
Answers to Exercises - Springer978-1-349-13108-2/1.pdf · Answers to Exercises Chapter 1 1.1.9 1...
16
Answers to Exercises Chapter 1 1.1.9 1.1.10 1.1.11 1.1.12 1.1.13 1.2.6 1.2.7 250 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 5 13 17 43 26 00000 -16 00001 -15 00010 -14 00011 -13 00100 -12 00101 -11 00110 -10 00111 -9 01000 -8 01001 -7 01010 -6 01011 -5 01100 -4 01101 -3 01110 -2 01111 -1 00000101 -5 00001101 -13 00010001 -17 00101011 -43 00011010 -26 10000 10001 10010 10011 10100 10101 10110 10111 11000 11001 11010 11011 11100 11101 11110 11111 11111011 11110011 11101111 11010101 11100110 All sums yield the expected correct results. The results of multiplications are given in the following table: 5 13 17 43 26 5 25 65 85 -41 -126 13 65 -87 -35 47 82 17 85 -35 33 -37 -70 43 -41 47 -37 57 94 26 -126 82 -70 94 -92 The results for the various other sign choices are as expected. Using a simple program we get 8! = -25216. Sixteen factors of 2 are first used in 18! 2. 71828 X 10°, (1.0101101111110000101) 2 X 2 1 , (2.B7E1) 16 X 16°. Representation 1 0 1000 00000000000 2 0 1001 00000000000 3 0 1001 10000000000 4 0 1010 00000000000 5 0 1010 01000000000 6 0 1010 10000000000 10 0 1011 01000000000 20 0 1100 01000000000 40 0 1101 01000000000 70 0 1110 00011000000 100 0 1110 10010000000 Reciprocal 1 0 1000 00000000000 1.2.8 1.2.10 1.2.11 1.3.11 1.3.12 1.3.14 1.3.16 1.3.17 1.3.19 1.3.20 1.4.11 2 0 0111 00000000000 3 0 0110 01010101011 4 0 0110 00000000000 5 0 0101 10011001101 6 0 0101 01010101011 10 0 0100 10011001101 20 0 0011 10011001101 40 0 0010 10011001101 70 0 0001 11010100001 100 0 0001 01000111101 For negatives simply replace the leading bit by 1. The spaces are just to make reading the representations easier and would not be part of the actual representa- tion. For the machine unit, the next representable number greater than 1 is 1 + 2- 11 so that 1-l = 2- 11 for chopping or T 12 for symmetric rounding. Largest representable has binary representation 0 1111 11111111111 which represents (2 - 2- 11 )2 7 = 256 - 1/16. Smallest positive is 0 0000 00000000001 which is (1 + 2-11)2-s. 112 = 1 x z- 1 = (1.0) 2 2-1, 314 = (1 + 112) x 2- 1 = (1.1) 2 2- 1 , 15/8 = (1 + 1/2 + 1/4 + 1/8) X 2° = (1.111) 2 2°, 15.75 = 8 + 4 + 2 + 1 + 1/2 + 1/4 = (1.11111)22 3 . (a) 1-l = 2- 40 for chopping or 2- 41 for symmetric round- ing. Smallest positive is (1 + T 40 )2- 128 , largest is (2 - 2-40)2127. (b) 1-l = T 52 for chopping or 2- 53 for symmetric round- ing. Smallest positive is (1 + 2- 52 )2- 1024 , largest is c 2 _ 2 -52) 2 1023. Representation is (1.100110011 ... 001) 2 T 3 . Error is Error is For IEEE this yields an error of (115)2- 26 . f>(x + y) :$; 0.0055, f>(x y) :$; 0.0062325, f>(xly) :$; 45.15. p(x + y) :$; (4.17)10- 2 , p(x y), p(xly) :$; (4.22)10- 2 . x = 0.0115, y = 0.0114 each rounded to 2 significant figures gives :X= 0.012, y = 0.011, p(x) = p(y) = 0.04, but p(x -·y) = 9. Using an 8-bit mantissa with bias 128, take a = b = -c = 2 127 . Then a(b + c) = 0 but both ab and ac overflow the system. Assuming that both p(a), p(h) :$; then the first loop results in the error bound (n + while the second loop leads only to the bound because there is no error
Transcript of Answers to Exercises - Springer978-1-349-13108-2/1.pdf · Answers to Exercises Chapter 1 1.1.9 1...

Answers to Exercises
Chapter 1
1.1.9
1.1.10
1.1.11
1.1.12 1.1.13 1.2.6
1.2.7
250
0 1 2 3 4 5 6 7 8 9
10 11 12 13 14 15 5
13 17 43 26
00000 -16 00001 -15 00010 -14 00011 -13 00100 -12 00101 -11 00110 -10 00111 -9 01000 -8 01001 -7 01010 -6 01011 -5 01100 -4 01101 -3 01110 -2 01111 -1 00000101 -5 00001101 -13 00010001 -17 00101011 -43 00011010 -26
10000 10001 10010 10011 10100 10101 10110 10111 11000 11001 11010 11011 11100 11101 11110 11111 11111011 11110011 11101111 11010101 11100110
All sums yield the expected correct results. The results of multiplications are given in the following table:
5 13 17 43 26 5 25 65 85 -41 -126 13 65 -87 -35 47 82 17 85 -35 33 -37 -70 43 -41 47 -37 57 94 26 -126 82 -70 94 -92 The results for the various other sign choices are as expected. Using a simple program we get 8! = -25216. Sixteen factors of 2 are first used in 18! 2. 71828 X 10°, (1.0101101111110000101)2 X 21, (2.B7E1)16 X 16°. Representation 1 0 1000 00000000000 2 0 1001 00000000000 3 0 1001 10000000000 4 0 1010 00000000000 5 0 1010 01000000000 6 0 1010 10000000000
10 0 1011 01000000000 20 0 1100 01000000000 40 0 1101 01000000000 70 0 1110 00011000000
100 0 1110 10010000000 Reciprocal
1 0 1000 00000000000
1.2.8
1.2.10
1.2.11
1.3.11
1.3.12 1.3.14
1.3.16
1.3.17
1.3.19 1.3.20
1.4.11
2 0 0111 00000000000 3 0 0110 01010101011 4 0 0110 00000000000 5 0 0101 10011001101 6 0 0101 01010101011
10 0 0100 10011001101 20 0 0011 10011001101 40 0 0010 10011001101 70 0 0001 11010100001
100 0 0001 01000111101 For negatives simply replace the leading bit by 1. The spaces are just to make reading the representations easier and would not be part of the actual representation. For the machine unit, the next representable number greater than 1 is 1 + 2- 11 so that 1-l = 2- 11 for chopping or T 12 for symmetric rounding. Largest representable has binary representation 0 1111 11111111111 which represents (2 - 2- 11)27 = 256 -1/16. Smallest positive is 0 0000 00000000001 which is (1 + 2-11)2-s. 112 = 1 x z-1 = (1.0)2 2-1, 314 = (1 + 112) x 2-1 = (1.1)22-1, 15/8 = (1 + 1/2 + 1/4 + 1/8) X 2° = (1.111)22°, 15.75 = 8 + 4 + 2 + 1 + 1/2 + 1/4 = (1.11111)223. (a) 1-l = 2-40 for chopping or 2- 41 for symmetric rounding. Smallest positive is (1 + T 40)2- 128 , largest is (2 - 2-40)2127. (b) 1-l = T 52 for chopping or 2-53 for symmetric rounding. Smallest positive is (1 + 2-52)2- 1024, largest is c2 _ 2-52)21023. Representation is (1.100110011 ... 001)2T 3. Error is ~-t/40. Error is ~-t/20. For IEEE this yields an error of (115)2- 26. f>(x + y) :$; 0.0055, f>(x y) :$; 0.0062325, f>(xly) :$;
45.15. p(x + y) :$; (4.17)10-2, p(x y), p(xly) :$; (4.22)10-2. x = 0.0115, y = 0.0114 each rounded to 2 significant figures gives :X= 0.012, y = 0.011, p(x) = p(y) = 0.04, but p(x -·y) = 9. 4~-t. Using an 8-bit mantissa with bias 128, take a = b = -c = 2127 . Then a(b + c) = 0 but both ab and ac overflow the system. Assuming that both p(a), p(h) :$; ~-'• then the first loop results in the error bound (n + 1)~-t while the second loop leads only to the bound 3~-t because there is no error

in the representation of integer quantities. 1.4.12 100,000 terms are needed. Sum of absolute values of
terms is around 12, so overall round-off error (and total error) are bounded by (105 + 12)~-t = 6 X 10-3 •
1.4.13 13 terms needed. Powers of 2 have no error, so roundoff error ::; 5 X 10-7 • Total error::; 1.05 X 10-5 •
Chapter 2
2.1.8 The differences are n 1/n "2 diff1 diff2 1 1.0000 -0.7500 0.6111 2 0.2500 -0.1389 0.0903 3 0.1111 -0.0486 0.0261 4 0.0625 -0.0225 0.0103 5 0.0400 -0.0122 0.0049 6 0.0278 -0.0074 0.0026 7 0.0204 -0.0048 8 0.0156
2.1.9 The differences are X f(x) diff1 diff2 diff3 0 1.0000 0.2080 0.0480 0.0480 1 1.2080 0.2560 0.0960 0.0480 2 1.4640 0.3520 0.1440 0.0480 3 1.8160 0.4960 0.1920 4 2.3120 0.6880 5 3.0000
2.1.11 !:!. 4a; = a,+4 - 4ai+ 3 + 6ai+2 - 4ai+ 1 + a;. 2.1.13 The terms are 1, 1/3, 1/5, 117. Their first differences are
-2/3, -2/15, -2/35 which give the second differences 8/15, 8/105.
