Applying Divide and Conquer Search Algorithm in...
24
Applying Divide and Conquer Search Algorithm in Traveling Salesman Problem ESE 499 Senior Design Project Heinz Schaettler (Supervisor) Washington University in St. Louis Electrical &Systems Engineering Associate Professor [email protected] (314) 935-6019 Campus Box 1127 One Brookings Drive St. Louis, MO 63130 Kevin Teng Systems Science Engineering Undergraduate Student [email protected] (919)270-5435 6122 Waterman Blvd. St. Louis, MO 63112
Transcript of Applying Divide and Conquer Search Algorithm in...

Applying Divide and Conquer Search
Algorithm in Traveling Salesman Problem
ESE 499 Senior Design Project
Heinz Schaettler (Supervisor) Washington University in St. Louis Electrical &Systems Engineering Associate Professor [email protected] (314) 935-6019 Campus Box 1127 One Brookings Drive St. Louis, MO 63130
Kevin Teng Systems Science Engineering Undergraduate Student [email protected] (919)270-5435 6122 Waterman Blvd. St. Louis, MO 63112

Abstract
The Traveling Salesman Problem is a classical operations research problem that deals
with optimization, scheduling, and planning. The objective of this senior design project is to
implement a divide and conquer algorithm to code a more efficient search algorithm than
conventional exhaustive methods. Using Matlab, the Traveling Salesman Problem was perceived
as an incidence matrix and divided into smaller sub-matrices. The divide and conquer method
algorithm successfully processed the graph faster than exhaustive approaches. However, an
important note to make is that there is a trade-off for the faster data processing. Though far
slower, the exhaustive method produces all possible paths and possibilities, whereas the divide
and conquer method neglects many paths. This divide and conquer method can be incorporated
into larger graph problems to expedite search time and search for a relatively viable and
efficient solutions.
Introduction
The Traveling Salesman Problem (TSP) is a classical optimization problem often studied
in operations research and theoretical computer science. The general idea of the problem is
that a salesman is assigned to traveling
through a set of n cities, but can only visit
each city once and cities have specific
paths connecting to another city
(Schättler, 88-100). Given these
restrictions, the salesman’s goal is to find
the shortest, optimal path. Further complications can be added to the problem such as a path

