
AN1907 - Microchip...
27
2016 Microchip Technology Inc. DS00001907B_JP - p. 1 はじめに LAN9252 は 2/3 ポート EtherCAT ® スレーブ コントローラです。本製品は全二重 TX トランシーバを備え、 100 Mbps 動作 (100BASE-TX) をサポートする 2 つの Ethernet PHY を内蔵しています。 LAN9252 は HP Auto-MDIX に対応して おり、ストレートおよびクロスケーブルを使えます。外付けのファイバ トランシーバで 100BASE-FX にも対応します。 本製品は MII ポートを追加でき、3 ポートスレーブとして構成できます。このポートは、外部 PHY に接続して既存の デイジーチェーン間にタップを形成できます。また他の LAN9252 に接続して 4 ポート ソリューションを構成する事 もできます。 本書の目的は、Beckhoff 社 ET1100 から Microchip 社 LAN9252 への移行について説明する事です。 機能概要 LAN9252 EtherCAT モジュールは、4 KB DPRAM を備えた 3 ポート EtherCAT スレーブ コントローラ、4 つの SyncManager、3 つのフィールドバス メモリ管理ユニット (FMMU)、64 ビット Distributed Clock を実装しています。 各ポートは Ethernet フレームを受信し、フレームチェックを実行し、そのフレームを次のポートに転送します。受信 フレームのタイムスタンプは受信時に生成します。ポートにリンクがない、ポートが利用できない、またはそのポート に対してループが閉じている場合、各ポートはループバック機能で Ethernet フレームを次の論理ポートに転送します。 ポート 0 のループバック機能がフレームを EtherCAT 処理ユニットに転送します。ループの設定は EtherCAT マスタ で制御できます。 パケットは以下の順に転送されます。ポート 0 -> EtherCAT 処理ユニット -> ポート 1 -> ポート 2 EtherCAT 処理ユニット (EPU) は、EtherCAT データストリームを受信、解析、処理します。EtherCAT 処理ユニット の主な目的は、 EtherCAT スレーブ コントローラ (ESC) の内部レジスタとメモリ空間へのアクセスを制御する事です。 これらの内部レジスタとメモリ空間は、EtherCAT マスタとローカル アプリケーションの両方からアドレス指定でき ます。マスタ アプリケーションとスレーブ アプリケーションの間のデータ交換はデュアルポート メモリ ( プロセス メモリ ) と似ており、さらに整合性検証 (SyncManager)、データの割り当て (FMMU) といった拡張機能を備えています。 * EtherCAT ® は、ドイツ Beckhoff Automation GmbH 社の登録商標および特許技術です。 AN1907 Beckhoff 社 ET1100 から Microchip 社 LAN9252 への移行 著者 : Kansal Mariam Banu Shaick Ibrahim Microchip Technology Inc. 注意 : この日本語版文書は参考資料としてご利用ください。最新情報は必ずオリジ ナルの英語版をご参照願います。
Transcript of AN1907 - Microchip...

AN1907Beckhoff 社 ET1100 から Microchip 社 LAN9252 への移行
注意 : この日本語版文書は参考資料としてご利用ください。最新情報は必ずオリジナルの英語版をご参照願います。
はじめに
LAN9252 は 2/3 ポート EtherCAT® スレーブ コントローラです。本製品は全二重 TX トランシーバを備え、100 Mbps 動作 (100BASE-TX) をサポートする 2 つの Ethernet PHY を内蔵しています。LAN9252 は HP Auto-MDIX に対応して おり、ストレートおよびクロスケーブルを使えます。外付けのファイバ トランシーバで 100BASE-FX にも対応します。 本製品は MII ポートを追加でき、3 ポートスレーブとして構成できます。このポートは、外部 PHY に接続して既存のデイジーチェーン間にタップを形成できます。また他の LAN9252 に接続して 4 ポート ソリューションを構成する事 もできます。
本書の目的は、Beckhoff 社 ET1100 から Microchip 社 LAN9252 への移行について説明する事です。
機能概要
LAN9252 EtherCAT モジュールは、4 KB DPRAM を備えた 3 ポート EtherCAT スレーブ コントローラ、4 つの SyncManager、3 つのフィールドバス メモリ管理ユニット (FMMU)、64 ビット Distributed Clock を実装しています。
各ポートは Ethernet フレームを受信し、フレームチェックを実行し、そのフレームを次のポートに転送します。受信フレームのタイムスタンプは受信時に生成します。ポートにリンクがない、ポートが利用できない、またはそのポートに対してループが閉じている場合、各ポートはループバック機能で Ethernet フレームを次の論理ポートに転送します。ポート 0 のループバック機能がフレームを EtherCAT 処理ユニットに転送します。ループの設定は EtherCAT マスタで制御できます。
パケットは以下の順に転送されます。ポート 0 -> EtherCAT 処理ユニット -> ポート 1 -> ポート 2EtherCAT 処理ユニット (EPU) は、EtherCAT データストリームを受信、解析、処理します。EtherCAT 処理ユニットの主な目的は、EtherCAT スレーブ コントローラ (ESC) の内部レジスタとメモリ空間へのアクセスを制御する事です。 これらの内部レジスタとメモリ空間は、EtherCAT マスタとローカル アプリケーションの両方からアドレス指定でき ます。マスタ アプリケーションとスレーブ アプリケーションの間のデータ交換はデュアルポート メモリ ( プロセス メモリ )と似ており、さらに整合性検証 (SyncManager)、データの割り当て (FMMU)といった拡張機能を備えています。
* EtherCAT® は、ドイツ Beckhoff Automation GmbH 社の登録商標および特許技術です。
著者 : Kansal Mariam Banu Shaick IbrahimMicrochip Technology Inc.
2016 Microchip Technology Inc. DS00001907B_JP - p. 1

AN1907
1.0 ハードウェアの移行
図 1 に、ET1100 から LAN9252 へのアプリケーション レベルのハードウェアの移行を示します。表 1 に、ESC 機能 の相違点をまとめます。比較のため、ET1100 と LAN9252 の機能レベルのブロック図を図 2 と図 3 に示します。
図 1: ET1100 から LAN9252 へのアプリケーションの移行
表 1: 主な ESC 機能の比較
機能 ET1100 LAN9252
ポート 2 ~ 4( 各 EBUS/MII) 2 x 内蔵 PHY1 x MII
FMMU 8 3SyncManager 8 4
RAM (KB) 8 4Distributed Clock 64 ビット 64 ビット
プロセスデータ インターフェイス
デジタル I/O 32 ビット 16 ビット
通常モードの SPI スレーブ (SPICLK ≦ 30 MHz) サポート (SPICLK ≦ 20 MHz) サポート (SPICLK ≦ 30 MHz)高速モードの SPI スレーブ (SPICLK ≦ 80 MHz) - サポート
デュアル / クワッド SPI スレーブ (SPICLK ≦ 80 MHz) - サポート SQI SPI スレーブ (SPICLK ≦ 80 MHz) - サポート
8/16 ビットノンマルチプレクス バス インターフェイス 同期 / 非同期バス 非同期バス
8/16 ビット マルチプレクス バス インターフェイス - 非同期バス
DS00001907B_JP - p. 2 2016 Microchip Technology Inc.