2.1.15 !:!.ka = (- 2)k(k!) n (2n- 1)(2n + 1) · · · (2n + 2k- 1)
2.2.8 The difference table is X f(x) diff1 diff2 diff3
-1 -8.0000 2.0000 4.0000 18.0000 0 -6.0000 6.0000 22.0000 18.0000 1 0.0000 28.0000 40.0000 18.0000 2 28.0000 68.0000 58.0000 3 96.0000 126.0000 4 222.0000
Chapter 3
3.1.8 3.1.12
3.1.13
3.1.14 3.2.6
3.2.7 3.2.8
3.2.9
3.2.10
3. arctanhx = 'I.i'~ox2i+ 1/(2i + 1), approximationis0.54903 to 5 decimal places. (1/2) 'I./~o (- 1Y(x - :rc/6)2i/(2i)!
+ (V3/2) 'I.;:0 (- 1Y(x - :rc/6?i+1/(2i + 1)! Approximation is 0.5591924, error bound is 9.9 x 10-\ error is 5 X 10-7 •
A suitable bound is 0.0125; 51 terms. 2x = 1 +xln2 + (xln2)2/2! + (xln2)3/3! + ... Bound is (xln2t+ 1[1/{l - x1n2/(N + 2)}]/(N + 1)! Number of terms: need N = 14. 8 terms needed. Bound is x2N+ 3/(2N + 3)(1 - x2). For special case this is 2.9 x 10-4 •
Worst error for x = :rc/4. Hence the relevant derivative is bounded by "'l/3i2 and so uniform bound is ("'l/3i2) (:rc/12)N+1/(N + 1)!. Need N = 4. program e3_2_10; function apsin(t:real):real;
For IEEE, 21 terms are needed with arithmetic performed to an extra 6 bits accuracy.
1.4.14 To 4 decimal places the norms are L 1 : 0.1503, L2 :
0.1402, L~: 0.2337. 1.4.15 L 1 : 0.4674, L 2 : 0.3933, L~: 0.5708.
2.2.9
2.2.10
2.3.4
2.3.5
2.3.6
3.3.10 3.3.11 3.3.12
3.3.13
Difference table is X ln(x) diff1 diff2 diff3 diff4
0.50 -0.6931 0.4054 -0.1177 0.0531 -0.0293 0.75 -0.2877 0.2877 -0.0646 0.0239 -0.0115 1.00 0.0000 0.2231 -0.0407 0.0124 -0.0047 1.25 0.2231 0.1824 -0.0283 0.0077 1.50 0.4055 0.1541 -0.0206 1.75 0.5596 0.1335 2.00 0.6931
Difference table is X ln(x) diff1 diff2 diff3 diff4
0.50 -0.6931 0.4055 -0.1178 0.0532 -0.0295 0.75 -0.2877 0.2877 -0.0645 0.0237 -0.0111 1.00 0.0000 0.2231 -0.0408 0.0127 -0.0051 1.25 0.2231 0.1823 -0.0282 0.0076 1.50 0.4055 0.1542 -0.0206 1.75 0.5596 0.1335 2.00 0.6931
The difference between the two tables results purely from the propagated round-off error in the table in Exercise 2.2.9 whereas the differences in this table are computed to greater accuracy and then rounded for output. The fourth and seventh entries should read 1.417 and 2.176 not 1.427 and 2.167. The third entry has a transposition error; it should be 0.7547, not 0.7457. Changing the entry 20.65 to 20.75 has the effect of making the second differences grow steadily and very slowly rather than varying erratically.
var xl, x2:real; begin
xl: =(t-pi/6); x2:=sqr(x1)/2; xl: =x1 *sqrt(3); apsin:=(l +x1-x2*(1 +xl/3-x2/6))/2;
end; var i: integer;
x: real; begin
for i: =0 to 10 do begin x: =(25+ 2•i)•pi/180; writeln( apsin(x): 10:6,sin(x) :10:6);
end; end. Sum is :rc/4. 50,000 terms are needed. 0.3678795. 0.81562 without the transformation. 0.821313 using the Euler transformation. The following program was used to generate the second answer for Exercise 3.3.12:
251

program e3_3_13; const maxterm=8; function term(n:integer):real; begin term:=1/sqr(n+l); end; function E_sum(tol:real):real;
var m,s,t:real; i,j ,sign:integer; diff: array[O .. maxterm] of real;
begin m:=1; s:=O; diff[O]:=term(O); i:=O; sign:=1; repeat
t: =diff[O]*m; s:=s+sign*t; i:=i+1; sign:=-sign; m:=rn/2; diff[i]: =term(i);
Chapter 4
4.1.9 Using initial interval (0.1, 1.5] we get the final interval [0.8875, 0.975].
4.1.10 With initial intervals [-3, -2], (-1, 0], (1.0, 1.4], [1.4, 2.0], we get final estimates -2.28125, -0.46875, 1.15, 1.49375.
4.1.11 Final interval (1.25, 1.3125]. 4.1.12 17 more iterations each. The various solutions obtained
are 0.947747 for Exercise 4.1.9, -2.300000, -0.500000, 1.100000, 1.500000 for Exercise 4.1.10 and 1.256431 for Exercise 4.1.11.
