Analisis Motor Reluktansi Tipe Switched Reluctance Motor ...
Upload
api-19827661Category
view
107download
3
IEEE TRANSACTIONS ON MAGNETICS, VOL. 41, NO. 4, APRIL 2005 1321
Analysis and Characterization of Switched ReluctanceMotors: Part II—Flow, Thermal, and
Vibration AnalysesK. N. Srinivas1, Member, IEEE, and R. Arumugam2, Member, IEEE
Electrical and Electronics Engineering Department, Crescent Engineering College, Chennai 600 048, IndiaElectrical Engineering Department, Anna University, Chennai 600 025, India
This paper presents new approaches for certain mechanical characterizations, such as thermal and vibration analyses, of switchedreluctance motors (SRMs). The paper presents, in three parts, the modeling and simulation procedure for three-dimensional (3-D) finite-element analysis (FEA)-based flow analysis, flow-analysis-based thermal analysis, and a realistic vibration analysis. Section I documentsa computational fluid dynamics (CFD) flow analysis procedure for the evaluation of the air velocity distribution inside the SRM at anyspeed. Section II presents a prediction method for steady-state and transient thermal characteristics of an SRM, using 3-D FEA. Theconvection coefficient at various heat-dissipating surfaces inside SRM, which is not a material property, but a quantity that solely dependson the air velocity at the respective surfaces, is the major parameter to be evaluated for an accurate simulation of heat distribution. Theresults of CFD analysis are used, for the first time on SRM, for this purpose. Windage loss calculation, one of the other applicationsof CFD, is introduced. Vibration in electric motors is an inevitable, at the same time undesirable, property that originates from fourmajor sources: mechanical, magnetic, applied loads and, to a smaller extent, the associated electronic devices. Section III presents: 1) athorough numerical study of vibration analysis in SRMs, using 3-D FEA methodology, covering all the above vibration sources exceptthe electronics; 2) a 3-D modal analysis of SRMs including stator and rotor structures, shaft, end shields, bearings, and housing; 3) anunbalanced rotor dynamics analysis; 4) associated harmonic analysis; and 5) a stress analysis under various loading conditions. The 3-Dvibration analyses presented in this paper to examine the vibration in SRM as a whole are new additions to SRM vibration analysis.Section IV concludes the paper. Future work in every section is highlighted.
Index Terms—Air velocity, computational fluid dynamics, switched reluctance motors, thermal characterization, 3-D finite-elementanalysis, vibration analysis.
I. FLOW ANALYSIS IN SRM
I N switched reluctance motors (SRMs), a progressiveswitching of stator coils in a clockwise direction produces
a magnetic field that enables steady motion of the rotor in acounter-clockwise direction. The aim is now to trace the pathand velocity of the air in the interpolar regions (regions be-tween two adjacent poles, called air pockets) of both stator androtor during the rotation of the rotor. Let the application of theknowledge of air velocity be considered for thermal analysis,in which this will help in the accurate evaluation of convectionheat coefficient at different heat dissipating iron surfaces insidethe machine, which is not a material property, but a quantitythat solely depends on the air velocity.
A. Computational Fluid Dynamics (CFD)
1) Introduction: CFD (for a good treatment, refer to [1]–[3])is predicting what will happen, quantitatively, when fluid flows,often with the complications of simultaneous flow of heat andmass transfer, mechanical movement (in the case of electric ma-chines, the rotor), and stresses in and displacement of immersedor surrounding solids. The “fluid” that flows inside a rotatingelectric machine is the air, which is highly turbulent when therotor rotates. In the great majority of fluid flow problems, pre-cise analytical determinations of fluid velocities are not pos-sible, owing to the complex effects upon the flow of fluid vis-
Digital Object Identifier 10.1109/TMAG.2004.843349
cosity, and a proper assumption and modeling would yield re-alistic solutions of the complicated numeric equations of CFD.Throughout this paper, air gap means the gap between the rotorand stator when they are aligned and air pocket means the airregion at the stator or rotor interpolar region (Fig. 1).
2) Governing Equation: The following are the major as-sumptions made.
a) The flow is turbulent since the operating speed is3000 rpm.
b) The air is steady inside the machine.c) Incompressible fluid analysis is sufficient.Analysis for the determination of the air velocity involves the
determination of the pattern (whirl and turbulence) of the fluidflow.
The governing equation is the two-dimensional (2-D) Laplaceequation given by the following:
(A1)
This Laplace equation is solved by finite-element analysis(FEA) procedures for evaluating the net velocity vector distri-bution in three dimensions (3-D). With the densityof the whirling fluid being , the governing equation in 3-Dbecomes, , that is,
(A2)
3) Preprocessing: The fluid (that is the dry air) has a densityof 1.21 kg/m and kinematic viscosity of 17.6 10 . These areset as the material properties. Fig. 2 shows the meshed model
0018-9464/$20.00 © 2005 IEEE

1322 IEEE TRANSACTIONS ON MAGNETICS, VOL. 41, NO. 4, APRIL 2005
Fig. 1. The FEA model of SRM.
