
ATZ-Driverless Chassis Dynamo Meter Testing of Electric Vehicles
4
Key test and development parameters for electric vehicle (EV) and hybrid vehicle (HEV) applications require real life driving conditions to be simulated for a few hours. A conventional chassis dynamometer can be used to simulate all the driving conditions for a specified driving pattern. However, it is impossible for a human driver to apply the specified driving pattern for a few hours accurately. To overcome this difficulty, Tata Motors team developed a driverless chassis dynamometer test set-up which can emulate specified driving patterns to an EV/HEV powertrain for the desired amount of time. Driverless Chassis Dynamometer testing of eleCtriC vehiCles 1 2 Cover Story E E T VEH E
-
Upload
vishwas-vaidya -
Category
Documents
-
view
227 -
download
0
Transcript of ATZ-Driverless Chassis Dynamo Meter Testing of Electric Vehicles
8/4/2019 ATZ-Driverless Chassis Dynamo Meter Testing of Electric Vehicles
http://slidepdf.com/reader/full/atz-driverless-chassis-dynamo-meter-testing-of-electric-vehicles 1/4
Key test and development parameters for electric vehicle (EV) and hybrid vehicle (HEV) applications require
real life driving conditions to be simulated for a few hours. A conventional chassis dynamometer can be used
to simulate all the driving conditions for a specified driving pattern. However, it is impossible for a human driver
to apply the specified driving pattern for a few hours accurately. To overcome this difficulty, Tata Motors team
developed a driverless chassis dynamometer test set-up which can emulate specified driving patterns to an
EV/HEV powertrain for the desired amount of time.
Driverless ChassisDynamometer testing of
eleCtriC vehiCles
12
Cover Story EET VEHE
8/4/2019 ATZ-Driverless Chassis Dynamo Meter Testing of Electric Vehicles
http://slidepdf.com/reader/full/atz-driverless-chassis-dynamo-meter-testing-of-electric-vehicles 2/4
explanationS
With global warming and fuel crisis, the
interest in hybrid vehicles and electric
vehicles is at its lifetime peak. This leads
to an explosion in EV development activi
ties by OEMs who otherwise have beenfocusing on conventional powertrain vehi
cles. Key test and development parameters
for EV/HEV application comprise the
range of distance a vehicle can travel in
single charge, the torque/speed perform
ance of the powertrain, the accuracy of the
state of charge estimation etc. Although
specialised EV development and test
equipment are available, they are costly
and need special engineering skills to be
mastered for meaningfully exploiting the
potential. There are few patents awarded
[3, 4] for such systems which are again
costly and more complex. Hence every
attempt should be made to adopt existing
test equipment for development and test
activities for EV subsystems as well as
vehicle testing. [1] briefly explains this
concept applied to the chassis dynamo
meter for EV test and development activi
ties. This article further explains the con
cept with a focus on control engineering
aspects and explores manifold applications
of this simple yet powerful concept for
EV/HEV testing. First, the specific EV test ing needs are explained while the follow
ing chapter dwells on strengths and limita
tions of chassis dynamometer testing as a
test philosophy. The next section elabo
rates on the control engineering concepts
underlying the implementation of a “driv
erless philosophy”. After this the impor
tance of open loop modeling of the drive
system for implementing the control algo
rithm is highlighted. Additionally, various
EV specific tests are described which can
gainfully use this set up without requiring
huge investments in costly proprietary test
equipment which is alternatively available.
The last section provides concluding
remarks, stressing a wider application of the concept for other types of vehicles.