cost or queue time at a city. For the purpose of this project, the graph is converted to a
Hamiltonian graph. The paths have no weight and the paths are undirected (Hamiltonian Path).
Essentially a Hamiltonian graph is a simplified version of TSP graph without cost or direction. To
clarify future references, cycles and graph henceforth mentioned will be Hamiltonian.
TSP and Hamiltonian cycle represents a general, broader class of combinatorial
optimization problems called NP-complete. Therefore a specific algorithm applied to the TSP
will also be applicable to all NP-complete problems (Hoffman and Padberg). The motivation of
study the TSP is its applicability in real-world use. Scheduling, city design, genome sequecing,
and computer algorithms are some of the many fields that TSP contributes to (TSP Applications).
Methods
In order to easily manipuate and configure parameter of TSP, we converted a TSP graph
into an incidence matrix. The idea behind the conversion is to have a more numerical
representation of the problem for easy management and for a way to actually code the
problem in Matlab. A incidence matrix, pertaining to a unique graph, defines each row as a
node (city). The sequential columns represent the possible connections to the row node by
using 0 and 1. 0 are defined as having no connection between a specific nodes and 1 confirms a
path between the nodes. For simplification of the project, cost and direction between nodes
are omitted.
[ ]
Incidence matrix Graph
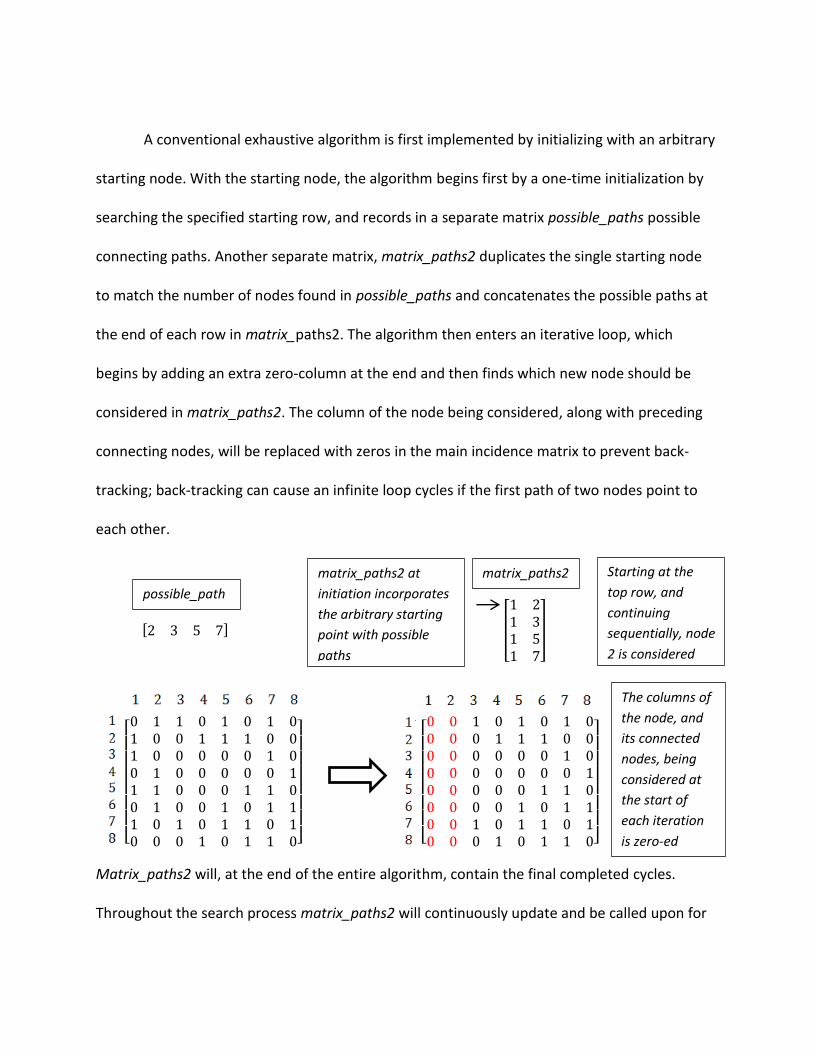
A conventional exhaustive algorithm is first implemented by initializing with an arbitrary
starting node. With the starting node, the algorithm begins first by a one-time initialization by
searching the specified starting row, and records in a separate matrix possible_paths possible
connecting paths. Another separate matrix, matrix_paths2 duplicates the single starting node
to match the number of nodes found in possible_paths and concatenates the possible paths at
the end of each row in matrix_paths2. The algorithm then enters an iterative loop, which
begins by adding an extra zero-column at the end and then finds which new node should be
considered in matrix_paths2. The column of the node being considered, along with preceding
connecting nodes, will be replaced with zeros in the main incidence matrix to prevent back-
tracking; back-tracking can cause an infinite loop cycles if the first path of two nodes point to
each other.
[ ] [
]
[ ]
[ ]
Matrix_paths2 will, at the end of the entire algorithm, contain the final completed cycles.
Throughout the search process matrix_paths2 will continuously update and be called upon for
The columns of
the node, and
its connected
nodes, being
considered at
the start of
each iteration
is zero-ed
matrix_paths2 matrix_paths2 at
initiation incorporates
the arbitrary starting
point with possible
paths
Starting at the
top row, and
continuing
sequentially, node
2 is considered
possible_path
ss
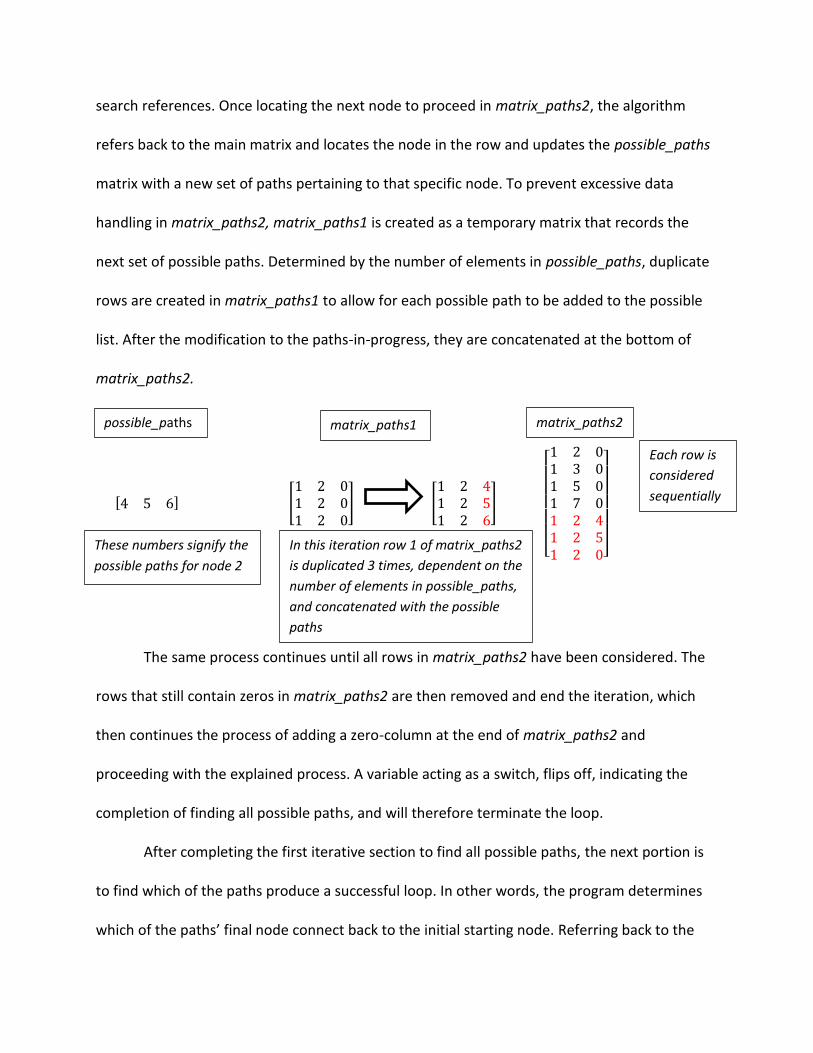
search references. Once locating the next node to proceed in matrix_paths2, the algorithm
refers back to the main matrix and locates the node in the row and updates the possible_paths
matrix with a new set of paths pertaining to that specific node. To prevent excessive data
handling in matrix_paths2, matrix_paths1 is created as a temporary matrix that records the
next set of possible paths. Determined by the number of elements in possible_paths, duplicate
rows are created in matrix_paths1 to allow for each possible path to be added to the possible
list. After the modification to the paths-in-progress, they are concatenated at the bottom of
matrix_paths2.
[ ] [
] [
]
[ ]
The same process continues until all rows in matrix_paths2 have been considered. The
rows that still contain zeros in matrix_paths2 are then removed and end the iteration, which
then continues the process of adding a zero-column at the end of matrix_paths2 and
proceeding with the explained process. A variable acting as a switch, flips off, indicating the
completion of finding all possible paths, and will therefore terminate the loop.
After completing the first iterative section to find all possible paths, the next portion is
to find which of the paths produce a successful loop. In other words, the program determines
which of the paths’ final node connect back to the initial starting node. Referring back to the
matrix_paths2 possible_paths
These numbers signify the
possible paths for node 2
matrix_paths1
In this iteration row 1 of matrix_paths2
is duplicated 3 times, dependent on the
number of elements in possible_paths,
and concatenated with the possible
paths
Each row is
considered
sequentially