4.1.13 The solutions are: 1 -0.703468 2 -0.407784 0.714806 3.999994 3 -0.288551 0.408958 5.666298 4 -0.223564 0.288841 6.523369 5 -0.182549 0.223671 7.154306 6 -0.154289 0.182594 7.653966 7 -0.133629 0.154320 8.067511 8 -0.117851 0.133644 8.420131 9 -0.105400 0.117851 8.727379
10 -0.095345 0.105415 8.999515 4.1.14 Abbreviated tables of output are as follows:
n=2 n=4 0.0 0.000 0.0 0.000 0.2 1.241 1.268 0.2 1.229 1.274 0.4 1.595 1.640 0.4 1.572 1.602 0.6 1.910 1.935 0.6 1.270 1.309 0.8 1.933 1.963 0.8 1.012 0.982 1.0 1.535 1.571 1.0 0.834 0.785
n=6 n=8 0.0 0.000 0.0 0.000 0.2 1.228 1.253 0.2 1.241 1.271 0.4 1.270 1.309 0.4 1.012 0.982 0.6 0.900 0.873 0.6 0.695 0.654 0.8 0.695 0.654 0.8 0.522 0.491 1.0 0.556 0.524 1.0 0.442 0.393
n = 10 0.0 0.000 0.2 1.214 1.250 0.4 0.834 0.785 0.6 0.556 0.524 0.8 0.442 0.393 1.0 0.353 0.314
252
for j:=i-1 downto 0 do diff[j]:=diff[j+1]- diff[j];
until (abs(t)<tol) or (i>=maxterm); E_sum: =s/2;
end; var eps, sum:real; begin
end.
eps:=1e-6; sum:=E_sum(eps); writeln(sum: 10:6);
3.3.14 -118 without Euler's transformation. - 2/9 using the transformation is the exact sum.
3.3.16 113(2~ for truncation after N terms. 3.3.17 Bound is 11(4Nv'3). N = 11.
4.2.16 0.90930, 0.96945, 0.93301, 0.95674, 0.94186 are the first five iterates.
4.2.17 With g(x) = -0.2 + 4.48/x - 1.63/r - 1.8975/x3 the first four iterates are -2.13136, -2.46478, -2.15919, -2.43598.
4.2.20 lg' (x) I < 1 for x < - 2.15 so that slow convergence follows from the local convergence theorem.
4.2.21 The following program was used for Exercise 4.2.17 with the obvious modification for Exercise 4.2.16: program e4_2_21; function g(x:real):real; begin
g: = -0.2+( 4.48-(1.63+ 1.8975/x)/x)/x; end; var eps,aO,a1:real;
iter:integer; begin
eps:=1e-6; a1:=-2.5; iter:=O; repeat
aO:=al; a1:=g(a0); iter: =iter+ 1; writeln(iter:3 ,a1: 12:8);
until abs(a1-a0)<eps; end. This converged in 140 iterations to -2.300000. For Exercise 4.2.16, 27 iterations gave the solution 0.947747.
4.2.23 We can use A = 0.84 and x0 - x1 ""' 0.09 so that e20 < 0.0172. With this estimate of A, about 80 iterations are needed.
4.2.25 Four Aitken iterations gave agreement to eight decim-als: 0.94774713.
4.2.26 Four Aitken iterations yields agreement to the solution -2.30000000.
4.2.27 Denoting the partial sums by sm we gets~= 1/(1 - x). 4.3.12 First five iterations: 3.607142857, 3.605551627,
3.605551275, 3.605551275, 3.605551275. 4.3.13 The following program was used to generate the results
below: program e4_3_13; function f(x:real):real; begin f: =sqr(x)-13; end;

4.3.14
4.3.15 4.3.16
4.3.18
function df(x:real):real; begin df: =2*x; end; var eps,xO,x1:real;
iter:integer; begin
eps:=1e-8; x1:=3.5;
iter:=O; repeat
xO:=x1; x1: =xO-f(xO)/df(xO); iter: =iter+ 1; writeln(iter:3,x1:12:8); until (abs(x1-xO)(eps);
end. 1 3.60714286 2 3.60555163 3 3.60555128 4 3.60555128 Obvious modifications to the above program yield the converged results: Ex. 4.2.1: Ex. 4.2.16: Ex. 4.2.17:
5 -1.00000000 4 0.94774713 5 -2.30000000
5 iterations suffice in all cases. The following program was used and selected output is reproduced below: program e4_3_16; var c:real; function f(x:real):real; begin f:=cos(x)-c; end; function df(x:real):real; begin df:=-sin(x); end; var eps,xO,x1:real;
i,iter:integer; begin
eps:=1e-8; for i: = -10 to 10 do begin
c: =abs(i/10); x1:=pi/2-c; iter:=O; repeat
x0:=x1; iter: =iter+ 1; if c<1 then x1:=x0-f(x0)/df(x0) else x1=x0-2*f(x0)/df(x0);
until ( abs(x1-x0)<eps); if i<O then writeln( -c:5:1,pi-x1:12:8,iter:4)
else writeln(c:5:1,x1:12:8,iter:4); end;
end. 0.0 0.2 0.4 0.6 0.8 1.0
1.57079633 1.36943841 1.15927948 0.92729522 0.64350111
-0.00000000
1 3 3 4 4 4
The program used was as follows: program e4_3_18; function f(x:real):real; begin f:=cos(x)+1; end; function df(x:real):real; begin df:=-sin(x); end; var eps,xO,x1,x2:real;
dO,d1,r: real; kO,k1,iter:integer;
4.3.19
4.4.9
4.4.10
begin eps:=1e-8; x2:=3; d1:=0; k1:=-10; iter:=O; repeat
x0:=x1; x1:=x2; d0:=d1; k0:=k1; x2:=x1-f(x1)/df(x1); iter:=iter+ 1; d1:=x2-x1; if iter> 1 then begin
r: =dlldO; k1:=round(l/(1-r)); writeln(iter:3 ,x2: 12:8 ,r: 10:4,k1 :3);
end else writeln(iter:3,x2:12:8); until (k1=k0) and (iter2); repeat
x1:=x2; x2:=x1-k1 *f(x1)/df(x1); iter: =iter+ 1; writeln(iter:3,x2:12:8);
until abs(x2-x1)_eps; end. The results for this case were: 1 3.07091484 2 3.10626847 0.4985 2 3 3.12393240 0.4996 2 4 3.14159311 5 3.14159265 6 3.14159265
With appropriate modifications the results for the equation of Example 4.3.7 were: 1 2.37042254 2 2.28206335 0.6819 3 3 2.22220456 0.6774 3 4 2.10114097 5 2.10000010
From (1,1), the next two iterations produce (1, 3/2) and (8/9, 49/36). From ( -1, 1), we get ( -1, 112) and ( -1/2, 1/4). The initial point (1, 3/5) gives a singular Jacobian matrix for the first iteration and therefore breaks down. The routine of Example 4.3.10 appropriately modified, with the initial point (1, 1) converges in 5 iterations to (0.937565, 1.347810). Three iterations from ( -1, 1) results in ( -1.25, 0.375), a point at which the Jacobian matrix is singular. The initial point (1, 0.6) does not produce an exact singular matrix; after 20 iterations the final point is (587,203.6, 1,468,007.0). Using X0 = 3, x1 = 4, the next five iterates are 3.571428571, 3.603773585, 3.605559730, 3.605551273 and 3.605551275. The program used was: program e4_ 4_10; function f(x:real):real; begin f:=sqr(x) - 13; end; var eps,xO,x1,x2:real;
iter:integer; begin
eps:=1e- 6; x1:=3; x2:=4; iter:=1; repeat
xO:=x1; x1:=x2; x2: =x1 - f(x1)*(x1 - x0)/(f(x1) - f(xO)); iter:=iter + 1; writeln(iter:3,x2:12:8);
253

until (abs(x2 - x1) < eps); end.