SpeCial teSting needS for
ev/Hev development
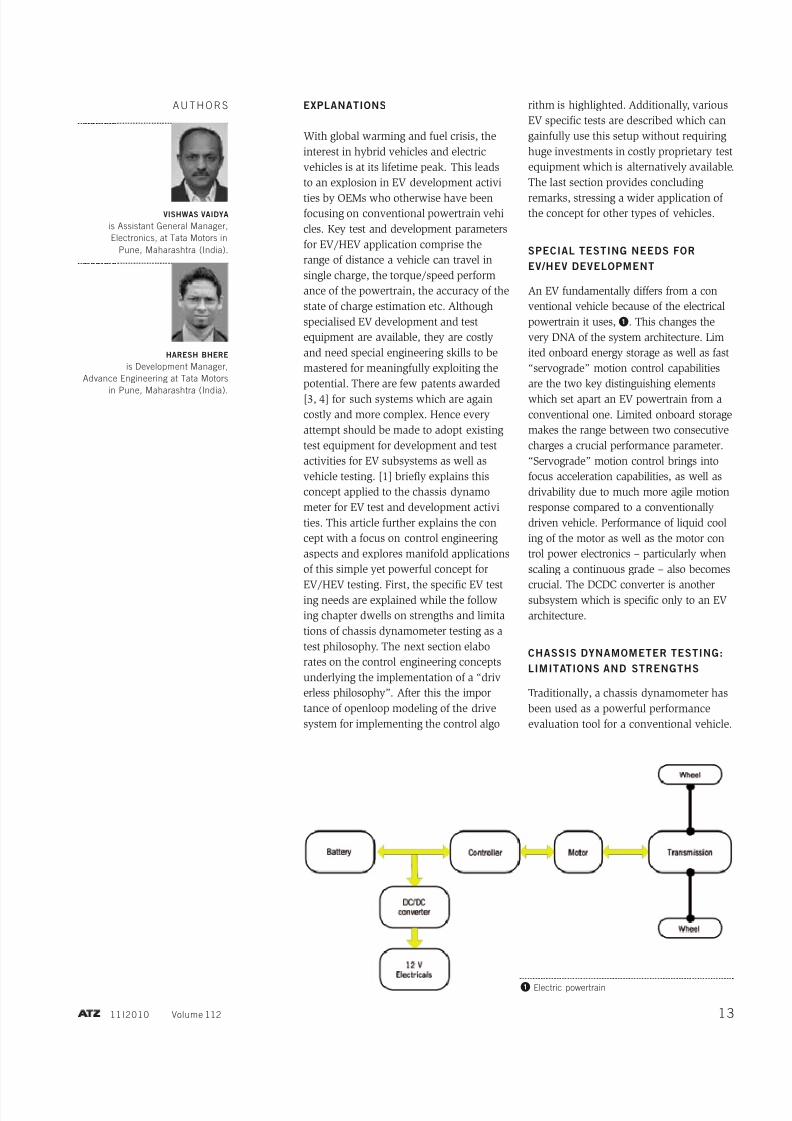
An EV fundamentally differs from a con
ventional vehicle because of the electrical
powertrain it uses,1. This changes the
very DNA of the system architecture. Lim
ited onboard energy storage as well as fast
“servo grade” motion control capabilities
are the two key distinguishing elements
which set apart an EV powertrain from a
conventional one. Limited onboard storage
makes the range between two consecutive
charges a crucial performance parameter.
“Servo grade” motion control brings into
focus acceleration capabilities, as well as
drivability due to much more agile motion
response compared to a conventionally
driven vehicle. Performance of liquid cool
ing of the motor as well as the motor con
trol power electronics – particularly when
scaling a continuous grade – also becomes
crucial. The DC DC converter is anothersubsystem which is specific only to an EV
architecture.
CHaSSiS dynamometer teSting:
limitationS and StrengtHS
Traditionally, a chassis dynamometer has
been used as a powerful performance
evaluation tool for a conventional vehicle.
viSHwaS vaidya
is Assistant General Manager,
Electronics, at Tata Motors in
Pune, Maharashtra (ndia).
HareSH BHere
is Development Manager,
Advance Engineering at Tata Motors
in Pune, Maharashtra (ndia).
ATH
1 Electric powertrain
112010 Volume 112 13
8/4/2019 ATZ-Driverless Chassis Dynamo Meter Testing of Electric Vehicles
http://slidepdf.com/reader/full/atz-driverless-chassis-dynamo-meter-testing-of-electric-vehicles 3/4
It is extensively used for assessing the
engine emission performance of a vehicle.
The driver needs to meticulously followthe driving profile displayed on a PC
screen in the form of speed versus time at
a stipulated gear position. Although this
approach is fine for a conventionally
driven vehicle which needs to be operated
for a few minutes, an EV test might go for
hours for assessing the battery perform
ance [2]. It would be next to impossible
for any human driver to meticulously fol
low a driving cycle pattern for hours. This
limitation can be addressed by using a
computerised driver simulator as
described in [1] and briefly explained inthe subsequent sections of this article.
