U. S. COAST GUARD Eighth Coast Guard District RADM Roy Nash.

AO0AC84 056 COAST GUARD WASHINGTON OC F/G S/5
IN .AN APPLICATION OF INERTIAL SURVEYING FOR THE COAST GUARD. (U)JAN 80 J J ANTHONY
UNCLASSIFIED USCG-O-1-8O
Eli

I jjI
-11125IIj'~ AB1.
MroofY H~l So IO 1 S) C IAHIN- I ' A , V 1 I % : 0

Report No. C6-D-1-80 LE E
AN APPLICATION OF INERTIAL SURVEYING
SFOR THE COAST GUARD
I 0-tJanuary 1980FINAL REPORT
Document is available to the public through theNational Technical Information Service, DTIC
Springfild, Virginia 22151 SELECTE fMAY 3 0 1980 J
Prepared for A
U.S. DEPARTMENT OF TRANSPORTATION-. United States Coast Guard
Office of Research and DevelopmentWashington, D.C. 20590
80 5 27 119

NOTICE
This document is disseminaed under te sponmship of the Depwmentof Trnpttion inhe interest of Information exdohng The UnitedStats Government assumes no liability for its contents or use theref.
The contents of this report do not necuw ilv rflec the official viewor policy of the Coast Gurd; and they do not constitute a todadspecification, or regultion.
This report, or portions therof may not be used for advertising orsales promotion purposes. Citation of trade names and manufacturersdoes not constitute endorsement or approval of such products.
I

J Sia-t a'
Is 2"11
aal

Technical Repee Documeatetion Pege
U.S.D r 2. f rovernment Accession Me. 3. Roip-ent', Co l No.
12 en..n gec Nm wdAd.,Wahigton, D..8093G1X-
and Suppme ey N1
,N PLICATION OF INERTIAL SURVEYING FOR THE c,W".AS JRD,
" .- ... .. .... ... 8. Porfem,09 Owleeni owiee Report No.
7_4N' j oh -n . d'Anthony ,
U.S. Department of Transportation 702702.3
UnitedStates Coast Guard ti. SCu y an te U a.COffice of Research and Development adr s thooavespurrdPot C.ed
Commandant (G-DST-I) t Final oit
U.S. Coast Guard te cai d
Washington, D.C. 20593 c p b fepson ing over large
15. Suppe4mentary Mote,*
Inertial survey of Tampa Bay aids-to-navigation conducted jointly by Nationalti Geodetic Survey and the U.S. Coast Guard.
\ 4. Abotrect
Technological advances in both hardware and processor technology have spurred theadaptation of aircraft type inertial navigation systems to a sophisticated yetutterly practical o for conducting surveys. The system, carried aboard a landvehicle or helicopter, is capable of rapidly performing p~osition fixing over large
areas in a minimum amunt of tim while providing survey grade output in real time.While inertial survey systems are being conow. cially exploited for land survey work,this paper describes a successful over the water application for surveying CoastGuard fixed aids to navigation. Included are descriptions of the equipment and itsdeployment along with recommendations for its use within the Coast Guard. Survey-ing experience with an inertial survey system suggests that it could be a costeffective tool for surveying many fixed aids over a large area.
17. Nor words Is. Dis ibutimn Staemmn
Surveying, Inertial Survey, Aids to Document is available to the public
Navigation, Positioning/Survey Systems, through the National TechnicalGeodetic Surveying, Offshore Survey. Information Service, Springfield, VA
22161.
19. Se rrty Clessif. (of hi, e9ot) 20. Soeuriy Clesif. (*I this polo) 21. No. of poes 2L Priee
UNCLASSIFIED UNCLASSIFIED
form DOT F 1700.7 (6-72) Repodetioe of Compleed pege somuesed

CL~ ItL C Ct. Cti t! IcCi L L t t L: [ S S.I i- V
L t IL~ l.L LL . .i..V1. C . Li ~ ~ -~ L I t.. . 34
ij t -C rur:li;C j.>s1tlc, tixuilc; L.'t I r.r i~t - Ik. , I f I ' t LT
~~r' 5y U . I L t tf. L~~ cil L. i It. H-0 It Zc.~~
tht e-Cuipktuit ~TC its Ct .~cyri:r.t Cf IC L:. !'U..CI;" .tI. 3 CfS TO It-, L.Siti4r V't. LCct u.I"'tcrrc. Surv Cf lter C iui iu r, rt! I SOV~
-.t~r, Si, ilC iV.. S LS ti it CL~l tu L .C b t t. t.t TLt I. \& .iC

TABLE OF CONTENTS
Ack now 1 edgements iii
I. Introduction 1
If. Background 3
III. The Deployment in Tampa Bay 6
IV. Theory of Inertial Systems 11
V. Technical Description of the ISS Equipment 12
A. Auto-SurveyorTM and SpanmarkTM Inertial Survey Systems 12
B. Error Sources 14
C. Prevention of Uncompensated Error 15
VI. Analysis of the Utility of the ISS for the Coast Guard 18
VII. Conclusions 24
VIII. Recommendations 25
References 26
Appendix A - Span International, Inc. Inertial Survey System
Appendix B - Guidelines for Accurate Inertial Surveys
Appendix C - Positions of Fixed Aids to Navigation as Determinedby the Inertial Surveying System
Appendix D - Field Preparation for an Inertial Survey
.......... ............
.................................

ACKNOWLEDGEMENTS
The author wishes to extend his most gracious thanks to the followingindividuals and organizations who either participated in or generouslyprovided much needed assistance to this demonstration. Without theirsupport, smooth and successful accomplishment of R&D goals would havebeen impossible.
U.S. Department of ComerceNational Oceanic and Atmospheric AdministrationNational Ocean Survey/National Geodetic SurveyRockville, MD 20852
Span International, Inc.Scottsdale, AZ
U.S. Coast Guard Air Station ClearwaterClearwater, FL
U.S. Coast Guard Base St. PetersburgSt. Petersburg, FL
Pinellas County EngineersClearwater, FL
Hillsborough County Mapping and Survey DivisionTampa, FL
LCDR Lewis A. Lapine, NOAA
CW04 Robert Couchman, USCG R&D Center
Mr. Harry Romine, NGS Geodetic Advisor for Florida
. .. .

AN APPLICATION OF INERTIAL SURVEYING FOR THE COAST GUARD
I. Introduction
As marine traffic densities in our harbors and coastal watersincrease both in numbers and tonnage, the Coast Guard has become moresensitive to the overall status and adequacy of its aids to navigationsystem. To provide the best service possible to the modern day mariner,materials and techniques which were once sufficient for smaller, slowermoving traffic must now be improved. One particular area that has attimes painfully come to the service's attention is the accuracy and pre-cision to which visual aids to navigation are placed and have their posi-tions reported. Evidence is available to suggest that improvements inthe current methods of aid position reporting are necessary to both en-hance information control of the system and improve the precision ofnavigation in general. As a result, there are now ongoing efforts by theoperational Coast Guard to improve current positioning techniques and byresearch and development (R&D) to evaluate new technologies that showpromise of assisting this endeavor.
Over 90% of Coast Guard floating aids are placed using resectiontechniques, that is, defining lines of position by measuring the horizon-tal angles between pairs of objects with known positions. Obviously, theaccuracy of the known positions is critical to the resultant accuracy ofthe floating aids. Historically, buoy tender personnel have used objectswhose positions appear on nautical charts and then determined the LOPsgraphically with a three arm protractor. Modern methods employ analytictechniques that compute the value of the angles given only the geographicpositions of the objects and observer. Such a scheme permits selectionfrom many more objects that those charted, a necessary prerequisite topermit selection of LOPs with good crossing angles. Since a great manyof the objects whose use is desirable are not certified to third ordersurveying standards (considered essential for obtaining good positions)in published horizontal control data, it becomes desirable to surveyobjects for aid positioning alone. In addition, the Coast Guard desiresto determine the positions of as many of its fixed aids to navigation aspossible to third order standards, both for the purposes of accuratereporting to the public and for similar use in placement of floatingaids. Both of these tasks will require a tremendous amount of surveying.
The Coast Guard, however, lacks resident surveying expertise and mustseek alternative means to conduct these surveys. While development ofin-house talent is being considered, such a course of action will be veryexpensive, in both money and manpower, and would therefore be pursuedonly in the event other options could not provide a solution to theneeds. The advantages of resident talent include quick response, goodcontrol over surveying operations and prompt reporting of the results.Other means to perform the surveying would be to contract commercialfirms or utilize the services of the National Ocean Survey (NOS) whenevertheir schedule permits. Unfortunately, commercial surveying is relative-ly expensive and one always assumes a risk of less than satisfactory

