ANÁLISE ELECTROMAGNÉTICA E COMPORTAMENTO TÉRMICO DE ... · With the expansion of this technique...
95
ANÁLISE ELECTROMAGNÉTICA E COMPORTAMENTO TÉRMICO DE MAGNETOS DE RMN-CCR Bruno Inácio Pereira Dissertação para obtenção do Grau de Mestre em Engenharia Electrotécnica e de Computadores Orientador: Prof. Doutor Duarte de Mesquita e Sousa Júri Presidente: Prof. Doutor Maria Eduarda de Sampaio Pinto de Almeida Pedro Orientador: Prof. Doutor Duarte de Mesquita e Sousa Vogal: Doutor António Eusébio Velho Roque Novembro 2014
-
Upload
phungkhuong -
Category
Documents
-
view
213 -
download
0
Transcript of ANÁLISE ELECTROMAGNÉTICA E COMPORTAMENTO TÉRMICO DE ... · With the expansion of this technique...

ANÁLISE ELECTROMAGNÉTICA E COMPORTAMENTO
TÉRMICO DE MAGNETOS DE RMN-CCR
Bruno Inácio Pereira
Dissertação para obtenção do Grau de Mestre em
Engenharia Electrotécnica e de Computadores
Orientador: Prof. Doutor Duarte de Mesquita e Sousa
Júri
Presidente: Prof. Doutor Maria Eduarda de Sampaio Pinto de Almeida Pedro
Orientador: Prof. Doutor Duarte de Mesquita e Sousa
Vogal: Doutor António Eusébio Velho Roque
Novembro 2014

iii
Agradecimentos
Agradecimentos
Gostaria de começar por agradecer ao meu Orientador, Professor Doutor Duarte de Mesquita e Sousa
o apoio dado durante o projecto, a sua participação activa e os esforços realizados para disponibilizar
todos os recursos necessários.
Aos meus colegas e amigos Pedro Fernandes, Ricardo Gago e João Bernardo agradeço a companhia,
amizade, boa disposição e constante incentivo moral.
Aos meus colegas de universidade, aos meus colegas de residência e a todos os amigos em geral, que
nem sempre consegui dar a atenção necessária e que gostaria, agradeço pela amizade e óptimas
experiências partilhadas ao longo do meu curso
Agradeço ainda à minha namorada o apoio e paciência que as etapas mais complicadas do projecto
exigiram.
Finalmente, e como os últimos são os primeiros, agradeço à minha família o carinho e apoio
incondicional e constante ao longo de todo o meu percurso académico, sem o qual não estaria agora
a concluir esta página.
A todos os mencionados e aos injustamente esquecidos, o meu muito obrigado!


v
Resumo
Resumo
A Ressonância Magnética Nuclear (RMN) de Campo Cíclico Rápido (CCR) é uma técnica experimental
baseada nas propriedades magnéticas de certos núcleos atómicos. Esta técnica pode fornecer
informações detalhadas sobre a estrutura, dinâmica, estado de reacção e ambiente químico das
moléculas. Esta técnica é muito utilizada nas mais variadas áreas de investigação como Física,
Química, Medicina, Farmácia entre outras.
A mesma técnica requer espectrómetros capazes de variar o campo magnético entre diferentes níveis
de intensidade de forma rápida e precisa. Contudo é necessário garantir uma relação entre a
intensidade do campo magnético e a frequência do sinal de radiofrequência que permite a detecção do
sinal emitido pela amostra.
Com a expansão da utilização desta técnica a novas áreas, como a indústria petrolífera e alimentar,
torna-se pertinente investigar novas soluções para implementação da técnica. Este trabalho apresenta
uma solução para a fonte de alimentação responsável por alimentar o magneto e um estudo térmico
do magneto. A fonte de alimentação apresentada tem a preocupação de cumprir com as especificações
que a técnica de RMN-CCR requer. A validação da solução apresentada é feita por simulação. O estudo
térmico do magneto é realizado a duas dimensões com recurso ao software de elementos finitos (Finite
Element Method Magnetics, “FEMM”).
Palavras-chave
Espectrómetro, Fonte de alimentação, Magneto, Ressonância Magnética Nuclear, Campo Cíclico
Rápido, Estudo Térmico.


vii
Abstract
Abstract The Fast Field Cyclic Nuclear Magnetic Resonance (NMR-FFC) is a research technique that explores
the magnetic properties of atomic core. This technique can provide detailed information on the structure,
dynamics, reaction state and chemical environment of molecules. This technique has a high use in
various research areas such as Physics, Chemistry, Medicine, Pharmacy and others.
The same technique requires spectrometers that allow to switch the magnetic field between different
intensity levels quickly and accurately. However, it is necessary to ensure a relationship between
magnetic field and the frequency of the radio frequency signal which allows the detection of the signal
emitted by the sample.
With the expansion of this technique to new areas such as oil and food industry, it is pertinent to
investigate new solutions for implementation of the technique. This work presents a solution to make up
the power supply responsible for supply the magnet and a thermal study of the magnet. The power
supply has presented the worry to meet the specifications that the NMR-FFC technique requires. The
validation of the presented solution is done by simulation. The magnet thermal study is performed in two
dimensions using the finite element software ( Finite Element Method Magnetics, "FEMM").
Keywords
Spectrometer, Power Supply, Magnet, Nuclear Magnetic Resonance, Fast Field Cycling, Thermal
Study.


ix
Índice
Índice
Agradecimentos ..................................................................................... iii
Resumo .................................................................................................. v
Abstract ................................................................................................. vii
Índice ..................................................................................................... ix
Lista de Figuras ..................................................................................... xi
Lista de Tabelas .................................................................................... xiii
Lista de Abreviaturas ............................................................................ xv
Lista de Símbolos................................................................................. xvii
1. Introdução ...................................................................................... 1
1.1 Âmbito ..................................................................................................... 2
1.2 Estado da arte ......................................................................................... 4
1.3 Objectivos ................................................................................................ 8
1.4 Organização da dissertação .................................................................... 8
2. Enquadramento............................................................................ 11
2.1 A técnica de Ressonância Magnética Nuclear ...................................... 12
2.2 A técnica de RMN-CCR ......................................................................... 13
2.3 Espectrómetro de RMN-CCR ................................................................ 15
2.4 Magneto................................................................................................. 17
3. Fonte de Alimentação .................................................................. 19
3.1 Especificações para fonte de alimentação ............................................ 20
3.2 Circuito eléctrico da fonte de alimentação ............................................. 20
3.2.1 Conversor CC/CC ................................................................................................ 20
3.2.2 Circuito para transição ascendente e descendente ............................................ 23
3.2.3 Ajustes para implementação do circuito .............................................................. 26
3.3 Sistema de controlo de Corrente ........................................................... 27
x
3.4 Simulação do circuito da fonte de alimentação ..................................... 32
3.5 Balanço de potências ............................................................................ 38
3.5.1 Potências fornecidas pelas fontes de tensão ao circuito .................................... 39
3.5.2 Potências dissipadas nos semicondutores ......................................................... 41
3.5.3 Potência dissipada por efeito de Joule na resistência do magneto .................... 43
3.6 Dimensionamento do dissipador ........................................................... 44
4. Estudo Térmico do Magneto ........................................................ 47
4.1 Constituição do magneto ....................................................................... 48
4.2 Propriedades dos materiais ................................................................... 49
4.3 Estudo com elementos finitos (FEMM) .................................................. 49
5. Conclusões .................................................................................. 55
5.1 Evolução dos espectrómetros de RMN-CCR ........................................ 56
5.2 Fonte de Alimentação ............................................................................ 56
5.3 Magneto................................................................................................. 57
5.4 Trabalhos futuros ................................................................................... 57
Referências ........................................................................................... 59
Anexo 1 ................................................................................................. 61
Anexo 2 ................................................................................................. 67
Anexo 3 ................................................................................................. 73

xi
Lista de Figuras
Lista de Figuras Figura 1.1 – Diagrama de blocos de um espectrómetro de RMN-CCR. ....................................... 2
Figura 1.2 – Representação esquemática do funcionamento do magneto. ................................. 3
Figura 1.3 – STELAR “Spinmaster FFC-2000 Relaxometer” (2004) [Satheesh, 2004]. ............... 4
Figura 1.4 – Bobina utilizada no modelo “Spinmaster FFC-2000” [Satheesh, 2004].................... 5
Figura 1.5 – Sistema de refrigeração e fonte de alimentação [Satheesh, 2004]. ......................... 5
Figura 1.6 – Circuito equivalente de magneto e fonte de alimentação [Satheesh, 2004]. ........... 6
Figura 1.7 – Fotografia do modelo "Spinmaster FFC200", sem sistema de refrigeração [Satheesh, 2004]. ................................................................................................................... 6
Figura 1.8 – Fotografia do equipamento "SMARtracerTM" [Satheesh, 2004] . ............................ 7
Figura 1.9 – Espectrómetro desenvolvido no IST (2ª versão), à esquerda a fonte de alimentação e à direita o magneto [Roque, 2014a]. ................................................................ 7
Figura 2.1 – Movimento de precessão de um protão. ................................................................. 12
Figura 2.2 – Ciclo generalizado da técnica de RMN-CCR. ......................................................... 13
Figura 2.3 – Sinal de precisão livre (FID). ................................................................................... 14
Figura 2.4 – Espectrómetro de RMN-CCR mecânico. ................................................................ 15
Figura 2.5 – Topologia de um espectrómetro de RMN-CCR. ..................................................... 16
Figura 2.6 – Evolução da corrente gerada pela fonte de alimentação. ...................................... 16
Figura 2.7 – Representação tridimensional do magneto em estudo [Roque, 2014b]. ................ 17
Figura 2.8 – Representação a duas dimensões do magneto. .................................................... 18
Figura 3.1 – Forma de onda típica para alimentar o magneto. ................................................... 20
Figura 3.2 – Esquema do conversor redutor. .............................................................................. 21
Figura 3.3 – Evolução da corrente em regime transitório e em regime permanente. ................. 22
Figura 3.4 – Circuito para transição ascendente. ....................................................................... 24
Figura 3.5 – Circuito equivalente com os semicondutores ao corte. .......................................... 25
Figura 3.6 – Circuito final da fonte de tensão.............................................................................. 26
Figura 3.7 – Circuito da fonte de alimentação e magneto a simular. .......................................... 27
Figura 3.8 – Esquema do conversor com sistema de controlo. .................................................. 28
Figura 3.9 – Modelo equivalente do conversor. .......................................................................... 28
Figura 3.10 – Modelo equivalente do magneto. .......................................................................... 29
Figura 3.11 – Diagrama de blocos do sistema. ........................................................................... 29
Figura 3.12 – Diagrama de blocos completo do sistema. ........................................................... 30
Figura 3.13 – Sistema completo da fonte de alimentação do espectrómetro RMN-CCR. ......... 32
Figura 3.14 – Evolução temporal de entrada e saída do sistema de um período com dois níveis de corrente. ........................................................................................................ 34
Figura 3.15 – Transição ascendente (𝑡𝑜𝑛 = 3 𝑚𝑠) da corrente no magneto. ............................. 35
Figura 3.16 – Transição ascendente (𝑡𝑜𝑛 = 6 𝑚𝑠) da corrente no magneto. ............................. 36
Figura 3.17 – Transição descendente (𝑡𝑜𝑓𝑓 = 3 𝑚𝑠) da corrente. ............................................. 36
Figura 3.18 – Transição descendente (𝑡𝑜𝑓𝑓 = 6 𝑚𝑠) da corrente. ............................................ 37
Figura 3.19 – Evolução temporal de entrada e saída do sistema quando a corrente de referencia toma vários valores. ........................................................................................... 38
Figura 3.20 – Evolução da corrente do magneto em regime estacionário, para diferentes níveis de corrente. ........................................................................................................ 38

xii
Figura 3.21 – Ciclo generalizado da técnica de RMN-CCR. ....................................................... 39
Figura 3.22 – Evolução temporal das correntes provenientes das fontes de tensão e potência instantânea fornecida pelas fontes de tensão. .................................................. 40
Figura 3.23 – Potencias instantâneas fornecidas pelas fontes de tensão. ................................. 41
Figura 3.24 – Identificação dos semicondutores por regime de funcionamento......................... 42
Figura 3.25 – Evolução temporal das potências dissipadas ao longo dos semicondutores durante um ciclo de funcionamento. ............................................................................... 43
Figura 3.26 – Evolução temporal da potência dissipada na resistência interna do magneto. .... 43
Figura 3.27 – Equivalente do circuito térmico do semicondutor e dissipador. ............................ 44
Figura 3.28 – Dissipador para IGBT (Fabricante: Fischer Elektronik). ....................................... 45
Figura 4.1 – Foto do magneto em estudo [Roque, 2014b]. ........................................................ 48
Figura 4.2 – Corte transversal do magneto com respectivas dimensões. .................................. 50
Figura 4.3 – Resultado da simulação em elementos finitos sem espaçamento entre enrolamentos. .................................................................................................... 50
Figura 4.4 – Resultado da simulação em elementos finitos com espaçamento de 1 𝑐𝑚 entre enrolamentos. .................................................................................................... 51
Figura 4.5 – Resultado da simulação em elementos finitos com espaçamento de 1 𝑐𝑚. Entre enrolamentos e ventilação. ................................................................................ 52

xiii
Lista de Tabelas
Lista de Tabelas Tabela 2.1 – Campo magnético no entreferro em função da corrente Im. .................................. 18
Tabela 3.1 – Influencia dos ganhos do controlador PI na resposta do sistema. ........................ 33
Tabela 3.2 – Potências dissipadas pelos semicondutores. ........................................................ 42
Tabela 3.3 – Potencia dissipada na resistência interna do magneto. ......................................... 44
Tabela 4.1 – Propriedades dos materiais do magneto [Engineering,2014], [Mspc, 2014]. ........ 49
Tabela 4.2 – Temperaturas atingidas no magneto sem ventilação. ........................................... 52
Tabela 4.3 – Temperaturas atingidas no magneto com ventilação. ........................................... 52

xv
Lista de Abreviaturas
Lista de Abreviaturas BBP Bloembergen-Purcell-Pound
CC Corrente Contínua
CCR Campo Cíclico Rápido
IGBT Insulated Gate Bipolar Transistor
ITAE Integral of Time multiplied by Absolute Error
FEMM Finite Element Method Magnetics
FID Sinal de precessão livre (Free Induction Decay)
MOSFET Metal Oxide Semicondutor Field Effect Transistor
PI Controlador Proporcional-Integral
RF Radiofrequência
RMN Ressonância Magnética Nuclear

xvi

xvii
Lista de Símbolos
Lista de Símbolos
�⃗� Campo magnético (𝑇)
�⃗� 0 Campo magnético de Zeeman (𝑇)
𝐵0𝐷 Campo magnético de Detecção (𝑇)
𝐵0𝐸 Campo magnético de Evolução (𝑇)
𝐵0𝑃 Campo magnético de Polarização (𝑇)
�⃗� 𝑅𝐹 Campo magnético de radiofrequência (𝑇)
𝐶 Condensador (𝐹)
𝐷 Díodo
𝐷𝑎𝑢𝑥 Díodo auxiliar
𝐷𝑅𝐿 Díodo de roda livre
𝐼𝑚 Corrente no magneto (𝐴)
𝐼𝑚𝑚á𝑥 Corrente máxima no magneto (𝐴)
𝐼𝑚𝑚𝑒𝑑 Valor médio da corrente no magneto (𝐴)
𝐼𝑚𝑚í𝑛 Corrente mínima no magneto (𝐴)
𝐼𝑚𝑟𝑒𝑓 Corrente de referência (𝐴)
𝐼𝑡𝑐 Corrente no momento de passagem ao corte (𝐴)
𝐽 Densidade de corrente eléctrica
𝐾 Ganho do semicondutor
𝐾𝐼 Ganho integral do controlador
𝐾𝑃 Ganho proporcional do controlador

xviii
𝑙𝑒𝑓 Comprimento do entreferro (𝑚)
𝐿𝑚 Indutância do magneto (𝐻)
𝑁 Número total de enrolamentos no magneto
𝑛𝑠 Vector normal ao caminho s
𝑃𝐷 Potência dissipada no díodo 𝐷 (𝑊)
𝑃𝐷𝑎𝑢𝑥 Potência dissipada no díodo 𝐷𝑎𝑢𝑥 (𝑊)
𝑃𝐷𝑅𝐿 Potência dissipada no díodo 𝐷𝑅𝐿 (𝑊)
𝑃𝑂𝑁 Potência dissipada na condução dos semicondutores (𝑊)
𝑃𝑅 Potência dissipada na resistência do magneto (𝑊)
𝑃𝑆 Potência dissipada no semicondutor 𝑆 (𝑊)
𝑃𝑆𝑎𝑢𝑥 Potência dissipada no semicondutor 𝑆𝑎𝑢𝑥 (𝑊)
𝑃𝑉 Potência fornecida pela fonte de tensão 𝑉 (𝑊)
𝑃𝑉𝑎𝑢𝑥 Potência fornecida pela fonte de tensão 𝑉𝑎𝑢𝑥 (𝑊)
𝑅𝐶 Resistência para descarga do condensador (𝛺)
𝑅𝑚 Resistência do magneto (𝛺)
𝑅𝑡ℎ𝑐−𝑑 Resistência térmica entre a cápsula e o dissipador (°𝐶/𝑊)
𝑅𝑡ℎ𝑑−𝑎 Resistência térmica entre o dissipador e o meio ambiente (°𝐶/𝑊)
𝑅𝑡ℎ𝑗−𝑐 Resistência térmica entre a junção e a cápsula (°𝐶/𝑊)
𝑆 Semicondutor totalmente comandado (IGBT)
𝑆𝑎𝑢𝑥 Semicondutor totalmente comandado auxiliar (IGBT)
𝑇1 Tempo de relaxação longitudinal (𝑠)
𝑇2 Tempo de relaxação transversal (𝑠)

xix
𝑇𝑎 Tempo de atraso do semicondutor (𝑠)
𝑇𝑎𝑚𝑏 Temperatura ambiente (°𝐶)
𝑡𝑐 Tempo de passagem ao corte do semicondutor (𝑠)
𝑇𝑗 Temperatura da junção do semicondutor (°𝐶)
𝑡𝑜𝑛 Tempo da transição ascendente da corrente (𝑠)
𝑡𝑜𝑓𝑓 Tempo da transição descendente da corrente (𝑠)
𝑇𝑍 Constante de tempo do magneto (𝑠)
𝑢𝑐 Tensão fornecida pelo controlador (𝑉)
𝑉 Fonte de tensão em regime estacionário (𝑉)
𝑉𝑚 Tensão aos terminais do magneto (𝑉)
𝑉𝑎𝑢𝑥 Fonte de tensão auxiliar (𝑉)
𝑉𝑂𝑁 Tensão aos terminais do semicondutor em condução (𝑉)
𝑉𝑆 Tensão aos terminais do díodo (𝑉)
𝑉𝑆 Tensão aos terminais do semicondutor (𝑉)
𝑊𝐶 Energia armazenada no condensador ( 𝐽)
𝑊𝐿 Energia armazenada na bobina ( 𝐽)
𝛾 Constante giromagnética (𝑟𝑎𝑑 𝑇−1 𝑠−1)
𝛿 Factor de ciclo
∆𝐼𝑚 Variação da corrente em regime estacionário (𝐴)
∆𝑖𝑚 Variação da corrente numa transição (𝐴)
∆𝑡𝐷 Intervalo de tempo de Detecção (𝑠)
∆𝑡𝐸 Intervalo de tempo de Evolução (𝑠)
xx
∆𝑡𝑃 Intervalo de tempo de Polarização (𝑠)
∆𝑣𝐶 Variação da tensão aos terminais do condensador (𝑉)
𝜇 Momento magnético nuclear (𝐴 𝑚2)
𝜇0 Permeabilidade magnética do vácuo (𝜇0 = 4𝜋 × 10−7 𝐻/𝑚 )
𝜏𝑅𝐶 Constante de tempo do circuito RC (𝑠)
𝜔0 Frequência de Larmor (𝑟𝑎𝑑 𝑠−1)

Capítulo 1
Introdução
1. Introdução
Neste capítulo pretende-se explicar e contextualizar a dissertação. Apresenta-se uma breve explicação
da técnica de Ressonância Magnética Nuclear (RMN) de Campo Cíclico Rápido (CCR) e da
constituição de um espectrómetro de RMN-CCR.
De seguida faz-se o levantamento do estado actual da técnica e dos modelos de espectrómetros
conhecidos e comercializados.
Por fim apresentam-se os objectivos deste trabalho bem como a estrutura do mesmo.