Ex. 4.2.16 Ex. 4.2.17
6 8
0.94774713 -2.30000000
The results generated were 2 3.57142857
4.4.12 The ratios all settled fairly well after some initial instability. The last few for each case were:
3 3.60377358 4 3.60555973 5 3.60555127 6 3.60555128
4.4.11 The results were: Ex. 4.2.1: 13 -1.00000000
Chapter 5
5.1.7
5.1.9
5.1.10
5.1.11
The next five terms are: -0.200000, 4.520000, -3.430000, 19.364100, -26.227320. We get k uk qk 0 1.000000 -0.2000 1 -0.200000 -22.6000 2 4.520000 -0.7588 3 -3.430000 -5.6455 4 19.364100 -1.3544 5 -26.227320 -3.3938 6 89.010832 For the smallest root we form ratios qk = uJuk+t and get 0 1. 000000 -1.1641 1 -0.859025 -0.2772 2 3.098925 -0.6462 3 -4.795616 -0.4360 4 10.999654 -0.5328 5 -20.645351 -0.4849 6 42.577376 The following program was used: 5.2.6 program e5_1_11; type vee = array(O .. 20] of real; procedure next_term(deg:integer; coeffs:vec; var 5.2.9 terms:vec); var i:integer; begin 5.2.10
for i:=O to deg - 1 do terms[i]:=terms[i + 1];
terms(deg]:=O; 5.3.6 for i:=O to deg - 1 do
terms(deg]:=terms(deg] - coeffs[deg - i]*terms(i]; terms[ deg]: =terms[ deg]/coeffs(O]; 5.3. 7
end; var c,u: vee;
qO,q1,eps: real; d,i,its: integer;
begin d:=4; for i:=O to d - 1 do u(i]:=O; u[d]:=1;
5.3.8
Chapter 6
6.1.9 d = 1, c = 0.1, b = 0.01, a = 0.002. 6.1.10 (a) a = 7, b =I= -2
(b) a= 7, b = -2: y = -(2 + z), x = 2- z (c) z = -3/5, y = 8/5, x = -2/5.
Ex. 4.2.1: 1.5893, 0.2947, 8.5527, 1.7782, 1.5830, 2.1357, 1.9930 Ex. 4.2.16: 0.4399, 2.0851, 0.6894 Ex. 4.2.17: 0.9513, 0.6055, 1.3485, 1.0163, 1.0798
c(0]:=1.8975; c(1]:=1.63; c(2]:=-4.48; c(3]:=0.2; c(4]:=1; its:=O; q1:=20; eps:=5e- 3; write(its:4,u( d] :12:6); repeat
its:=its + 1; q0:=q1; next_ term( d,c,u); q1:=u(d - 1]/u(d]; writeln(q1:10:4); write(its:4,u( d]: 12:6);
until (abs(qO - q1) < eps); end.
The final few results generated were: 5 -20.645351 -0.4849 6 42.577376 -0.5072 7 -83.950783 -0.4967 8 169.020204 -0.5015 9 -337.007939 Using the quadratic formula, roots are 9.995 and 0.1005. Using product of roots (and still chopping) yields 0.1000 for the smaller one. The values of u, v for the next two iterations are: 2.6024, -1.6464 and 2.6000, 1.6499. Other factor (x2 + 2.8024x + 1.1665). Using fo.ur iterations yields converged factors (x2 - 2.6x + 1.65) and (x2 + 2.8x + 1.15) which have roots 1.5, 1.1 and -2.3, -0.5 respectively. Two iterations starting with u = -2 gives final u = -2.329933 and coefficients of the cubic as 1.000000 -2.285821 1.202141 -1.358308. The converged root and coefficients are Iteration 6: -2.300000
1.000000 -2.100000 0.350000 0.825000 Using -0.52 as a starting value for the cubic with coefficients given by the previous exercise, the converged root and coefficients of the quadratic are Iteration 4 -0.500000
1.000000 -2.600000 1.650000 The roots of the quadratic are 1.1 and 1.5.
-0.1655 and x = 3.333. With pivoting and exact arithmetic, z = -1, y = 1, x = 1. Using 4 significant figures: z = -1.000, y = 0.9999, x = 1.000.
6.1.11 Results as in Exercise 6.1.9. 6.1.12 Simple algorithm with exact arithmetic breaks down.
With 4 significant figures everywhere, z = 1.001, y =
6.1.13 Results as for previous exercise. 6.2.11 n(n - 1)(m + (2n - 1)/6]. 6.2.12 The corresponding table is
254

Elim. Back
sub. Total
6.2.13
6.2.14 6.2.15 6.3.9 6.3.10
+ -' X
n(n - 1)(5n - 1)/6 n(n - 1)(5n - 1)/6 n2(n- 1)/2 n2(n - 1)/2
n(n - 1)(8n - 1)/6 n(n - 1)(8n - 1)/6
For the same input A and b: Crout reduction:
for i:-1 ton - 1 for j: =i + 1 to n
aii: =a;j /au for k:=i + 1 ton
ajk: =ajk - aji a;k Forward substitution:
for i:-1 ton Y;:=b; for j:=1 to i - 1
Y;:=y;- a;j Yj Y;:=y;/a;;
Back substitution: for i: =n downto 1
X;:=y; for j: =i + 1 to n
X;: =x; - aij Xj d = 1, c = 0.1, b = 0.01, a = 0.002. d = 1, c = 0.1, b = 0.01, a = 0.002. 76.00011, 37.20221, 24.00005. 38.00011, 24.00005.
I n(n- 1)/2
nz
n(3n- 1)/2
Chapter 7
7.1.4 7.1.5 7.1.7 7.2.9 7.2.12 7.2.13
7.3.7
7.3.8
7.4.8
7.4.9 7.4.11
-11.2678. -12.368889 -0.00037 (Horner), 0 (direct), -0.000375 (true). 0.5249, 0.8614, 1.2820. 0.4916, 0.8724, 1.2238, 1.3256. 0.4762, 0.8753, 1.2238, 1.3384. 0.4729, 0.8754, 1.2238, 1.3352. Linear: 0.06, 0.02, 0.105. Quadratic: 0.036, 0.0067, 0, O.o3. Cubic: 0.0135, 0.0005, 0, 0.0135. Quartic: 0.01296, 0.00032, 0, 0.00108. The difference table is 1.0 0.6931 0.8747 -0.3343 0.1429 -0.0596 1.3 0.9555 0.7410 -0.2343 0.0833 1.4 1.0296 0.6473 -0.1760 1.7 1.2238 0.5417 2.0 1.3863 0.8747, 1.1638. The graphs show increasing deviation as x moves away
2.00 ,----------------,
0.00 "---------------___j
0.50 2.50
Exercise 7.4.11
6.3.11 6.3.13
6.3.14
6.4.8 6.4.9
6.4.10 6.4.12 6.4.13 6.5.8
6.5.9
6.5.10
6.5.12
6.5.13
7.4.12
K1(A)~ 3.8 X 106 , K~(A) ~ 4 X 106 •
Exact: (1, 1, 1, 1). Computed: (0.799995, 0.800005, 0.799997, 1.20000). Residuals: -10-7 x (5.7, 9.1, 12.6, 13.4). 1-norm: 1.4 X 10-14 $ 0.2 $ 0.205. oo-norm: 1.4 X 10-14 $ 0.200005 $ 0.223. (2, 2, 2, 0), 1-norm: 2.6 X 10-7 $ 1 $ 3.8 X 106 •
oo-norm: 2.5 X 10-7 $ 1 $ 4 X 106 •
(1.7, 1.2, -1.4, 1.0); (1.86, 0.97, -1.96, 0.9). (1. 7, 1.03, -1.843, 0.9783); (1.9656, -0.9921, -1.9902, 1.0006). 5 iterations (2.0000,1.0000, -2.0000, 1.0000). Optimal parameter close to 1.05. 4 iterations gives exact solution to high accuracy. Eigenvalues are -1 and 3 with eigenvectors (1, -1) and (1, 1) respectively. The next three vectors (after normalizing) are (5/12, 7112), (19/36, 17/36), (53/108, 55/108) and the eigenvalues estimates are 3, 3 and 3 exactly. After 15 iterations the estimate was still moving slowly around 10.83. See Exercise 6.5.13 for more accurate estimate. Exercise 6.5.8, two eigenvalues in [ -1, 3]. Exercise 6.5.10, two in [8, 26], one each in [ -4, 6] and [-11, -5]. Using shifts of 11, 10.5, 1 and -8, convergence to eigenvalues 11.0132, 10.5259, 1.1377 and -8.4392 was achieved in 4, 5, 4 and 5 iterations respectively.
from the interval spanned by the nodes. + indicates original function, d is interpolant. The two graphs in (a) and (b) below are for 11 equally spaced nodes -5, ... , 5. Both usee= 0.001, first with maximum degree 5 then 10.