results, especially when unfamiliar with the professional capability ofthe surveyor; Government surveyors may be utilized in lieu of commercial,but the survey may not be accomplished as quickly as desired. In short,it appears difficult to obtain the advantages of resident talent withoutsome compromise.
Investigations by Coast Guard R&D have disclosed a new and excitingapplication of inertial navigation technology for surveying that haspotential utility for Coast Guard requirements. Inertial navigation, asit is applied in aircraft equipment, is based upon frequent sampling ofthe output of horizontally mounted accelerometers to obtain the distancemoved. Accelerometer platforms are stabilized with vertical seekinggyros so that distances are accumulated in the north-south and east-westdirections only. Extension of this equipment to surveying reqires moreprecise computation and more frequent updating to minimize error accumu-lation, but the principle is exactly the same. The resulting hardware,termed an inertial surveying system (ISS), can perform a survey taskautomatically, thereby minimizing the opportunity for human error toaffect the results. The system is normally mounted in a vehicle (landbased or helicopter) and transported to the locations to be surveyed.Using known endpoints, e.g., geodetic control stations, and appropriateprocedures, any number of new stations may be surveyed in between. Thirdorder accuracies or better appear achievable under most modes of opera-tion. The speed at which a survey can take place is limited only by thespeed of the host vehicle. Due to the advantages of such a system, in-cluding the tremendous distances and number of stations which may becovered while employing just a few operators, the ISS is being activelypursued by the community of surveyors, including NOS. Though these ad-vantages are partially offset by the requirement for a competent surveyparty chief of considerable expertise, minimizing the traditional heavyreliance on numerous survey party members is a distinct advantage for aCoast Guard that lacks type of manpower. Technically, the system is aknown quantity; its capabilities and limitations well documented. It hasnot, however, received any use in an over the water survey so the successof such an application was uncertain. Since any potential utility in theCoast Guard would require this type of operation, it became desirable totest deploy it operationally.
This concept of airborne inertial surveying was thus demonstrated inTampa Bay, Florida, in determining the positions of several fixed rangemarkers. Coast Guard R&D, in conjunction with the National Geodetic Sur-vey (NGS) of NOS arranged and conducted the system's deployment, and pre-pared this report which includes an analysis of the prospective use ofthe system for Coast Guard needs.
2

II. Background
The idea of applying inertial navigation technology to surveying isnot new. Preliminary attempts in the 1960's met with limited success dueprimarily to the inability of the computing equipment associated with theinertial navigation hardware to withstand shock and vibration during use(1). Precursor to the present day inertial survey systems was a Postion-Ing and Azimuth Determining System (PADS) developed by Litton and theU. S. Army Engineer Topographic Laboratories between 1965 and 1972. Thisincluded the installation of a vertically mounted accelerometer in thebasic inertial hardware, making elevation measurements possible. Thisfirst successful development provided position and elevation accuraciesto within 20 and 10 meters, respectively. Additionally, its ability tobe used during day or night, in any weather plus rapid transit over longdistances made it immediately unique among all other positioning systems.
Subsequent modifications included a post mission smoothing program,installation of a more sensitive vertical accelerometer and additionalmodifications in the Kalman filters. Accuracies improved to better thanfive and two meters for position and elevation, respectively (1). Thisequipment then became the basis for the present Litton Auto-Surveyor.TM
Since 1975, Canadian surveyors have increasingly turned to inertialsystems to conduct their survey work. After gaining some experience inits deployment, they quickly realized its tremendous advantages for rapidlong range surveying and opted to purchase a system of their own. Someexcellent articles describing their operational and experimental use ofthe equipment appear in papers by Carriere, Beattie and Babbage (2,3,4).
Besides the U.S. Army, the ISS has now sparked interest among commer-cial concerns and the National Ocean Survey (NOS). The first major sur-veying task undertaken by NOS using the system was a 300 mile traversealong the coast of Louisiana, setting stations for later use in offshorehydrographic work. The ISS at this time appears to be capable of second-order horizonal control closures as specified in the FGCC "ClassificationStandards of Accuracy, and General Specifications of Geodetic ControlSurveys". Appropriate procedures to follow to achieve this are currentlyunder development for official dissemination.
Previous Coast Guard testing of the ISS was performed by the R&D Cen-ter in Casa Grande, Arizona, in January, 1979. At that time, the systemwas being considered as a means to conduct a survey of the Loran C gridin certain locations of the U. S., notably, the Chesapeake Bay. Longperiods (10 - 15 min.) on station while hovering over water make a LoranC survey considerably different from a more "conventional" inertial sur-vey where on station stops are as short as 30 seconds. Testing was con-fined to the determination of error accumulation over time and that re-sulting from significant deviations from a straight flight path. Noattempt was made to deploy the equipment on an operational mission assubsequent analysis of the data would dictate how such a mission shouldbe planned. Details of this data, in a report format, are available inreference (5).
3

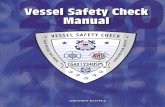
Deploying an ISS for aid to navigation surveys or object positiondetermination represents a more conventional use of the equipment. Ahelicopter based system used in the air mode (see Section V) is the onlypractical method for surveying objects since they are above ground orover water and may not be accessible by land vehicle. Indeed, for appli-cations over large areas, the helicopter has been determined to be themost cost effective tool (2). The aids selected for survey in Tampa Bayreside within 150 sq. mi. (see figure 1) and the long stretches of waterafforded an ideal environment in which to apply the air mode of survey-ing. A first check of the horizontal control in the area showed enoughdensity of control that the whole concept of surveying in the areaappeared quite feasible. On this basis then, the machinery to executethe survey was set into motion.
4
" Ll'

T AM PA
C 7
bu. I. .r
4,4
FIUR I FIE AD T E UVEE
IN TWA SAY

III. The Deployment in Tampa Bay
Any successful surveying project requires the advice and direction ofa professional surveyor. In keeping with this precept, Span Internation-al, Inc., the only U. S. lessor of an inertial surveying system, requiresin their contract for leasing the SpanmarkTM ISS, "The User will pro-vide a qualified surveyor to be in professional charge of the survey..."(Appendix A). Lacking this kind of talent within the Coast Guard, it wasfortuitous that the National Geodetic Survey (NGS) was planning a missionof their own in the near time frame. Their contract with Span Interna-tional, Inc.,* provided for 14 days of operation to conduct a 300 miletraverse along the Gulf coast of Louisiana. Following an evaluation ofthe survey jobs, it was plain there would be time available within the 14days to perform the work in Tampa Bay. On this time permitting basisthen, NGS included our work as part of their contract.
Having the expertise at NGS available to the Coast Guard for thisdeployment permitted the entire effort to take place more smoothly thanwould have been possible otherwise. The body of professional knowledgeat NGS is immense, and was informally accessed at various times for pub-lications, advice, direction and feedback on the Coast Guard planning ofthe mission.
A cursory examination of the most recent (1962) Geodetic ControlDiagram (figure 2) revealed horizontal control stations with promisingaccess by helicopter near the range markers. More up to date listings ofthe first, second, and third order control for the area with their asso-ciated descriptions were then obtained from NGS. Scrutinizing thisinformation both eliminated some candidate sites which are now no longerin existence and added some new locations not pictured on the controldiagrams. A list of candidate sites was then prepared for recovery.
Recovery of the horizontal control in the area surrounding Tampa Bayand reconnaissance to determine operational feasibility of landing ahelicopter was performed by the Coast Guard. Additional support for thisoperation was received from Coast Guard Base St. Petersburg, which sup-plied a small boat with crew on two occasions; CG Air Station Clearwater,which provided fuel and parking for the NOAA-owned helicopter; PinellasCounty Engineers, who provided maps and voluntarily flagged control sta-tions for aerial observation and Hillsborough County Mapping and SurveyDivision, who assisted in the recovery of a control station that had pooraccessibility. Pre-positioned offsets from a station, necessary at somelocations to permit helicopter landing (see air mode of operation), weresurveyed by the Coast Guard.
Following this preparation by the Coast Guard, NGS, who had recentlyacquired some expertise in the planning of these inertial surveys fortheir own work, helped to map out the legs to travel. This was done in
* Note: At this writing, Span International, Inc. is the only lessor in
the U.S. that provides an ISS and associated services. Details of the
contract appear in Appendix A.6

