ANGLE BRACING LATTICE TOWER
116
MAIN R EPORT: A NGLE BAR B RACINGS IN L ATTICE S TRUCTURES Martin Jespersen s071919 24th January 2011 Report no. 10-052 T ECHNICAL UNIVERSITY OF DENMARK
-
Upload
zaher-mhd-sharaf -
Category
Documents
-
view
273 -
download
13
Transcript of ANGLE BRACING LATTICE TOWER

MAIN REPORT:ANGLE BAR BRACINGS IN LATTICE
STRUCTURES
Martin Jespersen s071919
24th January 2011
Report no. 10-052
TECHNICAL UNIVERSITY OF DENMARK


1
UNDERGRADUATE STUDENT:
Martin JespersenStudent ID: S071919Technical University of Denmark (DTU)
PROJECT SUPERVISORS:
Peter Noe Poulsen Mogens G. NielsenAssociate Professor, Senior Cheif Consultant - M.Sc,Department of Civil Engineering Department of Masts and TowersTechnical University of Denmark (DTU) Ramboll Telecom - Northern Europe


3
PrefaceThis report was written as a bachelor project by which the author is to acquire the title:
Bachelor in Engineering (Civil and Structural Engineering)
The report is the result of a project work spanning from 30th August 2010 to 24thJanuary 2011 and is rated to 20 ECTS.
The total project consists of three pieces of material: A Main report (this docu-ment), a DVD with softcopies of all FEM-models and other material (attached to thisreport as Appendix F) and a Appendix report(separate document) containing documen-tation, which is not crucial for understanding the concepts of this report, but serves asfurther documentation of the project work. References to the Appendix report are givenas AR.X, X being the actual section in the Appendix report which is referred to.
The project was made in a cooperation between The Technical University ofDenmark(DTU) and Ramboll Telecom - Northern Europe.
The author would like to use this opportunity to thank supervisors and employeesat The Technical University of Denmark as well as Ramboll Telecom, whom havecontributed to the project work.
A special gratitude goes to Mr. Sankara Ganesh and the design team of Ramboll-IMIsoft Pvt. Ltd. India, whom have provided material for the project.
Lyngby, 24th January
Martin Jespersens071919


5
SummaryThis bachelor project considers the buckling of angle bar bracings in lattice towers.The ANSI/TIA-222-G:2005 tower design standard (in the following referred to asTIA-G) specifies various effective slenderness ratio expressions for angle bar bracingmembers dependent on the slenderness, eccentricity and end-restraints of the member.Especially provisions related to angle bar end-restraints are of a very general andsuperficial nature, even though the stiffness of a joint is totally dependent on itsdesign. The main scope of this project was to make a comparison between theeffective slenderness ratios acquired by above mentioned design code expressions andresults obtained by adding rotational stiffness results from detailed FEM-analysis of atype joint to a overall non-linear FEM-analysis of angle bar members. As a secondaryobjective a comparison between the commercial tower analysis programRAMTOWER and alternative methods such as hand calculations and the FEM was tobe conducted. Both comparisons were based on a sample telecommunications tower.
By comparing the effective slenderness ratios obtained from the FEM-analysis andTIA-G expressions, it has been observed that the non-linear FEM-analysis tends to ar-rive at a effective slenderness which is somewhat lower that what is obtained by theTIA-G standard in the case of weak-axis buckling. However the very limited amountof experimental data available on joint stiffness, would tend to suggest that the jointstiffness FEM-models applied in the current study over-predict the stiffness of joints,hence a effective slenderness ratio which is larger than what has been found from thecurrent studies may be expected, yielding ratios which are closer to the expressionsgiven in TIA-G when considering weak-axis buckling. The need of more specific ex-perimental data on joint rotational stiffness behavior is pointed out and areas in need offurther research are identified. The FEM-models indicate that there is a dependency inrotational stiffness of angle bar joints by the axis of rotation considered, a phenomenawhich is not currently taken into account in the TIA-G effective slenderness ratio ex-pressions, as it is the case for other tower design standards such as EN1993-3-1. Theeffective slenderness ratios obtained by FEM-analysis confirms that there is a differ-ence between the ratio, which should be applied for parallel and weak axis buckling,due to the difference in rotational stiffness about each axis considered (the two parallelaxis of the profile). Hence for parallel buckling the FEM-analysis arrives at effectiveslenderness ratios which exceeds the expressions given in TIA-G hence indicating thestandard be on the unsafe side in relation to parallel buckling of angle bar members.
Through extensive discussion it has been found that if FEM-models can be cali-brated (through more extensive experimental data) to fully capture the rotational stiff-ness behavior of angle bar joints, the application of rotational stiffness models to inves-tigate buckling failure of tower bracing members can be utilized commercially. Largescale infrastructure projects with great numbers of identical towers or marginally overutilized towers, where prospects of savings are considerable, has been identified as themain areas of application.
On the overall scale the comparison between RAMTOWER and other methods,showed that RAMTOWER performed as per previous experience, yielding no morethan 10% deviation in force distribution compared to equivalent FEM-models. By com-paring overall tower reactions found from each method, the incorporated wind profilein RAMTOWER has been found accurate and in accordance with the ANSI/TIA-222-G:2005 standard.

6
Based on these findings RAMTOWER is considered to produce an acceptable dis-tribution of forces, when comparing to the ease at which a tower model can be definedand analyzed in the program.
Through the sample tower models, which was required in order to perform theabove mentioned comparisons, the consequences of providing towers with non-triangulatedbracings was also experienced. From a detailed study with tower hip-bracings it wasfound that the application non-triangulated bracing should not occur in any tower de-sign, as it is also specified by the TIA-G standard.
Keywords: Buckling, Telecommunication towers, Joint slip, Lattice triangulation,Non-linear analysis, FEM

7
ResuméDette diplomafgangsprojekt omhandler udknækning af vinkeljern i gittertårne. Tårn-design standarden ANSI/TIA-222-G:2005 (i det følgende benævnt TIA-G) specifi-cerer flere udtryk til bestemmelse af den effektive slankhed for gitterkonstruktion-selementer afhængigt af deres slankhed, ekscentricitet og rand-betingelser. Specieltbestemmelserne der vedrører randbetingelserne for vinkeljern er meget generelle ogoverfladiske, til trods for at stivheden af samlingerne afhænger af deres udformning.Det overordnet formål med dette projekt var at lave en sammenligning mellem deførnævnte udtryk givet i standarden og resultater opnået under anvendelse af rotationsstivheder fundet ved en detaljeret FEM-analyse og siden hen påsat vinkeljern i en mereoverordnet ikke-lineær FEM-analyse. Et sekundært formål var at lave en sammen-ligning mellem det kommercielle tårndesign program RAMTOWER og andre metoderder indbefattede håndberegninger og FEM-analyse. Førnævnte sammenligninger blevbegge udført under anvendelse af et telekommunikationstårn. Ved at sammenligne deneffektive slankhed opnået under anvendelse af FEM-analyse og TIA-G standarden, erdet observeret at den ikke-lineære FEM-analyse har en tendens til at komme frem tileffektive slankheder der ligger lidt under det der er specificeret i TIA-G standardeni tilfælde med svag-akse udknækning. Dog viser det meget begrænsede omfang afeksperimentelt data der er tilgængeligt for stivhed af samlinger at FEM-modellerne,der er anvendt i dette projekt, overestimerer samlingens stivhed, og derfor kan en ef-fektiv slankhed der er større end hvad der er bestemt i dette projekt forventes, og somdermed også ligger tættere på de værdier der er givet i TIA-G standarden for svag-akseudknækning. Behovet for mere eksperimentelt data påpeges og områder der kræverforsat forskning er udpeget. FEM-modellerne indikerer at samlingsstivheden ved ro-tation afhænger af den betragtede rotationsakse, et fænomen der ikke er inkluderetved bestemmelsen af effektive slankheder i den nuværende TIA-G standard, som deter tilfældet i andre standarder såsom EN1993-3-1. FEM-analysen bekræfter at der eren forskel i de effektive slankheder, som bør anvendes for svag- og parallel-akse ud-knækning, grundet forskelle i rotationsstivheden omkring de to akser der betragtes forudknækning af vinkeljern (de to parallelle akser af profilet). FEM-analysen opnår ef-fektive slankheder der er højere end hvad der er foreskrevet i TIA-G standarden, ogindikerer dermed at udtrykkene givet i standarden er på den usikre side i forbindelsemed parallel-akse udknækning af vinkeljern. Gennem grundig diskussion er det fun-det at hvis FEM-modellerne kan kalibreres (gennem mere dybdegående forsøg medstivhed af samlinger) til at kunne skildre rotationsstivheden af vinkeljernssamlinger,kan rotationsstivhedsmodeller anvendes til at undersøge udknækning af gitterkonstruk-tionselementer på et kommercielt niveau. Større infrastruktursprojekter med et stortantal identiske tårne eller marginalt overudnyttede tårne, hvor udsigterne til en størrefinansiel besparelse er til stede, er identificeret som det primære anvendelsesområdefor metoden.
Sammenligningen mellem RAMTOWER og andre metoder viste de forventede re-sultater, hvorved afvigelsen i fordelingen af kræfter i gitteret mellem RAMTOWER ogFEM-analyse ikke var mere end 10 %. Ved at sammenligne de overordnet reaktioner fratårnet blev det fundet at det indarbejdede vind profil i RAMTOWER er tilstrækkeligt ogiht. ANSI/TIA-222-G:2005. Baseret på sammenligningens resultater betragtes RAM-TOWER som et program der giver acceptable resultater, når simpliciteten hvormed attårne kan defineres og analyseres tages i betragtning.
Gennem det telekommunikationstårn der blev anvendt til overnævnte sammen-ligninger, blev konsekvenserne af tårne med ikke-trianguleret gitter tydeliggjort. Fra et

8
detaljeret studie af anvendelsen af ikke-trianguleret “hofte-gitter” er det fundet at ikke-trianguleret gitter ikke bør forekomme i tårnkonstruktioner, som det også er specificereti TIA-G standarden.
Emner: Søjle udknækning, Telekommunikations tårne, Glidning i samlinger, Tri-angulering af gitter, Ikke-lineære analyser, FEM

9
ContentsPreface 3
Summary 5
Resumé 7
Terms and definition 11
Introduction 13
1 Column flexural buckling theory 151.1 Effect of boundary conditions on flexural buckling . . . . . . . . . . 161.2 Effect of load application on flexural buckling . . . . . . . . . . . . . 16
2 Buckling resistance according to ANSI/TIA-222-G:2005 192.1 Effective Yield stress [Section 4.5.4.1] . . . . . . . . . . . . . . . . . 192.2 Design axial compression strength [Section 4.5.4.2] . . . . . . . . . . 192.3 Effective slenderness ratio [Table 4-3 to 4-7] . . . . . . . . . . . . . . 202.4 Lattice web triangulation [figure 4-2] . . . . . . . . . . . . . . . . . . 23
3 Sample tower:40m Medium duty Tower Design 253.1 Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.2 Design loading . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.3 Hand calculation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4 RAMTOWER Analysis 29
5 Abaqus Joint FEM-analysis 315.1 Type joint description . . . . . . . . . . . . . . . . . . . . . . . . . . 315.2 Material properties . . . . . . . . . . . . . . . . . . . . . . . . . . . 315.3 Contact . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325.4 Steps, incrementation and output requests . . . . . . . . . . . . . . . 335.5 Boundary conditions . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.5.1 Boundary conditions at step: “Initial” . . . . . . . . . . . . . 355.5.2 Boundary conditions at step: “Establish bolt tension” . . . . . 355.5.3 Boundary conditions at steps: “Load - region 1”,“Load - region
2” and “Load - region 3” . . . . . . . . . . . . . . . . . . . . 365.6 Loads . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.6.1 Bolt load for tensioning of bolt . . . . . . . . . . . . . . . . . 395.6.2 Loading from test setup . . . . . . . . . . . . . . . . . . . . 40
5.7 Meshing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 415.8 Joint axial stiffness results . . . . . . . . . . . . . . . . . . . . . . . 425.9 Result testing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5.9.1 Mesh convergence . . . . . . . . . . . . . . . . . . . . . . . 445.9.2 Stress discontinuities . . . . . . . . . . . . . . . . . . . . . . 455.9.3 Bolt tensioning . . . . . . . . . . . . . . . . . . . . . . . . . 45
5.10 Joint rotational stiffness . . . . . . . . . . . . . . . . . . . . . . . . . 475.10.1 Modified material parameters . . . . . . . . . . . . . . . . . 47

10
5.10.2 Modified boundary conditions . . . . . . . . . . . . . . . . . 485.10.3 Modified loads . . . . . . . . . . . . . . . . . . . . . . . . . 485.10.4 Modified steps and incrementation . . . . . . . . . . . . . . . 495.10.5 Joint rotational stiffness results . . . . . . . . . . . . . . . . . 49
6 FEM-Analysis 556.1 Initial testing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
6.1.1 Simple linear-buckling of angle bar members . . . . . . . . . 556.1.2 Linear-buckling load when considering lateral support provided
by incoming members . . . . . . . . . . . . . . . . . . . . . 566.1.3 Buckling load for members with eccentric load application . . 596.1.4 Non-linear analysis . . . . . . . . . . . . . . . . . . . . . . . 59
6.2 Model description . . . . . . . . . . . . . . . . . . . . . . . . . . . . 636.3 Test runs of FEM-Models . . . . . . . . . . . . . . . . . . . . . . . 65
6.3.1 Effects of secondary bracings . . . . . . . . . . . . . . . . . 666.3.2 Effects of non-fully triangulated hip bracing . . . . . . . . . . 66
6.4 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
7 Comparison 737.1 RAMTOWER, hand calculation and FEM-results . . . . . . . . . . . 737.2 Buckling of members with joint stiffness results from FEM-analysis. . 76
8 Perspectives 83
9 Conclusion 85
A Literature 89
B Layout drawing: 40m Medium duty sample tower design 91
C Sample tower force distribution 95
D Examples on calculation of effective slenderness ratios based on ANSI/TIA-222-G:2005 standard and non-linear FEM results 99
E Abaqus type joint. 105E.1 Layout drawing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107E.2 Material hardening curves . . . . . . . . . . . . . . . . . . . . . . . 109E.3 Stress discontinuities in convergence model . . . . . . . . . . . . . . 111
F Digital Documentation 113F.1 Documents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113F.2 Abaqus FEM-models . . . . . . . . . . . . . . . . . . . . . . . . . . 113F.3 ROBOT FEM-models . . . . . . . . . . . . . . . . . . . . . . . . . . 113

11
Terms and definitionHip-bracing Secondary bracing fitted inside the tower section (connected between two
perpendicular diagonal members) to reduce the effective buckling length ofdiagonal members.
Plan bracing Internal horizontal bracing located at e.g. main member cross-over point,platforms or tower portions with large horizontal loading
Redundant member Refer to ’Secondary bracing’
Secondary bracing Bracing member in the latticed structure which is not consideredto carry any load, but only meant to reduce the effective buckling length ofprimary members(load carrying members)
Square cross section A tower with a square cross section refers to the tower havinga square shape in a section in the tower horizontal plane, e.i. tower has fourlegmembers
Staggered bracing Perpendicular bracings are connected to legmember at differentlevels as apose to non-staggered where perpendicular bracings are connectedat same level
TIA-G Refers to the structural design standard for antenna supporting structures andantennas: ANSI/TIA-222-G:2005
Web pattern Pattern formed by the bracing members of a tower


13
IntroductionWith the rapid increase in the global population and constant development withintelecommunications, the need of electrical transmission and telecommunication towersis greater than ever before. Especially in 3rd world countries these areas of infrastruc-ture are in growth. The most common and applicable tower design in these countries isthe angle bar tower, square based self supporting lattice towers with legmembers andbracings made from hot-rolled angle bar members.
Among the many advantages of the angle bar is its availability at suppliers, and theease at which it can be applied to form several types of lattice designs.
Due to the quantity of identical towers required to provide a infrastructure of e.g.power or telecommunication even small optimizations on the tower design can be jus-tified as economically sound.
One area of optimization is the effective slenderness ratio considered for bucklinginvestigation on tower angle bar bracings. The structural standard ANSI/TIA-222-G:2005 for telecommunication structures, provide designers with effective slendernessratio expressions which depend on the slenderness, eccentricity and end-restraints ofthe member under investigation. Especially provisions related to the angle bar end-restraints are of a very general and superficial nature, even though the stiffness of thejoints is totally dependent on their design.
The main objective of this project is to capture the rotational stiffness of a anglebar joint by application of a detailed FEM model. The joint rotational stiffness modelobtained from this analysis is then to be applied to a more overall non-linear FEM-analysis of various angle bar members, and the effective slenderness ratio based on thebuckling load of these members may then be compared with the TIA-G standard.
It should be stressed that it is not the scope of this project to develop new effectiveslenderness ratio expressions for the TIA-G standard. As it will be illustrated in thereport the current expressions on effective slenderness are very general and easy toapply for design calculations providing a fast and reliable result. The objective is ratherto investigate the gains by determining the effective slenderness of members, applied ingeneric designs to be produced in large numbers such as transmission tower designs orbackbone telecommunication infrastructure, by application of this alternative method.A secondary application is for design checks in relation to code revisions or increases intower design load. Rather than being forced to strengthen tower members, this methodcould provide a alternative which might declare a design safe if only a marginal extracapacity of the member is required.
As a secondary objective a comparison of the force distribution obtained by thecommercial toweranalysis program RAMTOWER and alternative methods such ashand calculations and the FEM is also to be conducted.
The project deals with a sample telecommunication tower, but results may also beapplicable for transmission tower designs.
The project starts off by recapping some of the basic principles related to flexuralbuckling of columns.
Next the overall provisions of the TIA-G standard is shortly presented and theirlimitations highlighted. From the TIA-G standard RAMTOWER and hand calculationsare performed on the sample telecommunications tower.

14
Following is then the detailed analysis of a type joint by use of the FEM-programAbaqus, from which a joint rotational stiffness model is acquired.
Finally a overall non-linear FEM-analysis of the sample tower is performed. On thebasis of buckling loads obtained from this analysis, effective slenderness ratios may becalculated and compared with equivalent TIA-G provisions.

