Autonomic Subsystems for Cognition in Passive Coherent Location

of 5
-
Upload
subekti767514 -
Category
Documents
-
view
11 -
download
0
description
Autonomic Subsystems
Transcript of Autonomic Subsystems for Cognition in Passive Coherent Location
-
5/21/2018 Autonomic Subsystems for Cognition in Passive Coherent Location - slidep...
http:///reader/full/autonomic-subsystems-for-cognition-in-passive-coherent-
Autonomic Subsystems for Cognition in Passive
Coherent Location
Michael Inggs,Gunther Lange, Yoann Paichard
Department of Electrical Engineering, University of Cape Town,Rondebosch 7701, South Africa
Email: [email protected]
AbstractIn a previous paper [1] we mentioned that Pas-sive Coherent Location (PCL) can be thought of as CognitiveRadar[2]. The deployment of PCL systems (also known asPassive Bistatic RadarPBR) is fraught with difficulty, even inthe situation of a spatially static network of transmitters andreceivers. It is well known that PCL systems have to take intoaccount the strong, direct signals of cooperative and opportunistictransmitters used, and try to use terrain or antenna nulls[3]to mitigate the receiver dynamic range requirements. Receiverposition in the terrain also influences the coverage. This results
in a complex planning environment requiring propagation pre-diction tools to assist in selection of the best site [4]. The situationbecomes worse when the network of transmitter and receiversbecomes dynamic. In this paper, we discuss the cognition andnetworking requirements for PCL systems consisting of movingtransmitters and receivers, forming a cognitive, sensor network.We show that a sensible approach would use the structure ofhuman intelligence, which consists of a higher level integratingfunction, together with autonomic[5], lower level, subsystems.
I. INTRODUCTION
PCL type radars utilise electromagnetic emissions from
transmitters of opportunity or commission. This is similar
to the Cognitive Radio concept [6]. In cognitive radio, for
example, it was postulated that handsets could cooperate inrelaying of signals between peers, forming ad hoc networks,
that would rendezvous in clear spots in the spectrum in which
the network was immersed. In addition, the network of closer
spaced peers would use considerably less power using peer
to peer interconnection and relaying. Handsets would require
significant cognition capability to carry out this dynamic
organisational adaption.
Cognitive Radar[2] has been discussed by Haykin in terms
of improving the performance of radar systems, especially
in the area of tracking performance. In our paper, we are
taking a more fundamental look at the architecture of a PCL
radar system and seeing how the organisation of the human
nervous system might have useful analogues with the design
of these systems. We note that the growing field of Networked
Radar sensors, and existing systems such as Air Traffic Control
(ATC) have much in common with this proposed paradigm.
In our previous paper [1] we argued that a spatially dis-
tributed network of transmitters and receivers attempting to
provide target detection over a region of interest would need
to be cognitive i.e.decide which transmitters and receivers
would provide optimum coverage of an area of interest. The
fixed nature of the network considered in this earlier work,
however, means that the cognition was limited to adaption
i.e. dealing with the loss of transmitters and / or receiver
(due to maintenance or to enemy action), and, for the tracking
problem, deciding on the optimum input data to the tracking
filter. Most importantly, the planning of the network was
once-off operation, followed by command and control from
the central node, to obtain target plots for tracking purposes
In this paper, we discuss in more depth, the networking
issues of such a spatially distributed, moving, PCL systemand the more comprehensive adaption that will be required i
the transmitters and receivers are no longer stationary. In thi
case, even the interconnection will become complex, due to
line of site changes with time. It will be seen that emulation
of the autonomic subsystems of living organisms would b
a good model i.e. the effective operation of the system i
split between a higher level intelligence, and a lower level
autonomic systems, that are self-organising.
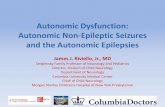
In Section IV we investigate the key elements of a Cognitive
PCL system, depicted in the cartoon system block diagram
(Figure 1). In this section we indicate the important an
variable parameters of these components, targets and th
propagation environment in which they operate. We allow thesubsystems to operate autonomically, supplying higher leve
information to the cognition system, rather than lower leve
data (e.g. raw plots).
