
Campus Network Structured Cabling. We all have some ugly wiring.

Cranes
AP10: Cabling and Wiring Guidelines SINAMICS
Product Information
11/2012
Foreword
Introduction 1
Selection of load side components
2
Sizing of cable cross section 3
Power cable selection 4
Installation of control cables 5
Busbar connections (including cable connection)
6
Appendix A

Legal information Warning notice system
This manual contains notices you have to observe in order to ensure your personal safety, as well as to prevent damage to property. The notices referring to your personal safety are highlighted in the manual by a safety alert symbol, notices referring only to property damage have no safety alert symbol. These notices shown below are graded according to the degree of danger.
! DANGER indicates that death or severe personal injury will result if proper precautions are not taken.
! WARNING indicates that death or severe personal injury may result if proper precautions are not taken.
! CAUTION with a safety alert symbol, indicates that minor personal injury can result if proper precautions are not taken.
CAUTION without a safety alert symbol, indicates that property damage can result if proper precautions are not taken.
NOTICE indicates that an unintended result or situation can occur if the relevant information is not taken into account.
If more than one degree of danger is present, the warning notice representing the highest degree of danger will be used. A notice warning of injury to persons with a safety alert symbol may also include a warning relating to property damage.
Qualified Personnel The product/system described in this documentation may be operated only by personnel qualified for the specific task in accordance with the relevant documentation, in particular its warning notices and safety instructions. Qualified personnel are those who, based on their training and experience, are capable of identifying risks and avoiding potential hazards when working with these products/systems.
Proper use of Siemens products Note the following:
! WARNING Siemens products may only be used for the applications described in the catalog and in the relevant technical documentation. If products and components from other manufacturers are used, these must be recommended or approved by Siemens. Proper transport, storage, installation, assembly, commissioning, operation and maintenance are required to ensure that the products operate safely and without any problems. The permissible ambient conditions must be complied with. The information in the relevant documentation must be observed.
Trademarks All names identified by ® are registered trademarks of Siemens AG. The remaining trademarks in this publication may be trademarks whose use by third parties for their own purposes could violate the rights of the owner.
Disclaimer of Liability We have reviewed the contents of this publication to ensure consistency with the hardware and software described. Since variance cannot be precluded entirely, we cannot guarantee full consistency. However, the information in this publication is reviewed regularly and any necessary corrections are included in subsequent editions.
Siemens AG Industry Sector Postfach 48 48 90026 NÜRNBERG GERMANY
11/2012
Copyright © Siemens AG 2012. Technical data subject to change

APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 3
Foreword
General Notes
Note
The standard applications are not binding and do not claim to be complete regarding the circuits shown, equipping and any eventuality. The standard applications do not represent customer-specific solutions. They are only intended to provide support for typical applications. You are responsible in ensuring that the described products are correctly used. These standard applications do not relieve you of the responsibility in safely and professionally using, installing, operating and servicing equipment. When using these standard applications, you recognize that we cannot be made liable for any damage/claims beyond the liability clause described. We reserve the right to make changes to these standard applications at any time without prior notice. If there are any deviations between the recommendations provided in these standard applications and other Siemens publications – e. g. catalogs – then the contents of the other documents have priority.
Guarantee, Liability and Support
If the application is provided free of charge the following shall apply: We shall not be liable for the information contained in this document.
Any and all further rights and remedies against Siemens AG for whatsoever legal reason, shall be excluded; this shall refer in particular to claims for loss of production, loss of use, loss of orders or profit and other direct, indirect or consequential damage.
The aforesaid shall not apply if liability is mandatory, e. g. in accordance with the Product Liability Act, in cases of intent, gross negligence by directors and officers of Siemens AG or in the case of willful hiding of a defect.
These limitations of liability shall also apply for the benefit of the Siemens AG's subcontractors, suppliers, agents, directors, officers and employees.
This Contract shall be subject to German law if customer’s place of business is in Germany.
If customer’s place of business is outside of Germany the Contract shall be subject to Swiss law. The application of the UN Convention on Contracts for the International Sale of Goods (CISG) shall be excluded.
If the application is provided in return for payment the alternative shall apply which fits the respective business case:

Introduction
APxx: Cabling and Wiring Guidelines SINAMICS
4 Product Information, 11/20112
Alternative 1: (internal business)
If not explicitly stated otherwise below, the "Terms and Conditions for Deliveries and Services for Siemens Internal Transactions", valid at the time of sale, are applicable.
Alternative 2: (domestic business of Siemens AG)
If not explicitly stated otherwise below, the "General License Conditions for Software Products for Automation and Drives for Customers with a Seat or registered Office in Germany", valid at the time of sale, are applicable.
Alternative 3: (direct export business of Siemens AG)
If not explicitly stated otherwise below, the "General License Conditions for Software Products for Automation and Drives for Customers with a Seat or Registered Office outside of Germany", valid at the time of sale, are applicable.
It is not permissible to transfer or copy these standard applications or excerpts of them in unmodified form without first having prior explicit authorization from Siemens Industry Sector in writing.
Export Procedure Indicator
AL: N
ECCN: N
Background Siemens supplies electrical components such as SIMATIC S7 programmable logic controllers, SINAMICS frequency converters, SINAMICS infeed and regenerative units and induction motors as components for installation on cranes in the harbour and other industries. Safe and reliable performance of the electrical components without disturbance or premature failure of electronic components depends on adequate installation and wiring practices. The following chapters describe in detail cabling recommendations by Siemens.
Particularly noteworthy are aspects covered in the international standard IEC 60204-32 providing requirements and recommendations relating to the electrical equipment of hoisting machines so as to promote safety of persons and property, consistency of control response and ease of maintenance.
IEC 60204-32 Safety of machinery – Electrical equipment of machines –
Part 32: Requirements for hoisting machines
EN 954-1 Safety of machinery – Safety-related parts of control systems - Part 1: General principles for design
DIN VDE 0660 Part 12 – Protective conductor terminals EN 55011 Limits and methods of measurement of radio disturbance
characteristics of industrial, scientific and medical (ISM) radio-frequency equipment
EN 61800-3 EMC product standard including special test methods for electric drive units

Introduction
APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 5
89/336/EWG COUNCIL DIRECTIVE of 3 May 1989 on the approximation of the laws of the Member States relating to electromagnetic compatibility
73/23/EWG Council Directive of 19 February 1973 on the harmonization of the laws of Member States relating to electrical equipment designed for use within certain voltage limits
6SE7087-6QX60 Masterdrives Compendium Vector Control 1998 6SE7087-6CX87-8CE0 Installation Instructions for EMC Correct Installation of
Drives Prysmian (Pirelli) catalog BU IS 2.1 × 2000
Flexible Electric Cables
SINAMICS catalogue D21.3 SINAMICS S120 chassis / cabinet modules SINAMICS Engineering Manual SINAMICS G130, G150, S120 Chassis, S120 Cabinet
Modules, S150 IEEE Transactions on Industrial Applications (Vol. 42, No. 4 July/August 2006)
Article by Annette Muetze and Andreas Binder
The implementation of these recommendations is no substitute for a risk assessment of the crane which needs to be made by the crane builder.

