Assessment of the parameter estimation capabilities of gPROMS ...
77
Graduation report Professor: Prof. Dr. Ir. M. Steinbuch Supervisors: Prof. Dr. Ir. A.C.P.M. Backx Ir. G.M.P. Perkins Eindhoven Technical University Department Mechanical Engineering Dynamics and Control Technology Group Amsterdam, July 2005 Assessment of the parameter estimation capabilities of gPROMS and Aspen Custom Modeler, using the Sec-Butyl- Alcohol stripper kinetics case study Peter Tijl DCT 2005.96
Transcript of Assessment of the parameter estimation capabilities of gPROMS ...

Graduation report
Professor: Prof. Dr. Ir. M. Steinbuch
Supervisors: Prof. Dr. Ir. A.C.P.M. Backx
Ir. G.M.P. Perkins
Eindhoven Technical University
Department Mechanical Engineering
Dynamics and Control Technology Group
Amsterdam, July 2005
Assessment of the parameter estimation
capabilities of gPROMS and Aspen
Custom Modeler, using the Sec-Butyl-
Alcohol stripper kinetics case study
Peter Tijl
DCT 2005.96

2
Summary
In order to optimize the chemical process that occurs in the Sec-Butyl-Alcohol (SBA)
stripper operated by Shell in Pernis, the kinetic parameters of the relevant reaction
scheme are required. For this purpose laboratory experiments have previously been
performed and modelled with Aspen Custom Modeler (ACM), a commercially available
software package developed by AspenTech. The objective of this graduation project is to
build a second model of the experiments using the gPROMS software package, which is
developed by Process Systems Enterprise (PSE), subsequently perform parameter
estimation with both software tools and assess their capabilities. Both experiment models
should be as similar as possible to allow for a comparative assessment. Therefore, the
physical and thermodynamic properties of the components in ACM are made available to
the gPROMS model via the CAPE-OPEN interface, which is successfully applied. The
experiment model developed in gPROMS consists of a vapour-liquid equilibrium that
describes the distribution of nine components with reactions taking place in the liquid
phase. The model responses are found to be very similar to the existing ACM model.
During parameter estimation it became clear that not all the kinetic parameter of the
proposed reaction scheme are individually observable in combination with the available
experiment data. Therefore, the system is partially reparameterised and the parameters
are determined with sufficient accuracy. Various aspects of parameter estimation are
assessed, such as: experiment data input, output interpretation, available combinations of
objective functions and optimization solvers and their ability, speed and accuracy of
obtaining a solution. From this work it is concluded that the parameter estimation
capabilities of gPROMS are better than ACM. Additionally, it is investigated what type
of experiments are required in order to obtain parameters that remained unobservable
with the current experiment data. Attempts to apply the gPROMS Sequential Experiment
Design (SED) were unsuccessful and the added value of the SED functionality could not
be assessed. Alternatively designed experiments are simulated with a model that contains
known kinetic parameters and subsequently this synthetic experiment data is used to
estimate the parameters. The effect of data reduction on the observability of the
parameters is investigated. It proved to be possible to estimate all parameters in three
different reaction systems using a reduced set of synthesized experiment data.

3
Table of contents
SUMMARY ................................................................................ 2
TABLE OF CONTENTS.............................................................. 3
1 INTRODUCTION ................................................................. 5
2 PROJECT OBJECTIVES ....................................................... 6
3 ASSESSMENT CRITERIA .................................................... 7
3.1 MODEL BUILDING ........................................................................................................................ 8 3.2 PARAMETER ESTIMATION............................................................................................................ 8 3.3 EXPERIMENT DESIGN................................................................................................................... 9
4 CASE STUDY .....................................................................11
4.1 PROCESS DESCRIPTION ............................................................................................................ 11 4.2 LABORATORY EXPERIMENTS .................................................................................................... 12 4.3 REACTION SCHEME ................................................................................................................... 13 4.4 COMPONENTS AND INTERMEDIATES ......................................................................................... 14
5 MODEL BUILDING.............................................................16
5.1 ESSENTIAL SYSTEM EQUATIONS............................................................................................... 16 5.2 THE CAPE-OPEN INTERFACE ................................................................................................ 19 5.3 THE VAPOUR-LIQUID EQUILIBRIUM (VLE) ................................................................................ 19
5.3.1 Implementation ..................................................................................................................... 21 5.4 EXPERIMENT DATA INPUT ......................................................................................................... 23 5.5 ASSESSMENT ON MODEL BUILDING .......................................................................................... 26
6 PARAMETER ESTIMATION ................................................28
6.1 REACTION KINETICS .................................................................................................................. 28 6.1.1 Reaction kinetics reduced scheme ........................................................................................ 29 6.1.2 Reaction kinetics complete scheme....................................................................................... 34
6.2 SOLVING METHODS ................................................................................................................... 42 6.2.1 Objective functions ............................................................................................................... 42 6.2.2 Optimisation solvers ............................................................................................................. 45
6.3 PERFORMANCE ......................................................................................................................... 47 6.3.1 Ability and speed .................................................................................................................. 47 6.3.2 Accuracy ............................................................................................................................... 48 6.3.3 Effect of optimisation tolerance............................................................................................ 50
6.4 OUTPUT INTERPRETATION ........................................................................................................ 51 6.4.1 Overlay plots......................................................................................................................... 52 6.4.2 Statistical analysis ................................................................................................................ 54
6.5 ASSESSMENT ON PARAMETER ESTIMATION ............................................................................. 56
7 EXPERIMENT DESIGN.......................................................58
7.1 INTRODUCTION .......................................................................................................................... 58 7.2 APPROACH ................................................................................................................................ 59 7.3 TRIANGLE REACTION SCHEME .................................................................................................. 60 7.4 CONSTRAINTS ........................................................................................................................... 64
7.4.1 Reduced measurement data .................................................................................................. 65

4
7.4.2 Effect of measurement error ................................................................................................. 67 7.5 CONCLUSIONS ON EXPERIMENT DESIGN................................................................................... 67
8 CONCLUSIONS..................................................................69
REFERENCES ..........................................................................70
NOMENCLATURE.....................................................................72
POINTING FACTOR .....................................................................72
APPENDIX A CHEMICAL STRUCTURES OF COMPONENTS...75
APPENDIX B HAMMETT ACIDITY ..........................................76
SAMENVATTING .....................................................................77

5
1 Introduction
In the petrochemical process industry there is an increasing challenge to improve
efficiency and reduce costs due to tight margins, a maturing business and environmental
legislation. An important method to face this challenge is process modeling with the use
of so-called Computer Aided Process Engineering (CAPE) tools. These CAPE tools are
extensively used in the design, operation and optimisation of chemical processes. In order
to obtain useful models that can be applied to design optimisation, values of unknown
parameters relating to chemical kinetics must be obtained from laboratory or plant data.
The process of formulating a model and determining unknown parameters is referred to
as model development and is investigated in this project.
Multiple commercial developers of CAPE tools exist and each software package has it’s
own specific functionalities. In this project the model development and parameter
estimation capabilities of two widely used commercial software packages are assessed
and compared from a user point of view. The two packages are Aspen Custom Modeler
11.1 developed by AspenTech and gPROMS 2.3.3 developed by Process Systems
Enterprise. Both software programs have previously been reviewed by the Eurokin
consortium [8] however, with test cases that were not very challenging. The case study
applied to assess and compare the model development capabilities of both CAPE tools in
this project is a realistic and industrially relevant example. In the case study the aim is to
obtain the unknown kinetic parameters of the reactions taking place in the Sec-Butyl
Alcohol (SBA) stripper, operated by Shell. Experiments have been performed on
laboratory scale and a dynamic model of these experiments is built to fit the experiment
data.
The outline of this report is as follows: In chapter 2 the project objectives are identified.
Next, the process of model development is presented and the criteria used to asses both
software packages are defined at the various model development stages in chapter 3. In
chapter 4, the case study that is applied to investigate the model development capabilities
is described in terms of the actual process and the laboratory experiments. Chapter 5
elaborates on how the model is developed in gPROMS. The unknown parameters in this
model are estimated as described in chapter 6. Most of this work is also performed in
Aspen Custom Modeler (ACM) and at the end of chapters 5 and 6 the model
development capabilities of gPROMS are assessed and where possible compared with
ACM. In chapter 7 it is investigated what type of experiments are required to obtain the
kinetic parameters. Finally, the conclusions that are drawn from the assessment are
presented.
6
2 Project objectives
An important objective of a company in the petrochemical process industry is to optimize
chemical processes and their operation. Therefore, it is essential to have insight into the
process of interest, in particular, to understand which chemical reactions take place and
what the accessory reaction kinetics are. A method frequently used in practice to obtain
the reaction scheme and its kinetic parameters is to model the system and perform
parameter estimation with the use of CAPE software tools [4]. A number of such
commercial software packages exist; two widely used tools are gPROMS and Aspen
Custom Modeler. The main objective of this project is to:
Assess the parameter estimation capabilities of the gPROMS software and
compare them with the Aspen Custom Modeler software, using a realistic
industrial process as case study, which is the Sec-Butyl-Alcohol stripper.
At the start of this project, laboratory experiment data and an experiment model in the
ACM software with the necessary physical properties of the components were available.
Furthermore, a reaction scheme was proposed that was assumed to describe the reactions
taking place both in the actual stripper process and in the laboratory experiments. The
main objective is divided into three underlying objectives, followed by a brief
explanation:
1. Develop an experiment model in gPROMS similar to the existing model in ACM,
applying the CAPE-OPEN interface to ensure identical physical properties.
In order to compare the model development capabilities of both software packages, it is
essential to use two identical experiment models with identical physical properties. The
exchange of physical properties between the two software packages should be possible
via the so-called CAPE-OPEN interface.
2. Perform parameter estimation to obtain a unique reaction scheme and its kinetic
parameters with both software packages and compare their performance and
usability.
A unique reaction scheme implies that a model response is the result of a unique set of
model parameters only. The criteria used to assess and compare the performance and
usability of both software packages are introduced in the next chapter.
3. Investigate what type of experiments is required to obtain the parameters
preferably by applying the gPROMS Sequential Experiment Design functionality
The gPROMS software has an extra functionality compared to the ACM software, which
is Sequential Experiment Design (SED) [20]. This would enable the user to sequentially
design future experiments such that the experiment data, used to improve the accuracy of
previously estimated parameters, has maximal information content. Then the response of
the system is such that the parameters become more observable.

7
3 Assessment criteria
In this chapter the criteria used to assess and compare the model development capabilities
of both software packages are introduced by walking through the process of model
development as schematically presented in Figure 3.1. Each step involving the use of a
CAPE tool is briefly discussed and the criteria relevant for that step are defined.
Figure 3.1 Schematic representation of model development.
Start
Model
kin data
phys.
Parameter
Estimation
Good fit?
Parameter
accuracy ok?
One clearly best
candidate model?
Finished
Alternative
kinetic scheme
Perform
experiment
Experiment
Design
parameter
precision
model
discrimination
yes
no
no
yes
yes
no
no
8
3.1 Model building
Assuming an experiment is already performed, the first stage in the model development
process is the building of a model that describes the performed experiments. In this
context, a model is referred to as a mathematical system of equations and variables that
describes the behaviour of a physical system. Typical items present in a model that
describes chemical experiments carried out to obtain a unique reaction scheme and its
kinetic parameters are: equations of conservation of mass and individual components
according to a reaction scheme with kinetic parameters, physical properties of the
components and the experiment data required to perform parameter estimation. The
criteria used to evaluate both packages in the model building section are related to the
latter two typical items of an experiment model:
• CAPE-OPEN compliancy; can the physical properties available in the ACM
environment be applied in the gPROMS software via the CAPE-OPEN interface?
• Interaction with MS Excel for experiment data input.
Other aspects such as programming effort and syntax are not taken into account since
they are very similar. Furthermore, the user is expected to have basic knowledge and
skills in model building, which is required for applying both software tools.
3.2 Parameter estimation
When the experiments are performed and a model of these experiments is built, the next
stage in the model development process is the estimation of unknown model parameters.
The software tools apply a mathematical routine that optimizes the fit of the model
response to measured values from the experiment data by varying certain model
parameters. The criterion for what is an optimal fit is defined by a so-called objective
function. The mathematical routine used to minimize the objective function by moving
the model parameters from an initial guess to their optimal values is referred to as the
optimisation solver. The first criterion used to evaluate both packages in the parameter
estimation section is:
• Ability and speed of obtaining optimal values for kinetic parameters
If the parameter estimation routine has found an optimal solution of the model
parameters, critical questions need to be asked that can hopefully be answered by correct
interpretation of the output provided by the software package. Correct interpretation of
the parameter estimation output depends on the skills and knowledge of the user, but also
on the amount, type and presentation of the statistical output provided by the software
package.
Good fit? The first aspect of the parameter estimation solution that has to be
investigated is the goodness of fit. This can be done by making an overlay plot of the

9
measured and predicted values of the experiment values. When the predicted values do
not match the measured values at all, this indicates that the model cannot describe the
actual process. Assuming other model aspects are correct, the proposed solution is to
generate an alternative kinetic scheme that does represent the reaction mechanism taking
place in the chemical process. The criterion to evaluate both software tools in the output
interpretation stage with regard to this first critical question is:
• Accessibility and functionalities of overlay plots.
Parameter accuracy ok? If the goodness of fit is satisfactory, the second aspect in
interpreting the parameter estimation output is the parameter accuracy. The accuracy is
usually presented in terms of the standard deviation of an estimated parameter and a
confidence interval with a percentage of certainty that the actual parameter value is
within that interval. The reason for possible unsatisfactory parameter accuracy is that the
experiment data does not contain sufficient information to accurately determine the
model parameters. There are two approaches to tackle this problem; the first one is to
design one or more new experiments that, in combination with the already available
measurement data, do contain sufficient information. This approach is discussed in more
detail in the next stage of model development, experiment design. Secondly, the model
can be re-parameterised, reducing the number of parameters to be estimated. Assuming
other model aspects are correct this can result in a reduced kinetic scheme with less or
other reactions then the initial scheme. However, it can also be the case that some
parameters cannot be determined individually because they become clustered in the rate
equations, this then becomes apparent by high cross-correlations of the parameters
involved. The group of clustered parameters can be replaced by a single parameter that
can probably be determined with sufficient accuracy. Alternatively, all but one of the
parameters that are clustered can be set to a fixed value. All these forms of re-
parameterisation reduce the number of parameters to be estimated. To indicate the reason
for unsatisfactory parameter accuracy and deciding which parameters are redundant
requires detailed knowledge of the reaction system and is usually not straightforward.
The criteria used to assess and compare both software packages in the output
interpretation stage regarding parameter accuracy are:
• Level of accuracy achieved compared to estimated value of parameter.
• Available statistical information.
3.3 Experiment design
When the parameter accuracy is unsatisfactory or when it is not clear which of multiple
candidate models is superior, one or more new experiments need to be performed. Since
performing experiments is usually costly and time consuming, it is required they are
designed as efficiently as possible. Here, efficiently means that the experiment data
contains maximal information to either improve the parameter accuracy or distinguish

10
between candidate models. The criteria used to assess and compare both software
packages in the experiment design stage of the model development process are:
• Availability and functionality of experiment design for parameter precision.
• Added value of the experiment design feature.
The last criterion is difficult to assess without walking through the following steps:
perform an experiment designed by the software packages and an experiment designed
intuitively, make an iteration by performing parameter estimation with the extra data
from both experiments and finally evaluating whether the parameter accuracy or model
discrimination is significantly better in the case of the experiments designed by the
software package based on statistical methods. It was however not possible to perform
new experiments in the scope of this project, therefore other methods need to be found to
evaluate the added value of experiment design by CAPE tools. This is discussed in more
detail in chapter 7.

