An Overview of Composite Actuators with Piezoceramic Fibers€¦ · different types of active fiber...
7
AN OVERVIEW OF COMPOSITE ACTUATORS WITH PIEZOCERAMIC FIBERS R. Brett Williams * , Gyuhae Park † , Daniel J. Inman ‡ and W. Keats Wilkie § *Graduate Research Assistant: [email protected] † Research Assistant: [email protected] ‡ G.R. Goodson Professor and Director: [email protected] Center for Intelligent Material Systems and Structures, Department of Mechanical Engineering, Virginia Polytechnic Institute and State University, 310 Durham Hall, Blacksburg, VA 24061-0261 §Research Scientist, Structural Dynamics Branch, NASA Langley Research Center ABSTRACT The use of piezoelectric ceramic materials for structural actuation is a fairly well developed practice that has found use in a wide variety of applications. However, just as advanced composites offer many benefits over traditional engineering materials for structural design, actuators that utilize the active properties of piezoelectric fibers can improve upon many of the limitations encountered with monolithic piezoceramic devices used to control structural dynamics. There are several types of active composites available commercially or under development at research institutes. This paper will discuss the manufacturing processes, intended applications and relative benefits of four different types of active fiber composite actuators. 1 INTRODUCTION The past few decades have seen the development and integration of active materials into a variety of host structures as a superior means of sensing and actuating the behavior of the structure. While there exists many types of useful active materials, such as shape memory alloys, electrostrictives and magnetorheological fluids, piezoelectric materials remain the most widely used “smart” material for a number of reasons. First, piezoceramics have a high structural stiffness, which affords them a strong, voltage- dependent actuation authority. Additionally, piezoceramics are capable of interacting with dynamic systems at frequencies spanning from about 1 Hz well into the megahertz range. In the past, a good deal of success was obtained in the field of intelligent structures using monolithic wafers of piezoceramic material. However, there are several practical limitations to implementing this delicate type of material, namely the brittle nature of ceramics makes them vulnerable to accidental breakage during handling and bonding procedures, as well as their extremely limited ability to conform to curved surfaces and the large add-on mass associated with using a typically lead-based piezoceramic. The idea of a composite material consisting of an active piezoceramic fibrous phase embedded in a polymeric matrix phase remedies many of the aforementioned restrictions. Typically, crystalline materials have much higher strengths in the fiber form, where the decrease in volume fraction of flaws leads to an increase in specific strength. Also, in addition to protecting the fibers, the flexible nature of the polymer matrix allows the material to more easily conform to the curved surfaces found in more realistic industrial applications. Moreover, active fiber composites offer many distinct advantages with respect to their monolithic counterparts. The multiphase construction yields a more robust actuator that is capable of being added to a lay-up as “active layers” along with conventional fiber-reinforced laminae. While complex arrangements of piezoelectric blocks are required to both bend and twist a structure [1] , the fiber-reinforced composite nature of active fiber composites yields in-plane actuation anisotropy, allowing a single patch the ability to apply both bending moments and twisting torques. Most importantly, the use of interdigitated electrodes causes these actuators to develop much higher forces or displacements by capitalizing on the stronger longitudinal (d33 constant) piezoelectric effect, in which the largest mechanical response occurs in the direction of applied electric field [2] . Presently, there is an ever-increasing number of research grade and commercially available composites containing piezoelectric fibers. However, there exist four industry- leading types of promising actuators for intelligent structure applications that will be discussed in this article. The first type is referred to as 1-3 Composites and is manufactured by Smart Material Corp [3] and is typically used for ultrasonic and acoustic control applications. Active Fiber Composite (AFC) actuators were developed at MIT and were the first composite actuator to focus primarily on structural actuation [4-10] . Third, Macro Fiber Composites (MFC) were developed at NASA Langley Research Center, also for structural actuation purposes [2, 11-14] . Lastly, the idea of active composites fabricated with hollow cross-section fibers has been proposed [15] as a means of lowering the typically high voltages required to actuate AFC’s and MFC’s. This research effort presents an overview of these four types of composite transducers, focusing on manufacturing techniques and current industrial and research uses. 421
Transcript of An Overview of Composite Actuators with Piezoceramic Fibers€¦ · different types of active fiber...