On the other hand, the strengths of a
chassis dynamometer like electronic auto
matic load control which are used exten
sively for racing car performance evalua
tions as well as vehicle road performance
simulations under diverse driving condi
tions can be gainfully exploited to simulate
various electric current load patterns for
the EV batteries as well as for assessing
torque performance of the electrical
drivetrain components like motor and
controller.
Control engineering
perSpeCtive
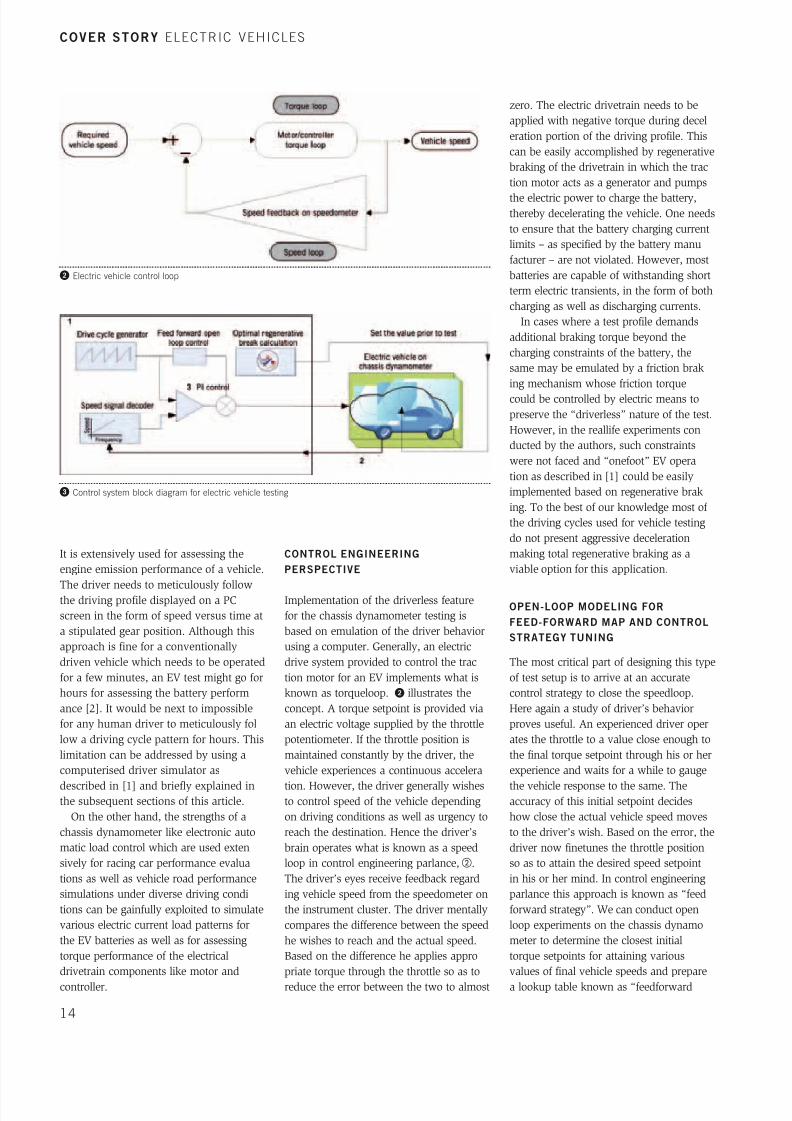
Implementation of the driverless feature
for the chassis dynamometer testing is
based on emulation of the driver behavior
using a computer. Generally, an electric
drive system provided to control the trac
tion motor for an EV implements what is
known as torque loop. 2 illustrates the
concept. A torque set point is provided via
an electric voltage supplied by the throttle
potentiometer. If the throttle position is
maintained constantly by the driver, the
vehicle experiences a continuous accelera
tion. However, the driver generally wishesto control speed of the vehicle depending
on driving conditions as well as urgency to
reach the destination. Hence the driver’s
brain operates what is known as a speed
loop in control engineering parlance,②.
The driver’s eyes receive feedback regard
ing vehicle speed from the speedometer on
the instrument cluster. The driver mentally
compares the difference between the speed
he wishes to reach and the actual speed.
Based on the difference he applies appro
priate torque through the throttle so as to
reduce the error between the two to almost
zero. The electric drivetrain needs to be
applied with negative torque during decel
eration portion of the driving profile. This
can be easily accomplished by regenerative
braking of the drivetrain in which the trac
tion motor acts as a generator and pumps
the electric power to charge the battery,thereby decelerating the vehicle. One needs
to ensure that the battery charging current
limits – as specified by the battery manu
facturer – are not violated. However, most
batteries are capable of withstanding short
term electric transients, in the form of both
charging as well as discharging currents.