Introduction
APxx: Cabling and Wiring Guidelines SINAMICS
6 Product Information, 11/20112
Table of contents
1 Introduction .................................................................................................................................. 7 1.1 High frequency disturbance ...................................................................................................... 7 1.2 Long motor cables .................................................................................................................... 8 1.3 Common-mode oscillation .......................................................................................................12 1.4 Bearing current .......................................................................................................................13
2 Selection of load side components ................................................................................................ 15 2.1 Maximum cable length, no output reactor ................................................................................15 2.2 Maximum cable length and output reactor ...............................................................................16 2.2.1 Voltage-limiting du/dt filters......................................................................................................17 2.2.2 Sine filters ...............................................................................................................................20
3 Sizing of cable cross section ........................................................................................................ 22 3.1 Conductors .............................................................................................................................22 3.2 Protective conductor................................................................................................................23
4 Power cable selection .................................................................................................................. 25 4.1 Types of power cable ..............................................................................................................25 4.2 Insulation material used for power cables ................................................................................26 4.3 Power cables recommended by Siemens ................................................................................26 4.4 Installation guidelines ..............................................................................................................28 4.4.1 Grounding and high-frequency equipotential bonding ..............................................................29 4.4.2 Wiring guidelines in accordance to EMC rules .........................................................................31 4.4.3 Digital signals / encoder ..........................................................................................................34 4.4.4 EMC-compliant cable routing on the plant side on cable racks and in cable ducts ....................36 4.4.5 Wiring requirements as per IEC 60204-32 ...............................................................................38 4.4.6 Wiring practices to be avoided .................................................................................................41 4.4.7 Best practices for screened power cable termination ...............................................................43
5 Installation of control cables ......................................................................................................... 49 5.1 Installation of PROFIBUS cables .............................................................................................49 5.2 Installation of encoder cables ..................................................................................................51
6 Busbar connections (including cable connection) ............................................................................ 57 A.1 Contact ...................................................................................................................................59

Introduction
APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 7
Introduction 1
Variable speed drives have become an integral component of the electrical control system for cranes. The installation of variable speed drives on cranes with increasing rated load and crane size has become a technical challenge. The following recommendations are meant to help the crane builder in carrying out the electrical installation and cabling in a way that latest aspects of variable speed drives parasitic effects are covered.
1.1 High frequency disturbance Variable-speed drives have advantages and disadvantages. One of the disadvantages is the high switching frequency of the semiconductor (IGBT) which can cause disturbances to other components.
Sinamics frequency converters (motor modules) operate with a voltage-source DC link. In order to keep the power losses as low as possible the inverter switches the DC link voltage to the motor winding in the form of voltage blocks. A reasonably sinusoidal current flows into the motor.
Figure 1-1 Block diagram of a PWM converter with voltage-source DC link

Introduction 1.2 Long motor cables
APxx: Cabling and Wiring Guidelines SINAMICS
8 Product Information, 11/20112
The described mode of operation in conjunction with high-performance semiconductor switching elements has made it possible to develop compact frequency converters which now play a vital role in drive technology.
However, due to the fast switching a pulse-type noise current flows to ground through parasitic capacitances CP at each switching edge. Parasitic capacitances exist between the motor cable and ground and also within the motor.
Figure 1-2 Block diagram showing output voltage V and fault current Is
The source of the earth current IS is the inverter, thus this earth current must also flow back to the inverter. Impedance ZN and ground impedance ZE act in the return flow path. Impedance ZN forms parasitic capacitances between the supply cable and ground which is connected in parallel with the impedance (between phase and ground) of the supply transformer. The noise current itself and the voltage drops across ZN and ZE caused by the noise current can also affect other electrical units. Therefore, variable-speed drives generate high-frequency noise currents.
EMC stands for "Electromagnetic Compatibility" and, in accordance with the EMC Law §2(7), it defines "the capability of a unit to operate satisfactorily in an electromagnetic environment, without itself causing electromagnetic disturbances which would be unacceptable for other electrical units in this environment".
1.2 Long motor cables Effect of crane mechanical configurations on the length of the electrical cables of a Ship-to-Shore (STS) type of crane:

Introduction 1.2 Long motor cables
APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 9
Machinery on trolley (MOT)
Positive:
Shorter wire-ropes for hoist
No wire-ropes for trolley
Negative:
Long electrical cables for hoist motors
Long electrical cables for trolley motors
Space constraints for hoist motors
Self-propelled trolley (SPT)
Positive
No wire-ropes for trolley
Negative
Long electrical cables for trolley motors

Introduction 1.2 Long motor cables
APxx: Cabling and Wiring Guidelines SINAMICS
10 Product Information, 11/20112
Rope-towed trolley (RTT)
Positive:
Shorter cables to hoist and trolley motors
Negative:
Long wire-ropes for hoist and trolley
Typical Gantry configuration
Negative:
Accumulated long motor cables
From all the examples above the gantry motion has the longest motor cable. A typical STS crane with the inverters mounted in the machinery house on the girder has accumulated gantry motor cable lengths reaching almost 1000 m.
The industrial cranes have a large variety of designs in terms of the mechanical or electrical aspects. Siemens has so far identified the following 7 types of application industries for cranes:

Introduction 1.2 Long motor cables
APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 11
1. Cranes for metallurgical plants
2. Steel mill cranes
3. Installation and workshop cranes
4. Warehouse cranes
5. Shipyard cranes
6. Power house cranes
7. Other process cranes
Figure 1-3 Some examples of industrial cranes
However, most of the industrial cranes mentioned above can be classified as STS cranes. With this classification it can be further analyzed that two types of power cable routing methods are used:
Festoon types
E-Chain types
E-chain types (although often not preferred by terminal operators for Harbour cranes) are usually used in long travel applications via integrated gliding mounts or shoes that are made from low wear polymers and plastics.