Fig. 2. Meshed model of the stator interpolar air region.
of air pocket in the stator interpolar region. The velocity of airaccording to the operating speed is set as the boundary conditionat the outer periphery of the air pocket.
Consider the air boundary in the rotor interpolar region,which is an arc, as shown in Fig. 3. When velocity of the airis set at the rotor interpolar region, care must be exercised toaccount for this lengthier curvature of the air boundary. Therotor interpolar arc is divided into suitable equal segments. Thearc is divided into ten segments. The velocity is set at eachsegment depending on the angle subtended. The velocities inthe and directions (Fig. 3) will be respectivelyand , where is the rotor velocity at rpm, givenby , in m/s. is the diameter excluding the air gaplength when velocity is calculated for the rotor and is includingthe air gap length when velocity is calculated for the stator.
These velocities are set on each segment of the rotor inter-polar arc. This exercise does not arise with the stator inter-polar air modeling because of the smaller curvature of the airboundary due to six stator poles. Since the curvature is almost astraight line, velocity in direction alone is specified.
Also, it is important to note that the air at the rotor and statorpole surface moves in opposition. The air velocity vector at thesesurfaces are accordingly set as the boundary conditions.
Fig. 3. Meshed model of the subdivided rotor interpolar air region.
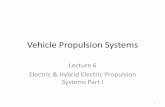
Fig. 4. Flow analysis results indicating the air turbulence and its velocity atdifferent places in the stator interpolar air region at 3000 rpm (5.0265 m/s).
4) Determination of Air Velocity: The interpolar regions ofstator and rotor are modeled separately in order to evaluate theair velocity at different surfaces of SRM for a particular speed.The command FLDATA will perform the flow evaluation using(A2) to get the whirl and turbulence of the air velocity vectorat the considered air pocket. The command PLVECT, V willplot the velocity vector as per its whirl and turbulence direc-tions. /CVAL is a useful command in flow analysis to select aparticular range of velocities. For instance, consider /CVAL, 5,7. This will display air velocity regions between 5 and 7 m/sanywhere inside the SRM. The results of simulation of CFD isshown in Figs. 4 and 5.
For the operating speed of 3000 rpm, the air velocity is5.172 m/s. It is observed from the simulation results that at thesurfaces s4, s5, s6, and s7 the air velocity is between 2.299 and3.448 m/s, which is equivalent to the whirl of air between speed1200 and 2000 rpm. A similar observation in the air pocket atthe rotor interpolar region shows that the iron surfaces s8 ands9 are dissipating heat at the air velocities 2.234 and 3.351 m/s.

SRINIVAS AND ARUMUGAM: ANALYSIS AND CHARACTERIZATION OF SWITCHED RELUCTANCE MOTORS 1323
Fig. 5. Flow analysis results indicating the air turbulence and its velocity atdifferent places in the rotor interpolar air region at 3000 rpm (5.0265 m/s).
Fig. 6. Result of 3-D FEA flow analysis indicating air velocity distribution onthe whole SRM model.
Velocities less than 2 m/s may be ignored as they are not nearthe iron surfaces and oriented at the midregion of the air pocket.
Turbulence of air is inherently 3-D, and hence, air flow anal-ysis in 3-D can only be helpful in predicting the turbulence ofair inside SRM. Results of such a 3-D flow analysis are shownin Fig. 6. It has to be noted that in a 3-D flow analysis, resultscan also indicate varying pressures at various air pockets. Thisis obvious as the velocity of air is not constant. As the pressureof air is not of analysis interest, say for thermal analysis, theanalyst can safely omit it. The option of animating the air tur-bulence when the rotor rotates is possible.
II. FLOW-ANALYSIS-BASED THERMAL ANALYSIS IN SRM
A. Review of Previous Works
Thermal modeling using thermal equivalent circuit of elec-tric motors has been extensively done in the past for thermal
analysis, which dates back to early 1920 [4]. An equivalentthermal circuit for induction motor has been reported in [5],in which different parts of the motor have been representedas lumped parameters of thermal resistors and capacitors inter-connected. The steady-state temperature is calculated based onthe thermal resistances representing the different sections of themotor. Namburi et al. [6] showed how temperature rise is depen-dent on motor loading by fitting curves with different time con-stants and different values of output power. Adopting [6]–[8],Faiz et al., in [9] and [10] determined heat distribution in SRMfor natural and forced cooling using the thermal equivalent cir-cuit model. The thermal analysis for SRM presented in this sec-tion is novel in introducing computational fluid dynamics for de-termining the air velocity distribution inside SRM. The resultsof CFD will help to precisely evaluate the convection coeffi-cient at all the heat dissipating iron surfaces of SRM resultingin a realistic thermal simulation. This section is organized asfollows: The necessary calculations for thermal analysis usingFEA are given in Section II-B. In Section II-C, implementationof CFD for thermal analysis is presented. FEA procedure forsteady-state thermal analysis is given in Section II-D, and thesame procedure for transient thermal analysis considering var-ious duty cycles is elaborated in Section II-E. This section alsopresents transient thermal characteristics including eddy-cur-rent loss distribution and radial fins. Section II-F introduces,in basic terms, application of flow analysis for windage losscalculation.