initial main incidence matrix, without column editing, the non-zero elements of the starting
node column are determined. An additional zero-column is added to the matrix_paths2 to
leave space for editing and concatenation. The non-zero elements found in the starting node
column of the incidence matrix refer to nodes that have connections back to the starting node.
So cycling through the ending elements of each matrix_paths2 row, the paths that can
complete a Hamiltonian cycle are found. If the ending element of a row in matrix_paths2 does
not match one of the cycle nodes, the ending elements of that path will remain zero.
Conversely, if a matching node is found during the comparison, the starting node will be added
as a final element to that specific row in matrix_paths2. Completing each row comparison, the
paths that contain a zero at the end are deleted.
[ ]
[ ]
Another problem still exists after the completion of finding the cycles. Given the
exhaustive search algorithm properties, duplicate paths will form. So the next part of the
algorithm deletes the duplicate cycles. A separate delete matrix is created to keep track of
which rows should be deleted. Starting at the top of matrix_paths2, the cycle is reversed and
compared with each following cycle. The reason for reversing the cycle and then comparing is
because the duplicate cycles will be in reversed form of each other since the exhaustive method
will find both forward and reverse cycles. If two rows compared are identical, the row is
incidence matrix matrix_paths2
Connecting nodes are
found in the first column
in the incidence matrix
and compared to the
final elements of
matrix_paths2 and
added if they match

recorded and deleted immediately and jumps to the next row to be considered. Following this
process, matrix_paths2 will finally be left with all complete cycles for the specific TSP.
For the divide and conquer algorithm, given a TSP incidence matrix, the algorithm will
first divide the matrix into two separate sub-matrices. Splitting the matrix into four quadrants,
the second and fourth quadrants are the main focuses. Treating the two quadrants as separate
matrices, they are processed through the previously mentioned exhaustive search algorithm,
but stopping before finding cycles within the smaller sub-matrices.
[ ]
After running through the sub-searches the algorithm will produce two separate
matrices, matrix_paths_1 and matrix_paths_21, that contain path-pieces. For matrix_paths_2 a
simple equaton of matrix_paths_2 + a/2 is applied, variable “a” being the size of the incidence
matrix. Since the index of the fourth quadrant sub-matrix will be shifted, the equation is applied
to recalibrate the nodes to their correct indices. The unique elements of the first and last
columns of both matrix_paths_1 and matrix_paths_2 are determined and stored in four
matrices: link1, link2, link3, link4. The four matrices serve as a reference to see which ends of
the path-pieces connect. Starting with link1, each connective node is identified from the
incidence matrix and paths are identified from quadrant one. The identified paths are then
compared with link3 and link4. If there is a path between matrix link1 and link3 or link1 and
1 These matrices have different names from the code for clarification
incidence matrix Given an incidence
matrix, the divide and
conquer algorithm splits
the original matrix into
four quadrants
The second and fourth
quadrant sub-matrices are the
focus and are passed through
the exhaustive search
algorithm

link4, the path-piece pertaining to the identified node in link1 is called and combined with the
path-piece from link3 or link4. Depending on which node link1 is connected to, the
matrix_paths_1 path-piece will have to be reverse to correctly form the path. The same
procedure is used with link2 to obtain all possible paths.
[ ] [
]
[ ]
After piecing together the paths-pieces into a complete path in a new matrix matrixpaths, the
same procedure as described in the exhaustive method is used to find cycles and eliminate
duplicate paths.
Data and Analysis
Several tests were applied to both exhaustive and divide and conquer methods to
obtain detailed results. Beginning with the exhaustive search, a simple script was coded to
observe and plot the amount of time the algorithm took, beginning with a 3 by 3 matrix. With
each successive iteration, the matrix would increase by one node. A single circular path was
incorporated into the graph to ensure that no errors would occur when running the script. The
results of 350 iterations are shown in Figure 1. As one can see, the amount of time for each
matrix_paths_1 matrix_paths_2
link1 link2 link4 link3
incidence matrix
paths are identified in
quadrant 1 using link1
and link2 to determine
which nodes to refer to