AN1907
図 2: ET1100 ESC のブロック図
図 3: LAN9252 ESC のブロック図
2016 Microchip Technology Inc. DS00001907B_JP - p. 3

AN1907
以下のセクションでは、LAN9252 の特長を説明します。1.1 EtherCAT CSR とプロセスデータ RAM のアクセス
EtherCAT CSR を使うと、EtherCAT コアの各種パラメータにレジスタレベルでアクセスできます。EtherCAT に関係 するレジスタは、アクセス方法に基づいて主に 2 つのカテゴリ、つまり直接と間接に分類できます。
直接アクセス EtherCAT レジスタは、メインシステム CSR に属します。これらのレジスタはデータ / コマンドレジスタとして間接 EtherCAT コアレジスタへのアクセスに使います。
間接アクセス EtherCAT コアレジスタは EtherCAT コア内部にあるため、EtherCAT CSR インターフェイス データ レジスタ (ECAT_CSR_DATA) および EtherCAT CSR インターフェイス コマンドレジスタ (ECAT_CSR_CMD) 経由で アクセスする必要があります。間接アクセス EtherCAT コア CSR を使うと、EtherCAT コアの各種設定可能パラメータ全てにアクセスできます。
1000h から始まる EtherCAT コア プロセスデータ RAM は、EtherCAT CSR インターフェイス データレジスタ (ECAT_CSR_DATA) および EtherCAT CSR インターフェイス コマンドレジスタ (ECAT_CSR_CMD) 経由で間接的に アクセスできます。EtherCAT コア プロセスデータ RAM は、EtherCAT プロセス RAM 読み出しデータ FIFO (ECAT_PRAM_RD_DATA) と EtherCAT プロセス RAM 読み出しコマンドレジスタ (ECAT_PRAM_RD_CMD) を使う事で、さらに効率的にアクセスできます。
1.2 内蔵 PHY本製品は自動ネゴシエーションと HP Auto-MDIX に対応する IEEE 802.3 PHY を 2 個内蔵し、100 Mbps 銅線 (100BASE-TX) または 100 Mbps ファイバ (100BASE-FX) で動作するように設定できます。
機能的には、各 PHY は以下のように区分できます。
• 100BASE-TX 送信と 100BASE-TX 受信
• 自動ネゴシエーション
• HP Auto-MDIX• PHY 管理制御と PHY 割り込み
• PHY パワーダウン モード
• リセット
• リンク インテグリティ テスト
• ケーブル診断
• ループバック動作
• 100BASE-FX 遠端エラー表示
図 4 に物理 PHY の主な機能ブロックを示します。
図 4: LAN9252 PHY のブロック図
HP Auto-MDIX
TXPx/TXNx
RXPx/RXNxTo External Port x Ethernet Pins
100Transmitter
100 Reciever
MIIMAC
Interface
MII
MDIO
Auto-Negotiation
To Port x EtherCAT MAC
To EtherCAT core PLL
PHY ManagementControl
Registers
FromSystem Clocks Controller
Interrupts
To System Interrupt Controller
DS00001907B_JP - p. 4 2016 Microchip Technology Inc.

AN1907
スター型またはツリー型ネットワーク トポロジに対応するため、本製品は MII ポートを追加でき、3 ポートスレーブ として構成できます。このポートは外部 PHY に接続できます。既定値では、内蔵 PHY は 100 Mbps、全二重動作に設定されています。自動ネゴシエーションは 100BASE-TX モード では有効、100BASE-FX モードでは無効です。また EtherCAT コアは必要に応じて設定をチェック、更新します。
既定値では、外部 PHY は 100 Mbps、自動ネゴシエーション有効、全二重動作に設定する必要があります。EtherCAT コアは必要に応じて設定をチェック、更新します。
1.3 チップモード
LAN9252 は以下のチップモードをサポートします。
• 2 ポートモード : ポート 0、1 を内蔵 PHY A、B に接続する。
• 3 ポート ダウンストリーム モード : ポート 0、1 を内蔵 PHY A、B に接続し、ポート 2 を外部 MII ピンに接続する。
• 3 ポート アップストリーム モード : ポート 2、1 を内蔵 PHY A、B に接続し、ポート 0 を外部 MII ピンに接続する。
表 2 に示すように、これらのモードは CHIP_MODE1 と CHIP_MODE0 の EtherCAT チップモード ストラップで選択 します。
表 2: Chip_Mode[1:0] の設定
1.4 プロセスデータ インターフェイス (PDI)以下のセクションでは、ET1100 から LAN9252 へのハードウェアとソフトウェアの移行の詳細を説明します。
表 3 に、ET1100 と LAN9252 の PDI の比較を示します。
CHIP_MODE1 CHIP_MODE0 モード
0 0 2 ポートモード
0 1 予約済み
1 0 3 ポート ダウンストリーム モード
1 1 3 ポート アップストリーム モード
表 3: PDI の比較
PDI タイプ ET1100 LAN9252
デジタル I/O インターフェイス 32 の設定可能デジタル I/O をサポート 16 の設定可能デジタル I/O をサポート
SPI( 通常 R/W) サポート(4 線、SPI クロック最大 20 MHz)
サポート(4 線、SPI クロック最大 30 MHz)
SPI( 高速 R/W) サポートせず サポート(4 線、SPI クロック最大 80 MHz)
SPI( デュアル /クワッドデータ R/W)
サポートせず サポート (4 または 6 線、SPI クロック最大 80 MHz)
SPI( デュアル /クワッドアドレス / データ R/W)
サポートせず サポート (4 または 6 線、SPI クロック最大 80 MHz)
SQI R/W サポートせず サポート(6 線、SPI クロック最大 80 MHz)
非同期マルチプレクス アドレス /データバス インターフェイス
サポートせず HBI マルチプレクス単相 8 ビットをサポート
HBI マルチプレクス単相 16 ビットをサポート
HBI マルチプレクス 2 相 8 ビットをサポート
HBI マルチプレクス 2 相 16 ビットをサポート
2016 Microchip Technology Inc. DS00001907B_JP - p. 5

AN1907
1.4.1 デジタル I/O PDI
1.4.1.1 ハードウェアの移行
デジタル I/O PDI の ET1100 から LAN9252 への移行では、以下の事項に注意する必要があります。
1. 設定可能デジタル I/O 数は 32 から 16 に減少します。
2. EEPROM_LOADED ピン機能は、LAN9252 では使えません。 a) ET1100 の EEPROM_LOADED は、PDI が使える事を示します。
b) ET1100 の EEPROM_LOADED は、PDI では任意です。
3. OE_CONF ピン機能は、LAN9252 では使えません。従って、出力ドライバは OE_EXT でのみ有効になります。
a) 出力イネーブル信号 OE_EXT を Low に設定した場合、または SyncManager のウォッチドッグがタイムアウトした場合、ET1100 の OE_CONF が出力ドライバの挙動を制御します。
b) 双方向モードでは ET1100 の OE_CONF は無視されます。OE_EXT が Low の場合、またはウォッチドッグがタイムアウトした場合、出力イベント中 I/O は Low に駆動されます。
図 5 に、デジタル I/O PDI モードの ET1100 から LAN9252 へのハードウェアの移行を示します。
1.4.2 同期ノンマルチプレクス バス インターフェイス
同期ノンマルチプレクス 8/16 ビット PDI は ET1100 でのみサポートされています。LAN9252 は同期 8/16 ビットインターフェイスをサポートしていません。 従って、ユーザは以下のセクションで説明する代わりの PDI( 例 : 非同期 8/16 ビット マルチプレクス インターフェイス、 非同期 8/16 ビット ノンマルチプレクス インターフェイス、SPI/SQI) を選択する必要があります。
非同期ノンマルチプレクス アドレス /データバス インターフェイス
8 ビット マイクロコントローラ インターフェイスをサポート
HBI インデックス付き 8 ビットをサポート
16 ビット マイクロコントローラ インターフェイスをサポート
HBI インデックス付き 16 ビットをサポート
同期 ノンマルチプレクス アドレス /データバス インターフェイス
8 ビット マイクロコントローラ インターフェイスをサポート
サポートせず
16 ビット マイクロコントローラ インターフェイスをサポート
サポートせず
図 5: デジタル I/O PDI の移行
表 3: PDI の比較 ( 続き )PDI タイプ ET1100 LAN9252
ET1100
I/O[31:0]LATCH_IN
OUTVALID
SOF
OE_EXT
OE_CONF
WD_TRIG
EEPROM_LOADED
LAN9252
I/O[15:0]LATCH_IN
OUTVALID
SOF
OE_EXT
EOF
WD_TRIG
EOFTransition
DS00001907B_JP - p. 6 2016 Microchip Technology Inc.
AN1907
1.4.3 非同期 ノンマルチプレクス バス インターフェイス1.4.3.1 ハードウェアの移行
非同期ノンマルチプレクス バス インターフェイスの ET1100 から LAN9252 への移行では、ハードウェアに関して 以下の事に注意する必要があります。
1. 8 ビット マイクロコントローラ インターフェイス
a) ET1100 の非同期 8 ビット コントローラ インターフェイスは、LAN9252 の HBI インデックス付き 8 ビット モードに直接置き換える事ができます。
b) アドレスライン数は 16 から 5 に減少します。LAN9252 はインデックス付きアドレス指定モードを使い、インデックス レジスタと CSR/FIFO で ECAT レジスタを間接的にアクセスできるためです。
2. 16 ビット マイクロコントローラ インターフェイス
a) ET1100 の非同期 16 ビット コントローラ インターフェイスは、LAN9252 の HBI インデックス付き 16 ビット モードに直接置き換える事ができます。
b) アドレスライン数は 15 から 4 に減少します。LAN9252 はインデックス付きアドレス指定モードを使い、インデックス レジスタと CSR/FIFO で ECAT レジスタを間接的にアクセスできるためです。
c) LAN9252 の A[0] は、16 ビット インデックス モードでは無視されます。
3. EEPROM_LOADED ピン機能は、LAN9252 では使えません。 a) ET1100 の EEPROM_LOADED は、PDI が使える事を示します。
b) ET1100 の EEPROM_LOADED は、PDI では任意です。
2016 Microchip Technology Inc. DS00001907B_JP - p. 7