2
1.1 Âmbito
A Ressonância Magnética Nuclear (RMN) é uma técnica experimental que se baseia nas propriedades
magnéticas de certos núcleos atómicos para determinar propriedades físicas ou químicas de átomos
ou moléculas nos quais eles estão contidos. Esta técnica pode fornecer informações detalhadas sobre
a estrutura, dinâmica, estado de reacção e ambiente químico das moléculas. Esta técnica é muito
utilizada nas mais variadas áreas de investigação como Física, Química, Medicina, entre outras.
Nesta técnica um conjunto de átomos é estimulado por um campo magnético de Zeeman (�⃗� 0).
Paralelamente, é emitido um sinal de radiofrequência sobre os átomos e monitorizada a forma como
ressoam. O tempo de resposta dos átomos activados pelo campo magnético depende do material que
estiver a ser estudado.
De acordo com a condição de Larmor, a frequência de ressonância varia linearmente com o campo
magnético (�⃗� 0) e com a constante giromagnética do material (𝛾). Dessa forma, as frequências utilizadas
em RMN variam entre alguns Hz até centenas de MHz. Contudo as técnicas convencionais de RMN
não são aplicadas quando o campo magnético é inferior a 100 𝑚𝑇, devido a uma relação sinal ruido
pouco satisfatória, o que deu origem à técnica de RMN de Campo Cíclico Rápido (CCR).
Com a técnica de RMN-CCR é possível efectuar experiências para frequências entre o campo
magnético terrestre e os 0,4 𝑇, e assim estudar novos materiais, que devido à sua constante
giromagnética (𝛾) não poderiam ser estudados pelas técnicas convencionais de RMN. Apesar de ser
possível utilizar esta técnica para campos magnéticos mais elevados, normalmente isso não se verifica
por opções técnicas.
Na Figura 1.1 está representado de forma esquemática, a composição de um espectrómetro de RMN-
CCR. Cada bloco desempenha uma função específica para o funcionamento do espectrómetro.
Fonte de Alimentação
Unidade de RF
Software
Sist. Aquisição
Magneto
Am
ostra
Figura 1.1 – Diagrama de blocos de um espectrómetro de RMN-CCR.

3
A Unidade de radiofrequência, RF, possui um emissor, um receptor, uma ponte de desacoplamento e
uma bobina de RF. O emissor gera um sinal em tensão e quando esse sinal é aplicado à bobina de RF
dá origem a um campo magnético (�⃗� 𝑅𝐹) perpendicular ao campo magnético gerado pela bobina
principal do magneto. Quando cessa o sinal do emissor, a amostra passa a irradiar magnetização que
é detectada pela bobina RF. O receptor recebe o sinal e envia-o para o sistema de aquisição, que
codifica o sinal para depois ser analisado numa aplicação computacional, desenvolvida
especificamente para este fim.
Outro bloco muito importante no espectrómetro é a fonte de alimentação. Esta é responsável por gerar
e controlar a corrente que alimenta o magneto, para a produção do campo magnético �⃗� 0 que se
pretende para a técnica de RMN-CCR.
O magneto representado na Figura 1.2, é composto por um núcleo ferromagnético e bobinas que criam
o campo magnético �⃗� 0. A amostra é colocada no entreferro de forma a ficar sujeita ao campo magnético
�⃗� 0, a indução magnética deve ser o mais uniforme possível.
Núcleo Ferromagnético
Bobina
Bobina
Amostra
Figura 1.2 – Representação esquemática do funcionamento do magneto.
Ao longo dos últimos anos, verifica-se um aumento na utilização deste tipo de equipamento. Novas
áreas como a indústria alimentar e petrolíferas passaram a requerer equipamentos e protocolos de
medida com especificações distintas e mais exigentes, sendo por isso, uma técnica em crescente
desenvolvimento com poucas opções de escolha por parte dos laboratórios. Este tipo de equipamentos
tem custos muito elevados e são comercializados por uma única empresa, STELAR.

4
A ambição de construir equipamentos mais económicos e eficientes levou alguns investigadores do
Instituto Superior Técnico a desenvolver um protótipo para um espectrómetro de RMN-CCR. Este
protótipo encontra-se em funcionamento, tendo sido obtidos resultados satisfatórios. Contudo, existe
uma grande margem de progressão com vista ao melhoramento da eficiência e da homogeneidade do
campo magnético.
Tendo presente que os semicondutores utilizados na electrónica de potência têm sofrido algumas
evoluções, que permitirão construir equipamentos com melhores eficiência, menores dimensões e mais
económicos.
1.2 Estado da arte
Os equipamentos de RMN-CCR que tem sido utilizados ao longo dos últimos anos são fabricados por
uma empresa italiana denominada STELAR. Esta empresa é responsável por grande parte dos
equipamentos instalados nos laboratórios de investigação e desenvolvimento europeus e americanos.
Em 2004 a STELAR deu a conhecer um pouco mais do seu equipamento chamado “Spinmaster
FFC2000” publicando um artigo [Satheesh, 2004], onde constam algumas descrições do equipamento,
nomeadamente o magneto, a fonte de alimentação e o sistema de refrigeração.
Aquando da publicação do artigo referido, o Espectrómetro de RMN-CCR comercializado pela STELAR
tinha a aparência representada na Figura 1.3.
Figura 1.3 – STELAR “Spinmaster FFC-2000 Relaxometer” (2004) [Satheesh, 2004].
Este modelo é constituído por um magneto com aspecto solenoidal, feito por Noack e Schweikert, onde
cada bobina é cortada a partir de um único cilindro de metal com um passo variável da hélice, por forma
a formar um campo magnético homogéneo no seu interior.

5
Figura 1.4 – Bobina utilizada no modelo “Spinmaster FFC-2000” [Satheesh, 2004].
Este tipo de magneto é percorrido por corrente muito elevadas, o que provoca um grande aquecimento
no mesmo. Assim o modelo inclui um sistema de refrigeração responsável por estabilizar a temperatura
do magneto. O sistema da STELAR utiliza um circuito fechado com um fluido especial que é
quimicamente inerte, tem baixa viscosidade e uma boa capacidade térmica. A imagem do sistema de
refrigeração de 15 𝑘𝑊, que serve tanto o magneto como a sua fonte de alimentação, é mostrado na
Figura 1.5.
Figura 1.5 – Sistema de refrigeração e fonte de alimentação [Satheesh, 2004].
A fonte de alimentação consegue fornecer 15 𝑘𝑊 de potência, e utiliza uma configuração apresentada
na Figura 1.6. Esta topologia possui uma fonte de tensão principal, 𝑉1, e um banco de transístores
MOSFET, que é utilizado para controlar a corrente do sistema. Também possui uma fonte de tensão
negativa ,𝑉2, que permite compensar a corrente em excesso no magneto [Kimmich, 2004].

6
Figura 1.6 – Circuito equivalente de magneto e fonte de alimentação [Satheesh, 2004].
Actualmente este equipamento continua a ser comercializado, tendo sofrido alguma alterações desde
então. O equipamento mais actual da STELAR tem a mesma designação “Spinmaster FFC2000”,
Figura 1.7 [STELAR, 2014].
Figura 1.7 – Fotografia do modelo "Spinmaster FFC200", sem sistema de refrigeração [Satheesh, 2004].
As principais características deste modelo são:
𝐵0𝑚á𝑥 = 1 𝑇;
Controlo de temperatura de −140 𝑎 + 140º𝐶 com uma resolução de ±0,1º𝐶;
Capacidade de medição do tempo de relaxação desde fracções de milissegundos a segundos;
Medidas desde alguns 𝑘𝐻𝑧 até 42.6 𝑀𝐻𝑧 (para a frequência de Larmor para o protão 𝐻1 ).
Este sistema é bastante volumoso e requer um sistema de refrigeração do magneto também volumoso
e dispendioso. Tal como referido anteriormente o magneto atinge temperaturas muito elevadas no seu
funcionamento normal, o que leva a introdução de um sistema de refrigeração com elevados consumos
de água e energia. Para além disso o sistema de refrigeração requer manutenções regulares, o que o
torna ainda mais dispendioso. A sua potência elevada (22 𝐾𝑊) gera consumos energéticos muito
elevados.

7
Apesar de este equipamento continuar a ser comercializado, muitos laboratórios não têm capacidades
de suportar os seus custos, o que levou a STELAR a criar, recentemente, um modelo mais económico.
Este modelo foi designado “SMARtracerTM” e está representado na Figura 1.8.
Figura 1.8 – Fotografia do equipamento "SMARtracerTM" [Satheesh, 2004] .
Este equipamento é mais limitado, no que se refere à banda de frequências que consegue atingir, mas
a sua dimensão é bastante menor em relação ao modelo anterior. As características principais são:
𝐵0𝑚á𝑥 = 0,25 𝑇;
Controlo de temperatura de −140 𝑎 + 140º𝐶 com uma resolução de ±0,1º𝐶;
Capacidade de medição dos tempos de relaxação longitudinal e transversal;
Medidas desde os 10 𝑘𝐻𝑧 até 10 𝑀𝐻𝑧 (para a frequência de Larmor para o protão 𝐻1 ).
Este equipamento necessita de uma potência cerca de 10 vezes menor que o modelo anterior, apesar
de ainda ser uma potência bastante elevada. Para além da sua limitação no que respeita à banda de
frequências, também o tamanho da ponta de prova foi reduzido para metade.
Paralelamente foi desenvolvido no Instituto Superior Técnico (pelo centro de Física da Matéria
Condensada e pelo departamento de Engenharia Electrotécnica), um espectrómetro de RMN-CCR,
que se encontra no laboratório de Cristais Líquidos e RMN do IST, sendo esse espectrómetro um
protótipo que conta com três versões.
Figura 1.9 – Espectrómetro desenvolvido no IST (2ª versão), à esquerda a fonte de alimentação e à direita o
magneto [Roque, 2014a].
8
Na Figura 1.9 pode observar-se uma foto da segunda versão do espectrómetro desenvolvido no IST.
A fonte de alimentação e o magneto tem dimensões reduzidas comparado com os modelos
apresentados pela empresa STELAR. A fonte de alimentação tem 27 𝑐𝑚 × 43 𝑐𝑚 × 29 𝑐𝑚 e o
magneto tem 17,5 𝑐𝑚 × 24 𝑐𝑚 × 21 𝑐𝑚 (altura×largura×profundidade). As principais
características deste equipamento são:
Controlo linear do campo magnético entre ≈ 0 até 0,21 𝑇;
Potencia reduzida (120 𝑊 em regime permanente);
Aplicação computacional de utilização simples;
Apesar de não estar a ser comercializado, estimam-se preços reduzidos fase aos
equipamentos comercializados;
Custos de manutenção baixos.
1.3 Objectivos
Com este trabalho pretende-se efectuar o estudo de uma fonte de alimentação alternativa para o
espectrómetro de RMN-CCR, com capacidade de gerar corrente até 10 𝐴, permitindo aumentar a
intensidade de campo obtida no magneto, face aos protótipos actuais. Para isso será utilizado um
circuito diferente do circuito actualmente implementado, que se adapte ao recente magneto
desenvolvido no IST.
Também se pretende efectuar a análise electromagnética e do comportamento térmico do magneto e
da fonte de alimentação do espectrómetro de RMN-CCR.
1.4 Organização da dissertação
A dissertação está dividida em 5 capítulos: Introdução; Enquadramento; Fonte de Alimentação; Fonte
de Alimentação; Fonte de Alimentação.
No capítulo 1 ( Introdução), é realizado o âmbito e o contexto deste trabalho Depois fazer o
levantamento do estado actual dos espectrómetros de RMN-CCR conhecidos e comercializados. Por
fim apresentar os objectivos deste trabalho bem como a estrutura do mesmo.
No capítulo 2( Enquadramento), é apresentado, com mais detalhe, a técnica de RMN-CCR, bem como
alguns conceitos relacionados com a mesma. Analisa-se a constituição e funcionamento de um
espectrómetro de RMN-CCR.
No capítulo 3 ( Fonte de Alimentação), desenvolve-se o circuito eléctrico para a fonte de tensão de
alimentação, assim como o sistema de controlo que garante estabilidade e rapidez de resposta do
9
sistema. Posteriormente, o sistema desenvolvido é simulado através do software Matlab/Simulink. E
para além disso, é efectuado um balanço de potências fornecidas e dissipadas no circuito. E analisar a
necessidade de usar dissipadores de calor.
No capítulo 4 ( Fonte de Alimentação), é realizado o estudo térmico do magneto com recurso a um
software de elementos finitos 2D (Finite Element Method Magnetics, “FEMM”).
No capítulo 5 ( Fonte de Alimentação), é analisada a evolução dos espectrómetros de Ressonância
Magnética Nuclear (RMN) de Campo Cíclico Rápido CCR) e são retiradas as conclusões sobre o
circuito da fonte de alimentação elaborado, identificando os aspectos positivos e negativos da solução
desenvolvida. Por último são realizadas as conclusões relativas ao estudo térmico do magneto.


Capítulo 2
Enquadramento
2. Enquadramento
Este capítulo tem como objectivo apresentar a técnica de Ressonância Magnética Nuclear (RMN), bem
como apresentar alguns conceitos relacionados com a mesma.
Apresenta-se com um pouco mais de detalhe a técnica de RMN de Campo Cíclico Rápido (CCR) e a
constituição e funcionamento de um espectrómetro de RMN-CCR. Também é efectuada uma
comparação entre os primeiros espectrómetros construídos e os espectrómetros actuais.

12
2.1 A técnica de Ressonância Magnética Nuclear
A Ressonância Magnética Nuclear (RMN) é uma técnica espectroscópica, como tal, permite estudar a
estrutura e dinâmica molecular de um composto. Este estudo é feito com base na análise de
absorção/emissão da frequência de radiação electromagnética em função da frequência.
Desde que a técnica de RMN começou a ser estudada por Bloembergen-Purcell-Pound (BPP) em 1948
que se tornou evidente que os mecanismos de ressonância magnética viriam a ser muito importante
num alargado número de aplicações [Ferrante,2004].
Nesta técnica a amostra (com um núcleo de spin magnético não nulo) é submetida a um campo
magnetizo de Zeeman (�⃗� 0), o que faz com que momento magnético nuclear realize um movimento de
precessão em torno de �⃗� 0.
Figura 2.1 – Movimento de precessão de um protão.
O movimento que o momento magnético nuclear precessa em torno de �⃗� 0 possui uma velocidade
angular 𝜔0, esta velocidade depende da constante giromagnética e da indução magnética aplicada,
sendo dada por [Roque, 2014a]:
𝜔0 = 𝛾 𝐵0 (2.1)
Em que 𝛾 é a constante giromagnética do material, e 𝜔0 representa a velocidade angular que é usual
designar-se frequência de Larmor. Para além do campo �⃗� 0, a amostra é submetida a um campo �⃗� 𝑅𝐹
(oscilante com a frequência de Larmor), perpendicular a �⃗� 0. O campo �⃗� 𝑅𝐹 é normalmente na região
das radiofrequências (RF). A submissão da amostra a este campo magnético faz alterar a distribuição
dos momentos magnéticos (𝜇 ). A magnetização varia desde o ponto em que o campo �⃗� 𝑅𝐹 é aplicado
até a situação de equilíbrio coincidente com o campo magnético �⃗� 0 [Constantin, 1996] [Gil, 1986] e
[Seitter, 1999].
Após a aplicação de �⃗� 𝑅𝐹 irão ocorrer fenómenos de relaxação, que tendem a restabelecer a situação

13
de equilíbrio encontrada antes da aplicação do impulso RF. Durante este fenómeno podem ser medidos
os tempos de relaxação, tempos de relaxação longitudinal (𝑇1) e tempos de relaxação transversal (𝑇2).
O tempo de relaxação longitudinal está relacionado com a evolução da componente de magnetização
segundo o sentido e direcção do campo �⃗� 0. O tempo de relaxação transversal está relacionado com a
componente de relaxação segundo o eixo perpendicular ao campo de magnetização [Roque, 2014a].
Para a obtenção destes tempos existem dois métodos clássicos:
Manter �⃗� 0 constante e varia a frequência RF (�⃗� 𝑅𝐹);
Variar �⃗� 0 e manter a frequência RF constante (�⃗� 𝑅𝐹).
Outro método que advém dos métodos clássicos é o método de RMN de Campo Cíclico Rápido (CCR)
Este método será analisado na secção seguinte.
2.2 A técnica de RMN-CCR
Na técnica de RMN-CCR faz-se variar o campo magnético 𝐵0 e é emitido um pulso de RF quando a
intensidade do campo magnético é máximo. Esta técnica é geralmente utilizada para medir tempos de
relaxação longitudinais (𝑇1) para campos magnéticos entre o campo magnético terrestre até 0,4 𝑇 ,
enquanto as técnica de RMN convencionais são utilizadas para campos magnéticos superiores. O ciclo
generalizado desta técnica é ilustrado na Figura 2.2 [Kimmich, 2004].
B0P=B0D
B0E
B0(t)
t(ms)
ΔtDtonΔtEΔtP toff
Tempo de
Evolução
Tempo de
Detecção
Tempo de
Polarização
Impulso RF
t1 t2 t3 t4 t5 t6 T
Figura 2.2 – Ciclo generalizado da técnica de RMN-CCR.
A amostra é submetida a um campo de polarização 𝐵0𝑃 durante um intervalo de tempo que
permita que a magnetização esteja em equilíbrio, ∆𝑡𝑃 ≥ 5 𝑇1(𝐵0𝑃). De seguida altera-se o campo
magnético para um valor de campo mais baixo, denominado campo magnético de evolução 𝐵0𝐸. Esta

14
transição tem o objectivo de polarizar a amostra de forma que a magnetização se torne o mais intensa
possível e depois provocar uma variação na magnetização, durante o tempo de evolução ocorrem
processos de relaxação. Após alguns milissegundos volta a elevar-se o campo magnético para 𝐵0𝐷(o
campo de polarização e de detecção podem apresentar valores diferentes, geralmente 𝐵0𝐷 ≥ 𝐵0𝑃).
Mantendo o campo magnético num valor elevado (𝐵0𝐷), são emitidos (um ou vários) pulsos RF (instante
𝑡5), por forma a rodar o vector de magnetização para um plano perpendicular ao campo magnético
𝐵0𝐷. A frequência do sinal RF emitido tem que estar em ressonância com o campo magnético 𝐵0𝐷,
segundo a expressão (2.1). Após o sinal RF cessar (instante 𝑡6), a magnetização da amostra vai tender
para a sua posição de equilíbrio verificando-se por isso uma variação do valor da magnetização, que
no instante inicial tem o seu valor máximo e vai anular-se na situação de equilíbrio. A variação da
magnetização provoca uma variação da força electromotriz aos terminais da bobina RF, essa variação
é registada e corresponde ao sinal de precessão livre (“Free Induction Decay” (FID) [Anoardo, 2001],
[Noack, 1986], [Kimmich, 1997].
V
t
FID
Figura 2.3 – Sinal de precisão livre (FID).
Na Figura 2.3 está representado um sinal de FID típico, através da obtenção deste sinal para diferentes
ciclos de campo é determinado o tempo de relaxação longitudinal (𝑇1), fazendo a aproximação do sinal
a uma função exponencial.
Para realizar esta técnica é necessário preencher os seguintes requisitos:
é necessário ajustar os tempos de comutação à amostra a estudar. Ou seja 𝑡𝑜𝑛 ≪ 𝑇1(𝐵0𝐸) e
𝑡𝑜𝑓𝑓 ≪ 𝑇1(𝐵0𝐷);
o campo magnético deve ser preciso e estável, normalmente uma precisão da ordem dos 10−2
é suficiente para grande parte das aplicações.

