Autonomous Following RObot Critical Design Revie · Autonomous Following RObot Critical Design...
31
Autonomous Following RObot Critical Design Review James Tse (Leader) Wei Dai Travis Frecker Peter Verlangieri Professor John Johnson ECE 189A Fall 2012
-
Upload
truongkhuong -
Category
Documents
-
view
215 -
download
1
Transcript of Autonomous Following RObot Critical Design Revie · Autonomous Following RObot Critical Design...

Autonomous Following RObotCritical Design Review
James Tse (Leader)Wei Dai
Travis FreckerPeter Verlangieri
Professor John JohnsonECE 189A Fall 2012

Critical Design Review: Project Description
● A robot that follows and traces existing lines.● Applications:
○ Redrawing existing sports fields, e.g. basketball, tennis, football, soccer
○ Repainting fading street lines○ Perimeter security○ Warehouse item retrieval/storage

Critical Design Review: Project Description (II)
● Base proof of concept goals: ○ Following a line with high precision and accuracy.○ Using a set of rules to be able to find and trace
existing lines, without user input.○ Navigating to specific coordinates of a grid.
Critical Design Review: Project Description (III)
● Combination of sensors and positioning systems:○ IR Sensors○ Sonar○ Reflectance Sensor Array○ Digital Compass○ Rotary Encoders

James (leader) - schematic/PCB, optical sensorWei - schematic/PCB, digital compassTravis - mechanical - servo, reflective sensor, powerPeter - mechanical - motors,wheels, rotary encoders, power
All: chassis design/fabrication, schematic, processor
Critical Design Review: Subsystem Development Responsibility

Critical Design Review: Block diagram

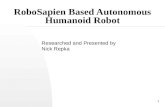
Critical Design Review: Basic Design
1. Reflectance Sensor Arrays2. Ultrasonic/IR Sensors3. Freewheels4. Wheels5. Rotary Encoders6. Processor, SDRAM, compass, motor controller.

Critical Design Review: Chassis Design
● NXP LPC2478 ARM7 Processor○ External memory interface○ Integrated ADC○ I2C Bus○ PWM Output○ UART
Parts: Processor

● Micron 16bit 128Mb SDRAM○ 2 MEG X 16 X 4 BANKS○ 54-PIN TSOP Package○ Connects to LPC2478 external memory interface
Parts: SDRAM

Parts: Reflectance Sensor Arrays
● 2 x QTR-8RC Reflectance Sensor Array○ 16 total IR Emitters/Detectors will allow us to
detect the lines.○ Consistently polled by the processor○ Sensing distance: 3-9.5mm to ground○ Direct digital interface to processor through GPIO○ Metal Shade will go over them to minimize effects
of ambient light.

Parts: Digital Compass
● LSM303DLHC High Performance E-Compass○ Outputs heading via I2C○ 5V voltage only○ Polled by processor

● The servo is used to position a marker for drawing lines.
● HS-55 Micro Servo Motor○ 3-5V Operation○ PWM Enable control signal from processor○ Running Current: 150mA○ Idle Current : 5.4mA○ $9.99
Parts: Servo Motor

● Sharp GP2Y0A21YK0F IR Range Sensor○ Object avoidance ○ Detects objects of distance from 10cm to 80cm (4''
to 32'').○ Output: Analog to Digital ○ 4.5 - 5.5V, supply current: 30mA○ Data Polled by processor
Parts: IR sensor

● Maxbotix LV-MaxSonar-EZ0○ Object avoidance○ Detects objects of distance from 0 to 6.45 meters.
(0 to ~21 ft).○ RS-232○ 2.5 - 5.5V, at 5V - 3mA○ Polled by processor
Parts: Ultrasonic Sensor
● 2x Pololu 12V Metal Brushless DC Gear Motors○ 67:1 Gear Ratio○ 250mA Free-Run Current○ Forward/Backward/Brake/Pivot○ 75rpm free run speed○ 0.40m/s using 100mm diameter wheels.
Parts: Motors
● Rotary encoders provide feedback to the microprocessor via GPIO.
● Frequency of output signal provides speed of the motor and distance traveled.
● Using encoders on both the right and left wheel allows the microprocessor to calculate and correct offset in traveling in the straight line.
Parts: Rotary Encoders