Section IV discusses the cognition process that would need
to take place at node level versus system level. The analogy
here is with a higher order living organism, where autonomic
subsystems are responsible for lower level, detailed operation
and the brain coordinates at a higher level. We need to review
the current understanding of intelligence, and this is the subjec
of Section II. We show that the capabilities of the human mind
are partially understood, and are a summation and overlaying
of primordial nervous systems.
I I . EVOLUTION AND OURU NDERSTANDING OFH UMAN
INTELLIGENCE
In this section we discuss (very briefly) our understanding
of the functioning of higher level intelligence, as embodied in
the human brain and its allied systems[7]. Clearly the under
standing of human intelligence is a current area of research
and the development of new brain scanning technology i
assisting with this. It is beyond the scope of the paper t
give a full description of the theories and conjecture of how
978-1-4244-5812-7/10/$26.00 2010 IEEE 1317
-
5/21/2018 Autonomic Subsystems for Cognition in Passive Coherent Location - slidep...
http:///reader/full/autonomic-subsystems-for-cognition-in-passive-coherent-
Fig. 1. Cartoon description of a cognitive PCL system, consisting of multiple transmitters and receivers, spatially distributed, and operating over a widfrequency range. We see data links linking receivers to a remote controller. For simplicity we have left out the links directly between receivers, and alspossible controlled transmitters, which can be fixed or moving.
human intelligence became the pinnacle of living intelligence.
However, examination of lower orders gives and insight as to
how human intelligence evolved.
Simple organisms have a rudimentary intelligence, sufficient
for survival. These are largely hard-wired and inflexible,
providing enough control to ensure harvesting of food for
existence, growth and reproduction. As we move up the scaleof organism complexity, capabilities such as movement enter
the picture, and the rudimentary animal now has the capability
of sensing predators, and taking evasive action to avoid being
eaten. This action is instinctive and inflexible. The steps in the
response are genetically programmed.
Moving upwards in the hierarchy of intelligent animals,
the animal may have developed methods of retaliating, and
the nervous system must now make a decision whether to
stand and fight, the so-called, flight or fight decision. Again,
this can a largely be genetically programmed, or, become
deliberate and adaptive, as the animal represents a higher form
of intelligent life.
The complexity of responses may be difficult to ascribe
to mere genetic programming, but one must remember that
the principle of evolution is that only those animals with the
response most lively to ensure nutrition, growth, reproduction
and the ability to avoid destruction will survive. It is thought
that human intelligence has evolved in waves, and that the
higher level capabilities are wrappers over the primordial
systems[7], [8]. This is interesting in that it indicates in the
very powerful structure of human intelligence, the system
engineering has been evolutionary, and that certain basic
functions have carried through and form part of this mor
capable system, and that the powerful forces of evolution have
not eradicated them.
We should thus look carefully at the structure of human
(and lesser) intelligences, and when establishing the functiona
and performance requirements of new sensors, see what w
can learn from the distribution of processing in these evolvedintelligences. In the next section, we briefly discuss cognition
and our attempts to understand human intelligence. We then
move to look at one of the primordial subsystems of the human
nervous system i.e. the autonomic nervous system, which we
propose might have many lessons in the design of a rada
sensor, especially a network of such systems.
The understanding of human cognition has gone through
a number of evolutions, and the state of this understanding
(now known as cognitive science is not in a rosy state[9]
Dupuy[9] believes that the start of modern cognitive science
lies in a series of meetings (The Macy Meetings) held between
1948 and 1953 to discuss a topic known as cybernetics. Thes
meetings involved some of pre-eminent engineers, scientistand mathematicians of the time, and sought to understand
the mechanisation of human intelligence. Dupuy then paint
a picture of controversy and a lack of real delivery by th
field, which avoids its cybernetics origins and has moved on
to carry the cognitive title. Beyond the scope of this pape
is an interesting discourse by Dupuy on the achievements and
failures of cognitive science.
The message to be carried out of this is probably that rada
systems thinkers are not going to gain a large insight into how
978-1-4244-5812-7/10/$26.00 2010 IEEE 1318
-
5/21/2018 Autonomic Subsystems for Cognition in Passive Coherent Location - slidep...
http:///reader/full/autonomic-subsystems-for-cognition-in-passive-coherent-
to implement of cognition in radar systems, but certainly, the
achievements of medical science in understanding the physical
architecture of the human physiology do provide us with
structural inspirations. How cognition is actually implemented
is the controversial issue.