0 50 100 150 200 250 300 350 4000
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
Nodes
Run T
ime (
s)
Run Time in Relation to Graph Size
Figure 1. Results of running the algorithm with
a matrix increasing by one node each iteration
0 5 10 15 20 250
10
20
30
40
50
60
70
80
Paths
Run T
ime (
s)
Run Time in Relation to Graph Complication
Figure 2. Results of running the algorithm with a matrix
increasing complexity by one path each iteration
successive iteration increases. However, most notable are the initial and ending changes. At
around 3 to 50 nodes, the time increases in a linear fashion. After reaching past 100 nodes, the
increase in time became more and more similar to an exponential function. Given that every
computer runs differently and often fluctuates due to hardware, background processes, and
external factors, fluctuations are unavoidable.
The next test that was conducted was to
increase the complexity of a graph with
each iteration. A 8 by 8 matrix is designed
to be sparse with only a circular cycle
path running through the graph. With each
iteration a path is connected between two
nodes. The diagonal of the incidence matrix,
however, must remain zero at all times. If
any element on the diagonal should be 1, it
signifies that a node has a path connecting
to itself, which is fundamentally incorrect
and will create errors when running
through the algorithm. Figure 2 shows the
results of the test. As one can see, the time
taken to complete the search increases
much more dramatically. Initially, the
change in time is almost nothing, however after more than 15 extra paths have been

incorporated into the matrix, the time increase drastically. An odd relative drop at around 21
paths appears consistently each time the test script is executed. My only guess is that the extra
paths generated at 20 and 21 do not generate too many extra cycles, which therefore will not
consume as much time.
Figure 3 to Figure 7 are data plots of the exhaustive method when a specified graph with
a certain percentage of spareness is determined.
0 10 20 30 40 50 60 70 80 90 1004
5
6
7
8
9
10
11
12
13x 10
-4 Computation Time 30% Fill with Graph Size 8
nth loop (Iteration)
Tim
e (
s)
0 10 20 30 40 50 60 70 80 90 1005
6
7
8
9
10
11
12
13x 10
-4 Computation Time 30% Fill with Graph Size 10
nth loop (Iteration)
Tim
e (
s)
0 10 20 30 40 50 60 70 80 90 1000.6
0.8
1
1.2
1.4
1.6
1.8x 10
-3 Computation Time 30% Fill with Graph Size 12
nth loop (Iteration)
Tim
e (
s)
0 10 20 30 40 50 60 70 80 90 1000.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6x 10
-3 Computation Time 30% Fill with Graph Size 15
nth loop (Iteration)
Tim
e (
s)
Figure 3. Graph size
8 with random paths
generated at 30% fill
Figure 4. Graph size
10 with random paths
generated at 30% fill
Figure 5. Graph size
12 with random paths
generated at 30% fill
Figure 6. Graph size
15 with random paths
generated at 30% fill

Figure 7. A compilation of the graphs of different
sizes with randomly generated paths all with 30% fill
0 10 20 30 40 50 60 70 80 90 1000.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4x 10
-3Computation Time between Graphs of Different Size and 30% Fill
nth loop (Iteration)
Tim
e (
s)
The dotted line apparent in Figure 3 to Figure 6 is the average run time for the specific graph.
As one can observe, the fluctuations are always random with each successive script run.
However, a very apparent trend is that there will generally always be some run times that are
greatly above and below relative to the average run time. This is due to the fact that the
randomly generated paths sometimes will generate more complete cycles, which will increase
the processing time for that specific
iteration. As expect, with the
increase of graph size the average
run time will be slower.
Something worth noting is the
combination plot in Figure 7. As one
can see, most of the run time for
the smaller graphs will be below the
time of larger graphs. However, there
are still a significant number of iterations that come close or even exceed the run time of a
larger graph. The impact of a graph’s run time is more dependent on the complexity of the
graph. Size does indeed play a role in how slow the graph is processed, as seen from the
previous exhaustive experiments; however, the graph complexity will play a larger role in
determining the run time.