15
1 Column flexural buckling theoryAxially compressed angle bar members are mainly subjected to 3 varieties of bucklingfailure:
• Flexural Buckling failure: Member fails by transverse deflection in a directionnormal to itself.
• Local Buckling failure: Member fails by local buckling of angle “leg” (refer tofigure 1).
• Flexural-Torsional Buckling failure: Member fails by simultaneous transversedeflection normal to itself and twisting around its own axis (shear center of thesection).
Later it will be shown why local buckling failure and flexural-torsional buckling is notrelevant in relation to this project, and only flexural buckling of the bracing membersis to be considered. It should be mentioned that because of this emphasis on flexuralbuckling, this type of failure may in the following just be referred to as buckling.
The development of the basic column buckling stability theory applied in today’sstandards, can to great extents be credited L.Euler (1707-1783). He originally solvedthe case of the axially loaded the build-in column and published his findings in a bookhe titled “Methodus inveniendi lineas curvas maximi minimive proprietate gaudentes”in 1744. The critical Euler load is determined by solving a differential equation of thedeflection curve for an axially compressed column. The differential equation leads to ageneral solution, which contains some integration constants. These constants are thendetermined based on the boundary conditions of the column. The general expressionfor determining the critical load (Euler’s formula) for an ideal column is given by:
Fcr = FE =π2 ·E · I
l2e
(1)
In this expression le refers to the effective buckling length of the ideal column,which is governed by the boundary conditions. Effective column lengths are in generaldetermined by use of Engineering references, but as it will be shown later this is notalways sufficiently accurate, since the boundary conditions of a column are not ideal inthe real world.
Some also prefer a alternative expression of the Euler’s formula
Fcr = FE =(kl)2 ·E · I
l2 (2)
where the value of kl is governed by the boundary conditions of the column.

16
Figure 1: Principal axis definitions for buckling for angle bar members
1.1 Effect of boundary conditions on flexural bucklingOne area of special interest when considering buckling of bracing members is the endrestraints which are provided. From the traditional buckling stability theory the buck-ling capacity of columns is dependent on the effective column length, as it is incorpo-rated in the expression for the critical load as shown in expression (1). The effectivecolumn length is as mentioned dependent on the type of restraint, which is provided atthe column ends. For a lattice structure such as a angle bar tower, designers are oftenforced to deviate from the classical ideal restraint conditions for which the effectivethe column length is well defined and resort to effective lengths which are for the mostpart developed on the basis of experimental data. Lorin and Cuille (1970) were someof the first to deal with these issues, proving that the stiffness of end gusset plates hasa enormous effect on the buckling capacity of the member, whereas the strength of thegussets is to some extent irrelevant.Evaluation of end-restraint stiffness is very difficult to include in structural standards,since design possibilities are unlimited, thus today’s standards only deal with simplecriteria when including effects from end-restraints. These are described in section 2 ofthis project.
1.2 Effect of load application on flexural bucklingDue to the nature and application of the angle bar member in a lattice structure, concen-tric loading of the member is often not possible, especially not for single angle bracingmembers. Connecting the bracing members to other structural components is typicallyachieved by bolting or welding the angle bar member by one leg. This type of connec-tion naturally generates some eccentricity in the load transfer from one member to theother. When considering slender axially loaded members, the effect of this eccentric-ity on the critical buckling load varies with slenderness. The effects of eccentric loadapplication on beam-columns1 has been treated by e.g. Timoshenko in [17]. Results
1It is a necessity to consider the member as a beam-column since it is loaded by moment

17
will briefly be presented below, since they are strongly tied to the provisions of today’sstructural standards.
Determining the critical buckling stress of an eccentrically loaded beam-columnis based on the Secant formula. Basically we are seeking a critical stress σc.Y P, forwhich the extreme fibers in the beam-column reaches the yield point stress σY P, by theexpression:
σY P = σc.Y P ·(
1+es· sec
(l
2r
√σc.Y P
E
))(3)
In the Secant formula given by expression (3), e is the eccentricity of the appliedaxial compression force, s is the core radius2, l is the geometric length, r is the radiusof gyration and E is the modulus of elasticity. By utilizing the Secant formulation,curves for the critical stress dependent on the slenderness of the beam-column can bedeveloped for various eccentricities(quantified as a ratio to s) as it is done in figure 2a.It should be noted that expression (3) only applies for members with same eccentricityin load application at both ends. Timoshenko also deals with the case of beam-columnssubjected to load application with different eccentricities at the ends, expressing themby the ratio β = ea
eb, where ea and eb are the eccentricities at the ends. In the case of
varying eccentricities the critical stress σc.Y P is given by:
σc.Y P =σY P
1+ eas ψcosec(2u)
(4)
where2u = kl = l
r
√σY PE and ψ =
√β 2−2βcos(2u)+1
For tower bracings this expression is mostly relevant in the case where β = 0 cor-responding to a load application which is concentric at one end and eccentric at theother. This would be the case for buckling of a member which is continuous at oneend and connected to other structural members by the methods previously describedat the other end. Buckling curves for member with β = 0 is given in figure 2b. Bothfigures are based on and elastic modulus of 210.000MPa and a yield point stress ofσY P = 250MPa. For reference the buckling curve for the corresponding TIA-G caseis included in both figures, refer to section 2 here on. It should be mentioned that thecurves in TIA-G also includes imperfections and thus a complete comparison can notbe made. Also the expression 4 is not defined for β = 0, thus only values very close toβ = 0 can be applied.
2Core radius s = ZA , where Z is the section modulus and A is the cross-sectional area.

18
100
150
200
250
300
F cr[M
pa]
Buckling curves for eccentrically loaded column, β=1
lr e/s=1
lr e/s=0,5
lr e/s=0,2
lr e/s=0,1
Euler
TIA‐G curve 3
0
50
100
150
200
250
300
0 20 40 60 80 100 120 140 160 180 200 220
F cr[M
pa]
Slenderness L/r [-]
Buckling curves for eccentrically loaded column, β=1
lr e/s=1
lr e/s=0,5
lr e/s=0,2
lr e/s=0,1
Euler
TIA‐G curve 3
(a) Buckling curve for β = 1
100
150
200
250
300
F cr[M
pa]
Buckling curves for eccentrically loaded column, β=0
lr e/s=1
lr e/s=0,5
lr e/s=0,2
lr e/s=0,1
Euler
TIA‐G curve 2
0
50
100
150
200
250
300
0 20 40 60 80 100 120 140 160 180 200 220
F cr[M
pa]
Slenderness L/r [-]
Buckling curves for eccentrically loaded column, β=0
lr e/s=1
lr e/s=0,5
lr e/s=0,2
lr e/s=0,1
Euler
TIA‐G curve 2
(b) Buckling curve for β = 0
Figure 2: Critical load curves for beam-column with various ratios of es compared to relevant
TIA-G buckling curve. Material parameters: fy = 250MPa and E = 210.000MPa

19
2 Buckling resistance according to ANSI/TIA-222-G:2005In this section the current practice for determining the design compression strength ofangle bar members in accordance with to the ANSI/TIA-222-G:2005 structural stan-dard is reviewed (In the following referred to as TIA-G).
The initial part of this section introduces some of the key provisions given in theTIA-G standard, which may be considered to be specifically directed towards designof lattice towers and thus outside traditional structural engineering.References to the TIA-G standard is enclosed by [], throughout this section.
2.1 Effective Yield stress [Section 4.5.4.1]In order to avoid local buckling of the angle bar leg, TIA-G considers an effective com-pression yield stress F ′y , dependent on the width to thickness ratio
(wt
)of the member.
The characteristic yield stress Fy is reduced in order to obtain F ′y by the followingprinciple:
wt≤ 0.47
√EFy
F ′y = Fy
0.47
√EFy
<wt≤ 0.85
√EFy
F ′y =
1.677−0.677
wt
0.47√
EFy
·Fy
0.85
√EFy
<wt≤ 25 F ′y = 0.0332 ·π2 · E(w
t
)2
According to the standard the width to thickness ratio should not exceed 25.
2.2 Design axial compression strength [Section 4.5.4.2]The design axial strength of a member in compression is given by:
P = Pn ·φc
where
Pn = Ag ·Fcr
φc = 0.9
and for λc ≤ 1.5
Fcr =(
0.658λ 2c)·F ′y
and for λc > 1.5
Fcr =
(0.877
λ 2c
)·F ′y

20
where
λc =K ·Lr ·π·√
F ′yE
Ag = gross area of member [mm2]K = effective length factorL = laterally unbraced length of member [mm]r = governing radius of gyration about the axis of buckling [mm]
It should be noted that KL is equivalent to the effective buckling length le. Thestandard furthermore stipulates that flexural-torsional buckling need not be consideredfor single or double angle bar members.
2.3 Effective slenderness ratio [Table 4-3 to 4-7]TIA-G considers various effective slenderness ratio
(KLr
)expressions for tower com-
pression members. Expressions for angle bar members are given in table 4-3 and 4-4of the standard. They are divided into 2 groups: One considering legmembers andone considering bracings. For legmembers two separate expressions are given for eachtype of profile (angle bar or round), dependent on whether or not the bracing pattern isstaggered or symmetrical (non-staggered) . Buckling of legmembers will not be treatedfurther in this project.
For bracing members the effective slenderness ratio is governed by either the end-restraint or eccentricity by which the member is loaded. If the bracing is not slender(L
r < 120), eccentricity is considered governing and bracing effective slenderness ra-
tio is given by member eccentricity conditions. If the bracing is slender(L
r ≥ 120),
bracing end-restraints is considered governing and bracing effective slenderness ratiois given by end conditions of the member, i.e. the degree of rotational restraint. Thisconcept is in good agreement with the results from the Secant formula in figure 2. Theeffective slenderness ratio expressions are illustrated graphically in figure 4a.
The standard links these eccentricity and end-restraint parameters with the 6 differ-ent expressions for the effective slenderness ratio of bracings, by a very basic principleas given in table 1. On the specific definitions of normal framing eccentricities, partialrestraint against rotation a.s.o. the reader is referred to the standard. Table 1 illus-trates that the end-restraint parameters are very general and superficial, even thoughthe actual stiffness provided by the joint at the ends is totally dependent on the design.It is this very basic set of parameters which are going to be challenged by attempt-ing to determine the actual rotational stiffness of joints by application of a type jointFEM-model.
The effective slenderness ratio is applied in the design expressions given in theprevious subsection 2.2, and a buckling curve as illustrated on figure 4b is obtained.The buckling curve is seen to resemble the curves given comparative standards such asEN 1993-1-1 (column curve b for angle bars).

21
Figure 3: Is the buckling resistance of angle bar members with these end-restraints (connections)the same? Yes according to the TIA-G standard. 2 bolts (left), 3 bolts (center) andwelding (right)
Curve Slenderness Parameter Effective slendernessexpression
1(L
r < 120)
Concentric at both ends. KLr = L
r
2(L
r < 120)
Concentric at one end and normalframing eccentricity at the other.
KLr = 30+0.75 · L
r
3(L
r < 120)
Eccentric at both ends. KLr = 60+0.50 · L
r
4(L
r ≥ 120)
Unrestrained against rotation. KLr = L
r
5(L
r ≥ 120)
Partially restrained against rotationat one end and unrestrained at the
other.
KLr = 28.6+0.762 · L
r
6(L
r ≥ 120)
Partially restrained against rotationat both ends.
KLr = 46.2+0.615 · L
r
Table 1: Parameters for selection of relevant effective slenderness ratio expression for bracingmembers in TIA-222-G:2005 (Curve 1 to 6 refers to the curves in figure 4a)

22
0
20
40
60
80
100
120
140
160
180
200
220
0 20 40 60 80 100 120 140 160 180 200 220
Effect
ive s
lendern
ess
KL/
r [-
]
Slenderness L/r [-]
Effective slenderness ratio for angle bar bracings according to table 4-4 TIA-222-G:2005
Curve 1/Curve 4
Curve 2/Curve 5
Curve 3/ Curve 6
End‐restraint governs
Eccentricity governs
(a) Effective slenderness ratio to be considered for flexural buckling of bracingsas per TIA-222-G:2005. Curves 1 to 6 refers to the expressions in table 1.Dashed red line indicates the transition from eccentricity to end-restraints be-ing governing.
100
150
200
250
300
F cr[M
pa]
Critical buckling stress Fcr:TIA-G buckling curve vs. Euler load
TIA‐222‐GEulerEN 1993‐1‐1
0
50
100
150
200
250
300
10 30 50 70 90 110 130 150 170 190
F cr[M
pa]
Effective slenderness KL/r [-]
Critical buckling stress Fcr:TIA-G buckling curve vs. Euler load
TIA‐222‐GEulerEN 1993‐1‐1
(b) TIA-G buckling curve compared to Euler and EN1993-1-1. Material parame-ters: fy = 250MPa and E = 210.000MPa
Figure 4: Graphic representation of provisions in TIA-G in relation to flexural buckling

23
2.4 Lattice web triangulation [figure 4-2]Several tower design standards such as TIA-G (but also EN 1993-3-1) states that thelattice web patterns should be fully triangulated in order to avoid bending considera-tions. If e.g. secondary bracings in hip or plane web patterns are not fully triangulatedthey can not be considered to prevent buckling in their own plane (without bendingconsiderations). Non-triangulated web patterns are in general not recommended forlattice tower design, however they do occur either due to negligence or for practicalreasons. Examples of triangulated and non-triangulated patterns are given in figure 5for hip bracings, and are basic examples from TIA-G.
(a) Typical locations of lattice hip bracing (Sec-tion A-A)
(b) Triangulated hip bracing (c) Non-triangulated hip bracing
Figure 5: Examples of triangulated and non-triangulated bracings as per TIA-G


25
3 Sample tower:40m Medium duty Tower Design
In order for the project to be as specific as possible a Medium duty Tower Designwas considered. This would not only give an impression of the possible gains by themethods developed through this project, but also keep the project at a level at which themethods developed are practically realistic to implement for future design calculations.Finally the sample tower design could contribute with a realistically proportioned towerin regards to member sizes, joint details and outer geometry.In the following the sample tower is shortly described and in the last part of the sectiona traditional hand calculation of the sample tower is presented. This will not onlyillustrate the application of the TIA-G standard described in section 2, but also thetraditional methods which has been applied before more computational methods wereintroduced to the design of lattice towers. Finally the hand calculations were also toserve the comparison of force distribution with results given by RAMTOWER.
3.1 DescriptionThe sample tower is a 40m so-called “Medium duty” tower, medium referring to itsequipment bearing capacity. It consists of 13 sections, with non-staggered X-bracingpatterns. The 4 top sections are parallel in order to accommodate fixture of telecommu-nication equipment. The 3 bottom sections are fitted with several secondary bracings,including internal hip-bracing.
If the hip-bracing is studied more closely it is seen to conflict with the provisionsin TIA-G in regards to complete triangulation of the lattice web pattern. Consequencesof this will be illustrated and discussed at a later stage of the project.
A overall layout drawing of the tower is included as Appendix B
3.2 Design loadingThe design load on a telecommunication tower is typically dominated by loads relatedto wind. Other than wind load from the tower body itself, loads from appurtenancesis also considered. Since the wind load on tower body is usually considered to bemandatory, the appurtenance loads are often referred to as the design load of the tower.The effective projected windarea of the appurtenances originally considered for thedesign of the sample tower is given in table 2.
Effective projected wind areas are found by rough estimates described in Rambollinternal note by Mr. Ulrik Støttrup-Andersen. Exact wind load from appurtenances isdependent on the type and supplier, and should in any case be determined consideringthe actual load-configuration of the tower.Furthermore it is brought to the attention of the reader that the sample tower is origi-nally designed according to Indian Standards (IS), and therefore a full utilization of thedesign should not be expected, since the considered wind speed in this project is lowerthan what was originally considered. The project at hand only deals with the effects ofdifferent approaches to design of towers, hence a full utilization of the tower is not arequirement, only realistic distribution of loads and tower proportions.

26
Load description Level Shielding Effective projectedwind area (EPA)
1 No. 2.4m Dia. MW DishAntenna
(Standard Antenna w. Radome)38.75m 0% 4m2
1 No. 1.8m Dia. MW DishAntenna
(Standard Antenna w. Radome)38.75m 30% 1.6m2
5 Nos. 1.2m Dia. MW DishAntenna
(Standard Antenna w. Radome)31.25m 50% 4m2
3 Nos. CDMA Panel Antenna(2.62mx0.37m) 33.75m 0% 3m2
9 Nos. GSM Panel Antenna(1.917mx0.262m) 33.75m 30% 3.78m2
Cable & Access Ladder(Along tower center line) 0−35m Complete
shieldingfrom
35-40m
0.3 m2
m
Table 2: Sample tower design load
3.3 Hand calculationIn relation to this project a complete design calculation of the sample tower in ac-cordance with TIA-G was made “by hand” in the computer software “MathCad”. Thecalculation was performed under the assumption that the tower is statically determinate3D truss. The calculation served two purposes:
• Approximate reference values for check of force distribution in the FEM-Modeland RAMTOWER
• Illustrate the differences in assuming a static determinate 3D structure and astatic indeterminate 3D structure (comparing traditional methods with more ad-vanced computational models).
The calculation only considers windload from a 0 degree direction (refer to figure 6),sometimes also referred to as the normal direction. It should however be noted that tow-ers should be designed for several different wind load directions (and combinations).In the case of towers with square cross sections a 45 degree wind direction should alsobe considered. Usually the 0 degree wind load case will govern the design of bracings,whereas the 45 degree case will govern the design of legmembers (and foundations),however all members should be checked for both cases.
A more thorough study of these calculations is left to the reader, but the results ofthe calculation will be applied for comparison with RAMTOWER at a later stage.The complete calculation is attached this project as Appendix AR.D

27
Figure 6: Relevant wind load directions for design of towers with square cross sections.


29
4 RAMTOWER® AnalysisRAMTOWER® is a commercial software developed by Ramboll Telecom for the de-sign and analysis of self-supporting lattice towers. The program features analysis oftowers with triangular or square cross-sections, composed of a wide variety of latticeand member types.
Other than the force distribution performed by the RAMTOWER analysis, whichwas going to be compared with other methods, the analysis was also used to establishwind areas of the tower body, to be applied in the hand calculation of the sample towerpreviously described. Large deviations between the RAMTOWER analysis and handcalculation is not expected, since both methods assume that the tower is a staticallydeterminate structure.
The basic assumptions and analysis concept of RAMTOWER is shortly describedin the following:
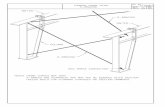
RAMTOWER is a Visual Basic Application (VBA) based tower analysis and de-sign software. The program considers the tower as a cantilever beam(free at one endand fixed at the other) with relevant loads(it be horizontal or vertical from tower body,appurtenances, ice etc.) applied at relevant levels. For this beam model is then cal-culated moment, shear and normal force at the top and bottom of each tower section,upon which axial forces in section members (by equilibrium equations at the center ofeach section) is determined. RAMTOWER can consider sections containing multiplediagonal members (of same profile type), determining member forces only for the bot-tom member of the section. All this is done while assuming that the tower lattice isstatically determinant, a assumption which is not always correct since a tower some-times contain horizontal or other members yielding it statically indeterminate. Duringthe development of RAMTOWER thorough comparisons with FEM-models were per-formed and these yielded no more than 10% deviation in distribution of section forces.RAMTOWER is programmed with common structural standards within the telecom-munication tower industry incorporated, defining wind-profiles, buckling curves, ice-loads, default safety factors and material parameters. On several occasions throughoutits more than 12 years of existence3, RAMTOWER has proved itself as a simple andfast tool, obtaining results with good accuracy.
The analysis of the sample tower was performed according the TIA-G standard,when considering buckling curves, safety factors etc. Two different RAMTOWERanalysis were performed: One with a model loaded by the windprofile which is definedwithin the program for the TIA-G standard and another model considering point loads,related to wind on the tower body and appurtenances found in the hand calculation,defined at the relevant levels in the RAMTOWER model. The differences betweenthe results obtained from these two models are treated in section 7. For the modelwhich applied the incorporated wind profile, wind load from secondary bracings had tobe calculated by hand and then included as additional section wind areas, since RAM-TOWER can not consider bracing patterns containing secondary members. Calculationof the additional wind load from secondary bracings is given in Appendix AR.C. Forboth models the restraint against buckling provided by the secondary bracings had tobe taken into account by effective column length reduction factors in the analysis. Aautomatically generated design report from RAMTOWER is given in Appendix AR.Aand AR.B for each of the two models considered.
3RAMTOWER was initially introduced with the name XLMAST