15
2.3 Espectrómetro de RMN-CCR
Em 1951, Pound propôs um espectrómetro que permitia utilizar esta técnica. Trata-se de um sistema
mecânico muito simples, no entanto o sistema era pouco eficaz. O sistema está representado na
Figura 2.4. Este sistema utiliza um carreto para deslocar a amostra entre dois magnetos com campos
magnéticos fixos. Este sistema mecânico permite obter a transição entre níveis de indução magnética
diferentes. O Magneto 1 opera a uma indução magnética fixa e intensa é utilizado nas zonas de
polarização e detecção. Por outro lado, o Magneto 2 é responsável por produzir uma indução magnética
mais fraca, amostra é submetida a esta indução na zona de evolução. Para que não exista
sobreposição entre os campos magnéticos, os magnetos tem de ser afastados, normalmente 1,5 𝑚.
Amostra
Magneto 1 Magneto 2
Figura 2.4 – Espectrómetro de RMN-CCR mecânico.
O sistema utiliza ar comprimido para deslocar a amostra o mais rápido possível. No entanto, devido ao
afastamento entre os magnetos, os tempos de comutação são lentos (𝑡𝑜𝑛 = 𝑡𝑜𝑓𝑓 ≥ 50𝑚𝑠). Outra
desvantagem deste sistema é que ao movimentar a amostra, esta fica sujeita a grandes acelerações e
travagens, o que causa interferências nas medições pretendidas. Com estas limitações, os resultados
obtidos através deste sistema mecânico são insatisfatórios.
Com o crescente interesse na aplicação da técnica de RMN-CCR, começaram a ser desenvolvidas
soluções tecnológicas baseadas em fontes de alimentação, que permitem que no mesmo magneto seja
possível variar o campo magnético rapidamente .
Actualmente são utilizados espectrómetros de RMN-CCR puramente eléctricos que utilizam uma
topologia idêntica à representada na Figura 2.5 [Sousa, 2010].

16
Núcleo Ferromagnético
Bobina
Bobina
Fonte de Alimentação
Unidade de RF
Software
Sist. Aquisição
Corrente
Figura 2.5 – Topologia de um espectrómetro de RMN-CCR.
A Unidade de RF possui um emissor, um receptor, uma ponte de desacoplamento e uma bobina de RF
em torno da amostra. O emissor gera um sinal em tensão e com frequência em ressonância com o
campo �⃗� 0 quando esse sinal é aplicado à bobina de RF dá origem a um campo magnético (�⃗� 𝑅𝐹)
perpendicular ao campo magnético gerado pela bobina principal do magneto. O receptor recebe o sinal
FID e envia o sinal para o sistema de aquisição, que codifica o sinal para depois ser analisado no
software.
A fonte de alimentação é responsável por gerar e controlar a corrente que alimenta o magneto, para a
produção do campo magnético �⃗� 0. Recebe vários parâmetros do software para poder gerar uma
corrente com as especificações requeridas pela técnica e pela amostra em estudo. O circuito da fonte
de alimentação vai ser processo de estudo no capítulo seguinte.
Fonte de Alimentação
Im2*
Im1
Im(t)
t(ms)
Im2
Im1*
Sina
l em
itid
o p
elo
si
stem
a de
co
man
do
Figura 2.6 – Evolução da corrente gerada pela fonte de alimentação.

17
O magneto é composto por um núcleo ferromagnético e bobinas que criam o campo magnético �⃗� 0. A
amostra é colocada no centro do entreferro de forma a ser submetida a um campo magnético �⃗� 0, com
a máxima homogeneidade possível
2.4 Magneto
O magneto utilizado foi desenvolvido por investigadores do Instituto Superior Técnico. Este tem vindo
a sofrer bastantes alterações para melhorar o desempenho eléctrico e a uniformidade do campo
magnético. Para esta dissertação foi considerada a ultima versão do magneto presente na Figura 2.7.
Figura 2.7 – Representação tridimensional do magneto em estudo [Roque, 2014b].
Este magneto é constituído por um núcleo ferromagnético maciço e por duas bobinas de cobre na perna
central. A perna central possui um entreferro de ar onde é colocada a amostra a analisar. O entreferro
não é uniforme, pois este foi dimensionado para que o campo magnético fosse o mais homogéneo
possível, ou seja, o efeito de franja fosse muito reduzido. As duas bobinas representadas na Figura 2.7
estão ligadas em serie, possuem 320 espiras cada uma e são percorridos por uma corrente 𝐼𝑚.
O campo magnético no entreferro pode ser obtido por aplicação da Lei de Ampere no caminho s,
Figura 2.8.
18
H0lef
s
ns
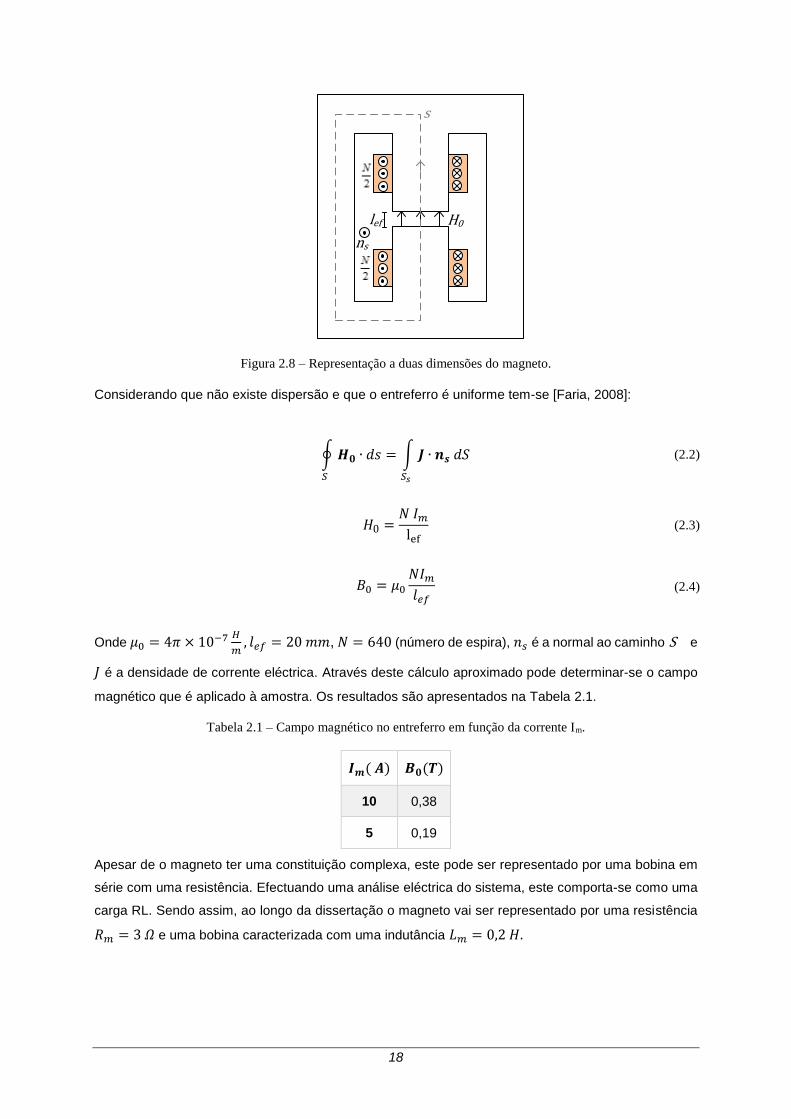
Figura 2.8 – Representação a duas dimensões do magneto.
Considerando que não existe dispersão e que o entreferro é uniforme tem-se [Faria, 2008]:
∮ 𝑯𝟎 ∙ 𝑑𝑠
𝑆
= ∫ 𝑱 ∙ 𝒏𝒔 𝑑𝑆
𝑆𝑠
(2.2)
𝐻0 =𝑁 𝐼𝑚lef
(2.3)
𝐵0 = 𝜇0𝑁𝐼𝑚𝑙𝑒𝑓
(2.4)
Onde 𝜇0 = 4𝜋 × 10−7 𝐻
𝑚, 𝑙𝑒𝑓 = 20 𝑚𝑚, 𝑁 = 640 (número de espira), 𝑛𝑠 é a normal ao caminho S e
𝐽 é a densidade de corrente eléctrica. Através deste cálculo aproximado pode determinar-se o campo
magnético que é aplicado à amostra. Os resultados são apresentados na Tabela 2.1.
Tabela 2.1 – Campo magnético no entreferro em função da corrente Im.
𝑰𝒎( 𝑨) 𝑩𝟎(𝑻)
10 0,38
5 0,19
Apesar de o magneto ter uma constituição complexa, este pode ser representado por uma bobina em
série com uma resistência. Efectuando uma análise eléctrica do sistema, este comporta-se como uma
carga RL. Sendo assim, ao longo da dissertação o magneto vai ser representado por uma resistência
𝑅𝑚 = 3 𝛺 e uma bobina caracterizada com uma indutância 𝐿𝑚 = 0,2 𝐻.

Capítulo 3
Fonte de Alimentação
3. Fonte de Alimentação
A fonte de alimentação é responsável por gerar e controlar a corrente que alimenta o magneto, para
gerar o campo magnético �⃗� 0. Como tal, é essencial que esta permita cumprir todas as especificações
necessárias para a técnica de Ressonância Magnética Nuclear (RMN) de Campo Cíclico Rápido (CCR).
Pretende-se que a fonte de alimentação possibilite ajustar a duração e o nível de corrente em cada
momento da técnica de RMN-CCR.
Neste capítulo desenvolve-se o circuito eléctrico para a fonte de tensão de alimentação bem como o
sistema de controlo que garante estabilidade e rapidez de resposta do sistema. O sistema desenvolvido
é, depois, simulado através do software Matlab/Simulink. Também é efectuado um balanço de
potências fornecidas e dissipadas no circuito. Por último verificar-se a necessidade de dissipadores de
calor e efectua-se o dimensionamento dos mesmos.

20
3.1 Especificações para fonte de alimentação
O projecto de uma fonte de alimentação para um magneto de RMN-CCR inclui vários requisitos. Tendo
em conta que o campo magnético no entreferro do magneto varia linearmente com a corrente, tal como
obtido equação (2.4), a fonte de alimentação deve permitir variações rápidas na corrente, com o
objectivo de criar um campo magnético de valor ajustável e com variações rápidas entre diversas
intensidades de campo, tal como representado na Figura 3.1 [Roque, 2012].
Im2*
Im1
Im(t)
t(ms)
Im2
Im1*
Figura 3.1 – Forma de onda típica para alimentar o magneto.
A forma de onda representada é uma forma de onda genérica, diferente da representada na Figura 2.2,
sendo todos os valores de correntes e tempos ajustáveis. A corrente máxima suportada pela fonte é
10 𝐴. Os tempos de subida e descida são da ordem dos 3 a 6 milissegundos.
3.2 Circuito eléctrico da fonte de alimentação
Para realizar a topologia da fonte de alimentação, foram estudadas configurações simples de
conversores CC/CC e foram acrescentados novos elementos, para obter melhores eficiências e
respostas mais rápidas do circuito.
3.2.1 Conversor CC/CC
O conversor CC/CC do tipo redutor com filtro indutivo, também designado conversor série de um
quadrante, enquadra-se na solução pretendida, pois o magneto pode ser analisado como um filtro
indutivo em série com uma resistência.

21
Este conversor permite ajustar a tensão média de saída, para valores mais baixos que a tensão de
entrada, em função do ângulo de disparo do semicondutor. Fazendo variar o ângulo de disparo faz-se
varia a tensão média de saída e como consequência varia-se a corrente no magneto.
O esquema do conversor redutor está representado na Figura 3.2. O conversor é constituído por uma
fonte de tensão contínua (𝑉), um semicondutor totalmente comandado (𝑆), o magneto representado
por uma bobina (𝐿𝑚) e uma resistência (𝑅𝑚) e um díodo de roda livre (𝐷𝑅𝐿), que permite a continuidade
da corrente após o fecho do semicondutor.
DRL
S
V
Rm
Lm
Mag
ne
to
VS
VmVD
Im
Figura 3.2 – Esquema do conversor redutor.
Supondo que o semicondutor conduz no início de cada período, e é colocado ao corte em 𝑡 = 𝑡𝑐 até
ao final do período, a corrente cresce a partir de zero de acordo com a equação (assumindo 𝑉𝑆 ≈ 0 𝑉):
𝑉 = 𝐿𝑚𝑑 𝐼𝑚𝑑𝑡
+ 𝑅𝑚 𝐼𝑚 (3.1)
Resolvendo a equação e considerando que no momento inicial não existe corrente no
magneto 𝑖𝑚(𝑡 = 0) = 0 𝐴, tem-se:
0 < 𝑡 < 𝑡𝑐 → 𝐼𝑚 =𝑉
𝑅𝑚 (1 − 𝑒
−𝑅𝑚𝐿𝑚
𝑡) (3.2)
Colocando o semicondutor ao corte em 𝑡 = 𝑡𝑐, a corrente proveniente da fonte de tensão é cortada,
passando o díodo de roda livre à condução. Esta passagem à condução do díodo acontece de forma
natural pois este fica directamente polarizado como consequência da energia magnética armazenada
na bobina. Desta forma a equação que caracteriza a evolução da corrente altera-se passando a ser
dada por (considerando queda tensão no díodo em condução nula, 𝑉𝐷 ≈ 0 𝑉):
0 = 𝐿𝑚𝑑 𝐼𝑚𝑑𝑡
+ 𝑅𝑚 𝐼𝑚 (3.3)
Tendo em conta que a corrente inicial (corrente no momento da passagem ao corte) é dada por:
𝐼𝑚(𝑡 = 𝑡𝑐) =𝑉
𝑅𝑚 (1 − 𝑒
−𝑅𝑚𝐿𝑚
𝑡𝑐) = 𝐼𝑡𝑐 (3.4)
22
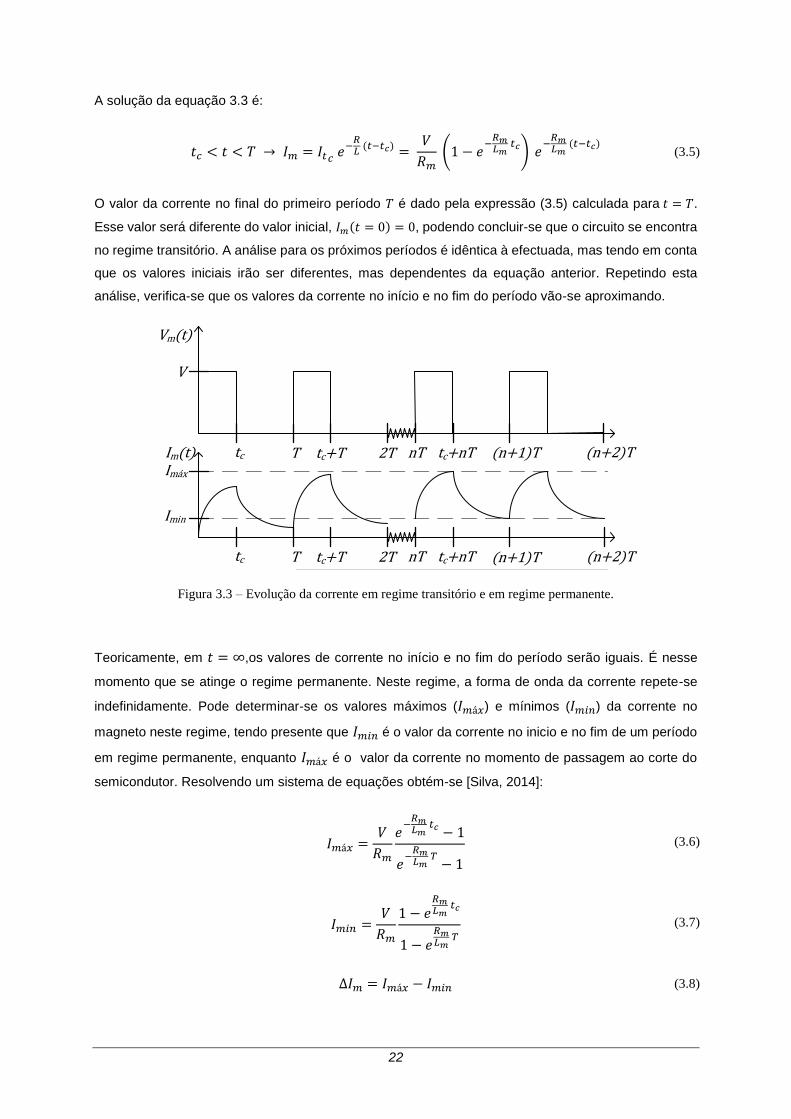
A solução da equação 3.3 é:
𝑡𝑐 < 𝑡 < 𝑇 → 𝐼𝑚 = 𝐼𝑡𝑐 𝑒−𝑅𝐿 (𝑡−𝑡𝑐) =
𝑉
𝑅𝑚 (1 − 𝑒
−𝑅𝑚𝐿𝑚
𝑡𝑐) 𝑒
−𝑅𝑚𝐿𝑚
(𝑡−𝑡𝑐) (3.5)
O valor da corrente no final do primeiro período 𝑇 é dado pela expressão (3.5) calculada para 𝑡 = 𝑇.
Esse valor será diferente do valor inicial, 𝐼𝑚(𝑡 = 0) = 0, podendo concluir-se que o circuito se encontra
no regime transitório. A análise para os próximos períodos é idêntica à efectuada, mas tendo em conta
que os valores iniciais irão ser diferentes, mas dependentes da equação anterior. Repetindo esta
análise, verifica-se que os valores da corrente no início e no fim do período vão-se aproximando.
Vm(t)
Im(t)
Ttc 2Ttc+T nT tc+nT
Ttc 2Ttc+T nT tc+nT (n+1)T
V
Imáx
Imin
(n+1)T
(n+2)T
(n+2)T
Figura 3.3 – Evolução da corrente em regime transitório e em regime permanente.
Teoricamente, em 𝑡 = ∞,os valores de corrente no início e no fim do período serão iguais. É nesse
momento que se atinge o regime permanente. Neste regime, a forma de onda da corrente repete-se
indefinidamente. Pode determinar-se os valores máximos (𝐼𝑚á𝑥) e mínimos (𝐼𝑚𝑖𝑛) da corrente no
magneto neste regime, tendo presente que 𝐼𝑚𝑖𝑛 é o valor da corrente no inicio e no fim de um período
em regime permanente, enquanto 𝐼𝑚á𝑥 é o valor da corrente no momento de passagem ao corte do
semicondutor. Resolvendo um sistema de equações obtém-se [Silva, 2014]:
𝐼𝑚á𝑥 =𝑉
𝑅𝑚
𝑒−𝑅𝑚𝐿𝑚
𝑡𝑐 − 1
𝑒−𝑅𝑚𝐿𝑚
𝑇− 1
(3.6)
𝐼𝑚𝑖𝑛 =𝑉
𝑅𝑚
1 − 𝑒𝑅𝑚𝐿𝑚
𝑡𝑐
1 − 𝑒𝑅𝑚𝐿𝑚
𝑇 (3.7)
∆𝐼𝑚 = 𝐼𝑚á𝑥 − 𝐼𝑚𝑖𝑛 (3.8)
23
Para a solução, pretende-se que os valores 𝐼𝑚á𝑥 e 𝐼𝑚𝑖𝑛 sejam muito próximos, para garantir que a
corrente é aproximadamente constante (∆𝐼𝑚 ≈ 0), formando um campo magnético praticamente
estacionário.
Para regular a intensidade do campo magnético interessa considerar o valor médio da corrente:
𝐼𝑚𝑚é𝑑= 𝑉
𝑅𝑚 𝑡𝑐𝑇= 𝑉
𝑅𝑚 𝛿 (3.9)
Sendo 𝛿 o factor de ciclo, ou seja a fracção de tempo em que o semicondutor 𝑆 está à condução, face
ao período 𝑇.
Da análise das equações (3.8) e (3.9) pode verificar-se que o valor médio da corrente só depende do
factor de ciclo, não dependendo directamente do período 𝑇, mas a variação da corrente depende da
frequência de comutação do semicondutor. Ou seja, a variação de corrente aumenta, quando se
aumentado o período. Por isso convém ter um período pequeno, mas que seja suportado pelo
semicondutor.
O objectivo da fonte de alimentação é controlar a corrente, por isso efectuou-se um sistema de controlo
de corrente que comanda a abertura e o fecho do semicondutor em função da corrente pretendida no
magneto. Este sistema será estudado na secção 3.3.
3.2.2 Circuito para transição ascendente e descendente
Quando existe uma grande variação no valor de referência da corrente, o semicondutor é colocado em
condução ou ao corte, durante um intervalo de tempo que permita ao circuito atingir o novo valor de
corrente. Este intervalo de tempo pode ser estimado.
Na situação em que a corrente tem um valor baixo e se pretende uma corrente elevada, esse tempo
pode ser determinado a partir da expressão (3.2), obtendo-se:
𝑡 =𝐿𝑚𝑅𝑚
ln (−𝑉
𝑅𝑚 𝐼𝑚 − 𝑉) (3.10)
Fazendo um estudo para a pior situação possível, ou seja, imaginando que se quer transitar entre
corrente nula, para uma corrente 𝐼𝑚 = 10 𝐴 e que a tensão de entrada é 𝑉 = 50 𝑉, tem-se um tempo
estimado de resposta de 𝑡 = 61 𝑚𝑠. Este tempo é muito superior ao exigido para a técnica de RMN-
CCR. Uma forma de contornar este problema sem ter que alterar as características do magneto, passa
por aumentar o valor da fonte de tensão 𝑉. Ao aumentar a capacidade da fonte, conseguem-se resposta
mais rápidas. No caso de se utilizar uma fonte com 𝑉 = 400 𝑉, o circuito levaria cerca de 𝑡 = 5 𝑚𝑠 a
atingir uma corrente 𝐼𝑚 = 10 𝐴. Este valor vai de encontro ao pretendido para a fonte.
Numa situação em que a referência de corrente não sofre grandes variações, não é necessário uma
fonte de tensão muito elevada. Por isso a solução será activar a fonte de tensão elevada (auxiliar)