Introduction 1.3 Common-mode oscillation
APxx: Cabling and Wiring Guidelines SINAMICS
12 Product Information, 11/20112
1.3 Common-mode oscillation On large cranes with long motor feeder cables (e. g. SPT and MOT configurations) in combination with pulsed line-side converters, a common-mode oscillation may occur that could lead to excessive phase-to-ground voltage stress on the motors.
Figure 1-4 Principal circuit for common-mode oscillation
Engineering of the drive system has to consider carefully the entire drive train, comprising
the medium voltage transformer
the drive system with line-side converters and inverters on the common DC bus
the motor with the insulation class
the cabling between the different components

Introduction 1.4 Bearing current
APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 13
1.4 Bearing current Asymmetrical characteristics of the motor feeder cable in conjunction with the PWM switching pattern of the inverter leads to building up voltage between the rotor and the stator of the motor. If this voltage exceeds a certain threshold value the grease film lubricating the bearing will collapse and bring about a metal-metal contact. This leads to premature bearing failures.
Figure 1-5 Types of bearing current in a typical crane system
The figure above shows the fundamental bearing currents which can lead to premature bearing failures and also possible encoder failures (depending on the insulation of the encoder from the bearing). In the following you find a brief description of the various bearing currents shown above:
Circular current
High frequency leakage current flows between winding and housing and thus to ground which induces a high frequency shaft voltage (VShaft). Current flows from shaft to housing in one bearing and from housing back to shaft in the other bearing.
Electrostatic Discharge Machining (EDM) current
Phase-to-ground voltage (or referred to as "common mode voltage") charges the bearing capacitance. When the lubricating film on the bearing breaks down due to a high VBearing values the bearing capacitance and capacitance between winding and rotor discharges causing a high current pulse referred to as EDM.
Rotor shaft current
When the housing of the motor is badly grounded for the purpose of high frequency currents, this causes the leakage current (due to capacitance between winding and housing) to encounter a high resistance between housing and grounded systems across. If the gearbox / driven machine of the motor is grounded more effectively then the leakage current flows in this path and can further cause damages on the gearbox or driven machine bearings apart from the motor bearings.

Introduction 1.4 Bearing current
APxx: Cabling and Wiring Guidelines SINAMICS
14 Product Information, 11/20112
As a conclusion, all motor feeder cables have to be screened and of symmetric design. Proper/effective grounding for the motor is to be ensured for the purpose of high frequency currents to avoid premature bearing damages. Bearing damage may be viewed as insignificant cost to other potential failures but it is nevertheless time consuming (especially for Hoist motors) contributes to crane down time leading to huge losses at the expense of terminal operators.

APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 15
Selection of load side components 2
The objective of the following chapters is to give a clear instruction on
How to select the correct load-side components
How to select suitable cable and type.
How to implement correct wiring practices.
– Dimensioning of cable cross section
– Installation of power cables
– Installation of control cables
The purpose of output reactors is to limit capacitive recharging currents into the capacitance of the motor feeder cable so as to protect the IGBTs in the drive.
The selection of output reactors depends on the following parameters:
Type of cables used (screened or unscreened; refer to table in the following chapter)
Number of motors supplied from a converter
When a converter/inverter supplies several motors (group drive) the capacitive charge / discharge currents of the motor cables are added. The total cable length is the sum of the cable lengths for the individual motors.
2.1 Maximum cable length, no output reactor The market of cables supplies a variety of applications and defines a myriad of criteria. However, cables can be categorized according to the following characteristics:
Electrical (which will be looked at further in detail)
Thermal
Mechanical
Chemical
Electromagnetic capability
Others (e. g. fire resistance etc.)
This guideline will look into the selection of cable lengths in terms of cable capacitance and the remaining characteristics of the cables as mentioned above would be in favour of the crane builder/customer.
The maximum cable lengths which can be connected to the Sinamics Motor Modules unit without reactors are specified in the following table.

Selection of load side components 2.2 Maximum cable length and output reactor
APxx: Cabling and Wiring Guidelines SINAMICS
16 Product Information, 11/20112
Table 2- 1 Motor cable length without output reactor Sinamics G130, G150, S150, S120 (Chassis / Cabinet Modules)
Rated voltage Non-shielded cables (e.g. Protodur NYY)
Shielded Cables (e.g. Protodur NYCWY)
3AC 380 V - 480 V 450 m 300 m 3AC 500 V – 600 V 450 m 300 m 3AC 660 V - 690 V 450 m 300 m
2.2 Maximum cable length and output reactor Whenever there are long power cables they should be dimensioned according to the following table.
Table 2- 2 Motor cable length when using output reactors (Sinamics G130 / G150)
Number of reactors in series 1 2 1 2 Rated Voltage Reactor Reactor
Non-shielded cables Shielded cables2) 3AC 380 V to 480 V 450 m 675 m 300 m 450 m 3AC 500 V to 600 V 450 m 675 m 300 m 450 m 3AC 660 V to 690 V 450 m 675 m 300 m 1) 450 m 1)
Table 2- 2.1 Motor cable length when using output reactors (Sinamics S120 / S150)
Number of reactors in series 1 2 1 2 Rated Voltage Reactor Reactor
Non-shielded cables Shielded cables2) 3AC 380 V to 480 V 450 m 787 m 300 m 525 m 3AC 500 V to 600 V 450 m 787 m 300 m 525 m 3AC 660 V to 690 V 450 m 787 m 300 m 525 m
1) For using Sinamics G150 (1750kW up to 2700kW) in parallel a maximum cable length of 525m (non-shielded cables) and 787m (shielded cables)
2) The effective capacitance per unit length of the PROTOFLEX EMC cable corresponds to that of an unshielded cable. With the PROTOFLEX EMC cable, the same motor cable lengths are therefore possible as with an unshielded cable.

Selection of load side components 2.2 Maximum cable length and output reactor
APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 17
2.2.1 Voltage-limiting du/dt filters Voltage limiting filters (output du/dt filters) should be used for motors if the voltage strength of the insulation system is not known or is inadequate.
The du/dt filters limit the voltage rate-of-rise and the typical voltage spikes for the rated supply voltage to the following values:
du/dt-Filter plus VPL
voltage rate-of-rise <500V/µs
< 1000 V at Vsupply 575 V
< 1250 V at 660 V Vsupply 690 V
du/dt-Filter compact plus VPL
voltage rate-of-rise <1600V/µs
< 1150 V at Vsupply 575 V
< 1400 V at 660 V Vsupply 690 V
Note
The maximum cable length between the motor module and the du/dt filter is limited to 5m.
The maximum motor cable length can be dimensioned according to the following tables.
Table 2- 3 Motor cable length when using du/dt filter plus VPL
Maximum motor cable length Rated Voltage Shielded cables Non-Shielded cables
e.g. Protodur NYCWY e.g. Protodur NYY 3AC 380 V to 480 V 300 m 450 m 3AC 500 V to 600 V 300 m 450 m 3AC 660 V to 690 V 300 m 450 m
Table 2- 4 Motor cable length when using du/dt filter compact plus VPL
Maximum motor cable length Rated Voltage Shielded cables Non-Shielded cables
e.g. Protodur NYCWY e.g. Protodur NYY 3AC 380 V to 480 V 100 m 150 m 3AC 500 V to 600 V 100 m 150 m 3AC 660 V to 690 V 100 m 150 m

Selection of load side components 2.2 Maximum cable length and output reactor
APxx: Cabling and Wiring Guidelines SINAMICS
18 Product Information, 11/20112
Note
The total cable length is the sum of the cable lengths connected to the individual motors. From a motor current of 120 A, single-motor drives can also be supplied with parallel cables (up to the maximum permissible cable length) in case of standard units.
Note
The voltage limiting filters can be used up to a maximum output frequency of 150 Hz.
The permanent minimum output frequency can be 0Hz with a du/dt-Filter plus VPL and
10Hz with a du/dt-Filter compact plus VPL ( <10Hz for maximum 5min)
Note
The du/dt filters can only be used with a motor connected.
Note The maximum pulse frequency is limited to the double of the factory settings. Factory setting 2kHz => maximum 4kHz Factory setting 1,25kHz => maximum 2,5kHz