1.20 ,-----,--------, 1.20 ...,-------,---.,..,
-0.50 '------'----__J -0.50 L_ __ ___J ___ --::-"
-5.00 5.00 -5.00 (a) 5.oo (b)
1.20 ,-----,--------,
·0.50 t__ __ ___JL.__ __ ___j -0.50 '---------'---_J -5.00 5.00 -5.00 5.00
(c)
Exercise 7.4.12 (a) Maximum degree 5; (b) maximum degree 10; (c) Chebyshev nodes, c = 0.0001; (d) Chebyshev nodes -all nodes.
(d)
255

7.5.6
7.5.7
The graphs shown in (c) and (d) are for the Chebyshev nodes, first using the tolerances of the exercise then using all nodes. Po.t = f[xt]; P1.2 = f[xo] + (x - Xo) f[xo, Xz]; Pz.z = f[x0] + (x - X0 ) f[xo, x1] + (x - Xo)(x - Xt) f[xo, X1, Xz]. The array using points in the order 1.3, 1.0, 1.4, 1. 7 is
0.1 0.9555 -0.2 0.6931 0.8680
0.2 1.0296 0.8814 0.8747 0.5 1.2238 0.8884 0.8738 0.8753
Chapter 8
8.1.6 No; Yes quadratic; No. 8.1.8 s' not continuous at 2.
Add 2(x - 2) to s2(x). 8.1.9 0.5288, 0.8531. 8.1.11 The graphs of the linear and quadratic splines are
shown. They are almost indistinguishable at this size, with the quadratic, of course, having more curvature.
0.00 "----------------1.00 3.00
Exercise 8.1.11
8.2.9 x3/2- 4(x - 1) + 2.5x on [0,1]. -(x- 2)3/2- 2.5(x- 2) + 4(x - 1) on [1,2]. -(x- 2)3/2 - 4(x - 3) + 5.5(x- 2) on [2,3]. (x - 4)3/2 - 5.5(x - 4) + 4(x - 3) on [3,4].
8.2.12 The graph for the Chebyshev nodes is shown below.
-0.25 L__ _____ L-----~
-4.00 4.00
Exercise 8.2.12
8.2.13 The graphs below are for uniform nodes (a) and Chebyshev nodes (b).
256
7.6.9 tan( -0.2) = -0.2027 to 4 decimals places. 7.6.10 0:8418, 0.8423.
True value 0.8428 all to 4 decimal places. 7.6.12 tan ( -0.2) = 0.202628.
tan (0.7) = 0.843223. Both results are seriously contaminated by use of data from the rapidly changing regions of the tangent function.
(a)
Exercise 8.2.13 (a) Uniform knots; (b) Chebyshev knots.
(b)
8.3.7 The coefficients are:
8.3.8
8.3.9
A; B; 0.66667 3.33333 0.33333 2.66667 0. 00000 4. 00000
-0.33333 5.33333 -0.66667 Coefficients are:
(a) A; -0.85714
0.71429 0.00000
-0.71429 0.85714
(b) A; -0.27381
0.54762 0.08333
-0.88095 1.44048
B; 4.85714 2.28571 4.00000 5.71429
B; 4.27381 2.45238 3.91667 5.88095
C; 2.66667 4.00000 5.33333 4.66667
C; 2.28571 4.00000 5.71429 3.14286
C; 2.45238 3.91667 5.88095 2.55952
The two graphs are shown below. (Integer knots in part (a).)
1.25,--------,---,
4.00
(a)
Exercise 8.3.9 (a) Integer knots; (b) Chebyshev knots.
4.00
(b)
8.3.10 The two graphs below are almost indistinguishable. (Not-a-knot in part (a).)
1.20 ,--------,------, 1.20 ,--------,------,
(a) (b)
Exercise 8.3.10 (a) Not-aknot; (b) complete spline.
Chapter 9
9.1.8
9.1.9
9.1.11 9.2.10 9.2.11 9.2.12 9.2.13 9.2.14 9.2.15 9.2.16 9.3.8 9.3.9 9.4.9 9.4.10
9.4.13 9.4.15
1.7183, 0.8731 + 1.6903x, 1.0130 + 0.8511x + 0.8392x2 •
1.1752, 1.1752 + 1.1036x 0.9965 + 1.1036x + 0.5363x2 , 0.9965 + 0.9980x + 0.5363x2 + 0.1761x3
K 1 2:: 18. 1, x - 1/2, x2 - x + 1/6, x 3 - 3x2/2 + 3x/5 - 1120. 1, x, 3x2 - 4, 5x3 - 12x (or scalar multiples). 1, x - 2/5, x2 - 8x/9 + 8/63. 1, x, x2 - 113, x 3 - 3x/5. 1, x, x2 - 1/2. 1t /2 (n 2:: 1), 1t (n = 0). (e - 1/e)/2, 3/e, (5/2)(e - 7/e), (7/2)(37/e - 5e). bk = 0, a0 = n, a2k = 0, azk+t = -41(2k + 1)2n. ak = 0, bk = ( -1)k+t (2/k). 3x2/4 + 114. Polynomials: 1, x, x2 - 519; coefficients: 2/3, 0, 3/4. Coefficients: 1.22432, 0, -0.18381, 0. Even coefficients: 1.2646, 0.4332, -0.0942, 0.0465, -0.0317, 0.0267; odd coefficients all zero.
Chapter 10
10.1.8 Forward: 0.95310180, 0.99503309, 1.00000125. 1.00503359, 0.99999943. 1.00000033,
0.99950033,
10.1.9
10.1.12
10.1.15
10.2.10 10.2.11 10.2.12
0.99995002, 0.99999515, Backward: 1.05360516, 1.00050033, 1.00004999, 1.00000489, 1.00335348, 1.00003334, 1. 00000000' 1.00000002, 1.00000034. -1.00503358,-1.00004997 -0.99999761, -0.99971658,-0.97315933, 1.81898940. Using h = 1/4, 1116, 1/64, ...
h f'(1) 2.5E- 01 -0.2444444444 6.3E- 02 -0.2495543672 1.6E- 02 -0.2499701849 3.9E- 03 -0.2499981038 9.8E - 04 -0.2499998810 2.4E- 04 -0.2499999925 6.1E- 05 -0.2500000000 tJ = 2-zs
f"(O) 1.5238095238 1. 9373925000 1.9950596616 1.9996714592 1. 9999761581 2 0 0000000000 1. 9997558594
4tJ/h {j = z-zs hopt '= (3tJ/ M)113 , emin = (3/2)(MtJ2/3)113 where M is a bound on the third derivative.
Chapter 11
11.1.8 (3/4)[(1/3) + (1/4)[(1), 1.5490.