● Acts as intermediate device between processor, power supply and motors.
● Provides the high voltage and current requirement the motors need and protects the processor from back EMF
● Solarbotics L298 Compact Dual Motor Driver Kit○ Two independent PWM enable signals○ 4 GPIO logic singles control rotational direction
Parts:Motor Controller
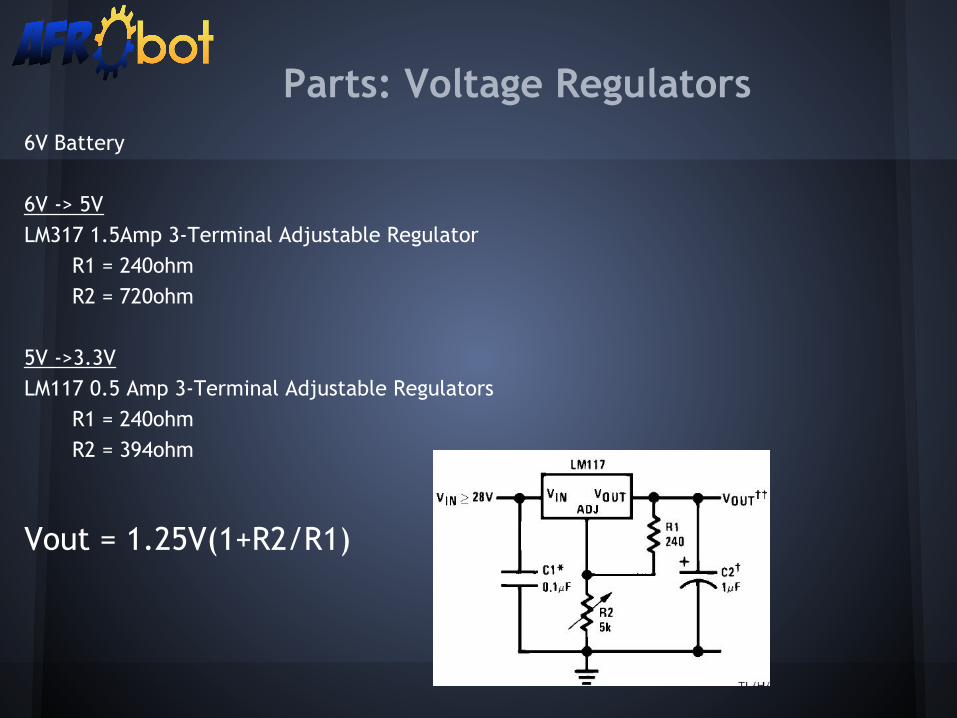
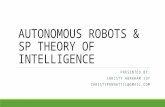
6V Battery
6V -> 5VLM317 1.5Amp 3-Terminal Adjustable Regulator
R1 = 240ohmR2 = 720ohm
5V ->3.3VLM117 0.5 Amp 3-Terminal Adjustable Regulators
R1 = 240ohmR2 = 394ohm
Vout = 1.25V(1+R2/R1)
Parts: Voltage Regulators

● All of the peripherals will be mounted onto chassis.● Jumper cables will be used to attach the devices to
connectors on the board.○ Cost!!○ Ability to rearrange parts on chassis and test
individual device.
Parts: Connectors

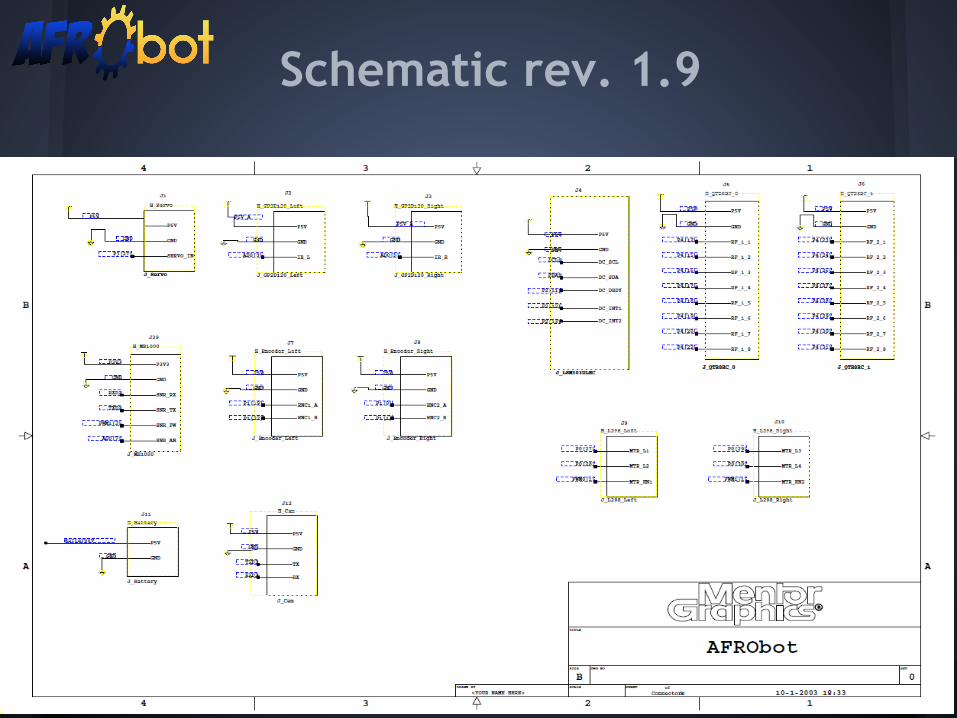
Schematic rev. 1.9

Schematic rev. 1.9
Schematic rev. 1.9

Schematic rev. 1.9

Schematic rev. 1.9

Schematic rev. 1.9

Schematic rev. 1.9

Critical Design Review: Bill of Materials
Quantity Part Unit Cost Total Cost
1 Digital compass $19.95 $19.95
2 Reflectance sensor array $14.94 $29.88
1 Ultrasonic sensor $26.95 $26.95
3 IR Sensor $13.89 $26.90
2 Motor and Rotary Encoders $39.95 $79.90
1 Motor Controller $18.28 $18.28
1 Servo Motor $9.99 $9.99
Voltage Regulators, Passive Components ~$30.00
Connectors ~$20
Chassis, Wheels, Mechanical Component, Batteries ~$100
Total $361.85

Software:○ GCC toolchain:
■ Yagarto ■ WinARM■ GNUARM
○ QP-Nano ARM7 Framework○ Eclipse
Critical Design Review: Software Overview
● Motor control ○ Keeping the bot in a straight path to avoid rough
traces.● Reflectance Sensor Array
○ Being able to detect a line in an outdoor environment and use that data to accurately position AFRObot.
Critical Design Review: Critical Elements

Questions?Suggestions?
![[ , ] Autonomous Human Robot Interactive Skills](https://static.fdocuments.us/doc/165x107/577cc35f1a28aba71195d883/-autonomous-human-robot-interactive-skills.jpg)