AN1907
図 6 に、8 ビット非同期インターフェイスの ET1100 から LAN9252 へのハードウェアの移行を示します。図 6: 8 ビット非同期バス インターフェイスの移行
uController(async)
LAN9252(IndexedMode)
A[4:0]
WR
RD
CS
D[7:0]
Inte
rrup
tsAs
ync 8
bit b
us In
terfa
ce
SYNC0SYNC1
IRQ
LAN9252 : HBI Indexed Mode 8-bit
ET1100 : Async non-multiplexed interface 8-bit
ET1100
Transition
DS00001907B_JP - p. 8 2016 Microchip Technology Inc.

AN1907
図 7 に、16 ビット非同期インターフェイスの ET1100 から LAN9252 へのハードウェアの移行を示します。図 7: 16 ビット非同期バス インターフェイスの移行
ET1100 : Async non-multiplexed interface 16-bit
ET1100
uController(async)
LAN9252(IndexedMode)
A[4:1]
WR
RD
CS
D[15:0]
Inte
rrup
tsAs
ync 8
bit b
us In
terfa
ce
SYNC0SYNC1
IRQ
LAN9252 : HBI Indexed Mode 16-bit
Transition
2016 Microchip Technology Inc. DS00001907B_JP - p. 9

AN1907
1.4.3.2 ソフトウェアの移行
非同期ノンマルチプレクス バス インターフェイスの ET1100 から LAN9252 への移行では、ソフトウェアにおいて 以下の事項に注意する必要があります。
1. PDI 制御レジスタ「0x0140」の PDI タイプ値は、ET1100 と LAN9252 で異なります。 a) 8 ビット非同期マイクロコントローラ インターフェイス
ET1100 の PDI タイプ = 0X09hLAN9252 の PDI タイプ = 0X8Ch
b) 16 ビット非同期マイクロコントローラ インターフェイス ET1100 の PDI タイプ = 0X08hLAN9252 の PDI タイプ = 0X8Dh
2. アドレス指定モードの移行 :a) ET1100 は直接アクセスモードを使用
これにより、間に FIFO を使わず、ホストから EtherCAT コアレジスタに直接アクセスできます。
ホストは EtherCAT コアレジスタに直接アクセスするために、16 本のアドレスライン ADR[15:0] (8 ビットモードの
場合 ) または 15 本のアドレスライン ADR[15:1] (16 ビットモードの場合 ) で EtherCAT レジスタアドレスを送る
必要があります。
b) LAN9252 は間接アクセスモードを使用
これにより、システム CSR、内蔵 FIFO、メモリにアクセスできます。
ECAT 制御およびステータス レジスタ ( アドレスレンジ 0000h ~ 0FFFh) は、CSR レジスタで間接的にアクセス
できます。 ECAT プロセス RAM( アドレスレンジ 1000h ~ 1FFFh) は、16 段 32 ビット幅の FIFO で間接的にアクセスできます。
ホストは EtherCAT コアレジスタに間接的にアクセスするために、5 本のアドレスライン A[4:0] (8 ビットモードの場合 ) または 4 本のアドレスライン A[4:1] (16 ビットモードの場合 )でインデックス レジスタアドレスを送る必要があ
ります。 インデックス付きアドレス指定モードは以下のセクションで説明します。
1.4.3.2.1 LAN9252: インデックス付きアドレスモード
インデックス付きアドレスモードでは、デバイスの内部レジスタおよびメモリへのアクセスはインデックスおよびデータレジスタで間接的に割り当てられます。必要な内部アドレスは特定のオフセットでデバイスに書き込まれます。対応するデータレジスタのアドレスがアクセスされると、書き込み済みの値が内部アドレスとして使われます。3 つのインデックス / データレジスタ セットを備えているため、マルチスレッド動作が可能であり、あるスレッドが別の スレッドによってセットされたインデックスを破損させる心配はありません。インデックス / データペアごとにエンディアンを設定できます。FIFO へのアクセスには、別のデータレジスタを備えています。
表 4、「ホストバス インターフェイスのインデックス付きアドレスモードのレジスタマップ」に、ホストアドレスの レジスタマップを示します。8 ビットデータ モードでは、ホストアドレス入力 (A[4:0]) はバイトアドレスです。 16 ビットデータ モードでは、ADDR0 は備えておらず、ホストアドレス入力 (A[4:1]) はワードアドレスです。
EtherCAT プロセス RAM は FIFO で直接アクセスでき、アドレス 18h ~ 1Bh を読み書きする事で FIFO にアクセスできます。 タイミング図の詳細は LAN9252 データシート「DS00001909A」を参照してください。
表 4: ホストバス インターフェイスのインデックス付きアドレスモードのレジスタマップ
バイトアドレス 記号 レジスタ名
00h ~ 03h HBI_IDX_0 ホストバス インターフェイス インデックス レジスタ 004h ~ 07h HBI_DATA_0 ホストバス インターフェイス データレジスタ 008h ~ 0Bh HBI_IDX_1 ホストバス インターフェイス インデックス レジスタ 10Ch ~ 0Fh HBI_DATA_1 ホストバス インターフェイス データレジスタ 110h ~ 13h HBI_IDX_2 ホストバス インターフェイス インデックス レジスタ 214h ~ 17h HBI_DATA_2 ホストバス インターフェイス データレジスタ 218h ~ 1Bh PROCESS_RAM_FIFO プロセス RAM 書き込みデータ FIFO
プロセス RAM 読み出しデータ FIFO1Ch ~ 1Fh HBI_CFG ホストバス インターフェイス コンフィグレーション レジスタ
DS00001907B_JP - p. 10 2016 Microchip Technology Inc.