* -2;
L'.IL- ;33w 2 ow-
'pg * >~w-
6 ASPM o
4"a- se- a * a
*~~5 -- ----- o u --
S. --- A 3
3 1 *# I~
Sothes - -
-AAMAR
Sgt Pe-rbrg8 Ci
PASTEK 2t t e-
pass Bes Wamft. 06Y41 I*
Mo~m. Spec * cF is
fieftraho
IFf
WIDLF UWEF 1 It %.
-IM -(f [Ri k" r

accordance to the guidelines of experienced users (6, 7) and the contrac-tor's own recommendations. These criteria are sunmarized in Appendix B.An initial plan included eight legs, some 230 miles of flying and threefuelings. Additional preparation on scene resulted in a more efficientmission consisting of only five survey legs and an additional calibrationrun. The mission as planned is shown in figure 3. Establishment of anew position on Picnic Island in the course of running route B providesthe endpoint for route C.
The traverse legs were designed to be as straight as possible. Aspointed out in the literature, keeping cross track deviations betweenendpoints less than 1/12 of the straight line distance will yield themost accurate results. In doing so, at NGS' recommendation, aid number13 had to be deleted from the survey as there was no track close enoughto cover it. It is now believed it too could have been surveyed, butthere was risk the smoothed results for that track (D) may have slippedbelow third order standards. Each leg was to be flown in the forward andreverse direction to reduce the effect of systematic errors.
The ISS smoothing programs compute the precision of the determinedposition as it relates to the endpoints of the track, but there is nomeans to confidently express this in terms of how the position determinedby the ISS compares to a position determined with conventional equipmentand procedures. To permit some amount of comparison, an additional aidwas added to track A, number 1A. Published horizontal control data al-ready existed for this positioi; how close the ISS came to predicting itsposition would provide a good indication of overall survey quality. Inaddition, the R&D Center surveyed aid number 11A by intersection so thatits position could similarly be compared.
Upon completion of their surveying operations in Louisiana, NGS flewthe helicopter and ISS to Tampa. From there, NGS and the CG conducted apre-survey aerial reconnaisance of the area, landing at all the updatestations (endpoints), identifying ZUPT (zero velocity update) locations(see Section V), and hovering at the range marks to be surveyed. Thispreliminary flight is most important as it familiarizes the pilot andsurveyor with the area, minimizing confusion at the time of the mission.Upon arrival of the personnel from Span International, Inc., the entiresurvey was carried out the following day.
All normal procedures for a typical ISS operation were followed.Alignment proceeded without incident in the morning, and the N-S, E-Wcalibration runs were performed. Execution of the survey continued alongthe planned routes A and B until six aids had been marked and a new geo-graphic position on Picnic Island (the update station for route C) hadbeen established. In the midst of running the next legs, the ISS comput-er detected an overtemperature condition and halted data collection,which necessitated a complete system realignment. Operations then con-tinued along leg C to mark aids #1 and #2. Only legs D and E remainedbut while traversing leg D, the helicopter developed a mechanical diffi-culty in the tail rotor transmission that forced an emergency landing andprecluded completion of the mission.
8

a .
A. AM PA-
C, an
jig-
FIGURE_ 3 NRILSRVYFIH AH

It should be noted that while a failure of the ISS and a helicopterfailure are both rare events, for each to occur in the same day on thesame job is highly unlikely. This demonstration was planned to be con-ducted in a short time frame not to be too influenced by such events.Fortunately, a good portion of the survey was successfully completedbefore involuntary abortion of the mission.
Most of the post mission smoothing of the survey data could be com-pleted on scene with Span's computer. The surveyed positions for therange markers appeared to meet the criteria for a third order class Isurvey (1:10,000) which is a good sign of consistent data. Followingfurther analysis by Span, NGS received the final positions a week later.For reasons of safety, the helicopter could not hover directly over theexact center of each range light. Instead, a convenient corner of theaid was selected for positioning and it was that point which the ISS sur-veyed. Following the helicopter work, each aid was occupied to measurethe vector offset from the corner to the light. Forward geodetic compu-tation was then performed on the smoothed positions from Span to correctfor the offset. Following final adjustment to the North American Datumof 1927, these positions may be incorporated into NGS published horizon-tal control data. For information purposes only, Appendix C lists thepreliminary, and as yet unspecified and unadjusted, positions.
10

IV. Theory of Inertial Systems
The heart of an inertial navigation system is a platform that isstable in some reference frame be it space, surface of the earth or someother. The platform is stable due to the action of at least two ortho-gonally positioned gyroscopes, stabilizing four degrees of freedom (oneis redundant as the platform has only three). In a system oriented aboutthe surface of the earth, one gyro is usually vertical seeking, whichprovides for local platform leveling, while the other is north seekingand provides horizontal stability. In space oriented systems, one gyroremains aligned with the axis of the celestial sphere (i.e., pointedtoward Polaris). As the earth spins, the vertical seeking gyro in earthoriented systems, while stable in space, will deviate with respect to thereference frame. To maintain proper alignment, the gyro is continuouslytorqued to induce precession in the correct direction with the requiredtorque being computed from the earth rate. Torquing of the gyro in aspace oriented system is of course not required.
Three accelerometers, all mutually orthogonal, are mounted on theplatform. These are nothing more than precision pendulums that candetect accelerations as small as one micro-g. Periodic sampling of theaccelerometer output is continuously integrated twice to yield cumulativedistance in the direction of the accelerometer's axis. After conversionto distances in latitude and longitude, these position coordinates of theunit are displayed on a display unit. Updating of the display takesplace as often as accelerometer interrogations.
The differences in an inertial survey system and a navigation systemare mostly improvements in precision, obtained by using higher qualitygyros, higher resolution accelerometers and smaller time intervals be-tween accelerometer sampling combined with predictive computer routines.While this will radically improve the raw measurement being taken in asurvey, only with post-mission smoothing and analysis can the equipmentbegin to produce results that achieve the standards of precision requiredin geodetic control work (i.e., better than 1:10,000).
11

V. Technical Description of the ISS Equipment
The best descriptions of ISS equipment, including the preferredmethods for deployment, appear in a collection of papers given at the 1stInternational Symposium on Inertial Technology for Surveying and Geodesyin Ottawa, Canada, during 12-14 October 1977 (8). The state of the arthas advanced considerably since then with the rapidly growing acceptanceof the equipment and its adoption by numerous surveying concerns. Thishas given use to a great many improvements, mostly in system software,that considerably enhance the basic inertial unit. Some of these arereported in the above reference; others will be the subject of futuresymposiums. This section summarizes the descriptions contained in refer-ences 7 and 9 of the equipment used in this operation. It then launchesinto a discussion of error sources of the equipment and its use, erroraccumulation and the rectification of the errors.
A. Auto-SurveyorTM and SpanmarkTM Inertial Survey Systems
The most w/dely used ISS at the present time is the LittonAuto-SurveyorN. This is actually a twice modified version of theLN-15 inertial navigation system (INS), vertical seeking two dimensionalaircraft instrument. The two modifications consist of:
(1) conversion to three dimensions with the addition of a highlyaccurate vertically mounted accelerometer, and
(2) inclusion in the computer of more sophisticated software optimalestimation techniques.
The resulting system is thus capable of performing both horizontal andvertical position determinations with an accuracy compatible with geodet-ic standards.
Components making up the complete system are an Inertial MeasuringUnit (IMU), Data Processing Unit (DPU), Power Supply Unit (PSU), Controland Display Unit (CDU), and a digital data storage device. This completepackage can be installed in a ground vehicle or medium sized helicoptercapable of supplying 60 amp, 24 VDC electrical power.
The IMU contains all the inertial hardware, mounted on gimbals withinthe case. Electronic assemblies external to the gimbals control internaltemperature, deliver precise power and process the signals received fromthe accelerometers. Resolvers on the three axes of the gimbal set sendinformation on azimuth, roll and pitch of the instruments with respect tothe IMU case. Drift rate of the gyros is less than O.OOl0 /hr, thehorizontal accelerometers have bias errors less than 5 mlcro-g's and thevertical accelerometer has a bias of less than 1 micro-g.
All computations are performed In the OPU, a digital computer with12K of memory. This computer performs all analog to digital conversionsand provides real time survey information to the operator. Software
12
-,-