B. Fundamentals of Thermal Analysis
1) Preprocessing: The governing equation for 2-D finite-el-ement thermal analysis involving respectively heat dissipationprocesses by convection and conduction, in 3-D, is given in thefollowing:
(B1)
whereunknown temperature distribution in degrees kelvin;heat conductivity in degrees kelvin per square meter;heat source in watts per square meter;heat transfer coefficient;ambient temperature in degrees kelvin.
Fig. 1 shows the model of SRM. The material properties ofeach component of the machine, such as thermal conductivity,resistivity, density, Poisson’s ratio, specific heat, etc., are spec-ified. The stator and rotor are chosen to be steel and the perfectconductor option is given for the windings. The density was as-signed to be 7866 kg/m . For a steady-state analysis or for atransient analysis, major material properties necessary are thethermal conductivity and the electric conductivity of the mate-rials. Thermal conductivity is set as 445 K/m , the resistivity isset as 0.021 m/mm , and the ambient temperature is initiallyset as 298 K. After assigning such material properties, the modelis meshed, and the next stage is to fix the boundary conditions.

1324 IEEE TRANSACTIONS ON MAGNETICS, VOL. 41, NO. 4, APRIL 2005
Fig. 7. Location of boundary conditions.
2) Heat Source and the Boundary Condition: In SRM, whenone of the phases is conducting, the ( ) copper loss producedis dissipated as heat. The value of heat flux , evaluated aspower loss in watts per square meter of the surface, is set asthe surface heat source at four vertical sides of the excited statorpole. However, mechanical losses are not considered.
The developed heat is dissipated mainly through the airtrapped in between the stator and rotor poles, other iron sur-faces in the vicinity of the excited phase which are considerablyheated, rotor body, and partly by the outward facing cylindricalyoke. Neglecting the other iron surfaces in the vicinity of theexcited phase, the heat will be dissipated out by the naturalconvection process through the surfaces s1, s2, and s3, as shownin Fig. 7. The respective convection coefficients , and
are specified at these surfaces. The convection coefficientis to be found out for different dissipating surfaces dependingon the shape of the surface and the velocity of the air in contactwith the surface of heat dissipation. There are various formulasavailable for the evaluation of convection coefficients de-pending on the shape of the heat-dissipating surface [11]–[13].The convection coefficient for the surfaces s1, s2, and s3 areevaluated using the following formulas.
a) For the surface s1: The conduction coefficient for thesurface s1 is given in the following:
(B2)
wherethermal conductivity of dry air, W/m K;diameter of the stator up to the stator pole arc, m;Reynold’s numberangular velocity which is, at a speed of rpm,2 , rad/s;kinematic viscocity, m /s;Prandtl number;
where
The values for all the above data for dry are
W m K and
m s
b) For the surface s2 (the surface which dissipates the heatupward by natural convection):
(B3)
where (area/perimeter) .c) For the surface s3 (the surface which dissipates the heat
downward by natural convection:
(B4)
The value of convection coefficient at the heat dissipating sur-faces other than s1, s2, and s3 is usually neglected, which is nottrue in practice. The heat-dissipating surfaces in the interpolarregions, that is the regions of air between the adjacent statorpoles and the adjacent rotor poles, do participate in convectingheat depending on the velocity of air with which they are incontact. Therefore, the convection coefficient at different wallportions is to be evaluated using (B2) at the respective air ve-locities. The results of air flow analysis are used to find out airvelocity, and hence the convection coefficients, at different sur-faces in the machine. The application of , and , and
are shown in Fig. 7.
C. Tracing Air Velocity Vector in Interpolar Regions
A detailed CFD [14] methodology to get the distribution ofthe air velocity vector in the interpolar air pockets has to beperformed earlier. The various air velocities at the surfaces inthe air pocket regions are identified. The respective convectioncoefficients are calculated using (B2). All such ’s arespecified as boundary conditions. The steady-state and transientthermal characterization is then carried out.
D. Steady-State Thermal Analysis
Once the preprocessing, as explained in Section II-B1 iscompleted, then the analysis mode can be either selected assteady-state or transient, respectively, by using commandspost-processing—analysis—thermal—steady-state or post-processing—analysis—thermal—transient. The ambienttemperature was set to be 25 C (298 K) using tamb, 298.