AN OVERVIEW OF COMPOSITE ACTUATORS WITH PIEZOCERAMIC FIBERS
R. Brett Williams*, Gyuhae Park†, Daniel J. Inman‡ and W. Keats Wilkie§
*Graduate Research Assistant: [email protected]
† Research Assistant: [email protected] ‡ G.R. Goodson Professor and Director: [email protected]
Center for Intelligent Material Systems and Structures, Department of Mechanical Engineering, Virginia Polytechnic Institute and State University, 310 Durham Hall, Blacksburg, VA 24061-0261 §Research Scientist, Structural Dynamics Branch, NASA Langley Research Center
ABSTRACT The use of piezoelectric ceramic materials for structural actuation is a fairly well developed practice that has found use in a wide variety of applications. However, just as advanced composites offer many benefits over traditional engineering materials for structural design, actuators that utilize the active properties of piezoelectric fibers can improve upon many of the limitations encountered with monolithic piezoceramic devices used to control structural dynamics. There are several types of active composites available commercially or under development at research institutes. This paper will discuss the manufacturing processes, intended applications and relative benefits of four different types of active fiber composite actuators. 1 INTRODUCTION The past few decades have seen the development and integration of active materials into a variety of host structures as a superior means of sensing and actuating the behavior of the structure. While there exists many types of useful active materials, such as shape memory alloys, electrostrictives and magnetorheological fluids, piezoelectric materials remain the most widely used “smart” material for a number of reasons. First, piezoceramics have a high structural stiffness, which affords them a strong, voltage-dependent actuation authority. Additionally, piezoceramics are capable of interacting with dynamic systems at frequencies spanning from about 1 Hz well into the megahertz range. In the past, a good deal of success was obtained in the field of intelligent structures using monolithic wafers of piezoceramic material. However, there are several practical limitations to implementing this delicate type of material, namely the brittle nature of ceramics makes them vulnerable to accidental breakage during handling and bonding procedures, as well as their extremely limited ability to conform to curved surfaces and the large add-on mass associated with using a typically lead-based piezoceramic. The idea of a composite material consisting of an active piezoceramic fibrous phase embedded in a polymeric matrix phase remedies many of the aforementioned restrictions. Typically, crystalline materials have much higher strengths in
the fiber form, where the decrease in volume fraction of flaws leads to an increase in specific strength. Also, in addition to protecting the fibers, the flexible nature of the polymer matrix allows the material to more easily conform to the curved surfaces found in more realistic industrial applications. Moreover, active fiber composites offer many distinct advantages with respect to their monolithic counterparts. The multiphase construction yields a more robust actuator that is capable of being added to a lay-up as “active layers” along with conventional fiber-reinforced laminae. While complex arrangements of piezoelectric blocks are required to both bend and twist a structure[1], the fiber-reinforced composite nature of active fiber composites yields in-plane actuation anisotropy, allowing a single patch the ability to apply both bending moments and twisting torques. Most importantly, the use of interdigitated electrodes causes these actuators to develop much higher forces or displacements by capitalizing on the stronger longitudinal (d33 constant) piezoelectric effect, in which the largest mechanical response occurs in the direction of applied electric field[2]. Presently, there is an ever-increasing number of research grade and commercially available composites containing piezoelectric fibers. However, there exist four industry-leading types of promising actuators for intelligent structure applications that will be discussed in this article. The first type is referred to as 1-3 Composites and is manufactured by Smart Material Corp[3] and is typically used for ultrasonic and acoustic control applications. Active Fiber Composite (AFC) actuators were developed at MIT and were the first composite actuator to focus primarily on structural actuation[4-10]. Third, Macro Fiber Composites (MFC) were developed at NASA Langley Research Center, also for structural actuation purposes [2, 11-14]. Lastly, the idea of active composites fabricated with hollow cross-section fibers has been proposed[15] as a means of lowering the typically high voltages required to actuate AFC’s and MFC’s. This research effort presents an overview of these four types of composite transducers, focusing on manufacturing techniques and current industrial and research uses.
421

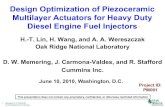
2 MANUFACTURING TECHNIQUES 2.1 1-3 Composites Smart Material Corp. manufactures one popular active composite element commonly referred to as a 1-3 composite, which contains piezoelectric rods embedded in a polymer matrix and aligned through the thickness of the device. Figure 1 shows this type of device where the active pixels can be either rectangular (80 microns with 120-micron spaces) or round (70 micron diameter with 50 micron spaces).
a)
b)
Figure 1: 1-3 Composites by Smart Materials Corp. a) Rectangular Fibers, b) Round Fibers.