11
4 Case study
The case study investigated to compare the model development capabilities of the two
software packages gPROMS and ACM, is a realistic industrial case. It involves the
stripper section of the production process of Secondary-Butyl Alcohol (SBA). In order to
obtain the reaction scheme and the intrinsic kinetics parameters of the reactions taking
place in the SBA stripper section, batch experiments have been performed in a laboratory
and a model that describes these experiments has been developed and validated with the
available experiment data. In the model development process, the kinetic parameters are
determined using the parameter estimation functionalities in both commercial modeling
software tools gPROMS and ACM.
In this chapter, first a short description of the actual production process of SBA is
presented, followed by a description of the conducted laboratory experiments used in this
case study. Next, the kinetic scheme of the reactions expected to take place during both
the actual process and the experiments is discussed and finally an overview is given of
the components involved in these reactions.
4.1 Process description
The COF/2 unit at Pernis produces SBA, precursor to Methyl Ethyl Ketone (MEK), by
hydration of Butene (C4) in the presence of sulphuric acid (H2SO4). In the reaction
section liquid C4 is reacted with 72% sulphuric acid at 40 to 55 ºC, thereby forming so-
called fat acid containing SBA in free form and as Mono-Butyl Sulphate (MBS). This acid
is hydrolysed by the addition of water in the hydrolysis section, after which it is fed into
the stripper section. Low-pressure steam as a stripper medium enters the stripping
columns from the bottom. SBA and other light components, such as various butenes, are
drawn off at the top vapour outlet and diluted sulphuric acid or spent acid is drawn off at
the bottom liquid outlet. All light components drawn off are fed into the next section,
where caustic is used to neutralize any residual acid. Spent acid is sent to the Mantius,
where it is re-concentrated to approximately 72% acid strength, after which it can be re-
used in the reaction section [7].
The focus in this project is on the stripper section. The SBA stripper is a reactive
distillation column in which, as the products are being removed by distillation, the MBS
to SBA hydrolysis equilibrium is shifted towards the alcohol. Not only does the desired
hydrolysis reaction take place in the stripper, but also the undesirable reversion of MBS
and SBA to butanes. Roughly 25 to 30% of the potential alcohol is turned into reversion
gas that must be recycled to the reactors.
The objective in the case study is to obtain the reaction scheme and its kinetic parameters,
which will be used in a later stage to improve understanding in how to manipulate the
stripper operating variables such that the formation of reversion gas is minimized.

12
4.2 Laboratory experiments
The laboratory batch experiments were carried out using a “Hastelloy-C bolted-head”
autoclave with a total blocked-in volume, which includes the liquid phase and the vapour
cap, of 1033.2 cc. A “Welker Cylinder” with a capacity of 500 cc was used as a feed
charging system for the transfer of butane/butene liquid feed into the autoclave. Samples
taken from the liquid phase in the autoclave were collected in stainless steel sample
bombs, using an automated sampling system, and were diluted with cyclohexane and
water [16]. A schematic representation of the experiment set-up is presented in Figure
4.1.
Figure 4.1 Schematic representation of experiment set-up.
Two types of experiments were carried out to determine the reaction kinetics. The first
type involves the (desired) hydrolysis of MBS via an intermediate to SBA. The second
type of experiments is the reverse of the first type, it is the (undesired) sulfation of SBA
via an intermediate to MBS. Both temperature and pressure are maintained constant
during individual experiments. In order to raise the temperature, a heating jacket was
used and the reactor was pressurized by adding nitrogen (N2) gas, which is inert.
In order for the experiment data to obtain information on the reaction activation energies,
it is required to have experiment data at multiple temperatures. Therefore, both the
hydrolysis and the sulfation experiments are performed at three temperatures: 60, 75 and
90 °C with various initial compositions. Unfortunately, the experiments could not be
performed at the actual process temperature of about 115 °C. At this temperature, the
reactions occur too fast for the equipment to take multiple samples during the transient
behaviour of the reactions. Capturing the transient behaviour is essential to determine the
kinetic parameters that describe the reaction dynamics.

13
A total of 19 experiments have been performed, named “exp097” increasing in number
up to “exp115”. They are distinguished into two different types and three different
temperatures, as presented in Table 4.1. Five samples from the liquid phase are taken
during each experiment and the composition in terms of weight percentage of seven
components is measured, resulting in 665 data points. The weight percentage of the eight’
component (water) is determined indirectly, satisfying the constraint that the weight of all
eight components together is 100% of the total weight.
Table 4.1 Overview of experiments used in case study.
Sulfation Hydrolysis
exp097 exp104
exp099 exp105
exp112 exp106 T = 60 °C
exp115
exp098 exp107
exp100 exp108
exp101 exp109
exp113
T = 75 °C
exp114
exp102 exp110 T = 90 °C
exp103 exp111
Additional experiments have been performed to investigate the vapour-liquid phase
distribution, in this case study only the experiments in Table 4.1 are made use of. Details
of the experiment procedures and the data obtained from the experiments in Table 4.1
and the additional vapour-liquid phase distribution experiments can be found in [16].
4.3 Reaction scheme
Multiple reaction schemes have been proposed to describe the reaction kinetics in both
the batch experiments and the actual stripper process. The reaction scheme applied for the
reaction section in previous work was adopted to describe the reactions in the stripper
section [16]. However, during model development it became clear that the kinetic
parameters of the initially proposed reaction scheme could not be obtained in
combination with the available measurement data. The original reaction scheme is
simplified by removing one reversible reaction in order to obtain a unique fit with the
available measurement data. In Chapter 7 it is investigated what type of experiments
would provide the data that is required to estimate the parameters of this reaction. The
reaction scheme used in this case study to compare both software tools is schematically
displayed in Figure 4.2.

14
C4⊕ SBE
SBA
H⊕H⊕
H⊕
H⊕
1-C4= T2-C4
= C2-C4=
SBAMBS
H2SO4 H2O
H⊕
H⊕
C4⊕ SBE
SBA
H⊕H⊕
H⊕
H⊕
1-C4= T2-C4
= C2-C4=
SBAMBS
H2SO4 H2O
H⊕
H⊕
Figure 4.2 Schematic representation of reaction scheme
All the reactions that occur in the reaction scheme as presented in Figure 4.3 are
reversible and take place in the liquid phase. The reaction rate constants ki are presented
in brackets where the first of the two reaction rate constants belongs to the forward
reaction rate.
1-C4 + H+ C4
+ (k1 and k2)
c2-C4 + H+ C4+ (k3 and k4)
t2-C4 + H+ C4+ (k5 and k6)
C4+ + H2SO4 MBS + H+ (k7 and k8)
C4+ + H2O SBA + H+ (k9 and k10)
C4+ + SBA SBE + H+ (k11 and k12)
Figure 4.3 Reaction scheme.
A description of the components and intermediates that occur in the reaction scheme is
presented in the following paragraph.
4.4 Components and intermediates
In Table 4.2 an overview is provided of the components and intermediates C4+ and H
+
that are present in the reaction scheme. During the experiments the tank is pressurized
with the inert nitrogen gas, therefore this component is included in the overview as well.

15
Table 4.2 Overview of components and intermediates.
Abbreviation Full name Chemical formula
H2O Water H2O
H2SO4 Sulphuric acid H2SO4
SBA Sec-Butyl Alcohol C4H10O
MBS Mono-Sec-Butyl Sulfate C4H10O4S
SBE Sec-Butyl Ether C8H18O
C4+
Protonated Butene C4H9
1-C4 1-Butene C4H8
c2-C4 Cis-2-Butene C4H8
t2-C4 Trans-2-Butene C4H8
H +
Proton H
N2 Nitrogen N2
The chemical structures of the components in Table 4.2 are displayed in Appendix A.

16
5 Model building
The first stage in the model development process is model building. A model is defined
as a system of equations that describes the behaviour of a physical system in terms of
inputs, states and outputs. Before constructing a model it should be clear what it’s
purpose and requirements are. In this case, the purpose of the model is to determine the
unknown kinetic parameters of the reaction scheme that describes the SBA stripper
process. Therefore, batch experiments have been performed and the experiment model
will be validated using the experiment data, thereby determining optimal estimates of the
values for the intrinsic kinetic parameters.
The batch experiment model is required to describe the vapour-liquid equilibrium (VLE)
that exists in the CSTR and the reactions that take place in the liquid phase. Such an
experiment model has previously been built in ACM and a new, identical model needs to
be developed in gPROMS. Some challenging aspects in modelling the batch experiments
are the use of the CAPE-OPEN interface to describe the VLE and the fact that the amount
of nitrogen is a free variable that is determined by satisfying the constraint that the
pressure is fixed in every experiment. The VLE determines the component distribution
over a vapour and a liquid phase, which is commonly referred to as a flash calculation. In
this chapter, first the essential system of equations is described that is required to solve a
tank reactor model consisting of a vapour-liquid equilibrium, N components and R
reactions, making use of a CAPE-OPEN interface. Next, the implementation and use of
the CAPE-OPEN interface is described. Finally, the underlying theory of vapour-liquid
equilibria is addressed followed by a consideration on how the VLE is best implemented
in the gPROMS model in order to result in a component distribution over both phases
similar to what the existing ACM model predicts.
5.1 Essential system equations
The system of equations presented in this paragraph is the minimal set of equations
required to solve a tank reactor model consisting of a vapour-liquid equilibrium, N
components and R reactions, making use of a CAPE-OPEN interface. In order to be able
to perform a Degree Of Freedom (DOF) analysis, the variables introduced in Table 5.1
are assigned a certain status (Known, Unknown: Algebraic, Unknown: Differential or
Initial) according to the terminology used in gPROMS. In this system, the number of
moles of the Nth component (N2) has status Unknown: Algebraic and is a free variable.
Otherwise the system would be overspecified, since the temperature, the pressure and the
total volume of the tank all have status Known and are thus fixed. The reader is referred
to the nomenclature for a description of the symbols.

17
Table 5.1 Status of essential model variables according to gPROMS terminology.
Indices Variable status Symbol
component reaction
Known T ,P , TV , Li ,φ , Vi ,φ , Ln,υ , Vn,υ , ji ,υ , jia , , jA , jEa , gR Ni ,...,1= Rj ,...,1=
Unknown: Algebraic Tn , Nn , ix , iy , Lin , , Vin , , Ln , Vn , LV , VV , LiC , , jk Ni ,...,1= Rj ,...,1=
Unknown: Differential t
ni
∂
∂ 1,...,1 −= Ni
Initial in 1,...,1 −= Ni
Equations (5.1) up to and including (5.16) represent the core of the experiment model
developed in gPROMS. As follows from the DOF analysis in Table 5.2 they form a
consistent set, which is a necessary requirement since all model equations are solved
simultaneously and most equations are implicitly solved. The conservation of the number
of moles is given by
∑=
=N
i
iT nn1
(5.1)
∑=
=N
i
LiL nn1
, (5.2)
∑=
=N
i
ViV nn1
, (5.3)
The liquid and vapour mole fractions are required to satisfy equations (5.4) up to and
including (5.11).
L
Li
in
nx
,= 1,...,1 −= Ni (5.4)
V
Vi
in
ny
,= 1,...,1 −= Ni (5.5)
11
=∑=
N
i
ix (5.6)
11
=∑=
N
i
iy (5.7)

18
ViLii nynxn ⋅+⋅= Ni ,...,1= (5.8)
The liquid and vapour mole fractions also appear as input variables for the CAPE-OPEN
interface, as is the case in equations (5.9) up to and including (5.11). The vapour-liquid
equilibrium is described by (5.9), as will be discussed in detail in paragraph 5.3.
( ) ( )iViiiLii yPTyxPTx ,,,, ,, φφ ⋅=⋅ Ni ,...,1= (5.9)
The liquid volume, the vapour volume and the total volume satisfy equations (5.10),
(5.11) and (5.12) respectively
( )iLnLL xPTnV ,,,υ⋅= Ni ,...,1= (5.10)
( )iVnVV yPTnV ,,,υ⋅= Ni ,...,1= (5.11)
VLT VVV += (5.12)
Equations (5.13) up to and including (5.16) are required to describe the change of the
number of moles in the liquid phase due to chemical reactions.
∑=
⋅⋅=∂
∂ R
j
jjiL
i rVt
n
1
,υ 1,...,1 −= Ni (5.13)
jiaN
i
Lijj Ckr,
1
,∏=
⋅= Rj ,...,1= (5.14)
TR
Ea
jj
j
eAk ⋅
−
⋅= Rj ,...,1= (5.15)
LiLLi CVn ,, ⋅= Ni ,...,1= (5.16)
In Table 5.2 a DOF analysis of equations (5.1) up to and including (5.16) is presented.
Table 5.2 DOF analysis.
Unknown: Algebraic 5N + 2R + 6
Differential N - 1 +
Total 6N + 2R + 5
Initial N - 1
Equations 6N + 2R + 5

19
As can be seen from the DOF analysis in Table 5.2, the total number of Unknown
variables is equal to the number of Equations. Furthermore, the number of Initial
variables equals the number of Differential variables. These two requirements have to be
met in order to have a well-posed system.
5.2 The CAPE-OPEN interface
The CAPE-OPEN (CO) thermodynamic and physical properties interface is applied in
order to guarantee that both the ACM and the gPROMS model make use of identical
thermodynamic methods and physical properties. This interface allows software
components that provide thermodynamic and physical properties calculations to be used
in a CAPE-OPEN compliant Simulation Environment (COSE). The essential
thermodynamic and physical properties data used in CAPE tools is also referred to as
basic data.
The basic data for the SBA process is exported from AspenPlus as a CO file with the
extension *.cota. While exporting, information is written in the MS Windows Registry
containing name, location and ProgId of the so-called Property Package (PP). A Property
Package is a complete, consistent, reusable and ready-to-use collection of methods,
chemical compounds and model parameters for calculating any of a set of known
properties for the phases of a material. It includes all the pure compound methods and
data, together with the relevant mixing rules and interaction parameters [19]. A collection
of PP’s is called a Property System (PS). In order to access the AspenTech PP in
gPROMS, it has to be introduced as a Foreign Object (FO). It then behaves as a sub-
model that makes use of methods (pre-defined functions) that usually require a certain
input (e.g. temperature, pressure, mole fraction) and return the value of the property
corresponding to the method.
The methods used in the gPROMS experiment model are: MolecularWeight,
LiquidFugacityCoefficient, VapourFugacityCoefficient, LiquidVolume and
VapourVolume. Not all existing methods are available in the CO PP that is generated by
AspenPlus. For instance, the method Kvalues that is commonly used to perform a flash
calculation and determine the Vapour-Liquid Equilibrium cannot be accessed. However,
as will follow in the next paragraph, there are many ways to describe the Vapour-Liquid
Equilibrium.
5.3 The vapour-liquid equilibrium (VLE)
For a mixture consisting N components, the liquid and vapour phase are in equilibrium if
the chemical potential of component i in the liquid phase is equal to the chemical
potential of component i in the vapour phase. Furthermore, it must hold that the
temperature and the pressure of both phases are equal [15]. Instead of the chemical
potential, another quantity is introduced named fugacity, for it is more directly related to

20
pressure and therefore often preferred in engineering calculations [15]. The fugacity is
related to the chemical potential by its definition
( ) ( ) ( )( )0,00
00,00
0
,,
,,ln,,,,
ii
ii
iiiixTPf
xTPfRTxTPxTP += µµ (5.17)
From which it follows that for a mixture to be in phase equilibrium, the fugacity of
component i in the liquid phase must be equal to the fugacity of component i in the
vapour phase, this is referred to as the isofugacity condition. Summarizing, a mixture
consisting of a liquid and a vapour phase is in phase equilibrium if the following
conditions are met:
( ) ( )iViiLi yTPfxTPf ,,,, ,, = (5.18)
VL TTT == (5.19)
VL PPP == (5.20)
Next, the fugacity coefficient is introduced for both the liquid and vapour phase defined
by respectively
Pxf iLiLi ⋅⋅= ,, φ ; Pyf iViVi ⋅⋅= ,, φ (5.21)
Combining (5.18) and (5.21) results in
iViiLi yx ⋅=⋅ ,, φφ (5.22)
The fugacity coefficients take account for the non-ideal behaviour of the phases. For an
ideal gas it holds that the vapour fugacity coefficient is one and that the vapour fugacity
of component i is equal to its partial pressure.
1, =Viφ ; iiVi PPyf ≡⋅=, (5.23)
The liquid fugacity is usually expressed in terms of an activity coefficient. This approach
makes the system suited for describing the interaction between multiple liquid phases that
occurs in liquid-liquid and vapour-liquid-liquid systems. The activity coefficient is
derived from the quantity activity, which is defined as the ratio of the actual fugacity and
a reference fugacity of the pure liquid at saturation pressure. The definitions for
respectively activity and activity coefficient are
( )( )0,0
0 ,,
,,
ii
ii
ixTPf
xTPfa ≡ (5.24)