The heat flux and the convection coefficients at the sur-faces s1–s9 are specified and the steady-state simulation is run.The primary data obtainable from the steady-state heat run isthe nodal temperature. The data which can be derived out ofnodal temperatures are the nodal and element thermal fluxesand the nodal and element thermal gradients. To start with, theambient temperature was set as 25 C and a finite-element heatrun was carried out. The simulation resulted in a steady-statetemperature of 30 C. The steady-state simulation is repeatedagain with 30 C as the ambient temperature. The process isrepeated until two successive steady-state temperatures are thesame. The settlement was achieved at a temperature of 35 C.The model with boundary conditions, results of steady-state

SRINIVAS AND ARUMUGAM: ANALYSIS AND CHARACTERIZATION OF SWITCHED RELUCTANCE MOTORS 1325
Fig. 8. Meshed 3-D model of SRM in FEA scenario with the boundaryconditions specified.
Fig. 9. Steady-state temperature distribution.
simulation, and thermal gradients under steady-state conditionsare shown in Figs. 8–10.
E. Transient Thermal Analysis
1) Simulation Procedure and Results: The transient thermalanalysis, in which the temperature varies with respect to time, issimulated for different duty cycles. The setting up of boundaryconditions has certain steps to be followed using “load step”(LS) files. The value of is set on the meshed model of excitedstator poles according to the load pattern. For instance, considerthe intermittent load as shown in Fig. 11. The load step (LS) filesare sequentially created to take care of the changes in and therespective time period, using solution—time-step—sub-stepcommand. The execution of this command will require the re-spective values of changing load and time, which has to be sys-tematically input. Finally, write LS command will be used to
Fig. 10. Isotherm plot showing the different temperature zones in SRM.
Fig. 11. Pattern of the intermittent load.
write the above sequence of LS files as a single file to performtransient thermal analysis. The command outres, all, all mustbe given before simulation to make the final result of th LSfile as the starting values for the th LS file.
An example of intermittent load is considered for illustration(Fig. 11). The ON and OFF periods are 900 s each. The heat flux,
in W/m , is proportional to 7 A at all the ON periods. It is zeroat all the OFF periods. This alternative variation of heat flux andthe respective time duration are is sequentially stored in an LSfile, and the transient thermal simulation is run. The results ofsimulation showing temperature rise from 0 to 10 000 s at statoris shown in Fig. 12.
2) Thermal Analysis Considering Eddy-Current Loss: Thecore loss distribution in SRM is another considerable factor forheat production. Before the boundary conditions are set as de-tailed in this paper for thermal analysis, an iron loss analysishas to be performed to take into account the core loss distri-bution. Fig. 13 depicts the results of eddy-current loss distri-bution as obtained by FEA [15]. The thermal analysis madeon this model will be a simulation considering copper loss andeddy-current loss. The results of simulation conducted on thismodel, showing temperature rise from 0 to 7200 s at stator, forthe continuous load of 7 A, is shown in Fig. 14, which indicatethat the steady-state temperature is attained at 356 K, whereaswithout considering the eddy-current loss, it was 350 K.

1326 IEEE TRANSACTIONS ON MAGNETICS, VOL. 41, NO. 4, APRIL 2005
Fig. 12. Transient temperature-time curve of stator body for the intermittent load.
Fig. 13. Eddy-current distribution model for thermal analysis.
3) Thermal Analysis Considering Fins: The temperaturerise of the electric machines is kept under permissible limits byproviding fins. It is possible to increase the heat energy transferbetween the outer surface of the machine and the ambient airby increasing the amount of the surface area in contact withthe air. Fins are the corrugations provided throughout the outersurface of the frame. When fins are provided on the outer frameof the machine, as shown in Fig. 15, the surface area of heatdissipation gets increased, thus effecting the heat dissipation. Itis of the kind called radial fin with rectangular profile.
In order to increase the fin effectiveness, various possiblecombinations of fin dimensions are to be considered. Steady-state thermal analysis has to be carried out for each combina-tion. The fin dimension which produces the least steady-state
temperature rise is usually selected for the end product. Table Iis the summary of steady-state thermal analysis performed onvarying fin dimensions. The fin with a thickness of 2 mm and alength of 3.5 mm is declared for the end product as it producedthe least steady-state temperature of 329.893 K. Figs. 16 and 17respectively represent the results of steady-state and transientthermal analyses on the SRM with radial fins.
F. Another Application of Flow Analysis
One another major application of flow analysis is windageloss calculation. Windage or air friction is the term generallyused to denote the loss due to fluid drag on a rotating body. Theaccurate prediction and reduction of windage loss is becomingmore important with the growing development of high-speedmachinery. Information published in the open literature is sparseand addresses cases of large machinery at lower speeds. Thissection attempts to introduce a flow analysis based procedure,to calculate the windage loss in high-speed SRM.