AN1907
1.4.4 SPI スレーブ インターフェイス1.4.4.1 ハードウェアの移行
SPI スレーブ インターフェイスの ET1100 から LAN9252 への移行では、ハードウェアにおいて以下の事項に注意す る必要があります。
1. EEPROM_LOADED ピン機能は、LAN9252 では使えません。 a) ET1100 の EEPROM_LOADED は、PDI が使える事を示します。
b) ET1100 の EEPROM_LOADED は、PDI では任意です。
2. ET1100 の SPI_IRQ は LAN9252 の IRQ 信号に置き換わります。SPI 割り込みはソフトウェアで内部的に IRQ に割り当てる事ができます。
3. LAN9252 を SPI モードに設定した場合、 a) 16 の GPIO が追加で提供されます ( チップモード選択を 2 ポートモードに設定した場合 )。b) 第 3 のネットワーク ポートを有効にして MII ポートを追加できます ( チップモード選択を 3 ポートモードに
設定した場合 )。c) 以下のセクションでは、上述の 2 つのモードについて説明します。
4. LAN9252 が提供するその他の SPI 機能
a) LAN9252 は、以下に示すその他の SPI PDI タイプをサポートします。これらは ET1100 ではサポートされて いません。
デュアル / クワッド SPI( 最大 80 MHz の読み書き )SQI( 最大 80 MHz の読み出し / 書き込み )
b) これらの機能の 1 つを選択すると、SPI アクセス時間を低減しスループット性能を向上させる事ができます。
c) SPI 命令を使うと、各種 SPI モードと読み書き動作を制御できます。
2016 Microchip Technology Inc. DS00001907B_JP - p. 11

AN1907
図 8 に、SPI スレーブ インターフェイスの ET1100 から LAN9252 へのハードウェアの移行を示します。図 8: SPI スレーブ インターフェイスの移行
SPI MASTER(uController)
LAN9252(SPI SLAVE)
SCS_NSCK
SI (SIO0)SO (SIO1)
LAN9252 : SPI Interface
SIO2SIO3NC
SPI
Inte
rrup
ts SYNC0SYNC1
IRQ
ET1100 : SPI Interface
Transition
DS00001907B_JP - p. 12 2016 Microchip Technology Inc.

AN1907
1.4.4.1.1 LAN9252: SPI + GPIOLAN9252 を SPI モードに設定している場合も、16 の GPIO が追加されます ( 図 9 に示すようにチップモード選択を2 ポートモードに設定した場合 )。
Note: チップモード選択については、本書の「チップモード」のセクションで説明しています。
図 9: LAN9252 の PDI (SPI + 16 GPIO)
2016 Microchip Technology Inc. DS00001907B_JP - p. 13

AN1907
1.4.4.1.2 LAN9252: 拡張モード (SPI + MII)LAN9252 を SPI モードに設定している場合、第 3 のネットワーク ポートを有効にして MII ポートを追加できます ( 図 10 に示すようにチップモード選択を 3 ポートモードに設定した場合 )。このポートは外部 PHY に接続して、スター型またはツリー型ネットワーク トポロジを構成できます。または、他の LAN9252 に接続して 4 ポート ソリューションを構成できます。このポートはアップストリームとダウンストリーム のどちらにも設定できます。1.4.4.2 ソフトウェアの移行
SPI スレーブ インターフェイスの ET1100 から LAN9252 への移行では、ソフトウェアにおいて以下の事項に注意する 必要があります。
1. PDI 制御レジスタ「0x0140」の PDI タイプ値は、ET1100 と LAN9252 で異なります。 a) ET1100 の PDI タイプ = 0X05b) LAN9252 の PDI タイプ = 0X80
2. EtherCAT コアレジスタ アクセスモードの移行 :a) ET1100 は直接アクセスモードを使用
これにより、間に FIFO を使わず、ホストから EtherCAT コアレジスタに直接アクセスできます。
b) LAN9252 は間接アクセスモードを使用 これにより、システム CSR、内蔵 FIFO、メモリにアクセスできます。
ECAT 制御およびステータス レジスタ ( アドレスレンジ 0000h ~ 0FFFh) は、CSR レジスタで間接的にアクセス
できます。 ECAT プロセス RAM( アドレスレンジ 1000h ~ 1FFFh) は、16 段 32 ビット幅の FIFO で間接的にアクセスできます。
3. 間接アクセスモードのため、LAN9252 は ET1100 に対して以下のフローチャートに示すような追加の手順を必要とします。
Note: チップモード選択については、本書の「チップモード」のセクションで説明しています。
図 10: LAN9252 の PDI (SPI + MII)
DS00001907B_JP - p. 14 2016 Microchip Technology Inc.

AN1907
図 11 に、SPI スレーブ インターフェイス経由の制御およびステータス レジスタ読み出しアクセスの、ET1100 から LAN9252 へのソフトウェアの移行を示します。図 11: SPI 経由 ECAT 制御およびステータス レジスタ読み出しアクセスの ET1100 から LAN9252 への移行
Write in CSR_CMDSet addr
Set Length (max 4 bytes)Set b30 = 1Set b31 = 1
CSR_CMD.31 = 0 ?
START
Read CSR_Data 4 Bytes(max 4 bytes)
YES
YES
CMDbyte0
adrbyte1
adrbyte2
Data (4byte)Byte3..6
Set Adr = 304h
Set Address, Length,b30 = Read and B31 = CSR busy
NO CMDbyte0
adrbyte1
adrbyte2
Data (4byte)Byte3..6
Set Adr = 304h
Read CSR_CMD.31 = 0
Single register Write method
Single register Read method
CMDbyte0
adrbyte1
adrbyte2
Data (4byte)Byte3..6
Set Adr = 300h
Read 4 byte
Single register Read method
LAN9252 : EtherCAT Control/Status registers Read
START
adr
byte0
cmd
byte1
adr Data
Byte3..FFh
ET1100 : EtherCAT Control/Status registers Read
Transition
Note:CSRCMD : EtherCAT CSR interface Command Register (Address = 304h)CSR_DATA = EtherCAT CSR interface Data register (Address = 300h)
CSRCMD: EtherCAT CSR インターフェイス コマンドレジスタ
( アドレス = 304h)CSR_DATA = EtherCAT CSR インターフェイス データレジスタ
( アドレス = 300h)
2016 Microchip Technology Inc. DS00001907B_JP - p. 15

AN1907
図 12 に、SPI スレーブ インターフェイス経由の制御およびステータス レジスタ書き込みアクセスの ET1100 から LAN9252 へのソフトウェアの移行を示します。
図 12: SPI 経由 ECAT 制御およびステータス レジスタ書き込みアクセスの ET1100 から LAN9252 への移行
Write in CSR_CMDSet addr
Set Length (max 4 bytes)Set b30 = 1Set b31 = 1
CSR_CMD.31 = 0 ?
START
Write CSR_Data 4 Bytes(max 4 bytes)
CMDbyte0
adrbyte1
adrbyte2
Data (4byte)Byte3..6
Set Adr = 304h
Set Address, Length,b30 = Read and B31 = CSR busy
YES CMDbyte0
adrbyte1
adrbyte2
Data (4byte)Byte3..6
Set Adr = 304h
Read CSR_CMD.31 = 0Check CSR Busy
is cleared
Single register Write method
Single register Read method
CMDbyte0
adrbyte1
adrbyte2
Data (4byte)Byte3..6
Set Adr = 300h
Read 4 byte
Single register Read method
LAN9252 : EtherCAT Control/Status registers Write
START
adr
byte0
cmd
byte1
adr Data
Byte3..FFh
ET1100 : EtherCAT Control/Status registers Write
Transition
Note:CSRCMD : EtherCAT CSR interface Command Register (Address = 304h)CSR_DATA = EtherCAT CSR interface Data register (Address = 300h)
Min wait period
CSRCMD: EtherCAT CSR インターフェイス コマンドレジスタ
( アドレス = 304h)CSR_DATA = EtherCAT CSR インターフェイス データレジスタ
( アドレス = 300h)
DS00001907B_JP - p. 16 2016 Microchip Technology Inc.