8.4.15 The table below shows errors and ratios of these to the first error column as in Example 8.4.5. The pattern is again broadly consistent with an O(h4) error. 0.1 4.2E - 01 9.8E - 04 431 9.5E - 04 445 0.6 1.9E - 01 2.2E - 02 9 1.9E - 03 100 1.1 3.3E- 02 5.3E- 03 6 7.8E- 04 42 1.6 1.2E - 01 8.9E - 03 13 1.3E - 04 894 2.1 l.lE - 01 1.4E - 03 78 5.1E- 05 2070 2.6 5.2E - 02 1.8E - 03 29 8.4E - 06 6250 3.1 1.3E- 02 3.7E- 04 35 4.9E- 06 2594 3.6 6.6E - 02 9.2E - 04 71 4.8E - 07 137576 4.1 8.9E - 02 3.2E - 04 279 2.8E - 06 31433 4.6 6.4E - 02 1.4E - 03 47 7.5E - 06 8561
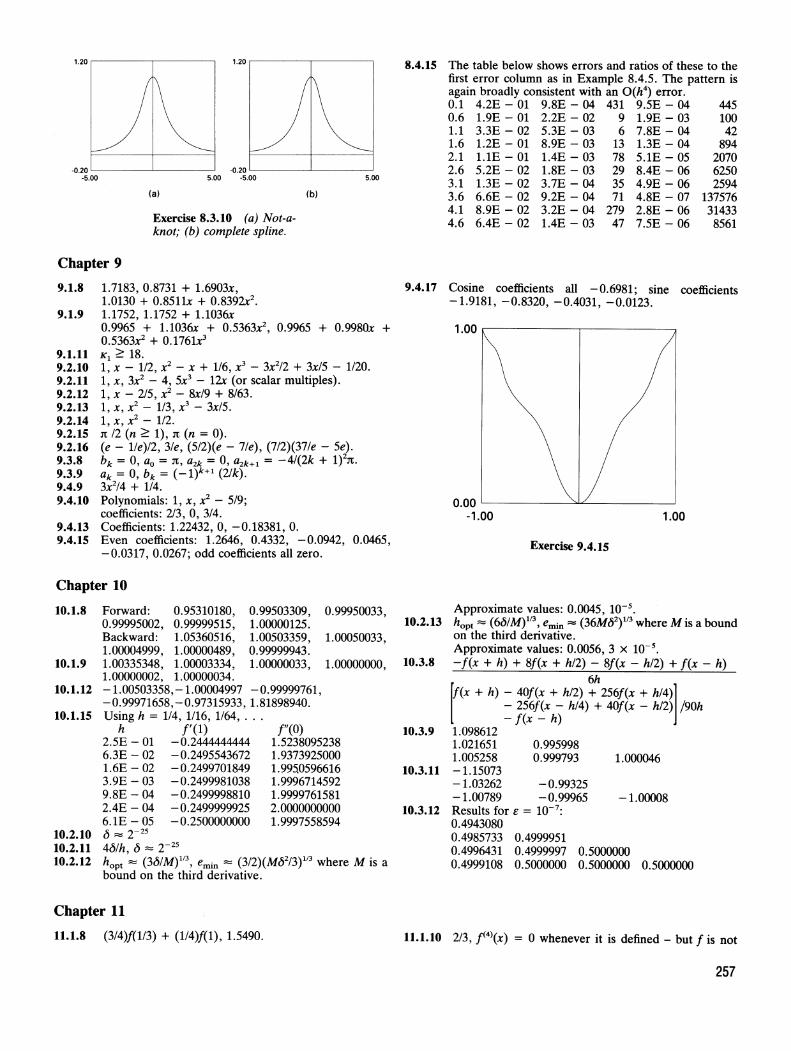
9.4.17 Cosine coefficients all -0.6981; sine coefficients -1.9181, -0.8320, -0.4031, -0.0123.
1.00
0.00 '--------~L..._ ____ _
-1.00 1.00
Exercise 9.4.15
Approximate values: 0.0045, 10-5 •
10.2.13 hopt = (M/M)113 , emin = (36MtJ2 ) 113 where M is a bound on the third derivative. Approximate values: 0.0056, 3 X 10-5 •
10.3.8 -f(x + h) + 8f(x + h/2) - 8f(x - h/2) + f(x - h) 6h
lf(x + h) - 40f(x + h/2) + 256f(x + h/4)1
- 256f(x - h/4) + 40f(x - h/2) /90h - f(x- h)
10.3.9 1.098612 1.021651 0.995998 1.005258 0.999793 1.000046
10.3.11 -1.15073 -1.03262 -0.99325 -1.00789 -0.99965 -1.00008
10.3.12 Results for E = 10-7 :
0.4943080 0.4985733 0.4999951 0.4996431 0.4999997 0.5000000 0.4999108 0.5000000 0.5000000 0.5000000
11.1.10 2/3, [<4>(x) = 0 whenever it is defined - but f is not
257

differentiable at 0 so the error formula is invalid. 11.1.11 [7/( -1) + 32/( -1/2) + 12f(O) + 32/(112) + 7/(1)]/45,
1.02222. 11.1.13 0.60653, 0.68394, 0.63233. True: 0.63212
Error bounds: 0.04167, 0.08333, 0.00035. 11.1.14 0.15154. 11.2.11 0.882604, 0.869163. 11.2.12 0.864956, 0.864683. 11.2.15 Trapezoid bounds: 1124, 1196
Simpson bounds: 0.0007, 0.000044. 11.2.16 N = 82, computed value 0.864708
true value 0.864665, error< 10-4 •
11.2.17 N = 11 intervals, (23 points) computed 0.8646650, true 0.8646647 error < 10-6 •
11.2.18 0.6532877. 11.3.8 Array is
1.135335
Chapter 12
12.1.10 12.1.11 12.1.12
[4.1, 13.7]. [7.3, 13.7]. Final bracket [7 .3667, 7 .4333] 19 evaluations total (8 for bracket) 66 needed for fixed step. [7.38902, 7.38910], 33 evaluations. 7.38906 in 9 iterations. 7.38905 in 2 iterations.
12.1.13 12.1.15 12.1.16 12.2.8 Contours graphed are for 1/4, 112, 1, 2, 4, 8
Gradient (-4, 0) Hessian [ 1~ i]x1 = (1, -3).
3.00 ,-,-------.,-------,---r---r-o--r-;TTl
-1.00 t__ _ ___.:~.____~__-----''------L'-'---"L_____j
-2.00
Chapter 13
13.1.10 2.17192.
2.00
Exercise 12.2.8
13.1.11 2.18508, 2.21093; errors 0.051, 0.025; ratio 0.49. 13.1.14 For IEEE single precision h""' 0.00073; using N = 211 ,
y(2) ""' 2.23583. 13.1.15 The graphs are shown in the figure. The curves gra-
dually converge to the right of the inflection point. 13.2.12 2.24115, 2.23663; errors -0.005, -0.0006. 13.2.13 2.25039, 2.23920; errors -0.014, -0.003. 13.2.14 2.24711, 2.23832; errors -0.011, -0.0023. 13.2.15 2.23820, 2.23681, 2.23625. 13.2.16 2.236626, 2.236134, 2.236076. 13.2.17 y(1/2) ""' 1.11816, y(1) ""' 1.41440, y(3/2) ""' 1.80294,
y(2) ""' 2.23620.
258
11.3.9
11.3.10 11.3.11 11.4.6 11.4.7 11.4.8 11.4.9 11.5.8 11.5.9 11.5.11 11.5.13
12.2.9 12.2.10
12.2.11 12.2.12 12.3.9 12.3.12 12.3.15
12.4.7 12.4.8
12.4.9
0.935547 0.868951 0.882604 0.864956 0.864690 0.869163 0.864683 0.864665 0.864665 Next row: 0.865790 0.864666 0.864665 0.864665 0.864665 0.14849566 using 33 points. 0.62053755 using 17 points. 25 evaluations, 0.864665. 25 evaluations, 0.864665. 65 evaluations, 0.864664717. 61 evaluations, 0.14849550. 5. 2. 2.3427' 2.35034, 2.350401. Nodes: 0.415775, 2.294280, 6.289945 Weights: 0.711093, 0.278518, 0.010389 Approximation: 0.495934.
X2 = (1, 1). (a) (1, 1) 2 iterations;(b) (1, 1) 2.iterations;(c) (1, 1) 6 iterations. (-0.1649, -0.67024). (1.00000, 1.00000), 5 iterations. Iterates (0, 1), ( -4, 3). Iterates (-1, 2), (-4, 3). Iterates: (1.24432, 1.65297), (1.25288, 1.59806) (1.02464, 1.00501), (0.99486, 0.98593) (0.99423, 0.98678), (0.99922, 0.99974) (1.00014, 1.00038), (1.00015, 1.00036) (1.00002, 1.00001), (1.00000, 0.99999). Iterates: (1/5, 115), (3, -1). Dimension, number of iterations and solution: 3 3 1.0000 1.0000 1.0000 6 6 0.9999 ).0015 0.9952 1.0031 1.0043 0.9959 9 9 1. 0000 1. 0000 1.0000 1.0002 0. 9997 0.9998 1.0003 1.0005 0.9996
12 12 1.0000 1.0000 1.0000 1.0000 1.0001 1.0000 0.9998 0.9999 1.0000 1.0002 1. 0002 0 0 9998
15 14 1.0000 1.0000 1.0002 0.9996 1.0001 1.0003 1.0001 0.9998 0.9997 0.9998 1.0000 [ 1.0002 1.0003]1.0001 0.9996
3 -3 1 Inverse is -3 5 -2 .
