
Autonomous Cargo Transport System for an Unmanned Aerial Vehicle, using Visual Servoing Noah Kuntz...
21
Autonomous Cargo Transport System for an Unmanned Aerial Vehicle, using Visual Servoing Noah Kuntz and Paul Oh Drexel Autonomous Systems Laboratory Drexel University, Philadelphia, PA
-
Upload
easter-james -
Category
Documents
-
view
220 -
download
1
Transcript of Autonomous Cargo Transport System for an Unmanned Aerial Vehicle, using Visual Servoing Noah Kuntz...

Autonomous Cargo Transport System for an Unmanned Aerial Vehicle, using
Visual Servoing
Noah Kuntz and Paul Oh
Drexel Autonomous Systems Laboratory
Drexel University, Philadelphia, PA

Motivation
Helicopter cargo transport requires dangerous sling-load attachment maneuvers
Cargo must often be delivered to high risk areas, endangering the crew
HOWEVER
Helicopter cargo transport using allows delivery of payload to otherwise unreachable areas
Pictures source: http://www.mccoy.army.mil/ReadingRoom/Triad/06112004/Sling-load%20Sinai.htm
UAVs CAN FIX THIS!
Potential Cargo
Medicine Specialized parts or tools for in-field repair UGVs for bomb disposal or surveillance
Such as the Bombot, a low cost compact bomb disposal robot manufactured by the West Virginia High Technology Consortium (WVHTC) Foundation
Left picture source: http://robotgossip.blogspot.com/2006/01/bombot-to-be-built-in-west-virginia.html

Helicopter Cargo Carrying Tests
Test cargo was a small remote control UGV, for potential UGV/UAV teaming missions
Computer controlled takeoff, flight, and landing Demonstrated suitability of the SR-100
unmanned helicopter for light cargo transport
SR-100 platform proves capable

Cargo Carrying Methods
Fixed Cargo Bay CONs – Requires landing, limited cargo size,
decrease in maneuverability PROs – Cargo is protected and stable
Sling Load CONs – Oscillation danger, difficult attachment PROs – Common, allows diverse cargo
Actuated Hook CONs – Limits weight of cargo PROs – Can provide active damping, allows
autonomous attachment
Actuated Hook Wins for Unmanned Heli
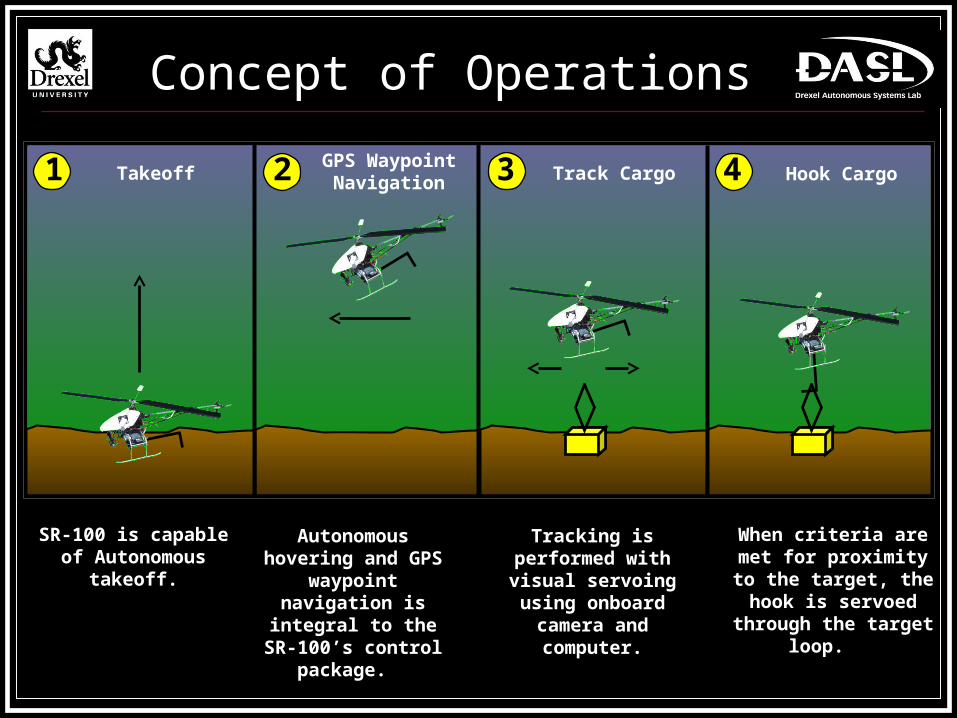
Concept of Operations
SR-100 is capable of Autonomous
takeoff.
Autonomous hovering and GPS
waypoint navigation is
integral to the SR-100’s control
package.
Tracking is performed with visual servoing using onboard
camera and computer.
When criteria are met for proximity to the target, the hook is servoed
through the target loop.
1 Takeoff 2 GPS Waypoint Navigation 3 Track Cargo 4 Hook Cargo