30
Figure 7: Illustration of RAMTOWER program concept

31
5 Abaqus Joint FEM-analysisIn order to obtain end-restraint stiffness values to be applied in buckling analysis ofangle bar bracing members, a more detailed FEM-analysis of a type joint was per-formed. The analysis was executed in the FEM-program Abaqus/CAE version 6.10-1.A soft-copy of each Abaqus FEM-model is given in Appendix F.
5.1 Type joint descriptionWhen selecting the layout of the joint, which was to be applied in order to capturethe stiffness behavior of typical angle bar tower bracing connections, there was onedeciding factor. During the literature study a article by N. Ungkurapinan et. al. [12] ina very thorough manner described the experimental study of joint slip4 in bolted anglebar connections under axial load. In relation to this study a idealized stiffness curvefor joints with very specifically described parameters had been developed based on theexperimental results. Using this idealized curve for the axial stiffness behavior of thejoint, the FEM-model could be calibrated to confirm this data, thus increasing overallreliability of the model. This would also indicate any limitations of a simple FEM-model w.r.t. the actual psychical behavior of a angle bar connection. When the axialstiffness of the type joint corresponded to the experimental data, the FEM-model couldbe modified to consider the rotational stiffness, which would be of greater interest forangle bar buckling considerations.
The layout of the Abaqus model which reflects the test setup applied in [12] isillustrated in figure10. A drawing of the setup with measurements is given in AppendixE. Note that Abaqus visualizations applies the coordinate system X-Y-Z (axes coloredred, green and blue respectively), however for in- and output in Abaqus this is referredto as direction 1-2-3. This number coordinate system is applied in the following.
The joint consists of two angle bar members overlapping leg to leg, with 2 boltstransferring angle bar axial loads through shear. Parameters given in table 3, all effect-ing the joint stiffness according to [12], was considered. All these parameters reflectedthe assumptions of the experiments performed in [12]. Further parameters are given inthe subsequent sections.
Parameter ValueBolt size M16
Hole clearance 1.6mmBolt torque 114.27kNmm
Angle bar type L100x100x6
Table 3: Joint parameters effecting stiffness applied in FEM-model
5.2 Material propertiesFor defining material properties, two literature resources were used. In [12] basic ma-terial property data from material testing is provided for both angle bars and bolts. Itwas considered to be necessary to use this data in order to obtain results which may becompared with [12]. Several different material models were considered:
4Joint slip is defined as the sudden motion, due to a loss in friction provided by bolt tensioning, madepossible due to bolt in holes with clearance

32
• Linear-elastic (In the following referred to as “Elastic”)
• Linear-elastic - perfect plastic (In the following referred to as “Perfect plastic”)
• Linear-elastic - plastic w. hardening (In the following referred to as “Plastic w.hardening”)
Hardening and other plastic behavior of the material was not described in [12] and wastherefore based on experimental data by Dick-Nielsen and Døssing [7]. Dick-Nielsenet. al considered several steel material types with certificates retrieving material modelsfrom them by application of reverse engineering:
The test specimens (in [7]) were applied in normal tension testing, and the resultsfrom this consisted of displacements at different force levels exerted on the specimens -A test specimen work curve. By use of a FEM-model of the test setup material modelswere continuously modified until displacements for different force levels matched thework curve retrieved from the material testing. The results of the material testing byDick-Nielsen et. al. is referenced in Appendix E.2. For the angle bar members materialdata on hardening of S355 was applied, which was in good agreement with the overallmaterial properties of the angle bars described in [12]. For the bolt material experimen-tal data on hardening of grade 10.9 bolts was used. It should be noted that this gradehas a tensile strength which is somewhat higher than the bolts used in [12], howeverthis is considered to be of minor importance, since most deformation (from yielding)is expected from local yielding in angle bar holes (Refer to later discussion in sub-section 5.8). For the linear-elastic properties of the material a E-modulus of 215GPa(corresponding to test results in [12]) and a Poisons ratio of 0.3 was considered.
The material model, from the data collected by Dick-Nielsen et. al, was omittedin tabular data, from which Abaqus can interpolate (linearly) for any given yield stressstate. If plastic strains exceed the tabulated data, Abaqus assumes the yield stress to beof same magnitude as the last tabulated yield stress for any plastic strain (larger thanthe last specified). This last property was used for defining the perfect plastic model,were reaching yield stress of the material results in “unlimited” plastic strains.
Residual stresses (from rolling of angle bar member, punching of holes etc.) wasnot included in the model.
A frictional coefficient of 0.4 was considered for the angle bar and bolt surfaces.According to [4] frictional coefficients smaller than 0.2 should not be considered inAbaqus, since serious convergence problems may occur. The friction coefficient of 0.4corresponds to the provisions of EN1090-2 for metalized surfaces (Class B surface).
5.3 ContactModeling the contact between the different model parts is one of the most criticalprocesses. If contact is improperly modeled, results of the analysis will most definitelynot reflect the real life behavior of the joint. The model consist of various surfaces incontact . These can be categorized as:
• Contact between bolt head, nut and shank to the surface of the two angle barmembers and their holes.
• Contact between the angle bars
The contact surfaces may be viewed in figure 8. A contact pair in Abaqus consist of2 surfaces, one referred to as a slave and the other a master. The major difference be-tween these two is that the slave surface may not penetrate the master, but the master

33
(a) Bolt head, nut and shank contact surface
(b) Angle bar contact surface for bolt head, nutand shank
(c) Angle bar to angle bar contact surface
Figure 8: Model contact surfaces (colored red)
can penetrate the slave surface (between the nodes of the slave surface), thus it is rec-ommended5 that the slave surface is the more finely meshed of the two surfaces. Inthe case of contact between the bolt and angle bar surfaces, the bolt was defined as themaster surface and the angle bar made slave. In the case of the contact between the twoangle bars, one of the angle bars was of course to be of master type and the other ofslave type.
The master and slave surface is gathered in a interaction6, to which is assigned ainteraction property. In this case two relevant properties were considered: Tangentialand Normal behavior of the contact surface interaction. For tangential behavior wasdefined a frictional coefficient of 0.4 and the allowable elastic slip, refer to [4], was setto a absolute distance of 0.05mm with zero stiffness. Normal behavior was defined as“hard”. This property assumes that constraints related to contact can only occur, whenthe surfaces are touching (no sticking between the contact surfaces).
5.4 Steps, incrementation and output requestsDue to the nature of the joint FEM-model, serious care had to be taken when organizingsteps and increments in order for the model solution to converge. Especially during thejoint slip serious convergence problems may occur. Due to the hole clearance and bolttensioning, the joint will experience a slip as it goes from a friction to a bearing typejoint. At this critical stage the analysis tends to abort with errors, since it does notrecognize that the slip has a definite motion governed by the clearance of the jointholes, but labels it as a infinite motion with zero stiffness to achieve equilibrium (rigid
5In [4].6In this case a total of 5 interactions were defined in the model: 4 containing the bolt contact between the
area in and around each angle bar hole and 1 containing the contact between the angle bars.

34
Figure 9: Springs between bolt and hole for convergence during slip. Angle bar material isshaded and bolt material crossed. Cut through bolt shank(left) and cut through theentire length of the bolt (right).
body motion). In order for the FEM iterations to converge the following steps (otherthan the mandatory “initial step”) were applied:
• “Establish bolt tension” - Bolt tension is established by applying bolt load.
• “Load - region 1” - Load until joint is close to slipping.
• “Load - region 2” - Close to constant load during joint slip.
• “Load - region 3” - Continue loading with bolts in bearing.
This stepwise analysis of the joint ensured that for the critical part of the analysis (atjoint slip), step incrementation was very detailed and for remaining parts of the analy-sis, were iterations easily converges, incrementation was more coarse. However mod-ifying the incrementation of the the analysis, was not completely adequate to meet aconverged solution. Convergence problems are almost inevitable at the joint slip, sinceAbaqus in this critical phase considers a very small change in stress to cause infinitedisplacements (since slope of work curve in this region is zero, refer to figure 14). Ifhowever a small stiffness is included, the analysis does not continue to divide timeincrements until they are infinitely small, but obtains a solution. To introduce somestiffness to the joint slip region, 12 small springs with a stiffness of 30N/mm wereprovided between each of the bolt shanks and the surface of the holes as illustrated onfigure 9. The springs provide the work curve with a negligible, slope during the jointslip. It should however be pointed out that non-converged analysis of the model indi-cates that the slope of the work curve goes towards zero before analysis is interrupted.The loading in each step was determined by methods described later in this section.In order to retrieve joint slip curves to compare with the experimental data available(idealized curve from [12]), history output requests were defined for certain nodes inthe model. These locations may be viewed on figure 10.
For the nodes was requested translations in the direction 3 during all increments ofthe analysis (Axial direction of the joint - Abaqus variable: U3).

35
Figure 10: Nodes for displacement history output requests (marked by red dots)
5.5 Boundary conditionsIn this subsection the boundary conditions, that is the displacement degree of freedom(dof) on the boundary of the model, is described. In the following a restrained dofrefers to the dof having a prescribed displacement of 0, corresponding to a supportin that dof direction. The boundary conditions of the model varies with each of thepreviously described analysis steps, and are described for each step in the following:
5.5.1 Boundary conditions at step: “Initial”
In the initial step all parts in the model, had to be restrained in order for the analysis torun. This meant:
• Bolt center restrained in direction 1
• Bolt head and nut restrained in direction 2 and 3
• Angle bars restrained at edges in direction 1, 2 and 3.
In figure 11 the boundary conditions for the step may be viewed.
5.5.2 Boundary conditions at step: “Establish bolt tension”
In this step the tensioning of the bolts was applied and to avoid disturbances the bound-ary conditions were eased to:
• Bolt head and nut restrained in direction 2 and 3
• Angle bars restrained at edges in direction 1, 2 and 3.
Hence the boundary conditions for this step is the same as in figure 11, except therestraint at bolt center is removed.

36
5.5.3 Boundary conditions at steps: “Load - region 1”,“Load - region 2” and“Load - region 3”
In this step the tensioning of the bolts can be considered to restrain the bolts and there-fore further restraints are not required. Furthermore the angle bars are connected toeach other by friction from normal stresses provided by the bolt tension. All the pre-viously described boundary conditions may be substituted, by boundary conditionswhich reflect the actual test setup given in [12].
For the test setup, both ends of the type joint may be considered to be restrainedagainst displacements out of the joint plane (due to the plates from the compression testmachine). In order for the model to be of type “plane stress”, restraints out of the jointplane was only provided in the direction of the angle bar leg, as illustrated on figure12a. In the axial direction of the joint, restraint was applied to the unloaded joint end.Boundary conditions for the model in steps: “Load - region 1”,“Load - region 2” and“Load - region 3”, may be viewed in figure 12b.

37
(a) BC’s for bolt in step “Initial”
(b) BC’s for angle bar in step “Initial” (Only one angle bar shown)
Figure 11: Boundary conditions(marked orange) for step: “Initial”

38
(a) Directional concept of out-of-plane restraint at the sup-ported ends of the type joint (unloaded end shown).Arrows mark the supported direction.
(b) BC’s on model for steps: “Load - region 1”,“Load - region 2” and “Load - region 3”
Figure 12: Boundary conditions(Marked orange) for steps: “Load - region 1”,“Load - region 2”and “Load - region 3”

39
5.6 Loads5.6.1 Bolt load for tensioning of bolt
The joint bolts were modeled as a solid bolt model (with head and nut) a methodrecommended by Jeong Kim et. al. in [8] to give the best imitation of real bolt behavior(although larger computational effort is required). The magnitude of the force whichis imposed by the prescribed torque (listed in table 3) was calculated on the basis offormulas given in [15]:
FM =2MA
1.155µGd2 +µKDkm + Pπ
(5)
where for a M16 bolt:MA is bolt installation torque, MA = 114.27kNmmµG is the coefficient of friction of bolt thread, µG = 0.4µK is the coefficient of friction of bolt (head and nut) surface, µK = 0.4d2 is the edge diameter, d2 = 24mmP is the bolt pitch, P = 2mmDkm is the mean bolt diameter which is obtained from (6):
Dkm =dk +DB
2(6)
where
dkis the inside diameter of the contact surface (diameter of bolt hole) dk = 17.6mmDB is the outside diameter of the contact surface (bolt head outside diameter) DB =
27.7mmFrom (5) a tension force in the bolt of 11kN or 54.7MPa (for bolt as a solid ø16 rod) isobtained.
The actual tensioning of the bolt was achieved by means of imposing a Abaqus“bolt load” in a plane at the center of the bolt shank as illustrated on figure 13. Thisbolt load will cause the bolt to obtain internal stresses due to contact pressure betweenthe bolt-head/nut and angle bars.
Figure 13: Abaqus “bolt load” applied on bolt shank center-plane

40
Figure 14: Principal force-displacement curve for joint slip (For linear-elastic material, with noplasticity)
5.6.2 Loading from test setup
In order to simulate loading from the test machine, a uniform pressure was applied tothe axially unsupported end of the type joint.
As previously mentioned load application was accomplished in steps and most crit-ical was the load at which the joint starts to slip. In order to determine this load, asimple approximation was initially used and then refined once results from initial runsof the model was completed. The critical force was determined from expression
Fcr = nFMµ (7)
wheren is the number of friction planes for one of the adjoined members, n = 4FM is the tension force of the bolt obtained from expression (5), FM = 11kNµ is the coefficient of friction of the adjoined surfaces, µ = 0.4
According to expression (7) slip is initiated when the applied force exceeds Fcr =17.6kN corresponding to a uniform pressure of 15.12MPa on the angle bar cross-section.
A load interval somewhat below and above this approximate slip value was thenapplied to the step “Load - region 2” in the initial test runs of the joint model. Loadintervals was however slightly modified by viewing results from some of these initialtest runs. A model which would reflect the real joint slip behavior would have a dis-placement curve as illustrated in figure 14(when neglecting plasticity). In the initialmodel with the previously stated axial load pressure interval, the transition from thefriction region (region 1) to the slip region(region 2) was more sudden (no roundingof curve), indicating that the prescribed load in the step “Load - region 2” was notsufficient to cause slip and slip was therefore initiated in step “Load - region 3” wherethe load increases dramatically between each increment. The axial load interval of theFEM model was shifted in a number of trials until a smooth transition from from “Load- region 1” to “Load - region 2” step was obtained resembling figure 14.
As a result of this the following final load steps were applied for the model:
• “Load - region 1” - Load interval:0−15.8MPa

41
• “Load - region 2” - Load interval:15.8−16.5MPa
• “Load - region 3” - Load interval:16.5−100MPa
5.7 MeshingFor the model was used a combination of 20-node quadratic hex and hex dominatedelements (Abaqus type: C3D20). According to [4] “reduced integration” elementsmay cause convergence problems for contact analysis, and hence full integration wasconsidered (convergence problems was experienced for reduced integration elementsin some of the initial trials). Special attention was paid to the mesh around the bolthole, applying a fine symmetric mesh of hex type. The mesh of bolts and angle barsmay be viewed in figure 15
(a) Bolt mesh
(b) Angle bar mesh (Only one angle bar shown - mesh is identical for the two angle bars)
Figure 15: Angle bar joint mesh

42
5.8 Joint axial stiffness resultsBy combining the history output, e.i. the translation and axial load stresses in direc-tion 3 w.r.t. the Abaqus analysis relative time, the solid line work curves in figure 16were obtained, for the 3 different material models. As previously mentioned the his-tory data consisted of measurements in 2 points of the joint (refer to figure 10). Thetotal difference in axial joint displacement in these points was in the order 1/10 of amillimeter, and the displacement of the joint was therefore based on a mean value ofthe history displacement data. For comparison and evaluation of the FEM-results aidealized curve developed in [12], based on experimental results of several identicaltestspecimens of the type joint, is added by the dashed line on the figure. As it may beseen from the figure there are some differences between the results obtained by FEManalysis and the idealized curve based on test results. Region 1 (refer to figure 14)shows good agreement, and also the value at which the joint starts to slip is within7.5% accuracy of the experimental data, which may be considered to be pretty good,since the factors which govern the slip load of the joint are difficult to determine withhigh accuracy (bolt tensioning, friction etc.). However larger discrepancy occurs as thejoint deformation approaches the elastic area. It is obvious that the total slip of the joint(region 2) is not of same magnitude (idealized curve starts to build elastic deformationafter just 0.85mm of slip). This is justified by N. Ungkurapinan et. al., since little orno attention was paid to place the bolts completely centered in the joint holes of thespecimens, as it has been done in the FEM-model. This will also never be psychicallypossible, since joint holes will be made with some tolerance. This last psychical factoris considered to be most likely to cause the deviation. The most concerning discrepancyis the elastic stiffness of the joint. The idealized curve indicates a relatively large de-formation with low elastic stiffness, whereas FEM indicates small elastic deformationwith a larger stiffness quickly achieving plastic behavior (for the models containingplasticity). Some differences between the FEM-model and the experimental test setupshould be pointed out at this stage:
• The FEM-model considers grade 10.9 bolts whereas the experiment applies boltswith a ultimate strength of some 800MPa. (Hence experimental bolts starts toyield at a earlier stage than the ones applied for the FEM-model, however defor-mation of the bolts is generally considered to be small.)
• The idealized curve is derived from several sets of experimental data and mustalso obscure any “noise” on measurements.
However differences between the two methods, due to different bolt grades, shouldnot appear in the elastic FEM-analysis, and still this analysis indicates same elasticstiffness behavior as the two models containing plastic properties. Analysis with boltsof perfect plastic material and a yield strength of 640MPa (yield strength most likely tocorrespond to the bolts applied in the tests) shows no changes in stiffness, and it maytherefore be concluded that in this case yielding of the angle bar holes by far gives thelargest contribution to the reduction in joint stiffness. Plots of the plastic strains in thebolts confirms this observation, since no plastic strains are observed in the shank of thebolts (which would lead to substantial axial deformation.), plastic strains only occursin bolt head and nut, due to contact pressure with the angle bar surface.
It seems reasonable (as indicated by the FEM-model) that if a perfectly circular boltshank, goes into bearing with a perfectly circular hole, the area which initially pressesagainst the hole, will be of infinite size, an thus produce yield stresses in the hole almost

43
60
80
100
120
140
160
F [M
pa]
Force-displacement curve axially loaded joint w.o. bending
FEM model ‐ ElasticFEM model ‐ Plastic w. hardeningFEM model ‐ Perfectly plasticIdealized curve ‐ N. Ungkurapinan
0
20
40
60
80
100
120
140
160
0,00E+00 5,00E‐01 1,00E+00 1,50E+00 2,00E+00 2,50E+00 3,00E+00
F [M
pa]
Joint deflection [mm]
Force-displacement curve axially loaded joint w.o. bending
FEM model ‐ ElasticFEM model ‐ Plastic w. hardeningFEM model ‐ Perfectly plasticIdealized curve ‐ N. Ungkurapinan
Figure 16: Deformation curve for idealized experimental and FEM-model results (Parts of the“Elastic” and “Plastic w. hardening” work curves are obscured by the work curve forthe “Perfectly plastic”.)
Figure 17: Plastic strains in bolts of perfect plastic material with yield strength 640MPa for jointunder axial load (zero plastic strain colored blue)
instantaneously. Also residual stresses from punching or drilling of bolt holes in thetestspecimens, may produce a difference (This is not captured in the current FEM-model), since the material around the holes may start to yield earlier than anticipatedby the FEM-model.
All these factors may inflict on the experimental data, yielding a lower stiffness ofthe test specimen joint, than what can be obtained by a simple FEM-model as describedhere.
5.9 Result testingSince the joint FEM-model showed some discrepancies with respects to the experimen-tal data (established in figure 16), further testing of the model was performed in orderto validate if other issues, than what has previously been addressed, were inflicting onthe results. Model and result testing was limited to contain: mesh convergence testing,stress discontinuities and bolt tensioning.