1 -2 1
0.00 L...oo<=.L--------------'
0.00 4.00
Exercise 13.1.15

13.2.18
13.2.19
13.3.11 13.3.12 13.3.13 13.3.14 13.3.15 13.3.16 13.4.8
13.4.10
13.4.11
13.4.12
2.2361998, 2.2360750, 2.2360684; errors 1.3 x 10-4 , 7 x w-6 , 4.2 w- 7 •
Graphs are: (a) modified, (b) corrected Euler; (c) Heun, (d) RK4.
Ia) (b)
3.00 ~--------"]
(c)
Exercise 13.2.19 (a) Modified Euler; (b) corrected Euler; (c) Heun's method; (d) RK4.
2.25044. 2.23266. 2.23512. 2.23597. 2.236111, 2.236075. 2.236069.
4.00 (d)
y(0.5) = 1.00, y(l.O) = 1.25, y(1.5) = 1.75, y(2) = 2.50. y(0.5) = 1.1250, y(l.O) = 1.5117, y(1.5) = 2.1587, y(2) = 2.6753. Table of values: 1.1250 1.1259 1.1269 1.5117 1.5230 1.5278 2.1587 2.1659 2.1696 2.6753 2.5526 2.5155 Table of results: 1. 00000 1.00000 1. 00000 1.12744 1.12744 1.12744 1.52991 1.52991 1.52991 2.17128 2.17121 2.17120 2.50201 2.50189 2.50188
13.5.6
13.5.7 13.5.8 13.5.9 13.6.12
13.6.13
13.6.15
13.6.20
a = 0: y(2) = 2.50188, a = 1: y(2) = 6.54162 so a = -0.12424 and y(2) = 1.99999. Using N = 64 steps, a = 0.40758. y(O) = -0.09848. y(O) = -0.47018. 1. 0 1. 00000 1.5 2.0 1.85072 2.5 3.0 1.31634 3.5
1.60852 1.73548 0.69743
4.0 0.01516 4.5 -0.58953 5.0 -1.00000 0.0 1.00000 0.5 1.38174 1.0 1.48218 1.5 1.56891 2.0 2.00000 k = 1:
1 1 26.41145 2 31.04852 3 10.08828 4 -19.18904 5 -32.64635 6 -19.18904 7 10.08828 8 31.04852 9 26.41145 k = 1/2:
1 1 18.47002 2 21.71281 3 7.05492 4 -13.41926 5 -22.83020 6 -13.41926 7 7.05492 8 21.71281 9 18.47002 k = 1/4:
2 -42.73462 -50.23756 -16.32317
31.04852 52.82290 31.04852
-16.32317 -50.23756 -42.73462
2 -29.88512 -35;13207 -11.41510
21.71281 36.94004 21.71281
-11.41510 -35.13207 -29.88512
0.0 1.0000 0.9239 0.5 0.6065 0.5736 1.0 0.3679 0.3509 1.5 0.2231 0.2136 2.0 0.1353 0.1298 k = 118:
0.7071 0.4441 0.2735" 0.1670 0.1015
0.3827 0.2416 0.1494 0.0914 0.0556
0.0 1.0000 0.9239 0.7071 0.3827 0.5 0.6065 0.5681 0.4378 0.2377 1.0 0.3679 0.3459 0.2675 0.1456 1.5 0.2231 0.2101 0.1627 0.0886 2.0 0.1353 0.1275 0.0987 0.0538 k = 0.01: 0.0 1.0000 0.9239 0.7071 0.3827 0.5 0.6065 0.5623 0.4312 0.2336 1.0 0.3679 0.3413 0.2619 0.1419 1.5 0.2231 0.2071 0.1589 0.0861 2.0 0.1353 0.1256 0.0964 0.0522
259

260
Index
A-conjugate 204 Absolute error 7, 10
first-order estimates 10 Acceleration of convergence 40 Adams methods 224
Adams-Bashforth 224 Adams-Moulton 224
Adaptive quadrature 184 Aitken's !12 method 40 Aitken's iterated interpolation 110 Aitken's lemma 109 Alternating series 28
convergence test 28 Euler's transformation 29 truncation error 29
Approximation error 11 Arctangent series 23 Augmented matrix 70
B-spline 131 Back substitution 70 Backward difference 15
differentiation formulas 161 interpolation 112
Bairstow's method 62-5 algorithm 63
Bandwidth 239 Bernoulli's method 59 Biased exponent 5 Binary digit.. 1 Binary representation
floating-point 4, 5 integer 1
Bisection method 34 algorithm 35 convergence 35
Bit 1 Boundary value problems 234-47
diffusion equation 240 finite difference methods 239 linear differential equation 239 Poisson's equation 239 shooting method 234
Bracket 193 Bracketing 193
Central difference 15 differentiation formulas 160 interpolation 112
Characteristic polynomial 92 Chebyshev nodes 103 Chebyshev polynomials 103-4, 145
Clenshaw's algorithm 145 Cholesky factorization 77 Chopping 6 Chord 52 Clenshaw's algorithm 145 Complemented forms 1 Complete spline 126 Complex roots 62 Composite integration formulas 177 Condition number 82 Conjugate directions 204
minimization theorem 205 Conjugate gradient method 204
linear equations 87, 208 minimization 205
Continuous least squares 137 trigonometric 150 weighted 144
Convergence basic theorem 39 bisection method 35 function iteration 39 Newton's method 46
Convergence factor 42 Convergence rate 40
linear 40 quadratic 40 superlinear 53
Crank-Nicholson method 241 Crout reduction 76 Cubic search 194
Data error detection 20 Defective 92

Deflation 65 Degree of precision 187 Diagonal matrix 77 Diagonally dominant 87, 122 Difference operators, .::\,V, 6 15 Difference tables 17
accuracy checks 18 error detection and correction 20 formation 17 growth of error 20
Differences 15 backward 15 central 15 divided 105-6 forward 15 of polynomials 18
Differential equations 213-49 boundary value problems 234-46 diffusion equation 240 Euler's method 213-14 finite .difference methods 239 higher-order equations 231 initial condition 214 multistep methods 224 partial 239 Poisson's equation 239 predictor-corrector 225 Runge-Kutta methods 218 shooting methods 234 systems 231
Differentiation 160 Diffusion equation 240 Dimensionless 112 Direction field 214 Discrete Chebyshev approximation 153 Discrete Fourier transform 154 Discretization error 164, 214 Divided difference 52, 105
differentiation formulas 160 interpolation 106
Doolittle factorization 76-7 Double root 47
Eigenvalue 92 dominant 92 multiplicity 92
Eigenvector 92 Equations
iterative solution 34-57 linear systems 69 non-linear systems 47 polynomial 58
Errors first-order estimates 10 global 10 order 130
propagation 7 relative 7, 10 rounding, round-off 6 total 10 truncation 10, 26
Euclidean norm 82 Euler's method 213
corrected Euler 218 modified Euler 218 round-off error 215 systems 231 truncation error 214
Euler's transformation 29 Explicit methods 224 Exponent 4
bias 5 Extrapolation 101
Richardson extrapolation 166
Factorization of matrices 76-7 Fibonacci numbers 54, 59, 194 Fibonacci search 194 Finite difference methods 239-47
backward difference method 241 Crank-Nicholson 241 diffusion equation 240 forward difference method 240 linear ordinary differential
equation 239 Poisson's equation 239
Finite termination property 205 Fixed-point iteration 39
convergence 39 Floating-point representation 4
binary 4 error 6-7 exponent 4 fraction, mantissa 4 hidden, implicit bit 4 IEEE standards 4, 5 normalized 4 properties 7, 8
Forward difference 15 differentiation formulas 161 interpolation 111-12
Forward elimination 70 Forward substitution 78 Fourier coefficients 151 Fourier polynomial 151 Function iteration 39
acceleration 40 convergence 39 rate of convergence 40
Function norms 11
Gauss central difference formula 112
261

262
Gauss elimination 69 operation count 76 partial pivoting 71
Gauss-Seidel iteration 87 Gaussian quadrature 187
Gauss-Chebyshev 188 Gauss-Laguerre 190 Gauss-Legendre 188
Geometric series 23 differentiation and integration 23 truncation error 26
