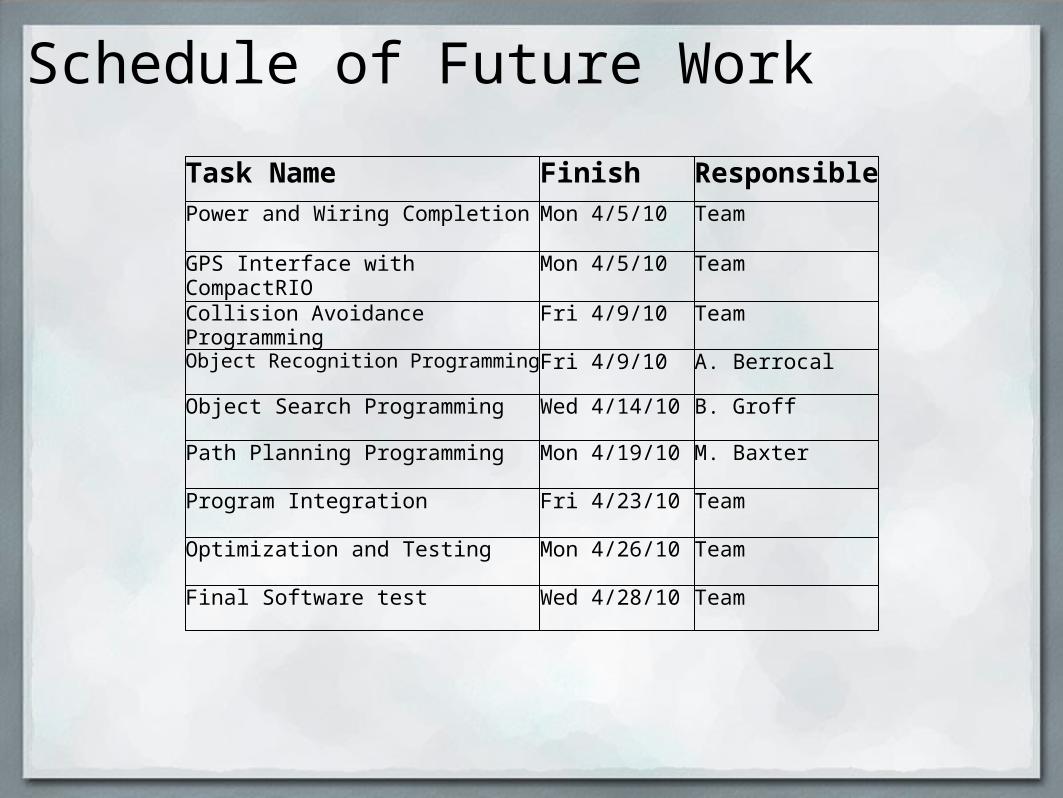
Schedule of Future Work
Task Name Finish ResponsiblePower and Wiring Completion Mon 4/5/10 Team
GPS Interface with CompactRIO Mon 4/5/10 Team
Collision Avoidance Programming Fri 4/9/10 Team
Object Recognition Programming Fri 4/9/10 A. Berrocal
Object Search Programming Wed 4/14/10 B. Groff
Path Planning Programming Mon 4/19/10 M. Baxter
Program Integration Fri 4/23/10 Team
Optimization and Testing Mon 4/26/10 Team
Final Software test Wed 4/28/10 Team

Design Issues
GPS Device• Payment issues purchasing first GPS CompactRIO module• Received a pledge for a donated GPS CompactRIO module
from Marine Innovations, however their driver appeared to be for an old version of LabVIEW
• Package from Marine Innovations showed up empty• Just purchased a Garmin stand-alone unit with serial
interface
Vex sonar inaccuracies• Sonars are relatively cheap and often provide inaccurate
readings - requires averaging and filtering of data

Summary of current status of project
Vehicle Status• Test platform assembled• Motors, Cameras, Router, IMU, Sonars, and cRIO mounted• Garmin GPS has not arrived, driver available from National
Instruments• Power Plan designed - 24V & 7.2V batteries with 2 DC-DC
converters
Algorithm Status• Able to gather usable data from sonars, cameras, and IMU • Object recognition algorithm successfully differentiates
between similar objects indoors and determines distance to object
• Successful propulsion system control with cRIO

LabVIEW Test Program Example














![[Mcgraw-hill] Resistencia de Materiales - Ortiz Berrocal, Luis](https://static.fdocuments.us/doc/165x107/56d6bf141a28ab301694ca1b/mcgraw-hill-resistencia-de-materiales-ortiz-berrocal-luis.jpg)