Two approaches available in the reference for the evaluationof air friction, that is the windage, loss are used. In the firstmethod (complete derivation in [16]), the air friction loss is cal-culated using
watts (B5)
where the friction factor is determined as
(B6)
Equation (B5), termed as head loss in fluid dynamics, is equiv-alent to the fluid friction (that is windage) loss. Air friction lossis evaluated individually at all the heat dissipating walls of theair pockets at the respective air velocities. The summation willthen yield the total windage loss.
In the second method (full derivation of the formula in [17]),the formula of (B7) is used to determine the air friction loss

SRINIVAS AND ARUMUGAM: ANALYSIS AND CHARACTERIZATION OF SWITCHED RELUCTANCE MOTORS 1327
Fig. 14. Transient heat distribution in stator considering copper loss and eddy-current loss distribution.
Fig. 15. Model of SRM with fins and terminal box.
at various wall portions in the air pockets, at the respective airvelocities. The summation of all the air friction losses at thewalls of the air pockets at the respective air velocities will givethe total windage loss
watts (B7)
However, this is an overall introduction to emphasize that theknowledge of air velocity at every air portion of a machine willyield windage loss which will be far from approximations. Ulti-mately, from an electrical point of view, all of the windage lossresults in drag on the rotor. A careful prediction of forces on therotor to get the drag, in conjunction with the air-velocity-based
TABLE ISTEADY-STATE THERMAL ANALYSIS RESULTS FOR VARIOUS
DIMENSIONS OF RADIAL FINS
calculations mentioned in this section, will help to fine-tune theresults. This can be considered as a future work to elevate thissection.
Similarly optimizing the insulations used in various parts ofthe machine, which depends on the heat dissipating capacity ofthe machine and which in turn is an air-velocity-dependent, isalso a notable extension of air flow analysis.

1328 IEEE TRANSACTIONS ON MAGNETICS, VOL. 41, NO. 4, APRIL 2005
(a)
(b)
Fig. 16 (a) Steady-state temperature distribution in SRM with fins (a) at fullload and (b) at twice the full load.
III. 3-D VIBRATION ANALYSES OF SRM
A. Introduction
When a phase is excited, the magnetic flux from the excitedstator pole crosses the air gap in a radial direction producinglarge radial forces on the excited stator poles, which deformthe stator into an oval shape, called ovalization. It is impera-tive to know the frequencies (called the modal frequencies) atwhich the radial forces are induced, as the coincidence of thenatural frequency of the stator with any of the modal frequencieswill cause resonance resulting in vibration and noise. A modalstudy will yield the possible frequencies (and hence the respec-tive speeds) to be skipped for a quiet operation of the machine.There are major papers available in the literature to investigatevibrations in SRM, from the machine’s side and also from thecontroller’s side [18]–[24], based on 2-D modal analysis con-
sidering the stator frame alone. Although the stator is the majorportion of noise production, there are contributions from otherparts such as rotor core, end rings, bearings, shaft, and appliedloads which were believed to be negligible in the above earlierattempts. A 3-D FEA is capable of accounting for all these parts.Section III-B describes the modal analysis on SRM in 3-D con-sidering the rotor, shaft, end shields, bearings, and housing.
Section III-C records the simulation procedure for unbal-anced rotor dynamic analysis on SRM, which is essential toverify whether the vibration of rotor including housing is withinthe acceptable limits. This section also reports on the harmonicanalysis to identify the frequencies at which the vibration ismaximum due to the rotor eccentricity.
Vibration due to machine coupling with a load, pulley, andbelt tension, and mounting of SRM on foundation is examined inSection III-D. This is simulation of load test on SRM. Modelingof different auxiliaries and consideration of different loads arethe highlights of the section.
B. Modal Analysis Including Housing
The SRM model under consideration and the meshes formedduring FEA are shown in Fig. 18. The length of the stator stackis 90 mm. The end shield has thickness of 10 mm. The shaft hasa diameter of 25 mm. The main values set during simulationare: The Young’s modulus N/m ; specific mass ofwinding kg/m ; total mass density kg/m ;Poisson’s ratio .
In the SRM, it is found that resonance occurs if the phasefrequency or add harmonics coincides with the stator naturalfrequency, resulting in a peaking of the stator frequency. Thephase frequency is given by [25]
(C1)
where is the speed in radians/s and is the number of rotorpoles. Vibration is maximum if any of the frequencies
(C2)
are coincident with the natural frequency of the machine givenby [25]
(C3)
where is the stator iron thickness in meters, is the massdensity of the material in kilograms/cubic meter, and is themean radius of the stator shell in meters given bywhere is the outer diameter of the stator.