AN1907
図 13 に、SPI スレーブ インターフェイス経由のプロセス RAM 読み出しアクセスの、ET1100 から LAN9252 への ソフトウェアの移行を示します ( 例 : SPI 経由の 6 バイトのプロセスデータの読み出し )。
図 13: SPI 経由 ECAT プロセス RAM 読み出しアクセスの ET1100 から LAN9252 への移行
Set R_ADR_LEN = Length + Address
Set RCMD.31 = 1
RCMD.0=1RCMD.12:8 >= 2
START
Read Data 6 Bytes(max 64 bytes)
YES
YES
CMDbyte0
adrbyte1
adrbyte2
Data (4byte)Byte3..6
Data (4byte)Byte7..10
Set Adr = 308h
Set Length + Address
Set RCMD.31 = 1
NO CMDbyte0
adrbyte1
adrbyte2
Data (4byte)Byte3..6
Set Adr = 30Ch
Read RCMD.0=1
RCMD.12:8 >= 2
Multiple register write method
Single register Read method
CMDbyte0
adrbyte1
adrbyte2
Data (4byte)Byte3..6
Data (4byte)Byte7..10
Set Adr = 00h Read
First 4 byte
Multiple register Read method
Read Second 4 byte
LAN9252 : EtherCAT Process RAM Read
START
adr
byte0
cmd
byte1
adr Data
Byte3..FFh
ET1100 : EtherCAT Process RAM Read
Transition
Note1:RCMD : EtherCAT Process RAM Read Command Register (Address = 30Ch)R_ADR_LEN = EtherCAT Process RAM Read Address and Length Register (Address = 308h)
Note2: If the delay after setting RCMD.31 = 1 is higher than minimum wait period, then verifying (RCMD.0 =1 RCMD.12:8 >= 2) is not required (Assuming FIFO has valid data to Read) and this step can be bypassed. This will reduce SPI access time
See Note 2
Note1:RCMD: EtherCAT プロセス RAM 読み出しコマンドレジスタ ( アドレス = 30Ch)R_ADR_LEN = EtherCAT プロセス RAM 読み出しアドレスおよび長さレジスタ ( アドレス = 308h)
Note2: RCMD.31 = 1 を設定した後の遅延が最小待機期間より長い場合、「RCMD.0 = 1 RCMD.12:8 ≧ 2」の
検証は不要であり ( 有効な読み出しデータが FIFO にあると見なして )、この手順は省略できます。これ
により、SPI アクセス時間は減少します。
2016 Microchip Technology Inc. DS00001907B_JP - p. 17

AN1907
図 14 に、SPI スレーブ インターフェイス経由のプロセス RAM 書き込みアクセスの、ET1100 から LAN9252 への ソフトウェアの移行を示します ( 例 : SPI 経由の 16 バイトのプロセスデータの書き込み )。
1.4.5 非同期マルチプレクス バス インターフェイス
LAN9252は、非同期マルチプレクス8/16ビットPDIもサポートします。これらはET1100ではサポートされていません。 従って、ホストがサポートしている場合、ユーザは以下に示す PDI のいずれか 1 つを選択する事もできます。 1. 8 ビット マルチプレクス HBI モード ( 単相 )2. 16 ビット マルチプレクス HBI モード ( 単相 )3. 8 ビット マルチプレクス HBI モード (2 相 )4. 16 ビット マルチプレクス HBI モード (2 相 )
図 14: SPI 経由 ECAT プロセス RAM 書き込みアクセスの ET1100 から LAN9252 への移行
Set W_ADR_LEN = Length + AddressSet WCMD.31 = 1
START
Write Data 16 Bytes(max 64 bytes)
CMDbyte0
adrbyte1
adrbyte2
Data (4byte)Byte3..6
Data (4byte)Byte7..10
Set Adr = 308h
Set Length + Address
Set WCMD.31 = 1
Multiple register write method
CMDbyte0
adrbyte1
adrbyte2
Data (4byte)Byte3..6
Data (4byte)Byte7..10
Set Adr = 020h
Write First 4 byte
Multiple register Write method
Write Second 4 byte
Data (4byte)Byte11..14
Data (4byte)Byte15..18
Write Third 4 byte
Write Fourth 4 byte
LAN9252 : Process RAM WRITE
START
adrbyte0
cmd
byte1
adr DataByte3..FFh
ET1100 : Process RAM Write
Transition
Note1:WCMD : EtherCAT Process RAM Write Command Register (Address = 314h)W_ADR_LEN = EtherCAT Process RAM Write Address and Length Register (Address = 310h)
Note1:WCMD: EtherCAT プロセス RAM 書き込みコマンドレジスタ ( アドレス = 314h)W_ADD_LEN = Ether CAT プロセス RAM 書き込みアドレスおよび長さレジスタ ( アドレス = 310h)
DS00001907B_JP - p. 18 2016 Microchip Technology Inc.

AN1907
図 15に、各種マルチプレクスHBIモードでのマイクロコントローラと LAN9252の間のハードウェア接続を示します。1.4.6 デュアル / クワッド SPI および SQI スレーブ インターフェイス
LAN9252 は、高速 ( 最大 80 MHz) のデュアル / クワッド SPI と SQI もサポートしています。これらは ET1100 では サポートされていません。
従って、ホストがサポートしている場合、ユーザは以下に示す SPI PDI のいずれか 1 つを選択する事もできます。 これにより、高い SPI 周波数とデータ共有に使う SPI ライン数 ( デュアル SPI には 2 ライン、クワッド SPI と SQI には 4 ライン ) に基づいて、SPI アクセス時間を低減します。 1. 高速 SPI2. デュアル出力またはデュアル入出力 SPI3. クワッド出力またはクワッド入出力 SPI4. SQI
図 15: 各種マルチプレクス HBI モードでの LAN9252 のハードウェア接続
8-bit Multiplexed HBI mode: 1 Phase
uController(async) LAN9252
AD[15:0]
WR
16-bit Multiplexed HBI mode : 1 Phase
RD
CS ALELO
ALEHI
Note: The POLARITY of WR, RD, CS, ALELO and ALEHI can be CONTROLLED
uController(async) LAN9252
AD[15:0]
WR
RD
CS ALELO
ALEHI
8-bit Multiplexed HBI mode: 2 Phase
uController(async) LAN9252
AD[15:0]
WR
16-bit Multiplexed HBI mode : 2 Phase
RD
CS ALELO ALEHI
uController(async) LAN9252
AD[7:0]
WR
RD
CS ALELO ALEHI
SYNC0SYNC1IRQ
SYNC0SYNC1IRQ
SYNC0SYNC1IRQ
SYNC0SYNC1IRQ
Inte
rrup
tsIn
terr
upts
Inte
rrup
tsIn
terr
upts
Note: WR、RD、CS、ALELO、ALEHI の極性は変更できます。
2016 Microchip Technology Inc. DS00001907B_JP - p. 19

AN1907
図 16 に、各種 SPI モードでのマイクロコントローラと LAN9252 の間のハードウェア接続を示します。図 16: 各種 SPI モードでの LAN9252 のハードウェア接続
SPI MASTER(uController)
SPI SLAVE(LAN9252)
SCS_NSCK
SI (SIO0)SO (SIO1)
Normal and FAST READ/WRITE
SQI,QUAD O/p and QUAD I/O READ/WRITE
SIO2SIO3NC
SPI MASTER(uController)
SPI SLAVE(LAN9252)
SCS_NSCK
SIO2SIO3
SIO0SIO1
DUAL O/P and DUAL I/O READ/WRITE
SPI MASTER(uController)
SPI SLAVE(LAN9252)
SCS_NSCKSIO0SIO1
SIO2SIO3NC
Interr
upts
SYNC0SYNC1
IRQ
Interr
upts
SYNC0SYNC1
IRQ
Interr
upts
SYNC0SYNC1
IRQ
DS00001907B_JP - p. 20 2016 Microchip Technology Inc.