In the next section we give a brief overview of autonomic
systems and then, the operation of a PCL system.
III. AUTONOMICS YSTEMS
An detailed description of the human brain and its subsys-
tems is beyond the scope of this paper, but a good overview is
given by Gibb[7]. The purpose of this paper is to lift out the
autonomic system of the brain, which we believe to be very
applicable to a network of PCL radar receivers, as described
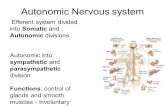
in Section IV. Figure 2 is a schematic view of the human
autonomic system.
The autonomic nervous system of many organisms (ANS
or visceral nervous system) consists of sensory (afferent) and
motor (efferent) subsystems[5]. These functions are largely
autonomous. For example, the spine of most animals is re-
sponsible for much of the detailed motion of limbs, receivingonly high level triggers from the brain itself. Similarly, the
stomach carries out digestion largely unsupervised, releasing
complicated sequences of digestive chemicals and informing
the brain of needs and problems.
In the human nervous system, the autonomic system is
connected to the hypothalamus, and represents the primordial,
instinctive nature of humans. Only high level commands from
the hypothalamus are connected through the amygdala to the
brain (to simplify the real situation). In a cognitive PCL,
the sensors themselves would be considered as afferent, and
we do not seem to have any significant examples of efferent
subsystems, unless the transmitters and receivers used their
platforms to make changes in position to improve sensing.For example, a standoff transmitter could move itself in space
or frequency to improve coverage. This thinking (i.e. mobile
PCL) is beginning to be interesting.
Work that has much in common with the discussion around
cognition in PCL is the topic of autonomic computing pro-
posed by IBM in 20031. They define the concept through eight
characteristics2 which seem to be discussing the cognitive
behaviour of the system through autonomic operation. Some
of the important characteristics of the computing system using
autonomic subsystems relate to:
1) The system must know about its elements, and what
resources can be marshalled.2) The system must be able to reconfigure itself to deal
with changing environments, but optimising the use of
its elements.
3) It should be able to heal itself by replacing or recon-
figuring remaining resources after a loss of resources (in
our case, transmitters and receivers).
4) It should try and protect its assets.
1http://www.research.ibm.com/autonomic/index.html2http://www.research.ibm.com/autonomic/overview/elements.html
Fig. 2. Schematic view of the human autonomic system, showing the sensoand motor subsystems and their connection to the brain. (adapted from GrayAnatomy)
We now move on to discuss a PCL system in terms o
the functionality of autonomic systems. This will mean tha
the autonomic PCL system will be responsible for adapting
itself to obtain optimum information for the higher leve
systems. This is especially important in terms of minimising
data transfer between individual nodes and the higher orde
command and control system.
IV. PCL NETWORKD ESCRIPTION ANDL INK TO
AUTONOMICS YSTEMS
To restrict the scope of this paper, we consider PCL
networks tasked with tracking airborne targets. It the widecontext, the discussion could concern any network of sensor
detecting objects of interest and reporting to a higher level in
the observation system. However, we postulate that the PCL
sensor network autonomously adapts itself to provide optimum
data to the cognitive, higher level, system.
The functions that could be combined to form autonomic
subsystems are described in the following subsections. W
also describe some of the capabilities that the subsystems tha
would be needed.
978-1-4244-5812-7/10/$26.00 2010 IEEE 1319
-
5/21/2018 Autonomic Subsystems for Cognition in Passive Coherent Location - slidep...
http:///reader/full/autonomic-subsystems-for-cognition-in-passive-coherent-
A. Predicting Sensor Performance
Transmitters and receivers need to be correctly placed, or,
to decide which other sensors with which to network. In
a previous work [10], [4], and a paper in this conference
[3], we detail how it is possible to predict quantitatively the
coverage of a transmitter / receiver pair. The method needs
to know either the position of a target, or, the volume /
surface that defines its movement. The method uses terrainmaps and propagation modelling to measure this. Using this
method, each receiver can decide which transmitter to utilise,
at which frequency, and at which position. Similarly, mobile,
cooperative transmitter could move to maximise area coverage
for a give network of receivers and other transmitters.
The important point arising from this capability is that a
sensor has criteria it can use to optimise itself to be most
useful to the sensor network.