21
i
i
ix
a≡γ (5.25)
Combining (5.24) and (5.25) results in the following expression for the liquid fugacity
0
,, LiiiLi fxf ⋅⋅= γ (5.26)
Furthermore it holds that
ifLi
sat
iLi Pf ,
0
,
0
, Ρ⋅⋅= φ (5.27)
Combining (5.26) and (5.27) results in
ifLi
sat
iiiLi Pxf ,
0
,, Ρ⋅⋅⋅⋅= φγ (5.28)
We now have two different types of expressions for the liquid and the vapour fugacity,
which still need to satisfy the isofugacity condition in (5.18). Therefore, combining and
reorganising (5.18), (5.21) and (5.28) results in a more explicit form of the vapour-liquid
equilibrium equation
ifLiii
sat
iVii xPyP ,
0
,, Ρ⋅⋅⋅⋅=⋅⋅ φγφ (5.29)
This equation is generally valid at pressure conditions below 10 bar and it is the basis
from which approximations can be derived, such as Raoult’s law. Another feature of
equation (5.29) is that it reveals which types of Basic Data are used.
5.3.1 Implementation
The existing ACM model makes use of the Non-Random Two Liquid (NRTL) model that
computes the activity coefficient of the various components. This model is based on the
idea that on microscopic scale the local composition in a mixture deviates from the
overall composition due to intermolecular interaction. An important aspect of the NRTL
model is that it assumes the gas phase is ideal, resulting in a vapour fugacity coefficient
of one for all present components. Furthermore, the Poynting factor if ,Ρ , which is a
pressure correction factor, is also one for all present components. Thus when applying the
NRTL model, the vapour-liquid equilibrium equation (5.29) is reduced to
0
,Liii
sat
ii xPyP φγ ⋅⋅⋅=⋅ (5.30)
The most logical approach would be to implement equation (5.30) in the gPROMS model
as well. Therefore, all the variables apart from the mole fractions in both phases xi and yi
need to be known, since the relation between these fractions for all components is
22
required. The total pressure is known from the experiments and the liquid activity
coefficient together with the liquid fugacity coefficient at reference pressure are available
in the CO package exported from AspenPlus. The saturation pressure can also be
exported from AspenPlus in the CO package, it is however not available. In the ACM
model, the saturation pressure or vapour pressure of a pure component i is calculated as a
function of temperature and a set of seven coefficients, using the extended Antoine
equation. This correlation is also applied in the gPROMS model together with equation
(5.30) to describe the VLE. In order to test that the ACM and the gPROMS model give
similar results, flash calculations without any reactions have been performed. The results
of the vapour-liquid distribution are compared in terms of the liquid and vapour mole
fractions of all components. The relative deviation of the liquid mole fraction of each
component is determined between the ACM and the gPROMS results using
%100, ⋅−
=ACM
i
gPROMS
i
ACM
iiL
x
xxDeviation (5.31)
The relative deviations of the vapour mole fractions are defined equivalently. The results
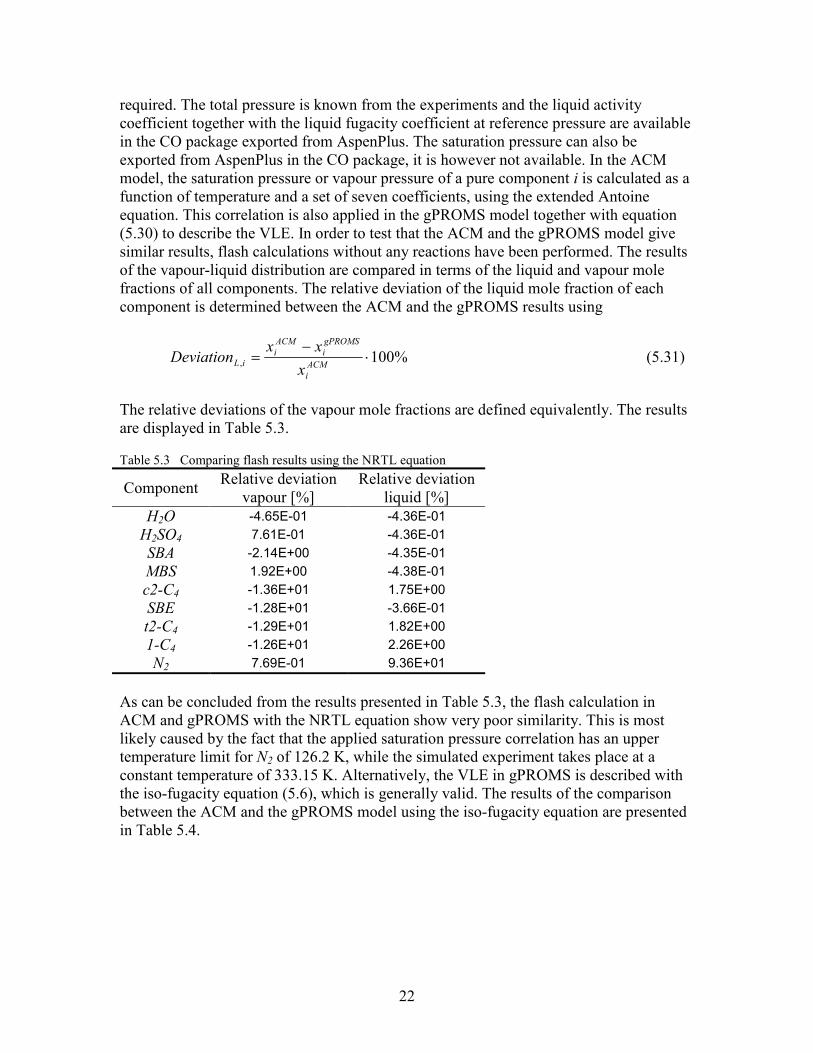
are displayed in Table 5.3.
Table 5.3 Comparing flash results using the NRTL equation
Component Relative deviation
vapour [%]
Relative deviation
liquid [%]
H2O -4.65E-01 -4.36E-01
H2SO4 7.61E-01 -4.36E-01
SBA -2.14E+00 -4.35E-01
MBS 1.92E+00 -4.38E-01
c2-C4 -1.36E+01 1.75E+00
SBE -1.28E+01 -3.66E-01
t2-C4 -1.29E+01 1.82E+00
1-C4 -1.26E+01 2.26E+00
N2 7.69E-01 9.36E+01
As can be concluded from the results presented in Table 5.3, the flash calculation in
ACM and gPROMS with the NRTL equation show very poor similarity. This is most
likely caused by the fact that the applied saturation pressure correlation has an upper
temperature limit for N2 of 126.2 K, while the simulated experiment takes place at a
constant temperature of 333.15 K. Alternatively, the VLE in gPROMS is described with
the iso-fugacity equation (5.6), which is generally valid. The results of the comparison
between the ACM and the gPROMS model using the iso-fugacity equation are presented
in Table 5.4.

23
Table 5.4 Comparing flash results using the iso-fugacity equation
Component Relative deviation
vapour [%]
Relative deviation
liquid [%]
H2O -8.54E-04 -6.93E-05
H2SO4 -3.20E-04 1.31E-04
SBA 4.03E-04 8.28E-05
MBS < 1E-08 -1.57E-03
c2-C4 -6.61E-04 -1.33E-03
SBE -5.68E-03 -3.35E-03
t2-C4 < 1E-08 8.61E-04
1-C4 < 1E-08 -3.36E-03
N2 -5.12E-05 < 1E-08
The flash calculation output of the ACM model and the gPROMS model using the iso-
fugacity equation is very similar, as can be seen in Table 5.4. The deviations are
considered to be small enough in order to assume that the flash calculation in both
models is identical. Summarizing, the vapour-liquid equilibrium is successfully modelled
in gPROMS using the iso-fugacity equation (5.22), where the fugacity coefficients are
provided through the CAPE-OPEN interface. The developed gPROMS experiment model
and the existing ACM experiment model are considered to be similar enough to perform
a comparative assessment with.
5.4 Experiment data input
In this paragraph the input of experiment data in both gPROMS and ACM is described.
This aspect is considered to be important, since large data sets are frequently encountered
and minor differences in the data input sequence can result in a large difference in
required time and effort.
ACM
Experiment data input in ACM is found under Tools, Estimation. This opens a window
with five tabs, one of which is named Dynamic Experiments. Behind this tab, the user can
introduce an experiment with a weighting factor. Furthermore there is a tick box that
indicates if the experiment is active, which means whether it is taken into account when
performing a parameter estimation run. Experiments can be copied as a whole within this
window, however not to another model. It is not possible to have more than one model
opened in an ACM session in general, but even when two sessions are opened it is not
possible to copy an experiment from one model to the other.
When an experiment is added, it can be edited by clicking Edit. This opens a window
with three tabs, being Measured Variables, Fixed Variables and Initial Variables. Behind
the latter tab, the user specifies the names and values of the variables that are indicated as
initial in the model. It is not possible to copy more than one value, from for instance MS
Excel, into this window. Behind the Fixed Variables tab, the user can specify variables

24
and corresponding values that maintain constant during an experiment, but can vary
between experiments. It is possible to specify time dependant values by selecting a Fixed
Variable and clicking Edit. This enables the user to assign certain values at certain points
in time for the Fixed Variable, with a linear change in time between the various points.
This is indicated with the word ramped where otherwise the value of the Fixed Variable
would appear, as can be seen in Figure 5.1.
Figure 5.1 Screenshot of ACM experiment data input for Fixed Variables.
Behind the Measured Variables tab the user can introduce the variable names followed
by clicking Edit, which opens a window where the actual measurement data input for a
specific experiment and a specific measured variable is required. A table appears from
which three columns can be edited: Time, Weight, and Observed Value. The measurement
weight is optional and can be specified for each individual measurement point. The other
columns (Predicted Value, Absolute Residual, % Residual and Standardized Residual)
are reserved for the results of a parameter estimation run and contain N/A when results
are not available. It is possible to paste two columns with values for the measurement
time and the corresponding observed value for each variable in each experiment.
However, it is not possible to paste measurement data for all measured variables of an
experiment at once, since the data for each measured variable is behind a separate
window.
gPROMS
A so-called project in gPROMS consists of multiple entities such as in this case the
variable types, a model entity with the system equations, a process entity to perform
simulation, an estimation entity and also experiment entities. The measured experiment
data is to be imported in these experiment entities. There is a distinction between
experiment entities for parameter estimation and for experiment design, in this paragraph
the setup of an experiment entity for parameter estimation is described.

25
One of aspects in which gPROMS differs from ACM is its accessibility and open code. A
good example is the experiment entity, which can be accessed and edited both through a
Graphical User Interface (GUI) and by using the gPROMS language. Both are different
representations of one item, therefore an action performed via the GUI is immediately
visible in the language and vise versa. Similar to ACM, the experiment entity contains
three tabs to specify initial conditions, constant or fixed variables and the measured data
itself. These three tabs are accessible via the GUI and the fourth tab contains the
gPROMS language representation of the first three tabs and thereby the entire experiment
entity. The fifth tab named properties contains general file information about the
experiment entity.
In the first tab named initial conditions, the user specifies the names and initial values of
the variables that have a time derivative in the model. In the second tab named controls,
the variable names and values of so-called time-invariant or piecewise constant controls
can be specified. The piecewise constant option enables the user to define a discontinuous
change of a variable with a zero order hold, opposed to a ramped change (first order hold
behaviour) in ACM. In the third tab named measured data, all measured variables and
their values at various points in time during one experiment can be defined in one table.
The complete table with values for all variables can be pasted from a spreadsheet in e.g.
MS Excel. There is an option to transpose the table in gPROMS, which can be useful
depending on how the raw experiment data is available. A measured variable and its data
can be ignored by commenting it out in the gPROMS language representation of the
experiment entity, which is behind the fourth tab. In the estimation entity the user
specifies which experiments to use for parameter estimation and it is straightforward to
exclude complete experiments here. Part of two experiment entities of experiments 97
and 98 is displayed in Figure 5.2. The measured data for experiment 97 is represented
through the GUI, for experiment 98 it is represented in the gPROMS language. The
project tree with its various previously discussed entities can be seen on the left.
Figure 5.2 Screenshot of gPROMS experiment data input entities for experiments 97 and 98.
26
5.5 Assessment on model building
A model of the laboratory batch experiments performed in a CSTR was available in
ACM and an equivalent model has been built in gPROMS. In these batch experiments
some components were significantly present in two phases and therefore a vapour-liquid
equilibrium is taken into account in both models. Part of a gPROMS library model is
used to incorporate this vapour-liquid equilibrium. The required thermodynamic and
physical properties of the components are made available through the CAPE-OPEN
interface. Furthermore, the dynamic experiment data is imported in both software tools.
In this paragraph an assessment is made of both software packages concerning the work
performed in the model building stage.
CAPE-OPEN
Both AspenTech and PSE claim that their software is fully CAPE-OPEN compliant,
however not all methods are supported by the property package exported from
AspenPlus. This was encountered when attempting to describe the vapour-liquid
equilibrium with the commonly used method named K-values. Furthermore, the method
Vapourpressure that is required when using the NRTL approach of describing the VLE,
returned values of 1e35 for all components, which cannot be trusted. Fortunately, the
methods LiquidFugacitycoeffient and VapourFugacitycoefficient are supported by the
property package, which makes it possible to describe the VLE with the iso-fugacity
equation. No compliancy problems were faced on the gPROMS side.
Another issue encountered using the CAPE-OPEN interface was the inability to set the
initial mass holdup of one or more components to zero. Even values smaller than 1e-5
caused gPROMS to fail during initialisation. No further investigation has been made to
whether the problem is on the gPROMS or on the AspenPlus side. The most robust
solution to this problem is to remove the redundant components and their thermodynamic
parameters in AspenPlus and export a new CAPE-OPEN package containing only the
components required in the model. When this solution is not possible for some reason, a
workaround is to run a simulation with the smallest values allowed and save the complete
variable set immediately after a successful initialisation. Use the saved variable set to
initialise a new simulation with smaller values for the components mass holdup where
necessary and again save the variable set just after initialisation. Repeating this procedure
eight times resulted in minimal values for the mass holdup of the relevant components of
1e-13 kg. The first, most robust solution is preferred and is applied in this work.
Summarizing, regarding the use of the CAPE-OPEN interface it is concluded that:
• The CAPE-OPEN thermodynamic and physical properties interface is
successfully applied to describe the vapour-liquid equilibrium.
• AspenPlus does not support all CAPE-OPEN methods when exporting a property
package.

27
• It is advised to remove redundant components and their binary interaction
parameters from a property package.
Experiment data input
What ACM and gPROMS have in common regarding experiment data input are the three
tabs where initial conditions, constant variables and measured variables and their
respective values are specified. For both software programs this can be done by copying
and pasting the values from a spreadsheet in e.g. MS Excel. A difference in the constant
variables tab is that ACM allows to specify constant and ramped (first order hold)
behaviour of a process variable e.g. temperature, where gPROMS has the option to
prescribe constant and piecewise constant (zero order hold) behaviour.
The most significant difference appears in the measured variables tab, where in gPROMS
it is possible to define all the variables and their values that are measured at various
points during the experiment. In ACM these values can be defined of one variable only as
a result of the structure where each variable in each experiment is accessed and edited in
a separate window. Due to this structure, 499 windows would have to be opened, edited
and closed in ACM opposed to 57 in gPROMS in order to perform the experiment data
input for this case study.
The software tools also differ regarding their options to exclude and re-include single
measurements, variables or complete experiments from a parameter estimation run.
Complete experiments can easily be in- or excluded in ACM by means of a tick-box
indicating whether an experiment is active. In gPROMS this can be done with similar
effort by placing or removing comment symbols {…} around or #… in front of the
experiment name in the estimation entity. The advantages of the having an open language
in gPROMS, which can also be represented and edited via a GUI, becomes clear when
excluding and re-including single measurements or measured variables. This can be done
in the language tab of an experiment entity, again by placing or removing comment
symbols. In ACM measured variables or single measurements can be removed from an
experiment via the GUI, this is however permanent and the measurement data is lost.
The conclusions drawn from comparing the experiment data input functionalities in ACM
and gPROMS are:
• Sets of measured values can be copied from a spreadsheet in e.g. MS Excel and
pasted into both software tools.
• The structure in ACM where each measured variable in each experiment is in a
separate window is very inconvenient for large data sets, in gPROMS all
measured variables and their values of an experiment are in a single table.
• Experiment data can easily be excluded and re-included in a parameter estimation
run in gPROMS due to its open language. Apart from complete experiments,
measured data can only be removed permanently and not re-included in ACM.

28
6 Parameter estimation
The various aspects of parameter estimation are discussed in this chapter. First the
development of the reaction scheme throughout the process of parameter estimation in
gPROMS is treated. Next, the solving methods of the two software packages are
highlighted in terms of the objective functions and the solvers that can be used to
minimize the objective function value. The performance of the various solving methods
is evaluated for three cases. The ability and the speed of the available solving methods to
find an optimal solution and the accuracy of the estimated parameters compared to their
standard deviations is assessed. For both software packages, their standard features for
the interpretation of the parameter estimation output results are investigated. Finally, the
conclusions drawn from these various aspects are summarized in the assessment
paragraph.
6.1 Reaction kinetics
The complete reaction scheme as introduced in paragraph 4.3 can be reduced to a
reaction scheme only taking into account the major components that are present in large
quantities in the liquid phase. Furthermore, from flash calculations it is concluded that
more than 99% of the total mixture is in the liquid phase. As a result of these
considerations, it is justified to approximate the kinetics of the reactions that involve the
major components by ignoring the reactions that are involved in forming the volatile
components. The reasons to simplify the kinetic scheme and perform model development
with this reduced scheme first, are to obtain insight in the process of model development
and to get initial guesses for the kinetic parameters of the reactions in the reduced scheme
when making the step to perform model development with the complete kinetic scheme.
Measurements at the end of a typical experiment show that the composition of the
mixture is such that four components are present in relatively large amounts, as can be
seen in Figure 6.1.
H20
H2SO4
SBA
MBS
SBE
t2-C4=
c2-C4=
1-C4=
Figure 6.1 Liquid mole composition in exp114 at t = 75 min.