The governing Laplace equation that is solved iteratively tofind the modal frequencies is
(C4)
where is the modal vector, and is the frequency of vibra-tion. The solution is the th mode shape and is the corre-sponding natural frequency.
The 3-D modal analysis reveals certain modes which areproducing vibration (and the associated acoustic noise) inSRM due to rotor and housing structures. The mode fre-quency of 231.154 Hz (3467 rpm), shown in Fig. 19(a), isobserved to produce twist of rotor. Modal frequency of 160 Hz

SRINIVAS AND ARUMUGAM: ANALYSIS AND CHARACTERIZATION OF SWITCHED RELUCTANCE MOTORS 1329
Fig. 17. Transient temperature distribution in SRM with fins for a continuous load.
Fig. 18. 3-D model of SRM with stator, rotor, shaft, end shield, housing, andbearing.
[Fig. 19(b)] causes shaft bend with a severity at the shaft-rotoredge. Frequency of 364.5 Hz causes rotor structure and rearshaft vibration [Fig. 19(c)] and at 231.15 Hz [Fig. 19(d)], therotor deforms at an angle. At modal frequencies of 3089 Hz
Fig. 19. 3-D modal analysis results at mode frequencies (a) 231.154, (b) 160,(c) 364.5, and (d) 231.134 Hz.
[Fig. 20(a)], 1910 Hz [Fig. 20(b)], and 161 Hz [Fig. 20(c)],the housing also gets involved in contributing vibration. Therotor rocks up and down causing it to strike against the stator,transmitting the vibration till housing and foundation. The shaftbends. The drive may not be able to handle any load at thesespeeds. At 900 Hz [Fig. 20(d)], the housing with foundationundergoes vibration.

1330 IEEE TRANSACTIONS ON MAGNETICS, VOL. 41, NO. 4, APRIL 2005
Fig. 20. 3-D modal analysis results at mode frequencies (a) 3089, (b) 1910, (c) 161, and (d) 900 Hz.
C. Unbalanced Rotor Dynamics
A harmonic frequency analysis has been performed to iden-tify whether the vibration of rotor and housing is within saferange. The aim is to obtain the SRM structure response at sev-eral frequencies with respect to displacement. Peak responsesare identified and plotted as a graph. Stresses are reviewed atthese frequencies.
The weight of the rotor (w) is 3.75 kg. The balancing quantity( ) and the damping ratio ( ) were assumed to be 2.5 and 0.02,respectively, which are the usual standard values for high-speedmachines. The rated speed is 3000 rpm. The centrifugal force iscalculated using the formula
(C5)
As all the units are in millimeters, the g used is 9810, whichgives the centrifugal force, , as 0.3. This is applied to thecenter node of the rotor, as a lateral load. Arresting the nodes atthe foundation forms one of the boundary conditions to modelthat the SRM is bolted to the foundation. In case of SRM,the whole housing also sit on the bearings. So, the is set
throughout the outer housing surface and to the front and rearbearings.
This is a constant force applied over a frequency range. Thefrequency range was assumed to be 400, which is on the upperside. The “harmonic analysis” to identify the possible high vi-brating and noise producing speed bandwidth which is skippedfast during accelerations, is performed on this model using theFE package. The unbalance force , at a frequency , is
. But, the force which the FE package finds will be at . Ithas to be converted as , using a small program.
The result of the simulation is shown in Fig. 21.It can be observed that the rotor eccentricity reaches a max-
imum of 6 m only, that is, 6 10 mm whereas that of outerframe is 1 10 mm. As this eccentricity is of negligible mi-crometers, it is conclusive that the rotor dynamics of the consid-ered SRM is in acceptable limits.
D. Static Stress Analysis
1) Methodology: Static analysis is simulating a load test onSRM for observations in limit violations of stress and deforma-tion at different places. Additional models required are bearings

SRINIVAS AND ARUMUGAM: ANALYSIS AND CHARACTERIZATION OF SWITCHED RELUCTANCE MOTORS 1331
Fig. 21. Results of unbalanced rotor dynamic analysis.
Fig. 22. Result of static stress analysis at full load.
and pulley. Bearing is the element in SRM to hold the housingand the rotor mass at the shaft. So, bearing is simulated as foursprings attached to the housing from the bearing locations (frontand rear). The node at the front bearing location and four nodesat the housing each displaced by 90 in and axes are se-lected and joined. A similar procedure is repeated at the rearside of the shaft. The spring stiffness (21 000) is assigned andbearing is thus modeled. The pulley is modeled by assigning itsweight at the end of the front shaft.