B. Transmitters
These will either be uncooperative members of other in-
frastructure (e.g. broadcast transmitters), or, transmitters con-
trolled by the cognitive system. A PCL system set up forair traffic monitoring will use fixed, terrestrial transmitters,
usually part of broadcast systems. A military, ground based
air defence system would, however, want to have a backup of
its own transmitters, as civilian resources would not be pre-
dictable or reliable. The utilisation of the transmitter resource
is potentially a difficult task.
If the illuminators and receivers are carried by unmanned
airborne vehicles (UAVs), then the positioning can be decided
autonomically, without requiring system level intervention.
C. Receivers
The receivers of the cognitive PCL system are currently
thought of as having the most autonomic functionality i.e. theywill continuously adapt themselves to the coverage require-
ments and the changing interconnectivity. They will probably
have sophisticated, multiple null steering antennas to minimise
dynamic range requirements[11].
The receiver will sense the electromagnetic (EM) environ-
ment. Potential transmitters will be assessed again the sophis-
ticated propagation modelling mentioned in Section IV-A, and
the best transmitters used. This modelling will need to have
transmitter location, and this information will come from the
higher level, or, from triangulation measurements with which
a number of receivers will need to cooperate.
The receiver will generally need to extract doppler-delay
information from the targets, and plot extraction after detec-
tion. Receivers interconnected with high quality data links may
transmit coherent data to an integration processor, higher in
the network.
D. Networks of Data Links
The interconnection of the nodes of a PCL system is
essential for enhanced performance that is likely from a
cognitive system. The autonomic sensor receivers need to
receive commands from the central intelligence, and also have
access to peer nodes for configuration data. The network
available will vary enormously in capacity and Quality o
Service (QoS), due to technology, covertness and propagation
paths available. These data links will determine the strategie
available to the autonomic receivers.
The data links themselves can be part of a Cognitiv
Radio network. Such a network would be able to utilised the
minimum amount of energy to provide robust, peer to peer
relaying of data.
E. Terrain
Terrain knowledge can be utilised at many levels. Most ob
vious is the prediction of coverage. The illumination provided
by available transmitters can be accurately predicted. Mobile
transmitters, under system control, can be deployed to provid
optimum coverage. Fortunately, good terrain maps are now
available for most of the earths surface.
As is well known, PCL receivers must be protected from
direct illumination, to reduce dynamic range requirements
Terrain models can be used to either chose the best receive
sites, or, allow a receiver to determine which transmitters touse, including the best frequency, optimised for best direc
signal suppression, and best coverage.
F. Detection
For most PCL systems, extraction of range (low resolution
and doppler (high resolution) is possible, but positioning o
targets will require further processing, as discussed in the nex
section.
It might be possible, however, if a large inter-node band
width is available, to attempt coherent radar processing before
detection. Nodes will have to share a large volume of data to
an integrator node to effect this. Then, with improved SNR
track-before-detect and other technologies can be deployed toimplement target tracking.
G. Tracking
For tracking implemented at a particular receiver site, the
simplest is doppler / delay tracking, which once initiated based
on detections, will yield three dimensional state vector. W
have demonstrated this with doppler and bearing tracking
[12]. However, input of geolocated state vectors from peers
once translated to the local coordinate system, will make the
tracking process more robust during local loss of detections.
The track state vectors can be fed upwards through th
network to assist other notes, and inform the higher level o
intelligence, which will make decisions on these. The highe
level may also prioritise areas of interest, since nodes migh
be compute limited in their signal and data processing. The
command to prioritise certain areas can also be used to bias
node level decisions as to which transmitters to utilise, once
the propagation assessment has been done.
H. High Level Functions
This probably the most difficult area of the proposed system
since it is not clear what sort of artificial intelligence wil
978-1-4244-5812-7/10/$26.00 2010 IEEE 1320
-
5/21/2018 Autonomic Subsystems for Cognition in Passive Coherent Location - slidep...
http:///reader/full/autonomic-subsystems-for-cognition-in-passive-coherent-
be needed i.e. the mechanisation, as well as the learning,
adaption and proper match to the human operator, or, higher
level intelligence.
In the human autonomic nervous system, the hypothalamus
orchestrates the interaction of the subsystems, linked to it
by the network of nerves (the autonomic nervous system).