29
6.1.1 Reaction kinetics reduced scheme
The reaction scheme is reduced to the reactions that involve the four major components
only, as presented in Figure 6.2. In order to maintain consistency with the complete
kinetic scheme, the numbering of the reaction rate constants is not changed.
C4
+ + H2SO4 MBS + H + (k7 and k8)
C4 + + H2O SBA + H + (k9 and k10)
Figure 6.2 Reduced reaction scheme.
The rate expressions for the components and the C4+ intermediate in the reduced scheme
are
]][[]][[ 8424742
++ +−= HMBSkSOHCkr SOH (6.1)
]][[]][[ 84247
++ −= HMBSkSOHCkrMBS (6.2)
]][[]][[ 102492
++ +−= HSBAkOHCkr OH (6.3)
]][[]][[ 10249
++ −= HSBAkOHCkrSBA (6.4)
=+4C
r ]][[]][[ 84247
++ +− HMBSkSOHCk (6.5)
]][[]][[ 10249
++ +− HSBAkOHCk
The concentration of the H+ intermediate is given by (6.6) where the Hammett acidity H0
is introduced, which follows from a correlation as presented in Appendix B.
010][
HH
−+ = (6.6)
The concentration of the C4+ intermediate cannot be measured directly or indirectly.
Therefore, the so-called Bodenstein approximation [11] is applied, which assumes that
the reaction rate of the intermediate is small and constant. In both the reduced and the
complete kinetic scheme these requirements are assumed to hold, resulting in
04
=+Cr (6.7)
Combining (6.5) with (6.7) and rearranging, results in the following expression for the
C4+ intermediate concentration
][][
][][][][
29427
108
4OHkSOHk
SBAkMBSkHC
+
+= ++ (6.8)

30
Next, this expression obtained as a result of the Bodenstein approximation is substituted
in the component rate expressions. Substituting (6.8) in (6.1) up to and including (6.4)
and rearranging results in component rate expressions that can be described by one
overall reaction rate r.
][][
]][[]][[][
29427
42107298
OHkSOHk
SBASOHkkMBSOHkkHr
+
−= + (6.9)
The component rate expressions are
rrr SBASOH ==42
(6.10)
rrr MBSOH −==2
(6.11)
The overall rate expression (6.9) is overparameterised, which becomes clear after
rearranging by dividing both numerator and denominator by k7. As can be seen from
equation (6.12), only three independent clusters of parameters appear, where there are
four individual parameters.
][][
]][[]][[
][
2
7
942
42102
7
98
OHk
kSOH
SBASOHkMBSOHk
kk
Hr
+
−
= + (6.12)
Applying the Bodenstein approximation reduced the number of independently observable
kinetic parameters by one. Instead of k7 and k9, only their ratio can be observed since
neither of both parameters appears individually in rate expression (6.12) and therefore the
parameter 9k ′ is introduced for which the following holds
7
9
9k
kk =′ (6.13)
Combining (6.12) and (6.13) results in
][][
]][[]][[][
2942
4210298
OHkSOH
SBASOHkMBSOHkkHr
′+
−′= + (6.14)
This overall rate is used to describe the component rate expressions and parameter
estimation is performed with the measurement data at a temperature of 60 °C. The first
aspect that should be considered with regards to interpreting parameter estimation output
is the ability to fit trends in the measurements. The overlay plots show that the predicted
values agree sufficiently with the measured values to confirm a good fit. Next, the
parameter accuracy is investigated. In this work it is considered that a parameter is

31
estimated with sufficient accuracy if the standard deviation is at least one order of
magnitude lower than the value of the estimated parameter. Furthermore, gPROMS
performs a t-test to investigate the individual parameter accuracy and a summary of the
parameter estimation output file is presented in Table 6.1.
Table 6.1 Summary of gPROMS parameter estimation output at T = 60 °C
A 95% t-value for a parameter component smaller than the reference t-value indicates that the data is not sufficient to estimate this parameter precisely.
Parameter Optimal Estimate 95% Confidence
Interval 95% t-value
Standard Deviation
k8 4.818019E+00 2.431668E+05 1.981364E-05 1.228733E+05
k’9 1.564989E-07 7.854225E-03 1.992545E-05 3.968777E-03
k10 3.603384E-07 1.533570E-08 2.349671E+01 7.749199E-09
Reference t-value (95%): 1.657715E+00
The gPROMS output file indicates that not all parameter are estimated with sufficient
accuracy. This conclusion can be drawn both from applying the previously mentioned
criterion on the standard deviation and from the information about the performed t-test.
The reason for the parameter inaccuracy becomes clear when considering the
denominator of the overall rate equation (6.14). Both concentrations that appear in the
denominator are of equal order of magnitude in the applied experiment data, 9k ′ is estimated to be in the order of 1e-7, thus for this dataset the following holds
][][ 4229 SOHOHk <<′ (6.15)
Allowing the simplification of (6.14) to
][
]][[]][[][
42
4210298
SOH
SBASOHkMBSOHkkHr
−′= + (6.16)
Rate expression (6.16) is over-parameterised due to the clustering of k8 and 9k ′ and therefore these two parameters are not individually observable. It is important to note that
the reason for the unobservability in this case is the lack of information in the experiment
data, which is different from the reason why parameters k7 and k9 were individually
unobservable. This was a direct effect of applying the Bodenstein approximation as
previously explained. In order to obtain a unique fit the parameter 9k ′′ is introduced, where
7
98
989k
kkkkk
⋅=′⋅=′′ (6.17)
Combining (6.16) and (6.17) leads to

32
][
]][[]][[][
42
421029
SOH
SBASOHkMBSOHkHr
−′′= + (6.18)
With overall rate equation (6.18) an alternative kinetic scheme is proposed and again
parameter estimation is performed. The overlay plots show a good fit and next the
parameter accuracy is investigated. A summary of the output is presented in Table 6.2.
Table 6.2 Summary of gPROMS parameter estimation output
Parameter Optimal Estimate 95% Confidence
Interval 95% t-value
Standard Deviation
k’’9 7.540134E-07 6.935782E-09 1.087135E+02 3.504683E-09
k10 3.603376E-07 2.781764E-09 1.295357E+02 1.405638E-09
Reference t-value (95%): 1.657715E+00
The 95% t-values of both estimated parameters are larger than the reference t-value,
indicating sufficient accuracy. This is confirmed by considering that the standard
deviation is more than two orders of magnitude lower than the estimated value. Note that
multiplying the previously estimated values of k8 and 9k ′ approximately gives the
estimated value of 9k ′′ . This explains why in estimating k8, 9k ′ and k10 the overlay plots
showed a good fit, although the parameters could not be obtained with sufficient
accuracy. We can now conclude that rate equation (6.18) in combination with (6.10) and
(6.11) describes the behaviour of the major components and that the kinetic parameters
9k ′′ and k10 can be determined accurately. Next, the values of 9k ′′ and k10 are estimated
using the experiments performed at the two other temperatures of 75 and 90 °C. An
overview of the results at the three different temperatures is presented in Table 6.3.
Table 6.3 Parameter estimation results for reduced scheme.
Temperature [°C] Parameter Optimal estimate Standard deviation
60 9k ′′ 7.540134E-07 3.504683E-09
k10 3.603376E-07 1.405638E-09
75 9k ′′ 6.282991E-06 5.263236E-08
k10 3.373953E-06 2.997604E-08
90 9k ′′ 3.320208E-05 4.056078E-07
k10 1.536291E-05 2.040826E-07

33
The parameter accuracy of both 9k ′′ and k10 is sufficient at all three temperatures since the
order of magnitude of the standard deviations is two orders of magnitude less than the
estimated values. Finally, the kinetic parameters of the Arrhenius equation that describes
the temperature dependant behaviour of ki need to be determined. The reaction rate ki of
reaction i depends on the reaction temperature T according to the Arrhenius equation
TR
E
ii
ia
ekk ⋅−
⋅=,
,0 (6.19)
Where R is the universal gas constant and k0,i and Ea,i respectively are the pre-exponential
factor and the activation energy of reaction i. As can be concluded from (6.19), the pre-
exponential factor k0,i is a reference ki at a temperature of infinity. It is better to re-
parameterise (6.19), introducing a different reference kref,i that is related to a reference
temperature Tref that can be chosen within the range of the actual experiment
temperatures [4], [8]. The re-parameterised Arrhenius equation is given by
−
⋅=TTR
E
irefi
ref
ia
ekk
11
,
,
(6.20)
This re-parameterised Arrhenius equation is introduced in the model and the kinetic
parameters kref,i and Ea,i are estimated using the experiment data from all three
temperatures and a reference temperature of Tref = 75 °C. The results are presented in
Table 6.4.
Table 6.4 Parameter estimation results for reduced scheme, all temperatures
Parameter Optimal estimate Standard deviation
9,refk ′′ 5.696409E-06 3.005909E-08
kref,10 2.850522E-06 1.594955E-08
9,aE ′′ 1.330211E+05 3.907733E+02
Ea,10 1.322812E+05 3.906087E+02
Again sufficient accuracy is achieved and with these four parameters the time dependent
and the temperature dependant behaviour of the major components in all experiments
using the reduced reaction scheme is described.

34
6.1.2 Reaction kinetics complete scheme
For the complete kinetic scheme a similar approach is used as for the reduced kinetic
scheme. The complete kinetic scheme is displayed again in Figure 6.3, to aid the reader in
the derivation of the resulting component rate expressions.
1-C4 + H+ C4
+ (k1 and k2)
c2-C4 + H+ C4+ (k3 and k4)
t2-C4 + H+ C4+ (k5 and k6)
C4+ + H2SO4 MBS + H+ (k7 and k8)
C4+ + H2O SBA + H+ (k9 and k10)
C4+ + SBA SBE + H+ (k11 and k12)
Figure 6.3 Complete reaction scheme.
The resulting component rate expressions are
][]][1[ 42411 4
++− +−−= CkHCkr C (6.21)
][]][2[ 44432 4
++− +−−= CkHCckr Cc (6.22)
][]][2[ 46452 4
++− +−−= CkHCtkr Ct (6.23)
]][[]][[ 8424742
++ +−= HMBSkSOHCkr SOH (6.24)
]][[]][[ 84247
++ −= HMBSkSOHCkrMBS (6.25)
]][[]][[ 102492
++ +−= HSBAkOHCkr OH (6.26)
]][[]][[ 12411
++ −= HSBEkSBACkrSBE (6.27)
=SBAr ]][[]][[ 10249
++ − HSBAkOHCk (6.28)
]][[]][[ 12411
++ +− HSBEkSBACk

35
=+4C
r +−−+−− ++++ ][]][2[][]][1[ 44434241 CkHCckCkHCk
+−−− +++ ]][[][]][2[ 42474645 SOHCkCkHCtk
(6.29)
]][[]][[]][[ 102498
+++ +− HSBAkOHCkHMBSk
]][[]][[ 12411
++ +− HSBEkSBACk
010][
HH
−+ = (6.30)
Applying the Bodenstein approximation for the complete scheme, combining (6.7) and
(6.29), results in the following expression for the concentration of C4+ as a function of the
kinetic parameters and the concentration of the other components
][][][
][][][]2[]2[]1[][][
1129427642
12108454341
4SBAkOHkSOHkkkk
SBEkSBAkMBSkCtkCckCkHC
+++++
+++−+−+−= ++
(6.31)
Substituting the expression for [C4+] in the original component rate expressions (6.21) up
to and including (6.28), rearranging and dividing numerator and denominator by k7
(similar to the approach for the reduced scheme), leads to the following component rate
expressions (6.32) to (6.39). These expressions are presented such that the clustering of
individual parameters is clearly visible.
=− 41 Cr (6.32)
+++−+−+ ][][][]2[]2[][7
122
7
102
7
82
4
7
52
4
7
32 SBEk
kkSBA
k
kkMBS
k
kkCt
k
kkCc
k
kkH
+
+++⋅−− ][][][]1[
7
1112
7
91421
7
61
7
414 SBA
k
kkOH
k
kkSOHk
k
kk
k
kkC
_____________________________________________________________
][][][7
112
7
9
42
7
6
7
4
7
2 SBAk
kOH
k
kSOH
k
k
k
k
k
k+++++

36
=− 42 Ccr (6.33)
+++−+−+ ][][][]2[]1[][7
124
7
104
7
84
4
7
54
4
7
41 SBEk
kkSBA
k
kkMBS
k
kkCt
k
kkC
k
kkH
+
+++⋅−− ][][][]2[
7
1132
7
93423
7
63
7
324 SBA
k
kkOH
k
kkSOHk
k
kk
k
kkCc
_____________________________________________________________
][][][7
112
7
9
42
7
6
7
4
7
2 SBAk
kOH
k
kSOH
k
k
k
k
k
k+++++
=− 42 Ctr (6.34)
+++−+−+ ][][][]2[]1[][7
126
7
106
7
86
4
7
63
4
7
61 SBEk
kkSBA
k
kkMBS
k
kkCc
k
kkC
k
kkH
+
+++⋅−− ][][][]2[
7
1152
7
95425
7
54
7
524 SBA
k
kkOH
k
kkSOHk
k
kk
k
kkCt
_____________________________________________________________
][][][7
112
7
9
42
7
6
7
4
7
2 SBAk
kOH
k
kSOH
k
k
k
k
k
k+++++
=42SOHr (6.35)
+
+++⋅++ ][][][][
7
1182
7
98
7
86
7
84
7
82 SBAk
kkOH
k
kk
k
kk
k
kk
k
kkMBSH
( )}][][]2[]2[]1[][ 121045434142 SBEkSBAkCtkCckCkSOH ++−+−+−⋅−
____________________________________________________________
][][][7
112
7
9
42
7
6
7
4
7
2 SBAk
kOH
k
kSOH
k
k
k
k
k
k+++++

37
=MBSr (6.36)
+
+++⋅−+ ][][][][
7
1182
7
98
7
86
7
84
7
82 SBAk
kkOH
k
kk
k
kk
k
kk
k
kkMBSH
( )}][][]2[]2[]1[][ 121045434142 SBEkSBAkCtkCckCkSOH ++−+−+−⋅+
____________________________________________________________
][][][7
112
7
9
42
7
6
7
4
7
2 SBAk
kOH
k
kSOH
k
k
k
k
k
k+++++
=OHr 2 (6.37)
++−+−+−⋅−+ ][]2[]2[]1[][][
7
984
7
954
7
934
7
912 MBS
k
kkCt
k
kkCc
k
kkC
k
kkOHH
++++⋅+
][][][][
7
111042
7
106
7
104
7
102
7
129 SBAk
kkSOH
k
kk
k
kk
k
kkSBASBE
k
kk
_____________________________________________________________
][][][7
112
7
9
42
7
6
7
4
7
2 SBAk
kOH
k
kSOH
k
k
k
k
k
k+++++
=SBEr (6.38)
+
+−+−+−⋅+ ][]2[]2[]1[][][
7
1184
7
1154
7
1134
7
111 MBSk
kkCt
k
kkCc
k
kkC
k
kkSBAH
++++⋅−
][][][][ 2
7
1294212
7
126
7
124
7
122
7
1110 OHk
kkSOHk
k
kk
k
kk
k
kkSBESBA
k
kk
_____________________________________________________________
][][][7
112
7
9
42
7
6
7
4
7
2 SBAk
kOH
k
kSOH
k
k
k
k
k
k+++++