The 1-3 notation specifies the connectivity pattern for this particular arrangement of fibers and the surrounding matrix material. Specifically, the piezoceramic constituent is continuous in one direction, i.e. through the thickness, while the matrix material is connected in all three orthogonal directions. These devices are manufactured using a patented soft-mold technology that was invented at the Fraunhofer Research Facility in Germany. This process consists simply of copying a soft mold from a positive form of the final structure, filling the mold with piezoceramic material and subsequent firing of the element. This process holds many advantages over conventional die-and-fill, injection molding or dicing techniques. First, the molds are reusable, thus allowing thousands of copies to be made of the original form with a single soft mold. Also, this process is cost-efficient as the molds are relatively easy and inexpensive to make in comparison with traditional, costly metal dies. While some configurations could be made by dicing the desired final shape from a monolithic piezoceramic block, the soft-molding process alleviates the need for such expensive cutting machinery. Lastly, the soft-molding process is capable of producing elements with various types of fiber shapes, sizes and pitches and offers the capacity to manufacture high volumes while maintaining superior quality at a reasonable price per unit.
Once the piezoceramic rods have been formed, the remaining spaces are filled with a polymer matrix material that protect the brittle fibers from accidental breakage. Metal electrodes are then bonded to the ends of the fibers and first used to polarize the piezoceramic at an elevated temperature and then to apply an electric field or collect a developed charge from the material. At this point, the active elements are ready to be used as integrated sensors or actuators. 2.2 Active Fiber Composites Active Fiber Composites (AFCs), developed at the Active Materials and Structures Lab at MIT, are another type of piezoceramic fiber composite that has a wide range of potential applications. This type of device has uniaxially aligned piezoceramic fibers surrounded by a polymer matrix and can include inactive glass fibers for increased structural strength. A photomicrograph of an AFC cross-section is shown in Figure 2, where the piezoelectric fibers are 130 microns in diameter and the S-glass fibers have a diameter of 5 microns.
Figure 2: Cross Section of an Active Fiber Composite. Good bonding between the matrix and fibers allows the load induced in the fibers to be transferred consistently to the host structure through the matrix. The interdigitated electrodes deliver the electric field required to activate the piezoelectric effect in the fibers as seen in Figure 3. This special type of electrodes allows one to invoke the stronger longitudinal piezoelectric effect along the length of the fibers.
Figure 3: Active Fiber Composite Schematic.
422

Figure 3 also reveals that the three main constituents of Active Fiber Composites are piezoceramic fibers, interdigitated electrodes and a polymer matrix. The fibers are typically circular in cross section and made by an extrusion process, but can also be fabricated using molding techniques or by slicing monolithic piezoceramic sheets to obtain fibers of rectangular cross section. The metallic electrodes are normally made using photolithography, which is a highly accurate yet timely and expensive process that etches copper strips onto a thin Kapton film. Alternatively, screen-printing silver ink onto the Kapton film produces usable electrodes in a timely and inexpensive manner, but the final products experience variations in electrode patterns and limited ductility that results in shorter service lives. The polymeric matrix material is perhaps the constituent with the most range of acceptable materials. Ideally, the matrix will have outstanding mechanical and dielectric properties and will bond to the fibers in a consistent manner. While epoxy is the standard resin system of choice for its superior mechanical properties, it has a low dielectric constant, which reduces the efficiency at which the applied voltage is delivered to the active fibers. An alternate matrix material is the thermoplastic piezopolymer PVDF, which has a high dielectric constant on the same order of magnitude as the piezoceramic fibers. With the three main constituents in hand, assembly of the Active Fiber Composite commences as shown in Figure 4. First, the bottom electrode is placed on the aluminum vacuum plate using the locator pins. The piezoceramic fibers are then aligned in a single layer as shown on top of the bottom electrode. At this point, inert glass fibers can be added and aligned with the piezoceramic fibers to increase mechanical strength of the device and a Kapton mold is inserted along the sides of the mold to help retain and form the forthcoming matrix material.