24
apenas quando existem grandes variações, aumentando a eficiência da fonte de alimentação. Então,
será acrescentado um novo semicondutor (𝑆𝑎𝑢𝑥) que activa e desactiva a fonte de tensão auxiliar (𝑉𝑎𝑢𝑥)
quando existe uma grande variação da corrente de referencia. Quando se está perante uma transição
ascendente verifica-se a situação representada na Figura 3.4
Rm
LmSaux
Vaux
Im
Figura 3.4 – Circuito para transição ascendente.
Para a situação contrária, ou seja, quando se pretende baixar o valor da corrente, os semicondutores
(S e Saux) passam ao corte, passando a corrente a circular pelo díodo de roda livre (DRL). Os dois
semicondutores nunca se encontram em condução em simultâneo, mas podem estar ambos ao corte.
Recorrendo a equação (3.5), pode estimar-se o tempo que levaria a corrente a atingir um valor de
corrente inferior.
𝑡 =𝐿𝑚𝑅𝑚
ln (𝐼𝑡𝑐𝐼𝑚) (3.11)
Na equação anterior, 𝐼𝑡𝑐 representa a corrente no momento em que o semicondutor é colocado ao
corte, e 𝐼𝑚 representa o novo valor de corrente que se pretende atingir. Para uma situação em que
𝐼𝑡𝑐 = 10 𝐴, o circuito demora 154 segundos a atingir 𝐼𝑚 = 1 𝐴. Tal como visto para o flanco
ascendente da corrente, a transição é demasiado lenta de acordo com o que é exigido pela técnica de
RMN-CCR. Para aumentar velocidade de resposta do circuito, introduziu-se um condensador em série
com o díodo de roda livre. Este condensador permite absorver parte da energia armazenada na bobina
de forma rápida. Assim, podem calcular-se as energias postas em jogo no circuito para conseguir
dimensionar o condensador a inserir no circuito. Então as energias na bobina e no condensador são
dadas por:
𝑊𝐿 =1
2𝐿𝑚 𝐼𝑚
2 (3.12)
𝑊𝐶 =1
2 𝐶 ∆𝑣𝐶
2 (3.13)

25
Considerando a corrente máxima no magneto (𝐼𝑚 = 10 𝐴), a energia armazenada na bobina no
momento de passagem ao corte do semicondutor é 𝑊𝐿 = 10 𝐽.
O circuito a considerar no momento de passagem ao corte está representado na Figura 3.5.
Rm
Lm
DRL
C
Im
VD
VC
Figura 3.5 – Circuito equivalente com os semicondutores ao corte.
Desprezando a queda de tensão do díodo em condução (𝑉𝐷 ≈ 0 𝑉), a equação que rege o circuito
passa a ser dada por:
𝐿𝑚𝑑 𝐼𝑚(𝑡)
𝑑𝑡+ 𝑅𝑚 𝐼𝑚(𝑡) + 𝑉𝐶 = 0 (3.14)
Ao ser considerado um regime de pequenas perturbações, a equação pode ser reescrita ficando:
∆𝑣𝐶 = −𝐿𝑚∆𝑖𝑚∆𝑡
− 𝑅𝑚 ∆𝑖𝑚 (3.15)
Ao se considerar ∆𝑖𝑚 = −10𝐴 e ∆𝑡 = 6 𝑚𝑠, obtém-se uma variação da tensão aos terminais do
condensador de ∆𝑣𝐶 = 363V.
O condensador deve ser dimensionado em função da energia que deve armazenar. Através da
expressão (3.13), é possível fazer esse dimensionamento. Para que o condensador possa receber
100 % da energia armazenada na bobina, tem-se:
𝐶 = 𝑊𝐿
2
∆𝑣𝐶2 =
2 𝑊𝐿
∆𝑣𝐶2 = 151.5 μ𝐹 (3.16)
Para que o condensador possa receber 50 % da energia armazenada na bobina obtém-se:
𝐶 =1
2𝑊𝐿
2
∆𝑣𝐶2 =
𝑊𝐿
∆𝑣𝐶2 = 75.8 μ𝐹 (3.17)
Apesar de este cálculo não nos garantir uma solução óptima, permite obter uma gama de valores para
a capacidade que o condensador deve possuir. Mais tarde este valor pode ser ajustado através de
simulação. É necessário ter em conta que quanto maior for o condensador, maior é a constante de
tempo (𝜏𝑅𝐶 = 𝑅 𝐶), logo mais lenta é a resposta às variações. Por outro lado, quanto mais pequeno for

26
o condensador, maior é a componente complexa dos polos do sistema, logo a resposta é mais
oscilatória.
Para os cálculos anteriores, é considerado que o condensador não tem nenhuma energia armazenada.
Mas isso só verifica a primeira vez que o díodo de roda livre passa à condução. A segunda vez que o
díodo de roda livre passa a condução, o condensador já tem energia armazenada, assim sendo, a
capacidade do condensador armazenar a energia proveniente da bobina vai ser reduzida. A solução
encontrada passa por colocar uma resistência em paralelo com o condensador, que permita
descarrega-lo sempre que o díodo de roda livre está ao corte.
S
V
C RC
DRL
Rm
LmSaux
Vaux
Im
Figura 3.6 – Circuito final da fonte de tensão.
Na Figura 3.6 está representado o circuito com a resistência em paralelo com o condensador. A
impedância da resistência 𝑅𝐶 tem que ser muito maior que a impedância do condensador, caso
contrário não pode ser desprezada, ficando a resposta do sistema diferente. O valor para a resistência
não é facilmente obtido analiticamente, por isso, foi obtido um valor por simulação de modo a que o
tempo de subida e descida da corrente seja idêntico. Obteve-se um valor aceitável para 𝑅𝐶 = 380 𝛺,
considerando 𝐶 = 142 𝜇𝐹.
3.2.3 Ajustes para implementação do circuito
Para implementar o circuito desenvolvido nas secções anteriores é necessário escolher o tipo de
semicondutores a implementar, e definir os valores das fontes de tensão. A fonte de tensão 𝑉, que
funciona em regime permanente, deve ter a capacidade de fornecer uma corrente média no magneto
de 𝐼𝑚 = 10 𝐴. Através da expressão (3.9), consegue-se verificar que uma fonte de tensão 𝑉 = 30 𝑉,
permitia obter essa corrente. Contudo a expressão despreza as quedas de tensão nos semicondutores,
por isso, esse valor muito dificilmente seria atingido na realidade. A escolha do valor de tensão deve
ser feito tendo em conta que 30 𝑉 é o valor mínimo a considerar. A fonte de tensão auxiliar deve ser
escolhida com base no tempo de subida desejado para impor na técnica de RMN-CCR.
A construção/ obtenção das fontes de tensão não é abordada nesta dissertação, mas considera-se que
as fontes de tensão conseguem manter o valor de tensão sempre constante e possuem pouca distorção

27
harmónica. Para efeitos de simulação optou por se considerar uma fonte de tensão de 𝑉 = 50 𝑉, e
uma fonte de tensão auxiliar de 𝑉𝑎𝑢𝑥 = 400 𝑉.
Os semicondutores devem suportar tensões na ordem dos 400 𝑉 (depende das fontes de tensão) e
correntes na ordem dos 10 𝐴. Devem ser fáceis de controlar e possuir tempos de comutação pequenos.
De preferência os semicondutores devem ter baixas quedas de tensão quando em condução. Estas
características são suportadas por dois tipos de semicondutores: o transístor de efeito de campo de
porta isolada (“Metal Oxide Semicondutor Field Effect Transistor”, MOSFET) e o transístor bipolar de
porta isolada (“Insulated Gate Bipolar Transistor”, IGBT). Para a simulação optou-se por utilizar o IGBT
(Catálogo em Anexo), pois este possui uma menor queda de tensão em condução. Contudo, grande
parte dos IGBTs comercializados possui um díodo em antiparalelo. No circuito descrito anteriormente,
a colocação de um díodo em antiparalelo com o semicondutor pode significar fazer um curto-circuito a
uma fonte. Por isso é necessário acrescentar dois novos díodos em série com o semicondutor para
evitar que tal aconteça.
D
S
V
C RC
DRL
Rm
LmDaux
Saux
Vaux
Im
Figura 3.7 – Circuito da fonte de alimentação e magneto a simular.
3.3 Sistema de controlo de Corrente
Para satisfazer os requisitos de corrente necessários à criação do campo magnético no interior do
entreferro, irá implementar-se um sistema de controlo de corrente ao conversor. O sistema de controlo
irá regular o disparo do semicondutor, de modo a que a corrente no magneto seja igual à referência.
Para simplificar, começou-se por estudar um sistema de controlo para o conversor mais simples. E
considerou-se um semicondutor ideal, ou seja, comporta-se como interruptor. Quando a tensão
aplicada na gate do semicondutor for maior ou igual a 1 𝑉 o semicondutor entra em condução, caso
contrário o semicondutor está ao corte.

28
DRL
S
V
Rm
Lm
Magn
eto
Im
IRefRegulador +-
Figura 3.8 – Esquema do conversor com sistema de controlo.
A escolha do regulador tem de ser feita tendo em conta o sistema que vai compensar. Por isso, é
importante modelizar o circuito antes de escolher o regulador. Para isso pode determinar-se as funções
de transferência do semicondutor e da carga (magneto). Depois procede-se a construção de um
diagrama de blocos do sistema, para finalmente escolher um regulador adequado.
No tipo de controlo que se pretende implementar, não existe uma frequência de comutação previamente
estabelecida. Assim o semicondutor passa a condução sempre que a saída do regulador atinja o valor
de tensão necessário ao disparo do semicondutor. Isso verifica-se quando a corrente medida no
magneto é inferior à referência. Assim que a corrente medida passa o valor de referência, o regulador
irá produzir uma tensão que leva o semicondutor ao corte.
O conversor pode ser visto como um amplificador de ganho 𝐾, que depende da fonte de entrada, do
conversor, da carga e do ponto de funcionamento. Em alguns casos pode considerar-se um polo
dominante, que representa um atraso nas comutações. Neste conversor os períodos de comutação
estão directamente relacionados com a constante de tempo da carga (magneto), por isso o atraso de
comutação pode ser desprezado. No entanto pode considerar-se um atraso (𝑇𝑎) provocado por falhas
do sistema de comando e atrasos na leitura da corrente na ordem dos 0.1 𝑚𝑠.
S
V Vm
uc Vm
Figura 3.9 – Modelo equivalente do conversor.
O ganho 𝐾 da função de transferência pode ser estimado, tendo em conta a variação da tensão 𝑢𝑐
fornecida pelo compensador e a tensão 𝑉𝑚 aplicada a carga. Uma vez que a tensão que leva o
semicondutor à condução é 1 𝑉, limitou-se a tensão 𝑢𝑐 entre 0,95𝑉 ≤ 𝑢𝑐 ≤ 1,05 de modo a permitir
pequenas variações em torno de 1 𝑉. Como a fonte de tensão utilizada em regime permanente é 50 𝑉,

29
tem-se:
𝐾 =∆𝑉𝑚∆𝑢𝑐
=50 − 0
1.05 − 0.95= 500 (3.18)
Para obter o modelo do magneto é necessário recorrer ao circuito da Figura 3.10. Por aplicação da lei
de Kirchhoff, tem-se:
𝐿𝑑 𝐼𝑚(𝑡)
𝑑𝑡+ 𝑅𝐼𝑚(𝑡) = 𝑉𝑚 (3.19)
Efectuando a transformação de Laplace:
𝐿 𝐼𝑚(𝑠) ∙ 𝑠 + 𝑅 𝐼𝑚(𝑠) = 𝑉𝑚 (3.20)
𝐼𝑚(𝑠) =
𝑉𝑚(𝑠)
𝐿𝑚 𝑠 + 𝑅𝑚=
𝑉𝑚(𝑠)
𝑅𝑚 (1 + 𝑠𝐿𝑚𝑅𝑚)
(3.21)
𝐼𝑚(𝑠)
𝑉𝑚(𝑠)=
1
𝑅𝑚 (1 + 𝑠𝐿𝑚𝑅𝑚)
(3.22)
Esta função de transferência representa a carga quando o sistema se encontra em regime permanente,
com o semicondutor em condução.
Rm
Lm
Magnet o
Vm
Im
ImVm
Figura 3.10 – Modelo equivalente do magneto.
O diagrama de blocos do sistema está representado na Figura 3.11, inclui o compensador 𝐶(𝑠), o bloco
que representa a fonte de tensão e o semicondutor e o bloco que representa o magneto.
-
+
Figura 3.11 – Diagrama de blocos do sistema.

30
Ao seleccionar-se o compensador é necessário ter em conta que o sistema em cadeia aberta tem um
pólo real em −𝑅𝑚 𝐿𝑚⁄ , um polo real em −𝑇𝑎 e não possui qualquer polo na origem. Um compensador
só com ganho proporcional não conseguiria erros estáticos nulos. Um compensador com acção integral
garante um erro estático nulo, mas origina um sistema lento. Um compensador com acção derivativa
poderá fazer com que a hipótese de desprezar os pólos de alta frequência não seja válida.
Então opta-se por um compensador do tipo Proporcional-Integral, que assegura uma dinâmica de 2ª
ordem e garante maior rapidez na resposta para alem de permitir obter erros estáticos nulos. O
compensador possui uma função de transferência do tipo [Roque, 2014c]:
𝐶(𝑠) =𝑢𝑐(𝑠)
𝐼𝑚𝑟𝑒𝑓(𝑠) − 𝐼𝑚(𝑠)
=1 + 𝑠 𝑇𝑧𝑠 𝑇𝑝
= 𝐾𝑃 +𝐾𝐼𝑠
(3.23)
Para determinar os ganhos do compensador (𝐾𝑃 e 𝐾𝐼) é utlizada a técnica de Modulos Optimum, que
cancela o polo dominante da carga, com um zero no compensador. Ao fazer este processo elimina-se
a constante de tempo 𝐿𝑚/𝑅𝑚 que é geralmente bem maior que o atraso 𝑇𝑎. Permitindo maximizar a
largura de banda do sistema e minimizar os tempos de resposta [Silva, 2013].
𝑇𝑍 =𝐿𝑚𝑅𝑚
(3.24)
O sistema simplifica-se dando a origem ao sistema seguinte.
-
+
Figura 3.12 – Diagrama de blocos completo do sistema.
O erro entre a corrente de referência e a corrente medida no magneto é dada por:
𝐸(𝑠) = 𝐼𝑚𝑟𝑒𝑓(𝑠)− 𝐼𝑚(𝑠) = 𝐼𝑚𝑟𝑒𝑓(𝑠)−1
𝑠 𝑇𝑝
𝐾
1 + 𝑠 𝑇𝑎
1
𝑅𝑚 𝐸(𝑠) (3.25)
Desenvolvendo:
𝐸(𝑠) = 𝐼𝑚𝑟𝑒𝑓(𝑠) −
1
𝑠 𝑇𝑝
𝐾
1 + 𝑠 𝑇𝑎
1
𝑅𝑚 𝐸(𝑠) (3.26)
𝐸(𝑠) = 𝐼𝑚𝑟𝑒𝑓(𝑠)
1
1 +1𝑠 𝑇𝑝
𝐾1 + 𝑠 𝑇𝑎
1𝑅𝑚
= 𝐼𝑚𝑟𝑒𝑓(𝑠)𝑠 𝑇𝑝(1 + 𝑠 𝑇𝑎)𝑅𝑚
𝑠 𝑇𝑝(1 + 𝑠 𝑇𝑎)𝑅𝑚 + 𝐾
(3.27)
31
Pelo teorema do valor final, considerando que a referência é um escalão (𝐼𝑚𝑟𝑒𝑓(𝑠) = 1/𝑠) verifica-se
que o erro estático é nulo, cumprindo com o objectivo do controlador.
lim 𝑠→0
𝑠 𝐸(𝑠) = lim 𝑠→0
𝑠 𝑇𝑝(1 + 𝑠 𝑇𝑎)𝑅𝑚𝑠 𝑇𝑝(1 + 𝑠 𝑇𝑎)𝑅𝑚 + 𝐾
=0
𝐾= 0 (3.28)
A função de transferência em cadeia fechada é:
𝐼𝑚(𝑠)
𝐼𝑚𝑟𝑒𝑓(𝑠)=
1𝑠 𝑇𝑝
𝐾1 + 𝑠 𝑇𝑎
1𝑅𝑚
1 +1𝑠 𝑇𝑝
𝐾1 + 𝑠 𝑇𝑎
1𝑅𝑚
=𝐾
𝑠 𝑇𝑝(1 + 𝑠 𝑇𝑎)𝑅𝑚 + 𝐾 (3.29)
Fazendo mais algumas manipulações para colocar a função de transferência na forma canónica de um
sistema de 2ª ordem, tem-se:
𝐼𝑚(𝑠)
𝐼𝑚𝑟𝑒𝑓(𝑠)=
1
𝑠2𝑇𝑎𝑇𝑝𝑅𝑚𝐾
+ 𝑠𝑇𝑝𝑅𝑚𝐾
+ 1
=
𝐾𝑇𝑎𝑇𝑝𝑅𝑚
𝑠2 + 𝑠1𝑇𝑎+
𝐾𝑇𝑎𝑇𝑝𝑅𝑚
(3.30)
Comparando a equação obtida com a equação canónica de um sistema de 2ª ordem, é possível obter
o valor de 𝑇𝑝, o que permite calcular os parâmetros do compensador. A equação canónica é dada por
[Silva, 2013], [Ogata, 2010]:
𝐹(𝑠) =𝜔𝑛2
𝑠2 + 2𝜁𝜔𝑛𝑠 + 𝜔𝑛2 (3.31)
Igualando os coeficientes da função canónica com a função de transferência em cadeia fechada,
tem-se:
{
𝜔𝑛
2 =𝐾
𝑇𝑎𝑇𝑝𝑅𝑚
2𝜁𝜔𝑛 =1
𝑇𝑎
(3.32)
Elevando ao quadrado a segunda equação do sistema obtém-se:
𝑇𝑝 =4 𝜁2𝐾 𝑇𝑎𝑅𝑚
(3.33)
Seguindo o critério ITAE, utiliza-se um coeficiente de amortecimento de 𝜁 = √2/2 , que corresponde
ao melhor compromisso entre velocidade de resposta e sobreelevação [Silva, 2013], [Ogata, 2010].