38
=SBAr (6.39)
( )
+−+−+−⋅
−+ ][]2[]2[]1[][][][ 8454341
7
112
7
9 MBSkCtkCckCkSBAk
kOH
k
kH
( )
+++⋅−− ][][][ 42
7
6
7
4
7
21210 SOH
k
k
k
k
k
kSBEkSBAk
_____________________________________________________________
][][][7
112
7
9
42
7
6
7
4
7
2 SBAk
kOH
k
kSOH
k
k
k
k
k
k+++++
Similar to the approach for the reduced scheme, applying the Bodenstein approximation
reduces the number of independently determinable parameters by one. For the complete
scheme, the parameters that have become observable only in relation to k7 as a result of
applying the Bodenstein approximation are: k2, k4, k6, k9 and k11. A new set of parameters
is introduced: 2k ′ , 4k ′ , 6k ′ , 9k ′ and 11k ′ for which it holds that
7k
kk i
i =′ ; i = 2, 4, 6, 9, 11 (6.40)
The complete set including the new kinetic parameters is estimated with the experiment
data at 60 °C. A summary of the output is presented in Table 6.5.
Table 6.5 Parameter estimation output complete scheme at T = 60 °C.
A 95% t-value for a parameter component smaller than the reference t-value indicates that the data is not sufficient to estimate this parameter precisely.
Parameter Optimal Estimate 95% Confidence
Interval 95% t-value
Standard Deviation
k1 4.761434E-06 8.556002E-08 5.565022E+01 4.346984E-08
k’2 7.150141E-05 1.478812E-01 4.835058E-04 7.513289E-02
k3 7.534677E-06 1.312637E-07 5.740109E+01 6.669015E-08
k’4 9.864279E-04 2.040164E+00 4.835043E-04 1.036531E+00
k5 4.694857E-06 8.984409E-08 5.225559E+01 4.564642E-08
k’6 9.517142E-04 1.968360E+00 4.835061E-04 1.000050E+00
k8 2.213487E+00 4.577868E+03 4.835192E-04 2.325843E+03
k’9 4.886781E-07 1.010665E-03 4.835214E-04 5.134810E-04
k10 5.232387E-07 2.367798E-09 2.209812E+02 1.202989E-09
k’11 1.584490E-08 3.277003E-05 4.835180E-04 1.664922E-05
k12 5.170035E-08 2.045581E-08 2.527417E+00 1.039283E-08
Reference t-value (95%): 1.649902E+00

39
From Table 6.5 it becomes clear that 2k ′ , 4k ′ , 6k ′ , k8, 9k ′ and 11k ′ cannot be estimated with sufficient accuracy, as indicated by their 95% t-values and standard deviations with
respect to the estimated values. The reason for the inability to estimate these parameters
accurately is clustering, which is indicated by the correlation matrix presented in Table
6.6.
Table 6.6 Correlation matrix complete scheme at T = 60 °C.
k1 2k ′ k3 4k ′ k5 6k ′ k8 9k ′ k10 11k ′ k12
k1 1
2k ′ 0.34 1
k3 0.15 0.34 1
4k ′ 0.34 1.00 0.34 1
k5 0.13 0.28 0.15 0.28 1
6k ′ 0.34 1.00 0.34 1.00 0.28 1
k8 -0.34 -1.00 -0.34 -1.00 -0.28 -1.00 1
9k ′ 0.34 1.00 0.34 1.00 0.28 1.00 -1.00 1
k10 -0.02 -0.07 -0.02 -0.07 0.01 -0.07 0.07 -0.07 1
11k ′ 0.34 1.00 0.34 1.00 0.28 1.00 -1.00 1.00 -0.07 1
k12 0.00 -0.02 0.00 -0.02 0.00 -0.02 0.02 -0.02 -0.03 -0.02 1
The cross-correlations of the parameters 2k ′ , 4k ′ , 6k ′ , k8, 9k ′ and 11k ′ are all one or minus one, indicating that they are all completely coupled due to the clustering in the
component rate expressions. From the components rate expressions (6.32) up to and
including (6.39), it can be concluded that all except one of the coupled parameters are
also present outside a cluster of parameters. The one parameter that only appears
clustered is k8. Therefore, similar to the reduced scheme a new set of parameters is
introduced for which the following holds
7
8
8k
kkkkk i
ii
⋅=′⋅=′′ ; i = 2, 4, 6, 9, 11 (6.41)
Parameter estimation is performed with the complete set, including the newly defined
parameters and the overlay plots show a good fit. The result for the parameter estimates
and their accuracy is presented in Table 6.7.

40
Table 6.7 Parameter estimation output complete scheme at T = 60 °C.
Parameter Optimal Estimate 95% Confidence
Interval 95% t-value
Standard Deviation
k1 4.761457E-06 8.203025E-08 5.804514E+01 4.167649E-08
k’’2 1.582677E-04 1.493950E-06 1.059391E+02 7.590201E-07
k3 7.534717E-06 1.260763E-07 5.976313E+01 6.405466E-08
k’’4 2.183451E-03 2.453116E-05 8.900725E+01 1.246336E-05
k5 4.694869E-06 8.781254E-08 5.346468E+01 4.461426E-08
k’’6 2.106610E-03 2.148849E-05 9.803437E+01 1.091749E-05
k’’9 1.081686E-06 8.733718E-09 1.238517E+02 4.437275E-09
k10 5.232403E-07 2.405954E-09 2.174773E+02 1.222375E-09
k’’11 3.507204E-08 6.196273E-10 5.660184E+01 3.148094E-10
k12 5.168586E-08 2.045040E-08 2.527377E+00 1.039008E-08
Reference t-value (95%): 1.649902E+00
All parameters can be determined with sufficient accuracy according to the t-test. Except
for k12, the standard deviations are all small enough compared to the estimated values of
the parameters. Furthermore, introducing new parameters had the desired effect of
decoupling the complete set of kinetic parameters as can be seen in the correlation matrix
in Table 6.8.
Table 6.8 Correlation matrix complete scheme at T = 60 °C.
k1 2k ′′ k3 4k ′′ k5 6k ′′ 9k ′′ k10 11k ′′ k12
k1 1
2k ′′ 0.88 1
k3 0.08 -0.01 1
4k ′′ 0.01 0.00 0.92 1
k5 0.07 0.00 0.09 0.03 1
6k ′′ 0.00 0.01 0.01 0.03 0.90 1
9k ′′ -0.15 0.12 -0.17 0.05 -0.13 0.10 1
k10 0.04 0.12 0.04 0.10 0.06 0.11 0.73 1
11k ′′ -0.04 0.00 -0.04 -0.01 -0.04 0.00 0.06 -0.06 1
k12 0.01 0.00 0.01 0.00 0.00 0.00 -0.02 -0.03 0.82 1
The results of parameter estimation with the complete reaction scheme and the newly
introduced parameters are satisfactory for the experiment data at 60 °C. Next, the kinetic
parameters at the other temperatures of 75 °C and 90 °C are estimated. This proved
unsuccessful for the experiment data at 90 °C, due to lack of information in the data. At
higher temperatures, the reactions occur faster and steady state is reached quickly. The
experiment data at 90 °C shows little variation, which suggest that the reactions were

41
near steady state during those measurements. As in the reduced scheme, the final step is
to estimate the kinetic parameters kref and Ea in equation (6.42), which describes the
temperature dependent behaviour of the reactions. Again the reference temperature is
chosen in the middle of the investigated range, at 75 °C.
−
⋅=TTR
E
irefi
ref
ia
ekk
11
,
,
(6.42)
The results of parameter estimation with the complete scheme with the newly introduced
parameters, using all experiment data are presented in Table 6.9.
Table 6.9 Parameter estimation results for complete scheme.
Parameter Optimal
estimate
Standard
deviation
kref,1 1.654031E-05 1.166450E-07
2,refk ′′ 9.634294E-04 4.961189E-06
kref,3 2.733107E-05 2.336426E-07
4,refk ′′ 1.270317E-02 9.044965E-05
kref,5 1.401267E-05 9.320541E-08
6,refk ′′ 1.098498E-02 4.971996E-05
9,refk ′′ 1.067818E-05 7.025021E-08
kref,10 5.656640E-06 3.539302E-08
11,refk ′′ 3.317467E-07 1.451926E-09
kref,12 1.161906E-06 2.716320E-08
Ea,1 7.109098E+04 6.497152E+02
2,aE ′′ 1.133150E+05 4.041160E+02
Ea,3 7.630520E+04 6.953930E+02
4,aE ′′ 1.113993E+05 5.319371E+02
Ea,5 5.974739E+04 6.347992E+02
6,aE ′′ 1.022666E+05 3.654522E+02
9,aE ′′ 1.574787E+05 4.402616E+02
Ea,10 1.557858E+05 4.108734E+02
11,aE ′′ 1.507085E+05 3.836134E+02
Ea,12 1.499830E+05 2.077247E+03
As the results in Table 6.9 indicate, the accuracy is sufficient for all parameters. It is
concluded that the kinetic parameters of the complete reaction scheme with the newly
introduced parameters can be determined sufficiently accurate in combination with the
available measurement data. Although the parameter values are accurately determined, it

42
is important to recognize that the model with this set of parameters will probably not
accurately describe experiments under conditions where the reduction of the set 2k ′ , 4k ′ ,
6k ′ , k8, 9k ′ and 11k ′ to the set of parameters 2k ′′ , 4k ′′ , 6k ′′ , 9k ′′ and 11k ′ is no longer valid. From the analysis of the reduced scheme it follows that the case that equation (6.15) no
longer holds, could lead to such a the situation.
6.2 Solving methods
In both software tools, the mathematical problem to be solved in order to obtain optimal
parameter estimates is the minimization of an objective function. The combination of an
objective function with a solver is referred to as a solving method. For gPROMS, one
objective function is available, which is minimized with one specifically designed solver,
resulting in one solving method. For ACM, the user can choose from two objective
functions, each of which can be solved by two solvers, leaving four solving methods. A
schematic overview of the objective functions and their solvers of both software tools is
presented in Figure 6.4.
Software
package
gPROMS ACM
Objective
function
Max log
likelihood
Least
squares
Max log
likelihood
Optimisation
solver
MXLKHD
(indirect)
NL2SOL
(indirect)
Nelder-Mead
(direct)
FEASOPT
(indirect) Figure 6.4 Overview of solving methods for both software packages.
In this chapter, first the objective functions will be discussed for each software package,
followed by the various optimisation solvers.
6.2.1 Objective functions
In general, the process of parameter estimation is obtaining values for a set of model
parameters θ such that the set of predicted model output ( )θz agrees best with the set of

43
measured values z~ . The qualification ‘agrees best’ can be specified in various ways and
depends on how the objective function is defined. The difference between the measured
values and the predicted model output for measurement i is
( )iii zz θξ −= ~ (6.43)
The principle of maximum likelihood estimation takes into account disturbances and
measurement noise, assuming stochastic behaviour for iξ [5]. The Gaussian probability
density function, which assumes iξ is independent and normally distributed with zero
means and standard deviation iσ , for the total number of measurements N is
( )∑
=
−N
i i
i
ep
N
i
i
2
2
2
2
1 σ
ξ
σπξ (6.44)
Combining with (6.43) gives
( )( )( )
∑
=
−−
N
i i
ii zzN
i
i ezp2
2
2
~
2
1;~
σ
θ
σπθ (6.45)
This function describes the probability of iz~ for a known set of model parameters θ. In
the reverse case when iz~ is known and θ unknown, (6.45) is changed from the á priori
probability density function to the following á posteriori likelihood function
( )( )( )
∑
=
−−
N
i i
ii zzN
i
i ezL2
2
2
~
2
1;~
σ
θ
σπθ (6.46)
The maximum of this likelihood function ( )θ;~izL with corresponding argument θ̂ , gives the values for the set of unknown model parameters θ for which the plausibility is
maximal that the corresponding iz~ would have been measured. The algebraic maximum
of L is found in the set θ̂ , where the first derivate with respect to θ is zero and around θ̂ the sign of the first derivative changes from positive to negative. Finding the maximum
of L is equivalent to finding the minimum of )ln(L− , as follows from
( )( ) ( )( )
θθθ ∂∂−
=∂∂
∂−∂
=∂
−∂ L
L
L
L
LL 1lnln (6.47)
The objective function to be minimized when applying maximum likelihood is thus

44
( )( ) ( ) ( )( )( )
2
2
2
~
ln2ln2
;~lni
N
i ii
ii
zzN
NzL
σ
θσπθ ∑ −
++=− (6.48)
Minimizing (6.48) for the special case of a constant standard deviation σi is equivalent to
minimizing the weighted least squares objective (6.49)
( )( )
−∑N
i ii
i
zz2
2
~1min θ
σθ (6.49)
When the standard deviation is equal for all measurements, the weighting factor is
unnecessary, reducing the problem to the minimization of the normal least squares
function.
In both software programs a distinction in the measurements is made in three levels, each
with a separate index. The experiment number is indicated by i, the measured variable
has index j and for dynamic experiments the measurement number is labeled k.
Furthermore, the inequality constraints on the parameters to be estimated are given by
lower and upper bounds
UL θθθ ≤≤ (6.50)
The model equations provide the equality constraints to which the optimisation of θ is
subjected.
gPROMS
The maximal log likelihood objective function is implemented in gPROMS as follows
( ) ( ) ( )
−++=Φ ∑∑∑
= = =
NE
i
NV
j
NM
k ijk
ijkijk
ijk
i ij zzN
1 1 12
2
2
~
lnmin2
12ln
2 σσπ
θ (6.51)
This is identical to what is expected from theory as presented in equation (6.48). Various
variance models can be applied as presented in Table 6.10.
Table 6.10 Variance models in gPROMS.
Variance model Mathematical description
Constant variance 22 ωσ =
Constant relative variance predicted values ( )εωσ += z22
Constant relative variance measured values ( )εωσ += z~22
Heteroscedastic predicted values ( )γεωσ += z22
Heteroscedastic measured values ( )γεωσ += z~22

45
Any of the available variance models can be described by the accompanying
heteroscedastic formulation, where the value of γ is bounded between 0 and 1. The
heteroscedasticity parameters ω and γ can be given fixed values or they can be
determined as a part of the estimation.
ACM
The maximal log likelihood objective function for dynamic experiments is implemented
in ACM as
( )( ) ( )
+
−++ ∑∑∑ ∑∑
= == = =
NE
j
NM
k
ijkj
NV
i
i
NE
j
NM
k ijk
ijkijk
jiii
ijij
i
zWz
zzWnnn
1 11
2
1 1
2 ~ln~
~
ln12ln2
1min λπ λθ
(6.52)
Due to an alternative implementation, the heteroscedasticity parameter is bounded
between 0 and 2 and therefore indicated with λ.
A second option is the weighted least squares objective function, implemented as the
following minimization problem
( )
−∑∑∑= = =
NE
i
NV
j
NM
k
ijkijkijk
i ij
zzW1 1 1
22 ~minθ
(6.53)
It is advised in the documentation to set the weights of the measured variables to the
reciprocal of the standard deviation. The resulting minimization problem is identical to
(6.48) as derived from the maximal likelihood formulation with a constant standard
deviation.
6.2.2 Optimisation solvers
gPROMS MXLKHD
One solver named MXLKHD is available for parameter estimation, which is specifically
designed for solving maximal likelihood optimisation problems. This solver applies a
sophisticated sequential quadratic programming (SQP) method to find the global
optimum. It is an indirect solver since it calculates the objective function gradient with
respect to the parameters to be estimated and uses this 1st order derivative information to
determine its search direction. Several settings of the solver can be adjusted as is clearly
explained in [21].