Figure 4: Manufacturing Schematic for Active Fiber
Composites. Epoxy resin doped with an air-release agent is then applied to the fibers and the top electrode layer is placed atop of the fibers, again using the locator pins. This stack is then placed into a press, where heat and pressure is applied in order to cure the epoxy and to minimize the space between the active fibers and the electrodes to facilitate the application of an electric field to piezoceramic. The vacuum port on the aluminum base plate and the air-release agent in the epoxy
matrix are used to minimize void formation, which would significantly reduce the dielectric constant of the matrix and render the active configuration highly ineffective. After the part is properly cured, the active fibers must be poled in order to exhibit piezoelectric behavior. This final processing step involves raising the AFC above the Curie temperature of the ceramic and applying a large, constant voltage through the interdigitated electrodes for a set period of time. At this point, the active system can be attached or integrated into the desired host structure. 2.3 Macro Fiber Composites A third type of device that uses both active and composite material technologies in addition to interdigitated electrodes is called Macro Fiber Composites (MFCs) and was developed at the NASA Langley Research Center. This active element also has uniaxially aligned fibers surrounded by a polymeric matrix, but the fibers specifically have a rectangular cross-section. A photomicrograph of a MFC is shown in Figure 5, where the fiber’s length and height dimensions are 356 and 178 microns, respectively.
Figure 5: Cross Section of a Macro Fiber Composite. Just as was the case for Active Fiber Composites, MFCs use an interdigitated electrode pattern to deliver an electric field along the length of the fibers and relies on solid bonding between the matrix and fibers to properly transfer actuation loads. A schematic of Macro Fiber Composites is seen in Figure 6.
Figure 6: Macro Fiber Composite Schematic.
Again, just like Active Fiber Composites, the three primary constituents of MFCs are piezoceramic fibers, interdigitated electrodes and a polymer matrix material. However, the fibers for Macro Fiber Composites are machined from low-cost piezoceramic wafers using a computer controlled dicing saw as seen on the left hand side of Figure 7.
423

Figure 7: Fabrication Schematic for Rectangular Fibers Also in Figure 7, the ceramic wafer is seen on the blue polymer carrier film, which serves to hold the fibers in place during and after machining. The interdigitated electrodes are made using a photoresist-and-etch process on copper-clad Kapton film. After the fibers and the two electrode layers have been produced, the plies are stacked up by first covering the bottom electrode with the desired polymer that will function as the matrix material for the composite. Presently, thermosetting epoxy is the resin system of choice. Next, the rectangular piezoceramic fibers are properly aligned atop of the bottom electrode layer and the layers are heated slightly to ensure that the fibers remain in place. These steps are outlined in Figure 8. An additional layer of epoxy is then added on top of the fibers, to which the top electrode layer is attached. With all of the layers in place, the assembly is placed into a vacuum press with heated platens where the matrix is allowed to cure under heat and pressure as specified by the epoxy manufacturer. The vacuum is used to minimize the formation and growth of voids in the epoxy resin matrix. The last step in the fabrication of Macro Fiber Composites is to pole the piezoceramic material, which is done by applying 3000 volts to the interdigitated electrodes for approximately one minute. Elevated temperatures can also be used during the poling operation to decrease the processing time slightly, however, this additional heating step is not necessary.
Figure 8: Manufacturing Schematic for Macro Fiber
Composites.
2.4 Hollow Tube Active Fiber Composites A fourth type of active fiber composite actuator has been fabricated using extruded hollow cross-section fibers[15]. Since the fibers have small diameters on the order of 0.9 mm, a new manufacturing technique was implemented called Microfabrication by Coextrusion (MFCX). The manufacturing of these fibers consists of three main steps, feed rod formation, extrusion and burnout/sintering. These steps are illustrated in Figure 9 and described below. The feed rod formation process has two main steps as illustrated in Figure 9a). The first is to mix the piezoelectric powder with thermoplastic polymers and to separately mix the same polymers with carbon black powder so that the two mixes have nearly the same viscosity. The piezoceramic mix is then formed into a round, thick-walled tube, while part of the carbon black mix is formed into a round cylinder the exact diameter as the inside of the piezoceramic tube. The remainder of the carbon black mix is formed into a square cross section block with the same dimensions as the inlet to the extrusion die, while a circular hole is bored into the center of the square the exact diameter as the outside of the piezoceramic tube. These three components are then assembled, with the carbon black cylinder inside of the piezoceramic hollow tube, which in turn is placed inside of the square block. The extrusion process begins when the assembled feed rod seen at the bottom of Figure 9a) is now heated and inserted into the extrusion die, which turns reduces the cross section of the feeder rod by a factor or 25 or 40, depending on the desired final tube dimensions.