routines include testing for reasonableness of data, control of systemerrors, inertial alignment and calibration and inertial data smoothing atthe close of a traverse.
The operator interfaces with the system through the CDU. This dis-plays current position and system status. Position update coordinates,inertial alignment, and surveyed marks are all input through the CDU.Normally mounted near the operator, it also informs the user when he isrequired to perform a specific operation, such as a ZUPT.
The PSU is essentially a power distribution box that receives vehiclepower and provides 24 VDC to the batteries and all other components.Precision voltages, when required, are generated at the unit using thepower.
A cassette tape records all the survey data marked during a traverse,the inputed update points and the smoothed date computed in the DPU atthe time of an update. This tape may be used in post mission smoothingprograms that perform the final position determination.
Span International, Inc. has reconfigured and modified the basicAuto-SurveyorTl described above to further enhance its use in a practi-cal survey environment. Software changes now permit more stations (up to140) to be surveyed along a track, selectable time intervals betweenZUPTs, selectable error tolerances during a ZUPT, and more versatility inthe placement of fixed offsets from the IMU. Perhaps the modificationwith the greatest impact is the installation of a laser ranging instru-ment on the IMU. With this feature it is possible to determine the off-set to any nearby point by aiming the instrument at a reflector mountedat the point. Thus the survey vehicle need not position itself or theinertial system directly on the point whenever it has poor accessibili-ty. The range from the laser ranging equipment, universally referred toas an electronic distance measuring distance measuring instrument (EDMI),and the azimuth from the IMU are manually input to the DPU where it isprocessed to mathematically move the IMU to the marked position.
The SpanmarkTM may be used in one of two modes, ground or air.Though the inertial components perform the same in either instance, thesoftware routines are considerably different. In the ground mode, allalignment, position updates, position marks and ZUPTs are performed onthe ground, either in a land vehicle or a landed helicopter. The lasergeodimeter may be used at various distances to 100 meters (subject to thevibrational stability of the vehicle) whenever the vehicle cannot bepositioned at the station. The allowable movement during a mark, updateor ZUPT will be very small and the software "window" for movement can beset at less than 0.005 feet.
When positions are to be surveyed in locations that do not permit ahelicopter landing, the air mode is used. Normally, a hover sight isinstalled on the helicopter directly beneath the pilot so he may orientthe aircraft in a hover directly above the position being marked where a
13

succession of three readings are taken before the traverse is continued.ZUPTs may also be performed in a hover, but the software "windows" allow0.01 feet or more of movement since the aircraft cannot be as stationaryas when landed. Because obtaining positions in the air by sighting re-sumes no offset, air mode software routines in the present Spanmark TIdo not permit use of an EDMI. Furthermore, inclusion of this capabilitywould require compromise of other features due to the limited storagecapacity in the on line computer. Thus, when positions are surveyed onthe ground while in the air mode, the system reference point must beplaced directly over the position.
Since many survey points and control stations are not directly acces-sible by helicopter, new positions in clearer areas must be offset fromthe desired point prior to the helicopter flight. If the location is anupdate point, prior computation of the position's coordinates is neces-sary so they may be input to the CDU at the time of the survey. Thoughincorporating EDMI routines in the air mode software is not an impossibletask, the number of instances when it would be required is small andtherefore Span sees no economic incentive to develop it at the present.
B. Error Sources
Three types of errors exist in an ISS--equipment biases, systematicerrors due to operation and noise.
The first two types are normally treated as systematic errors and arecorrected in combination. Contributing to these errors are:
1. initial velocity error, may typically be 0.001 fps
2. gyro (platform) drift rate, 0.0010 /hr
3. accelerometer measurement error
(a) bias error
(b) scale factor
(c) misalignment of accelerometer axis
4. environmental effects
(a) temperature
(b) magnetic anomalies
(c) vibration disturbances
Error growth for each of these sources is linear and can be correctedwith suitable linear models. But since their effect is twice integratedfor distance measurements, error growth is nonlinear and if allowed to
14
........

persist along a traverse, will soon take on characteristics resembling anexponential as shown in figure 4a. In the first three to four minuteshowever, the growth is linear, predictable and capable of correction bythe algorithms describing the linear model. Thus the system is periodi-cally stopped every three to four minutes for what is a zero velocityupdate (ZUPT). These stops require anywhere from 20 to 60 seconds duringwhich the system is informed it is stationary. The Kalman filter thenproceeds to estimate the error accumulated over the time interval sincethe last ZUPT, corrects for it and stores the system's position. Relev-eling and realignment of the inertial platform takes place during thestop so that the system essentially makes a fresh start when movementrecommences. Starting the traverse from a known position A in figure 4b,ZUPTs are continually performed along the route until the system reachesanother known geographic position, 2, at which time it performs a posi-tion update.
Despite the corrections for error that have taken place along thetraverse, the actual position will probably differ from the predictedposition as shown in figure 4c. This is a result of very slight inac-curacies of the linear model and differences between the predicted com-ponents of gravity, magnetism, temperature and earth rate and their actu-al values. Given the actual position, the computer distributes thisdifference along the traverse similar to figure 4d. Now the same tra-verse is executed in the reverse direction, including ZUPT until the sys-tem's position is updated once again at point A. The distribution oferror will now have a similar shape to that resulting from the forwardtraverse only on the opposite side (figure 4e). Post mission processingof this data will average the error distributions and compute the vehi-cle's track, which should be identical to the actual. Given symmetricaldistributions, it will be.
No computation can be performed to indicate just how symmetrical thedistributions are. Good symmetry results from good survey proceduresincluding well placed ZUPT stations, accurate update positions and equaltimes to traverse forward and reverse. Position error, after correction,of the surveyed stations along the traverse that remains uncorrelatedwith error of other positions, is the result of noise. While this cannotbe rectified through any software filtering, its impact can be reduced byknowing what causes it and how it grows. The reader is referred to agood discussion of the subject by Huddle in reference 9. Suffice it tosay here that the small residual errors due to noise appear to grow asthe square root of the number of stops along a traverse. Much of thiscan then generally be corrected in post mission smoothing.
C. Prevention of Uncompensated Error
In light of the high accuracies achievable with an ISS and the em-ployment of sophisticated error minimization schemes, far more criticalto the success of a survey is close adherence to proper procedures on thepart of the user. The following four major areas of carelessness or poor
15

IA.b-
I TIME-2
TIM
-~
2
T I N 6
d.
TIM
2
FIGURE 4 RAW AND SMOOTHED ERROR DISTRIBUTIONS ALONG A TRAVERSE
16

planning will result in something less than optimum positions. Wickam(7) provides a very complete listing of these and other less criticalconsiderations.
(1) Excessive deviation from a straight line track - Though theKalman filter and frequent accelerometer sampling intervals (every 16milliseconds) provide superior position prediction, the gyros and accel-erometers are sensitive to changes in the temperature and magnetic gradi-ents. Over a straight line traverse these effects are linear enough tonot be a significant contributor to error. Cross track deviations ofmore than one-third of the along track distance may subject the equipmentto different gradients that affect the precision performance of the in-ternal components. As reported by Hadfield (11), future generations ofinertial surveying systems using more sensitive accelerometers and gyroscombined with extensive shielding may eliminate the need to adhere to astraight line. In the meantime, any surveys performed with the Spanmarkshould be planned with the goal of keeping cross track deviations lessthan 1/12 of the along track distance.
(2) Poor geodetic control - Since any survey will only be as good asits control, only those stations with verified positions should be uti-lized. Ideally, the order of the station should be one better than theorder of the survey. Equally important is to position the survey vehicleprecisely on the center of the station. Since control stations are usedfor position update, error arising from their use propagates throughoutthe entire traverse.
(3) Excessively long intervals between ZUPTs - After 3 to 5 minutes,position error accumulation becomes nonlinear and cannot be completelyremoved with the linear models. Thus a small uncorrected position willremain in the system after a ZUPT that was performed past the time limit.The effect on the survey is equivalent to using an update control stationwith poorly reported position.
(4) Improper execution of ZUPTs - Since the purpose of the ZUPT isto place the system in a stable environment, any movement (velocity) thatoccurs during a ZUPT will permit the system to realign to a moving refer-ence frame. Since it was told the frame was stationary, the small velo-city error will remain uncompensated in the system until the next ZUPT.
17