AN1907
2.0 ソフトウェアの移行
本セクションでは、プロセスデータ インターフェイス (PDI) に関するソフトウェアの移行について説明します。
EtherCAT スレーブスタック アーキテクチャは効果的に抽象化されているため、ET1100 から LAN9252 へのファーム ウェアの移植は簡単です。HAL (Hardware Abstraction Layer) は、EtherCAT スタックのミドルウェアとアプリケー ション層へのフック (API) を備えています。これによりハードウェアの変更をカプセル化し、各種ハードウェアプラットフォームへのアプリケーションの移植に要する工数を削減します。そのため、LAN9252 特有の修正を HALに加えるだけで、アプリケーションは ET1100 を使った場合と同じように動作します。 PIC32 ユーザの場合 :LAN9252 の HAL の変更の詳細は『Microchip 社 LAN9252 SDK と Beckhoff 社 EtherCAT SSC の統合』(AN1916) を参照 してください。
その他の SoC ユーザの場合 :LAN9252 の HAL を変更するには、LAN9252 のデータシートを参照してください。
2.1 スレーブ コンフィグレーション ヘッダ (ecat_def.h)定義済みハードウェア設定の一覧は ecat_def.h ヘッダファイル内にあります。このファイルに以下の変更を加える必要があります。
1. 図 17 に示すように、LAN9252 の仕様に従ってメールボックスと PDRAM 読み書きサイズを変更する必要があります。
図 17: ecat_def.h の編集 ( メールボックスと PDRAM 読み書きサイズの変更 )
2016 Microchip Technology Inc. DS00001907B_JP - p. 21
AN1907
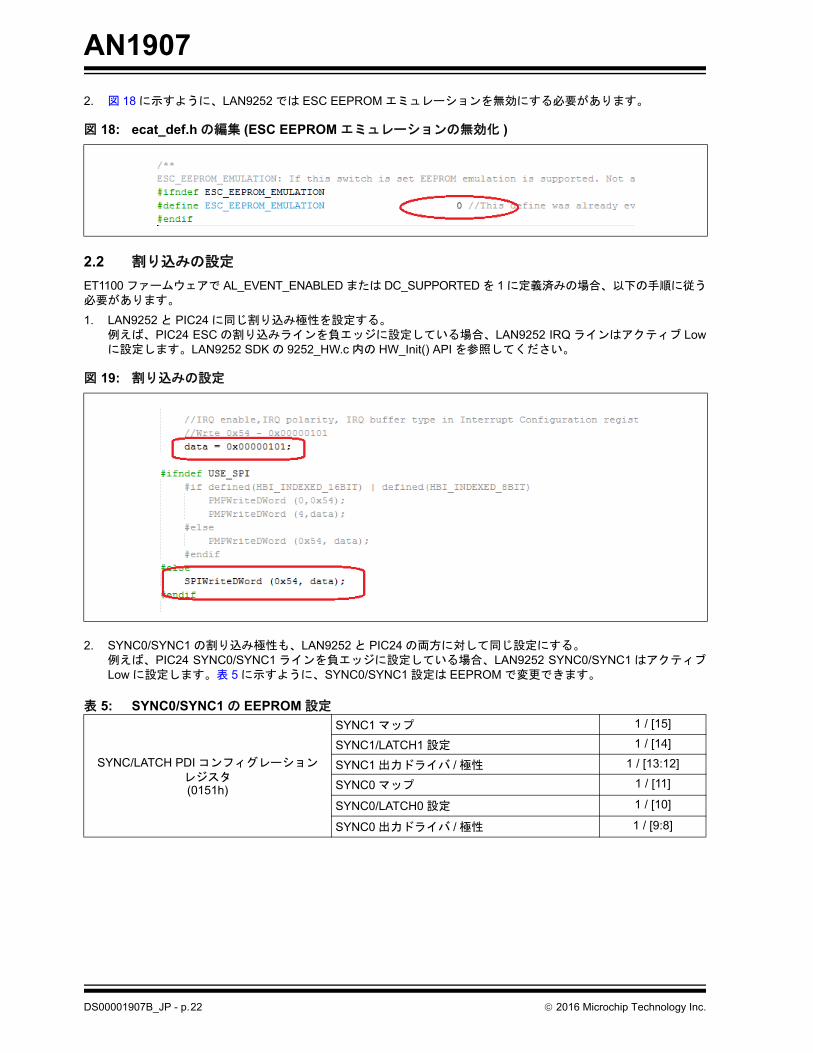
2. 図 18 に示すように、LAN9252 では ESC EEPROM エミュレーションを無効にする必要があります。2.2 割り込みの設定
ET1100 ファームウェアで AL_EVENT_ENABLED または DC_SUPPORTED を 1 に定義済みの場合、以下の手順に従う必要があります。
1. LAN9252 と PIC24 に同じ割り込み極性を設定する。 例えば、PIC24 ESC の割り込みラインを負エッジに設定している場合、LAN9252 IRQ ラインはアクティブ Low に設定します。LAN9252 SDK の 9252_HW.c 内の HW_Init() API を参照してください。
2. SYNC0/SYNC1 の割り込み極性も、LAN9252 と PIC24 の両方に対して同じ設定にする。 例えば、PIC24 SYNC0/SYNC1 ラインを負エッジに設定している場合、LAN9252 SYNC0/SYNC1 はアクティブ Low に設定します。表 5 に示すように、SYNC0/SYNC1 設定は EEPROM で変更できます。
表 5: SYNC0/SYNC1 の EEPROM 設定
図 18: ecat_def.h の編集 (ESC EEPROM エミュレーションの無効化 )
図 19: 割り込みの設定
SYNC/LATCH PDI コンフィグレーション レジスタ(0151h)
SYNC1 マップ 1 / [15]
SYNC1/LATCH1 設定 1 / [14]
SYNC1 出力ドライバ / 極性 1 / [13:12]
SYNC0 マップ 1 / [11]
SYNC0/LATCH0 設定 1 / [10]
SYNC0 出力ドライバ / 極性 1 / [9:8]
DS00001907B_JP - p. 22 2016 Microchip Technology Inc.