The required data are: the radius of the shaft mm; outerdiameter of pulley mm; thickness of pulley mm;
weight of pulley kg; belt prestress and housing kg.The full load of 3.63 N m is considered. As the assignment ofload, etc., are in force units, the equivalent kgf m is
kgf m. Using the radius of the shaft and converting allquantities to a single unit, the force is kg.This force is spread over all the finite-element nodes at the shaftend. It is observed that there are 12 nodes. Thus, the equiva-lent force applied to each of the 12 nodes in direction is5.1. Further, the sum of the weight of pulley and belt loadingmechanism, belt’s prestress and the housing with stator, whichamounts to 7.85 kg, is divided to all the 12 nodes in a similarway and applied at the direction, as they act downwards.At this full-load model, a “stress analysis” is run whose outputis shown in Fig. 22. Winding weight is considered as net massalong with the weight of the stator.
The material considered has a maximum tensile stress of45 kg/mm . The stress in the SRM on full load is simulatedto be 21 kg/mm . It can readily be observed that the factor ofsafety is for the full-load case. Thus, the SRMcan be operated at full load without any mechanical threat. Thisanalysis can be extended for any load by a suitable applicationof boundary conditions.
IV. CONCLUSION
This paper, made up of three parts, discussed respectively,flow analysis, flow-analysis-based thermal analysis, and vibra-tion analysis, all by 3-D FEA procedure (using FEA packageANSYS v. 6.0), for the first time for SRM. A procedure to tracethe velocity distribution inside SRM is presented in Section I ofthe paper. Section II presented a procedure to simulate steady-state and transient thermal characterization using the knowledgeof air velocity distribution inside the machine obtained usingthe air flow analysis. It may be noted that an accurate thermalanalysis would not have been possible had the air flow anal-ysis been not conducted because, in such a nonflow analysis,the convection coefficient could only be specified at air gapregions, and not in the interpolar air regions, which will approx-imate the simulation results to a greater extent. The fact of lam-inated stator and rotor is neglected. The results were presentedby considering the excitation of one phase. The temperature in-ternal to SRM is uniform and that all of the temperature riseis from the ambient air surrounding the machine inside to thestator’s outer surface. It has been observed that the steady-statetemperature is 350 K considering only copper loss, whereas itreaches 359 K considering the eddy loss also. Provision of finsenhances the heat dissipation; the steady-state temperature isthen 333 K. Notable future works are inclusion of iron and me-chanical losses, fine tuning the analysis by considering the lam-inations and, on these improvements, a dynamic heat run. InSection III, the stator, stator frame, rotor, end-rings, bearings,shaft, pulleys, and applied loads have been modeled in 3-D tostudy the vibration in SRM as a whole [26], [27]. The eccen-tricity in the SRM rotor including housing is found to be muchless from the rotor dynamic study. From the static stress anal-ysis, the reviewed stresses reveal that the stresses are under safelimit at full load.

1332 IEEE TRANSACTIONS ON MAGNETICS, VOL. 41, NO. 4, APRIL 2005
REFERENCES
[1] J. D. Anderson, Jr., Computational Fluid Dynamics: McGraw-Hill In-ternational Editions, 1995.
[2] H. R. Valentine, Applied Hydrodynamics, S.I. ed: ELBS, 1970.[3] S. D. Calverley, G. W. Jewell, and R. J. Saunders, “Aerodynamic losses
in switched reluctance motors,” Inst. Elect. Eng. Proc. Elect. PowerAppl., vol. 147, no. 6, pp. 443–338.
[4] G. F. Luck, “The cooling of electric machines,” AIEE Trans., vol. 45, pp.1278–1288, 1923.
[5] R. L. Kotnik, “An equivalent thermal circuit for nonventilated inductionmotors,” AIEE Trans., p. 1600, 1955.
[6] N. R. Namburi and T. H. Barton, “Thermal modeling of an inductionmotor,” IEEE Trans. Power App. Syst., vol. 102, no. 8, p. 2636, Aug.1983.
[7] S. E. Zocholl, “Thermal protection of induction motors enhanced by in-teractive electrical and thermal models,” IEEE Trans. Power App. Syst.,vol. PAS-103, no. 7, p. 1949, 1984.
[8] P. R. Mellor, D. Roberts, and D. R. Turner, “Lumped parameter thermalmodel for electric machines of TEFC design,” Inst. Elect. Eng. Proc. B,vol. 138, no. 5, p. 205, 1991.
[9] J. Faiz and A. Dadgari, “Heat distribution in switched reluctance drives,”J. IEEE-Australia, vol. 12, no. 4, pp. 349–361.
[10] F. R. Jawad, I. Iranpur, and P. Pillay, “Thermal model for a switchedreluctance motor of TEFC design during steady and transient operation,”Elect. Mach. Power Syst., vol. 26, no. 10, pp. 77–91, 1998.
[11] F. Kreith and M. S. Bohn, A Text Book on Procedure of HeatTransfer. New York: Huper and Row, 1986, p. 341.
[12] K. Razenjevic, Handbook of Thermodynamics Tables andCharts. New York: McGraw-Hill, 1976.