Selection of load side components 2.2 Maximum cable length and output reactor
APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 19
The following principal diagram shows the voltage values at the motor output terminals of the motor module and the voltage values at the motor connection terminals.
Figure 2-1 Arrangement of output reactor and dV/dt filter

Selection of load side components 2.2 Maximum cable length and output reactor
APxx: Cabling and Wiring Guidelines SINAMICS
20 Product Information, 11/20112
2.2.2 Sine filters Sine filters ensure that motor voltage and motor current are almost sinusoidal.
The peak voltage and the critical rate of rise of off-state voltage are limited by the filter.
critical rate of rise of off-state voltage du/dt << 50V/µs
peak voltage < 1.1 * 2 * Usupply
The sine filters for supply voltages of 380 V to 480 V are designed for a pulse frequency of 4 kHz (2.5kHz at 3AC500V - 600V)
The maximum output frequency is limited to 150Hz.
NOTICE
The maximum cable length between the motor module and the sine filter is limited to 5m.
NOTICE
Note the current derating for chassis units as a result of the 4 kHz (2,5kHz) pulse frequency!
ATTENTION
The sine filters can only be used with a motor connected!
Sine filters are suitable for supplying Ex (d) motors. They limit the voltage stressing in the motor terminal boxes to a value like a direct driven motor.
The sine filters are able to run in earthed power supplies (TN/TT) and in unearthed power supplies (IT).
For possible cable lengths see the following table.
Table 2- 5 Motor cable length with sine filter (for Sinamics G130, G150, S150, S120)
Supply voltage Maximum motor cable length Shielded cables
(e.g. Protodur NYCWY) Non-shielded cables (e.g. Protodur NYY)
3AC 380 – 480 V 300 m 450 m 3AC 500 – 600 V 300 m 450 m

Selection of load side components 2.2 Maximum cable length and output reactor
APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 21
Because of the increased pulse frequency (4kHz at 380-480V and 2.5kHz at 500-600V) the maximum output power is reduced. The following table shows the maximum output power with and without a sine filter.
Supply voltage Output power Nominal output current
Current-Derating-Factor
Output current
without sine filter without sine filter with sine filter with sine filter
3AC 380V – 480V 110 kW 210 A 82% 172 A
3AC 380V – 480V 132 kW 260 A 83% 216 A
3AC 380V – 480V 160 kW 310 A 88% 273 A
3AC 380V – 480V 200 kW 380 A 87% 331 A
3AC 380V – 480V 250 kW 490 A 78% 382 A
3AC 500V – 600V 110 kW 175 A 87% 152 A
3AC 500V – 600V 132 kW 215 A 87% 187 A

Sizing of cable cross section
APxx: Cabling and Wiring Guidelines SINAMICS
22 Product Information, 11/20112
Sizing of cable cross section 3 3.1 Conductors
For information on the recommended cross-sectional area of the conductors for incoming and outgoing cables of every size: refer to the respective operating instructions of SINAMICS components.
With symmetrical, 3-wire, three-phase cables, the summed ampere-turns over the cable outer diameter are equal to zero and they can be routed in conductive, metal cable ducts or racks without any significant currents (ground current or leakage current) being induced in these conductive, metal connections. The danger of induced leakage currents and thus of increased cable-shield losses increases with single-wire cables.
Copper cable Aluminum
Cross-section of 3-wire-cable
[mm2]
Single routing
[A]
Groups of cables routed in parallel 1)
[A]
Single routing
[A]
Groups of cables routed in parallel 1)
[A]
3 x 2.5 22 17 17 13
3 x 4.0 30 23 23 18
3 x 6.0 37 29 29 22
3 x 10 52 41 40 31
3 x 16 70 54 53 41
3 x 25 88 69 68 53
3 x 35 110 86 84 65
3 x 50 133 104 102 79
3 x 70 171 133 131 102
3 x 95 207 162 159 124
3 x 120 240 187 184 144
3 x 150 278 216 213 166
3 x 185 317 247 244 190
3 x 240 374 292 287 224
1) maximum 9 cables routed horizontally in direct contact with one another on a cable rack

Sizing of cable cross section 3.2 Protective conductor
APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 23
Current-carrying capacity of PVC-insulated, 3-wire copper and aluminum cables with a maximum permissible conductor temperature of 70 °C at an ambient temperature of 40 °C according to IEC 60364-5-52
With higher amperages, cables must be connected in parallel.
Note: The recommendations for the North American market in AWG or MCM must be taken from the appropriate NEC (National Electrical Code)/CEC (Canadian Electrical Code) standards.
3.2 Protective conductor The protective conductor has to be dimensioned considering the following aspects:
In the event of an earth fault, it must be ensured that no excessively high touch voltages occur on the protective conductor as a result of voltage drops of the earth fault current (<50 VAC or 120 VDC, EN 50 178 Section 5.3.2.2, IEC 60 364, IEC 60 543).
The earth fault current flowing in the protective conductor in the event of an earth fault must not overheat the protective conductor.
Table 3- 1 Recommended cross-sectional area of external protective conductors
Cross-sectional area for phase conductors supplying the equipment S [mm2]
Minimum cross-sectional area of the external protective copper conductor SP [mm2]
S 16 S 16 < S 35 16
S > 35 S/2
Switchgear and motors are usually grounded via separate local ground connections. When this grounding arrangement is used, the current caused by a ground fault flows through the parallel ground connections and is divided. Despite the use of the relatively small PE conductor cross-sections specified in the table above, no impermissible contact voltages can develop with this grounding system. Based on experience with different grounding configurations, however, we recommend that the ground wire from the motor should be routed directly back to the converter. For EMC reasons and to prevent bearing currents, symmetrical 3-wire three-phase cables should be used where possible instead of 4-wire cables, especially on drives in the higher power range. The protective or PE conductor must be routed separately when 3-wire cables are used or must be arranged symmetrically in the motor cable. The symmetry of the PE conductor is achieved using a conductor surrounding all phase conductors or using a cable with a symmetrical arrangement of the three phase conductors and three ground conductors.

Sizing of cable cross section 3.2 Protective conductor
APxx: Cabling and Wiring Guidelines SINAMICS
24 Product Information, 11/20112
Through their controllers, the converters limit the load current (motor and ground fault currents) to an rms value corresponding to the rated current. We therefore recommend the use of a PE conductor cross-section analogous to the phase conductor cross-section for grounding the converter cabinet.

APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 25
Power cable selection 4 4.1 Types of power cable
Table 4- 1 Overview over power cable types
Construction Shield EMC evaluation
Symmetrical 3 + 3 Cu braid (possibly with Cu fleece)
Optimum
Symmetrical 3-core Cu braid (single core)
Good
Unsymmetrical 4-core Cu braid (possibly with Cu fleece)
Good
Symmetrical 3 + 3 – Satisfactory
Unsymmetrical 4-core – Mediocre
Unsymmetrical parallel cores or flat cable
Cu braid Mediocre
Unsymmetrical parallel cores or flat cable
– Poor

Power cable selection 4.2 Insulation material used for power cables
APxx: Cabling and Wiring Guidelines SINAMICS 26 Product Information, 11/20112
4.2 Insulation material used for power cables In view of minimizing the capacitance between the motor phase conductors and ground (see chapter High frequency disturbance (Page 7) ) it is advisable to choose cables with a possible specific capacitance as low as possible (pF/m).
The cable capacitance is directly proportional to the dielectrical constant of the insulation material of the cable. Material such as cross-linked polyethylene (XLPE) have a dielectric constant of about 2, rubber in contrast may have a dielectric constant of 5.
4.3 Power cables recommended by Siemens In general, we highly recommend PROTOFLEX EMV 3 Plus for the following reasons:
It can reduce the high frequency noise emission.
It can reduce the bearing current effects.
It has a minimal effective capacitance per unit length which is comparable to that of a standard unscreened cable (e. g. 3 x 70 + 3 x 10 has a capacitance of 290 nF/km).
The geometric arrangement of conductors and PE conductors is chosen such as to ensure identical coupling capacitances between phase to phase and phase to PE as shown in the figure below.
Figure 4-1 Principal cross-sectional view of screened symmetric motor feeder cable
However, it is important to check the cable specifications with the supplier! Different cable suppliers use different material for their cable sheaths, different quality with geometrical properties and so on. Therefore, compare the capacitance value / unit length of all these cables and select the one with the lowest value.

Power cable selection 4.3 Power cables recommended by Siemens
APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 27
For typical electrical and mechanical characteristics of power cables (PROTOFLEX EMV) see the two tables below:
Table 4- 2 Electrical specification PROTOFLEX EMV
Nominal voltage in three-phase AC operation U0 / U 0.6 / 1 kV Test AC voltage 4 kVeff Maximum permissible peak AC voltage U 1.7 kV FC connection on 3 Level frequency converter with a nominal voltage
U Max. 690 V
Coupling resistance 250 /km at 30 MHz Current carrying capacity The definitions in DIN VDE 0298 part 4
apply.
Table 4- 3 Mechanical specification PROTOFLEX EMV
Conductor according DIN VDE 0295 Copper, plain, finely stranded, class 5 Protective conductor according DIN VDE 0295 Copper, plain, finely stranded, class 5
For cross-sections > 16 mm2 the protective conductor is divided in three cores
Insulation according DIN VDE 0207 part 2 Thermoplastic compound on the basis of polyethylene (PE); compound 2YI1
Core identification according DIN VDE 0293 Green / yellow, black, blue, brown Screen 1. Layer 2. Layer
Multilayer screen Al-coated plastic tape braid of tinned copper wires
Sheath according DIN VDE 0207 part 5 PVC compound YM2 colour of sheath: orange, transparent
Marking
Cables with rated cross-section up to 10 mm2 [Year of manufacture] PROTOFLEX EMV-FC 2YSLCY-J [number of cores] X [cross-section] 600/1000 V [Year of manufacture] PROTOFLEX EMV-CY 2YSLCY-J [number of cores] X [cross-section] 600/1000 V
Cables with rated cross-section of 16 mm2 [Year of manufacture] PROTOFLEX EMV-FC 2YSLCY-J [number of cores] X [cross-section] 600/1000 V [Year of manufacture] PROTOFLEX EMV-CY 3PLUS 2YSLCY-J [number of cores] X [cross-section] 600/1000 V

Power cable selection 4.4 Installation guidelines
APxx: Cabling and Wiring Guidelines SINAMICS 28 Product Information, 11/20112
4.4 Installation guidelines Typical wiring to the drive for the recommended power cable type
Figure 4-2 Earthing and screening for motor connection
Using non-shielded motor cables, the noise current flows in an undefined fashion back to the frequency converter, e. g. via the crane’s steel structure, cable ducts, cabinet frames. These current paths have a very low resistance for currents with a frequency of 50 or 60 Hz. However, the noise current induces a high-frequency component which can result in problematical voltage drops.
A shielded motor cable is necessary to enable the noise current to flow back to the frequency converter in a defined fashion. The shield must be connected to the housing of the frequency converter and to the motor housing through a large surface area. The shield now forms the easiest path for the noise current to take when returning to the frequency converter.
Figure 4-3 Flow of the noise current with shielded motor cable
A shielded motor cable with a shield connected at both sides causes the noise current to flow back to the frequency converter through the shield.

Power cable selection 4.4 Installation guidelines
APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 29
4.4.1 Grounding and high-frequency equipotential bonding
The ground connections shown in black [0] represent the conventional grounding system for the drive components. They are made with standard, heavy-power PE conductors without special high-frequency properties and ensure low frequency equipotential bonding as well as protection against injury.
The connections shown in red inside the SINAMICS cabinets [1] provide solid bonding for high-frequency currents between the metal housings of the integrated Chassis components and the PE busbar and the EMC shield busbar of the cabinet. These internal connections can be made via a large area using non-isolated metal construction components of the cabinet. In this case, the contact surface must be bare metal and each contact area must have a minimum cross-section of several cm2. Alternatively, these connections can be made with short, finely stranded, braided copper wires with a large cross-section ( 95 mm2).
The shields of the motor cables shown in orange [2] provide high-frequency equipotential bonding between the Motor Modules and the motor terminal boxes. In older installations in which unshielded cables are already installed, or where the cables used have a shield with poor high-frequency properties, or in installations with poor grounding systems, it is absolutely essential to install the finely stranded, braided copper cables shown in red in parallel and as close as possible to the motor cable.

Power cable selection 4.4 Installation guidelines
APxx: Cabling and Wiring Guidelines SINAMICS 30 Product Information, 11/20112
The connections shown in red [3], [4] and [5] provide a conductive, high-frequency bond between the terminal box of the motor and the motor housing, and also between gearbox / driven machine and the motor housing. These connections can be omitted if the motor is constructed in such a way that a conductive, high-frequency bond is provided between the terminal box and the housing, and if motor, gearbox and driven machine are all in close proximity and all conductively bonded over a large area by means of a shared metallic structure, e.g. a metal machine bed.
The connections shown red dashed-and-dotted lines [6] provide a conductive, high-frequency bond between the cabinet frame and the foundation ground in the form of finely stranded, braided copper cables with large cross-section ( 95 mm2).
Note:
Grounding measures for machines are essentially a protective measure. However, in the case of drive systems, this also has an influence on the noise emission and noise immunity. A system can either be grounded in a star configuration or each component grounded separately. Preference should be given to the latter grounding system in the case of drive systems, i.e. all parts of the installation to be grounded are connected through their surface or in a mesh pattern.