44
60
80
100
120
140
160
F [M
pa]
Convergence: Force-displacement curve axially loaded joint w.o. bending
FEM model ‐ ElasticFEM model ‐ Elastic ‐ conv.FEM model ‐ Plastic w. hardeningFEM model ‐ Plastic w. hardening conv.
0
20
40
60
80
100
120
140
160
0 0,5 1 1,5 2 2,5 3
F [M
pa]
Joint deflection [mm]
Convergence: Force-displacement curve axially loaded joint w.o. bending
FEM model ‐ ElasticFEM model ‐ Elastic ‐ conv.FEM model ‐ Plastic w. hardeningFEM model ‐ Plastic w. hardening conv.
Figure 18: Result comparison from type joint convergence testing.
5.9.1 Mesh convergence
The FEM is a mathematical approximation to a psychical problem, by application ofapproximated field variables. In general the solution given by this approximation con-verges towards the actual solution by the number of elements which are applied (severalfactors such as geometric order of elements etc. governs the convergence rate). Whenperforming a FEM analysis it is not desirable to apply a large amount of elements inorder to obtain a completely accurate result, since this would require a long time ofcomputation. The usual aim is have model with a (relative) fast computation and ac-ceptable deviations from the exact solution. The usual convergence rate in the FEMis not linear, thus the solution quickly converges towards the exact solution with just areasonable amount of elements. In order to determine the state of convergence for thetype joint FEM-model, the model was re-meshed by increasing the amount of seedsalong previously seeded edges by 50%.
Since this project was mostly concerned with the deformation of the joint, compar-ison of results, between the original and the re-meshed model, will be limited hereto.In figure 18 the work curve of the re-meshed models is given by dots at outputted in-crements of the analysis and may be compared with the initially accepted results (solidline).
The figure illustrates that there is no visible difference between the results obtainedby the re-meshed model and the original.
At the same time it should be mentioned that the re-meshed model has a CPU timeof 10.5 hours and the original only 1.2 hours (for the elastic material model). Thisclearly illustrates the importance of doing convergence testing, analysis run time canbe drastically reduced by mesh optimization based on result convergence. If a 3%difference in results was obtained, the original model may still be accepted in order toreduce computation time by 90% from the re-meshed model.
The convergence graph also illustrates the critical phases of the joint axial deforma-tion: at transition from friction to slip and at transition from slip to bolts in bearing. Atthese locations the dots from the convergence results are very closely spaced, indicatingthat Abaqus is applying a large number of increments at these locations.

45
5.9.2 Stress discontinuities
In order to determine the adequacy of most FEM-model meshes, it will be relevant toview the discontinuities of the model field output results. The discontinuity is the dif-ference between the lowest and highest nodal value common to two or more elements,and is a good indicator as to where in the model the mesh density is insufficient. In thisproject only discontinuities in Von Mise stress was considered. At several locationsdiscontinuities was however not considered, these were:
• Corners between the two legs of the angle bar
• Locations at which corners of bolt head and nut is pressing against the angle barsurface
• Bolt shank at locations which is pressing against corners of angle bar holes (Justunder head and nut and at the center of the shank).
These locations are ignored since high values of stress are inflicted at these areas. For aperfectly meshed sharp corner, such as the corner between the two legs of the angle bar,stresses would reach infinite levels. Same applies for the contact areas where cornersare pressing against surfaces. If large discontinuity was to be avoided, all corners wouldhave to be smoothed, which is very demanding, even for a simple detail as consideredin this case. Furthermore effects from discontinuity in these areas is considered to havelittle effect on the joint deformation which is required in this project.
Contour plots of the stress discontinuities are given in figure 19 for the type jointmodel with the “plastic w. hardening” material model. For the angle bar member thelargest discontinuities are observed in the area around the bolthole (hence only this areais considered on the figure).
From the contour plots several nodes of interest were selected and their V. Misestress discontinuities were probed and compared with the actual averaged stress. Re-sults may be viewed in table 4. From the table stress discontinuities are observed tobe high compared to the actual V. Mise stress at the probed node. The discontinuityshould be viewed with respects to the required parameter of the joint. This projectis mainly concerned with the deformation of the joint at a certain load. Further dis-continuity tests performed in Appendix E.3, with the convergence model described inthe previous subsection, indicates that the discontinuities are reduced by increasing themesh of the model, however not even the convergence model provides satisfying dis-continuities. Considering that there was no effect on joint deformation by increasingthe mesh by 50% along all edges, and this is seen to reduce the discontinuities of thejoint model, it is assumed that the discontinuities given in table 4, does not have a con-siderable effect on the joint stiffness results. However if stress in the model is requiredthe mesh must be refined and discontinuities rechecked.
5.9.3 Bolt tensioning
Tests of the bolt tensioning was made up of two parts: Initially was modeled a solidrod resembling the bolt shank and the bolt load was applied to the center plane by sameconcept as illustrated on figure 13. Reactions in the axial direction on one side of thebolt was then summed to confirm that they were in equilibrium with a internal force ofthe prescribed bolt tensioning.
Next the entire joint model was considered. A bolt load of 0.11kN (∼ 1% of theentire bolt load) was applied to the bolt and stresses in the angle bar at the location of

46
(a) Discontinuities in angle bar with probed nodes (the neglected areas, primarily corners, are remove for remainingdiscontinuities to be clearly visible).
(b) Discontinuities in bolt with probed nodes
Figure 19: Stress discontinuities in type joint FEM-model for the material model “plastic w.hardening”.

47
Node V. Mise stress[MPa]
V. Mise stress(Discontinuity)
[MPa]
Discontinuitypercentage of total
stress [%]2941 397.9 512.8 129%792 564.0 370.9 66%
2160 310.7 313.7 101%3090 330.7 211.5 64%291 313.8 215.6 69%
(a) V. Mise stress discontinuities in angle bar
Node V. Mise stress[MPa]
V. Mise stress(Discontinuity)
[MPa]
Discontinuitypercentage of total
stress [%]1423 457.9 382.2 79.3
73 556.4 440.2 70.6(b) V. Mise stress discontinuities in bolt
Table 4: Probed V. Mise stress discontinuities in nodes selected from contour plots comparedwith actual stress values.
bolt head and nut was examined. The purpose of this test was to ensure that the contactformulation between head, nut and angle bars were tight, e.i. contact between the partswould be established almost instantly. Both test yielded satisfying results.
5.10 Joint rotational stiffnessFor the purpose of buckling analysis the previously determined axial joint stiffnesswas to some extent, irrelevant and merely a method of confirming that a FEM-modelcould generate joint stiffness results with good correspondence to actual joint behav-ior. From the previous tests and result comparison this is on some level considered tobe confirmed, even though some factors such as residual stresses, imperfections andtolerances are not captured by the FEM-model leaving some deviations to the actualstiffness behavior of the joint. On this note the more buckling relevant rotational stiff-ness behavior of the joint was to be determined. The overall model was the same asthe previous axial stiffness model, leaving only some small modifications in order toconsider rotation of the joint about the two parallel axis of the joint denoted RX andRY (refer to figure 21a). During the study of the rotational stiffness of the joint, it hasbeen assumed that there is no difference in stiffness for clock- and counterclockwiserotation about the same axis, this is however not confirmed.
5.10.1 Modified material parameters
Two major changes was implemented on the material parameters of the model:
• The E-modulus was lowered to 200GPa corresponding to the modulus consid-ered by TIA-G
• Only the material models “Elastic” and “Plastic w. hardening” were considered.

48
5.10.2 Modified boundary conditions
The only modification made to the boundary conditions, was the previously consideredout-of-plane restraint at the loaded end of the type joint. This boundary conditionwas removed since restraint from the test machine was no longer considered (refer tosubsection 5.5.3) and the joint rotational stiffness was now alone to be provided by theconnection to the other angle bar.
5.10.3 Modified loads
The axial loading of the joint was moved to the other end of the angle bar member(closer to the bolt holes) as illustrated on figure 20 and only the angle bar leg containingbolts was loaded. This was all done to prevent unintended rotation, enabled by theremoval of the previously described BC, due to eccentricities in the load application.The axial load of the joint was important since it would increase the rotational stiffnessof the entire joint, due to the bolts contact with the hole surfaces by bearing. Alsothe axial load reflects the actual conditions before buckling of the member, since loadsclose to buckling will be present in the member, before considerable rotation of thejoint due to out-of-plane deformation occurs as indicated on figure 30.
The axial pressure load on the joint edge was kept constant, following the rotationof the joint, ensuring that the axial load does not contribute to any moment, refer tofigure 20. Two different axial loads of 70 and 100MPa were considered , refer tosubsection 5.10.5 hereon.
In order to impose moment to the joint, two different approaches were applied, onein each rotational direction. In order to obtain the stiffness for RX rotation a set ofa surface tractions (surface shear stresses) was applied at the end of the rotating partof the joint. The surface tractions were applied in two directions in order to obtainthe relevant pure bending moment for the RX rotation. The surface traction was onlyapplied to the angle bar leg which was perpendicular to the rotation axis (on both sidesof the surface), refer to figure 21a. This type of load application was considered tobe valid due to the Saint-Vernant principle7, however the mesh density also has animpact on this assumption. The moment was calculated by the size of one of the forcecomponents multiplied with the distance between the components.
For determining RY rotation stiffness a different approach of applying moment hadto be followed, since attempts to use the same principle as for the RX rotation on theperpendicular leg, led to a complicated rotation of the joint (containing twisting). Thisvery complex rotation was not desirable. Instead moment was to be applied by dis-placing the ends of the rotating part as illustrated in figure 21a(Only at top and bottomof angle bar were displaced). Applying displacements to the joint was achieved by aprescribed dof, same as when defining a support, except now the dof had a prescribedvalue which was different from 0 and increasing linearly. However just as a support,the prescribed dof would contain the reaction forces needed to maintain the prescribeddisplacement. The moment which was applied to the joint for a given displacementof the rotating part end, was then calculated as these reaction forces multiplied withthe distance to the closest bolt in the joint. It would be obvious to question why thismethod of apply moment to the joint was not applied for the RX rotation. But by apply-ing moment to the joint by displacement of the joint ends, shear is also applied to thejoint, which has been observed to decrease the amount joint rotational stiffness, most
7Differences in stresses caused by a statically equivalent load system is negligible at a distance corre-sponding to the greatest dimension of the area over which the load system is applied.

49
Figure 20: Modified axial load application on type joint for rotational stiffness (axial load onlyon bolted leg of angle bar)
likely because the joint bolts are then forced to transfer this shear between the two partsof the joint. This is however found acceptable for the RY rotation since the stiffnessof this rotation is much lower than for the RX rotation. The method by which momentis applied for RX rotation may be observed not to produce any shear to be transferredby the joint bolts. This behavior is considered to be more realistic w.r.t. rotation of thejoint due to buckling deformation.
5.10.4 Modified steps and incrementation
Several changes were made to steps and incrementation for the new rotational stiffnessmodel. Since there was now no interest in obtaining joint displacement results as theaxial load was increased the steps “Load - region 1” and “Load - region 2” were deletedto increase computation speed. All axial load was now applied in the step “Load -region 3”. Furthermore a new step named “Load-rotation” was added to imposed therotation loads once the axial load was applied. Also the initial position of the joint boltswas changed from their perfectly centered position to being in bearing, since analysiswas no longer concerned with joint slip. The stiffness of springs between bolt holesand shank was kept at 30N/mm. The springs were not removed as a precaution toavoid convergence problems due to unforeseen displacements, however they have noconsiderable effect.
Finally the number of increments was also attempted to be reduced, by allowingAbaqus to take the steps “Establish bolt tension” and “Load - region 3” in each oneincrement. This was also done in an attempt to reduce computation time.
5.10.5 Joint rotational stiffness results
Based on the new rotational model a work curve for joint rotation RX and RY , forvarying values of moment was obtained. The rotations were obtained by consideringtranslations of the points shown in figure 10, depending on the required rotation. Fromthis history data, the rotation (v) was calculated by (refer to figure 22):
v = tan−1(
X2Y 2
)[rad] (8)
where
Y 2 =X2
X2+X1Y 1+Y 2

50
(a) Joint rotation stiffness model load application: Prescribed displacement for RY (left) and force couples fromsurface traction for RX (right)
(b) Force components from surface tractionforming moment for rotation RX
Figure 21: Rotational stiffness model loadapplication for rotation RX and RY

51
Figure 22: Method of retrieving rotation (v) based on joint nodal displacements (X1 and X2)shown for RX rotation.
and
Y 1+Y 2 = 91mm , corresponding to the distance between the history output nodes.
The joint moment was obtained as described in previous subsection 5.10.3 for eachof the two load types.
From these considerations the work curves illustrated in figure23, was obtained forrotation about both parallel axis of the joint. It should be mentioned that the RY rotationhas been corrected from a initial rotation caused by the very small eccentricity in axialload application, by subtracting this initial rotation from all the obtained results.
The influence of the size of the joint axial load has also been investigated, by in-creasing the initial axial load of 70MPa to 100MPa as illustrated on figure 24. In thiscase the increase in axial load increases the RX rotational stiffness, this may howevernot always be the case, illustrating that for determining joint stiffness it is importantto consider realistic magnitudes of axial loading. The magnitude of the applied axialload is considered to have a minor influence on RY rotational stiffness, thus it is notincluded in figure 24.
For the rotational model no slip occurs (as it was the case for the axial model),since bolts are already in bearing once the member attempts to rotate due to transversedeflection from axial buckling load. In the FEM-model perfect conditions is assumed inrelation to the distance between bolt holes, e.i. spacing of holes in the two members areexactly the same, resulting in both bolts going into bearing at exactly the same time. Inreality this spacing will not be the same, as one of the bolts will go into bearing beforethe other resulting in a loss in rotational stiffness. However if the joint is not highlyover-designed (yielding of the hole initiated before failure of bolts), local yielding ofthe hole for the bolt in bearing will result in both bolts going into bearing at an earlystage of axial loading for normal hole sizes.
It is seen that from the FEM-analysis results, stiffness data is available for a rotationinterval of 0− 0.07rad. By simple calculations of joint rotation for a sine shapeddeflection field it is indicated that a joint rotation of 0.07rad is reached at some L
45 oftransverse deformation, where L is the geometric length of the buckling member. Sucha transverse deformation of the member would normally be assimilated with failure of

52
1,5
2
2,5
3
3,5
4
F [k
Nm
]
Moment-rotation curve axially loaded joint w. bendingRotation RX and RY
FEM‐RX ‐ Elastic 70MPaFEM‐RX ‐ Plastic w. hardening 70MPaFEM‐RY ‐ Elastic 70MPaFEM‐RY ‐ Plastic w. hardening 70MPa
0
0,5
1
1,5
2
2,5
3
3,5
4
0 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09 0,1
F [k
Nm
]
Joint rotation [rad]
Moment-rotation curve axially loaded joint w. bendingRotation RX and RY
FEM‐RX ‐ Elastic 70MPaFEM‐RX ‐ Plastic w. hardening 70MPaFEM‐RY ‐ Elastic 70MPaFEM‐RY ‐ Plastic w. hardening 70MPa
Figure 23: FEM-model deformation curve for rotation about the 2 parallel axis of the type joint(RX and RY )
1,5
2
2,5
3
3,5
4
F [k
Nm
]
Moment-rotation curve axially loaded joint w. bendingRotation RX
FEM‐RX ‐ Elastic 100MPa
FEM RX El ti 70MP
0
0,5
1
1,5
2
2,5
3
3,5
4
0 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09 0,1
F [k
Nm
]
Joint rotation [rad]
Moment-rotation curve axially loaded joint w. bendingRotation RX
FEM‐RX ‐ Elastic 100MPa
FEM‐RX ‐ Elastic 70MPa
FEM‐RX ‐ Plastic w. hardening 100MPa
FEM‐RX ‐ Plastic w. hardening 70MPa
Figure 24: Type joint rotational stiffness dependent on axial load applied to joint. (Not consid-ered for rotation RY )

53
the member, and therefore the stiffness data interval is considered to be sufficient.