VI. Analysis of the Utility of the ISS for the Coast Guard
The distinct advantage that the ISS has over more conventional tech-niques is the large amount of surveying that can be accomplished in ashort period of time. In the case of the survey in Tampa Bay, thisamounted to four hours of flying time plus an hour of aerial reconnais-sance. In that time, the positions of eight aids and one location onshore were determined. Depending on the efficiency of the flying unitsand the density of the points to be surveyed, surveying 20 aids in a dayis a good estimate. Using conventional methods on a similar number wouldrequire from one to three weeks. The benefit of time savings with an ISScannot be disputed.
The advantages of time and large coverage area are balanced by highcost and extensive pre-mission planning. Since the surveying takes placeso fast, all supporting functions must execute like clockwork. Thisdemands that the person in charge have complete knowledge of the area,have made a pre-survey reconnaissance of the routes and positions, andtended to all the many logistical considerations such as timely refuelingof the helicopter. Extensive planning is always a prerequisite for anysuccessful survey, but never is it more critical than with an inertialsurvey. Neglect of even minor details can ground the system for hours,incurring large expenses in the process. Carriere (2) states, "The costper (surveyed) station.... traversed will be inversely proportional tothe time taken to properly prepare a project," which is in consonancewith the experience of other users. The contractor will provide all thetechnical assistance that may be needed, but generally will not assist inthe planning. It is highly recommended then that the surveyor in chargeof the operation familiarize himself with available literature or havehad previous experience with inertial surveying. A short guide to someimportant field preparation considerations is provided in Appendix D.
The Coast Guard must weigh its requirements for accurate aid survey-ing against the cost, time, and benefits achieved in such surveys. Ashort cost analysis is presented here to place the ISS in perspectivewith more conventional methods. Economic considerations alone will gen-erally determine how a survey will be conducted. The reader, however,must appreciate the fact that each survey has its own peculiarities, andsuch items as availability of control, access by land vehicle for recove-ry, the extent of the area to be surveyed, and weather/environment con-siderations may favor one method over another, regardless of the cost.Additional recommendations are included in section VIII.
ISS - Initial costs to lease an ISS are high as they must pay for alltransprtation, installation, initial testing, spare parts, and otheroverhead items. Span International, Inc. charges $12,000 for its mobili-zation fee (see Appendix A). Daily operating costs are $3325 for a sevenhour period. Associated miscellaneous costs include per diem expensesfor Span employees and any necessary ground support equipment.
All helicopter costs must be borne by the user of the equipment. Afour passenger helicopter is considered ideal for equipment and passengerspace while providing good maneuverability. Desirable features of a
18

helicopter include good downward visibility, small size, 300-400 jilerange, floats for over water operations and good hovering characteris-tics. The ISS package has operated successfully in the Hughes 500 C, 0,Bell 206 B, L, Allouette Llama and Fairchild 1100, so these models arehighly recommended. The NOAA helicopter used in the Tampa Bay survey wasa Bell Model 204 E. Coast Guard helicopters at present are not veryadaptable to an inertial surveying job because of the lack of downwardvisibility, their larger size and the three point landing gear, whichpermits more vibration than simple floats or skids. Furthermore, regularoperational commitments may preclude exclusive assignment of an aircraftto the surveying mission when it is required. For these reasons, commer-cial helicopter rentals will be another necessary cost in an inertialsurvey. Typical rental fees that include pilot and fuel currentlyaverage $300 per hour of collective time; the helicopter will be flyingapproximately 60% of the time.
Table I itemizes these expected daily costs of an inertial survey.To obtain the average daily cost of an entire survey, add to this theaverage mobilization fee per day. Note that the figures include the costof the planning performed by the chief of the surveying project. Gooduse of in house manpower can be made during the planning stages whichwill cut the cost considerably. Planning for the one day Tampa Bay sur-vey was conducted by four persons with a combined work load of one manmonth. Estimate an additional man week for every additional day of sur-veying. Depending on the extent to which in house talent is used and thecharacteristics of the area being surveyed, planning costs may average$500-$000 per survey day.
Conventional - A conventional survey of aids to navigation is laborrather than equipment intensive. A commercial surveying firm bidding onan entire job would include recovering the control, targeting, performingthe survey, and reducing the data in its estimate. Depending on the sizeof the survey, two to six men might be employed. As shown in Table II,one week of surveying costs approximately $5000 in an area with adequatecontrol and good accessibility. Poor weather and visibility will hamperoutside operations about 20% of the time (depending on the area) whichmay inflate the weekly figure to $6000.
Comparison - Comparison between conventional and inertial methods canbe made on the basis of number of aids or on cost per aid. Any perform-ance may be assumed but based on the Tampa Bay survey, the ISS can rea-sonably be expected to determine 20 positions per day of operation.Based on the experience of other surveyors (2, 4), a conventional surveywill take up to ten times longer. Using these assumptions and the costfigures, figure 5 shows the direct comparison between the two methods.At 100 aids, the ISS becomes economically more attractive.
Alternatively, the cost of surveying each aid can be evaluatedagainst various deployments of the ISS. In figure 6, the unit cost ofsurveying 50 aids is shown against the time of system rental. This maybe compared to the unit cost of a conventional survey. For example, whenthe conventional unit cost is $600 per aid, the ISS is economically ad-vantageous if the mission requires no more than two days rental.
19

Item Estimated Cost($/day)
ISS Daily Use Fee $3325
Helicopter Rental (inch pilot)7 hrs @ $300/hr, 60% use$2100 X 0.60 = 1260
Chief surveyor 100
Per diem expenses 350
Miscellaneous expenses 40Ground supportTransportation
Pre-mission planning (est) 750
Post-survey computation andadjustment 1000
Documentation, publication, etc. 500
Total daily survey costs $7475
Table I - Average Daily Cost of an Inertial Survey
20

Item Estimated Cost($/week
Surveying Party - 3 man $1500
Per diem expenses 1000
Equipment 500
Transportation and miscellaneous 500
Pre-survey recovery 500
Post-survey computation and
adjustment 500
Documentation, publication, etc. 500
Total estimated weekly cost $5000
Table II - Estimated Weekly Costs of a 3-Man Surveying Party
21

70
60
50
40 ,INERTIAL
0
CA 30 -
S20 - CONVENTIONAL
10 ,
20 40 60 80 100 120 140
NUMBER OF SURVEYED AIDS
FIGURE 5 -- COST OF INERTIAL AND CONVENTIONAL
SURVEYS AS A FUNCTION OF NUMBER OF AIDS
22

2.0 -
1.5
1.0a-
0.5
I I II I I I
2 4 6 8 10 12
DAYS OF ISS RENTAL
FIGURE 6 -- UNIT COST OF 50 SURVEYED AIDS VS. DAYS OF ISS RENTAL
23

VII. Conclusions
As a result of Coast Guard research to date and the operational de-ployment in Tampa Bay, the following conclusions can be drawn about iner-tial surveying.
1. The capability to use an airborne Inertial survey system to performan over-the-water survey of fixed aids to navigation wau successfullydemonstrated in Tampa Bay.
2. Inertial surveying is extremely rapid compared to conventional sur-veying techniques. Usable (although not yet publishable) surveyed posi-tions are made available on scene or within 24 hours.
3. Though no official NGS-approved procedures exist, at this writing,the results of an inertial survey appear to be at least as good as thirdorder. Surveys must be executed in accordance with current inertial sur-veying practice. This will usually provide sufficient precision for anyCoast Guard fixed aid to navigation.
4. Because an ISS is an expensive and sophisticated apparatus and sur-veys must be conducted in a helicopter, the total cost of a given surveyis high, usually exceeding $20,000.
5. Inertial surveying technology may be successfully applied to mostCoast Guard surveying tasks whenever cost-benefit analyses are favora-ble. However, use of the system is not justifiable for a survey of asmall number of aids.
6. Inertial surveys are fast and efficient for regions containing largenumbers of aids. It would be an effective means for performing one timesurveys of fixed aids to navigation in four or five adjacent harbors.
24
A_