AN1907
2.3 ESI ファイルESC の設定は LAN9252 と ET1100 で異なります。従って、ESI ファイルを以下のように変更する必要があります。
1. 変更する ET1100 の ESI ファイルを開く。
2. XML ファイル内の「ConfigData」を検索し、それを図 20 に示すように変更し、ファイルを保存する。
LAN9252 の EEPROM の内容の変更の詳細は LAN9252 データシートを参照してください。
2.4 SPI スレーブ コントローラ
SPI コマンドは LAN9252 と ET1100 で異なります。従って、SPI ドライバを変更する必要があります。
2.4.1 ET1100 SPI アドレスモード
SPI スレーブ インターフェイスは 2 つのアドレスモード、つまり 2 バイトアドレス指定モードと 3 バイトアドレス指定 モードをサポートしています。2 バイトアドレス指定では、下位 13 アドレスビット A[12:0] は SPI で選択し、上位3 ビット A[15:13] は SPI 内では 000b と見なされます。従って、EtherCAT スレーブアドレス空間の最初の 8K バイトのみにアクセスできます。3 バイトアドレス指定では、EtherCAT スレーブアドレス空間の全 64K バイトにアクセスできます。表 6 に、これらのモードのまとめを示します。
表 6: ET1100 のアドレスモード
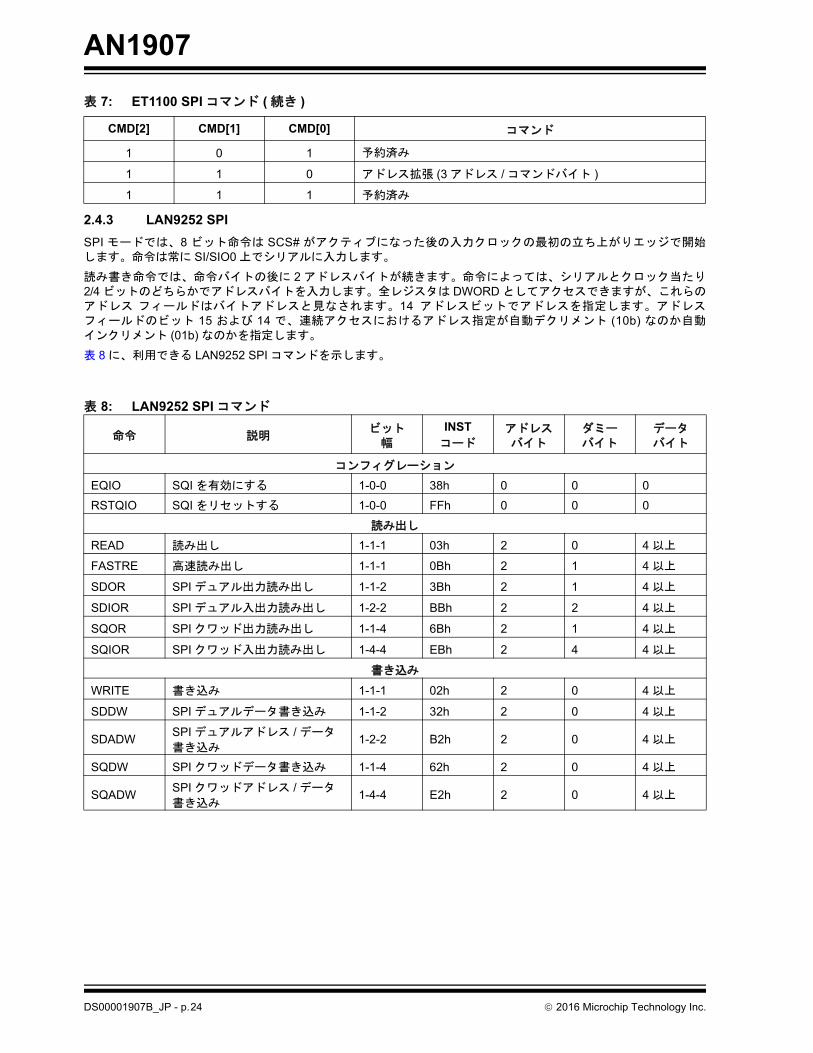
2.4.2 ET1100 SPI コマンド
2 番目のアドレス / コマンドバイト ( 表 6) の CMD0 コマンドは、READ、ウェイトステート バイトを伴う READ、 WRITE、NOP、アドレス拡張のいずれかです。表 7 に、これらのコマンドのまとめを示します。
図 20: ESI の ConfigData の編集
バイト 2 バイトアドレス モード 3 バイトアドレス モード
0 A[12:5] アドレスビット [12:5] A[12:5] アドレスビット [12:5]
1A[4:0]CMD0[2:0]
アドレスビット [4:0]読み書きコマンド
A[4:0]CMD0[2:0]
アドレスビット [4:0]読み書きコマンド
2 D0[7:0] データバイト 0A[15:13]CMD1[2:0]res[1:0]
アドレスビット [15:13]読み書きコマンド予約済みビット (00b に設定 )
3 D1[7:0] データバイト 1 D0[7:0] データバイト 0
4 D2[7:0] データバイト 2 D1[7:0] データバイト 1
表 7: ET1100 SPI コマンド
CMD[2] CMD[1] CMD[0] コマンド
0 0 0 NOP( 動作なし )
0 0 1 予約済み
0 1 0 READ
0 1 1 ウェイトステート バイトを伴う READ
1 0 0 WRITE
2016 Microchip Technology Inc. DS00001907B_JP - p. 23
AN1907
2.4.3 LAN9252 SPISPI モードでは、8 ビット命令は SCS# がアクティブになった後の入力クロックの最初の立ち上がりエッジで開始します。命令は常に SI/SIO0 上でシリアルに入力します。
読み書き命令では、命令バイトの後に 2 アドレスバイトが続きます。命令によっては、シリアルとクロック当たり2/4 ビットのどちらかでアドレスバイトを入力します。全レジスタは DWORD としてアクセスできますが、これらのアドレス フィールドはバイトアドレスと見なされます。14 アドレスビットでアドレスを指定します。アドレス フィールドのビット 15 および 14 で、連続アクセスにおけるアドレス指定が自動デクリメント (10b) なのか自動インクリメント (01b) なのかを指定します。
表 8 に、利用できる LAN9252 SPI コマンドを示します。
表 8: LAN9252 SPI コマンド
1 0 1 予約済み
1 1 0 アドレス拡張 (3 アドレス / コマンドバイト )
1 1 1 予約済み
命令 説明ビット幅
INSTコード
アドレスバイト
ダミーバイト
データバイト
コンフィグレーション
EQIO SQI を有効にする 1-0-0 38h 0 0 0RSTQIO SQI をリセットする 1-0-0 FFh 0 0 0
読み出し
READ 読み出し 1-1-1 03h 2 0 4 以上
FASTRE 高速読み出し 1-1-1 0Bh 2 1 4 以上
SDOR SPI デュアル出力読み出し 1-1-2 3Bh 2 1 4 以上
SDIOR SPI デュアル入出力読み出し 1-2-2 BBh 2 2 4 以上
SQOR SPI クワッド出力読み出し 1-1-4 6Bh 2 1 4 以上
SQIOR SPI クワッド入出力読み出し 1-4-4 EBh 2 4 4 以上
書き込み
WRITE 書き込み 1-1-1 02h 2 0 4 以上
SDDW SPI デュアルデータ書き込み 1-1-2 32h 2 0 4 以上
SDADW SPI デュアルアドレス / データ
書き込み1-2-2 B2h 2 0 4 以上
SQDW SPI クワッドデータ書き込み 1-1-4 62h 2 0 4 以上
SQADW SPI クワッドアドレス / データ
書き込み1-4-4 E2h 2 0 4 以上
表 7: ET1100 SPI コマンド ( 続き )
CMD[2] CMD[1] CMD[0] コマンド
DS00001907B_JP - p. 24 2016 Microchip Technology Inc.

AN1907
補遺 A: アプリケーション ノートの改訂履歴
表 A-1: 改訂履歴
リビジョンレベル / 日付 セクション / 図 / 項目 改訂内容
DS00001907B 動作モードとプロセスデータインターフェイス (PDI)の選択と設定
セクションを削除し、セクション 1.4、「プロセスデータ インターフェイス(PDI)」に置き換えました。
表 1、「主な ESC 機能の比較」 表を変更しました。
図3、「LAN9252 ESCのブロッ ク図」
図を変更しました。
スレーブ コンフィグレーショ ン ヘッダ (ecat_def.h)、割り 込みの設定、ESI ファイル
新しいセクションを追加しました。
DS00001907A 本書は初版です。
2016 Microchip Technology Inc. DS00001907B_JP - p. 25