Power cable selection 4.4 Installation guidelines
APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 31
4.4.2 Wiring guidelines in accordance to EMC rules
For example:
EMC-compliant installation of a SINAMICS G150 converter cabinet unit
Figure 4-4 Overview of best wiring practices adhering to EMC rules

Power cable selection 4.4 Installation guidelines
APxx: Cabling and Wiring Guidelines SINAMICS 32 Product Information, 11/20112
Further rules to avoid troubles caused by EMC:
The shield between the motor and SINAMICS Motor Module must not be interrupted by the installation of components such as output reactors, sine filters, du/dt filters, fuses, contactors. The components must be mounted on a mounting panel which simultaneously serves as the shield connection for the incoming and outgoing motor cables. Grounded partitions may be necessary to shield the components.
All of the metal cabinet parts must be connected through the largest possible surface areas (not paint on paint). Serrated washers should be used to ensure a good metal-metal contact. The cabinet door must be connected to the cabinet through grounding straps which must be kept as short as possible.

Power cable selection 4.4 Installation guidelines
APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 33
Contactors, relays, solenoid valves, surge arrestors, electromechanical operating hours counters, etc. in the cabinet must be provided with surge suppressor devices, for example, RC elements, diodes, varistors. These surge suppressor devices must be connected directly at the coil.
Non-shielded cables associated with the same circuit (outgoing and incoming conductor) must be twisted, or the surface between the outgoing and incoming conductors kept as small as possible in order to prevent unnecessary coupling effects.
Connect the reserve cables/conductors to ground at both ends to achieve an additional shielding effect.
In general, it is possible to reduce the noise being coupled-in by routing cables close to grounded cabinet panels. Therefore, wiring should be routed as close as possible to the cabinet housing and the mounting panels and not freely through the cabinet. The same applies for reserve cables/conductors.
Prevent noise from being coupled-in through the supply. SINAMICS Motor Modules and PLC / control electronics should be connected-up to different supply networks. If there is only one common network, the PLC / control electronics have to be de-coupled from the supply using an isolating transformer.

Power cable selection 4.4 Installation guidelines
APxx: Cabling and Wiring Guidelines SINAMICS 34 Product Information, 11/20112
4.4.3 Digital signals / encoder
Digital signals from encoders, transmitters or other devices must be wired with shielded cables. The shield must be connected at the source and at the target through a large surface area. The shield must not be interrupted, e.g. using intermediate terminals.
From the EMC point of view, the use of intermediate terminals should be avoided wherever possible because interruptions in the shield reduce its effectiveness. If it is impossible to avoid the use of intermediate terminals in certain cases, however, the signal cable shields must be properly bonded immediately before and after the intermediate terminals on clamping rails. The clamping rails must be connected to the cabinet housing at both ends with excellent electrical conductivity and with a large contact area.

Power cable selection 4.4 Installation guidelines
APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 35
If the equipotential bonding is poor between the shield connections, an additional equipotential bonding conductor with at least 10 mm² must be connected in parallel to the shield, to reduce the shield current. Generally, the shields can be connected to ground (panel housing) in several places. The shields can also be connected to ground at several locations, even outside the cabinet.
Foil-type shields are not to be favoured. Braided shields are at least 5 times more effective.

Power cable selection 4.4 Installation guidelines
APxx: Cabling and Wiring Guidelines SINAMICS 36 Product Information, 11/20112
4.4.4 EMC-compliant cable routing on the plant side on cable racks and in cable ducts
1) When single-wire cables (e.g. unshielded supply connection cables) are used in three-phase systems, the three phase conductors (L1, L2, and L3) must be bundled symmetrically to minimize the magnetic leakage fields. This is particularly important when several single-wire cables need to be routed in parallel for each phase of a three-phase system due to high amperages. The illustration below uses an example of a three-phase system with two single-wire cables per phase routed in parallel.
2) When several three-phase motor cables have to be routed in parallel between the converter and the associated motor, it has to be ensured that all three phases of the three-phase system are routed within each motor cable. This minimizes the magnetic leakage fields. The illustration below uses an example of three shielded, three-phase motor cables routed in parallel.

Power cable selection 4.4 Installation guidelines
APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 37
3) When DC cables (DC link cables or connection cables between Braking Modules and the associated braking resistors) are routed, the feed and return lines must be routed in parallel with as little space between them as possible to minimize magnetic leakage fields.
4) Signal cables and power cables must be routed separately (to eliminate coupled-in noise). Minimum clearance: 20 cm. If the minimum distance is not possible then partitions between power cables and signal cables as shown in the photo should be provided. The partitions must be grounded at several points along their length.

Power cable selection 4.4 Installation guidelines
APxx: Cabling and Wiring Guidelines SINAMICS 38 Product Information, 11/20112
4.4.5 Wiring requirements as per IEC 60204-32
Note
All entries of "chapter" in the following refer to the respective chapters in IEC 60204-32.
All connections must be securely fastened to prevent accidental loosening (chapter 13.1.1).
One protective conductor must be connected to one terminal connecting point unless the terminal is designed for two or more conductors (chapter 13.1.1).
Terminals on terminal blocks must be identified according to the markings in the drawing and clearly visible (chapter 13.1.1).
Figure 4-5 Terminals with proper marking

Power cable selection 4.4 Installation guidelines
APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 39
For aluminium conductors consideration shall be given to the problem of electrolytic corrosion (chapter 13.1.1).
Figure 4-6 Cupal plates to interface transformer aluminium conductors to copper cable shoes
Cables outside enclosures are to be protected by suitable ducts, conduits or cable trunking systems; for exceptions refer to chapter 13.4.2.
Figure 4-7 Examples for routing of cable on cable ladders in sill beam
Terminations of cable must be adequately supported to prevent mechanical stresses at the terminations of the conductors.

Power cable selection 4.4 Installation guidelines
APxx: Cabling and Wiring Guidelines SINAMICS 40 Product Information, 11/20112
Flexible conduit or flexible multi-conductor cable shall be used for connections involving small or infrequent movements. Excessive flexing and straining at the connection points has to be avoided (chapter 13.4.3).
Figure 4-8 Routing cable from main structure to boom across boom hinge
All exposed conductive parts of the electrical equipment and structure must be connected to the protective bonding circuit to protect against electric shock.
Figure 4-9 Protective bonding for junction boxes

Power cable selection 4.4 Installation guidelines
APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 41
Continuity of protective bonding circuit must be observed. Removal of any equipment due to maintenance reason should not interrupt the protective bonding circuit (chapter 8.2.3).
In case of IT supply, the structure will be used as part of the protective bonding circuit in conjunction with an earth fault supervision system (chapter 8.2.1).
4.4.6 Wiring practices to be avoided
1
Violation of IEC 60204-32, clause 14.2.2 requiring the PE conductor to be identified by color green-yellow.
2
Signal cables (purple color PROFIBUS bus communication cables) are mixed with power cables. Incoming power cables and outgoing motor feeder cables are not separated.
3
No EMC cable glands are used. Screens are connected to junction box PE via long pigtails.
4
Violation of IEC60204-32 clause 14.1.1 requiring that only one protective conductor shall be connected to one terminal connecting point.