Gerschgorin's theorem 93 Global error 10 Global truncation error 214 Golden mean 53 Gradient vector 200 Gradual underflow 5
Heat equation 240 Hessian matrix 200 Heun's method 218 Hexadecimal 4 Hidden bit 4 Higher-order initial value problems 231 Hilbert matrix 138 Horner's rule 98-9
IEEE arithmetic 4, 5 double precision 4 single precision 4
Ill-conditioned 84, 138 Implicit bit 4 Implicit methods 224 Implicit trapezoid 224 Initial condition 214 Inner product of functions 143
weight function 144 Integer overflow 2 Integer representation 1 Integer types 3 Integer wraparound 2 Intermediate Value Theorem (IVT) 34 Interpolation 98, 118
Aitken's algorithm 109-10 backward difference formula 112 central difference formula 112 dimensionless forms 112 divided difference formula 106 forward difference formula 112 Lagrange 100 linear 100 polynomial 98-117 spline 118-36
Interpolatory quadrature 172 Inverse iteration for eigenvalues 92 Iterated interpolation 110
Iterative methods 34 bisection 34 convergence 39 linear equations 86
Iterative refinement 83
Jacobi iteration 86 Jacobian matrix 47
Knots 118 Kronecker 0 100
L1 , L2 , L= norms 11 Lagrange basis polynomials 100 Lagrange interpolation 100
error bound 103 remainder 103
Laguerre polynomials 147 Least squares approximation 137-59
continuous 137 discrete 153 normal equations 138 trigonometric 150 weighted 144
Least squares norm 11 Legendre polynomials 145 Line search 200 Linear convergence 40 Linear equations 69
conjugate gradient method 208 consistent 70 inconsistent 70 nonsingular 70 singular 70 square 70 triangular system 76 tridiagonal 121-2 underdetermined 72
Linear extrapolation 52 Linear interpolation 52 Lipschitz continuous 39, 214 Local truncation error 214 Logarithm series 23 Longint 3 Lower triangular 76 LU factorization 76
Machine unit 5 relative error 7
Mantissa 4 Matrix
augmented 70 defective 92 diagonally dominant 87 factorization 76 invertible 70
norms 82 positive definite 77 rank 70 singular 70 square 70 triangular 76 tridiagonal 121
Maximum norm 11, 82 MAXINT 3 Mesh points 239 Midpoint rule 173 Minimum energy property 130 Modified Newton method 200 Monic 104, 144 Multiple roots 47 Multistep methods 224-31
Adams-Bashforth 224 Adams-Moulton 224 algorithm 225-6 orders 224 predictor-corrector pair 225
Negation of integers 1 Newton interpolation
backward difference formula 112 divided difference formula 106 forward difference formula 112
Newton's method 45 convergencetheorems 46 derivations 45 failure 46 for optimization 200
modified 200 multiple roots 47 systems 47
Newton-Cotes formulas 173 Newton-Raphson 45 Nodes 100, 172
Chebyshev 103 Normal equations 138 Norms
offunctions 11 of matrices 82 of vectors 82
Not-a-knot condition 126 Numerical differentiation 160-71
difference formulas 160-1 discretization error 164 one-sided formulas 161 optimal steplength 164 Richardson extrapolation 166 round-off error 164 truncation error 164
Numerical integration 172-92 adaptive quadrature 184 composite formulas 177
degree of precision 187 Gauss-Chebyshev 188 Gaussian 187 interpolatory quadrature 172 midpoint rule 173 Newton-Cotes formulas 173
errors 173 nodes 172 number of intervals 178 quadrature weights 172 Romberg integration 182 Simpson's rule 173 trapezoid rule 173 undetermined coefficients J87 weighted 187
Objective function 193 Operation counts
Doolittle factorization 78 Gauss elimination 76 polynomial evaluation 98
Optimal steplength for differentiation 164
Optimization 193-212 bracketing 193 conjugate gradient method 204 cubic search 194 Fibonacci search 194 modified Newton method 200 Newton's method 200 quadratic search 194 single variable methods 193
Order of error 130 Origin shift 93 Orthogonal polynomials 143
Chebyshev 145 discrete 153 evaluation of expansion 144-5 Laguerre 147 Legendre 145 trigonometric 150
Overflow 5 Over-relaxation 87
Partial differential equations 239 Partial pivoting 71
multipliers 71 Periodic function 150 Permutation vector 71 Piecewise linear 118 Piecewise polynomial 118 Pivot 71
column 71 element 71
Poisson's equation 239
263

264
Polynomial equations 58-68 Bairstow's method 62-5 Bernoulli's method 59 complex roots 62 deflation 65 quadratic factors 62 recurrence relations 58-9
Polynomial evaluation 98 Polynomial interpolation 98-117
Aitken's algorithm 110 divided difference 106 error 103 finite difference 112 Lagrange 100 linear 100
Positive definite 77, 204 Positive definite quadratic function 204 Power method 92 Power series 23
truncation error bounds 26 Predictor-corrector methods 225 Propagation of error 7
Quadratic convergence 40 Quadratic factors 62 Quadratic search 194 Quadrature 172
Rank 70 Rates of convergence 40 Rayleigh quotient 92 Recurrence relation 58
homogeneous 58 linear 58 polynomials and 59
Relative error 7 machine unit and 7 propagation 7
Relaxation coefficient 87 Residual vector 82, 208 Richardson extrapolation 166
numerical differentiation 167 Romberg integration 182 Rounding, symmetric 6 Rounding error, round-off error 6 Runge-Kutta methods 218-24
classical 219 corrected Euler 218 Heun's method 219 modified Euler 218 systems 232
Search direction 200 Secant line 52 Secant method 52 Series 23
alternating 28-9 geometric 23 Taylor 23-4 truncation error 26, 29
Shift operator, E 15,29 Shooting methods 234-8 Shortint 3 Simpson's rule 173
adaptive Simpson quadrature 184 composite 177
SOR method 87 Splines 118-36
B-splines 131 complete 126 cubic 121 definition 118 end-conditions 121 error bounds 130 linear 118 minimum energy property 130 natural cubic 121 not-a-knot condition 126
Steplength 111 differentiation 164
Successive over-relaxation 87 Superlinear convergence 53 Support 131 Symmetric rounding 6 Systems of differential equations 231-2 Systems of linear equations 69-91 Systems of non-linear equations
Newton's method 47
Taxicab norm 82 Taylor series 23-4
truncation error 26 Taylor's theorem 24 Total error 10 Trapezoid rule 173
composite 177 Tridiagonal system 121, 239 Trigonometric polynomials 150
orthogonality 151 Truncated power function 130-1 Truncation error 10
alternating series 29 bounds for series 26 global 214 local 214
Two's complement 1 arithmetic 2, 3
Underdetermined 72 Underflow 5
gradual 5 Undetermined coefficients 187

Uniform norm 11 Unimodal 193 Upper triangular 76
Vandermonde matrix Vector norms 82
101
Weight function 144, 187 Wordlength, integer 1
types 3 Wraparound 2
265


