55
6 FEM-AnalysisFor the analysis of the sample tower the commercial FEM program: AUTODESKROBOT Structural Analysis Professional 2011(In the following referred to as ROBOT)was applied.
The FEM-analysis was to serve several purposes:
• Analysis of entire sample tower structure for comparison of forces and reactionswith RAMTOWER analysis and hand calculation
• Monitor the effects of non-triangulated hip bracing
• Monitor effects of including joint stiffness, from detailed FEM-analysis to singlesection analysis.
• Compare results from single section analysis with TIA-G provisions, especiallywhen considering the effective slenderness ratio.
Soft-copies of all ROBOT FEM-models applied in this project are given in AppendixF.
6.1 Initial testingIn order to ensure that ROBOT was suitable for the FEM-analysis of the sample tower,a series of initial tests were conducted.
These tests included, but was not limited to:
• Simple cases of linear-buckling analysis of angle bar members.
• Linear-buckling analysis when considering lateral support provided by incomingmembers, including influence of various member release conditions.
• Simple cases of column buckling for angle bar members with eccentric loadapplication (offsets).
• Analysis of columns with non-linearity.
6.1.1 Simple linear-buckling of angle bar members
The purpose of this test was to ensure that critical buckling loads (and modes) givenby the ROBOT linear buckling analysis was in accordance with simple column theory(Euler loads).
A simply supported column was modeled with one end pinned supported and theother with a pinned support on rollers. ROBOT comes with a library of predefined an-gle bar members, these are sub-categorized into two types: major/minor axis profiles(n-n and v-v axis) and parallel axis profiles (x-x and y-y axis) refer to figure 1. Both typesof profiles were tested in two different models. Axial compression load was introducedto the member, and buckling modes were studied.
Initial tests indicated that the program was only capable of considering bucklingabout two axes, either the two parallel axis of the angle bar (x-x and y-y) or the minorand major axis (v-v and n-n), based on whether a parallel axis or major/minor axis pro-file section was defined for the model. This was illustrated by all buckling modes beingof either parallel or major/minor type. This called for a more sophisticated model, to

56
verify the initial result beyond any doubt. To the original model was added a support atmid-span, as illustrated on figure 25, restraining the member from buckling by its en-tire length about one of the parallel axis. This forced buckling modes about the minoraxis to consider only half of the column length for buckling, thus resulting in bucklingabout the non-restrained parallel axis to be most critical. Initial buckling mode for thismodel, when using major/minor profile type was about the parallel axis, thus yieldingthe following results on tests of the ROBOT Linear buckling analysis:
• Only major/minor axis profiles are capable of achieving buckling modes aboutthe major, minor and parallel axis. Parallel axis profiles only contain the twoparallel axis moment of inertias and can thus only consider modes about thesetwo axis. In the following the major/minor axis profile may be referred to as amain axis profile.
This result however posed a problem, since the releases of a angle bar bracing wouldnormally be defined about the parallel axis, as it has been done through the Abaqusanalysis of the previous section. For a normal truss analysis this would not pose anyproblem, since full rotational release would be defined in both directions, but if analysiswas to consider different release stiffness in the two directions the major/minor axisprofile would not be able to accommodate this. To solve the problem a “modifiedbeam” element was applied. The beam element is a main axis profile with a very shortparallel axis profile attached to each end. The connection between the two profile typeswas defined as fully fixed and the short parallel axis profile accommodated correctdefinition of member releases in regards to the actual physical conditions of a bracingjoint, previously obtained from the type joint analysis. The modified beam elementmay be viewed in figure 26
In order to determine the influence of the short parallel axis profile, at both endsof the main axis profile, on the overall buckling load, a simple convergence test wasperformed. The test was performed on a simply supported axially loaded angle bar,by initially considering a parallel axis profile of very short length compared to theoverall length of the member. The length of the parallel axis profile was then increasedand each buckling load was viewed with respects to the buckling load of a plain mainaxis profile, e.i. without any parallel axis profile at the ends. A curve of the bucklingload convergence with parallel axis profile relative length8 may be viewed in figure 27.Convergence test shows that a relative length of the parallel profile of 4.0% yields acompletely accurate result.
Finally the modified beam element buckling load was determined, when consider-ing the two axes at both ends of the member being either released, fixed or one axisfixed and one released at both ends. By doing so the modified beam element bucklingloads given in table 5 was obtained. This table also raise confidence that the axis defi-nitions of the small parallel beam segment is working properly, since for one axis fixedand the other released at both ends of the member a buckling load and mode betweenthe principal loads and modes is obtained.
6.1.2 Linear-buckling load when considering lateral support provided by incom-ing members
The purpose of this test was to verify, that ROBOT includes restraint for buckling pro-vided by other structural members in the model. Furthermore the influence of various
8Relative length refers to the length of the parallel axis profile, compared to the total unsupported lengthof the column.

57
Figure 25: Position and orientation of support at mid-span for provoking parallel axis bucklingfor the beam-column element.
Figure 26: ROBOT model of the modified beam element with local axis definitions
22 6
22,7
22,8
22,9
23
23,1
23,2
1 0%
2,0%
3,0%
4,0%
F cr[k
N]
Rel
. er
ror
[%
]
Convergence test for modified beam element
Rel. error
Critical load
22,4
22,5
22,6
22,7
22,8
22,9
23
23,1
23,2
0,0%
1,0%
2,0%
3,0%
4,0%
0,0% 2,0% 4,0% 6,0% 8,0% 10,0% 12,0% 14,0% 16,0%
F cr[k
N]
Rel
. er
ror
[%
]
Parallel axis profile rel. length [%]
Convergence test for modified beam element
Rel. error
Critical load
Figure 27: Buckling load convergence with parallel axis profile relative length for the modifiedbeam element. Test specimen: L50x50x5 L=2000mm.

58
Axis release definitions at both ends of memberBuckling mode Both axes fixed 1 fixed & 1 released axis Both axes released
Weak 91.45kN - 22.44kNWeak/Parallel - 47.11kN -
Parallel 214.95kN - 53.61kNParallel/Strong - 144.41kN -
Strong 341.33kN - 85.79kN
Table 5: Critical Euler load for modified beam element considering various modes and end-restraints.Test specimen: L50x50x5 L=2000mm. E=200000MPa
Figure 28: ROBOT complex buckling model, “main member” is horizontal with applied nodalload (brown letters at the center of the member are release definition codes)
releases applied to the buckling and supporting members was studied, for later appli-cation in the sample tower model.
A “main member” was modeled as a simply supported beam, with incoming mem-bers providing support for deflection perpendicular to the beam length. Members weremodeled with angle bar sections (of main axis type) and support is provided in such away, that deflection at mid-span is not possible whether it be about the major, minoror parallel axis. Model may be seen to resemble a part of a tower section, whereasthe “main member” would be a legmember in compression, and incoming membersbe various tower bracings. The complex buckling model is illustrated in figure 28.Themore complex buckling analysis yielded the following results:
• Critical buckling modes calculated in ROBOT for the more complex restraintconfiguration showed correct results concerning buckling length and load factor,when considering main axis profiles.
• Varying end-restraint release conditions of restraining members as well as “mainmember” yielded the expected results.

59
6.1.3 Buckling load for members with eccentric load application
It has previously been established that due to the methods by which the angle barbracings of a tower are connected, eccentricities in loading of the members will occur.It was therefore important to establish whether or not ROBOT includes the effectsof eccentricities in buckling analysis. It was clear that a linear-buckling analysis (asapplied in previous tests) would not be sufficient, since this analysis type only considersthe axial loading of the member.
Hence a non-linear analysis was performed for the same test setup as the simplelinear-buckling test described in subsection 6.1.1, only now with eccentricities appliedby means of offsets.
Different approaches to member offset was attempted: ROBOT offset function andmanual offset by adding small perpendicular beam at each end of the column for loadapplication.
For a ROBOT non-linear analysis with releases it is recommended to apply a DSC-element algorithm, which basically generates a small element at the end node of allelements defined by the user. All release definitions on the old element nodes are thenmoved to the DSC-element nodes (refer to [5]). In the case of advanced elastic andnon-linear release definitions, application of the DSC-element is mandatory, so theDSC-element would most definitely have to be applied in order to utilize the rotationalstiffness models previously found in Abaqus. ROBOT can however not include offsetswhen using the DSC-element, and since non-linear releases would have to be definedfor this project a assumption had to be made:
Considering the buckling curves in figure 2 and the provisions of the TIA-G stan-dard described in section 2, it is reasonable to assume that for eccentricities which maybe considered to be within “normal framing” eccentricity, e.i. angle bars are connectedleg to leg, near the center line of the member, the reduction of the buckling load is neg-ligible for slender members such as bracings with
(Lr ≥ 120
). Hence for the remaining
part of this project eccentricities of members will not be considered.
6.1.4 Non-linear analysis
The previous buckling tests with eccentric load application, resulted in a increasingdoubt whether ROBOT was actually capable of performing even a simple non-linearanalysis. Therefore two basic tests that would require a non-linear analysis were per-formed:
• Simply supported beam-column with transverse loading at the mid-span.
• Simply supported beam-column with non-linear spring release at the ends.
Test models may be viewed in figure 29.The non-linear analysis is different from the linear buckling analysis previously
applied. The analysis does not give a result output of critical loadvalues for the mod-els. The non-linear analysis applies all loads on the models in increments, graduallyincreasing until full load is applied (for each increment the stiffness matrix is updatedand equilibrium iterations are performed). Results from the non-linear analysis consistsof transverse deformation of the member as the load increases, hence determining thecritical load of the member, now relies on the value of transverse deformation whichmay be considered to be acceptable. In some cases the axial load of the member at in-finite transverse deformation corresponds to the Euler load, however this is not always

60
(a) Non-linear model with transverse loading (b) Non-linear model with non-linear rotational spring re-leases
Figure 29: ROBOT Non-linear analysis test models
the case (as will be illustrated later). For this non-linear analysis the Newton-Raphsonmethod was applied, which provides no information about the deformation and bearingcapacity state of the compressed member after buckling (largest bearing capacity) hasoccurred. Columns are normally considered to be postbuckling neutral9, e.i. the com-pression capacity of the column, does not increase after buckling of the member hasoccurred. For both models deflection at midspan in the expected direction of bucklingfailure (weak axis failure expected, refer to figure 29) was monitored for each incre-ment of the non-linear analysis, and plotted against the total applied axial load in thesame increment.
For the model with transverse load in figure 29a, two different transverse loadvalueswere considered.
For the beam-column with non-linear spring releases a joint rotational stiffnessmodel, defined by a curve with the same properties as the curve “FEM-RX - Plasticw. hardening 70MPa” shown on figure 23 in section 5, was applied. The non-linearrelease was defined at both ends of the specimen for rotation about the weak axis ofthe profile (refer to figure 29b). In both models a axial load was applied and a non-linear analysis was performed. To cross check load values a linear buckling analysiswas exercised for the same models. The transverse deformation of both models forincreasing axial load may be viewed in figure 30. I should be mentioned that for thecurve in figure 30b, deformations from the analysis is very small, and therefore somedecimals are lost in the postprocessing facilities of ROBOT, leaving the result curve
9According to Lars Damkilde in [6].

61
with a stepwise expression. If all decimals could be extracted from ROBOT the curvewould be more smooth as it is the case in figure 30a.
In order to have some kind of reference outside ROBOT a secondary check of thelinear buckling value for the non-linear spring released model was performed. Timo-shenko deals with simply supported, elastic end-restrained beam-columns in [17]. Thebuckling parameter kl for a beam-column of this type, which appears in the generalexpression of the critical buckling load (Euler load) may be found from the expression:
tan( kl
2
)kl2
=−2 ·E · Iα · l
(9)
where α is the elastic coefficient of the end-restraints and is found as:
α =Mθ
where the moment M = 376.000Nmm and corresponding rotation θ = 0.00284radis the first data point used to define the non-linear release curve in ROBOT. Fromexpression 9 is found a value of kl
2 = 2.2616, which is applied to the expression 10by which the critical buckling load for the beam-column with elastic end-restraints isobtained.
Fcr =kl2 ·E · I
l2 (10)
(2 ·2.2616)2 ·200.000MPa ·531100mm4
(3000mm)2 = 241.47kN
This load value is seen to correspond to the load value obtained by the ROBOTlinear-buckling analysis as illustrated on figure 30b and stated in table 7.
It is seen that the non-linear analysis arrives at a lower buckling value than whatis anticipated by the linear-buckling analysis. This is in good agreement with the dif-ferences between the two types of analysis. The linear-buckling analysis assumes theend-restraint stiffness curve to have the same slope as the initial part of the curve (asit was assumed in the cross-check with above expressions by Timoshenko - thereforethe two methods arrives at the same result). The non-linear analysis updates the stiff-ness matrix for each load increment updating the stiffness of the end-restraints with thedata provided by the curve. Since the slope of the stiffness curve decreases as rotationis increased the non-linear analysis will gradually experience a loss in end-restraintstiffness, and hence arrive at a lower critical load as the overall load is increased.
As previously mentioned the non-linear analysis does not provide a critical buck-ling load as was the case for the linear buckling analysis. The critical load should bebased on acceptable transverse deflections of the member i compression. In the caseof the transversely loaded beam-column, loadvalues at a out-of-plane displacement ofL/1000 (2mm) and L/100 (20mm) are given in table 6 for the two different valuesof transverse loading. These load values should be compared with the Euler load forlinear buckling of Fcr = 22.44kN, indicated by percentage enclosed by () in the table.
From tests performed on the ROBOT non-linear analysis facilities, it is concludedthat ROBOT is capable of providing reasonable results from beam-column memberswith transverse loading and non-linear release definitions. Hence ROBOT fulfills therequirements of the project.

62
10
15
20
25
F [k
N]
Out-of-plane deformation (at midspan) for transverse loaded beam-column
ROBOT 0.5kN
0
5
10
15
20
25
0 20 40 60 80 100 120 140
F [k
N]
Deformation [mm]
Out-of-plane deformation (at midspan) for transverse loaded beam-column
ROBOT 0.5kN
ROBOT 1kN
Linear buckling
(a) Force-displacement curve (out-of-plane displacement at mid-span) fromnon-linear analysis of transverse loaded beam-column, compared with lin-ear buckling.Test specimen: L50x50x5 L=2000mm E=200000MPa
6080
100120140160180200220240
F [k
N]
Out-of-plane deformation (at midspan) for beam-column with non-linear end-restraints
ROBOT Non linear end restraints
020406080
100120140160180200220240
0 0,5 1 1,5 2 2,5 3
F [k
N]
Deformation [mm]
Out-of-plane deformation (at midspan) for beam-column with non-linear end-restraints
ROBOT ‐ Non‐linear end‐restraints
ROBOT ‐ Ideal full release
ROBOT ‐ Non‐linear end‐restraints (Euler)
(b) Force-displacement curve (out-of-plane displacement at mid-span) fromnon-linear analysis of beam-column with non-linear end-restraints, com-pared with linear buckling of non-linear restrained and unrestrained beam-column. Test specimen: L100x100x7 L=3000mm E=200000MPa
Figure 30: Results of ROBOT non-linear analysis of test models
Out-of-plane displacement ROBOT - 0.5kN ROBOT - 1.0kN2mm 17.5kN (78.0%) 14.25kN (63.5%)20mm 21.8kN (97.1%) 21.3kN (94.9%)
Table 6: Loadvalues for L/1000 and L/100 of out-of-plane displacement for transversely loadedbeam-column models analyzed i ROBOT. Percentage enclosed by () is the non-linearload value with respects to the Euler load from linear buckling (Fcr = 22.44kN).

63
Model Critical loadNon-linear release RX (NL-analysis) 231.25kN
Non-linear release RX (Linear-buckling) 241.41kNFull release (Linear-buckling) 116.46kN
Table 7: Critical load from linear-buckling and non-linear analysis of beam-column with non-linear end-restraint definition, compared with linear buckling for unrestrained beam-column.
6.2 Model descriptionThree tower models were considered in this project:
• Complete sample tower model with pin connected bracings - Referred to asModel A
• A model of bottom section no. 13 of the sample tower with pin connected brac-ings - Referred to as Model B
• A model of bottom section no. 13 of the sample tower with semi-rigid connectedbracings, by application of type joint rotational stiffness results - Referred to asModel C
Model A was used to compare forces and reactions obtained from RAMTOWER anal-ysis and hand calculation of the sample tower described in section 3 and may be viewedin figure 32.
The purpose of the models B and C was to study the influence of semi-rigid con-nected bracings in the tower structure. Previous studies by Kang et al. [18] indicatelarge effects of rigid connections on tower horizontal load capacity. However the mod-els presented in these studies only consider fully pinned, in-plane pinned and fullyrigid connections, neither of them reflecting the actual behavior of the bracing joints.The models B and C were limited to only consider section 13 of the sample tower,instead additional features to increase the accuracy of the models were implemented(compared to Model A).
Geometry of the sample tower was initially gathered as a 3D model in AUTODESKAutoCAD 2011. Geometry was then imported to ROBOT for analysis. Members weredefined as type “beam”, and angle bar sections were assigned as per drawing in Ap-pendix B. A lot of attention was paid to ensure that the orientation of the angle barprinciple axis was correctly defined, i order to obtain correct buckling modes duringanalysis (for Models B and C).For loading of the tower methods similar to the ones in the hand calculation was ap-plied, thus wind load on tower sections was applied as nodal loads equally distributedto all four legmembers at top and bottom of each section. The same method appliedfor vertical loading from tower self-weight and appurtenances. Only the 0 degree windload case was considered for all three models (refer to figure 6 and 32). Since ModelsB and C only contained one section the loading from the above tower structure wasapplied in the following manner: A copy of the Model A was made, and the bottomsection no. 13 removed. Supports were then moved to the new bottom part of the tower,were it had previously been connected to the top of section no. 13. A linear static anal-ysis was then performed and the reactions in the supports noted. These reactions werethen added to the top of the legmembers in the Models B and C. All this was done in

64
Figure 31: Layout of tower FEM-model releases and angle bar orientations - releases (pinned orsemi-rigid) indicated by an empty circle - LI and LO indicating leg of angle bar beingin to or out of the plane respectively.
order to ensure a realistic force distribution.Tower bracing members were assigned with some releases (different for each model),whereas legmembers was considered to be continuous. For Model A all bracings weremodeled with pinned releases, e.i. free rotation about both principal axes (but not freeto twist) as was also Model B. For Model C bracings were modeled with a semi-rigidrelease about both principal axes (by use of a non-linear spring). The semi rigid releaseswere defined with joint rotational stiffness retrieved from the Abaqus FEM-analysis asdescribed in section 5 and was only considered at the end of each primary bracing, e.i.secondary bracings and horizontals were defined with pinned releases about both prin-cipal axes in the all models. The application of the short parallel axis profile developedthrough the initial testing of ROBOT, ensured that releases could be properly definedwith respects to their axis of rotation.
The layout of releases and orientation of bracings was common for all 3 modelsand is illustrated in figure 31.
The bottom section legmembers are supported by fixed supports to simulate theangle bar being cast-in to the concrete foundation as proposed by Kang et al. [18].
For the Model A a simple “linear static analysis” was performed, whereas for modelB and C a “non-linear static analysis” had to be applied, since model C was definedwith non-linear releases.
To the Models B and C some additional features were included, as previously men-tioned.
At main bracing cross-over point a ROBOT compatible nodes property was in-cluded. This was done to connect nodes from both diagonal members at the crossoverpoint, so that translation of these nodes are the same, but no rotation(moment) can betransferred between them. This is a realistic property compared with actual conditions,where cross-bracings are usually connected with a single bolt at the cross-over point.Furthermore the two models where modeled by applying the “modified beam element”