32
Finalmente, estimam-se os ganhos proporcional e integral do compensador:
𝐾𝐼 =1
𝑇𝑝=
𝑅𝑚4 𝜁2𝐾 𝑇𝑎
= 30 (3.34)
𝐾𝑃 =𝑇𝑧𝑇𝑝=
𝐿𝑚
4 𝜁2𝐾 𝑇𝑎= 2 (3.35)
De notar que os ganhos dependem directamente do valor de 𝑇𝑎, e como este valor não é mensurável
sem serem efectuados testes, é provável que os ganhos tenham de ser ajustados, se este valor de 𝑇𝑎
se alterar. No entanto prevê-se que a ordem de grandeza destas unidades esteja correcta.
Para o estudo efectuado para o sistema de controlo de corrente não foram consideradas as alterações
introduzidas ao circuito, pois é mais importante garantir que em regime permanente o erro é pequeno
do que ter um grande controlo na subida da corrente. No entanto o mesmo controlador que controla o
sistema em regime permanente, também controla a corrente durante as transições entre níveis.
3.4 Simulação do circuito da fonte de alimentação
O circuito desenvolvido para a fonte de alimentação e o respectivo sistema de controlo foi simulado em
Matlab-Simulink.
Mag
ne
to
+-
+
-
+
+
+ -
Selector
Limitador
Integrador
Controlador PI
Figura 3.13 – Sistema completo da fonte de alimentação do espectrómetro RMN-CCR.
Um sistema equivalente ao da Figura 3.13, foi implementado para efeito de simulação. Este sistema
inclui o circuito eléctrico desenvolvido na secção 3.2, o sistema de controlo desenvolvido na secção 3.3
e um bloco de comando (“Selector”), cujo objectivo é alternar entre a fonte de tensão formal (𝑉 = 50 𝑉),

33
e a fonte de tensão auxiliar (𝑉𝑎𝑢𝑥 = 400 𝑉).
O sistema recebe o sinal para a corrente de referência definido pelo utilizador. A corrente de referência
(𝐼𝑚𝑟𝑒𝑓) é comparada com a corrente medida no magneto (𝐼𝑚). A diferença entre as correntes é
considerado o erro de corrente, este erro é compensado por um controlador PI.
O controlador possui três ganhos, dois deles (𝐾𝐼 e 𝐾𝑃) já foram calculados teoricamente, no entanto
através da simulação verificou-se que os valores calculados não eram os mais correctos. Então fez-se
uma análise através da simulação para vários valores de 𝐾𝐼 e 𝐾𝑃. Nas várias simulações observou-se
a amplitude das oscilações que o sistema apresenta em torno de valores fixos de corrente, neste caso
foram consideradas oscilações em torno de correntes de 2 𝐴 , 4 𝐴 𝑒 10 𝐴. Os resultados são
apresentados na Tabela 3.1, de notar que os valores para as variações observadas são máximos. A
variação da resposta é maior quando o sistema atinge um determinado valor de corrente, depois tende
a diminuir um pouco. Com esta análise verificou-se que os ganhos mais adequados ao sistema são
𝐾𝐼 = 15 e 𝐾𝑃 = 1. O controlador possui à saída um limitador, que tem o tem o objectivo de limitar a
saída do controlador em função das limitações do circuito eléctrico. O valor do limitador é ajustável e
influencia as constantes de tempo 𝐾𝐼 e 𝐾𝑃. Neste caso considerou-se que a tensão 𝑢𝐶 (á saída do
controlador) está limitada entre 0.95 𝑒 1.05 (tensão que coloca o semicondutor em condução é 1 𝑉. A
diferença entre o sinal antes e após o limitador é enviado ao bloco integrador, para que esta diferença
seja compensada. O ganho 𝐾𝑊 determina o impacto que terá esta compensação, neste caso foi
considerado um ganho unitário.
Tabela 3.1 – Influencia dos ganhos do controlador PI na resposta do sistema.
𝑰𝒎 = 𝟏𝟎 𝑨 𝑰𝒎 = 𝟒 𝑨 𝑰𝒎 = 𝟐 𝑨
𝑲𝑷 𝑲𝑰 ∆𝐼𝑚 (𝐴) ∆𝐼𝑚 (𝐴) ∆𝐼𝑚 (𝐴)
1.5
22.5 0,167 0,084 0,055
15 0,126 0,080 0,055
7.5 0,085 0,064 0,055
1
22.5 0,070 0,060 0,057
15 0,062 0,051 0,052
7.5 0,071 0,067 0,057
0.5
22.5 0,371 0,066 0,092
15 0,282 0,088 0,076
7.5 0,165 0,122 0,066
34
O bloco “Selector” recebe a tensão 𝑢𝐶 fornecida pelo controlador PI, o erro de corrente e a corrente de
referência. Este bloco é dotado de uma unidade de memória que permite detectar uma variação
ascendente brusca na corrente de referência. Assim que é detectada esta variação o semicondutor 𝑆
é coloca ao corte e o semicondutor auxiliar, 𝑆𝑎𝑢𝑥, é colocado em condução, ocorrendo esta transição
em simultâneo. Nesta transição não existe o risco de os dois semicondutores conduzirem em
simultâneo devido a atrasos no comando, pois assim que a fonte de tensão auxiliar (𝑉𝑎𝑢𝑥) é accionada,
o díodo 𝐷 fica inversamente polarizado, por isso interrompe a corrente proveniente da fonte de tensão
𝑉. Nesse momento o semicondutor 𝑆𝑎𝑢𝑥 passa a ser controlado pelo controlador PI. Assim que a
unidade de memória verifica que já foi atingido o regime permanente e a corrente do magneto atinge o
valor da corrente em regime permanente, é dada ordem de corte ao semicondutor auxiliar, 𝑆𝑎𝑢𝑥, e após
alguns microssegundos é emitida ordem de condução ao semicondutor 𝑆 (passa a ser controlado pelo
controlador PI). É necessário garantir um tempo entre a ordem de corte e a ordem de condução para
garantir que não o díodo 𝐷 não fica inversamente polarizado.
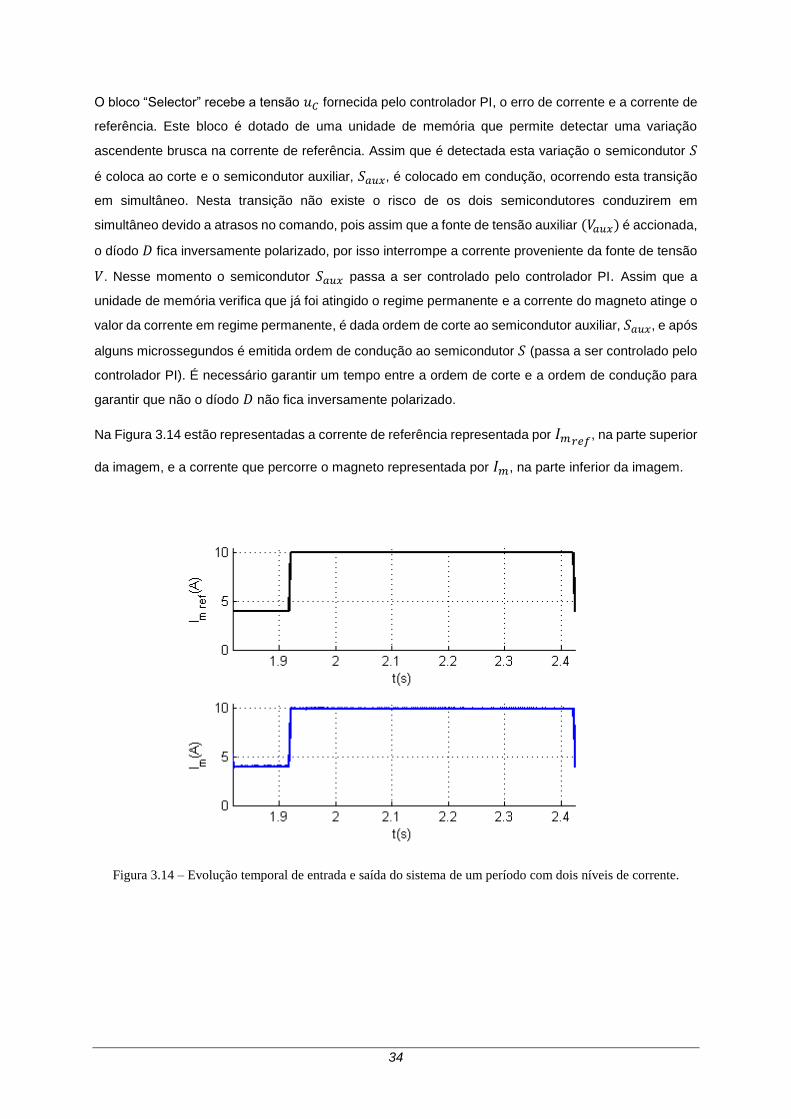
Na Figura 3.14 estão representadas a corrente de referência representada por 𝐼𝑚𝑟𝑒𝑓, na parte superior
da imagem, e a corrente que percorre o magneto representada por 𝐼𝑚, na parte inferior da imagem.
Figura 3.14 – Evolução temporal de entrada e saída do sistema de um período com dois níveis de corrente.

35
Para a simulação considerou-se que o campo magnético de evolução é criado com uma corrente de
4 𝐴, e que o campo de polarização e detecção é criado com uma corrente de 10 𝐴, e foram utilizados
os seguintes parâmetros:
𝑉𝑎𝑢𝑥 = 400 𝑉;
𝑉 = 50 𝑉;
𝐿𝑚 = 200 𝑚𝐻;
𝑅𝑚 = 3 Ω;
𝑅𝐶 = 280 Ω;
𝐶 = 142 𝜇𝐹;
𝐾𝐼 = 15;
𝐾𝑃 = 1;
𝐾𝑊 = 1.
Na primeira simulação, que corresponde às Figuras 3.14 e 3.15, a referência possui tempos de
transição de 𝑡𝑜𝑛 = 3 𝑚𝑠. Ou seja, o tempo que a corrente de referência leva a passar de 4 𝐴 para
10 𝐴 é 3 𝑚𝑠. Contudo, apesar de o semicondutor 𝑆𝑎𝑢𝑥, estar sempre em condução, pode observar-se
na Figura 3.15, que a corrente no magneto tem um pequeno atraso, ou seja demora cerca de 3,2 𝑚𝑠
a atingir os 10 𝐴. Apesar de este valor ser bastante satisfatório, conseguir-se-ia uma transição mais
rápida com uma fonte de tensão auxiliar de valor mais elevado. Com os parâmetros da simulação,
verifica-se um ganho máximo na transição ascendente de ≈ 1,9 𝐴/𝑚𝑠. Este ganho só se verifica com
o semicondutor auxiliar. Numa situação normal em que a fonte de tensão tem o valor de 50 𝑉 o ganho
máximo atingido é ≈ 0,12 𝐴/𝑚𝑠. O bloco “Selector”, consegue detectar se a transição na corrente de
referência tem um ganho superior ao atingido pela fonte de tensão normal, e caso o ganho da corrente
de referência seja maior, acciona a fonte de tensão auxiliar.
Figura 3.15 – Transição ascendente (𝑡𝑜𝑛 = 3 𝑚𝑠) da corrente no magneto.
36
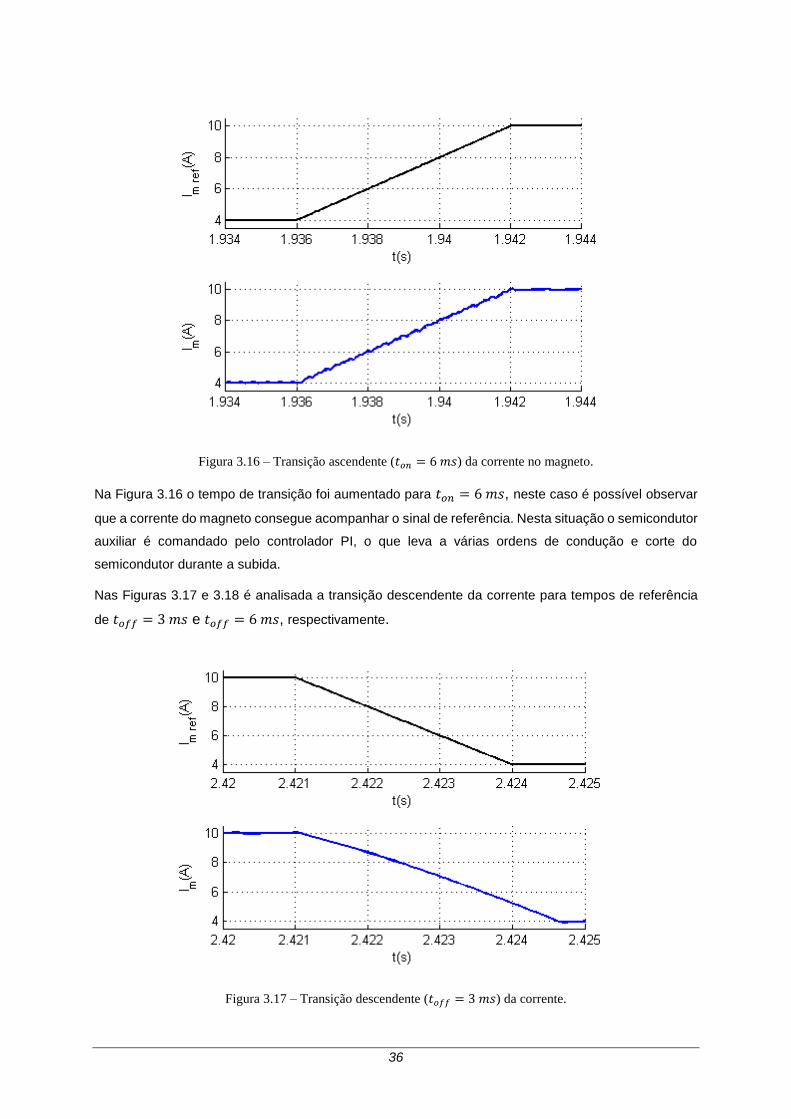
Figura 3.16 – Transição ascendente (𝑡𝑜𝑛 = 6 𝑚𝑠) da corrente no magneto.
Na Figura 3.16 o tempo de transição foi aumentado para 𝑡𝑜𝑛 = 6 𝑚𝑠, neste caso é possível observar
que a corrente do magneto consegue acompanhar o sinal de referência. Nesta situação o semicondutor
auxiliar é comandado pelo controlador PI, o que leva a várias ordens de condução e corte do
semicondutor durante a subida.
Nas Figuras 3.17 e 3.18 é analisada a transição descendente da corrente para tempos de referência
de 𝑡𝑜𝑓𝑓 = 3 𝑚𝑠 e 𝑡𝑜𝑓𝑓 = 6 𝑚𝑠, respectivamente.
Figura 3.17 – Transição descendente (𝑡𝑜𝑓𝑓 = 3 𝑚𝑠) da corrente.
37
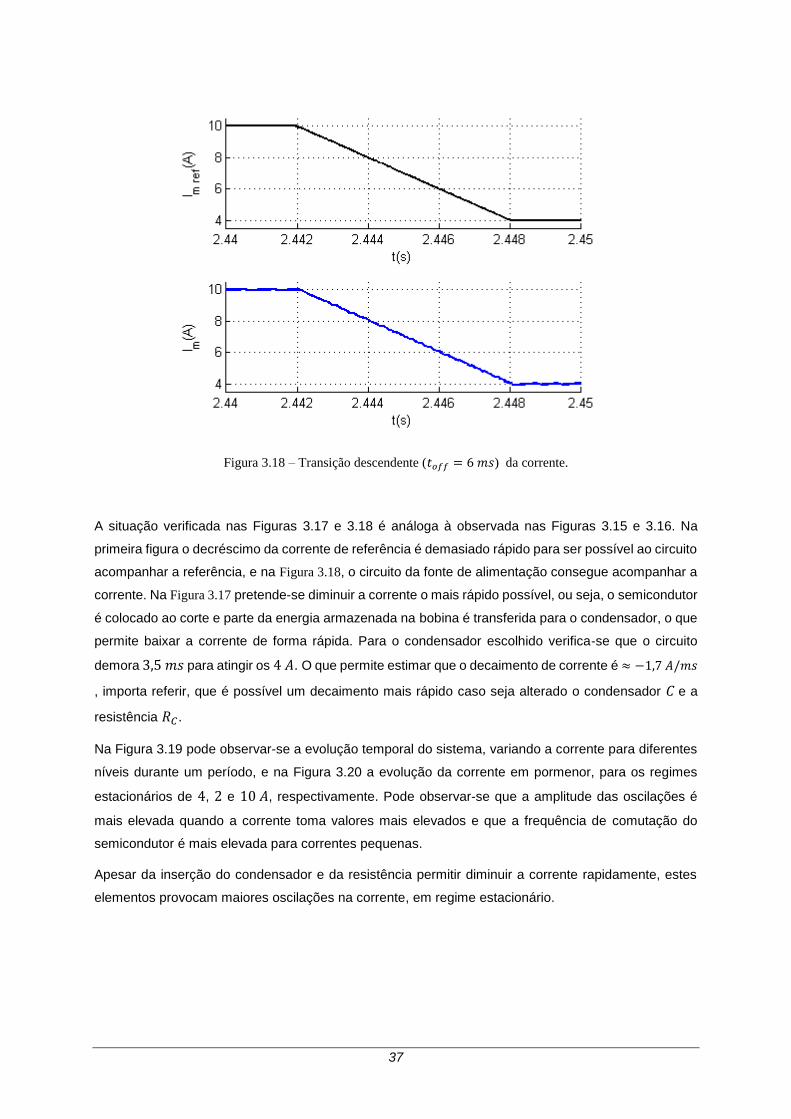
Figura 3.18 – Transição descendente (𝑡𝑜𝑓𝑓 = 6 𝑚𝑠) da corrente.
A situação verificada nas Figuras 3.17 e 3.18 é análoga à observada nas Figuras 3.15 e 3.16. Na
primeira figura o decréscimo da corrente de referência é demasiado rápido para ser possível ao circuito
acompanhar a referência, e na Figura 3.18, o circuito da fonte de alimentação consegue acompanhar a
corrente. Na Figura 3.17 pretende-se diminuir a corrente o mais rápido possível, ou seja, o semicondutor
é colocado ao corte e parte da energia armazenada na bobina é transferida para o condensador, o que
permite baixar a corrente de forma rápida. Para o condensador escolhido verifica-se que o circuito
demora 3,5 𝑚𝑠 para atingir os 4 𝐴. O que permite estimar que o decaimento de corrente é ≈ −1,7 𝐴/𝑚𝑠
, importa referir, que é possível um decaimento mais rápido caso seja alterado o condensador 𝐶 e a
resistência 𝑅𝐶.
Na Figura 3.19 pode observar-se a evolução temporal do sistema, variando a corrente para diferentes
níveis durante um período, e na Figura 3.20 a evolução da corrente em pormenor, para os regimes
estacionários de 4, 2 e 10 𝐴, respectivamente. Pode observar-se que a amplitude das oscilações é
mais elevada quando a corrente toma valores mais elevados e que a frequência de comutação do
semicondutor é mais elevada para correntes pequenas.
Apesar da inserção do condensador e da resistência permitir diminuir a corrente rapidamente, estes
elementos provocam maiores oscilações na corrente, em regime estacionário.
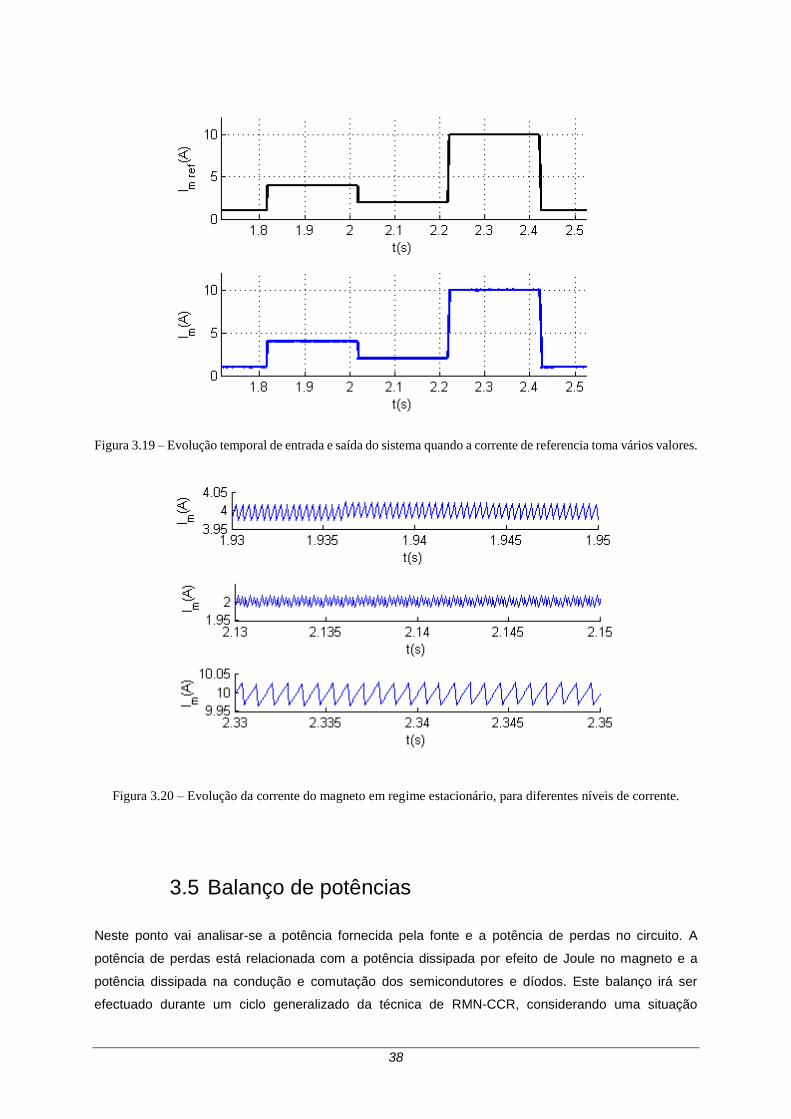
38
Figura 3.19 – Evolução temporal de entrada e saída do sistema quando a corrente de referencia toma vários valores.
Figura 3.20 – Evolução da corrente do magneto em regime estacionário, para diferentes níveis de corrente.
3.5 Balanço de potências
Neste ponto vai analisar-se a potência fornecida pela fonte e a potência de perdas no circuito. A
potência de perdas está relacionada com a potência dissipada por efeito de Joule no magneto e a
potência dissipada na condução e comutação dos semicondutores e díodos. Este balanço irá ser
efectuado durante um ciclo generalizado da técnica de RMN-CCR, considerando uma situação
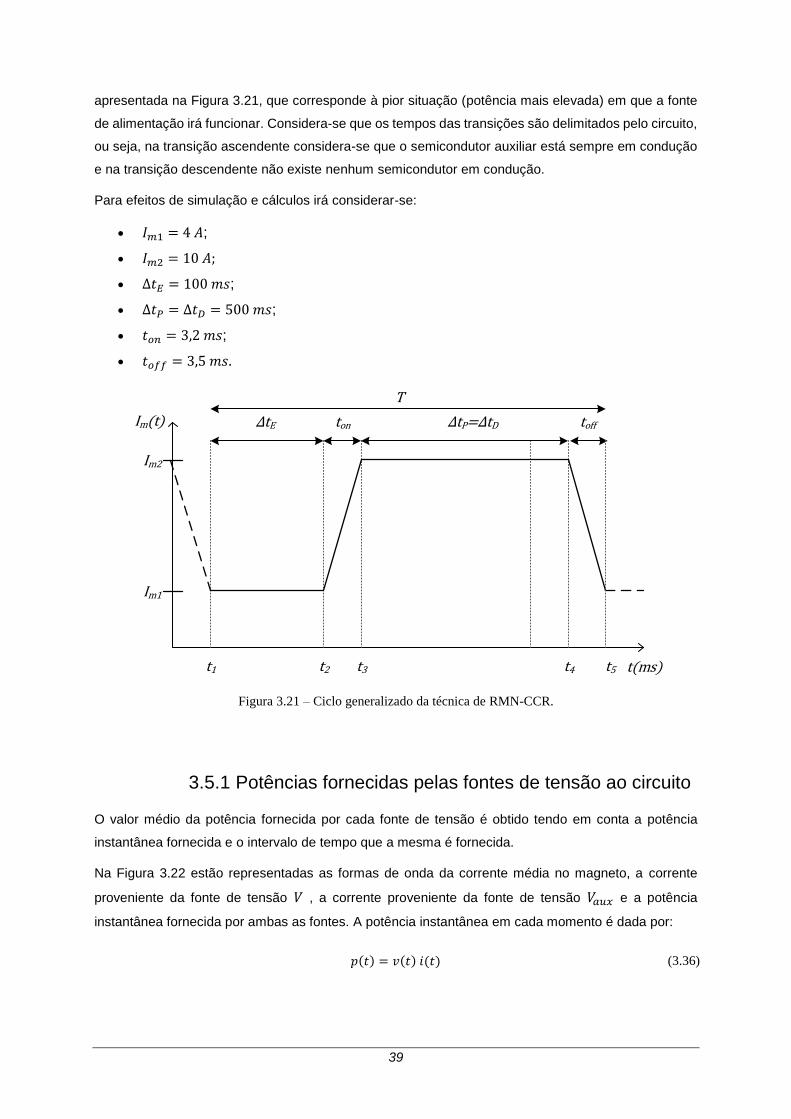
39
apresentada na Figura 3.21, que corresponde à pior situação (potência mais elevada) em que a fonte
de alimentação irá funcionar. Considera-se que os tempos das transições são delimitados pelo circuito,
ou seja, na transição ascendente considera-se que o semicondutor auxiliar está sempre em condução
e na transição descendente não existe nenhum semicondutor em condução.
Para efeitos de simulação e cálculos irá considerar-se:
𝐼𝑚1 = 4 𝐴;
𝐼𝑚2 = 10 𝐴;
∆𝑡𝐸 = 100 𝑚𝑠;
∆𝑡𝑃 = ∆𝑡𝐷 = 500 𝑚𝑠;
𝑡𝑜𝑛 = 3,2 𝑚𝑠;
𝑡𝑜𝑓𝑓 = 3,5 𝑚𝑠.
Im2
Im1
Im(t)
t(ms)
ΔtE ΔtP=ΔtDton toff
T
t1 t2 t3 t4 t5
Figura 3.21 – Ciclo generalizado da técnica de RMN-CCR.
3.5.1 Potências fornecidas pelas fontes de tensão ao circuito
O valor médio da potência fornecida por cada fonte de tensão é obtido tendo em conta a potência
instantânea fornecida e o intervalo de tempo que a mesma é fornecida.
Na Figura 3.22 estão representadas as formas de onda da corrente média no magneto, a corrente
proveniente da fonte de tensão 𝑉 , a corrente proveniente da fonte de tensão 𝑉𝑎𝑢𝑥 e a potência
instantânea fornecida por ambas as fontes. A potência instantânea em cada momento é dada por:
𝑝(𝑡) = 𝑣(𝑡) 𝑖(𝑡) (3.36)