Figure 9: Hollow Cross-Section Fiber Production Using MFCX a) Feed Rod Formation, b) Extrusion, c) Burnout
and Sintering. The resulting “green” fibers are then heated to and held at 1300°C for 48 hours during the burnout and sintering step. This causes the carbon black to be burned off from the exterior and interior of the tube and causes the thermoplastics to be removed from the piezoceramic material, which causes a stronger, denser ceramic and is accompanied by typically a 30% reduction in the cross-section of the finished hollow tube, which is shown in Figure 10.
424

Figure 10: Cross-Section of Hollow Fiber
Electrodes are then added on the interior and exterior circumferences using silver paint, and then the tubes are poled under an applied field of 1200 V/mm. An active composite lamina was then fabricated using eight of the hollow tube fibers as shown in Figure 11.
Figure 11: Active Composite Laminate with Hollow
Cross-Section Fibers. First, a wax mold was partially filled with epoxy, into which the fibers were added and aligned as shown, with the electroded ends extending beyond one end of the mold. The remainder of the mold was then filled with epoxy, which was then allowed to cure. After, curing, the assembly was heated to melt off the wax mold, leaving only the finished active composite lamina. An electrical bus was then added to the exposed ends to allow an electric field to be applied to the composite actuator. 3 Applications of Active Composite Actuators While the development and fabrication of active fiber systems is important, the ability of these devices to improve realistic structures is clearly the next step in order to bring the intensive research efforts discussed above to fruition. Since much of the active fiber composites research is funded by the defense industry, most applications are initially geared towards such vehicles. The subsequent sections will discuss several applications of these various active fiber composite devices.
3.1 1-3 Composites One common use of 1-3 composites is in smart composite panels as shown in Figure 12. When attached to a structure such as an airplane fuselage, these active panels can reduce internal noise levels, function as pressure sensors to measure conditions outside the plane and reduce broadband vibration levels by 20 dB.
Figure 12: Smartpanel by MSI
3.2 Active Fiber Composites While one of the benefits of the Active Fiber Composites developed at MIT is the ease with which they are laid up into almost any laminated composite structure, helicopter rotor blades have been the predominant structure under consideration. These blades are noisy and vibrate a great deal in flight due to large aerodynamic loads. As a result, active rotor blades have been developed with an embedded Active Fiber Composite layer, shown in an actual scale model in Figure 13 and schematically Figure 14.
Figure 13: Photograph of Embedded Active Fiber Composite Layers in Rotor Blade
425

Figure 14: Schematic of Embedded Active Fiber Composite Layers in Rotor Blade
Improving the performance of these blades will increase both pilot and helicopter performance as well as make for a quieter rider for passengers. In addition to vibration suppression, Active Fiber Composites are able to adjust the twist of the blades which controls how the helicopter flies and could replace conventional hydraulic systems. 3.3 Macro Fiber Composites One of the high-profile applications for Macro Fiber Composites is in the vertical tail fins of fighter aircraft. Five MFC actuators are embedded under the fiberglass shell on each side of the tail fins as seen in Figure 15. The goal of these actuators is to counteract the bending and torsional stresses that the fins experience while in flight as a result of buffeting loads. This reduction in stress will lead to longer aircraft life and increased performance.
Figure 15: Tail Fin Model for Active Buffet Load
Alleviation
Another application for Macro Fiber Composites pertains to controlling the vibrations of inflatable spacecraft. Researchers at the Center for Intelligent Material Systems and Structures at Virginia Tech have used Macro Fiber Composites to both sense and control vibrational disturbances. Figure 16 shows a MFC actuator attached to a 1.8-meter diameter Kapton torus, while the entire torus is seen in Figure 17.
Figure 16: MFC Actuator on Kapton Torus
Figure 17: 1.8-meter Kapton torus
Two significant findings are presented here. First, MFC patches were found to possess excellent strain sensing capabilities compared to conventional PVDF sensors. Also, control systems using MFCs as actuators and sensors were shown to significantly reduce vibration levels in the torus. In one experiment, a control system was designed to control the first out-of-plane mode of the torus using one MFC patch as a sensor and one as an actuator. Figure 18 shows a significant reduction in vibration level using a positive position feedback (PPF) filter. Secondly, a FRF was taken using a shaker input both with and without the PPF filter turned on. Figure 19 shows an 80% reduction in magnitude as observed by the MFC sensor in the frequency domain.