In cases where a test profile demands
additional braking torque beyond the
charging constraints of the battery, the
same may be emulated by a friction brak
ing mechanism whose friction torque
could be controlled by electric means to
preserve the “driverless” nature of the test.
However, in the real life experiments con
ducted by the authors, such constraints
were not faced and “one foot” EV opera
tion as described in [1] could be easily
implemented based on regenerative brak
ing. To the best of our knowledge most of
the driving cycles used for vehicle testing
do not present aggressive deceleration
making total regenerative braking as a
viable option for this application.
open-loop modeling for
feed-forward map and Control
Strategy tuning
The most critical part of designing this type
of test set up is to arrive at an accurate
control strategy to close the speed loop.
Here again a study of driver’s behavior
proves useful. An experienced driver oper
ates the throttle to a value close enough to
the final torque set point through his or her
experience and waits for a while to gauge
the vehicle response to the same. Theaccuracy of this initial set point decides
how close the actual vehicle speed moves
to the driver’s wish. Based on the error, the
driver now fine tunes the throttle position
so as to attain the desired speed set point
in his or her mind. In control engineering
parlance this approach is known as “feed
forward strategy”. We can conduct open
loop experiments on the chassis dynamo
meter to determine the closest initial
torque set points for attaining various
values of final vehicle speeds and prepare
a look up table known as “feed forward
2 Electric vehicle control loop
3 ontrol system block diagram for electric vehicle testing
Cover Story EET VEHE
14
8/4/2019 ATZ-Driverless Chassis Dynamo Meter Testing of Electric Vehicles
http://slidepdf.com/reader/full/atz-driverless-chassis-dynamo-meter-testing-of-electric-vehicles 4/4
map”.3 shows the complete control sys
tem block diagram.
ev SpeCifiC teStS
on tHe driverleSS CHaSSiS
dynamometer
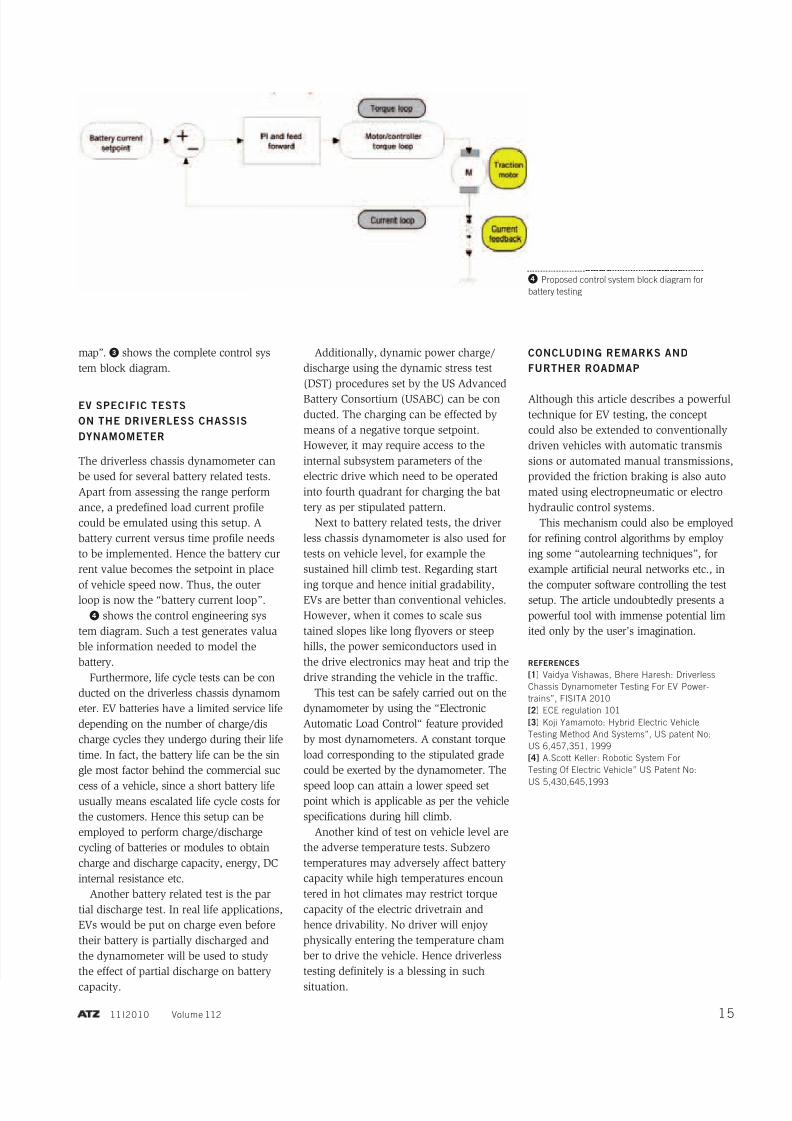
The driverless chassis dynamometer can
be used for several battery related tests.