65
Figure 32: Rendering of Model A (left) and common illustration of load application and releasedefinitions for section no. 13 for Models A, B and C (right)
as described in subsection 6.1.1. The modified beam element was however not appliedto leg, horizontal and secondary members, since these members was considered fullypin released at all times as previously mentioned, i.e. free rotation about both principleaxes. Main and secondary bracing members were divided into 2 separate members ineach span (excluding the small parallel axis profile at each end.), to improve ROBOT’sapproximation of the sine shaped deflection field by use of 3. order polynomials. Hor-izontal members were however divided into 3 members in each span.The TIA-G effective slenderness ratio expressions given in table 1, is not consideredto include imperfections of any kind. Since the scope would be to compare effectiveslenderness ratios, based on critical buckling loads obtained from non-linear analysisof the models B and C, with the expressions given in the TIA-G standard, imperfec-tions needed not to be included in the analysis. The models B and C may be viewed infigure 32.
6.3 Test runs of FEM-ModelsIn the following is described observations and modifications made to the initial FEM-models in connection to a series of test runs. The objective of these test runs was just

66
as the initial tests to ensure reliable results.
6.3.1 Effects of secondary bracings
From initial runs of the overall model of the sample tower (Model A) some substantialdiscrepancies were observed between the diagonal compression forces in the FEM-model and the forces determined by RAMTOWER and the hand calculation. In mostof the sections, diagonal compression forces were obtained with acceptable accuracy,but for the sections 12, 11 and 10 the forces were considerably higher. The overallreactions from the tower were however close to identical, which indicated no errors inthe loading of the tower. Further study of forces in the secondary bracing of the bottom3 sections showed that these were also loaded with substantial axial forces. In light ofthis large discrepancy the Model A was subcategoriesed into two models:
• FEM-model (nodal)*: Secondary bracings are considered active in the analysis(Original Model A)
• FEM-model (nodal)**: Secondary bracings are not considered active in the anal-ysis (eliminated from stiffness matrix), same assumption as in RAMTOWER andhand calculation.
The differences in the results from these two models is treated further in section 7
6.3.2 Effects of non-fully triangulated hip bracing
As previously mentioned the sample tower design is provided with internal hip brac-ing which is not fully triangulated as per provisions in TIA-G. Consequences of thisfailure to comply was experienced during the initial runs of the FEM-models. Criticalbuckling modes for 0 degree wind load case, were not of main axis type (as expected)but of parallel axis type as illustrated on figure 33. However the buckling load valueswere higher than the value corresponding to parallel buckling of the specific members.The cause of this lies within the restraint provided by the hip bracing. Due to thenon-triangulated nature of the hip bracing, the main bracing perpendicular to the winddirection participates in the buckling mode of the member parallel to the wind. Thisresults in the hip bracing acting as a spring with properties dependent on the bendingstiffness of the perpendicular bracing to which it is connected, providing the memberparallel to the wind with some restraint for parallel buckling.
It would however be interesting to utilize this extra capacity for tower design cal-culations. Fully triangulating the hip bracing would result in a increase in steel con-sumption and increase the tower assembly complexity. If a reasonable increase incapacity (compared to not providing any hip bracing) could be achieved by means ofnon-triangulated hip bracing, as provided for the sample tower, this would be very costefficient.
Considering the buckling load of the diagonal member in tower section 13, furtherstudies were made based on three hip bracing configurations:
• No hip bracing provided
• Non-triangulated hip bracing provided
• Fully triangulated hip bracing provided

67
Hip bracing Buckling mode axis Buckling capacity Hip bracing net-weightNone Parallel 34.5 kN 0 kg
Non-triangulated Parallel 52.7 kN 50 kgTriangulated Minor 62.1 kN 350 kg
Table 8: Buckling capacity and weight of hip bracing for 0 degree wind load case for the 3 sectionmodels
For transparency only horizontal loading from wind on the section itself was appliedduring this study (loading from the tower body above the section is not included).
The buckling mode axis and critical buckling load from linear-buckling analysis forall three models is given in table 8 along with net-weight of steel used for hip bracings.
In order to achieve full triangulation of the internal hip bracing several memberswere added to the hip bracing as well as plan-bracing at diagonal cross-over point asillustrated on figure 34. The slenderness ratio L
r of each new member is enclosed by() on the figure and should be no larger than 250 as specified by [4.4.2] in TIA-G forsecondary members. From table 8 it is seen that there is actually a reasonable gain inbuckling capacity by providing non-triangulated hip bracing, compared to the weightof the steel material consumed.
Finally in order to complete this study the effects of providing non-triangulatedhip bracing for wind load cases other than 0 degree must be considered, hence sectionwas exposed to a 45 degree wind load case (load case usually considered for design oftowers with square cross sections). In order for this study to be as realistic as possible,loads from the 0 degree case was converted to 45 degree. In TIA-G [table 2-6] isgiven a “wind direction factor”, a factor by which the 0 degree wind load should bemultiplied in order to obtain the 45 degree wind load (since wind resistance of thetower body is larger for 45 than 0 degree wind). The factor is dependent on the solidity(ε) of the tower section, e.i. the ratio between the wind face area of structural elementsand wind face area of the section gross section(refer to hand calculation in AppendixAR.D), however the factor should be no larger than 1.2, a factor which will be assumedin the following study. Factored 0 deg loads are projected in the 2 global horizontaldirections of the model (to form a 45 degree load), and added to section nodes by thesame principle as for the 0 degree case.
The buckling mode and load for the 45 degree load case was of parallel type. Noadditional capacity was achieved by providing the non-triangulated hip bracings in the45 degree case compared to section with no hip-bracings at all. This “loss” in capacityis caused by the member perpendicular to the wind direction for the 0 degree case, nowin fact being in compression, hence not providing any restraint to the considered mem-ber. As illustrated in table 9 the difference between the diagonal member compressionforce for the 0 and 45 degree load case is limited. Since the buckling capacity for the45 is less than the 0 degree wind load case, the total gain in capacity by providing non-triangulated hip bracing may be considered to be the difference between the sectionforces for the 2 cases, thus in the order of 15% in this study. This increase in capacityshould be viewed with respects to the design effort which must be invested to includebending in the perpendicular bracing for the section with non-triangulated hip bracingin the 0 degree wind load case (and perhaps also other cases).
The above study exemplifies the importance of triangulated primary as well as sec-ondary bracing. Buckling capacity of non triangulated lattice is almost impossible to

68
Wind direction Diagonal force Buckling capacity0 deg. case 4.64 52.7 kN
45 deg. case 3.98 34.5 kN
Table 9: Results of linear-buckling analysis of non-triangulated section for 0 and 45 deg windload case
determine by non-computational methods, since it relies on stiffness considerations.Furthermore it imposes bending of members which is not desirable in tower design andrequires a increased attention and effort during design. Same conclusions are seen inprevious publications such as [11] by N. Prasad Rao et. al. documenting prematurefailure in several transmission line towers due to non-triangulated hip-bracings, by useof FEM-analysis and full-scale tower tests.
Instead of fitting towers with secondary bracings, it may sometimes be more bene-ficial to just increase the size of the primary member cross-section. In the above studya total steel net-weight of 350kg was consumed in order to provide the tower with fullytriangulated hip-bracings. Providing the tower with this hip-bracing a diagonal com-pression capacity of 67.2kN was obtained as per table 8. If the same amount steel wasutilized to increase the diagonal cross-section instead of providing fully triangulatedhip-bracing a diagonal of Lx90x90x9 could be applied. ROBOT analysis of such atower shows a compression capacity of 183.9kN for the diagonal member. This exam-ple underlines the responsibility of the designer to investigate different options to findthe most suitable solution for each tower design. Usually smaller towers will not bene-fit from large amounts of secondary bracings, better would be to just increase primarymember cross-section.
For the remaining part of this project, tower hip bracings were not considered.
The focus on bending in tower members from non-triangulated bracings, may raisethe question whether considering the rigidity of bracing member end-restraints (suchas it is intended in this project) also will impose bending. However previous studiesby e.g. Roy et al. [16] indicates that local secondary bending stresses from connectionrigidity and member continuity is limited, conditioned that the tower structure has rea-sonable geometric proportions. It is however also that secondary stresses will increaseas tower height and width increases. This is however not considered to be the case forthe sample tower and therefore secondary bending stresses from connection rigidityneed not be considered in this project.

69
(a) Top view of tower section no. 13, with indication of detail and direction ofload (red arrow)
Hip bracing
Restraining member
Failing diagonal member
(b) Detail of main diagonal member buckling failure with bracing perpendic-ular to wind restraining the member through non-triangulated hip-bracing.
Figure 33: Buckling failure of section with non-triangulated hip bracing. (brown silhouette isthe deformation of the failure mode)

70
Figure 34: Members added in order to triangulate the non-triangulated hip bracing (dashedlines). Slenderness of each member is enclosed by ()
6.4 ResultsIn the following the results of the three ROBOT FEM-models are presented.
For the Model A containing the entire sample tower structure, the most relevantresults were the compression forces in tower legmembers and diagonal bracings. Fur-thermore overall reactions from tower was also extracted from the analysis. Theseresults along with the results of the hand calculation and RAMTOWER analysis maybe viewed in Appendix C. A comparison between the results obtained by the differentmethods, and further discussion of the results may be found in section 7.
For the analysis of the Models B and C, the results consisted of buckling loads fordiagonal failure in the section. During the non-linear analysis of the Models B and Cit turned out that the forces from the above tower structure combined with the loadingon the section itself was not sufficient to cause buckling failure of the section. Hencethe loads on the sections were equally factored until a failure occurred in the analysis(ROBOT could not longer form equilibrium in all increments of the non-linear analy-sis). As expected both sections failed by parallel buckling of the diagonal members inthe bottom span (below cross-over point). The axial compression forces in the diago-nals at failure may be viewed in table 10, for the Models B and C.

71
Model Mode Buckling load Max. displacementModel B Parallel 36.44kN 11mmModel C Parallel 44.86kN 7mm
Table 10: Results from non-linear ROBOT analysis of Models B and C. Maximum displacementis measured at midspan of the failing member in the parallel direction (failure mode).
All results are treated further in section7.


73
7 Comparison
7.1 RAMTOWER, hand calculation and FEM-resultsIn this section the distribution of forces in the sample tower calculated by application ofRAMTOWER, hand calculations and the FEM-program ROBOT is compared. Severaldifferent models were considered within each method:
• RAMTOWER regular: Standard RAMTOWER analysis - Wind profile and load-ing calculated by RAMTOWER and automatically applied at relevant levels.
• RAMTOWER nodal: RAMTOWER wind profile is disabled and load found inthe hand calculation is applied as point loads between each section
• Hand calculation: Hand calculation attached in Appendix AR.D (loads foundwithin the hand calculation is applied in all four legmembers between each sec-tion)
• FEM-model (nodal)*: ROBOT “Model A” as described in subsection 6.3.1
• FEM-model (nodal)**: The same model as FEM-model(nodal)* only all sec-ondary bracings were inactive during the analysis, e.i. they were eliminatedfrom the stiffness matrix.
Only forces from a 0 degree wind load case are compared in this project.On the figures 35 and 36 the compression forces in tower diagonal and leg members
respectively are compared, by considering the relative error from the regular RAM-TOWER analysis. Due to this method of comparison the red “bar” indicating theRAMTOWER regular relative error is of course zero.
The figures consider the deviations to be either on the safe or unsafe side, e.i. ifforces found by the alternative methods are lower or higher than the forces found fromthe regular RAMTOWER analysis.
As it may be seen from figures there are some rather large deviations betweenRAMTOWER (regular) and all other methods in tower section 1. This deviation maybe explained by the fact that RAMTOWER calculates sections forces by the principlepreviously illustrated in figure 7. The deviation in diagonal compression force maybe explained by considering the rather large horizontal point load from appurtenanceslocated in the middle of the section (level 38.75m). The regular RAMTOWER analysisconsiders this entire load to be taken by the bracings in section 1, since it assumes thatall horizontal loads above the middle of each section (including the middle) must betaken by the bracings of that section, whereas a nodal approach assumes that the sectionbracing is only to carry half of the load (distributing one half of the load to the top andthe other half to the bottom of the section in question). For the legmember compressionforces RAMTOWER regular is seen to arrive at a force which is lower than what isexpected by the other methods. This is related to the same basic assumption previouslydescribed. For the RAMTOWER regular analysis the rather large point load at themiddle of the section is not considered to contribute with any moment (at the sectionwhere the regular analysis distributes forces by equilibrium considerations) and henceit does also not yield any legmember compression. For the alternative methods momentis present, since half of the horizontal point load is moved to the top of the tower.
The same type of deviation occurs in sections 3 and 4, which also contains pointloads from appurtenances.

74
-50 -40 -30 -20 -10 0 10 20 30
Sec 1
Sec 2
Sec 3
Sec 4
Sec 5
Sec 6
Sec 7
Sec 8
Sec 9
Sec 10
Sec 11
Sec 12
Sec 13
Relative error from regular RAMTOWER analysis [%]
Comparison of RAMTOWER® regular analysis with variousalternative methods:
Diagonal compression force
FEM-model (nodal)**
FEM-model (nodal)*
RAMTOWER (nodal)
RAMTOWER (regular)
Hand calc.
Error on thesafe side
Error on theunsafe side
Figure 35: Relative deviation on diagonal member compression force found by alternative meth-ods compared to a RAMTOWER regular analysis. (Dotted red line indicates a 10%relative error on the unsafe side, which is normally considered to be the maximumerror between RAMTOWER and FEM)

75
-40 -20 0 20 40 60 80
Sec 1
Sec 2
Sec 3
Sec 4
Sec 5
Sec 6
Sec 7
Sec 8
Sec 9
Sec 10
Sec 11
Sec 12
Sec 13
Relative error from regular RAMTOWER analysis [%]
Comparison of RAMTOWER® regular analysis with variousalternative methods:
Legmember compression force
FEM-model (nodal)**
FEM-model (nodal)*
RAMTOWER (nodal)
RAMTOWER (regular)
Hand calc.
Error on thesafe side
Error on theunsafe side
Figure 36: Relative deviation on legmember compression force found by alternative methodscompared to a RAMTOWER regular analysis. (Dotted red line indicates a 10% rela-tive error on the unsafe side, which is normally considered to be the maximum errorbetween RAMTOWER and FEM)

76
The assumptions made by the regular RAMTOWER analysis on distribution ofpoint loads, means that if loads are placed below the top half of a section it is notincluded in the loading of that section diagonal although it is contributing some whatto the loading of that particular member. Same applies for legmember forces.
The overall limitations on local distribution of point loads in RAMTOWER, areconsidered to be acceptable based on several arguments:
• In the top of a telecommunications tower, were point loads from appurtenancestypically are located, profiles are poorly utilized to limit the amount of differentprofiles in a tower and due to deflection requirements.
• For equipment loading on lower sections of a tower the relative deviation be-tween the methods are small, due to the large forces from the above tower struc-ture.
• The psychical distribution of loads on the tower section relies on the local designof appurtenance struts, hence the RAMTOWER regular analysis may in somecases be more accurate.
That the deviations are cause by differences in loadapplication assumptions, is alsoconfirmed by viewing the hand calculation and RAMTOWER nodal analysis. For thesetwo methods the relative error is of same magnitude, e.i. they are arriving at the sameresults.
At the lower sections there are some deviations between the regular RAMTOWERanalysis and the FEM results. This is caused by the presence of secondary bracings inthe FEM stiffness matrix as previously described in subsection 6.3.1. By excluding thesecondary bracings from the FEM-analysis as it is done in “FEM-model (nodal)**”,results with acceptable deviations to RAMTOWER is obtained.
From the reactions obtained by the different methods and given in Appendix C, itmay also be seen that the wind profile considered by the RAMTOWER regular analysisand the alternative methods are equivalent, since moment and shear is obtained with asmall relative deviation.
On a overall scale the regular RAMTOWER analysis seems to be sufficiently ac-curate, compared to the ease at which towers may be defined and analyzed, comparedwith e.g. the FEM-model.
7.2 Buckling of members with joint stiffness results from FEM-analysis.
By inserting the critical load from the ROBOT non-linear analysis into Euler’s formulagiven in expression 1 in section 1, the effective buckling length of the member is ob-tained and hence also the effective slenderness ratio, which may directly be comparedwith the ratios provided by the TIA-G standard. Examples on the procedure and cross-sectional properties applied in the calculation of the effective slenderness ratios basedon results from the ROBOT analysis and TIA-G standard may be viewed in AppendixD. From the critical buckling loads of the two sample tower section models (Models Band C), described in subsection 6.4, the effective slenderness ratios given in table 11 isobtained. It should be mentioned that due to the different lengths of the spans (aboveand below cross-over point) in the sample tower diagonal member, special correctionshad to be made to the basic length of the buckling member before the expressions fromTIA-G could be applied. This was done in order for the effective slenderness ratio to

77
be comparative with the results from FEM. It is strongly advised to view this procedurein Appendix D before continuing to view the results hereof.
As it may be seen from table 11, the results from the non-linear analysis of the towersection with the joint rotational stiffness model, almost matches the effective slender-ness ratio stated by the TIA-G standard. However one comparison was not enough todraw any final conclusions on the adequacy of the TIA-G effective slenderness expres-sions, since a lot of buckling cases, still needed to be investigated. As a consequenceof this two basic models where made as simple beam-columns with applied axial loadin order to expand the comparison:
• L60x60x6 of length 2000mm (In the following referred to as Model A-sec)
• L100x100x7 of varying length (In the following referred to as Model B-sec)
Model A-sec was included in this comparison in order to study the behavior of thediagonal member considered for the sample tower analysis in weak axis buckling (sincethe diagonal only experienced parallel buckling in the section model).
Model B-sec was included since this member was of approximately same size as themember from which the joint stiffness models was initially obtained through AbaqusFEM-analysis (L100x100x6 is not available in the ROBOT section library) and there-fore stiffness values may be more relevant for buckling of a member of this size.
For both models the buckling members were either considered to have the rotationalstiffness models (RX and RY ) defined at both ends (SS) or just at one end with the otherpinned (SP). The layout of the Models A-sec and B-sec may be viewed in figure 37.
Figure 37: ROBOT Non-linear analysis Models A-sec and B-sec with (SS)-condition (top) and(SP)-condition (bottom)
The critical buckling loads for weak and parallel axis buckling from ROBOT non-linear analysis of the Models A-sec and B-sec, may be viewed in tables 12 and 13respectively. Parallel buckling of the angle bar members was obtained, just as in theinitial testing described in subsection 6.1.1, by restraining the member in the directionof one of the parallel axis at midspan(refer to figure 25). The restraint was placedin such a way that transverse deflection from buckling lead to rotation about the axiswhich had been assigned with the lowest rotational stiffness (RY ), since this would bemost likely to occur in a tower design (as it was the case for the sample tower sectionmodels). The critical loads retrieved from the Models A-sec and B-sec underwentthe same procedure as the results from the sample tower section analysis in order toobtain the corresponding effective slenderness ratios given i table 14. Examples onthe procedure and the cross-sectional parameters considered for the two models is alsodocumented in Appendix D.