[13] J. P. Holman, Heat Transfer. New York: McGraw Hill, 1976.[14] J. D. Anderson, Jr., Computational Fluid Dynamics: Mc-Graw Hill In-
ternational Editions, 1995.[15] K. N. Srinivas and R. Arumugam, “Eddy current characterization of
switched reluctance motors through finite element analysis,” Associa-tion for the Advancement of Modeling & Simulation Techniques in En-terprises (A.M.S.E.), vol. 75, no. 1, 2, pp. 41–51.
[16] R. W. Fox and A. T. McDonald, Introduction to Fluid Dynamics, 4th ed:Wiley, 1972, p. 327.
[17] [Online]. Available: www.brainstandley.com.ee.lab/fil/ee320-exp4-full.pdf
[18] C. G. C. Neves, R. Carlson, N. Sadowski, J. P. A. Bastos, N. S. Soeiro,and S. N. Y. Gerges, “Vibrational behavior of switched reluctance motorsby simulation and experimental procedures,” IEEE Trans. Magn., vol.34, no. 5, pp. 3158–3161, Sep. 1998.
[19] C. Yongxiao and W. Jianhua, “Analytical calculations of natural frequen-cies of Stator of switched reluctance motor,” in Proc. 8th Int. Conf. Elec-tric Machines and Drives, 1997, pp. 81–85.
[20] C.-Y. Wu and C. Pollock, “Analysis and reduction of vibration andacoustic noise in the switched reluctance drive,” IEEE Trans. Ind. Appl.,vol. 31, no. 1, pp. 91–98, Jan./Feb. 1995.
[21] P. Pillay and W. Cai, “An investigation into vibrations in switched re-luctance motors,” IEEE Trans. Ind. Appl., vol. 35, no. 3, pp. 589–596,Mar./Apr. 1999.
[22] P. Pillay, R. M. Samudio, M. Ahmed, and P. T. Patel, “A chopper-con-trolled SRM drive for reduced acoustic noise and improved ride throughcapability using super capacitors,” IEEE Trans. Ind. Appl., vol. 31, no.5, pp. 1029–1038, Sep./Oct. 1995.
[23] A. Michaelides and C. Pollock, “Reduction of noise and vibration inswitched reluctance motors,” in Proc. IEEE-IAS Annu. Meeting, 1996,pp. 771–778.
[24] Y. Tang, “Characterization, numerical analysis, and design of switchedreluctance motors,” IEEE Trans. Ind. Appl., vol. 33, no. 6, pp.1542–1552, Nov./Dec. 1997.
[25] V. Vijayraghavan and R. Krishnan, “Noise in electric machines,” IEEETrans. Ind. Appl., vol. 35, no. 5, pp. 1007–1014, Sep. 1999.
[26] K. N. Srinivas, “Analysis and characterization of switched reluctancemotors,” Ph.D. dissertation, Anna University, Chennai, India, Jan. 2003.
[27] K. N. Srinivas and R. Arumugam, “Static and dynamic vibrationanalyses of switched reluctance motors including bearings, housing,rotor dynamics, and applied loads,” IEEE Trans. Magn., vol. 40, no. 4,pp. 1911–1919, Jul. 2004.
Manuscript received October 8, 2004; revised November 4, 2004.
K. N. Srinivas (M’03) received the Diploma in electrical and electronics en-gineering (DEEE) from Chengalvarayan Polytechnic, Chennai, India, in 1985with high first class honors, the M.E. degree from Annamalai University, India,in 1993 with first class with distinction, and the Ph.D. degree from Anna Uni-versity, India, in 2004.
He is currently an Assistant Professor in the Electrical Engineering Depart-ment at Crescent Engineering College, Chennai, India. He visited Japan, Sin-gapore, Malaysia, Thailand, and the United States during his research period topresent his findings at IEEE international conferences. His contribution in theIEEE international conference, IECON 2000, held in Japan, and IECON 2003,held in the USA, received the best contribution award by the IEEE industrialelectronics society which includes a citation and fellowship. He has more than19 international journal and conference publications. His technical interests areelectric machines and drives and their performance evaluation through simu-lations and power system state estimation, unit commitment, and contingencyanalysis.
R. Arumugam (M’03) received the B.E. degree and the M.Sc. degree (Engg.) inpower systems engineering from the College of Engineering, Guindy, Chennai,India, in 1969 and 1971, respectively, and the Ph.D. degree in electric machineanalysis and design from Concordia University, Montreal, QC, Canada, in 1987.
He is a Professor of Electrical Engineering at Anna University, Chennai,India. He is currently the Director of the Electrical and Electronics EngineeringDepartment, where he leads a team of engineers in electric machines and drives.He is actively involved in industrial consultancy with major Indian industriessuch as TVS Luacs Ltd., BPL Telecom Ltd., and Tamilnadu electricity board.