Power cable selection 4.4 Installation guidelines
APxx: Cabling and Wiring Guidelines SINAMICS 42 Product Information, 11/20112
5
Violation of IEC60204-32, clause 14.1.1. The bolt fastening the cable shoe must be tightly fastened to the terminal connecting point. Serrated washers are to be used if the frame is painted.
6
Connection of cable screens via pigtails.
7
The screen connection of power cables and analog / digital signal cables on the same cable screen bar.
8
Violation of IEC60204-32 clause 8.2.3 Metal ducts of flexible or rigid construction and metallic cable sheaths shall not be used as protective conductors. Nevertheless, such metal ducts and the metal sheathing of all connecting cables (e. g. cable armouring, lead sheath) shall be connected to the protective bonding circuit.

Power cable selection 4.4 Installation guidelines
APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 43
4.4.7 Best practices for screened power cable termination The following sections show best practices for terminating screened power cable at the output of drive, intermediate junction box and motor junction box.
4.4.7.1 Termination in drive unit
Figure 4-10 Terminating screened cable at drive unit end
The figure above shows several interesting details:
the color of the cable is according to IEC 60204-32
the PE bar is indicated with the PE strips Green and Yellow strips.
the cable screen is electrically connected to the cable retaining bar via a cut-off section of the cable exposing the screen braid clamped down by a galvanized steel U-clamp or metal cable tie. The U-clamp is a preferred solution. This refer also to the picture on page 32 (Shield bonding to the EMC shield busbar in the converter using an EMC shield clip.

Power cable selection 4.4 Installation guidelines
APxx: Cabling and Wiring Guidelines SINAMICS 44 Product Information, 11/20112
Figure 4-11 Connecting power cable shields on strain relief bar in cabinet
The figure above shows the U-clamp types used to connect the screening braids of the screened (shielded) cables. These clamps have opposite pressure sleeves which provide a larger surface area for the screen connection, hence a better protection against electromagnetic influences. U-clamps made from non-magnetic materials such as stainless steel (e. g. PUK type K-AC LW) are a good choice for this type of installation.
4.4.7.2 Termination in intermediate junction box from screened power cables
Figure 4-12 Cable screen connection
The figure above shows an example of termination where the cable screen is connected to an isolated bar via metal cable tie. Connection for the cable screen can be done in the following way:
Cable screen is connected via an insulated bar in each junction box which means there is no connection to ground at intermediate points. The insulated bars are connected via intermediate points.

Power cable selection 4.4 Installation guidelines
APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 45
4.4.7.3 Termination in motor junction box A suitable metallic gland with shield connection must be used at the motor to connect the shield. It should be ensured that there is a low impedance connection between the motor terminal box and the motor housing. If required an additional grounding conductor should be installed.
! CAUTION
Do not use plastic motor terminal boxes and plastic cable glands!
Figure 4-13 Shield connection at the motor junction box
The shield can be connected through a metallic gland made of either nickel plated brass material for indoor usage or stainless Steel AISI 316L for harsh outdoor environment with a strain relief bar. Degree of protection of up to IP 68 is also available and as shown in the figure below.
EMI glands are available for example from the following suppliers:
SKINDICHT SHVE, Messrs. Lapp, Stuttgart
UNI IRIS Dicht or UNI EMV Dicht, Messrs. Pflitsch, Hückeswagen
HUGRO Armaturen GmbH

Power cable selection 4.4 Installation guidelines
APxx: Cabling and Wiring Guidelines SINAMICS 46 Product Information, 11/20112
Figure 4-14 Screened Power at the motor terminal box end

Power cable selection 4.4 Installation guidelines
APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 47
Figure 4-15 Internal view of the terminal box with cable entry
The examples above show how the usage of EMC cable glands completely avoids pigtails of the tinned copper braided shield connecting at the PE terminal connection. The external shield is properly cut away at the internal view of the terminal box and the shield is connected to the metal cable gland and to the housing of the motor terminal box.
Note for the use from 1-single Core shielded cables between Converter and Motor if it is not possible to use symmetrical 3 Core shielded cables:
Correct bundling as described in further capters
The engine should have an antimagnetic cable inlet to minimise the induced currents in the area of the cable inlet and the warming connected with that.
At the use of shielded 1 conductor cables the length of the Power cables should not be larger than 20 m. At Power cables lengths > 20 m the cable screens should be established only on the voltage system converter side and not on the Motor side to avoid ring currents in the screens which can warm the cables inadmissibly.
If the cable screens due to motor cable lengths > 20 m are not established at the motor, a high frequency technically suitable cable be provided for the high-frequency potential equalization between the converter and motorcase to minimise the bearing currents in the motor.
Because of the stray magnetic field extended opposite 3 core cables and the screen edition at the motor be avoided because cable lengths >20m you must calculate with an increased electromagnetic Interference emission of the drive.


APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 49
Installation of control cables 5 5.1 Installation of PROFIBUS cables
When you are laying the bus cable:
Don't twist it!
Don't stretch it!
Don't squash it!
In addition to this, you must take into account any influences on electromagnetic compatibility (EMC).
The maximum cable length depends on the baud rate (transmission speed). The maximum cable length can be increased by using repeaters, but no more than three repeaters should be connected in series. The maximum cable lengths given in the following table can only be ensured if PROFIBUS bus cables are used (e. g. Siemens PROFIBUS cable with type number 6XV1830-0AH10).
Table 5- 1 Permissible baud rate as a function of cable length
Baud rate Maximum cable length in a segment [m]
Maximum distance between two stations [m]
9.6 to 187.5 kBd 1000 10000 500 kBd 400 4000 1.5 MBd 200 2000 3 to 12 MBd 100 1000
Figure 5-1 Termination resistor settings in PROFIBUS connectors

Installation of control cables 5.1 Installation of PROFIBUS cables
APxx: Cabling and Wiring Guidelines SINAMICS
50 Product Information, 11/20112
Shielding of the bus cable / EMC measures In order to ensure interference-free operation of the PROFIBUS-DP especially in case of data transmission with RS485 the following measures are imperative:
For the PROFIBUS cable, the shield in the bus connector should be connected to the drive’s CBP card (CBP: Communication Board PROFIBUS). Shielding is also provided by the shield clamps (in the event of compact units) or by the shield clamps and cable ties (in the event of chassis-type units) on the converter housing. The following illustrations show you how to use the shield clamps. When removing the insulation from the various core ends please ensure that the solid copper core is not damaged.
Figure 5-2 Connecting the signal cable shields
Ensure that the shield of each bus cable is connected to protective earth, both where it enters the cabinet and at the converter housing.
Bus cables and power cables must not be laid parallel to each other. In case of crossing these cables should be laid in an angle of 90 ° to each other. The bus cables must be twisted and shielded and are to be laid separately from the power cables at a minimum distance of 20 cm. The braided shield and, if necessary, the underlying foil shield as well are to be connected on both sides through a large surface area so that they are highly conductive, i. e. the shield of the bus cable between two converters is to be connected to the converter housing at both ends of the cable. The same applies for the shielding of the bus cable between the PROFIBUS-DP master and the converters.