Concept of Operations
5 Increase Altitude
6 GPS Waypoint Navigation
Unhook Cargo7
The cargo will be set on the ground
and the hook retracted.
The cargo will then be lifted off the
ground.
GPS navigation will occur again.
Technical Requirements
Accurate tracking in all lighting conditions
Reliable cargo pickup
Weight within capability of the helicopter

Research Path
Establish load carrying ability of unmanned helicopter platform
Set up hardware-in-the-loop simulation environment for testing and evaluation
Develop the cargo pickup system in test environment
Refine system and retest
Flight test the system, for verification and validation

Challenges
Overall “Mobile Manipulation” problem
Tracking target under variant lighting
Tracking while helicopter wanders
Servoing the hook fast enough
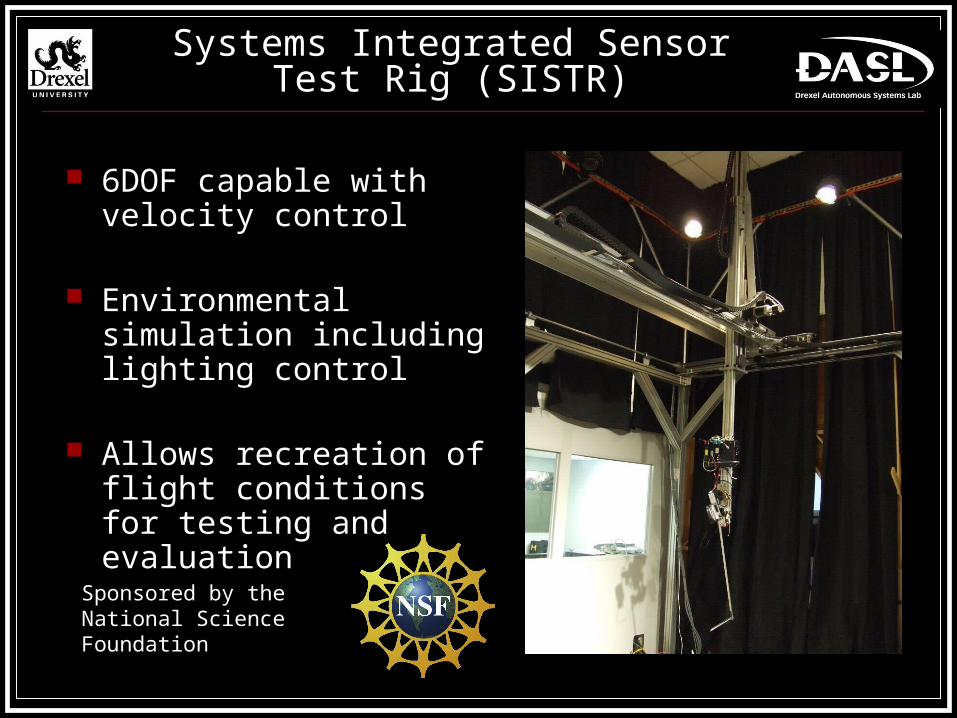
Systems Integrated Sensor Test Rig (SISTR)
6DOF capable with velocity control
Environmental simulation including lighting control
Allows recreation of flight conditions for testing and evaluation
Sponsored by the National Science Foundation
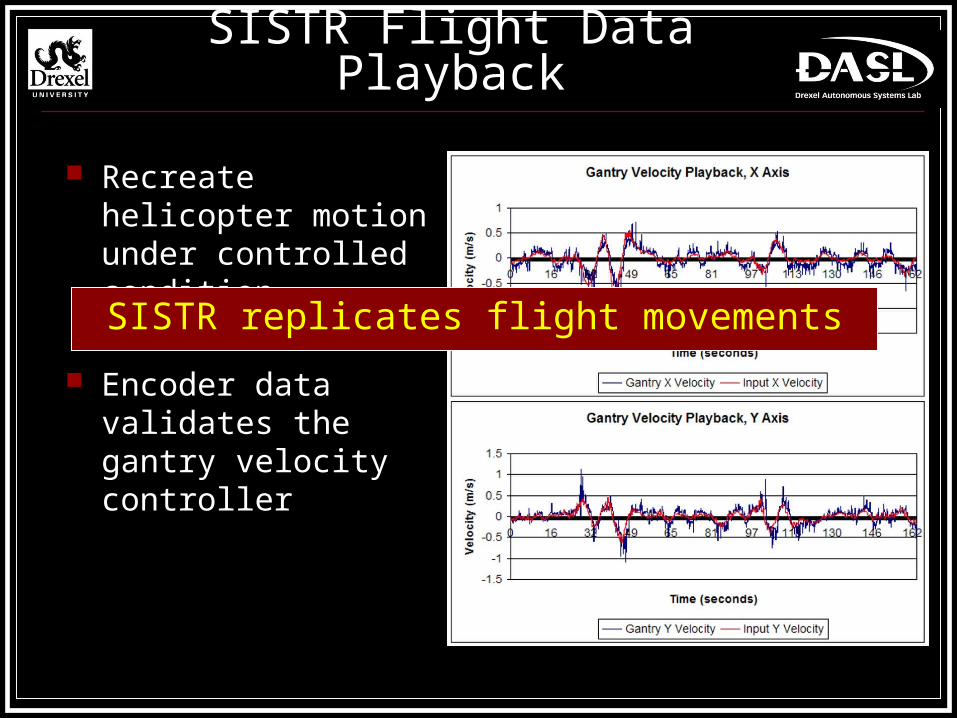
SISTR Flight Data Playback
Recreate helicopter motion under controlled condition
Encoder data validates the gantry velocity controller
SISTR replicates flight movements
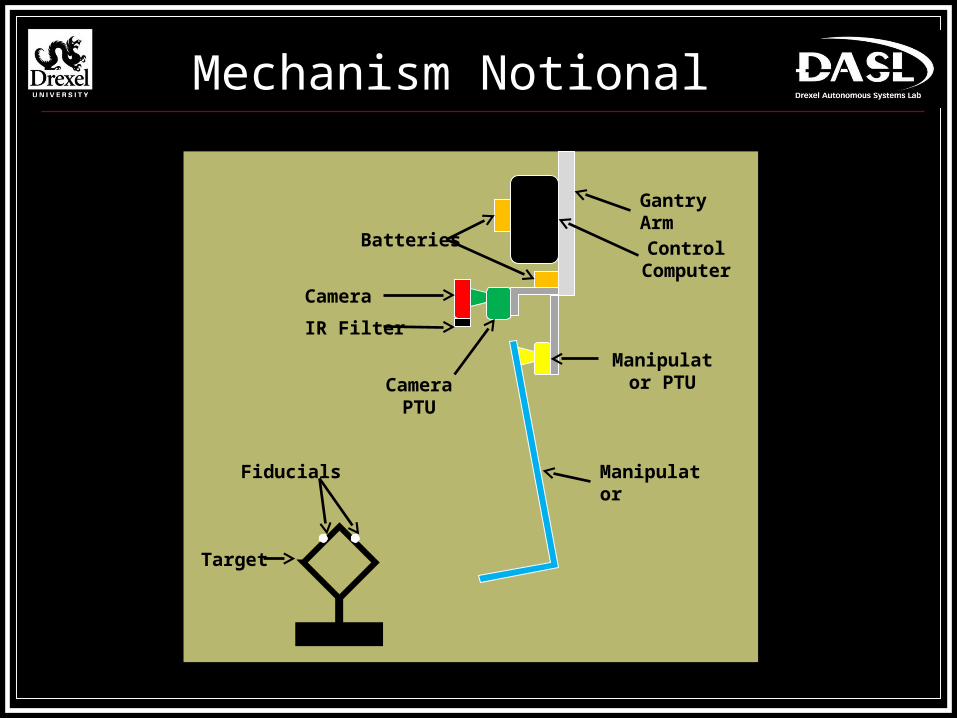
Mechanism Notional
Gantry Arm
Control Computer
Manipulator PTU
Target
Fiducials
Camera
IR Filter
Camera PTU
Manipulator
Batteries