78
End-restraints(KL
r
) (KLr
)- TIA-G (curve 5) Deviation
RX and RY 174.4 173.6 0.4%Pinned 193.5 - -
Table 11: Effective slenderness ratios based on results of non-linear analysis in ROBOT com-pared with TIA-G basic effective length case. Sample tower section no. 13
Mode (SS) - restrained (SP) - restrainedWeak axis 110.7kN 74.4kN
Parallel axis 154.1kN 129.5kN
Table 12: Critical buckling loads from non-linear analysis in ROBOT. Test specimen: Model A-sec L60x60x6 L=2000mm. Letters enclosed by () indicates the restraints at the endsof the buckling member either being: (SS) = Stiffness model - Stiffness model or (SP)= Stiffness model - Pinned.
Mode (SS) - restrained (SP) - restrainedWeak axis L = 2000 385.0kN 315.0kN
Parallel axis L = 2000 665.0kN 647.5kNWeak axis L = 3000 186.3kN 148.1kN
Parallel axis L = 3000 309.0kN 286.8kNWeak axis L = 4000 114.4kN 87.5kN
Parallel axis L = 4000 178.9kN 165.0kNWeak axis L = 5000 77.3kN 56.25kN
Parallel axis L = 5000 117.7kN 105.0kN
Table 13: Critical buckling loads from non-linear analysis in ROBOT. Test specimen: ModelB-sec L100x100x7. Letters enclosed by () indicates the restraints at the ends of thebuckling member either being: (SS) = Stiffness model - Stiffness model or (SP) =Stiffness model - Pinned.

79
Mode Slenderness ratio(L
r
)ROBOT
(KLr
)TIA-G
(KLr
)Deviation
Sample tower section no. 13 diagonal member: L60x60x6Parallel axis (SC) 190.25 174.4 173.6 (curve 5) -0.5%
Model A-sec: L60x60x6 L = 2000Weak axis (SS) 171.1 111 151.4 (curve 6) 36.4%
Parallel axis (SS) 110.3 94.1 110.3 (curve 1) 17%Weak axis (SP) 171.98 135.4 159 (curve 5) 17%
Parallel axis (SP) 110.3 102.6 110.3 (curve 1) 8%Model B-sec:L100x100x7 L = 2000
Weak axis (SS) 101.4 83.7 101.4 (curve 1) 21%Parallel axis (SS) 65.4 63.7 65.4 (curve 1) 3%Weak axis (SP) 101.4 92.5 101.4 (curve 1) 10%
Parallel axis (SP) 65.4 64.6 65.4 (curve 1) 1%
Model B-sec: L100x100x7 L = 3000Weak axis (SS) 152 120.32 139.8 (curve 6) 16.2%
Parallel axis (SS) 97.9 93.4 97.9 (curve 1) 4.8%Weak axis (SP) 152 134.9 144.5 (curve 5) 7.1%
Parallel axis (SP) 97.9 97.1 97.9 (curve 1) 0.8%Model B-sec: L100x100x7 L = 4000
Weak axis (SS) 202.9 153.5 171.0 (curve 6) 11%Parallel axis (SS) 130.7 122.9 126.6 (curve 6) 3%Weak axis (SP) 202.9 175.5 183.2 (curve 5) 4%
Parallel axis (SP) 130.7 128.0 128.2 (curve 5) 0.1%Model B-sec: L100x100x7 L = 5000
Weak axis (SS) 253.6 - - -Parallel axis (SS) 163.4 151.6 146.7 (curve 6) -3%Weak axis (SP) 253.6 - - -
Parallel axis (SP) 163.4 160.4 153.1 (curve 5) -5%
Table 14: Effective slenderness ratios(KL
r)
calculated on the basis of critical buckling loadsfrom non-linear analysis in ROBOT and TIA-G standard. Letters enclosed by () indi-cates the restraints at the ends of the buckling member either being: (SC) = Stiffnessmodel - Continuous, (SS) = Stiffness model - Stiffness model or (SP) = Stiffness model- Pinned.

80
As it may be seen from the table 14 there are some rather large deviations in someof the effective slenderness ratios obtained by expressions in the standard and the NL-analysis. A clear difference should be present in the effective slenderness ratios ob-tained from a structural standard and by this specific very FEM-analysis due to severalknown factors:
• The standard needs to be on the safe side in regards to all joints contained inthe category “partially restrained”, whether it be by bolts or welding of any typeand design. In this project only one type of joint has been considered, thus otherjoints which meets the requirements of the standard, but has a lower rotationalstiffness may very well exist.
• The joint stiffness model has been seen to overestimate the stiffness comparedto the very limited amount of experimental data available (the idealized curvein figure 16 by N. Ungkurapinan et. al. described in [12]) . Hence if samemodel is to undergo real life stiffness testing, lower values could be expected,which lowers the buckling capacity, which then again yields a higher effectiveslenderness ratio.
• From the “Weak axis (SS)”-case to the “Weak axis (SP)”-case the deviation fromthe FEM-results is seen to drop by approximately 50% for both Models A-secand B-sec. This supports that either the effective slenderness given by the TIA-Gstandard has some safety or the stiffness model over-predicts rotational stiffness,for each end-restraint in the buckling member. If the error was on the method orof a more general nature same reduction of the deviation might not occur.
• The size of the member for which the joint stiffness has been determined(L100x100x6)is very large for member testing. Some scaling factors could be present, if the ex-pressions in the TIA-G standard is based on test of specimens of smaller profilesizes.
• The type joint model does not resemble a typical bracing joint since the anglebar to which the rotating member is connected is parallel to the rotating memberitself. Furthermore the rotating member is bolted very close to a completely fixedsupport (some 200mm refer to section 5). In typical bracing patterns the bracingmay be connected to a member which is unsupported for several meters. Thismight also lower the rotational stiffness of the joints.
By viewing these known factors all together they all seem to be pointing in the samedirection: The rotational stiffness found from the Abaqus type joint in this projectmight be higher, than what can be expected in a real life bracing joint, and hencethe effective slenderness ratios may be larger for a real life bracing. In light of thisrecognition the effective slenderness ratios will move closer to the actual codal valuesas a more accurate stiffness model is adapted. This may produce a situation werethe effective slenderness ratios for parallel buckling modes may actually exceed thecodal ratios, resulting in the effective slenderness specified by the standard being on theunsafe side, as they are already exceeding these values for high values of slenderness(refer to table 14).
In any case it is some what odd that the effective slenderness expressions in TIA-G, in view of the rotational joint stiffness results previously illustrated in figure 23,which clearly shows that the rotational stiffness about the axis RX is much larger thanabout RY , does not consider separate effective slenderness ratio expressions for weak

81
and parallel axis buckling. Weak axis buckling will have a rotational stiffness whichis a combination of RX and RY , whereas the parallel buckling will have (at worse) arotational stiffness of RY , due to the method by which the bracing is connected to theother structural components of the tower.
In other structural standards for towers such as EN1993-3-1 [2] this fact is ac-counted for by applying a smaller effective slenderness ratio to the weak-axis bucklingthan the parallel axis buckling mode (especially for single bolted angles). Whether theexpressions in TIA-G is on the safe or unsafe side, fact remains that there is a substan-tial difference in the rotational stiffness of angle bar bracing joints by the rotationalaxis considered, which must be accounted for in determining the effective slendernessratio.
The effective slenderness ratio in accordance with the TIA-G and EN1993-3-1 iscompared in figure 38. The figure consists of two sub-figures illustrating the effectiveslenderness ratios for members with or without end-restraints. As mentioned there aresome differences between the TIA-G and EN1993-3-1 standard in regards to determin-ing the effective slenderness ratio of angle bar bracings. The EN-standard does notconsider any difference in effective slenderness for members with partial restraint atone or both ends (as it is the case in TIA-G), however it considers different effectiveslenderness for weak and parallel axis buckling mode. Also the EN-standard does nottake the eccentricity conditions of the member into account, even though the expres-sions seem to generally account for some eccentricity (Effective slenderness is not 0 fora member with 0 slenderness as in the TIA-G concentric member case). In figure 38athe TIA-G curves 1, 5 and 6 are illustrated (concentric loaded member, partial restraintat one and both ends respectively) corresponding to the relevant conditions consideredfor Model B-sec. Furthermore the EN1993-3-1 effective slenderness is represented bydashed lines for weak and parallel axis buckling (both curves are valid for memberswith one or both ends partially restrained, since EN as previously mentioned does notaccount for any difference between the two cases). Finally the results obtained fromthe NL-analysis of the L100x100x7 member (Model B-sec) and sample tower sectionis also included for reference.
In figure 38b the effective slenderness ratios for members without any restraint atends are illustrated. From TIA-G curve 1 and 4 is included and from EN1993-3-1 ef-fective slenderness is represented by dashed lines for weak and parallel axis buckling.Since FEM results has only been obtained for buckling of members with end-restraints,no FEM-results are available. The figure 38a clearly illustrates the deviations in effec-tive slenderness obtained by FEM and from the standards TIA-G and EN1993-3-1.
From viewing the out-of-plane displacements of the Models A-sec and B-sec atbuckling failure, it has been seen that the rotations at the member joints when assuminga sine shaped deflection field, does not exceed 0.01 rad, which is well within the regionwhere stiffness models obtained by assuming a elastic or plastic material model arethe same. Therefore based on the studies of this project assuming material as linearelastic without taking any plasticity into account has proved to be fully sufficient fordevelopment of the type joint rotational stiffness model.

82
0
20
40
60
80
100
120
140
160
180
200
220
0 20 40 60 80 100 120 140 160 180 200 220
Effect
ive s
lendern
ess
KL/
r [-
]
Slenderness L/r [-]
Effective slenderness ratio for angle bar bracings with end-restraints according TIA-G, EN1993-3-1 and FEM results
TIA‐G: Curve 1TIA‐G: Curve 5TIA‐G: Curve 6EN: K2L/r (weak)EN: K2L/r (parallel)FEM: Weak (SP)FEM: Weak (SS)FEM: Parallel (SP)FEM: Parallel (SS)FEM: Sample tower
End‐restraint governs
Eccentricity governs
(a) Effective slenderness ratio for angle bar bracings with end-restraints accord-ing to TIA-222-G:2005, EN1993-3-1 and ROBOT non-linear FEM results fortestspecimen L100x100x7 and sample tower.
0
20
40
60
80
100
120
140
160
180
200
220
0 20 40 60 80 100 120 140 160 180 200 220
Effect
ive s
lendern
ess
KL/
r [-
]
Slenderness L/r [-]
Effective slenderness ratio for angle bar bracings without end-restraints according TIA-G and EN1993-3-1
TIA‐G: Curve 1/Curve 4
EN: K1L/r (weak)
EN: K1L/r (parallel)
Eccentricity governs
End‐restraint governs
(b) Effective slenderness ratio for angle bar bracings without end-restraints accord-ing to TIA-222-G:2005 and EN1993-3-1.
Figure 38: Overall comparison of effective slenderness in accordance with TIA-G, EN1993-3-1 and FEM-results. For determining the EN effective slenderness fy = 355MPa andE = 200000MPa has be used (same properties as type joint). The specified governingfactors on the figures only refer to provisions of the TIA-G standard.

83
8 PerspectivesIn this section the studies of this project is put into perspective, and application of theobtained results is discussed. Finally suggestions to further research and developmenton the application of joint rotational stiffness models in determining effective slender-ness ratios are given.
In this project methods of determining the effective slenderness ratio of angle barbracing members have been examined. Methods were based on both codal practicesand a more scientific approach by application of joint rotational stiffness models innon-linear FEM analysis.
The main difference between the codal and scientific method, is (other than theyproduce different results) the time of computation. Methods given by the standard,will produce effective slenderness ratios in a matter of seconds, whereas the scientificapproach requires a FEM-model and hours of computation. With this project, the timeconsumption of this method can be significantly reduced, and further studies will prob-ably also contribute to reduce time consumption even more. Fact still remains thatapplying joint rotational stiffness models in determining the effective slenderness ratioof bracing members, can never be reduced to the computation of one equation such asit is done in the standards. Several options may however improve the computation andapplication of joint stiffness models. Writing scripts which could automatically model,run, extract and store joint stiffness data from 100 maybe even 500 generic joint con-figurations could improve the application of the method, since the stiffness data wouldbe available at hand for immediate application.
The method has in previous parts of this report been considered suitable for twotypes of application:
• In large scale transmissionline (or telecommunication infrastructure) projectswith a large quantity of identical towers, where greater savings from optimiza-tion is achieved.
• In case of overutilized towers. Based on the results of this project the joint stiff-ness model could assist to increase capacity of members by a few percent poten-tially saving the client the cost of having to strengthen tower members.
In both cases custom programmed FEM-software, which not only features automaticgeneration of tower geometry, but also enables application of elements with joint stiff-ness properties would have to be developed, if tower designs are to be delivered withina time frame which can be accepted by the client. However one obstacle has to be over-come before the rotational stiffness models can be used for tower designs: confirmationby experiments. It must be confirmed that the joint rotational stiffness experienced inreal life can be simulated by the FEM. The method is never going to be commerciallyfeasible, if joint stiffness can not be extracted from a FEM-model with reasonable de-viations to “as-build” behavior.
However it is not only the adequacy with respects to real life behavior which willhave to be investigated in order to utilize the method commercially. Below is givensome areas of investigation which will have to be studied further:
• Confirm the rotational stiffness of angle bar bracing members, based on experi-mental data.
• Based on the rotational stiffness obtained from experiments, FEM-models whichadequately captures this stiffness must be developed.

84
• Investigate factors which could have a influence on rotational stiffness such asloss of bolt tensioning, loss in friction, production tolerances etc.
• Setup guidelines for the development of a “joint stiffness archive”, e.i. determin-ing joint types which should be considered based on governing factors.
Finally it should be pointed out that the above method will potentially only yield some4 to 7 percent in additional member capacity (for weak-axis buckling), dependent onthe type of joint and slenderness of the bracing. Designers should always be verymuch aware of generally following the provisions of the standards, since yielding afew percent in capacity from a advanced joint rotational stiffness model is nothingcompared to the loss in capacity caused by e.g. non-triangulated bracing, as was thecase for the sample tower of this project.

85
9 ConclusionThe main objective of this project was to develop a detailed FEM-model from whichrotational stiffness of a angle bar joint could be obtained and used in a overall non-linear FEM-analysis of angle bar bracing members.
It has been shown that joint stiffness can be captured with somewhat good agree-ment with experimental results, by application of simple FEM-models, however furtherexperimental data is required in order to calibrate the FEM-model to a level at whichit fully captures real life stiffness behavior of angle bar joints. Compared with thesmall amount of experimental data available on joint stiffness, the FEM-models seemto overestimate the joint stiffness. Several parameters which may reduce stiffness hasbeen pointed out, for further study. It is a necessity to investigate each parameter indi-vidually in order to uncover their effects on joint stiffness.
From the magnitude of rotation that the buckling member joint undergoes beforefailure, it has been observed that a rotational stiffness model obtained by considering alinear-elastic material model is adequate for this type of analysis, hence no plasticity isrequired.
It has been found that the ability to produce FEM-models, which can adequatelycapture stiffness behavior of angle bar joints, grants the opportunity to model and an-alyze towers with detailed joint behavior, obtained by parametric FEM-models on acommercial level.
The effective slenderness expressions stated in ANSI/TIA-222-G:2005 have beseen to be of a very general and superficial nature, even though the stiffness of angle barbracing joints is totally dependent on their design. Furthermore joint stiffness has beenobserved to vary by the considered axis of rotation. It may be relevant to develop sep-arate effective slenderness expressions, dependent on the considered axis of bucklingas it is done in the EN1993-3-1 standard. The results of the FEM-analysis would tendto suggest that effective slenderness ratio given in the ANSI/TIA-222-G:2005 standardmay be some what on the unsafe side for parallel buckling, however the expressions oneffective slenderness defined in the standard are very simple and have been producingsafe designs for many years. Through this project it has been illustrated that there is aneed for a method of determining more specific effective slenderness ratios for mem-bers with partial end-restraints, especially for large numbers of identical towers suchas transmission towers, where the very demanding process can be justified by savingsin money spend on materials.
As a secondary objective a comparison of the commercial tower design programRAMTOWER was performed. RAMTOWER was compared with hand calculationand FEM analysis. Several models were considered within each method and their dis-tribution of forces were compared. On the overall scale RAMTOWER performed asper previous experience, yielding no more than 10% deviation from equivalent FEM-models. Through comparison of overall tower reaction, the incorporated wind profilein RAMTOWER has been found accurate and in accordance with the ANSI/TIA-222-G:2005 standard. It should be mentioned that when considering large point loads onthe tower body, deviations in tower member forces have been observed locally at thesection onto which the load is applied. This deviation is cause by a difference in load-application assumptions in RAMTOWER and the other methods. By considering thecharacteristics of telecommunications towers, the deviation is found of no practicalimportance.
During the project the consequences of non-triangulated hip bracing has been stud-ied. It has been illustrated that for a 0 degree wind load case increases in buckling

86
capacity of angle bar bracings can be obtained, since bending stiffness from perpen-dicular bracing can be included. Studies however also show that for 45 degree windload cases no increase is obtained since bracing members, which provided the diago-nal member with bending stiffness in the 0 degree case, is also in compression for the45 degree case, and will therefore not contribute to restrain the member. Due to theratio between diagonal bracing forces for 0 and 45 degree wind load cases it may beconcluded that only a very limited additional capacity (15% in the specific study) isobtained by providing non-triangulated hip bracings. In order to be able to utilize thiscapacity, bending in tower bracings must be included in the analysis by relevant inter-action formulas. It is concluded that non-triangulated bracing should not be present intower structures due to both design and safety reasons. Furthermore the option of in-creasing the cross-sectional area of main members, instead of providing large amountsof secondary bracing members, has been discussed and is especially recommended forsmaller towers.
During this project the FEM-program AUTODESK ROBOT Structural AnalysisProfessional 2011 was applied. A series of tests were performed in order to checkthat the program is suitable for the overall non-linear analysis of angle bar membersexposed to various conditions. Through the experience gathered during the programtesting phase the author has the following comments to the application of ROBOT:ROBOT is a basic and simple FEM-program which has some advantages. HoweverROBOT is not recommendable as a research tool. Non-linear analysis features of theprogram is very limited, as is documentation and examples hereon.

