Applications of Machine Vision - Latest Seminar Topics … Notes: 各授課業界教師 References:...
48
Applications of Machine Vision O Overview and Introduction Instructor: Chao-Ching Ho National Yunlin University of Science and Technology Robotic Embedded System Lab Robotic Embedded System Lab
-
Upload
doankhuong -
Category
Documents
-
view
220 -
download
1
Transcript of Applications of Machine Vision - Latest Seminar Topics … Notes: 各授課業界教師 References:...
-
Applications of Machine Vision
OOverview and Introduction
Instructor: Chao-Ching HoNational Yunlin University of Science and Technology
Robotic Embedded System LabRobotic Embedded System Lab
-
Overview of the Machine Overview of the Machine Vision classVision class
When and where to take class Who should take the class Why machine vision What is machine vision How to learn machine vision by steps
-
When and where to take When and where to take classclass Office Hours
10:00 -12 :00, Wednesday Room EM 317
Classroom EB205 Wednesday, 14:10- 17:00 (FGH)
Class web page http://sites.google.com/a/smartrobot.co.cc/robot/courses/machinevisionappl
TA EM330
http://sites.google.com/a/smartrobot.co.cc/robot/courses/machinevisionapplmailto:[email protected]
-
TextbooksTextbooks
Lecture Notes:
References: Visual Servoing Control Based Three-Dimensional Tracking: Theory, Algorithms, Practicalities
(Paperback), Chao-Ching Ho, LAP, 2009. Ramesh Jain and R. Kasturi, Machine Vision,
McGraw Hill, April 1995.
http://www.amazon.com/Visual-Servoing-Control-Three-Dimensional-Tracking/dp/3838305353/ref=sr_1_1?ie=UTF8&s=books&qid=1257845330&sr=1-1http://www.libwebpac.yuntech.edu.tw/Webpac2/store.dll/?ID=110317&T=2&S=ASC&ty=ns
-
Grading Policy
Course participance (10%) Students are encouraged to exercise the
assignments and practice to present in class Mid-term Report (40%)
Propose a 1or 2 page report to express the motivation of specified machine vision topic.
Final Report (50%) Based on the learned machine vision knowledge,
select one topic, study and give a presentation.
-
Course Topics Machine Vision Overview and Introduction ( ) ( ) ( ) ( ) ( ) ( )
( ) ( )
( ) ( ) ( )
-
Who should take the class
If youre interested in the fields of Image Processing Animation Computer Graphics Automatic Optical Inspection Robotic Vision 3D Scanning technology Combined vision with industrial engineering Combined vision with consumer engineering
-
Why machine vision
An image is worth 1000 words Many biological systems rely on vision. The world is 3D and dynamic. Cameras and computers are cheap and popular Sometimes, the sensor or the environment are
actively changed to make a task easier. This is called Active Vision
-
Application areas
Industrial inspection, quality control, Reverse Engineering
Video Surveillance and security, road monitoring Pattern Recognition, Face/Gesture Recognition,
Human-computer interfaces Artificial Intelligence, unmanned vehicles Robotics, Visual Servoing Virtual Reality, tele-operations Medical Image analysis (MRI, CT, X-ray)
-
What is machine vision
Also termed computer vision, robot vision A machine automatically processes an image and
reports what is in the image Recognize the content oft he image Locate and inspect the objects in the image
Machine vision is vision for machine Measurement of features Pattern classification based on those features
Measurement of features focuses on processing the image pixels and extract sets of measurement
Vision = Geometry + Measurement + Interpretation
-
(Machine Vision)(Computer Vision)
(Automated Optical Inspection)
2004 ( )
-
Machine Vision focuses on:
What information should be extracted?
How can it be extracted?
How should it be represented?
How can it be used to achieve the goal?
Related disciplines Image processing Pattern recognition Photogrammetry Computer graphics Artificial intelligence Projective geometry Control theory
-
Sensors
-
Intensity Images
Light coming from the world hits the sensor.Light coming from the world hits the sensor.
-
Digital Images
are 2D arrays (matrices) of numbers:
-
Applications
-
Robot Soccer Initiative
Basic Architecture for Robot Soccer Systems
Robots on the
playing field
Host comput
er
Host compu
ter
Vision system
Communication
SystemCommunic
ation System
-
Reverse Engineering
Combine color and range dataUse knowledge about most likely shapes
The Pennsylvania State University
-
(AOI) What is AOI
Automatic Optical Inspection
CCD
CCD
Copyright 2008 ITRI
-
AOI
IC PCB LCD BGA AOI
- - -
2004 ( )
-
AOI ( )
AOI : : :X : : ( )
: :AOI
2004 ( )
-
National Instruments
-
Average intensity of a region
Standard deviation Line profile
National Instruments
-
Coordinate SystemsOrigin of
coordinate system is based on a pattern match
Defined by the location and angle of a reference point (Origin) within the image.
Based on the Origin, regions of interest will shift and rotate with the unit under test.
National Instruments
-
Identification & Classification
1D Barcodes 2D Barcodes
DataMatrix PDF 417
Optical Character Recognition
National Instruments
-
IC
National Instruments
-
Image AcquisitionCo
mpute
r
MotionControlDataAcquisition
I/O, Monitoring, Control
National Instruments
-
/
/
/
/
Stage
/Flat-field correction
Gain and offset
Image alignment
:
Copyright 2008 ITRI
-
OpenOpen
ShortShort
Mouse-biteMouse-bite
Etc.Etc.