46
ACM
Nelder-Mead
Both objective functions can be minimized using the direct Nelder-Mead solver. This is a
direct solver, as it does not make use of any 1st order derivative information. It is a
simplex method for the minimization of a function of n variables, which depends on
comparison of function values at the (n + 1) vertices of a general simplex, followed by
the replacement of the vertex with the highest value [17]. The general idea can be
illustrated by an example where n = 2, as shown in Figure 6.5.
Figure 6.5 Nelder-Mead simplex method for n = 2.
The function values of the three vertices of the simplex are determined by function
evaluation and the function value of vertex p1 is the highest. This vertex is replaced by p4,
which is the reflection of p1 through the centroid of the initial simplex, multiplied by a
reflection factor. Next, the function value of p4 is computed and again the highest
function value is replaced. Apart from reflection, the simplex can also contract or expand,
depending on whether the new point is a new minimum or still the maximum function
value of the vertices.
This solver requires many iterations, which itself are computationally cheap since they
only involve function evaluations and no gradient or Hessian information [17].
Furthermore, it is a robust solver, which will most certainly find a solution. The simplex
can however be trapped in a local minimum and it is advised to perform the optimisation
starting from various initial points to make sure that the proposed solution is indeed the
global minimum. The Nelder-Mead solver proved to be fast for estimating the four
parameters of the reduced reaction scheme, but very slow for the 20 parameters of the
complete reaction scheme.
NL2SOL
This solver can be applied only in combination with the Least Squares objective function.
It is a dense adaptive non-linear least squares algorithm developed by Dennis, Gay and
Welsch [6]. It is an indirect solver since it calculates gradient information. NL2SOL
maintains a secant approximation to the second-order part of the least squares Hessian
and adaptively decides when to use this approximation. The step choice algorithm is
p1
p2
p3
p2
p3
p4

47
based on minimizing a local quadratic model of the sum of squares function constrained
to an elliptical trust region centred at the current approximate minimiser.
FEASOPT
This feasible optimisation solver can only be applied in combination with the maximal
log likelihood objective function. The actual solver is VF02AD, which is a dense
sequential quadratic programming method from the Harwell subroutine library [10]. It is
based on the BFGS algorithm that minimizes a Lagrange multiplier penalty function,
subject to nonlinear equality and inequality constraints. FEASOPT makes use of
derivative information and is therefore an indirect solver.
6.3 Performance
The performance of the parameter estimation in both software packages is first assessed
in terms of ability and speed of obtaining an optimal solution. This is followed by an
assessment on the accuracy of the solution.
6.3.1 Ability and speed
An overview of the performance of the solving methods in terms of ability, and CPU time
is presented in Table 6.11. The computer central processing unit is 2.66 GHz with 1 GB
RAM. In the first case where two parameters are estimated in the reduced scheme, the
experiments at 60 °C are used.
Table 6.11 CPU time [h] for various parameter estimation cases.
Software package
gPROMS ACM
Objective function
MLL LSQ MLL
Optimisation
solver
MXLKHD NL2SOL NM NM FEASOPT
Reduced scheme
(2 parameters)
0.0291 0.1944 0.4717 0.3781 1.2242
Reduced scheme
(4 parameters)
0.2902 1.1511 3.9886 3.1522 3.5011
Complete scheme
(20 parameters)
0.7053 2.954 29.833 33.559 failed

48
From Table 6.11 it can be concluded that gPROMS performs best in terms of ability and
required CPU time to find the optimal solution. Furthermore, for ACM the combination
of the Least Squares objective function with the NL2SOL optimisation solver performs
better than the other combinations possible. The Nelder-Mead optimisation solver is
reasonably fast for a small problem (with little parameters), but the required CPU-time
increases significantly with the number of parameters to be estimated.
6.3.2 Accuracy
Apart from the ability and speed of finding an optimal solution to the parameter
estimation problem, also the accuracy of the solution is of interest. A measure for the
parameter accuracy is the ratio between the estimated value and corresponding the
standard deviation, according to
2,
ˆ
i
iiaccr
σθ
= (6.54)
In this case study, an accuracy ratio equal to 10 is considered to be sufficient, where a
ratio larger than 100 is qualified as very good. The parameter estimation results for both
software packages, with the solving methods in ACM that resulted in the highest and the
lowest accuracy ratios for that case, are presented in Tables 6.12 up to and including
6.14, corresponding to the three cases in Table 6.11.
Table 6.12 Optimal estimate and accuracy ratio for case: Reduced scheme (2 parameters).
gPROMS ACM LSQ NM ACM MLL NM
θ̂ racc θ̂ racc θ̂ racc
9k ′′ 7.540E-07 215 7.946E-07 35.0 7.728E-07 28.4
k10 3.603E-07 265 3.721E-07 41.0 3.760E-07 22.2
For this case it is concluded that for both software packages the estimated parameters are
very similar and that all accuracy ratios indicate sufficient accuracy. For gPROMS the
accuracy ratios are higher then for the best result in ACM.
Table 6.13 Optimal estimate and accuracy ratio for case: Reduced scheme (4 parameters).
gPROMS ACM LSQ NL2SOL ACM MLL NM
θ̂ racc θ̂ racc θ̂ racc
9,refk ′′ 5.696E-06 190 6.117E-06 27.0 5.872E-06 14.7
kref,10 2.851E-06 179 3.040E-06 25.4 2.943E-06 13.3
9,aE ′′ 1.330E+05 340 1.343E+05 48.7 1.295E+05 26.5
Ea,10 1.323E+05 339 1.343E+05 48.0 1.291E+05 23.4

49
Table 6.13 shows that again the values of the estimated parameters are similar for the
three solving methods and that all accuracy ratios are larger than 10 indicating sufficient
accuracy.
Table 6.14 Optimal estimate and accuracy ratio for case: Complete scheme (20 parameters).
gPROMS ACM LSQ NL2SOL ACM MLL NM
θ̂ racc θ̂ racc θ̂ racc
kref,1 1.654E-05 142 2.316E-05 10.0 4.993E-02 0.000276
2,refk ′′ 9.634E-04 194 1.345E-06 13.3 1.965E-03 0.000276
kref,3 2.733E-05 117 3.629E-05 9.20 1.879E-05 0.795
4,refk ′′ 1.270E-02 140 1.690E-05 11.0 9.382E-06 0.945
kref,5 1.401E-05 150 1.846E-05 10.9 1.243E-05 1.23
6,refk ′′ 1.098E-02 221 1.452E-05 16.1 1.052E-05 1.70
9,refk ′′ 1.068E-05 152 1.082E-05 12.2 3.965E-06 22.5
kref,10 5.657E-06 160 5.786E-06 12.7 2.450E-06 23.2
11,refk ′′ 3.317E-07 228 3.341E-07 15.5 3.801E-07 2.05
kref,12 1.162E-06 42.8 1.168E-06 3.06 1.593E-06 0.867
Ea,1 7.109E+04 109 1.029E+05 10.5 1.000E+05 0.000340
Ea,2 1.133E+05 280 1.348E+05 21.6 1.000E+05 0.000395
Ea,3 7.630E+04 110 8.642E+04 9.56 1.000E+05 0.890
Ea,4 1.114E+05 209 1.204E+05 17.4 1.050E+05 1.22
Ea,5 5.975E+04 94.1 6.982E+04 7.89 1.000E+05 1.18
Ea,6 1.023E+05 280 1.102E+05 21.5 1.011E+05 1.95
Ea,9 1.575E+05 358 1.588E+05 27.7 1.000E+05 28.5
Ea,10 1.558E+05 379 1.572E+05 29.3 1.065E+05 32.5
Ea,11 1.507E+05 393 1.508E+05 26.3 1.000E+05 1.61
Ea,12 1.500E+05 72.2 1.484E+05 4.73 1.000E+05 0.782
Comparing the optimal estimates in Table 6.14 from the gPROMS and the ACM LSQ
NL2SOL parameter estimation, it is concluded that the values for the parameters in
reactions 9 up to and including 12, which are related to the major components are very
similar; their relative difference is less than 3%. The parameters 2,refk ′′ , 4,refk ′′ and 6,refk ′′ ,
which are related to the formation of the three butenes, differ significantly with about
7.5e4 %. This is probably due to the fact that different objective functions are applied in
combination with different optimisation solvers. The accuracy ratio is sufficient for most
parameters in the ACM LSQ NL2SOL method and very good for gPROMS.

50
In all three cases the ACM MLL NM method resulted in the poorest accuracy ratio. In the
first two cases, the optimal estimates are close to the values found with the best method
in ACM for that case. This does not hold for the last case with 20 parameters and in
combination with the very low accuracy ratios, this leads to distrust the results for the
ACM MLL NM method in this case. The most accurate method in ACM is considered to
be the LSQ NL2SOL combination, with the highest accuracy ratios for the last two cases
and near-best ratios in the first case. In all three cases, gPROMS has the highest accuracy
ratios, which are roughly a factor of 10 higher than the ACM LSQ NL2SOL method.
6.3.3 Effect of optimisation tolerance
The sensitivity of the optimal solution with respect to the optimisation tolerance is
investigated for gPROMS and the most accurate solving method in ACM, which is the
LSQ NL2SOL combination. Both software packages offer a variety of tolerances in their
solvers used for parameter estimation, in this analysis the optimisation tolerance that
determines the optimisation termination criterion is of interest. The results for parameter
kref,3 in the complete scheme are displayed in Figure 6.6, showing the typical behaviour
that is observed for all parameters. On the vertical axis the value of the optimal estimate
is displayed and the numbers 1 up to 9 on the horizontal axis correspond to the elements
in the vector of values used for the optimisation tolerance according to (6.55)
[ ]1119171615141312111 −−−−−−−−− eeeeeeeee (6.55)
0.00E+00
1.00E-05
2.00E-05
3.00E-05
4.00E-05
5.00E-05
0 2 4 6 8 10
Kre
f 3 [s^-1
]
gPROMS ACM
Figure 6.6 Optimal estimate as a function of optimisation tolerance specified in (6.55)
The time required to obtain the solution as a function of the optimisation tolerance
specified in (6.55) is presented in Figure 6.7.

51
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
0 2 4 6 8 10
tim
e [h]
gPROMS ACM
Figure 6.7 Time required to obtain solution as a function of optimisation tolerance specified in (6.55)
For gPROMS the estimator optimisation tolerance named OptTol has an effect on the
solution over the entire range of applied values in vector (6.55). Tightening the tolerance
beyond 1e-6 no longer has significant effect on the estimated value, it does have effect
however on the time required to obtain the optimal solution.
For ACM it was found that tightening the estimator optimisation tolerance named
Solution convergence tolerance beyond 1e-4 has no effect on the values of the parameter
estimates and on the time required to obtain the solution. The reason for this was found to
be that ACM LSQ NL2SOL uses three termination criteria and whichever one is met
first, causes the optimisation to terminate and present the solution. These criteria are:
Solution convergence tolerance, Relative function tolerance and Absolute function
tolerance. Tightening the Solution convergence tolerance beyond 1e-4 caused the
optimisation to terminate on the Relative function tolerance for which the default value of
1e-6 was used. It was attempted to tighten the Relative function tolerance, this resulted in
failing optimisations and required adjusting other solver settings and was not further
investigated.
6.4 Output interpretation
Once the parameter estimation with one of the CAPE tools is successfully completed, the
output should be carefully examined. One cannot just take the values of the predicted
parameters and claim they are correct “because the software program calculated it”. The
output interpretation can be divided into two parts. First, what should be investigated is
how the predicted model outputs compare with the measured values from experiments.
This is usually done graphically with the use of so-called overlay plots. Secondly, the
statistical significance and accuracy of the estimated parameters should be analyzed.
Further statistical information, such as a correlation matrix and confidence ellipsoids, can
provide additional insight in the problem under investigation. Both parts of output
interpretation are discussed for both software tools in this paragraph.

52
6.4.1 Overlay plots
In order to have a general idea whether the model is capable of describing the observed
behaviour in the experiments, the predicted model output is compared with measured
values in overlay plots. These plots give a good indication if the model can predict trends
in the measured data. When this is not the case, we speak of a bad fit and an alternative
model should be suggested. In case of good resemblance at first sight, the next step is to
investigate the residuals, which are the differences between the predicted and measured
values. Patterns in the residuals indicate a systematic mismatch and a lack of encaptured
system behaviour in the model. Ideally, the residuals should appear to be randomly
distributed around a zero mean. For both software tools, the accessibility and
functionality of overlay and residual plots is discussed.
ACM
The functionality of making overlay plots is available in ACM. It is found under the tab
Tools, Estimation, Dynamic Experiments. Here the user can choose an experiment and
click Edit, than choose a measured variable and Edit again. The resulting window is the
same where the experiment data input takes place and where the predicted values are
stored after an estimation run is successfully completed. Furthermore, provided the
predicted values are available after a successful parameter estimation run, the absolute,
relative and standardized residuals are calculated and presented in the same table.
Clicking the Plot button generates an overlay plot of the measured and predicted values.
If the predicted values available are not available, the user is made aware of this via a
pop-up message and a plot is generated of the measured values only. There is an option to
plot the predicted values at measurement times connected by straight lines, or to plot a
continuous curve, which requires a simulation of that particular experiment with the
estimated model parameters to calculate the specific model output over the entire
experiment duration. An example of an overlay plot with a continuous curve of the liquid
mass fraction of component MBS during experiment 105 is presented in Figure 6.8.
Estimation: Measured Variable - R_105
Time: Hours
B1.xmf1("MBS") kg/kg
0 0.5 1 1.5 2 2.5 3 3.5 4
0.1
0.15
0.2
Observed
Predicted
Figure 6.8 Continuous overlay plot of liquid mass fraction MBS in experiment 105.

53
The overlay plot gives a good indication if the measured values and predicted model
output agree; in this case the fit is good. Although the residuals are calculated and
presented in a table together with the measured and predicted values, there is no option to
generate residual plots. Since the option to generate overlay plots is in the measurement
data input window, the same inconvenience that was encountered during data input exists
in the generation of overlay plots. A separate window needs to be opened for each
variable in each experiment, therefore only one overlay plot such as Figure 6.8 can be
created at a time. If the user would like to get an overview of all available overlay plots,
133 in this case study, he is required to repeat a sequence of at least four mouse-clicks,
resulting in a minimum of 532 mouse-clicks. This is considered to be very user-
unfriendly, especially since it can be expected that the user is interested in all the
available overlay plots. The generated overlay plots can easily be customized and copied
to other programs such as MS Word and Excel.
gPROMS
When a parameter estimation run is successfully completed in gPROMS, an output file is
created containing all the available information including the option to generate overlay
plots. The machine-readable estimation file with extension *.stat-mr can be imported in
MS Excel via a pre-defined workbook that is available in the Process Systems Enterprise
directory from the start-menu. This workbook contains a macro that adds a button named
Parameter Estimation to the MS Excel toolbar and clicking on this button gives a menu
where the user can chose Import file… and Plot, which gives more options. Once the file
is imported, all the available statistical information from the parameter estimation run is
accessible on a number of spreadsheets; these will be discussed in the next paragraph.
Behind the Parameter Estimation -> Plot button, there are three options available, these
are: Overlay Chart, Residual Chart and Confidence Ellipsoids. Clicking Overlay Chart,
gives a dialog box with the options to include the standard deviations in the figures that
will be displayed and the format of these figures. The user can specify for which
variable(s) and experiment(s) the overlay plots need to be generated and also if they
should appear on the sheet with the corresponding variable, each chart on a new sheet or
all charts on a new sheet. A convenient option is to select multiple charts on a new
worksheet and click Plot all, this generates all 133 overlay plots at once. An example of
an overlay plot of the liquid mass percentage of component MBS during experiment 105,
with the measurement standard deviation included is presented in Figure 6.9.

54
Overlay Plot
EXP105
TANK.COMP_LIQ_MASS_PERC(4)
0
5
10
15
20
0 5000 10000 15000
Measurement Time
Predicted Experimental
Figure 6.9 Overlay plot of liquid mass percentage MBS in experiment 105.
The standard deviations around the measured values are indicated with error bars, which
are not clearly visible here due to the small standard deviations. The generated plots can
be edited according to all the available MS Excel features. As mentioned, also residual
plots can be generated with three options: absolute, relative and weighted. Finally, there
is the feature of generating two-dimensional confidence ellipsoids for any pair of
estimated parameters using one of the following confidence levels: 90%, 95% or 99%.
Ideally, the ellipsoids are spherical and small, indicating low cross-correlation and high
accuracy respectively.
6.4.2 Statistical analysis
After investigating the overlay plots to see if the model with the estimated parameters has
the ability to match the measured values, a statistical analysis on the estimated parameter
is performed. The minimal types of statistical information required to analyze if the
parameters are estimated with sufficient accuracy are: the estimated values, their standard
deviation or a confidence interval and the correlation matrix. In this paragraph, the
availability and type of statistical information required to perform such an analysis is
assessed for both ACM and gPROMS.
ACM
When performing an activity such as initialisation, simulation or parameter estimation,
information about this activity is created in a window at the bottom in the screen named
Simulation Messages. A right-mouse-click in this window gives a pop-up menu where
the output destination can be specified. The user choose to send the output to the screen
and also to send it directly to a log-file with the extension *.txt. This log-file contains

55
details about the optimisation iterations and at the end the statistical information is
available.
gPROMS
As mentioned in the previous paragraph, all available statistical information from a
successful parameter estimation run is stored in a *.stat-mr output file, which can be
imported in MS Excel. The workbook contains multiple spreadsheets where the statistical
information is presented in a clear way.
An overview of the available statistical information in the parameter estimation output of
both software packages is presented in Table 6.15
Table 6.15 Overview of available statistical information in parameter estimation output.
ACM gPROMS
Parameters Estimated value Yes Yes
Initial guess Yes Yes
Lower and upper bounds No Yes
Accuracy Standard deviation Yes Yes
Confidence interval Yes (95%) Yes (90%, 95% and
99%)
Student t-test No Yes (95%)
Fischer matrix No Yes
RMS error Yes No
Objective function Value Yes Yes
Residual sum Yes, total and per
variable
Yes, total
Contribution Per variable Per experiment,
per variable
Correlation Correlation matrix Yes Yes
Confidance ellipsoids No Yes
Variance Variance-covariance matrix Yes Yes
Model ranking F-values Yes Yes (90%, 95% and
99%)
Measured variables Measured values Yes Yes
Predicted values Yes Yes
Residual values Yes (absolute,
relative and
weighted)
Yes (absolute,
relative and
weighted)

56
From Table 6.15 it is concluded that the essential types of statistical information required
for analysis are present in both software packages. Furthermore, both tools have very
similar types of statistical information available, for gPROMS it is slightly more
extensive.
The student t-test in gPROMS provides an objective indication if the individual
parameter accuracy is sufficient [21]. A 95% t-value is calculated, which is the ratio of an
estimated parameter and the distance to a bound of its corresponding 95% confidence
interval. A reference 95% t-value is determined according to t(0.95, N – Np), where N is
the total number of measurements and Np is the number of parameters to be estimated,
resulting in N – Np degrees of freedom. When the 95% t-value is larger than the reference
value, the parameter accuracy is statistically significant. Without the reference value, the
user has to make an own judgment to how high the ratio should be for a parameter to be
considered statistically significant.
6.5 Assessment on parameter estimation
In this paragraph the assessment of both software packages on the various aspects of
parameter estimation is summarized. Regarding the first assessment criterion defined in
chapter 3, which is the ability and speed of obtaining the optimal values for the kinetic
parameters, it is concluded that:
• In all three cases gPROMS was able to obtain optimal values for the parameters.
With ACM the parameters were found in all cases with the different solving
methods, except for the MLL FEASOPT solving method in the third case with 20
parameters.
• In all three cases gPROMS obtained the optimal solution faster than ACM. In
ACM the LSQ NL2SOL solving method proved to be fastest.
An important aspect of parameter estimation is the individual parameter accuracy of the
solution. This is quantified in terms of the ratio between the estimated value and the
standard deviation. From the determined accuracy ratios in the three parameter estimation
cases the following conclusions are drawn:
• The results from gPROMS and the most accurate ACM solving method proved to
have sufficient accuracy ratios in all three cases. The ratios are roughly a factor 10
higher for gPROMS, indicating very good accuracy.
• The most accurate solving method in ACM proved to be LSQ NL2SOL with
sufficient accuracy, the most inaccurate is MLL NM resulting in insufficient
accuracy.