Installation of control cables 5.2 Installation of encoder cables
APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 51
Figure 5-3 Installation with separate cable ducts
5.2 Installation of encoder cables Siemens crane duty motors (see catalog HE1 N 2007) generally are equipped with incremental pulse encoders sourced from Hübner, Berlin.
Self-ventilated motors normally features hollow-shaft encoders type HOG. Non-ventilated motors are equipped with flange-mounted encoders type POG.

Installation of control cables 5.2 Installation of encoder cables
APxx: Cabling and Wiring Guidelines SINAMICS
52 Product Information, 11/20112
Figure 5-4 Combination of HOG 10DN with FSL centrifugal overspeed switch
Figure 5-5 HOG 10DN (left) and POG 10DN (right)
It is recommended to install a pre-fabricated encoder cable. For example, Hübner sensor cable HEK 8 is a proven industrial product designed to match high demands. It is halogen-free and its rugged outer construction allows it to be pulled and dragged in free conditions. It is certified to UL 20233. The cable can be supplied in any length and pre-fitted with various mating connectors.
Figure 5-6 HEK 8 cable at motor side (left) and at drive side (right)
Installation of control cables 5.2 Installation of encoder cables
APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 53
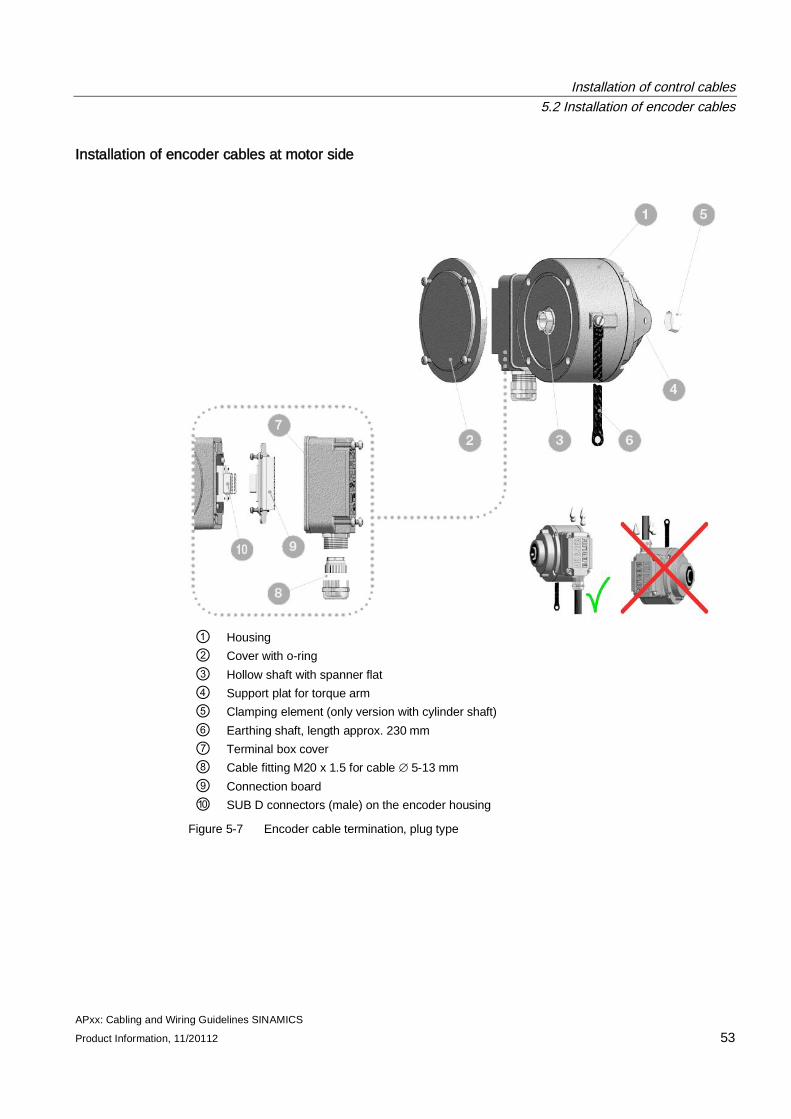
Installation of encoder cables at motor side
Housing Cover with o-ring Hollow shaft with spanner flat Support plat for torque arm Clamping element (only version with cylinder shaft) Earthing shaft, length approx. 230 mm Terminal box cover Cable fitting M20 x 1.5 for cable 5-13 mm Connection board SUB D connectors (male) on the encoder housing
Figure 5-7 Encoder cable termination, plug type

Installation of control cables 5.2 Installation of encoder cables
APxx: Cabling and Wiring Guidelines SINAMICS
54 Product Information, 11/20112
Figure 5-8 Encoder cable termination, terminal type
Figure 5-9 Encoder cable terminal

Installation of control cables 5.2 Installation of encoder cables
APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 55
Installation of encoder cables at drive side The encoder cable will be installed in the same manner as the PROFIBUS cable with all the precautions mentioned. After the shield is properly connected as according to chapter Installation of PROFIBUS cables (Page 49), the cables can be connected to the detachable terminal strips of either the encoder interface (e.g. SMC30, SMC20) of the drives.
Figure 5-10 Encoder cable signals


APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 57
Busbar connections (including cable connection) 6 To guarantee a proper connection to a busbar you have to use a bolt with conical washer and spring washer. The torque moment is depending on the thread size.
Table 6- 1 Connections by busbars or cables at connection busbars
Termination type Bolting
Conical spring washer DIN 6796
With spring washer
Screw: degree of firmness 8.8 (acc. ISO 898) nut: degree of firmness 8.8 (acc. ISO 898)
Thread size Bolting with conical spring washer
Torque [Nm] Bolting with spring water + washer DIN 125
Torque [Nm]
Fixing Fixing Checking M8 20 20 14 M10 40 40 28 M12 70 70 50 Free of maintenance Maintenance necessary
Torque check value = 70 % of fixing torque


APxx: Cabling and Wiring Guidelines SINAMICS
Product Information, 11/20112 59
Appendix A A.1 Contact
Application Center
Siemens AG Industry Sector I DT MC CR AP Frauenauracher Str. 80 D-91056 Erlangen
Tel.: +49 9131-98-5233
Fax: +49 9131-98-1424
mailto: [email protected]
www.automation.siemens.com


