40
Pfornecida(t)
Im1 V
Im2 Vaux
Im2 VIm1 Vaux
t(ms)t1 t2 t3 t4 t5
t(ms)
t(ms)
t(ms)
Im2
Im(t)
Im1
Im2
IV(t)
Im1
Im2
IVaux(t)
Im1
Figura 3.22 – Evolução temporal das correntes provenientes das fontes de tensão e potência instantânea
fornecida pelas fontes de tensão.
A tensão nas fontes considera-se constante, assim, a potência média fornecida por cada fonte durante
um ciclo de funcionamento pode ser obtida por:
{
𝑃𝑉 =
1
𝑇 [(∆𝑡𝐸)𝐼𝑚1𝑉 + (∆𝑡𝐷)𝐼𝑚2 𝑉] = 445 𝑊
𝑃𝑉𝑎𝑢𝑥 =1
𝑇 [(𝑡𝑜𝑛)
𝐼𝑚1𝑉𝑎𝑢𝑥 + 𝐼𝑚2 𝑉𝑎𝑢𝑥2
] = 14,8 𝑊
(3.37)
Na Figura 3.23 está representado o resultado obtido através de simulação. Na parte superior da
imagem está representada a potência instantânea fornecida pela fonte de tensão 𝑉 e na parte inferior
da imagem está representada a potência instantânea fornecida pela fonte de tensão 𝑉𝑎𝑢𝑥. Devido à
rapidez das transições, não é perceptível na figura, mas a fonte de tensão de 𝑉 não fornece qualquer
energia durante a transição ascendente e descendente.

41
Figura 3.23 – Potencias instantâneas fornecidas pelas fontes de tensão.
3.5.2 Potências dissipadas nos semicondutores
Apesar de em grande parte dos cálculos e considerações se desprezar a queda de tensão nos
semicondutores, na realidade estes não são ideais e possuem quedas de tensão. Normalmente as
quedas de tensão e resistências internas são pequenas quando comparadas com as grandezas do
circuito, no entanto podem provocar um grande aquecimento nos semicondutores. Por isso, a potência
dissipada nos semicondutores tem especial interesse para dimensionar, caso necessário, os
dissipadores de calor para os mesmos. Podem ser estimadas perdas (potências dissipadas) durante a
condução e nas comutações. Contudo irão desprezar-se as potências dissipadas nas comutações,
devido ao ser valor reduzido, e irão estimar-se as perdas durante a condução para a pior situação
(maior queda de tensão) apresentada no catálogo do semicondutor (catálogos do IGBT e do Díodo, em
anexo).
A potência dissipada durante a condução de um IGBT (semicondutor 𝑆 e 𝑆𝑎𝑢𝑥) ou Díodo (𝐷 e 𝐷𝑎𝑢𝑥) é
dada por [Silva,2013]:
𝑃𝑂𝑁 = 𝑉𝑂𝑁𝐼𝑚é𝑑 + 𝑟𝑂𝑁𝐼𝑒𝑓2 ≈ 𝑉𝑂𝑁 𝐼𝑚é𝑑 (3.38)
Do catálogo do IGBT pode obter-se a queda de tensão máxima, quando em condução, 𝑉𝑂𝑁 = 𝑉𝐶𝐸 =
2.7 𝑉 . No catálogo do Díodo verifica-se que 𝑉𝑂𝑁 = 𝑉𝐹 = 1,5 𝑉. A resistência interna 𝑟𝑂𝑁 nestes
dispositivos é muito pequena por isso pode ser desprezada.
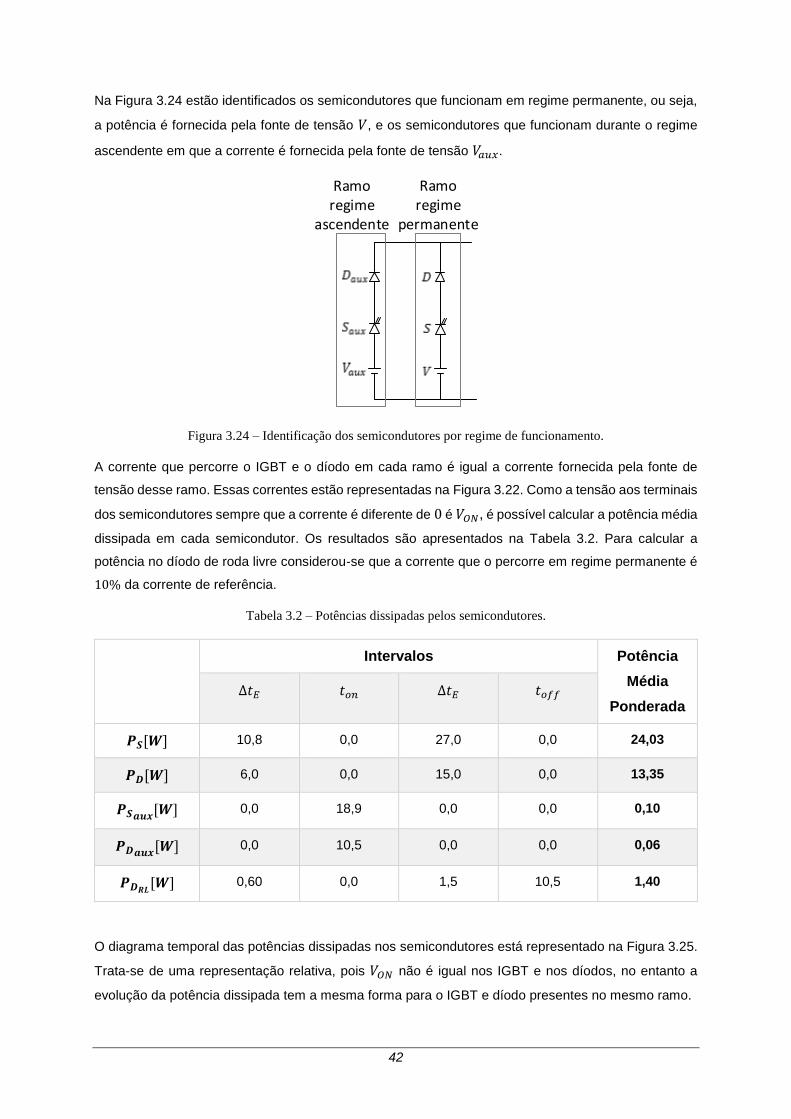
42
Na Figura 3.24 estão identificados os semicondutores que funcionam em regime permanente, ou seja,
a potência é fornecida pela fonte de tensão 𝑉, e os semicondutores que funcionam durante o regime
ascendente em que a corrente é fornecida pela fonte de tensão 𝑉𝑎𝑢𝑥.
Ramo regime
ascendente
Ramo regime
permanente
Figura 3.24 – Identificação dos semicondutores por regime de funcionamento.
A corrente que percorre o IGBT e o díodo em cada ramo é igual a corrente fornecida pela fonte de
tensão desse ramo. Essas correntes estão representadas na Figura 3.22. Como a tensão aos terminais
dos semicondutores sempre que a corrente é diferente de 0 é 𝑉𝑂𝑁, é possível calcular a potência média
dissipada em cada semicondutor. Os resultados são apresentados na Tabela 3.2. Para calcular a
potência no díodo de roda livre considerou-se que a corrente que o percorre em regime permanente é
10% da corrente de referência.
Tabela 3.2 – Potências dissipadas pelos semicondutores.
Intervalos Potência
Média
Ponderada
∆𝑡𝐸 𝑡𝑜𝑛 ∆𝑡𝐸 𝑡𝑜𝑓𝑓
𝑷𝑺[𝑾] 10,8 0,0 27,0 0,0 24,03
𝑷𝑫[𝑾] 6,0 0,0 15,0 0,0 13,35
𝑷𝑺𝒂𝒖𝒙[𝑾] 0,0 18,9 0,0 0,0 0,10
𝑷𝑫𝒂𝒖𝒙[𝑾] 0,0 10,5 0,0 0,0 0,06
𝑷𝑫𝑹𝑳[𝑾] 0,60 0,0 1,5 10,5 1,40
O diagrama temporal das potências dissipadas nos semicondutores está representado na Figura 3.25.
Trata-se de uma representação relativa, pois 𝑉𝑂𝑁 não é igual nos IGBT e nos díodos, no entanto a
evolução da potência dissipada tem a mesma forma para o IGBT e díodo presentes no mesmo ramo.
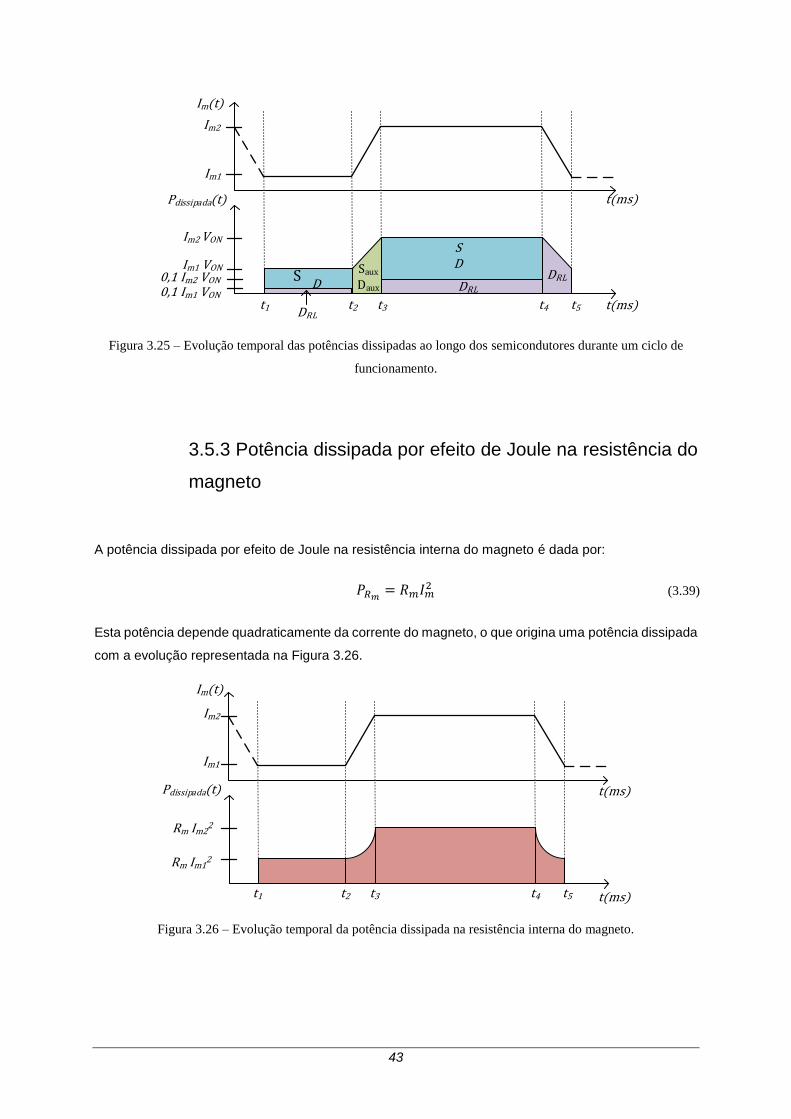
43
Im2
Im(t)
Im1
Pdissipada(t)
Im1 VON
Im2 VON
t(ms)
t(ms)t1 t2 t3 t4 t5
SDSaux
Daux
DRL
SD
0,1 Im1 VON
0,1 Im2 VONDRL
DRL
Figura 3.25 – Evolução temporal das potências dissipadas ao longo dos semicondutores durante um ciclo de
funcionamento.
3.5.3 Potência dissipada por efeito de Joule na resistência do
magneto
A potência dissipada por efeito de Joule na resistência interna do magneto é dada por:
𝑃𝑅𝑚 = 𝑅𝑚𝐼𝑚2 (3.39)
Esta potência depende quadraticamente da corrente do magneto, o que origina uma potência dissipada
com a evolução representada na Figura 3.26.
Pdissipada(t)
Rm Im12
Rm Im22
Im2
Im(t)
Im1
t(ms)
t(ms)t1 t2 t3 t4 t5
Figura 3.26 – Evolução temporal da potência dissipada na resistência interna do magneto.