426

Figure 18: MFC Control of First Out-of-Plane Mode of
Inflated Torus
Figure 19: FRF for Shaker Input With and Without MFC
PPF Filter 3.4 Hollow Tube Active Fiber Composites At this point, hollow tube fiber actuators are in the feasibility study phase of development. However, they require much lower operating voltages and are not limited to electrically non-conductive polymer matrix materials. Thus, these devices will likely be applied to similar aerospace applications in the near future. 4 Conclusion With the wide variety of high tech devices in operation today, such as planes, helicopters and satellites, the ability to control potentially damaging structural vibrations becomes increasingly important. Composite elements that employ active fibers offer many advantages over traditional monolithic piezoelectric devices such as increased actuation authority, flexibility and the ability to impose twisting deformation onto a structure. The current investigation has presented the manufacturing procedures for four different types of composite actuators employing active fibers. Additionally, several industrial applications for these active materials have been discussed. It is obvious that these devices can both sense and control various types of structural disturbances, while offering many advantages over traditional piezoelectrics. While much of the work with these devices is currently at the research and development level, they hold a great deal of potential for commercial and industrial applications.
Acknowledgements The Air Force Office of Scientific Research (AFOSR) supported this research effort under grant number F49620-99-1-0231. Also, the NASA Langley Research Center provided specific funding for the study of Macro Fiber Composites under grant number NASA LaRC 01-1103. Additionally, the NASA Virginia Space Grant Consortium provides funding for R. Brett Williams while he completes his graduate education. The financial and technological support of these organizations is gratefully acknowledged. References [1] Tzou, H. S., Ye, R. and Ding, J. H., “A New X-Actuator
Design for Dual Bending/Twisting Control of Wings,” Journal of Sound and Vibration, Vol. 241, no. 2, 2001, p. 271-281.
[2] Wilkie, W. K., Bryant, G. R., High, J. W. et al., “Low-Cost Piezocomposite Actuator for Structural Control Applications,” Proceedings, SPIE 7th Annual International Symposium on Smart Structures and Materials, Newport Beach, CA, March 5-9, 2000.
[3] http://www.smart-materials.com [4] http://amsl.mit.edu/ [5] Bent, A. A., Hagood, N. W., and Rodgers, J. P.,
“Anisotropic Actuation with Piezoelectric Fiber Composites,” Journal of Intelligent Material Systems and Structures, Vol. 6, May 1995.
[6] Bent, A. A., Hagood, N. W., and Rodgers, J. P., “Anisotropic Actuation with Piezoelectric Fiber Composites,” Presented at the Fourth International Conference on Adaptive Structures, Nov. 2-4, 1993, Cologne, Federal Republic Of Germany.
[7] Bent, A. A. and Hagood, N. W., “Development of Piezoelectric Fiber Composites for Structural Actuation,” AIAA Paper No. 93-1717-CP, 34th AIAA/ASME/ASCE/AH SDM conference, La Jolla, CA, April 1993, pp3625-3638.
[8] Bent, A. A., “Piezoelectric Fiber Composites for Structural Actuation,” Master of Science Thesis, Massachusetts Institute of Technology, January 1994.
[9] Bent, A. A., “Active Fiber Composites for Structural Actuation,” Doctor of Philosophy Dissertation, Massachusetts Institute of Technology, January 1997.
[10] Janos, B. Z. and Hagood, N. W., “Overview of Active Fiber Composites Technologies,” Proceedings of the 6th International Conference on New Actuators – ACTUATOR 98, June 98, Bremen, Germany.
[11] “High-Performance, Durable Actuators for Demanding Applications,” NASA Technology Opportunity Announcement
[12] Wilkie, W. K., Bryant, G. R., High, J. W. et al., “NASA-Langley Research Center Macro-Figer Composite Actuator (LaRC-MFC): Technical Overview,”
[13] Flinn, E. D., “Helicopter blades with a new twist,” Aerospace America, vol. 37, no. 9, Sept 1999 p. 40-43.
[14] Petit, C. W., “Up, up and away – Future flying machines will be faster and more birdlike,” U.S. News & World Report, May 21, 2001, pp 46-47.
[15] Cannon, B. J., and Brei, Diann, “Feasibility Study of Microfabrication by Coextrusion (MFCX) Hollow Fibers for Active Composites,” Journal of Intelligent Material Systems and Structures, Vol. 11, September 2000, p. 659-670.
427