0 10 20 30 40 50 60 70 80 90 1002
2.5
3
3.5
4
4.5
5
5.5x 10
-4 Computation Time with 100 Runs
nth loop(Iteration)
Run T
ime (
s)
Figure 8. Divide and conquer processing
an 8 node graph over 100 iterations
0 10 20 30 40 50 60 70 80 90 1001.5
2
2.5
3
3.5
4
4.5
5x 10
-4 Computation Time with 100 Runs
Run Times (Loop)
Run T
ime (
s)
Figure 9. Divide and conquer processing
different sized graphs over 100 iterations
Figure 8 and Figure 9 are data obtained from testing the divide and conquer algorithm.
Figure 8 shows the run time over 100 iterations.
What is very noticeable is that there are almost
no iteration that have a run time close to the
average run time. Though there are some, the
occurrence is very low. Most of the iterations
have a run time significantly higher or lower than
the average run time.
Figure 9 shows a plot comparing the run
time of several graphs of different sizes. Similar to
the exhaustive method, the run times often vary
and sometimes run longer than graph sizes
that are larger. One very peculiar thing to note
is that the blue graph, with a graph size of 20
nodes, has a significantly higher run time than
the preceding 18 node graph. I speculate that
similar to the exhaustive search method, the
larger the graph size becomes, exponentially longer the run time will be. However, it must be
noted that the run time is still on the scale of 10-4 seconds whereas the exhaustive method
would already be in the 10-3 realm. The increase in time mathematically is still considerably
small, but in the graphical perspective, the average increase run time is quite distinguishable.

0 10 20 30 40 50 60 70 80 90 1001
2
3
4
5
6
7x 10
-3 Computation Time with 100 Runs
nth loop (Iterations)
Run T
ime (
s)
Figure 10. Comparison of run times between
exhaustive and divide and conquer methods
Given the same graph, both algorithms were applied with 100 iterations. Figure 10
shows the run time comparison between the two methods. The blue plot is the run time for the
divide and conquer method and the red
plot is the run time for the exhaustive
search method. The difference between
the two is quite large. Theoretically,
the divide and conquer should indeed
run at a faster speed, since as we
observed in the exhaustive algorithm
data, the larger the graph, the longer the time
it takes to compute in an exponential behavior.
And since the divide and conquer method does incorporate the exhaustive method, but with
smaller matrices, it should be considerably faster, and the difference should be apparent in
larger graph sizes. Again, it is noted that there are sometimes very large spikes in the graph, as
one can see in Figure 10, at around the 58th iteration. There is an enormous run time spike that
comes close or even surpasses the exhaustive method run time.
This random outlier was probably caused by a sudden hiccup in the computer’s
background process. But it is also possible that at a small enough graph size, the divide and
conquer method may run slower. Due to the fact that the divide and conquer will split the
original graph to two sub-matrices, the extra computation in dividing and comparing paths-
pieces can possibly increase run time and run slower than the exhaustive method for small
graphs. Figure 11 shows the comparison between the exhaustive and divide and conquer

0 50 100 150 200 250 300 3500
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5Split and Exhaustive Comparison
Graph Size (Nodes)
Run T
ime (
s)
Figure 11. Comparison between exhaustive and
divide and conquer method with increasing graph
size per iteration
method when computing for a graph whose size increases by one node each iteration. The red
plot defines the exhaustive search algorithm and the blue line denotes the divide and conquer
method. The run time speed for the
exhaustive search is considerably slower
than that of the divide and conquer
method. Towards the largest graph size
tested, a 350 node graph, the exhaustive
search reaches almost 0.5 seconds to
complete whereas the divide and
conquer method reaches a value close to
0.1 seconds. The difference in run time is quite large with larger graph sizes. At the small graph
sizes, the two algorithms run quite well until about 50 nodes, when the speed differentiation
becomes more apparent. At the earlier stages, the divide and conquer can still possibly run
slower, as one can see at around 10 nodes the divide and conquer method had a considerably
slower run time. The outlying point can also be a product of the computer’s error; however, I
think it is a high possibility that in some certain graphs the divide and conquer can be slower
than the exhaustive method. Overall, only a small percentage of graphs will run more efficiently
by utilizing the exhaustive method.
To further investigate the behavior of the exhaustive and divide and conquer method, I
processed the logarithmic run time of the two systems. The graph would plot a linear behavior
if the algorithm is exponential. But shown in Figure 12, the behavior of the exhaustive search is

Figure 12. A quadratic plot fitting to the
exhaustive search algorithm
0 50 100 150 200 250 300 350-8
-7
-6
-5
-4
-3
-2
-1
0
Graph Size (Nodes)
Logarith
mic
Run T
ime
Exhaustive Logarithmic Analysis
y = - 3.7e-005*x2 + 0.028*x - 6.3
y = 1.9e-007*x3 - 0.00014*x2 + 0.043*x - 6.8
y = - 1.3e-009*x4 + 1.1e-006*x3 - 0.00035*x2 + 0.06*x - 7.1
data 2
quadratic
cubic
4th degree
Figure 13. Extra cubic and 4th degree
fitting plots to the exhaustive algorithm
0 50 100 150 200 250 300 350-8
-7
-6
-5
-4
-3
-2
-1
0
Graph Size (Nodes)Logarith
mic
Run T
ime
Exhaustive Logarithmic Analysis
y = - 3.7e-005*x2 + 0.028*x - 6.3
data 2
quadratic
a quadratic polynomial. As the script
runs, one can see the slow plateau
behavior of the graph. Converting the
logarithmic back to the original run
time, the curve would be escalating
upwards faster. Figure 12 also shows a
basic fitting of the logarithmic plot.
Using the built-in Matlab fitting tools, the basic
behavioral equation is in the form
of . Testing out higher
order plot fittings, though do
increase the accuracy, but not
significantly. It can probably be
concluded that the behavior
closely resembles a quadratic
function. Figure 13 shows other
basic fittings to the exhaustive method. The
divide and conquer has a similar behavior to
the exhaustive search, since both apply the same basic foundation. The divide and conquer
method just performs the task to a much more efficient degree.