( )
Copyright 2008 ITRI
-
(3D Visual Servoing
Control)
USB
dsPIC
UART
5-axis manipulator
color camera
encorder
motor drivers
PC
-
(3D Visual Servoing
Control)
KERNEL MODE USER MODE
KEY
Device Control Block
USB CameraRobot DSP WDM Driver
SyncFilter
MODE Class BaseFunc Function Multiply Function
PID DSP
RS232
User InterfaceCalibration Intrinsic ParametersExtrinsic Parameters
Hand-Eye HomogeneousCAMSHIFT Algorithm HSV Transform Back-ProjectionStereo Computing 3D Position of Fish 3D Position Robot Arm
-
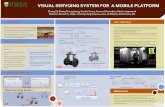
(Mobile Robot) USB
dsPIC
dsPIC UART
UART
DC motor
servo motor
color camera
encorder PC
Far Obstacle
Tracking Target
Middle Obstacle
Near Obstacle
Wheel Mobile Robot
-
3D Scan
-
3D Scan
-
Machine vision vs. Image Processing Image processing tries to make images look
better, the output of an image processing system is an image.
The output of the machine vision system is information about the content of the image.
-
+ + +Lighting
andOptics
Camera or
Sensor
Frame Grabber or
Vision SystemApplicationSoftware
National Instruments
-
NI Vision Acquisition Software
RGB
with
Still
Colo
r
IEEE
-139
4
Came
ra lin
k
Came
ra lin
kNational Instruments
-
General structure of a CV problem
ProblemProblem
ImageImageAcquisitionAcquisition Pre-processingPre-processing
Feature Feature ExtractionExtraction
SensorSensor IlluminationIllumination
NoiseNoise Img enhancementImg enhancement TransformTransform
LinesLines CornersCorners ContoursContours RegionsRegions Optical flowOptical flow
AnalysisAnalysis
Knowledge BaseKnowledge Base
InterpretationInterpretation
-
Keyence Machine Vision System Applications
Task: Part IdentificationDifferentiation of the buttons on a mobile phone
Task: Defect InspectionInspection of burnt marks/short-circuit of connector resin
Task: Presence/Absence detectionDetecting defective pin plating Keyence
Task: Defect InspectionInspection of trimmer switch position
-
Task: Part IdentificationChecking correct cable assembly
Task: Presence/Absence detectionDetecting reject marks on electronic components
Dimension MeasurementMeasuring the coplanarity of connector pins
Task: PositioningPositioning of a CCD device
Electrical and Electronic Industries Keyence
-
Task: CountingChecking BGA solder balls
Task: Dimension MeasurementPositioning confirmation for silicon wafers
Task: PositioningPositioning of LCD glass substrates Task: Counting
Detecting ink marks on a silicon wafer
Electrical and Electronic Industries Keyence
-
Automotive and Metal Industries Keyence
Task: Part IdentificationDifferentiation of cylinder blocks
Task: Defect InspectionCrankshaft porosity detection
Task: Presence/Absence detectionDetecting the presence/absence of bearing grease
Task: Part IdentificationDifferentiation of tires
-
Automotive and Metal Industries Keyence
Task: PositioningPosition control of a robot
Task: Dimension MeasurementMeasuring the notch position of a gear
Task: Defect InspectionInspection of flaws on a steel plate
Task: Presence/Absence detectionDetecting the groove defect in a piston head
-
Automotive and Metal Industries Keyence
Task: CountingCheck correct seating of parts for die protection
Task: Dimension MeasurementMeasuring deformation of metal materials
Task: CountingCounting bearing balls
Task: PositioningChecking fit of body panels
-
Food, Pharmaceutical and Other Industries Keyence
Task: Part IdentificationInspection of different types of medicine capsules
Task: Defect InspectionInspection of pinholes and foreign materials on a sheet
Task: Part IdentificationInspection of plastic cups and printing
Task: Presence/Absence detectionInspecting for molded products remaining in a mold
-
Food, Pharmaceutical and Other Industries Keyence
Task: Defect InspectionInspection of stains on the bottom of beverage cans
Task: Presence/Absence detectionDetecting the presence/absence of package inserts and missing items
Task: PositioningChecking mis-positioned labels
Task: Dimension MeasurementPitch measurement of construction boards
-
Food, Pharmaceutical and Other Industries Keyence
Task: CountingCounting items in a carton
Task: Dimension MeasurementMeasuring the thickness of building materials
Task: CountingCounting beverage cans
Task: PositioningDetecting liquid level in a bottle
Slide 1Slide 2Slide 3Slide 4Slide 5Slide 6Slide 7Slide 8Slide 9Slide 10Slide 11Slide 12Slide 13Slide 14Slide 15Slide 16Slide 17Slide 18Slide 19Slide 20Slide 21Slide 22Slide 23Slide 24Slide 25Slide 26Slide 27Slide 28Slide 29Slide 30Slide 31Slide 32Slide 33Slide 34Slide 35Slide 36Slide 37Slide 38Slide 39Slide 40Slide 41Slide 42Slide 43Slide 44Slide 45Slide 46Slide 47Slide 48