The subsystems, as indicated above, will carry out signifi-
cant preprocessing, to reduce traffic. The implementation of
the marshalling intelligence of the hypothalamus will need
significant development, since the implementation of human
cognition is somewhat open to dispute. Some believe that
intelligence requires the running of a computer program, but
this is disputed [9] by others.
The hypothalamus in turn, links via the amygdala to the
cortex, the seat of human intelligence and high level cognition.
The myriad of low level activity is filtered extensively by this
part of the brain, and necessary coordination carried out. The
amygdala link and activate emotive (emotion driven) responses
with the cortex. They take memories of scenarious of previous
experience and the primordial responses, and produce emotive
responses to the instinctive responses of the autonomic systemorchestrated by the hypothalamus.
The higher level functions of a radar system include the
interface to the command and control system, which at present
is implemented by a combination of displays and human
operators. Even here, we see the human operators in the
command and control system in a way acting the part of
the hypothalamus, combining the inputs from a number of
different sensors (e.g. primary and secondary radar, and to
come, PCL systems).
V. CONCLUSION
This paper has given a brief overview of how a PCL system
can use a combination of autonomic operations to support ahigher level intelligence in providing a robust (reliable and
sensitive) system for aircraft target tracking.
Further work is required in terms of the autonomic network
that must adapt to provide the system with a subsystem level
of intercommunications, similar to the autonomic intercon-
nections of the human system, and the coordinating, very
programmed function of the hypothalamus.
The functionality of the receivers is quite well defined, since
the receivers are able to predict their performance, and provide
filtered information to the higher level system, depending on
link QoS and capacity. The prediction tools mentioned in this
paper are of great assistance in this process.
The biggest uncertainty i.e. the are requiring the mos
work is the high level cognition system, that will take inputs
from the autonomic subsystems, to reconfigure, learn an
provide optimum information to the user. The implementation
of human-like cognition is still a very open question, and the
subject of a great deal of research in the field of cognitiv
science.
ACKNOWLEDGMENT
The authors would like to thank the South African Nationa
Defence Force for student funding.
REFERENCES
[1] M. R. Inggs, Passive coherent location as cognitive radar, in Proceedings of the 4th Waveform Diversity and Design Conference, Februar2009.
[2] S. Haykin, Cognitive radar: a way of the future, Signal ProcessinMagazine, IEEE, vol. 23, no. 1, pp. 3040, 2006.[3] M. R. Inggs, G. E. Lange, and Y. Paichard, A quantitative method fo
mono- and multistatic radar coverage area prediction, in Proceedingof the IEEE Radar 2010 Conference, Aerospace Electronic SystemSociety. IEEE, May 2010.
[4] M. R. Inggs, Y. Paichard, and G. E. Lange, Passive coherent locatiosystem planning tool, in Proceedings of the Radar 2009 ConferenceOctober 2009.
[5] B. Kolb and I. Whishaw, An Introduction to Brain and Behaviour. 4Madison Avenue, New York 10010, USA: Worth Publishers, 2006.
[6] I. Mitola and J. Maguire, Cognitive radio: making software radios morpersonal, Personal Communications, IEEE, vol. 6, no. 4, pp. 1318August 1999.
[7] B. J. Gibb, The Rough Guide to the Brain, 1st ed. London: PenguiBooks, 2007.
[8] P. Qunilan and B. Dyson, Cognitive Psychology. Edinburgh Gate
Harlow, Essex, CM20 2JE, IK: Pearson Eduction Limited, 2008.[9] J.-P. Dupuy,On the Origins of Cognitive Science: the Mechanisation othe Mind. 55 Hayward St., Cambridge, MA 02142, USA: MIT Pres2009.
[10] G. E. Lange, Performance prediction and improvement of a bistatipassive coherent location radar, Masters thesis, University of CapTown, December 2009.
[11] K. Ebrahim, E. Tsai, G. E. Lange, Y. Paichard, and M. R. Inggs, Nuplacement in a circular antenna array for passive coherent location systems, inProceedings of the 2010 IEEE International Radar ConferenceIEEE AES. IEEE, May 2010.
[12] N. Morrison, R. T. Lord, and M. R. Inggs, The gauss-newton algorithmin passive aircraft tracking using doppler and bearings, in Proceedingof the IET International Conference on Radar Systems (RADAR 2007)Institute of Electrical and Electronic Engineers, October 2007.
978-1-4244-5812-7/10/$26.00 2010 IEEE 1321