44
Na Tabela 3.3 estão representadas as potências dissipadas em cada fase de funcionamento do sistema
durante um período da técnica de RMN-CCR.
Tabela 3.3 – Potencia dissipada na resistência interna do magneto.
Intervalos Potência
média
Ponderada
∆𝑡𝐸 𝑡𝑜𝑛 ∆𝑡𝐸 𝑡𝑜𝑓𝑓
𝑷𝑹𝒎[𝑾] 48,0 147,0 300,0 147,0 256,77
3.6 Dimensionamento do dissipador
Tendo em conta as potências dissipadas pelos semicondutor, é necessário determinar se os mesmos
conseguem dissipar todo o calor originado. Caso se verifique que o semicondutor não tem capacidade
para dissipar o calor é fundamental dimensionar um dissipador de calor para evitar que o semicondutor
entre em sobreaquecimento.
Na Figura 3.27 está representado, em corte, o dissipador e o IGBT/Díodo (junção e cápsula), assim
como o esquema térmico equivalente, do lado direito da figura. O esquema equivalente é composto por
resistência térmica entre o semicondutor (junção) e a cápsula, representada por 𝑅𝑡ℎ𝑗−𝑐., a resistência
térmica entre a cápsula e o dissipador, 𝑅𝑡ℎ𝑐−𝑑, e a resistência térmica entre o dissipador e o meio
ambiente, 𝑅𝑡ℎ𝑑−𝑎.
JunçãoCápsula
Dissipador
Figura 3.27 – Equivalente do circuito térmico do semicondutor e dissipador.
Os semicondutores de potência tem uma temperatura máxima de funcionamento (mencionada no
catálogo) e são caracterizados por uma resistência térmica entre o semicondutor e a cápsula. No
catálogo é possível observar que a potência que o IGBT consegue dissipar quando este está a uma
temperatura de 100 °𝐶 é 17 𝑊. Como se estima que o semicondutor, 𝑆, atinja essa temperatura caso
esteja em funcionamento durante vários ciclos, é necessário colocar um dissipador de calor nesse
semicondutor. No caso do semicondutor auxiliar 𝑆𝑎𝑢𝑥, não é necessário dissipador, uma vez que o
45
tempo de funcionamento em cada ciclo é muito reduzido, por isso este consegue dissipar todo o calor
sem qualquer dissipador. A potência dissipada nos díodos é inferior, como se pode observar na Tabela
3.2, por isso também não é necessário qualquer dissipador.
Considerando que o semicondutor é uma fonte de calor a uma temperatura 𝑇𝑗, é necessário garantir
que a temperatura na junção é inferior à temperatura máxima admissível para a junção. Assim obtém-
se:
𝑇𝑗𝑚á𝑥 > 𝑇𝑎𝑚𝑏 + 𝑃𝑑𝑖𝑠𝑠𝑖𝑝𝑎𝑑𝑎 (𝑅𝑡ℎ𝑗−𝑐 + 𝑅𝑡ℎ𝑐−𝑑 + 𝑅𝑡ℎ𝑑−𝑎) (3.40)
Através do catálogo pode retirar-se que a temperatura máxima suportada pelo IGBT é 150 °𝐶 e que a
resistência térmica 𝑅𝑡ℎ𝑗−𝑐 = 3 °𝐶/𝑊 . Assumindo a temperatura ambiente é 30 °𝐶 e que a
resistência térmica 𝑅𝑡ℎ𝑐−𝑑 tem um valor muito baixo que é possível ser desprezada. A resistência
térmica do dissipador é:
𝑅𝑡ℎ𝑑−𝑎 <𝑇𝑗𝑚á𝑥 − 𝑇𝑎𝑚𝑏 − 𝑃𝑑𝑖𝑠𝑠𝑖𝑝𝑎𝑑𝑎 ∙ 𝑅𝑡ℎ𝑗−𝑐
𝑃𝑑𝑖𝑠𝑠𝑖𝑝𝑎𝑑𝑎= 2 °𝐶/𝑊 (3.41)
Através do valor para a resistência térmica é possível escolher um dissipador para o IGBT. Um exemplo
é o dissipador da Figura 3.28 que tem um resistência térmica de 1,8 °/𝑊 com as dimensões
100 𝑥 120 𝑥 32𝑚𝑚.
Figura 3.28 – Dissipador para IGBT (Fabricante: Fischer Elektronik).


Capítulo 4
Estudo Térmico do Magneto
4. Fonte de Alimentação
O magneto descrito na secção 2.4 é utilizado em conjunto com a fonte de alimentação para criar o
campo magnético necessário para a técnica de RMN-CCR. A passagem da corrente pelas bobinas
provoca perdas por efeito de Joule, calculadas na secção 3.5.3. A dissipação provoca um aquecimento
nos fios de cobre das bobinas que tende a aquecer toda a estrutura do magneto
Tendo em conta que todos os elementos que constituem o magneto (materiais isolantes, enrolamentos
e núcleo ferromagnético) têm o seu desempenho condicionado por limitações de temperatura, torna-se
importante avaliar as necessidades de refrigeração do magneto, de modo a que as temperaturas limites
dos materiais não sejam ultrapassadas.
Para além das limitações referidas é importante garantir que a temperatura em torno da amostra não
sofre grandes variações, pois essa variação pode ter bastante influência nos resultados obtidos através
da técnica de RMN-CCR.
Este estudo é realizado com recurso a um software de elementos finitos 2D (Finite Element Method
Magnetics, “FEMM”).

48
4.1 Constituição do magneto
Na Figura 4.1 encontra-se uma foto da última versão do magneto desenvolvido por investigadores so
Instituto Superior Técnico.
Figura 4.1 – Foto do magneto em estudo [Roque, 2014b].
O núcleo de ferro é constituído por quatro pernas na zona exterior, que permitem que as linhas de
campo se fechem. Estas pernas tem forma cilíndrica e possuem um diâmetro de 30 𝑚𝑚. A perna
central, também cilíndrica, tem o dobro do diâmetro (60 𝑚𝑚). Esta perna é interrompida a meio por um
entreferro de 20 𝑚𝑚, onde é colocada a amostra. Em torno da perna central são colocadas quatro
bobinas, cada uma com 160 espiras. Estas bobinas estão ligadas em série e são percorridas por uma
corrente 𝐼𝑚 . A colocação das bobinas e espaçamento entre elas não está bem definido e pretende-se
com este estudo analisar o impacto que a sua colocação tem sobre o aquecimento do magneto.

49
4.2 Propriedades dos materiais
Para efectuar a simulação é necessário conhecer as propriedades dos materiais com que o magneto é
construído. O núcleo do magneto é constituído essencialmente por ferro, e os enrolamentos das
bobinas são em cobre. Apesar de na simulação ser considerado que os enrolamentos são apenas
cobre, na realidade, estes enrolamentos possuem isolamento eléctrico. E é necessário ter em conta
que o isolamento pode começar a danificar-se para temperaturas próximas dos 200 ℃. Em torno do
núcleo e das bobinas o magneto é envolvido por ar.
Cada um destes materiais possui características térmicas distintas. Neste caso é necessário saber
quais são as condutividades térmicas, a capacidades calorificas de cada material.
A condutividade térmica é a quantidade de calor que passa por unidade de tempo através de um cilindro
de área 𝐴 unitária (1 𝑚2) e comprimento 𝐿 também unitária (1 𝑚) quando a diferença de temperatura
entre as faces é unitária (1 °𝐾).
A capacidade calorífica, também designa por capacidade térmica é a grandeza física que determina a
relação entre a quantidade de calor fornecida a um corpo e a variação de temperatura observada neste.
A Tabela 4.1 contém a condutividade térmica e capacidade calorífica dos materiais do magneto, para
uma temperatura de 25℃ , que corresponde a temperatura ambiente considerada na simulação.
Tabela 4.1 – Propriedades dos materiais do magneto [Engineering,2014], [Mspc, 2014].
𝑴𝒂𝒕𝒆𝒓𝒊𝒂𝒍
CONDUTIVIDADE
TÉRMICA (𝟐𝟓℃)
[𝑾 𝒎−𝟏𝑲−𝟏]
CAPACIDADE
CALORIFICA
(𝟐𝟓℃)
[𝑴𝑱 𝒎−𝟑𝑲−𝟏]
Ar 0,024 0,00121
Ferro 80 3,537
Cobre 401 3,45
4.3 Estudo com elementos finitos (FEMM)
Para estudar o comportamento térmico do magneto é utilizado o software de elementos finitos 2D
(FEMM). Para isso é realizado um corte transversal no magneto, representado na Figura 4.2 com as
dimensões reais do magneto existente.

50
180
mm
80 m
m
20 m
m20
mm
30 mm 30 mm
20 m
m20
mm
60 mm
30 mm 30 mm
Figura 4.2 – Corte transversal do magneto com respectivas dimensões.
Na Figura 4.3 está o resultado obtido quando a potência dissipada no magneto é 300 𝑊. Essa potencia
corresponde à potencia máxima dissipada durante o ciclo de funcionamento considerado na secção
anterior. Nesta simulação é considerado que as bobinas de 160 espiras estão juntas. Verifica-se que
que os enrolamentos de cobre atingem 115,85 ℃, (389 °𝐾) e que a temperatura do núcleo de ferro é
91,05 ℃
Figura 4.3 – Resultado da simulação em elementos finitos sem espaçamento entre enrolamentos.

51
Numa segunda simulação (Figura 4.4), afastou-se as bobinas de 150 espiras 1 𝑐𝑚 e manteve-se a
mesma potencia dissipada. Verificou-se uma diminuição de 2,30 ℃ na temperatura da bobina de cobre.
Figura 4.4 – Resultado da simulação em elementos finitos com espaçamento de 1 𝑐𝑚 entre enrolamentos.
Apesar de existir uma diminuição na temperatura dos enrolamentos, essa diminuição não é muito
acentuada. Uma solução para baixar a temperatura do magneto é instalar um sistema de ventilação.
Com um sistema de ventilação, o ar pode circular dez vezes mais rápido, o que corresponde a ter uma
condutividade térmica dez vezes maior. Assim simulou-se novamente o magneto, efectuando essa
consideração.
Pode observar-se na Figura 4.5 que as temperaturas baixaram drasticamente. A temperatura dos
enrolamentos de cobre passou a ser 44,75 ℃ (318 °𝐾).
Para completar esta análise foram efectuadas simulações, cujos resultados se encontram nas Tabelas
4.2 e 4.3, onde podem ser comparadas as temperaturas nos enrolamentos de cobre, no interior do
núcleo e num ponto médio do entreferro. A primeira tabela apresenta os resultados considerando o
magneto sem ventilação e a segunda tabela tem em conta a ventilação. Em ambas as tabelas fez-se
variar a potência dissipada nas bobinas, para observar o impacto que esta potência no comportamento
témico.

52
Figura 4.5 – Resultado da simulação em elementos finitos com espaçamento de 1 𝑐𝑚. Entre enrolamentos e
ventilação.
Tabela 4.2 – Temperaturas atingidas no magneto sem ventilação.
𝑷𝒅𝒊𝒔𝒔𝒊𝒑𝒂𝒅𝒂(𝑾) 𝑻𝒆𝒏𝒓𝒐𝒍𝒂𝒎𝒆𝒏𝒕𝒐𝒔(℃) 𝑻𝒏𝒖𝒄𝒍𝒆𝒐(℃) 𝑻𝒆𝒏𝒕𝒓𝒆𝒇𝒆𝒓𝒓𝒐(℃)
100 53,85 46,35 46,65
200 83,65 68,65 69,25
300 113,55 91,05 91,85
400 143,35 113,35 114,45
500 173,15 135,65 137,15
Tabela 4.3 – Temperaturas atingidas no magneto com ventilação.
𝑷𝒅𝒊𝒔𝒔𝒊𝒑𝒂𝒅𝒂(𝑾) 𝑻𝒆𝒏𝒓𝒐𝒍𝒂𝒎𝒆𝒏𝒕𝒐𝒔(℃) 𝑻𝒏𝒖𝒄𝒍𝒆𝒐(℃) 𝑻𝒆𝒏𝒕𝒓𝒆𝒇𝒆𝒓𝒓𝒐(℃)
100 30,95 30,15 30,25
200 37,85 36,25 36,45
300 44,75 42,35 42,75
400 51,65 48,45 48,95
500 58,55 54,55 55,15

53
Com base nos resultados obtidos, considera-se essencial a colocação de um sistema de ventilação.
A análise efectuada não teve em conta perdas no ferro (correntes de Foucalt), pois estas não são
significativas.


Capítulo 5
Conclusões
5. Fonte de Alimentação
Neste capítulo é analisada a evolução dos espectrómetros de Ressonância Magnética Nuclear (RMN)
de Campo Cíclico Rápido CCR). Depois são retiradas as conclusões sobre o circuito da fonte de
alimentação elaborado, identificando os aspectos positivos e negativos da solução desenvolvida. Por
último são realizadas as conclusões relativas ao estudo térmico do magneto.

56
5.1 Evolução dos espectrómetros de RMN-CCR
Desde os anos 50, onde foi construído o primeiro espectrómetro de RMN-CCR, tem-se verificado uma
grande evolução na construção dos espectrómetros de RMN-CCR. Passou de um sistema mecânico
para um sistema puramente eléctrico. Este avanço em muito se deve ao avanço alcançado nos
semicondutor de potência. Outro avanço importante foi a construção do magneto, passou de uma
bobina construída a partir de cilindro de metal com um passo variável da hélice (Figura 1.4), para um
magneto construído com um núcleo ferromagnético. Este avanço tornou possível diminuir muito a
dimensão do equipamento, tornando-o móvel, sem existir necessidade de um sistema de refrigeração
dispendioso e volumosos.
A topologia da fonte de alimentação desenvolvida nesta dissertação permitem obter campos
magnéticos até 0,4 𝑇. Este aumento, significativo, da capacidade da fonte de alimentação permite o
estudo de outros elementos como o fluor, que devido à sua constante giromagnética não era possível
ser analisado no protótipo actual do IST.
O magneto analisado nesta dissertação, possui grandes vantagens fase aos magnetos anteriormente
desenvolvidos. O magneto possui uma maior mobilidade e uma maior homogeneidade de campo no
seu entreferro.
5.2 Fonte de Alimentação
O circuito da fonte de alimentação assim como o sistema de controlo desenvolvidos ao longo do
capítulo 3, é um sistema alternativo ao encontrado em funcionamento no protótipo do IST. O sistema
desenvolvido visa controlar a corrente através da comutação de semicondutores.
Os resultados obtidos estão de acordo com as especificações necessárias para a técnica de RMN-
CCR. A fonte desenvolvida permite comutar de uma corrente elevada 10 𝐴 para uma corrente de 4 𝐴
em apenas 3,5 𝑚𝑠. E efectuar o processo inverso em cerca de 3,2 𝑚𝑠. Permite obter vários níveis de
corrente com um grau de precisão bastante aceitável. Verificou-se, através da simulação, que para a
corrente de 10 𝐴 o tremor da corrente é ± 0,31 %, enquanto o tremor da corrente para uma corrente
de 2 𝐴 o tremor da corrente é ± 1,3 %.
57
5.3 Magneto
A análise efectuada ao magneto permitiu estudar o comportamento térmico do mesmo quando
submetido a elevadas correntes, 10 𝐴, que originam grandes potências dissipadas nos seus
enrolamentos.
Apesar do estudo ter sido realizado a duas dimensões, permitiu analisar a distribuição de calor no
magneto.
Pode concluir-se que é necessário implementar um sistema de ventilação de pequenas dimensões no
magneto para garantir que este não atinge temperaturas demasiado elevadas, que possam levar a
danificação dos enrolamentos das bobinas.
5.4 Trabalhos futuros
Com a realização desta dissertação, novas ideias surgiram, a maioria com vista a melhorar o
desempenho do sistema.
Como exemplo de alguns temas sugeridos enumeram-se os seguintes:
– Relativamente a fonte de alimentação, é possível melhorar o tempo de subida e descia da corrente.
Esse processo requer fontes de tensão com maior capacidade e a redefinição dos semicondutores.
Nesse contexto podem ser estudadas as vantagens/desvantagens de inserir um semicondutor que
controla a descida da corrente. Este processo permitiria menos tremor em regime estacionário, mas
aumentaria a complexidade do circuito.
– Desenvolvimento de um novo magneto com dimensões mais reduzidas, que permita cumprir todas
as especificações exigidas pela técnica de RMN-CCR. Pretende-se um magneto capaz de ser utilizado
em ambientes industriais, capaz de se adequar aos processos e necessidades da amostra a estudar.
Existe uma necessidade constante de adequar a fonte de alimentação às características do magneto.
Por isso será necessário adaptar a topologia da fonte de tensão sempre que o magneto sofre
alterações.

59
Referências
Referências
[Abragam,1978] Abrangam, A.: “The Principles of Nuclear Magnetis”, Oxford University Press,
1978.
[Anoardo, 2001] Anoardo, E; Galli, G; Ferrante, G.: “Fast-Field-Cycling NMR: Applications and
Instrumentation”, Appl. Magn. Reson.,20, oo365-404, 2001.
[Constantin, 1996] Constantin, J.; Zajicek, J.; Brown F.:, “Fast Field-Cycling Nuclear Magnetic
Resonance Spectrometer”, Rev. Sci. Instrum., vol. 67, pp. 2113-2122, 1996.
[Engineering, 2014] http://www.engineeringtoolbox.com/thermal-conductivity-d_429.html, última
consulta 01/10/2014.
[Faria, 2008] Faria, J. A. B.: “Electromagnetic Foundations of Electrical Engineering”, Wiley
& Sons (ISBN 978-0-470-72709-6), 2008.
[Ferrante, 2004] Ferrante, G.; Sykora, S.: “Technical Aspects of Fast Field Cycling” Published
in Advances in Inorganic Chemistry, Vol. 57,2004
[Gil, 1986] Gil, V.M. S.; Geraldes, F. G. C.: ”Ressonancia Magnética Nuclear
Fundamentos, Métodos e Aplicações”, Fundação Calouste Gulbenkien, ISBN
972-31-0969-7, 1987.
[Kimmich, 2004] Kimmich, R; Anoardo, E: “Field-Cycling NMR relaxometry”, Progress in NMR
Spectroscopy, 44, pp. 257-320, 2004
[Mspc, 2014]. http://www.mspc.eng.br/fldetc/fluid_06B0.shtml, última consulta 01/10/2014
[Noack, 1986] Noack, F: “NMR Field-Cycling Spectroscopy: Principles and Aplications”,
Progress in NMR Spectroscopy, vol 18, pp. 171-276, 1986.
[Ogata, 2010] Ogata, K.: “Modern Control Engineering”, 5th Edition, Prentice-Hall 2010.
[Roque, 2012] Roque, A., Pinto, S. F., Santana, J., Sousa, D. M., Margato, E., Maia, J.:
“Dynamic Behavior of Two Power Supplies for FFC NMR Relaxometers”, IEEE
International Conference on Industrial Technology – ICIT 2012, Athens -
Greece, 2012.
[Roque, 2014a] Roque, A:”Espectrometro de RMN-CCR com utilização de supercondutores no
magneto”, Tese para obtenção do grau de Doutor, Março de 2014.
[Roque, 2014b] Roque, A: “Flux density distribution of a magnet with axial symmetry to be used
in FFC-NMR”, International Conference on Superconductivity and Magnetism