Microchip 社製デバイスのコード保護機能に関して以下の点にご注意ください。
• Microchip 社製品は、該当する Microchip 社データシートに記載の仕様を満たしています。
• Microchip 社では、通常の条件ならびに仕様に従って使用した場合、Microchip 社製品のセキュリティ レベルは、現在市場に
流通している同種製品の中でも最も高度であると考えています。
• しかし、コード保護機能を解除するための不正かつ違法な方法が存在する事もまた事実です。弊社の理解では、こうした手法
は Microchip 社データシートにある動作仕様書以外の方法で Microchip 社製品を使用する事になります。このような行為は知
的所有権の侵害に該当する可能性が非常に高いと言えます。
• Microchip 社は、コードの保全性に懸念を抱いているお客様と連携し、対応策に取り組んでいきます。
• Microchip 社を含む全ての半導体メーカーで、自社のコードのセキュリティを完全に保証できる企業はありません。コード保
護機能とは、Microchip 社が製品を「解読不能」として保証するものではありません。
コード保護機能は常に進歩しています。Microchip 社では、常に製品のコード保護機能の改善に取り組んでいます。Microchip 社の
コード保護機能の侵害は、デジタル ミレニアム著作権法に違反します。そのような行為によってソフトウェアまたはその他の著作
物に不正なアクセスを受けた場合、デジタル ミレニアム著作権法の定めるところにより損害賠償訴訟を起こす権利があります。
本書に記載されているデバイス アプリケーション等に関する
情報は、ユーザの便宜のためにのみ提供されているものであ
り、更新によって無効とされる事があります。お客様のアプ
リケーションが仕様を満たす事を保証する責任は、お客様に
あります。Microchip 社は、明示的、暗黙的、書面、口頭、法
定のいずれであるかを問わず、本書に記載されている情報に
関して、状態、品質、性能、商品性、特定目的への適合性を
はじめとする、いかなる類の表明も保証も行いません。
Microchip 社は、本書の情報およびその使用に起因する一切の
責任を否認します。生命維持装置あるいは生命安全用途に
Microchip 社の製品を使用する事は全て購入者のリスクとし、
また購入者はこれによって発生したあらゆる損害、クレーム、
訴訟、費用に関して、Microchip 社は擁護され、免責され、損
害を受けない事に同意するものとします。暗黙的あるいは明
示的を問わず、Microchip 社が知的財産権を保有しているライ
センスは一切譲渡されません。
2016 Microchip Technology Inc.
商標
Microchip 社の名称とロゴ、Microchip ロゴ、dsPIC、FlashFlex、flexPWR、JukeBlox、KEELOQ、KEELOQlogo、Kleer、LANCheck、MediaLB、MOST、MOST logo、MPLAB、OptoLyzer、 PIC、PICSTART、PIC32 logo、RightTouch、SpyNIC、SST、SSTLogo、SuperFlash および UNI/O は米国およびその他の国に
おける Microchip Technology Incorporated の登録商標です。
Embedded Control Solutions Company、mTouch は米国に
おける Microchip Technology Incorporated の登録商標です。
Analog-for-the-Digital Age、BodyCom、chipKIT、chipKIT logo、 CodeGuard、dsPICDEM、dsPICDEM.net、ECAN、In-Circuit Serial Programming、ICSP、Inter-Chip Connectivity、KleerNet、KleerNet logo、MiWi、motorBench、MPASM、MPF、MPLAB Certified logo、 MPLIB、MPLINK、MultiTRAK、NetDetach、Omniscient Code Generation、PICDEM、PICDEM.net、PICkit、PICtail、RightTouchlogo、REAL ICE、SQI、Serial Quad I/O、Total Endurance、 TSHARC、USBCheck、VariSense、ViewSpan、WiperLock、Wireless DNA、および ZENA は米国およびその他の Microchip Technology Incorporated の商標です。
SQTP は米国における Microchip Technology Incorporated の
サービスマークです。
Silicon Storage Technology は他の国における Microchip Technology Inc. の登録商標です。
GestIC は Microchip Technology Inc. の子会社である Microchip Technology Germany II GmbH & Co. & KG 社の他の国における
登録商標です。
その他本書に記載されている商標は各社に帰属します。
© 2016, Microchip Technology Incorporated, All Rights Reserved.
ISBN: 978-1-5224-0165-0
DS00001907B_JP - p. 26
Microchip 社では、Chandler および Tempe ( アリゾナ州 )、Gresham ( オレゴン州 ) の本部、設計部およびウェハー製造工場そしてカリフォルニア州とインドのデザインセンターが ISO/TS-16949:2009 認証を取得しています。Microchip 社の品質システム プロセスおよび手順は、PIC® MCU および dsPIC® DSC、KEELOQ® コード ホッピング デバイス、シリアル EEPROM、マイクロペリフェラル、不揮発性メモリ、アナログ製品に採用されています。さらに、開発システムの設計と製造に関する Microchip 社の品質システムは ISO 9001:2000 認証を取得しています。
DS00001907B_JP - p.27 2016 Microchip Technology Inc.
北米本社2355 West Chandler Blvd.Chandler, AZ 85224-6199Tel: 480-792-7200 Fax: 480-792-7277技術サポート : http://www.microchip.com/supportURL: www.microchip.comアトランタDuluth, GA Tel: 678-957-9614 Fax: 678-957-1455オースティン、TXTel: 512-257-3370 ボストンWestborough, MATel: 774-760-0087 Fax: 774-760-0088シカゴItasca, ILTel: 630-285-0071 Fax: 630-285-0075クリーブランドIndependence, OHTel: 216-447-0464Fax: 216-447-0643ダラスAddison, TXTel: 972-818-7423 Fax: 972-818-2924デトロイトNovi, MI Tel: 248-848-4000ヒューストン、TXTel: 281-894-5983インディアナポリスNoblesville, INTel: 317-773-8323Fax: 317-773-5453ロサンゼルスMission Viejo, CATel: 949-462-9523 Fax: 949-462-9608ニューヨーク、NY Tel: 631-435-6000サンノゼ、CATel: 408-735-9110カナダ - トロント
Tel: 905-673-0699 Fax: 905-673-6509
アジア / 太平洋アジア太平洋支社Suites 3707-14, 37th FloorTower 6, The GatewayHarbour City, KowloonHong KongTel: 852-2943-5100Fax: 852-2401-3431オーストラリア - シドニー
Tel: 61-2-9868-6733Fax: 61-2-9868-6755中国 - 北京
Tel: 86-10-8569-7000Fax: 86-10-8528-2104中国 - 成都
Tel: 86-28-8665-5511Fax: 86-28-8665-7889中国 - 重慶
Tel: 86-23-8980-9588Fax: 86-23-8980-9500中国 - 東莞
Tel: 86-769-8702-9880中国 - 杭州
Tel: 86-571-8792-8115Fax: 86-571-8792-8116中国 - 香港 SARTel: 852-2943-5100 Fax: 852-2401-3431中国 - 南京
Tel: 86-25-8473-2460Fax: 86-25-8473-2470中国 - 青島
Tel: 86-532-8502-7355Fax: 86-532-8502-7205中国 - 上海
Tel: 86-21-5407-5533Fax: 86-21-5407-5066中国 - 瀋陽
Tel: 86-24-2334-2829Fax: 86-24-2334-2393中国 - 深圳
Tel: 86-755-8864-2200 Fax: 86-755-8203-1760中国 - 武漢
Tel: 86-27-5980-5300Fax: 86-27-5980-5118中国 - 西安
Tel: 86-29-8833-7252Fax: 86-29-8833-7256
アジア / 太平洋中国 - 厦門
Tel: 86-592-2388138 Fax: 86-592-2388130中国 - 珠海
Tel: 86-756-3210040 Fax: 86-756-3210049インド - バンガロール
Tel: 91-80-3090-4444 Fax: 91-80-3090-4123インド - ニューデリー
Tel: 91-11-4160-8631Fax: 91-11-4160-8632インド - プネ
Tel: 91-20-3019-1500日本 - 大阪
Tel: 81-6-6152-7160Fax: 81-6-6152-9310日本 - 東京
Tel: 81-3-6880-3770 Fax: 81-3-6880-3771韓国 - 大邱
Tel: 82-53-744-4301Fax: 82-53-744-4302韓国 - ソウル
Tel: 82-2-554-7200Fax: 82-2-558-5932 または
82-2-558-5934マレーシア - クアラルンプール
Tel: 60-3-6201-9857Fax: 60-3-6201-9859マレーシア - ペナン
Tel: 60-4-227-8870Fax: 60-4-227-4068フィリピン - マニラ
Tel: 63-2-634-9065Fax: 63-2-634-9069シンガポールTel: 65-6334-8870Fax: 65-6334-8850台湾 - 新竹
Tel: 886-3-5778-366Fax: 886-3-5770-955台湾 - 高雄
Tel: 886-7-213-7830台湾 - 台北
Tel: 886-2-2508-8600 Fax: 886-2-2508-0102タイ - バンコク
Tel: 66-2-694-1351Fax: 66-2-694-1350
ヨーロッパオーストリア - ヴェルス
Tel: 43-7242-2244-39Fax: 43-7242-2244-393デンマーク - コペンハーゲン
Tel: 45-4450-2828 Fax: 45-4485-2829フランス - パリ
Tel: 33-1-69-53-63-20 Fax: 33-1-69-30-90-79ドイツ - デュッセルドルフ
Tel: 49-2129-3766400 ドイツ - カールスルーエ
Tel: 49-721-625370ドイツ - ミュンヘン
Tel: 49-89-627-144-0 Fax: 49-89-627-144-44イタリア - ミラノ Tel: 39-0331-742611 Fax: 39-0331-466781イタリア - ヴェニス
Tel: 39-049-7625286 オランダ - ドリューネン
Tel: 31-416-690399 Fax: 31-416-690340ポーランド - ワルシャワ
Tel: 48-22-3325737 スペイン - マドリッド
Tel: 34-91-708-08-90Fax: 34-91-708-08-91スウェーデン - ストックホルム
Tel: 46-8-5090-4654イギリス - ウォーキンガム
Tel: 44-118-921-5800Fax: 44-118-921-5820
各国の営業所とサービス
07/14/15


