Conclusion
The divide and conquer method indeed does have a much more efficient search pattern
compared to that of the exhaustive search. However, it must be noted that the divide and
conquer method does not find every single possible cycle. Contrary to the divide and conquer,
the exhaustive method can successfully list out all the paths, but at a high time consuming cost.
Though reliable in the sense that given a smaller problem, the solution can be quickly searched
and optimized. However, in many worldly problems, the graph size is often of large magnitude,
and requires a faster algorithm. Given the massive size of some optimization problems, it is
sometimes ideal to forgo optimal solutions and settle for a reasonable option calculated in a
faster method.
In this respect, the divide and conquer method is a viable approach in solving NP-
complete optimization problems, as it performs computational task faster than brute force
exhaustive methods. In a larger graph scenario, the divide and conquer will be able to calculate
a reasonable solution within a shorter period time and is more pragmatic compared to the
exhaustive method.
Future Motivations and Studies
TSP is a highly studied topic and its applications are very widespread. One major topic
that can utilize this TSP divide and conquer method is genome sequencing. The purpose of
genome sequencing is to determine the DNA sequence of an organism’s genome. The
applications of understanding the complete details and structure of a genome can lead to many
scientific development and studies involved in medicinal and evolutionary fields. However, the

major obstruction is the sheer length of genomes. The time to sequence a genome, is vastly
unreasonable and long.
To confront this issue, geneticists often break up and split long genome sequences into
smaller pieces. Translating each smaller portion, the geneticists mark each piece with a marker,
which denotes the likelihood of the specific piece following another. One can conceptualize this
as a TSP, where each genome piece represents a node and the likelihood that a piece follows
another acts as a path with a cost (TSP Applications). The divide and conquer search algorithm
can possible play a part in expediting genome sequencing with its efficient search properties,
especially since the divide and conquer method far exceeds the exhaustive search method in
larger exhaustive problems.

References
"Hamiltonian Path." Wikipedia, the Free Encyclopedia. 05 May 2005. Web. 05 Dec. 2011.
<http://en.wikipedia.org/wiki/Hamiltonian_path>.
Hoffman, Karla, and Manfred Padberg. "The Traveling Salesman Problem." Web. 05 Dec. 2011.
<http://iris.gmu.edu/~khoffman/papers/trav_salesman.html>.
Schättler, Heinz. “Operations Research.” Powerpoint presentation for Introduction to Systems
Science and Engineering, Washington University in St. Louis. Fall 2010
"TSP Applications." Traveling Salesman Problem. Jan. 2007. Web. 05 Dec. 2011.
<http://www.tsp.gatech.edu/apps/index.html>.

Appendices
A 1.
Matlab script for exhaustive search algorithm
%Given problem
%A = [0 1 0 1; 1 0 1 0; 0 1 0 1; 1 0 1 0]
%A = [0 1 1 1; 1 0 1 1; 1 1 0 1; 1 1 1 0]
% A = [0 1 1 0 1 0 1 0; 1 0 0 1 1 1 0 0; 1 0 0 0 0 0 1 0; 0 1 0 0 0 0 0 1; 1
1 0 0 0 1 1 0 ; 0 1 0 0 1 0 1 1 ; 1 0 1 0 1 1 0 1 ; 0 0 0 1 0 1 1 0];
function [matrix_paths2 run_time] = matrix_paths(A)
tic %starts the timing of the process
%Initializing variables
C = A; % matrix for modification
button = 0; %condition to stop looping
starting = 1;
matrix_paths1 = [];
matrix_paths2 = [];
%initializing phase to start off the operation
possible_paths = find(C(starting(1),:)); %find the possible continuing pathes
a = size(possible_paths,2); %checks to see initially how many paths are
possible
matrix_paths2 = zeros(a,1); %creates a column of zeros to start adding
matrix_paths2(:,1) = starting; %sets the first column to be the starting
point
matrix_paths2(:,2) = possible_paths'; %transposes possible paths and add it
onto the first point
%Actual cycling and looking for paths
while (button == 0)
k = size(matrix_paths2,2); %used to search the correct column
matrix_paths2(:,end+1) = 0; %creates a column of zeros to fix
concatenation issue
for i = 1:size(matrix_paths2,1)
starting = matrix_paths2(i,k); %changes which row we starting
searching for paths
C(:,matrix_paths2(i,1:k)) = 0; %modifies C for that specific path
possible_paths = find(C(starting,:)); %finds all possible connections
for that specific path
if(isempty(possible_paths)==0) %this confirms that there is a
available path. if not a zero is added at the end
%let that line be eliminated after the inner for loop
p = size(possible_paths,2); %sets the number path duplication
needed
else %if no available path is given, set the next path to be zero so
it can be deleted later on
p = 1;
possible_paths = 0;
end
for j = 1:p
matrix_paths1 = [matrix_paths1;matrix_paths2(i,:)]; %creates
additional paths, manual concatentation
end