57
Output interpretation
Apart from the performance of the parameter estimation capabilities in both software
packages, the features involving the availability and interpretation of the output are
assessed. A strong aspect of gPROMS in this context is that a parameter estimation
output file with all available statistical information is created, which can be imported in
MS Excel from where overlay, residual and confidence ellipsoid plots can be generated
with predefined macro’s. In ACM there is a separation between statistical information
that can be stored in a text file and the feature of generating overlay plots. This
functionality is lost when the project is closed since the predicted values are not stored
when the project is saved. Furthermore, The overlay plots can only be generated
separately for one variable in one experiment at a time, whereas in the gPROMS output
file there is the option to generate all plots in one sheet. These and other findings are
summarized in the following conclusions:
• The standard overlay plots functionality is good in gPROMS and poor in ACM, in
gPROMS also residual and confidence ellipsoid plots can be generated.
• Individual parameter accuracy is evaluated with a t-test in gPROMS and a
warning is created in case of insufficient accuracy, no such feature is available in
ACM
• Further available statistical information is similar and sufficient for both tools, it
is slightly more extensive for gPROMS

58
7 Experiment design
7.1 Introduction
During the process of parameter estimation as described in the previous chapter it was
found that, for both the complete and the reduced reaction scheme, parameter k8 was
unobservable with the existing set of experiment data. Given the available experiment
data a reduced kinetic model was derived by replacing the parameters that were coupled
with k8 with new parameters according to
7
88
k
kkkkk i
ii
⋅=′⋅=′′ (7.1)
All the parameters ik ′′ proved to be observable now, but remain coupled to k8 and their
use is only valid in combination with that specific value for k8. It is believed from
investigating the reduced reaction scheme that it should be possible to determine k8 and
the parameters it is coupled with individually, since the parameters with which k8 is
coupled also appear separately in the rate expressions. This is explained with the reduced
reaction scheme as presented in Figure 7.1
C4
+ + H2SO4 MBS + H + (k7 and k8)
C4 + + H2O SBA + H + (k9 and k10)
Figure 7.1 Reduced reaction scheme.
As discussed in the paragraph 6.1.1, the component rate expressions are
rrr SBASOH ==42
(7.2)
rrr MBSOH −==2
(7.3)
with
][][
]][[]][[][
29427
42107298
OHkSOHk
SBASOHkkMBSOHkkHr
+
−= + (7.4)
As explained in paragraph 6.1.1, one parameter becomes unobservable as a result of
applying the Bodenstein approximation. Therefore, a new parameter is introduced
according to
7
9
9k
kk =′ (7.5)

59
Combining (7.4) and (7.5) results in
][][
]][[]][[][
2942
4210298
OHkSOH
SBASOHkMBSOHkkHr
′+
−′= + (7.6)
In principle, all three parameters in rate expression (7.6) should be individually
determinable. However, this was not the case since in the available measurement data the
following holds
][][ 2942 OHkSOH ′>> or 7
9
2
42
][
][
k
k
OH
SOH>> (7.7)
Allowing the simplification of (7.6) to
][
]][[]][[][
42
4210298
SOH
SBASOHkMBSOHkkHr
−′= + (7.8)
In the resulting rate expression k8 and 9k ′ cannot be determined individually, and the
parameter 9k ′′ was introduced for which the following holds
7
98
989k
kkkkk
⋅=′⋅=′′ (7.9)
However, if there would be more variation in the ratio of the concentration of H2SO4 and
H2O and the condition in (7.7) would not be satisfied, then both k8 and 9k ′ are expected to be individually observable.
7.2 Approach
In order to test this hypothesis, a set of kinetic parameters is arbitrarily chosen and
simulations with the model are used to synthesize experiment data. This approach
provides perfect data without measurement error and allows measurements to be taken as
frequently as desired. It is recognized that these conditions are very different from those
when performing actual experiments. In a later stadium, the simulation conditions can be
changed to resemble the actual experiments by e.g. adding constraints on the minimal
time between measurements and by adding noise to the data.
Attempts have been made to apply the gPROMS SED feature to design experiments
using the reduced scheme in Figure 7.1 such that they have maximal information content
[20]. This approach was abandoned due to the problem that the designed experiments
were either identical to the previous one after a few designs or they were very close to the
initial guess of the initial composition, which is the degree of freedom in the design. It

60
was initially suspected that these problems might be caused by the CAPE-OPEN
interface, however this was found not to be the case in subsequent trials of a model that
did not use the CAPE-OPEN interface. At the moment of writing this report, it is still
under investigation how the gPROMS SED feature can be applied successfully.
Alternatively, the experiments have been designed manually, by characterizing the design
space with ratios of the component concentrations. This was also found to be
unsuccessful and a different set of values for the kinetic parameters is chosen, with a ratio
of k9 over k7 in the order of 1 instead of 1e-4, as was the case in the previous set.
Furthermore, the number of experiments and the number of measurements was increased.
Due to the Bodenstein approximation one parameter is unobservable and k7 is fixed to its
chosen value. With these modifications, the parameters k8, k9 and k10 were observable.
Next, the reversible reaction with parameters k1 and k2 forming one of the butenes (1-C4)
is added to the reaction scheme. Again new experiments are simulated and the
measurements are used to estimate the five parameters, which also proved to be
successful. As mentioned in Chapter 4, the complete scheme was a simplification to the
original scheme. The reversible direct reaction between MBS and SBA, which was
omitted from the original scheme, is now re-introduced resulting in what will be referred
to as the semi-original scheme.
The process of performing simulations with the designed experiments and applying the
measurements for parameter estimation is repeated and the complete set of parameters
(except for k7 due to the Bodenstein approximation) was re-obtained. The procedure for
the three cases (reduced scheme, reduced scheme including 1-C4 and the triangle scheme)
is similar, although becoming more extensive with increasing number of kinetic
parameters. It is described for the triangle scheme in the following paragraph.
7.3 Triangle reaction scheme
The reaction scheme that is used in the final case is referred to as the triangle scheme. It
incorporates the reversible direct reaction between MBS and SBA from the scheme
proposed originally for this work by the chemist who designed and supervised the
experimental program. A schematic of the triangle scheme is presented in Figure 7.2.

61
C 4 ⊕
SBA
H ⊕
H 2 O
H ⊕
SBA MBS
H 2 SO 4
H 2 SO 4 H 2 O
H ⊕
C 4 ⊕
SBA
H ⊕
H 2 O
H ⊕
1 - C 4 = 1 - C 4 =
SBA MBS
H 2 SO 4
H 2 SO 4 H 2 O
H ⊕
Figure 7.2 Schematic representation of the triangle scheme
Instead of three, only one of the reversible reactions that form the butenes is included
here, since this is sufficient to capture the principle behaviour of the presence of butenes
in the reaction scheme. The triangle reaction scheme with the kinetic parameters is
presented in Figure 7.3
1-C4 + H+ C4
+ (k1 and k2)
C4+ + H2SO4 MBS + H+ (k7 and k8)
C4+ + H2O SBA + H+ (k9 and k10)
MBS + H2O SBA + H2SO4 (k15 and k16)
Figure 7.3 Triangle reaction scheme.
In Figure 7.2 it can be seen that the reactions involving k7, k8 ; k9, k10 and k15, k16 form a
reaction loop. The presence of this loop in the reaction network enables an additional
constraint to be developed which relates the chemical equilibriums of each reaction. The
equilibrium relationships of these three reversible reactions are described by (7.10) to
(7.12)
8
7
442
87]][[
]][[
k
k
CSOH
HMBSK ==
+
+
− (7.10)
10
9
42
109]][[
]][[
k
k
COH
HSBAK ==
+
+
− (7.11)

62
16
15
2
421615
]][][[
]][][[
k
k
HOHMBS
HSOHSBAK ==
+
+
− (7.12)
The above equilibrium relationships are not independent since the following holds
87
1091615
−
−− =
K
KK (7.13)
This can be used to derive the relationship that must exist between all of the reaction rates
for a well-posed problem. This relationship is found to be
7
8
10
9
16
15
k
k
k
k
k
k= (7.14)
One of the kinetic parameters in this relationship is not independent and in this work the
value of k16 is derived from Equation 7.14 as
8
7
9
101516
k
k
k
kkk = (7.15)
This brings the set of kinetic parameters for the triangle scheme to the seven as presented
in Table 7.1. Their values are chosen such that time to steady state of the reactions is in
the order of hours, to avoid very fast or very slow reactions.
Table 7.1 Chosen parameter values
Parameter Value
k1 1.5e-4
k2 2.5e-4
k7 1e-4
k8 2e-4
k9 3e-4
k10 4e-4
k15 5e-8
From the Bodenstein approximation it follows that one kinetic parameter becomes
unobservable and therefore k7 is fixed to its chosen value and not estimated. In this
synthetic case, the other parameters can be determined without having to introduce new
parameters.
Now that the model parameters are defined, the next aspect is the design of the
experiments. In this work, we considered that experiments are conducted under
isothermal and isobaric conditions. The design freedom for the experiments to be
designed is the initial composition of the five components H2O, H2SO4, SBA, MBS and 1-
C4. The design space will be characterized by introducing four ratios according to

63
][
][
42
21
SOH
OHr = (7.16)
][
][2
MBS
SBAr = (7.17)
][
][ 23
SBA
OHr = (7.18)
][
][ 424
MBS
SOHr = (7.19)
The fifth dimension of the design space is the amount of 1-C4. In every experiment three
of the five dimensions are assigned a value that can be either 1, high or low
corresponding to Table 7.2
Table 7.2 values for high and low design points
high low
ri 100 0.01
1-C4 [kg] 0.01 0
The initial composition of the set of designed experiments has the characteristics as
presented in Table 7.3
Table 7.3 Characteristics of initial composition of designed experiments
Experiment r1 r2 r3 r4 1-C4
1 high high high
2 high low high
3 low high high
4 low low high
5 high high high
6 high low high
7 low high high
8 low low high
9 1 1 1 1 high
10 high high low
11 high low low
12 low high low
13 low low low
14 high high low
15 high low low
16 low high low
17 low low low
18 1 1 1 1 low

64
The measurements during simulation of the experiments are taken very frequently,
especially in the first period of the reaction. A specification of the measurement times, 66
in total, is presented in Table 7.4
Table 7.4 Specification of measurement times
Start [s] End [s] Interval [s]
0 30 1
35 50 5
60 100 10
150 300 50
400 1000 100
1250 2000 250
2500 5000 500
6000 10000 1000
With this setup of synthesizing experiments it was found that all observable parameters
could be determined. The criterion to indicate whether the parameters are successfully
determined is chosen to be a 10% range around the original parameter value. This
criterion can off course only be applied in this synthetic case where the original
parameter values are known. In practice, the confidence interval and standard deviation
provide information to judge the accuracy of the solution. The parameter estimation
results are presented in Table 7.5
Table 7.5 parameter estimation results triangle scheme with synthesized experiments.
Correlation matrix Parameter
Optimal
estimate
Standard
deviation k1 k2 k8 k9 k10 k15
k1 1.499998E-04 4.558409E-08 1.00
k2 2.499997E-04 4.072335E-07 0.07 1.00
k8 1.999995E-04 3.360493E-07 0.01 -0.95 1.00
k9 3.000008E-04 3.541149E-07 -0.01 0.42 -0.39 1.00
k10 4.000007E-04 5.854902E-07 0.01 -0.70 0.72 0.30 1.00
k15 5.000024E-08 4.016255E-11 -0.01 0.43 -0.44 0.10 -0.40 1.00
As can be observed in Table 7.5 the parameters are estimated with sufficient accuracy
and well within a 10% range of the original values. However, a high correlation exists
between k2, k8 and k10. This indicates that these parameters did not become sufficiently
observable even from the large set of synthesized experiment data.
7.4 Constraints
The procedure described in section 7.3 represents an ideal case that would never be
encountered in practice. In actual experiment data a finite amount of measurement error
will be associated with all measurements. In addition, resource and equipment constraints

65
mean that only a small number of experiments in which a subset of the possible
experiment data points can ever be measured. Given these constraints, it is thus useful to
understand which experiments and which experiment data can provide maximal
information. In this section, the amount of measurement data is reduced to investigate
what the required minimum set of measurement points is, in order to estimate the
parameters with sufficient accuracy. Next, the effect of measurement error is investigated
by adding noise to the perfect data.
7.4.1 Reduced measurement data
The total data set of 18 experiments containing 66 measurement points each is reduced
until the parameters were no longer individually observable. This is done in various ways
for all three reaction systems (reduced scheme, reduced scheme including 1-C4 and the
triangle scheme) that are mentioned in paragraph 7.2. First the number of measurement
points per experiment is reduced, keeping the number of experiments used for estimation
at the maximum of 18. For all three reaction systems the minimum was found to be one
single measurement point, provided that it is located in the first part of the reaction,
before steady state is reached. This first part of the reaction contains most information
about the time-dependent behaviour of the system, which is required to obtain the kinetic
parameters. The steady-state part contains only information on the reaction equilibrium
constants.
Next, the number of complete experiments is reduced, using all 66 measurement points in
the remaining experiments to estimate the parameters. Finally, the number of experiments
containing one single measurement point is reduced until the parameters were no longer
individually observable. An overview of the results is presented in Table 7.6.
Table 7.6 Minimal number of experiments required to obtain parameters.
The type of experiments is also of influence, experiments with more variation in the
measured variables are found to contain more information. For the triangle scheme using
66 measurement points per experiment it was not possible to obtain the parameters with
experiments 1 and 13, although the overlay plots showed a good fit. Parameter estimation
Reaction system
Number of
measurement
points per
measured variable
Number of
measured
variables per
experiment
Minimal
number of
experiments
Total number of
measurement
points
66 4 2 528 Reduced scheme
1 4 3 12
66 5 2 660 Reduced scheme
including 1-C4 1 5 4 20
66 5 2 660 Triangle scheme
1 5 4 20

66
proved to be successful with experiments 3 and 11. Typical overlay plots of both
parameter estimation runs are presented in Figures 7.4 and 7.5.
91.4
91.5
91.6
91.7
91.8
91.9
92
0 2000 4000 6000 8000 10000
Time [s]
weig
htp
erc
enta
ge H
2O
[%
]
Predicted Experimental
Figure 7.4 Typical variation of a measured value in experiment 1
0
1
2
3
4
5
0 2000 4000 6000 8000 10000
Time [s]
Weig
htp
erc
enta
ge H
2O
[%
]
Predicted Experimental
Figure 7.5 Typical variation of a measured value in experiment 3
The low variation in the measured values as can be seen in Figure 7.4 was observed in
experiments with both ratios either high or low, as specified in Table 7.3. In the case of
experiments 9 and 18 where all four ratios have a value of 1, it was observed that little
variation occurred for components H2O and H2SO4 and much more for components SBA
and MBS. High variation was encountered in experiments with a high value for one ratio
and a low value for the other. The typical variation of a measured variable in such an
experiment, is observed in Figure 7.5.