Mechanism
2DOF stepper motor camera PTU for high speed and precision
2DOF hook PTU for high torque, low cost, and light weight
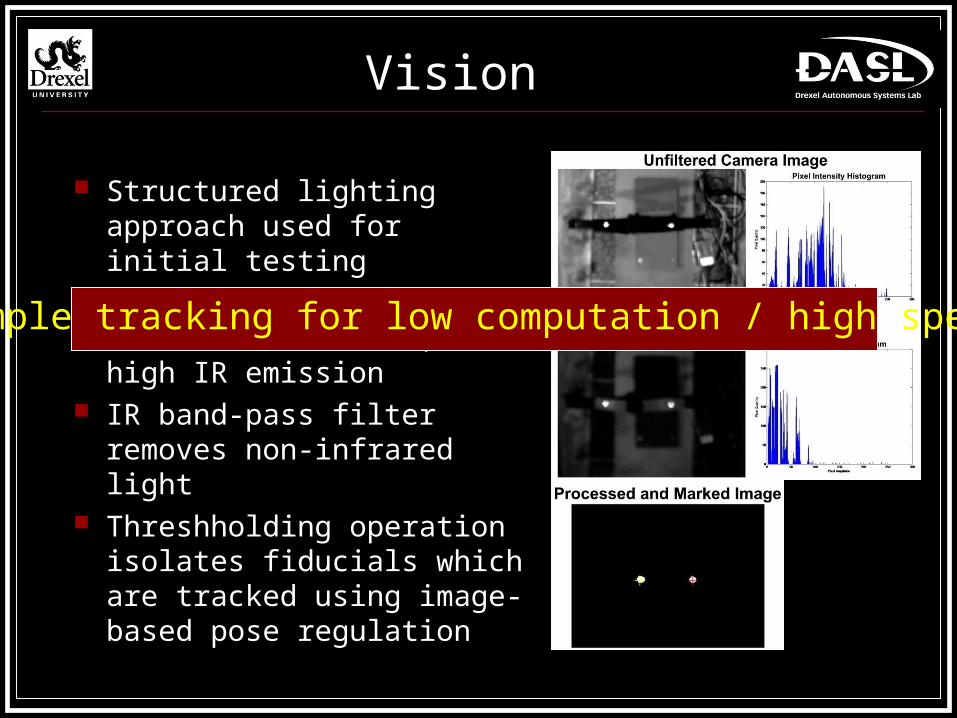
Vision
Structured lighting approach used for initial testing
Target uses krypton bulbs as fiducials, with high IR emission
IR band-pass filter removes non-infrared light
Threshholding operation isolates fiducials which are tracked using image-based pose regulation
Simple tracking for low computation / high speed

Controller
Control Computer Mini-ITX single board computer Solid state drive for vibration resistance

Testing Procedure
Gantry replays recorded helicopter velocities Target is placed in each of nine positions within 20 cm
(GPS accuracy) from ideal
Testing

Results
Near-miss conditions could be eliminated Success rate of ~83% should be possible with minor
improvements Closed loop pickup detection will improve

Contributions + Future Work
Objectives Met Accurate tracking in all lighting conditions
Tracking demonstrated under most difficult condition
Consistent cargo pickup 61% - work in progress
Weight within capability of the helicopter ~ 15 lbs, within 20 lb limit
Results will be confirmed with flight tests

Acknowledgements
National Science Foundation US Army Telemedicine Advanced
Technology Research Center (TATRC) Piasecki Aircraft Inc
For more info please see: http://www.pages.drexel.edu/~nk752/


