87
APPENDIX


89
A Literature
[1] EN 1993-1-1:2007 Eurocode 3: Design of steel structures - Part 1-1: Generalrules and rules for buildings.
[2] EN 1993-3-1:2007 Eurocode 3 - Design of steel structures - Part 3-1: Towers,masts and chimneys - Towers and masts.
[3] EIA/TIA-222-G: Structural Standard for Antenna Supporting Structures and An-tennas, August 2005.
[4] © Dassault Systèmes. Abaqus Online Documentation: Version 6.10, 2010.
[5] Autodesk. Robot Structural Analysis Professional 2011 - Usersguide, 2010.
[6] Lars Damkilde. The FEM for beam structures (Elementmetode for Bjælkekon-struktioner) (In Danish). The Technical University of Denmark (DTU), 2. edition,1999. Lecturenote F-118.
[7] Lars Dick-Nielsen and Henrik Døssing. Influence of Packingplates in BoltedConnections (Mellemlægspladers betydning i Boltesamlinger) (In Danish). Mas-ter’s thesis, The Technical University of Denmark (DTU), 2004.
[8] J. Yoon & B. Kang J. Kim. Finite Element Analysis and Modeling of Structurewith Bolted Joints. Applied Mathematical Modelling, 31:895–911, 2007.
[9] A. R. Kemp and R.H. Behncke. Behavior of Cross-Bracing in Latticed Towers.Journal of Structural Engineering, 124:360–367, 1998.
[10] R.K.N.D Rajapakse K.I.E Ahmed and M.S. Gadala. Influence of Bolted-JointSlippage on the Response of Transmission Towers Subjected to Frost-Heave. Ad-vances in Structural Engineering, 12(1):1–17, 2009.
[11] L. Lakshmanan Nagesh R. Iyer N. Prasad Rao, G.M. Samuel Knight. Investiga-tion of transmission line tower faliures. Engineering Failure Analysis, 17:1127–1141, 2010.
[12] R.K.N.D Rajapakse N. Ungkurapinan, S.R.De. S.Chandrakeerthy and S. B. Yue.Joint slip in steel electric transmission towers. Engineering Structures, 25:779–788, 2003.
[13] R. Narayanan, editor. Axially Compressed Structures - Stability and Strength.Applied Science Publishers Ltd., 1982.
[14] Ramboll Denmark A/S, Telecom Division. RAMTOWER 3E - Usersguide, 3Eedition, 2010.
[15] Elena Rueda Romero. Finite Element Simulation of Bolted Steel Joint in Fireusing Abaqus Program. Master’s thesis, Tampere University of Technology, 2010.
[16] S. Fang S. Roy and E.C. Rossow. Secondary Stresses on Transmission TowerStructures. Journal of Energy Engineering, 110:157–172, 1984.

90
[17] Stephen P. Timoshenko. Theory of Elastic Stability. McGRAW-HILL BOOKCOMPANY, INC., 2. edition, 1961.
[18] S. Kitipornchai W. Kang, F. Albermani and H. Lam. Modeling and Analysis ofLattice Towers with more accurate models. Advanced Steel Construction, 3:565–582, 2007.

91
B Layout drawing: 40m Medium duty sample towerdesign


93


95
C Sample tower force distribution


97
Hand calc.
RAMTOWER (regular)
RAMTOWER (nodal)
FEM-model (nodal)*
FEM-model (nodal)**
Sec 1 -3,10 -5,16 -3,10 -3,14 -3,14Sec 2 -7,13 -7,12 -7,13 -7,49 -7,49Sec 3 -11,74 -14,26 -11,74 -12,31 -12,31Sec 4 -18,08 -19,70 -18,08 -19,08 -19,08Sec 5 -14,02 -14,16 -14,00 -14,77 -14,78Sec 6 -13,36 -13,48 -13,35 -13,81 -13,8Sec 7 -13,17 -13,26 -13,16 -13,92 -13,93Sec 8 -13,28 -13,39 -13,30 -13,85 -13,84Sec 9 -13,63 -13,69 -13,61 -14,67 -14,67Sec 10 -14,14 -14,19 -14,13 -15,82 -14,95Sec 11 -21,04 -21,01 -21,01 -24,92 -22,19Sec 12 -21,76 -21,76 -21,76 -25,18 -22,44Sec 13 -22,68 -22,66 -22,66 -24,28 -23,42
Reactions from tower considering various methods (0 deg. wind load case)Hand calc.
RAMTOWER (regular)
RAMTOWER (nodal)
FEM-model (nodal)*
FEM-model (nodal)**
Moment 2806 2822 2802 2802 2802Shear 126,4 127 126,4 126,4 126,4
Normal 82,7 82,5 82,6 82,5 82,5
*) Secondary bracings included in FEM-model**) Secondary bracings excluded from FEM-model
Compression forces in diagonal bracings considering various methods (0 deg. wind load case)
) y g

Hand calc.
RAMTOWER (regular)
RAMTOWER (nodal)
FEM-model (nodal)*
FEM-model (nodal)**
Sec 1 -2,54 -1,55 -2,54 -2,18 -2,18Sec 2 -12,42 -12,36 -12,42 -10,22 -10,22Sec 3 -28,53 -27,11 -28,53 -23,01 -23,01Sec 4 -54,50 -54,15 -54,50 -42,62 -42,63Sec 5 -82,27 -82,83 -82,27 -78,18 -77,98Sec 6 -104,55 -105,45 -104,54 -105,58 -105,75Sec 7 -125,11 -126,34 -125,09 -122,51 -122,36Sec 8 -144,78 -146,25 -144,78 -145,12 -145,28Sec 9 -163,80 -165,50 -163,81 -161,03 -160,83Sec 10 -182,55 -184,42 -182,56 -183,39 -183,96Sec 11 -209,58 -211,26 -209,57 -198,07 -202,55Sec 12 -245,88 -248,04 -245,87 -243,26 -248,23Sec 13 -281,93 -284,51 -281,94 -273,5 -276,78
*) Secondary bracings included in FEM-model**) Secondary bracings excluded from FEM-model
Compression forces in legmembers considering various methods (0 deg. wind load case)
98

99
D Examples on calculation of effective slenderness ra-tios based on ANSI/TIA-222-G:2005 standard andnon-linear FEM results
IntroductionIn the following examples on the calculation of effective slenderness ratios obtained bythe TIA-G standard and ROBOT non-linear FEM-analysis are documented. Other thanillustrating the principle of the calculations, the cross-sectional properties which havebe assumed is also documented.
The displacement enclosed by () next to the critical buckling load from non-linearanalysis, is the transverse displacement of the compression member at this load. Allcritical loads from non-linear analysis were found at the state at which a convergentsolution could no longer be obtained. A E-modulus of 200000MPa has been consideredfor all calculations (and FEM-analysis).
Buckling of sample tower diagonal membersMember properties (Based on values from ROBOT):
L60x60x6
A = 691mm2
Iv = 94400mm4
rv =
√94400691
= 11.69mm
Ix = 227900mm4
rx =
√227900
691= 18.16mm
Buckling span: L2 = 3641mmOther subspan (above diagonal crossover point): L1 = 3246.6mm
Effective slenderness ratio as per TIA-G:Since spans (above (L1) and below (L2) diagonal cross-overpoint) are not of same
length, the initial buckling length must be reduced in order to compensate for this. Inthis relation is applied expression given by Timoshenko in [17]. Further study of theexpressions is left to the reader:
ψ(u1)
ψ
(L2L1·u1
) =−L2
L1
where
ψ(u) =3
2u
(1
2u− 1
tan(2u)
)

100
and
L2 ≥ L1
inserting the spans L2 and L1into the equations yields:
ψ(u1)
ψ( 3641
3246.6 ·u1) =− 3641
3246.6⇒ 2u = kl = 2.95212
since
kl2EIL2 =
π2EIL2
for pin connected buckling member, reduced member buckling length (L) due todifferent spans may be found as:(
L2L1
2.95212)2
EI
L22
=π2EI
L2 ⇒ L = 3455mm
parallel axis buckling: Lrx= 190.25⇒ KL
r = 28.6+0.762 ·190.25 = 173.573 (curve5)
Results from ROBOT non-linear analysisModel with pinned diagonal connections:Fcr = 36.44kN (11mm displacement - Parallel axis buckling mode)
36440 =π2 ·200000 ·227900
(KL)2
⇒ KL = 3513.6mm⇒ KL
r = 193.5 (11.5% deviation)
Model with RX and RY rotational stiffness models in diagonal connections:Fcr = 44.86kN (7mm displacement)
44860 =π2 ·200000 ·227900
(KL)2
⇒ KL = 3166.7mm⇒ KL
r = 174.4 (0.4% deviation)
Buckling of L60x60x6 angle bar memberMember properties:
L60x60x6 L = 2000mm
For further cross-sectional parameters refer to section “Buckling of sample towerdiagonal members”

101
Model with RX and RY rotational stiffness models in both ends:
Effective slenderness ratio as per TIA-G:weak axis: L
rv= 171.08⇒ KL
r = 46.2+0.615 ·171.08 = 151.4 (curve 6)parallel axis: L
rx= 110.3⇒ KL
r = 110.3 (curve 1)
Weak axis buckling in ROBOT non-linear analysis:Fcr = 110.7kN (7mm displacement)
110700 =π2 ·200000 ·94400
(KL)2
⇒ KL = 1297.4mm⇒ KL
r = 111.0 (37.6% deviation)
Parallel axis buckling in ROBOT non-linear analysis:Fcr = 154.1kN (5mm displacement)
154100 =π2 ·200000 ·227900
(KL)2
⇒ KL = 1708.6mm⇒ KL
r = 94.08 (17% deviation)
Model with RX and RY rotational stiffness models at one end:
Effective slenderness ratio as per TIA-G:weak axis: L
rv= 171.08⇒ KL
r = 28.6+0.762 ·171.08 = 159 (curve 5)parallel axis: L
rx= 110.3⇒ KL
r = 110.3 (curve 1)
Weak axis buckling in ROBOT non-linear analysis:Fcr = 74.39kN (7mm displacement)
74390 =π2 ·200000 ·94400
(KL)2
⇒ KL = 1582.7mm⇒ KL
r = 135.4 (17% deviation)
Parallel axis buckling in ROBOT non-linear analysis:Fcr = 129.52kN (11mm displacement)
129520 =π2 ·200000 ·227900
(KL)2
⇒ KL = 1863.7mm⇒ KL
r = 102.6 (7% deviation)

102
Buckling of L100x100x7 angle bar memberMember properties (Based on values from ROBOT):
L100x100x7 L = 3000mm
A = 1366mm2
Iv = 531100mm4
rv =
√5311001366
= 19.718mm
Ix = 1282000mm4
rx =
√1282000
1366= 30.6mm
Model with RX and RY rotational stiffness models in both ends:
Effective slenderness ratio as per TIA-G:weak axis: L
rv= 152⇒ KL
r = 46.2+0.615 ·152 = 139.8 (curve 6)parallel axis: L
rx= 97.9⇒ KL
r = 97.9 (curve 1)
Weak axis buckling in ROBOT non-linear analysis:Fcr = 186.25kN (5mm displacement)
186250 =π2 ·200000 ·531100
(KL)2
⇒ KL = 2372.5mm⇒ KL
r = 120.32 (16.2% deviation)
Parallel axis buckling in ROBOT non-linear analysis:Fcr = 309kN (7mm displacement)
309000 =π2 ·200000 ·1282000
(KL)2
⇒ KL = 2861.7mm⇒ KL
r = 93.4 (5% deviation)
Model with RX and RY rotational stiffness models at one end:
Effective slenderness ratio as per TIA-G:weak axis: L
rv= 152⇒ KL
r = 28.6+0.762 ·152 = 144.5 (curve 5)parallel axis: L
rx= 97.9⇒ KL
r = 97.9 (curve 1)
Weak axis buckling in ROBOT non-linear analysis:Fcr = 148.13kN (5mm displacement)
148130 =π2 ·200000 ·531100
(KL)2

103
⇒ KL = 2660.3mm⇒ KL
r = 134.9 (7% deviation)
Parallel axis buckling in ROBOT non-linear analysis:Fcr = 286.75kN (3mm displacement)
286750 =π2 ·200000 ·1282000
(KL)2
⇒ KL = 2970.7mm⇒ KL
r = 97.1 (0.8% deviation)


105
E Abaqus type joint.


107
E.1 Layout drawing


109
E.2 Material hardening curves
Hardening curves
Introduction:The following hardening curves are based on the work by Dick-Nielsen and Døssing [7]. The curves were acheived by means of reverse engineering. The test specimens were applied in normal tension testing, and the results from this consisted of displacements at different force levels excerted on the specimens - A test specimen workcurve. By use of a FEM-model of the test setup material, models were continiously modified until displacements for different force levels matched the workcurve obtained from the material testing.Modifications such as layout and language (from Danish to English) has been implementet by the author.
Structural steel S355Structural steel in accordance with EN10025
Hardening data:Data point 1 2 3 4 5 6 7¹V. Mise stress (σ) [MPa] 356,00 360,00 460,00 560,00 620,00 740,00 946,00Plastic strain (ε pl) [-] 0 0,014 0,039 0,106 0,2 0,8 3
Ultimate material strength²
Calculation Value Unit Parameter
(σ7 - σ6)/(ε7 - ε6) 93,64 MPa/(mm/mm) a
σ7 - (ε7 * a) 665,09 MPa b
- 1,11 (mm/mm) εult
(εult * a) + b 769,03 MPa σult
Hardening curve, incl. ultimate strength
Notes:1) Curve is extrapolated beyond the ultimate strength in order be able to interpolate a solution at ultimate strength.2) Ultimate strength is marked red om hardening curve
Description
Curve slope between last data point (6 - before failure) and extrapolated point (7)
Meassured strain at failure
Ultimate strength
0
100
200
300
400
500
600
700
800
900
1000
0 0,5 1 1,5 2 2,5 3 3,5
V. M
ise
stre
ss [
Mpa
]
Plastic strain [-]
Plastic hardening curve: S355 structural steel
Structural steel S355

Bolts Grade 10.9
Hardening data:Data point 1 2 3 4 5¹V. Mise stress (σ) [MPa] 1071,00 1215,90 1243,00 1350,00 0,00Plastic strain (ε pl) [-] 0 0,061 0,087 0,5 4
Ultimate material strength²
Calculation Value Unit Parameter
(σ7 - σ6)/(ε7 - ε6) -385,71 MPa/(mm/mm) a
σ7 - (ε7 * a) 1542,86 MPa b
- 0,8257 (mm/mm) εult
(εult * a) + b 1224,37 MPa σult
Hardening curve, incl. ultimate strength
Notes:1) Curve is extrapolated beyond the ultimate strength in order be able to interpolate a solution at ultimate strength.2) Ultimate strength is marked red om hardening curve
Curve slope between last data point (6 - before failure) and extrapolated point (7)
Meassured strain at failure
Ultimate strength
Description
0
200
400
600
800
1000
1200
1400
0 1 2 3 4 5
V. M
ise
stre
ss [
Mpa
]
Plastic strain [-]
Plastic hardening curve: Grade 10.9 bolts
Bolts Grade 10.9
110

111
E.3 Stress discontinuities in convergence model
IntroductionIn the following the discontinuities in the axially loaded type joint convergence modelis investigated. Only the discontinuities of the V. Mise stress in the model is investi-gated.
Discontinuities:
(a) Discontinuities in angle bar with probed nodes (the neglected areas, primarily corners, are remove for remainingdiscontinuities to be clearly visible)
(b) Discontinuities in bolt with probed nodes
Figure 39: Stress discontinuities in convergence FEM-model

112
Node V. Mise stress[MPa]
V. Mise stress(Discontinuity)
[MPa]
Discontinuitypercentage of total
stress [%]8329 439.6 619.6 141%6895 450.3 578.1 128%1124 315.1 332.5 106%
11092 545.0 180.5 33%350 300.2 171.0 57%
(a) V. Mise stress discontinuities in angle bar
Node V. Mise stress[MPa]
V. Mise stress(Discontinuity)
[MPa]
Discontinuitypercentage of total
stress [%]5710 370.6 246.9 67%764 463.8 197.7 43%106 682.4 274.0 40%
(b) V. Mise stress discontinuities in bolt
Table 15: Probed V. Mise stress discontinuities in nodes selected from contour plots comparedwith actual stress values.

113
F Digital DocumentationThe DVD in this Appendix contains soft-copies of relevant documents and FEM-models used throughout this project as well as some of the results hereof. Not allthe mentioned FEM-models are included, since some models with great similarities(e.g. simple release or material modifications etc.) was reused to limit the amountof models. Each of the below subsections provide a complete list of files and shortdescriptions.
F.1 DocumentsThe following documents are contained in the attached DVD:
Report No.10-052.pdf - The Main report (this document)AppendixReport No.10-052.pdf - The Appendix Report containing further docu-
mentation on the project workJoint stiffness results.xlsx - Results from the joint stiffness analysis by application
of FEMMaterial hardening.xlsx - Material hardening data for S355 structural steel and
grade 10.9 bolts, by Dick-Nielsen et.al. [7]
F.2 Abaqus FEM-modelsIn all the Abaqus models applied in this project only one copy of each model was made.In each model the material properties were then modified to consider either: “Elastic”,“Perfect-Plastic” or “Plastic with hardening”. The current files all contain result fileson a run with one of the materialproperties. If result are required for a different materialproperty the model must be recomputed.
Folder directories are given in bold below:Axial load (215GPa) - Axially loaded type jointAxial load (215GPa) conv. - Axially loaded type joint for convergence testingAxial-RX load - Axially loaded type joint with applied moment for RX rotationAxial-RY load - Axially loaded type joint with applied moment for RY rotation
F.3 ROBOT FEM-modelsFollowing ROBOT FEM-models are contained in the DVD (ROBOT RTD-files givenin bold):
TESTS:
Buckling L (parallel axis)Simple buckling parallel axis profileBuckling L (main axis) andBuckling L (main axis) mid-supportSimple buckling main axis profileBuckling L modifiedbeam andBuckling L modifiedbeam mid-supportSimpel buckling of modified beam element modelBuckling L modifiedbeam convergenceConvergence in buckling of modified beam element model

114
Complex_Buck_total release,Complex_Buck_w.1 release andComplex_Buck_w.o releaseComplex buckling models with various releasesBuckling_LP_offset Lr 102 andBuckling_LP_offset Lr 204Non-linear offset analysis ROBOT definitionBuckling_LP_manuel offsetNon-linear offset analysis manual definitionNonlinear transverse loadNon-linear transverse loaded beamNonlinear RX in weakNon-linear spring released beam
Analysis:
Basic model-releases-final andBasic model-releases-final inactive bracingModels: FEM-model(nodal)* and FEM-model(nodal)** described in subsection
6.3.1.SEC13 0&45 deg wind no hip bracing,SEC13 0&45 deg wind non-triangulated,SEC13 0&45 deg wind triangulated andSEC13 0&45 deg wind no hip bracing L90x90x9Files contained in the study of non-triangulated hipbracings given in subsection
6.3.2.SEC13 0&45 deg pinned - Model B.SEC13 0&45 deg semirigid - Model C.Loading from above sectionsModel for determining loading on Models B and C from above tower structure.Nonlinear RX and RY par L100x100x7 L=2000,Nonlinear RX and RY par L100x100x7 L=3000,Nonlinear RX and RY par L100x100x7 L=4000,Nonlinear RX and RY par L100x100x7 L=5000,Nonlinear RX and RY weak L100x100x7 L=2000,Nonlinear RX and RY weak L100x100x7 L=3000,Nonlinear RX and RY weak L100x100x7 L=4000,Nonlinear RX and RY weak L100x100x7 L=5000,Nonlinear RX and RY par model L60x60x6 andNonlinear RX and RY weak model L60x60x6Models contained in the comparison in section 7