VIII. Recommendations
1. The Coast Guard, in light of its interests In more accurate aid posi-tioning, should become familiar with all the various methods of surveyingavailable to perform the tasks. This does not imply development of inhouse expertise in surveying but rather, a knowledge sufficient to intel-ligently contract for reliable, accurate and cost-effective surveyingservices.
2. Deployment of an ISS should not be attempted for surveys of a smallnumber (-20) of aids. The cost and planning time cannot be justifiedfor the benefits received in reduced survey time.
3. Inertial surveying should be considered another option which theCoast Guard may evaluate for its needs. It is potentially a very costeffective system to use for long range surveys with limited conventionalaccess to control stations.
4. Coast Guard districts reviewing the status of survey control of theirfixed aids may find a large number are not verified to third order.Should a large scale survey of these aids be considered, the ISS shouldbe evaluated along with other methods to accomplish the task.
25

References
1. Todd, M., "The Development of the Inertial Rapid Geodetic Survey Sys-tem at USAETL." Reference 8.
2. Carriere, R. J., Kouba, J. and Penney, R. C., "Experience with theInertial Survey System at Geodetic Survey of Canada." Reference 8.
3. Beattie, J. C. and Welter, J. F., "Alberta Energy & Natural ResourcesWhitecourt Forest Management Area Control Survey Project 1977." Refer-ence 8.
4. Babbage, G., "Operations of the Inertial Survey System: The Mana-ger's View." Reference 8.
5. Couchman, R., "Investigation and Evaluation of Inertial Survey Sys-tems for Harbor and Harbor Entrance Surveys of Loran-C Time DifferenceCoordinates," U.S. Coast Guard R&D Center Report.
6. Harris, H. C., "DMA Operations with an Inertial Positioning System(IPS)." Reference 8.
7. Wickham, J. H., "Inertial Surveying Technology in Private Practice."Reference 8.
8. First International Symposium on Inertial Technology for surveyingand Geodesy, Ottawa, Canada, 12-14 October 1977.
9. Ellms, S., "A Description of the Auto-Surveyor System and ItsSub-System Accuracies." Reference 8.
10. Huddle, J. R., "The Theoretical Principles for Design of the Iner-tial Surveyor for Position and Gravity Determinations." Reference 8.
11. Hadfield, M. J., "Critical Inertial System Characteristics for LandSurveying." Reference 8.
26

SPAN T W~RA "OALEC.
UKE AND MEV=C ASRUEEMN
ASREMENT no. -
Wr CE TO: AIRPORT OP DELIVEY:
wow. A&Wei om
all 40d @we ~ &V Cee AqwAi Ceasigo"., or User
WOVUSMI SYSTEN DUMMVEY DATE:$PAN Intornatlamol. Juc (herelfmafttetcld "SPAN'% Wo pacceptanmce eftis Agreement amid Mecopt oftm. Idobilizatio,. Fee fron,tme User. agrees to P., We a SPANNARKID System (hereinafter called "Systm-. together anth inauntenc~me. sorator sand allscadmit o Mar -piedd fat he I. under the tons and condjuns hereinafter statedTbOR ASKIERMshel h.........deaua ono thidata tme System has arried at tme Aityort otDolivery she" above.
Usest shall 3ew to SPAN a Bask Clargo hr s. DASS TZRM a talows.
Ufse Vow (Done Turn dm s @55.IS W day) ................................ 0
ICTAL BSIC OI1ARG& .......................................... I_____
Twonm days ultild by seven (7):Masmuvm Use Tie hours
Ufte SystaimIamod inmoes ef tme Mauimtum Us. Tim haestated above dunmg tme DSe Termtme User shall be in-ej-id andSPNThroe Hnmdred Sevemnty-five Della,. 4PS7) he such hor,, or fretim thmereof in excess of the Maximum. Use Tim
Unused parussm sitim Moaumu sthe D m.,, stated abiv, shall! .me be warried ever beyond the DBae Tawn.lime Dome Chrge is payable soe SPAN according to tme tsletumg schedule:
a 12.00000 Mab1611lllation, Far gaid upon SPAIVS safmlrmtatian eto delivery date.
8 - M%5 at Vi Fee) dooms, or before eimmemmot of Doe Term.
11 (41M * atU Peeld. attheamdott Saam Tornsd. DoeRus Tarm is Imertatilyfi osItshall be paidin pm"~oy 36day Installumnts with the balanca die at thme aod at thi Daim Toen,.
I - no%* @run Poe)dus, up"esubmision otme riuaw data ham time Systese toth Us Ver.
IF USER ELECTS O PAY TIS ENTRE SASICCIIASGE PRIOR TO 733 COMMZCZMZE.TOPTU MAU TZRM. USERSMALL DR GUANTCD A FIVE PERCENT tS*) DISCOUNT FROM TUC TOTAL BASIC CNARCEZ
As or prier be the somplohm fthi Daoe Two. thme System shall be retuned by User to SPAN at the Airport. of Delver w aseekother Inaons meaabit to SPAN. If the User requests the use aoth the eodo Dose Term, sub.t to SPAWS having a
aolle wVase shall M to SPAN Feur Thousand Five HudrdDol rs, U :dyfrmah asgiv Thresoap" ossat poe imurom s howaia med.~ i n at seven Mhor Tse W. day.
The bacsgadloeesmess e hpol bp UoeeSPAl In VAL Seat atlstdl.ns~~ at ehmbarplaseosmy ho designmatad by SPAN. Aditionial see Own"a or sthrer shasga p Mv hder here- wil hbieoa separstoly and shal 6*poi by Vser wihl us (W days hoi damo ativ- sim.Tetima Dask Charge stated ahiveihee. shall be added aomuqual Wtymueslan aes.1ewevor dsoslg~oat d orsbond
.jn n fee oelt6 othereatpiep~ SA to. respect e1 th bregid.em ua hewwr t
11011 AGREMENT UA0*518 TU PROYISMWSON T139 REVERS 8109 AND FOLLOWING PAGES.
A.epled by: Wow:
SPANe Il011emll. be.
rMe ___ ___ ____a
.~.- APPENDIX A bIS PAGE IS 13 >3T A IT

TBUMS AND CONDITONS
T1010 or AIIIIIUIINTThis Agreement shall become effective on the date it is accepted by SVAN and shall mauin in affect antil cancelladl or terminated asherein provided. Users obliation to pay the basic Charges. and all other charges provided for herein which shall have accrued.shaI survive any termination of this Agreement.
80LmVW -SPA% will confirm a delivery date no later then three (SI working days after reusly of the Mehilisat Fee and will povside theSystem as thep Airport of Delivery o the deslivery date ounfirsuod by SVAN. SVAN shal tot ha liable for delays in delivery 1) do@ tonow*s beyoiid its resenable control, or (2) to Acts ef God, sets of the User. sam or estrictiena of civil or militar authority.priorities. firs. stries. labor disputes, fioods. "epres war, rclas,. or civil essmeon. shortages of labor ar matarials. delay intransportation. or Other similar or dissimilar causes or (3) unavailability of information or material to he tarnished by the User.
SPAN will provide a suitable land vehicle for use with the System if the User hoe specified the System is to be operated insa landvehicle.
SITALLATIOU Oe Vai. ygel"1am sgguCOutgmSPAN shall be responsible for installation of the System in the vehicle or User-provided helicepter. SPAN ahaell provide requsiredinstallation materials, teo"s sod sboeris asesmary for isistitoi of the System in the vehicle or helicopter
SPAN will provide reasonable technical aselutanco in planning for inertial purveying and wigl provide the services stono PhojectManager. anid one or mere Field Engineers and.or Toch.,cians. who Will accempaniy the System. operate the System for the User aswell as provide field maintenance for the System and overse the System perfermance. SPAN'S Project Manager Will Sem heSPAN'S Contract Representative aid be responsible laor providing the end priduct survey data from the System to the User.Zmjhpoyesef SPAX shall be under the *Wcusive centrol and management at SPAN and shall not beonsidered employees orsWent&
DurlngthetermefthaiAgreemeitt.SPAN.at ltaevpeise.wlllcause tobe oakeall necessary edlustmenta..eplsad &Weplacement* ~~(of * prta qired tolueep the System in good warkIng order. Ifsmaintenanceven the System reduces the available work hours below
~~ an average of? Mors per day fortho Ban Term. than inthiat event SPA.'Ssehs andeaciuttru hiabilityco Usershalieearod theDose Term I day for ech 7 bouom of euch reduced availability at no additional cen to User. Such extension sHl in no way reduce
~5Usersaobligation teoy Te *asic Charge or chor charges far the son Term or pay Basic Chargessorother Charges har sbeequentperiods.
SIPSTEM OPIIIIATION AN SUPPLES-. Thne System shall be operated in accordance with SPANS operatlenial pa- adrea and this Agreement. All supplies used mn the
System will be supplied by SPAN. SPAN wil within fourteen (14) days after the conclusion of the Bose Term, proavide User withfial system travemrs esumua in berdeepy and. If railumased. magneatic taes.
SPAIVehall be responeible for transpsrtotemotthe 3ystam eid SPANI periunnel tethe Airport efDelivery woemmeseethe DasoTeen. Uponscopletion af the Dse Term. SPAN shel be mepeneible flor irsaspertbo of the System ad SPAZ.S personnel frmthe Arpeon of Delivery to SPAN.
SPAN eshag maintain0 a standard hem ASD ehsmaty Intournse PshrYeeveulnth Useco during the tem SthWS Agreementmid whIle the 07et0m is IN UsOoAl
emloees CA a PNeS
I~mc lamln andOOI amvaln areIIIII nOet
then.secure temorary suusht bglitbes andbSPasem to te S st m m atnoiift s aS time- - ,
a ddapesneneddfrtew es baduin delver, fsqmsd the Ow Tw redd and vele-e User s thlsee* ~ ~ ~ ~ o odpodhlh Indthees h heigngu wadevs mangms an saathe se ~ hal e a ienelderod aseloye %eer Pubea
agdditiona e esai do SPA d a-2A i N Nw.Ue'
S A" ~ -t-- -- --- thUmm;b.Nw W