matrix_paths1(:,end) = possible_paths'; %adds those paths to
matrix_paths1
matrix_paths2 = [matrix_paths2;matrix_paths1]; %concatenates those
new paths at the BOTTOM of matrix_paths2
matrix_paths1 = []; %resets matrix_paths1 for the next cycle
if(size(matrix_paths2,2) == size(A,2)) %checks to see the termination
condition
button = 1; %sets the button to 1 to temrinated the while loop
end
C = A; %resets matrix C for other paths
end
[x,y] = find(matrix_paths2 == 0); %finds all rows that have zeros
matrix_paths2(x',:) = []; %deletes those rows, as they are not needed
end
%Section checks for complete loops
[q,w] = find(A(:,matrix_paths2(1,1))); %figures out which pathes will have a
complete loop
[e,r] = size(matrix_paths2);
matrix_paths2(:,end+1) = 0; %adds an extra column of zeros so additional
paths can be added
for t = 1:e
if(find(q' == matrix_paths2(t,end-1)) > 0) %if the end element of a paths
exists in q, then it is
%a complete cycle
matrix_paths2(t,end) = matrix_paths2(t,1); %completes the loop if it
exists
else
matrix_paths2(t,end) = 0; %tags a zero if it isn't a complete loop
end
end
[x,y] = find(matrix_paths2 == 0); %finds all rows that have zeros
matrix_paths2(x',:) = []; %deletes those rows, as they are not needed
%This section deletes the repeats
delete = []; %keeps track on the row number to be deleted
counter = 1; %counter to increment the row
while(size(delete,2) <= size(matrix_paths2,1)/2) %termination factor is
decided by when the delete matrix size
%is less than equal to half the number of rows of matrix paths
o = size(matrix_paths2,1); %resets the for loop, since we are editing the
paths directly
for u = 1:o
if(fliplr(matrix_paths2(counter,:)) == matrix_paths2(u,:))%checks to
see if two rows are the same
delete(end+1) = u; %adds to the delete matrix
matrix_paths2(u,:) = []; %deletes the row if condition is met
break %once condition is met, jump out of the for loop
end
end
counter = counter + 1; %increases the counter
end
matrix_paths2;
toc; %ends the timing on the process
run_time = toc;

A 2.
Matlab base script for divide and conquer algorithm.
function [matrix_paths2] = matrix_split_graph(A)
%Initializing variables num_starting = find(sum(A,2) == 1); %finds the row that only have one path starting = []; %initializing the variable if (size(num_starting,1) > 2) %if any sub-matrix has more than three nodes
with more one path, we can conclude that %the sub matrix we arbitrated is in more than one piece error('Sub-matrix has broken subsections') elseif (isempty(num_starting) == 1) %if no node has a single path, choose
first node arbitrarily starting = 1; else starting = num_starting(1); %randomly choose one of the two (if two exist)
as a starting point end C = A; % matrix for modification button = 0; %condition to stop looping beginning = starting; matrix_paths1 = []; matrix_paths2 = [];
%initializing phase to start off the operation possible_paths = find(C(starting(1),:)); %find the possible continuing pathes a = size(possible_paths,2); %checks to see initially how many paths are
possible matrix_paths2 = zeros(a,1); %creates a column of zeros to start adding matrix_paths2(:,1) = starting; %sets the first column to be the starting
point matrix_paths2(:,2) = possible_paths'; %transposes possible paths and add it
onto the first point
%Actual cycling and looking for paths while (button == 0) k = size(matrix_paths2,2); %used to search the correct column matrix_paths2(:,end+1) = 0; %creates a column of zeros to fix
concatenation issue for i = 1:size(matrix_paths2,1) starting = matrix_paths2(i,k); %changes which row we starting
searching for paths C(:,matrix_paths2(i,1:k)) = 0; %modifies C for that specific path possible_paths = find(C(starting,:)); %finds all possible connections
for that specific path if(isempty(possible_paths)==0) %this confirms that there is a
available path. if not a zero is added at the end %let that line be eliminated after the inner for loop p = size(possible_paths,2); %sets the number path duplication
needed else %if no available path is given, set the next path to be zero so
it can be deleted later on