60
(ICSM), Turquia 2014.
[Roque, 2014c] Roque, A., Marques, G. D., Sousa, D. M., Margato, E., Maia, J.: “Control of a
Power Supply with Cycling Current Using Different Controllers”, International
Symposium on Power Electronics, Electrical Drives, Automation and Motion
(SPEEDAM), 2014.
[Satheesh, 2004] Satheesh, V.; Galkin, A.; Sykora, S.; Ferrante, G: “Field Cycling NMR
Relaxometry-Review of Technical Issues and Applications”, Stelar s.r.l, 2004
[Seitter, 1999] Seitter, R; Kimmich, R: “Magnetic Resonance: Relaxometers”, Encyclopedia of
Spectroscopy and Spectrometry, Academic Press, London, pp. 2000-2008,
1999.
[Silva, 1998] Silva, J. F.: “Eléctrónica Industrial”, , Fundação Calouste Gulbenkian, ISBN
972-31-0801-1, Lisboa, 2013.
[Silva, 2013] Silva, J. F.: “Eléctrónica Industrial”, 2ª Edição, Fundação Calouste Gulbenkian,
ISBN 978-972-31-1499-7, Lisboa, 2013.
[Sousa, 2010] Sousa, D. M., Marques, G. D., Cascais, J. M., Sebastião, P. J.:“Desktop Fast-
Field Cycling Nuclear Magnetic Resonance Relaxometer”, Solid State Nuclear
Magnetic Resonance, vol. 38, pp. 36-43, 2010.
[STELAR, 2014] http://www.stelar.it/products_spinmaster.htm, ultima consulta 01/10/2014.
Anexo 1
Catálogos
Catálogos
No Anexo 1 são apresentados os catálogos do IGBT, do Díodo e do dissipador de calor.
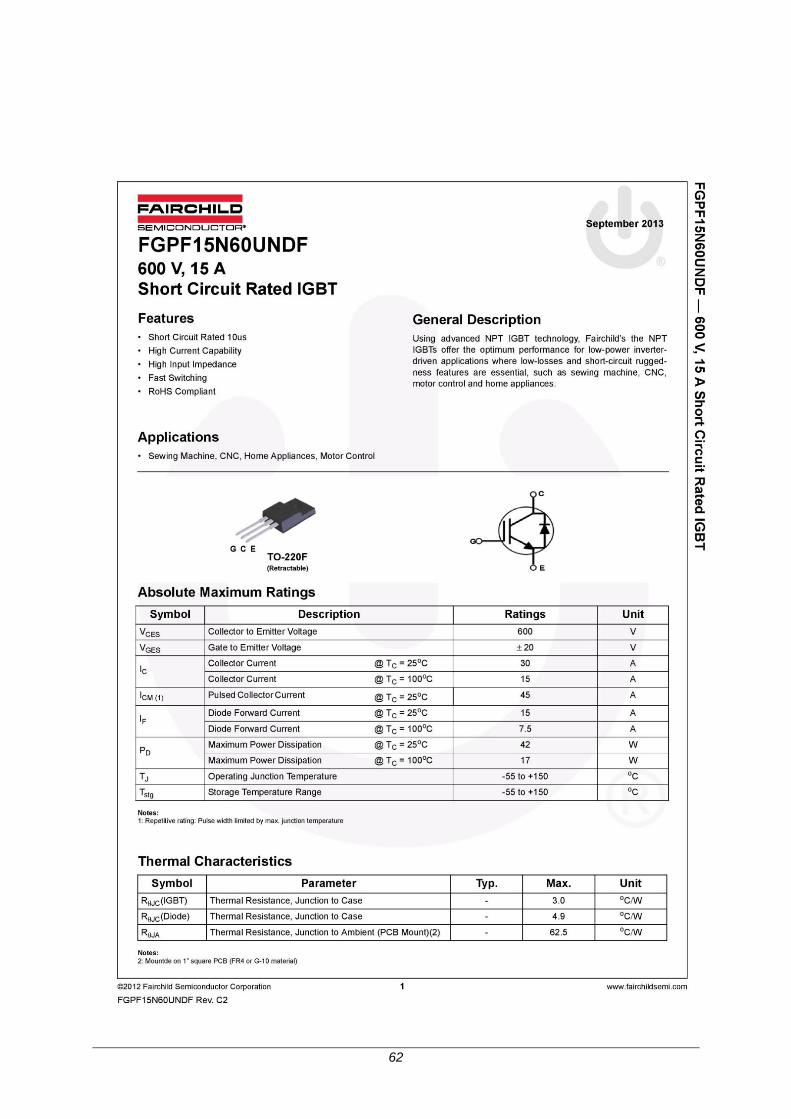
62
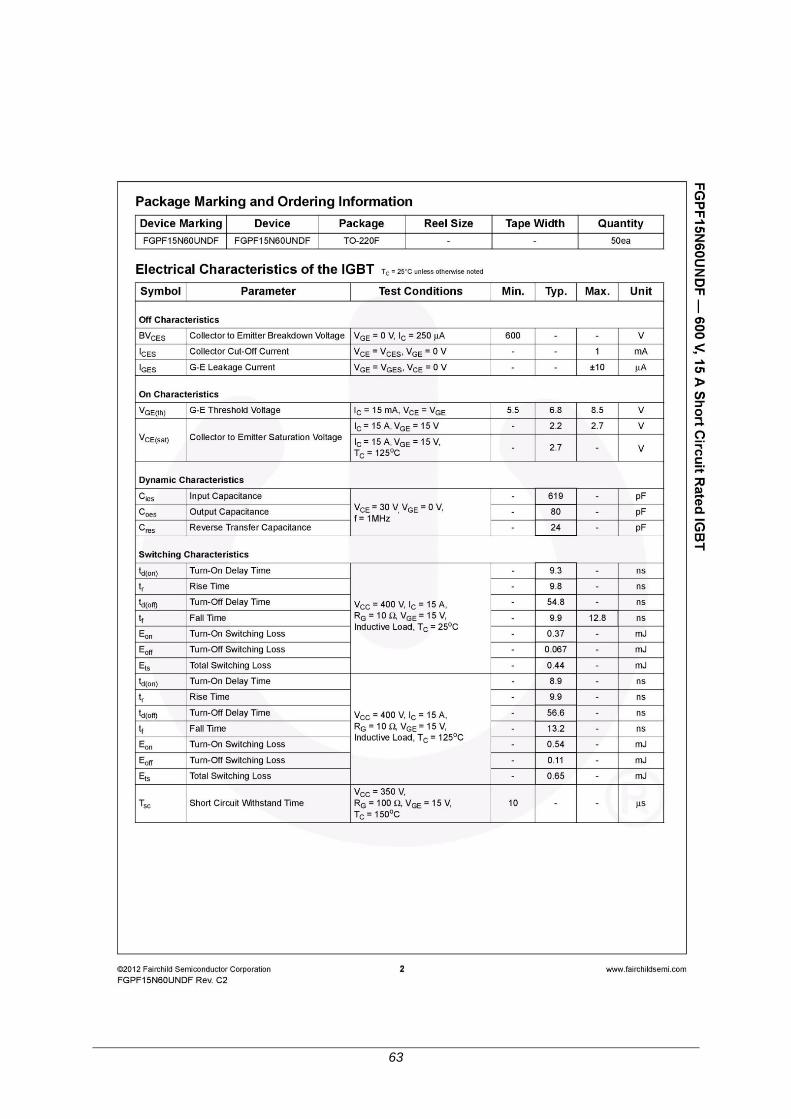
63

64

65
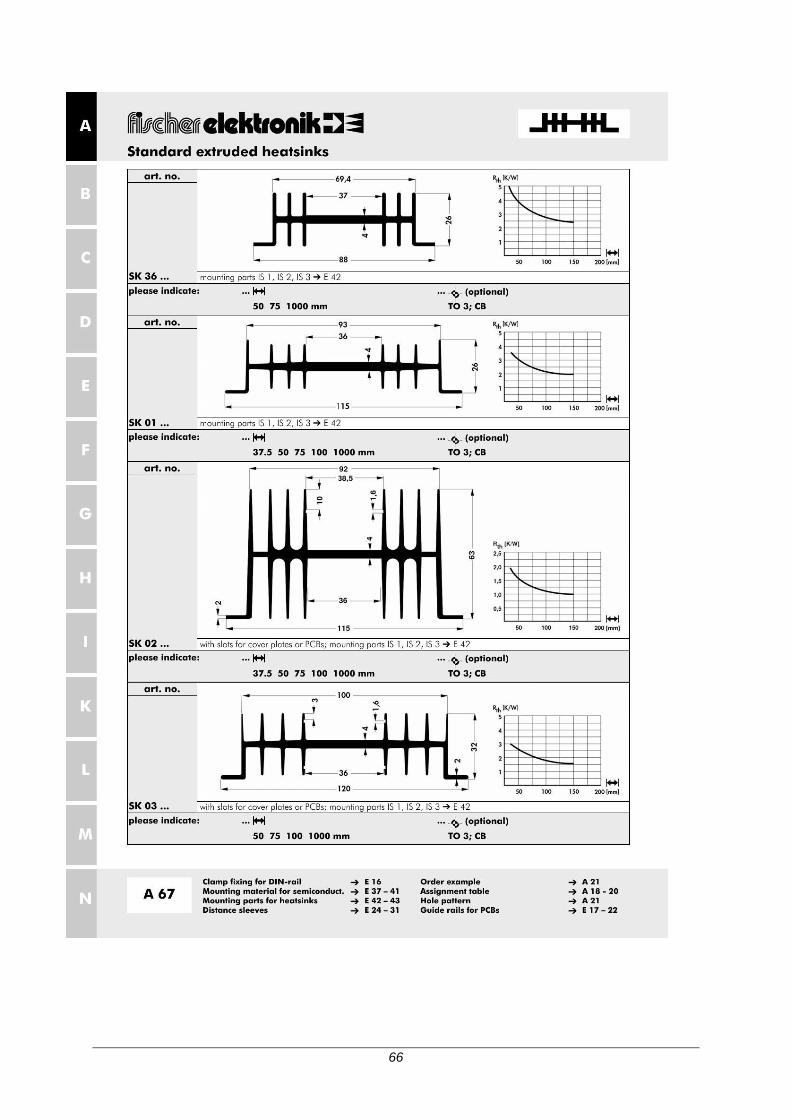
66

Anexo 2
Análise Vários Regimes de Funcionamento
Catálogos
Neste Anexo estão as deduções para a forma de onda da corrente nas várias situações consideradas
para o funcionamento da fonte de tensão.

68
Semicondutor à condução:
R
L
I
V
Figura A2.1 – Circuito com semicondutor em condução.
Através do circuito:
𝐿𝑑 𝐼(𝑡)
𝑑𝑡+ 𝑅 ∙ 𝐼(𝑡) = 𝑉
Efectuando a transformação de Laplace:
𝐿 ∙ 𝐼(𝑠) ∙ 𝑠 + 𝑅𝑅 ∙ 𝐼(𝑠) = 𝑉
𝐼(𝑠) =𝑉
𝐿 ∙ 𝑠 + 𝑅=
𝑉𝐿
𝑠 +𝑅𝐿
Como 𝑉 = 400 𝑉, 𝑅 = 3 𝛺 e 𝐿 = 200𝑚𝐻.
Em regime permanente, 𝐼(𝑡 = ∞) =𝑉
𝑅= 133.33 𝐴.
O polo é dado por 𝑠 = −𝑅
𝐿= −15.
Constante de tempo é dada por:
𝜏 = −1
𝑠= −
1
−15= 0.0667𝑠 = 66.7𝑚𝑠
A evolução da corrente para o semicondutor em condução é expressa por:
𝐼(𝑡) =𝑉
𝑅+ 𝐴 ∙ 𝑒𝑠∙𝑡 =
𝑉
𝑅+ 𝐴 ∙ 𝑒−
𝑅𝐿∙𝑡
Considerando que no instante inicial a corrente é 0A. Tem-se:
𝐼(𝑡) =𝑉
𝑅−𝑉
𝑅∙ 𝑒−
𝑅𝐿∙𝑡 =
𝑉
𝑅∙ (1 − 𝑒−
𝑅𝐿∙𝑡)

69
Regime Descendente 1:
C
R
L
I
Figura A2.2 – Regime descendente 1.
Através do circuito:
𝐿𝑑 𝐼(𝑡)
𝑑𝑡+ 𝑅 ∙ 𝐼(𝑡) +
1
𝐶∫ 𝐼(𝑡) 𝑑𝑡𝑡
0
= 0
Transformação de Laplace:
𝐿 ∙ 𝐼(𝑠) ∙ 𝑠 + 𝑅 ∙ 𝐼(𝑠) +1
𝐶 ∙ 𝑠𝐼(𝑠) = 0
↔ 𝐿 ∙ 𝑠 + 𝑅 +1
𝐶 ∙ 𝑠= 0
↔ 𝐿 ∙ 𝑠2 + 𝑅 ∙ 𝑠 +1
𝐶= 0
↔ 𝑠1,2 =−𝑅 ±√𝑅2 − 4 ∙ 𝐿 𝐶⁄
2 ∙ 𝐿
↔ 𝑠1,2 = −𝑅
2 ∙ 𝐿± √
1
4(𝑅
𝐿)2
−1
𝐿 ∙ 𝐶
Para que os polos não sejam complexos:
Tem-se 1
4(𝑅
𝐿)2−
1
𝐿∙𝐶≥ 0 e como 𝑅 = 3 𝛺, 𝐿 = 200 𝑚𝐻 e 𝐶 > 0
𝐶 ≥4
𝐿(𝐿
𝑅)2↔ 𝐶 ≥ 88.89 𝑚𝐹.
Para 0 < C < 0.0889 F
𝑠1,2 = −7.5 ± √56.25 −5
𝐶 Polos Complexos
𝑠1,2 = −𝑅
2 ∙ 𝐿± 𝒊 ∙ √
1
𝐿 ∙ 𝐶− (
𝑅
2 ∙ 𝐿)2
= 𝛼 ± 𝒊 ∙ 𝛽

70
𝐼(𝑡) = 𝐴 ∙ 𝑒𝑠1∙𝑡 + 𝐵 ∙ 𝑒𝑠2∙𝑡 = 𝐴 ∙ 𝑒(𝛼+𝒊∙𝛽)∙𝑡 + 𝐵 ∙ 𝑒(𝛼−𝒊∙𝛽)∙𝑡
𝐼(𝑡) = 𝑒(𝛼)∙𝑡[𝐴 ∙ 𝑒(𝒊∙𝛽)∙𝑡 +𝐵 ∙ 𝑒(−𝒊∙𝛽)∙𝑡]
Utilizando a fórmula de Euler: 𝑒𝒊∙𝑥 = cos(𝑥) + 𝒊 ∙ 𝑠𝑒𝑛(𝑥)
𝐼(𝑡) = 𝑒(𝛼)∙𝑡[𝐴 ∙ [cos(𝛽 ∙ 𝑡) + 𝒊 ∙ sin(𝛽 ∙ 𝑡)] + 𝐵 ∙ [cos(−𝛽 ∙ 𝑡) + 𝒊 ∙ sin(−𝛽 ∙ 𝑡)]],
𝐼(𝑡) = 𝑒(𝛼)∙𝑡[𝐾1 ∙ [cos(𝛽 ∙ 𝑡)] + 𝐾2 ∙ [𝒊 ∙ sin(𝛽 ∙ 𝑡)]]
Regime Descendente 2:
C
R1
L
I
R2
Figura A2.3 – Regime descendente 2.
Sabendo que as impedâncias do Condensador e da resistência R2 são dadas por:
𝑍𝐶 =1
𝐶∙𝑠 e 𝑍𝑅2 = 𝑅2
Tem-se que o paralelo é dado por:
𝑍𝐶//𝑍𝑅 = 𝑅2
𝑅2∙𝐶∙𝑠+1
𝐿 ∙ 𝐼(𝑠) ∙ 𝑠 + 𝑅1 ∙ 𝐼(𝑠) +𝑅2
𝑅2 ∙ 𝐶 ∙ 𝑠 + 1𝐼(𝑠) = 0
↔ 𝐿 ∙ 𝑠 + 𝑅 +𝑅2
𝑅2 ∙ 𝐶 ∙ 𝑠 + 1= 0
↔ −𝑅2 = (𝑅2 ∙ 𝐶 ∙ 𝑠 + 1) ∙ (𝐿 ∙ 𝑠 + 𝑅1)
↔ −𝑅2 = 𝐿 ∙ 𝐶 ∙ 𝑅2 ∙ 𝑠2 + 𝑅1 ∙ 𝑅2 ∙ 𝐶 ∙ 𝑠 + 𝐿 ∙ 𝑠 + 𝑅1
↔ 𝐿 ∙ 𝐶 ∙ 𝑅2 ∙ 𝑠2 + (𝑅1 ∙ 𝑅2 ∙ 𝐶 + 𝐿) ∙ 𝑠 + 𝑅1 + 𝑅2 = 0
↔ 𝑠1,2 =−(𝑅1 ∙ 𝑅2 ∙ 𝐶 + 𝐿) ± √(𝑅1 ∙ 𝑅2 ∙ 𝐶 + 𝐿)
2 − 4 ∙ 𝐿 ∙ 𝐶 ∙ 𝑅2 ∙ (𝑅1 + 𝑅2)
2 ∙ 𝐿 ∙ 𝐶 ∙ 𝑅2
↔ 𝑠1,2 = −𝑅12 ∙ 𝐿
−1
2 ∙ 𝐶 ∙ 𝑅2±√
1
4(𝑅1𝐿)2
−1
𝐿 ∙ 𝐶+
𝑅12 ∙ 𝐿 ∙ 𝐶 ∙ 𝑅2
−𝑅1
𝐿 ∙ 𝐶 ∙ 𝑅2+
1
4 ∙ 𝐶2 ∙ 𝑅22

71
↔ 𝑠1,2 = −𝑅12 ∙ 𝐿
−1
2 ∙ 𝐶 ∙ 𝑅2±√
1
4(𝑅1𝐿)2
−1
𝐿 ∙ 𝐶−
𝑅12 ∙ 𝐿 ∙ 𝐶 ∙ 𝑅2
+1
4 ∙ 𝐶2 ∙ 𝑅22
Tal como na situação anterior a corrente vem dada por:
𝐼(𝑡) = 𝑒(𝛼)∙𝑡[𝐾1 ∙ [cos(𝛽 ∙ 𝑡)] + 𝐾2 ∙ [𝒊 ∙ sin(𝛽 ∙ 𝑡)]]
𝛼 = −𝑅12 ∙ 𝐿
−1
2 ∙ 𝐶 ∙ 𝑅2
𝛽 = √1
4(𝑅1𝐿)2
−1
𝐿 ∙ 𝐶−
𝑅12 ∙ 𝐿 ∙ 𝐶 ∙ 𝑅2
+1
4 ∙ 𝐶2 ∙ 𝑅22
Balanço de Potências
Potencia dissipadas:
𝑃𝑆,𝐷 = 𝑉𝑇 ∙ 𝐼𝑚𝑒𝑑 + 𝑟𝑇 ∙ 𝐼𝑒𝑓2
𝑃𝑅 = 𝑅 ∙ 𝐼2
-Regime Estacionário:
D1
S1
V1
C R2
D3
R1
L
Figura A2.4 – Circuito regime estacionário.
𝑃𝑐𝑜𝑛𝑠𝑢𝑚𝑖𝑑𝑎 = 𝑃𝑆1 + 𝑃𝐷1 + 𝑃𝑅1 + 𝑃𝐷3 + 𝑃𝑅2
𝑃𝑓𝑜𝑟𝑛𝑒𝑐𝑖𝑑𝑎 = 𝑃𝑉1

72
– Regime Ascendente:
D2
S2
V2
R1
L
Figura A2.5 – Circuito regime ascendente.
𝑃𝑐𝑜𝑛𝑠𝑢𝑚𝑖𝑑𝑎 = 𝑃𝑆2 + 𝑃𝐷2+𝑃𝑅1 + 𝑃𝐿
𝑃𝑓𝑜𝑟𝑛𝑒𝑐𝑖𝑑𝑎 = 𝑃𝑉2
– Regime Descendente:
R2
R1
LC
D3
Figura A2.6 – Circuito regime desscendente.
𝑃𝑐𝑜𝑛𝑠𝑢𝑚𝑖𝑑𝑎 = 𝑃𝑅1 + 𝑃𝑅2 + 𝑃𝐷3 + 𝑃𝐶 𝑃𝑓𝑜𝑟𝑛𝑒𝑐𝑖𝑑𝑎 = 𝑃𝐿

Anexo 3
Circuitos utilizados na simulação
Catálogos
Neste Anexo apresenta-se os circuitos utilizados para as simulações.

74
Figura A3. 1 – Esquema geral da simulação.

75
Figura A3. 2– Bloco do controlador PI.
Figura A3. 3 – Bloco de selecção e controlo dos IGBTs.