67
This is explained by looking at the definition of the ratios in equations (7.16) to (7.19)
and the triangle reaction scheme in Figure 7.3. When r1 and r2 are both high or low, this
results in respectively low or high concentration on both sides of reactions 7, 8 and high
or low concentrations on both sides of reactions 9, 10. Also the difference in
concentration in reactions 15 and 16 is small in both cases. As the driving force for
reaction is the difference in concentration on both sides of the reaction, a small difference
results in small variation of the measured variables. In the case that r3 and r4 are both
high or low, the concentration difference for reactions 7, 8 and 9, 10 may be high, but
both reaction consume the same intermediate, which now becomes the limiting
component. Reaction 15, 16 lacks driving force due to little difference in the
concentrations on both sides of the reaction. Neither of these reaction limiting aspects
occur in the cases that a combination of two ratios has different values. This explains why
it is observed that experiments 2, 3, 6, 7, 11, 12, 15 and 16 contain more variation than
experiments 1, 4, 5, 8, 10, 13, 14 and 17.
7.4.2 Effect of measurement error
The effect of measurement error is mimicked by adding noise to the perfect data that was
obtained from the simulations. The measurement error is assumed to be normally
distributed and therefore the noise is created with a Gaussian random number generator,
which is based on the polar Box-Muller transformation [3]. The input parameters are the
mean µ and the standard deviation σ of the Gaussian random number to be generated. The
synthesized data is the value for µ and one value for σ is assigned for the complete
dataset. The approach to investigate the effect of measurement error on the ability to
obtain the parameters is to vary σ of the Gaussian noise. The case that σ = 0 is equivalent
to having no noise and returns the synthesized data point obtained from simulation. Using
the complete dataset for parameter estimation, it was found that σ = 1e-8 resulted in good
overlay plots and in parameters values within a 10% range of the original values.
However, σ = 1e-7 resulted in parameter estimates outside a 10% range of the original
values for k8, k9 and k10 and poor overlay plots. In the case of σ = 1e-6 the overlay plots
are equally poor and the parameter estimates of k2, k8, k9 and k10 are outside their 10%
range. It is regarded to be suspicious that already for σ =1e-7 the parameters cannot all be
obtained within the 10% range of their original values This leads to believe that either the
applied method of adding noise to the synthesized data is not suitable for this purpose or
that the system is indeed extremely sensitive to measurement error. It is recommended to
further investigate what the cause of these observations is. Due to lack of time this was
not possible before the moment of finalizing this report.
7.5 Conclusions on experiment design
The conclusions that are drawn from investigating the design of experiments for the three
reaction systems are the following:
• The gPROMS SED feature has not been applied and is therefore not assessed.

68
• It proved to be possible to estimate all independent parameters in the three
reaction systems using the synthesized experiment data.
• Experiments with a high and a low initial concentration ratio exhibit more
variation in the measured variable than experiments with both ratios either high or
low.
• Applying perfect synthesized measurement data allows to estimate the parameters
with very little measurements.
No conclusions can be drawn on the part of adding noise to the synthesized data. It is
recommended that this topic is further investigated.

69
8 Conclusions
The main project objective is to assess the parameter estimation capabilities of the
gPROMS software and compare them with the Aspen Custom Modeler software, using a
realistic industrial process as case study, which is the Sec-Butyl-Alcohol stripper. The
assessment criteria are divided into three parts, the conclusions with respect to these
criteria are:
Model building
• The CAPE-OPEN interface is successfully applied in gPROMS and an
experiment model has been built that is equal to the existing model in ACM.
• AspenPlus does not support all CAPE-OPEN methods when exporting a property
package.
• Experiment data input requires significantly less effort in gPROMS for data sets
with multiple measured variables per experiment.
Parameter estimation
• gPROMS showed better ability, speed and accuracy in obtaining optimal
estimates compared to ACM.
• From the four solving methods in ACM, the LSQ NL2SOL method performed
best with reasonable speed and sufficient accuracy.
• The gPROMS output file provides better features to generate overlay plots and
has additional features to create residual and confidence ellipsoid plots.
• The available statistical information is sufficient in both tools, but slightly more
extensive in gPROMS.
Experiment design
• The gPROMS SED feature has not been applied and is therefore not assessed.
• It proved to be possible to estimate all independent parameters in three reaction
systems using synthesized experiment data.
• Experiments with one high and one low initial concentration ratio exhibit more
variation in the measured variables than experiments with both ratios either high
or low.

70
References [1] AspenTech, “Introduction to Aspen Custom Modeler”, 2002
[2] Bard, Y., Nonlinear Parameter Estimation, 1974
[3] Box, G.E.P., Muller, M.E., A note on the generation of random normal deviates,
Annals Math. Stat, V. 29 : 610-611, 1958
[4] Chewter, L.A., Colantonio, M.C., McBrien, J., Mooijer-van den Heuvel, M., de
Noord, O.E., Pingen, J., de Wolf, S., Weve, D.N.M.M., User guide to the
modelling of chemical processes, CT.04.20611 (Confidential), 2004
[5] Damen, A.A.H., Physiological Processes and Parameter Estimation, TUE reader,
2003
[6] Dennis, J.E., Gay, D.M., Welsch, R.E., An adaptive Nonlinear Least Squares
Algorithm. ACM Transactions on Mathematical Software, 7 : 348-383, 1981
[7] During, F., de Jong, J., Jonkers, G., Pernis COF/2 Strippers Performance Study –
Data Report., Shell International Chemicals B.V., CT.04.20655 (Confidential),
2004
[8] Eurokin, URL: http://www.dct.tudelft.nl/eurokin , 2005
[9] Fogler, Scott H., Elements of Chemical Reaction Engineering (Third Edition),
2002
[10] Harwell subroutine library, URL: http://www.cse.clrc.ac.uk/nag/hsl , 2005
[11] Helfferich, F.G., Kinetics of homogenous multistep reactions, 2001
[12] Hendriks, E.M., Mooijer, M.M., Meijer, H., Engineering data and
thermodynamics, Shell course “Thermodynamics for Distillation”, 2004
[13] Himmelblau, D.M., Applied Nonlinear Programming, 1972
[14] Koplos, G.J., French, R.N., Development of a Kinetic Model for the Shell Acid-
Olefin Process Employed for the Manufacture of Sec-Butyl Alcohol – Part 3,
Shell Global Solutions (U.S.), OG.03.80039 (Confidential), 2003
[15] Loos, T.W.d. & Kooi, H.J.v.d., Toegepaste thermodynamica en fasenleer, TUD
reader, 1977

71
[16] Muthusamy, D., Development of a Kinetic Model for the Shell Acid-Olefin
Process Employed for the Manufacture of Sec-Butyl Alcohol – Part 1, Shell Oil
Company, Technical Progress Report WTC 54-02 (Confidential), 2002
[17] Nelder, J.A., Mead, R., A simplex method for function minimization. Computer
Journal, 7 : 308-313, 1965
[18] Perkins, G., Progress report: Parameter estimation of the reaction kinetics of the
SBA stripper, 2004
[19] Piñol, D. (AspenTech), Halloran, M. (AspenTech Ltd.), Szczepanski, R.
(Infochem), Pons, M. (TotalFinaElf), Drewitz, W. (BASF), Banks, P. (BP),
CAPE-OPEN Open Interface Specifications, Thermodynamics and Physical
Properties Version 1.1, 2003
[20] Process Systems Enterprise, Experiment Design for Parameter Precision in
gPROMS, 2004
[21] Process Systems Enterprise, gPROMS Advanced User Guide, 2004
[22] Process Systems Enterprise, gPROMS Introductory User Guide, 2004
[23] Reman, W.G., The Sec-Butyl Alcohol / Methyl Ethyl Ketone Process., Shell
International Chemicals B.V., AMGR.96.212 (Confidential), 1996
[24] Rogers, A.N., Development of a Kinetic Model for the Shell Acid-Olefin Process
Employed for the Manufacture of Sec-Butyl Alcohol – Part 2, Shell International
Chemicals B.V., CA.02.20793 (Confidential), 2003
[25] Spiering, W., Muthusamy, D., Rogers, A.N., Shell Acid-Olefin Process for
SBA/MEK Modelling Plant Behaviour, CT.03.20656 (Confidential), 2003
[26] Walas, Stanley M., Phase Equilibria in chemical engineering, 1984
72
Nomenclature
symbol quantity units
a activity [-]
a order of concentration [-]
A correlation parameter various
B correlation parameter various
C correlation parameter various
C concentration [mole · m3]
D correlation parameter various
E correlation parameter various
Ea activation energy [J · mole-1]
f fugacity [Pa]
F correlation parameter various
H0 Hammett acidity [-]
k reaction rate constant [s-1]
kp pre-exponential factor [s-1]
kref referrence pre-exponential factor [s-1]
L( ) likelihood [-]
n molar holdup [mole]
N number of components [-]
N number of measurements [-]
Np number of parameters [-]
NE number of experiments [-]
NM number of measurements [-]
NV number of measured variables [-]
p( ) probability [-]
P pressure [Pa]
fΡ Pointing factor [-]
Pi partial pressure [Pa]
P sat
saturation pressure (vapour pressure) [Pa]
r reaction rate [mole · s-1]
R number of reactions [-]
R universal gas constant (≈8.3145) [J · mole-1 · K
-1]
t time [s]
T temperature [K] or [°C]
V volume [m3]
W weighting factor [-]
w% weight percentage [%]
x liquid mole fraction [-]

73
y vapour mole fraction [-]
z predicted model response [-]
z~ measured response [-]
Greek
ε absolute tolerance [-] γ activity coefficient [-] γ heteroscedasticity parameter [-]
φ fugacity coefficient [-]
µ chemical potential [J] µ mean [-]
υ stoichiometric factor [-]
nυ molar specific volume [m3 · mole
-1]
θ set of model parameters [-]
ξ measurement error [-]
π pi constant (≈3.1416) [-]
σ standard deviation [-]
Φ gPROMS objective function value [-]
ω heteroscedasticity parameter, standard deviation [-]
superscripts
+ protonated
0 reference state
sat saturated
´ unobservable parameter due to Bodenstein approximation.
´´ unobservable parameter in combination with available data.
subscripts
L liquid
L lower
U upper
V vapour
T total

74
indices
0 reference state (P = P sat)
i ith component
j jth reaction
k kth measurement
abbreviations
ACM Aspen Custom Modeler
CAPE Computer Aided Process Engineering
CO CAPE-OPEN
COSE CAPE-OPEN compliant Simulation Environment
CPU Central Processing Unit
CSTR Continuous Stirred Tank Reactor
FatnessDBI Fatness Dissolved Butenes Included
FO Foreign Object
GB Giga Byte
gPROMS general Process Modelling System
HCFA HydroCarbon Free Acid
LSQ Least Squares
MEK Methyl Ethyl Ketone
MLL Maximal log likelihood
NM Nelder-Mead
NRTL Non-Random Two Liquids
PP Property Package
PS Property System
PSE Process Systems Enterprise
RAM Random Access Memory
SBA Secondary-Butyl Alcohol
SED Sequential Experiment Design
SQP Sequential Quadratic Programming
VLE Vapour-Liquid Equilibrium

75
Appendix A Chemical structures of components
H H
O
H2O H2SO4
O
O
HO OH S CH2
CH
CH3
CH3
OH
SBA
MBS
CH2
CH
CH3
CH3
O
O
O OH S
CH2
CH +
CH3
CH3
C4+
SBE
CH2
CH
CH3
CH3
O
CH3
CH2
CH
CH3
H +
H +
N2
N
N
1-C4
H
C
CH2
H
H CH3
C
c2-C4
H
C
CH3
H
C
CH3
t2-C4
H
C
CH3 H
C
CH3

76
Appendix B Hammett acidity
In reactions involving the protonation of a weak base (butylenes in this case) by a strong
acid such as the 72% sulphuric acid used in the SBA process, the catalytic efficiency of
the acid is not a linear function of the acid concentration present in the reaction medium.
A measure of the ability of the acid to donate a proton to a weak base is given by the
Hammett acidity function. Experiments have been performed to obtain a correlation for
the Hammett acidity H0 as a function of two other variables: HCFA and FatnessDBI. The
Hammett acidity correlation is presented in equation (B.1).
2438
0 1071408.41035172.3 HCFAHCFAH ⋅⋅+⋅⋅=− −− 312 107997.31023125.5 FatnessDBIHCFA ⋅⋅−⋅⋅+ −− (B.1)
42162.06003.377132.1 2 −⋅−⋅+ FatnessDBIFatnessDBI
The variables ‘hydrocarbon free acid’ (HCFA) and the ‘Fatness dissolved butenes
included’ (FatnessDBI) are both a function of the liquid weight percentage of some of the
components as presented in (B.2) and (B.3) respectively. HCFA (Hydrocarbon-Free
Acidity) is a measure for the capability of the liquid to absorb hydrocarbons. The
mathematical expression for HCFA is
%100
213.1330
015.18%
123.74
015.18%%
182.154
074.98%%
182.154
074.98%%
,,,,4,
,4,
22
2
SBELSBALOHLMBSLSOHL
MBSLSOHL
wwwww
ww
HCFA
++++
+=
(B.2)
FatnessDBI is defined as the number of moles of C4 equivalents, including the dissolved
butane and butene isomers, per mole of H2SO4 equivalent present in the acid phase. The
mathematical expression for FatnessDBI is
182.154
%
074.98
%231.130
%2
123.74
%
108.56
%%%
182.154
%
,4,
,,2,2,1,,
2
444
MBSLSOHL
SBELSBALCtLCcLCLMBSL
ww
wwwwww
FatnessDBI
+
++++
+=
−−−
(B.3)

77
Samenvatting
De kinitiek parameters behorend bij het relevante reactieschema zijn vereist om een
chemische proces te optimaliseren dat plaatsvindt in de Sec-Butyl-Alcohol stripper die
bedreven wordt door Shell in Pernis. Hiervoor zijn in het verleden
laboratoriumexperimenten uitgevoerd, die gemodelleerd zijn met Aspen Custom Modeler
(ACM), een commercieel software pakket dat ontwikkeld wordt door AspenTech. Het
doel van dit afstudeerproject is de parameterschatting capaciteiten het softwarepakket
gPROMS, dat ontwikkeld wordt door Process Systems Enterprise, te beoordelen en te
vergelijken met die van ACM. Hiertoe dient een model van de laboratoriumexperimenten
ontwikkeld te worden met de gPROMS software dat zo equivalent mogelijk dient te zijn
aan het bestaande model in ACM. Daartoe zijn de fysische en thermodynamische
eigenschappen van de componenten in het ACM model beschikbaar gemaakt voor het
gPROMS model via de CAPE-OPEN interface, die succesvol toegepast is. Het model van
de experimenten dat ontwikkeld is in gPROMS bevat een vloeistof-damp evenwicht dat
de verdeling van negen componenten over beide fasen beschrijft die zeer goed
overeenkomt met het ACM model. Tijdens parameterschatten werd duidelijk dat niet alle
kinitiek parameters individueel waarneembaar zijn in combinatie met de beschikbare data
van de laboratoriumexperimenten. Het systeem is gedeeltelijk ge-herparameteriseerd en
de nieuwe set parameters is vervolgens bepaald met voldoende nauwkeurigheid.
Verschillende aspecten van parameterschatten met beide software pakketten zijn
behandeld, onder andere: invoer van experiment data, interpretatie van de uitvoer,
beschikbare combinaties van doelfuncties en optimalisatie methoden alsmede het
vermogen, de snelheid en de nauwkeurigheid van het verkrijgen van een oplossing van
deze combinaties. Aan de hand van de beoordeling van deze aspecten is geconcludeerd
dat de parameterschatting capaciteiten van gPROMS beter zijn dan die van ACM.
Vervolgens is onderzocht welk type experimenten vereist zijn om de kinetiek parameters
te schatten die niet waarneembaar zijn met de tot dan toe beschikbare data. Pogingen om
de gPROMS “Sequential Experiment Design” (SED) functionaliteit toe te passen waren
zonder succes, waardoor geen uitspraak gedaan kan worden over de toegevoegde waarde
van deze functionaliteit. Alternatief ontworpen experimenten zijn gesimuleerd met het
model dat bekende parameters bevat, vervolgens wordt de synthetische data gebruikt
voor het schatten van de parameters. Het effect van datareductie op de waarneembaarheid
van de parameters is tevens onderzocht. Er is gebleken dat het mogelijk is alle parameters
te schatten van drie reactie systemen met een gereduceerde set synthetische data.