-- M Mow-2
THIS PAGE IS BEST QUALITY PRACTICABLE3PROM GUYx FUIJA ID, TO BOG
IffUser elcts to provide the vehiceort hter. Uraall "Mnain liabilty ineurncoesrage wow to SPAN for injuriestiro s and property in enction wihIeo~n iheorge@ ne am tho n eMlenbles(I00OQprparse. PFiv~e n Dollar -I.0.0)a seidsmdon O weMln Delr(l0000 rprydmg.Such insurance shallSm SPAN, the Mlanufseturer'. And the Owan 89 le ineureds. and User SHl uon rea, deliver a certificate of ouchinsrane to SPAN which reqluireeten (10) days prhise~to to SPAN Ofcaelltormdutilao. User apees to hold harmlessend indoenift. me a surety. SPAN, the Msmufactuser.and the Owner agaist any and all clausa. liablities. or damsages includingclaims. liaite or chasgee by User for permmal ims. property damage. Ism of busies. loes of preits. last of anticipatedps"olor oenmclow solente. or othrwise.
The system iad wil weman permmal property. se Iwil deond. at ito SXonee. the title Of owner and SPAN *gRins all Person.obsivmingannt mt rathe System throgh oragainmte User. nd the User will net erwateor persot ony lienorencumbr ac upondie growem. User ehai net seiga its rights sail Wntonunder thia Agreement. norshall it sublet thse System without priorwittnapproval of SPANJ.
PUNLIwTIO 111111mUser agrees to allow SPAN to identify Users empe"mm ar and project un SPA% publications asra User of the System covered b,thin Agreement. If amacanal in written for placement. in public media, the text thereof will be amittod to User m advance for isroview and approval.
Genu"e Tome
use tow is that medoringwhich the System in hengopera to Inial surtelegeperns and Inldscelibreaten andoligmentOf te Sytembefoe suveyig im begin. Use time she" esemece at the boginsingof alignment and continue
until the lest terminal update. Use tim shell net be scumulated during the tme reqired for System maintenance.
In the event that any a o f the following evente dll orcur. 71e User lfll to make any payment at the time and in th annerhoeei contracted to be paid and continues in defand mere then five ($) days after written netiflcocion by SPAN; or. the User shall.he mere than five (SI days after SPAN shall hae d~And in writing the periforamne thereat fall or refusse tasesmply with any
ethr o te jnveena. gromet. erm, r poviwas ef this Agreement on its part tobe hept andl performed; or. a peit forrogenisation or debt adjustments is filed under the Vankruplcy Act, or under any amendment or revsown theraw e ctin the
obligations of the User under ths Agreement; or. saw procengsn are commenced by or agan the User her ay relief under anybenhruptcyAlneeleny laws. Ieo relatlngtethe rosfdebtrforadjustmnts moeto eztneaw orotherwine.or.hershell oacur any voluntery or involuntory amelnm@K or tansfer of the User's rilto neetin this Agreement, whether underthe bankrupicy lawa or by the appointment of a vmesle or trueto.. or by any Judicial! or adminisrative decree- or process orogherwlseor wthe User shall snaeraffertbe many unaUtheosed use or mblemofthe System. or. the System beli ple1e orheld for any debt or obligation owing by User. or tobs in any nmner ecmbsredor shall part with the peossie of the System.SPAN may declare the User to be in default
tuliSS UPONl h111,1S1116Inathe evn fefaeult by the User. SPAN shell havethe rightttahe mimsele p meof the System, and the User herbwaives any action forweaonsmor damagee resiltlem a paebeueeooeteSse;ad hsAreet hc hltoninate upsnthe declarationeofdofsult. ahsll insa nee etrosseds an sees ofthe User~ ondthe User shall remain and be liablehethe payment of the unpaid belanefthe rem , Baskc Chargs sad allm" unadditienall chargeforthe Sees Term and allsub unpaid eb>ias or charges shall become isdiotely due and payable or of the date of sid delaration. All remiesonferred =.T SAM under tis Agresment sha be deemend to be eumulative and so, one onctutve of the other, or ay ether
remdy enhredin any aman equity. SPAN& Noal bentitled to reeive bemsse ll &Dats sad atorneys' flows incurred inoufareig *as riglita hereunder. Additionally. SPAN shall hae all right mad rmeodie affiadsd by the laws of the Slat of AjiosusUSA.. or any jurisdiction in wIc the -Syan y ha heased.
* Ol3TUNSMALSFA.. 0 OR3 OWNIS403 APC'1J 3 LIAMITO USE OS ANTO%3 UM5 PM AXT Will.j
P033003G. DAAC Post0O Wit 10- NBGLMC3. PaImNAL ULIMS. FIROPIRMt DAMIAG. LOSS 0Or1353355.LOSS 0F n1orrMs LOSS OF ARIIAM3 PROM 0133 ECONOMIC LOSS. CUSTMEVIS Or 1153. EM0PLOVICES OrUSER on ANY DAxAGES AiInGm ouIor. CUIntCm wfE Ol u113.0 rawLIN r3013 STaflE. 01 AwrAC1v53L3Cl10f DILIVERT. POSSION.. USE. OPOIA10' NON.PS3ORMAWCK OEPICRYE PCAFORAINCI OR 0933.ATMaN NO ACT11ON. 111GArADLS or ra3903v Awe%'4 OUT or TEE w Acm.ss UNDER 1318 AGS3mm f MATISM MO11M= 3T TIME 1333303 TISANM EA) UO'U AFTR TEE CAUSE 0F ACTION OCCUSM).
IlsAreetis ne& a o"ls bts forim of ,lasreemenThe Uer aees tAt tWaAee ntI emne the ONtc
or written. oilpreviev egeltes dand O toeemncaln beweah 0t. ~hmeetI h ujc aoend may net be medifed ether tha by a wvlta insment signed by all partion offettad by ouilt medIlatie. Theetrm dmendtionsof any purchase erderoreother Inetrument (owed by User in esnesetin wit this Agreement which aft in additiotorimeonsistnt with the termi end conditions ofthAgromment shall ne be binding on SPAN or ite seignees and shall ne apyOthis Agreement. The paragraph headings used bavsn sawnsre or i cenvmeeen sad shell eatbe enoved to Usktormdfth Opes of any provilee ad this Agreerment. Um Agreement (and any awmndoent horete shell be goveroe by the lesn of theState of Arlsona. This Agreement shal be bindiaguspen the User. ito sucemsr and a spsanshlbeidnguaed ubt
User so ablutely prohibistd AN fteovi ai gemnaotts he ol &Me soe abloandinte event tat agythem oall be holdto be nvalId by MI y U esmsta 06t ti Agreemet OWa be itOIreed as N such invalnd sveame or
areetwere nt gentalnd herein. 7ibmb i f the owem In thisAgreemee. and ofetM and aIMO Its p es SPWAN maybpsela stareow nea l~~mpment04in )riihghet- ol eemUe bya~li vrabow.pw medhe
A- 3