p = 1; possible_paths = 0; end for j = 1:p matrix_paths1 = [matrix_paths1;matrix_paths2(i,:)]; %creates
additional paths, manual concatentation end matrix_paths1(:,end) = possible_paths'; %adds those paths to
matrix_paths1 matrix_paths2 = [matrix_paths2;matrix_paths1]; %concatenates those
new paths at the BOTTOM of matrix_paths2 matrix_paths1 = []; %resets matrix_paths1 for the next cycle if(size(matrix_paths2,2) == size(A,2)) %checks to see the termination
condition button = 1; %sets the button to 1 to temrinated the while loop end C = A; %resets matrix C for other paths end [x,y] = find(matrix_paths2 == 0); %finds all rows that have zeros matrix_paths2(x',:) = []; %deletes those rows, as they are not needed end
%This section deletes the repeats matrix_paths2(:,1) = [] % deletes the first column delete = []; %keeps track on the row number to be deleted counter = 1; %counter to increment the row button2 = 0; %to keep track when to terminate the loop while(button2 == 0) %termination factor is decided by when the delete matrix
size %is less than equal to half the number of rows of matrix paths o = size(matrix_paths2,1); %resets the for loop, since we are editing the
paths directly for u = 1:o if(fliplr(matrix_paths2(counter,:)) == matrix_paths2(u,:))%checks to
see if two rows are the same delete(end+1) = u; %adds to the delete matrix matrix_paths2(u,:) = [] %deletes the row if condition is met break %once condition is met, jump out of the for loop end end o = size(matrix_paths2,1); counter = counter + 1; %increases the counter if(counter >= o) %if the counter is the same size or greater than o we
have reached the bottom of the matrix button2 = 1; %flips the switch to break out of the loop end end matrix_paths2 = fliplr(matrix_paths2); %flips the matrix left-right matrix_paths2(:,end+1) = beginning %adds the column back to the end matrix_paths2 = fliplr(matrix_paths2) %flips the matrix left-right again

A 3.
Second part of divide and conquer method that calls upon A 2 script.
clean runtime = [];
A = [0 1 1 0 1 0 1 0; 1 0 0 1 1 1 0 0; 1 0 0 0 0 0 1 0; 0 1 0 0 0 0 0 1; 1 1
0 0 0 1 1 0 ; 0 1 0 0 1 0 1 1 ; 1 0 1 0 1 1 0 1 ; 0 0 0 1 0 1 1 0]; a = size(A,1); %keeps a size to calibrate index [matrix_paths] = matrix_split_graph(A(1:4,1:4)); %runs first submatrix [matrix_paths2] = matrix_split_graph(A(5:8,5:8)); %runs second submatrix matrix_paths2 = matrix_paths2 + a/2; %modifies the index of second submatrix
to be consistent clc [x,y] = size(matrix_paths); %finds the unique elements in the first and last column of each submatrix link1 = transpose(unique(matrix_paths(:,1))); link2 = transpose(unique(matrix_paths(:,end))); link3 = transpose(unique(matrix_paths2(:,1))); link4 = transpose(unique(matrix_paths2(:,end)));
matrixpaths = []; counter = 1; %to index matrixpaths correctly %checks to see which nodes connect to the front of the first submatrix %using the front of the second submatrix for u = 1:101 tic for i = 1:size(link1,2) connection = find(A(link1(i),a/2+1:a)) + a/2; %finds all possible
connections for specific node link1_3 = ismember(link3, connection); %checks to find if such
element links to the front of the second submatrix link1_4 = ismember(link4, connection); %checks to find if such
element links to the end of the second submatrix if(nnz(link1_3 == 1)) %if there are nonzero elements in link1_3 [q,w] = find(matrix_paths(:,1) == link1(i)); %find the positions
of the rows [e,r] = find(matrix_paths2(:,1) == link3(find(link1_3))); %find
the positions of the rows for p = 1:size(e) for o = 1:size(q) matrixpaths(counter,:) =
[fliplr(matrix_paths(q(o),:)),matrix_paths2(e(p),:)]; %combines the two
matrices counter = counter + 1; %increment counter end end end %checks to see which nodes connect to the front of the first
submatrix %using the end of the second submatrix if(nnz(link1_4 == 1)) [q,w] = find(matrix_paths(:,1) == link1(i)); [e,r] = find(matrix_paths2(end,:) == link4(find(link1_4)));

for p = 1:size(e) for o = 1:size(q) matrixpaths(counter,:) =
[matrix_paths2(e(p),:),matrix_paths(q(o),:)]; counter = counter + 1; end end end end
%same procedure but connects to the end of the first submatrix for i = 1:size(link2,2) connection = find(A(link2(i),a/2+1:a)) + a/2; link2_3 = ismember(link3, connection); link2_4 = ismember(link4, connection); if(nnz(link2_3 == 1)) [q,w] = find(matrix_paths(:,end) == link2(i)); [e,r] = find(matrix_paths2(:,1) == link3(find(link2_3))); for p = 1:size(e) for o = 1:size(q) matrixpaths(counter,:) =
[matrix_paths(q(o),:),matrix_paths2(e(p),:)]; counter = counter + 1; end end end if(nnz(link2_4 == 1)) [q,w] = find(matrix_paths(:,end) == link2(i)); [e,r] = find(matrix_paths2(:,end) == link4(find(link2_4))); for p = 1:size(e) for o = 1:size(q) matrixpaths(counter,:) =
[matrix_paths2(e(p),:),fliplr(matrix_paths(q(o),:))]; counter = counter + 1; end end end end runtime(end+1) = toc; end runtime(1) = [];
num_runs = linspace(1,100,100); plot(num_runs,runtime,num_runs,mean(runtime)) title('Computation Time with 100 Runs') xlabel('nth loop(Iteration)') ylabel('Run Time (s)')