Apart from assessing the range perform
ance, a pre defined load current profile
could be emulated using this set up. A
battery current versus time profile needs
to be implemented. Hence the battery cur
rent value becomes the set point in place
of vehicle speed now. Thus, the outerloop is now the “battery current loop”.
4 shows the control engineering sys
tem diagram. Such a test generates valua
ble information needed to model the
battery.
Furthermore, life cycle tests can be con
ducted on the driverless chassis dynamom
eter. EV batteries have a limited service life
depending on the number of charge/dis
charge cycles they undergo during their life
time. In fact, the battery life can be the sin
gle most factor behind the commercial suc
cess of a vehicle, since a short battery lifeusually means escalated life cycle costs for
the customers. Hence this set up can be
employed to perform charge/discharge
cycling of batteries or modules to obtain
charge and discharge capacity, energy, DC
internal resistance etc.
Another battery related test is the par
tial discharge test. In real life applications,
EVs would be put on charge even before
their battery is partially discharged and
the dynamometer will be used to study
the effect of partial discharge on battery
capacity.
Additionally, dynamic power charge/
discharge using the dynamic stress test
(DST) procedures set by the US Advanced
Battery Consortium (USABC) can be con
ducted. The charging can be effected by
means of a negative torque set point.
However, it may require access to the
internal sub system parameters of the
electric drive which need to be operated
into fourth quadrant for charging the bat
tery as per stipulated pattern.
Next to battery related tests, the driver
less chassis dynamometer is also used for
tests on vehicle level, for example the
sustained hill climb test. Regarding start
ing torque and hence initial gradability,EVs are better than conventional vehicles.
However, when it comes to scale sus
tained slopes like long flyovers or steep
hills, the power semiconductors used in
the drive electronics may heat and trip the
drive stranding the vehicle in the traffic.
This test can be safely carried out on the
dynamometer by using the “Electronic
Automatic Load Control“ feature provided
by most dynamometers. A constant torque
load corresponding to the stipulated grade
could be exerted by the dynamometer. The
speed loop can attain a lower speed set point which is applicable as per the vehicle
specifications during hill climb.
Another kind of test on vehicle level are
the adverse temperature tests. Sub zero
temperatures may adversely affect battery
capacity while high temperatures encoun
tered in hot climates may restrict torque
capacity of the electric drivetrain and
hence drivability. No driver will enjoy
physically entering the temperature cham
ber to drive the vehicle. Hence driverless
testing definitely is a blessing in such
situation.
ConCluding remarkS and
furtHer roadmap
Although this article describes a powerful
technique for EV testing, the concept
could also be extended to conventionally
driven vehicles with automatic transmis
sions or automated manual transmissions,
provided the friction braking is also auto
mated using electro pneumatic or electro
hydraulic control systems.
This mechanism could also be employed
for refining control algorithms by employ
ing some “auto learning techniques”, for
example artificial neural networks etc., in
the computer software controlling the testset up. The article undoubtedly presents a
powerful tool with immense potential lim
ited only by the user’s imagination.
referenCeS
[1] Vaidya Vishawas, Bhere Haresh: Driverless
hassis Dynamometer Testing For EV Power-
trains”, FTA 2010
[2] EE regulation 101
[3] Koji Yamamoto: Hybrid Electric Vehicle
Testing Method And ystems”, patent No:
6,457,351, 1999
[4] A.cott Keller: obotic ystem For
Testing f Electric Vehicle” Patent No:
5,430,645,1993
4 Proposed control system block diagram for
battery testing
112010 Volume 112 15


