Appendix B
Guidelines for Accurate Inertial Surveys*
The following items are listed in general order of importance forobtaining the best accuracy using the ISS. In field conditions any ofthese guidelines may be violated in a particular survey. As the surveydeviates from these guidelines, accuracy will be somewhat reduced, withthe magnitude dependent upon the severity of the deviation and the numberof times or items deviated from.
1. Control - Positional accuracy of any survey is limited to that ofthe control. The survey should be based on the highest order controlavailable, but also should be tied (but not adjusted) to all reasonablyavailable control in the imediate vicinity of the survey. This willprovide maximum correlation between the new survey and the basic controlin the area. Positive identification and proper coordinates of all con-trol used must be obtained.
2. Calibration - The system should be calibrated accurately to localsurvey control of the highest order available. The system should be re-calibrated if raw closures (before smoothing) fall to 1:10,000 betweenverified control. Gyro drift should be checked regularly and recalibrat-ed if it exceeds 6 seconds per hour.
3. Linear traverses - The results are obtained if the rate of changeof latitude and longitude are linear with respect to time. This sug-gests, as nearly as practical, minimum meander between terminal controlpoints and a uniform rate of travel. As a rule of thumb, the surveyshould stay within a diamond, the apexes of which are the two controlpoints and no point of which shall be offset from the centerline morethan 1/3 of the distance from the nearest control point. Slightly betterresults are obtained if the offset is kept to 1/12. Zero velocity up-dates should be performed uniformly with the same distance and time (butmost importantly time) between them. There should be no delays in thesurvey (see Item 4) nor any doubling back (to pick up a missed point, forinstance) if at all possible.
4. Minimum travel time - The traverses should be carefully plannedand reconnoitered so that the survey can be run with a minimum amount oftravel time between terminal control (updates); with no delays for clos-ing control or point searches, refueling, operational restrictions, orpersonal activities (lunch, break, etc.) that would make travel time non-linear. Assuming that operational precision remains constant, the maxi-mum absolute error is directly proportional to the time and distance be-tween control points. Therefore, if time and distance between controlpoints can be reduced, the absolute error will normally also be reduced.
5. Double runs - Control traverses should be run both forward andreverse during the same alignment and the two values averaged. The
*From Wickham (7)

remaining coordinate error is only approximately half that of a singletraverse because of the systematic nature of system errors. Two runs inthe same direction only slightly (20%) improve the results.
6. ZUPTS - Zero velocity updates should be performed at uniform 3 to5 minute intervals. Longer intervals generally reduce the accuracy at anincreasing rate with respect to time. Irregular intervals cause signifi-cant reduction of accuracy. In a helicopter operation, landed ZUPTS arepreferred to hovered ZUPTS whenever possible. When hovered ZUPTS must beused, it is best to follow them by landed ZUPTS as soon as practical.Hovers should be performed as low as possible, and avoided during gustywind conditions. A stabilized or ground hover improves results.
7. Alignment - The vehicle should not be subjected to any movementduring alignment. Parking on mud, snow or other yielding surfaces shouldbe avoided or if impossible to avoid, the vehicle should be parked in itsfinal position several hours in advance of beginning the alignment. Windeffects should be minimized. Park away from heavy traffic with the ve-hicle oriented parallel to the wind or protected. Helicopter bladesshould be tied down at all blade tips.
8. Helicopter pilots - The helicopter pilot must be well-trained toobtain maximum efficiency and accuracy. He must be able to place thehelicopter accurately and quickly at the desired location under all con-ditions to be expected. During hover operations, the minimum computertolerance for repeatability that the pilot's skill and the conditionswill permit should be used.
9. Pre-Survey - The system should be warmed up for 20-30 minutesprior to starting on alignment. Before starting the day's survey opera-tions, one or two short traverses should be run between two valid controlpoints. These may be as short as a mile or two in length and 15 minutesin time and serve the purpose of providing data on which the Kalman fil-ter can base future adjustment and corrections to the system.
10. Stable ZUPTS - The vehicle should be stable during zero velocityupdates. This is particularly true of the first 10 seconds of the ZUPTperiod. Do not get in or out of the vehicle during this period. Heli-copters with floats, articulated landing struts or excessive vibrationare usually unsatisfactory.
11. Minimum travel distance - The distance between points should bethe shortest available and the most direct route should be used.
12. Gravity anomalies - Large changes in gravity between ZUPTSshould be avoided if possible. The system gives an automatic warning ifa change of more than 16 milligals occurs between ZUPTS and the ZUPTperiod is extended automatically to compensate. If large gravity gradi-ent changes are anticipated, zero velocity updates should be at shorterintervals with 1-1/2 to 2 minutes found to handle all gradients experi-enced to date.
B-2
.L _ •

13. Smooth travel - All travel should be accomplished in as smooth amanner as practical, avoiding chuckholes, wash boards, rough suddenstops, unnecessary direction changes and any other extreme accelerations.
14. Time distance limit - Traverses should not exceed 600 mile hours(distance travelled times time travelled) without special procedures be-cause of IPE and IPN overflow.
15. Adjacent points - Points less than 500 feet apart should normal-ly be set with an offset device for best relative accuracy. Closelyspaced points 0l mile or less) should be included in the same traverse,or adjacent points in different traverses should be tied together withcross flights. Whenever practical, strveys should be adjusted using aleast squares grid adjustment.
Following the guidelines presented above produced accuracies in ex-cess of 1:70,000 + 10cm (l-) relative to the nearest control. Accuracyof this level is iecessary only for first order control or a few otherprojects. For most projects, accuracy of 1:10,000 + 10cm (l-) is morethan adequate and has consistently been obtained wi'h a well-calibratedISS system in real time without smoothing. Therefore, adherence to therestrictions listed above and in the published literature (such asstraight line traverses) is not absolutely necessary for most projectsother than high order control.
B-3

1L~~0 al 0 0 -
0) -V $.O M. I~ n. ON ~
4-i
Inj Fn ; z 6 c) ; j &
r- o % ,r. 4
0
>1
a,
4J .-- -to . ~ ~ 0
P, 0) m%. NC. 4 - - oC..) 4 P - Go m)C~ - ko0
4J L") N A A 0 0 NVV C- - -D Cc mr qt -W -q- R Ln Ln 44
.- =C j C~.j cli C.J C%J C .J c C'j 4U. -
U, .0
I- .- 4..
4A 0) - -C
C. ) 4.) 10 .- 4-) 4.- al.C0
V) 4J 0 0) .- =.
'0 4- S- 1 V .-) - .
c c, 0 ) 4-4- o 4- 4- 1.
= cc . aU aU OWL
-C. =) 0 ) 4) 0) U)
o_ o c 0 c fa t- 4-to 0 EU M- M4 to 0:0I
u~ ~ ~ L. LL am U). a. " ID N
4J 4-' 4-' 0)1 03 0-) 4C C. toLC L) CC (on0 0 .
M, C.ml Zi
S 41
>9 >9 > 9 > 9 >9 ff 4AEUt go mU EU4) 0 E
mra

Appendix D
Field Preparation for an inertial _urvey*
The user's surveyor must make the following preparations prior to theexecution of an inertial survey.
1. Research all the available control stations in the immediate area ofthe positions to be sureyed.
2. Identify a!' stations and assess their potential use as a helicopterlanding site. Power lines, buildings, walls, etc., directly inhibit safeflight. Air traffic routes must be given consideration when operating inthe vicinity of an airport.
3. At many stations it will be necessary to obtain permission to land.Contact the owners, public or private, prior to using the station. Per-mission will usually be granted once the helic'9ter operation is ex-plained.
4. Clear all debris from the landing area and prepare the site so thehelicopter may rest firmly on the ground.
5. For those stations without clear access for landing or takeoff,establish an offset to a more suitable point. Precomputation of thepoints' geographic coordinates is always desirable and sometimes abso-7utely necessary when used as an endpoint.
6. Target or flag all landing sites to be visible from the air.
7. Prepare a sketch of each site and identify any prominent landmarksfor the pilot.
8. List the stations and their approximate coordinates in the order thetraverse will be flown. This list greatly simplifies the task of thepilot and ISS operator.
9. Perform an aerial reconnaissance of the area, preferably with thepilot, a short time before conducting the survey. This is to insure thatall flagging is intact while also acquainting the pilot with the flightroutine. Avoiding confusion at the time of the survey is essential forefficient use of the system rental time.
*From Penney (2)