
An introduction to particle methods in mathematical finance
56
An introduction to particle methods in mathematical finance Peng Hu October 10-12, 2012, Paris joint work with: R. Carmona, P. Del Moral & N. Oudjane
Transcript of An introduction to particle methods in mathematical finance

An introduction to particle methods in mathematicalfinance
Peng Hu
October 10-12, 2012, Paris
joint work with: R. Carmona, P. Del Moral & N. Oudjane

Feynman-Kac models & Particle interpretationsPath integration measuresBackward Markov chain mododelMean field particle modelsGenealogical tree & Unnormalized modelsBackward particle Markov chain models
Applications in mathematical finance
Some exponential concentration estimates + References

Basic notation
P(E ) probability meas., B(E ) bounded functions on E .
I (µ, f ) ∈ P(E )× B(E ) −→ µ(f ) =
∫µ(dx) f (x)
I Q(x1, dx2) integral operators x1 ∈ E1 x2 ∈ E2
Q(f )(x1) =
∫Q(x1, dx2)f (x2)
[µQ](dx2) =
∫µ(dx1)Q(x1, dx2) (=⇒ [µQ](f ) = µ[Q(f )] )
I Boltzmann-Gibbs transformation
[Positive and bounded potential function G ]
µ(dx) 7→ ΨG (µ)(dx) =1
µ(G )G (x) µ(dx)

Feynman-Kac measures
I Markov chain Xn on En, with transitions Mn :
Pn (d(x0, . . . , xn)) = η0(dx0)M1(x0, dx1) . . .Mn(xn−1, dxn)
I Regular potential functions Gn(xn) ∈ R+
dQn :=1
Zn
∏0≤p<n
Gp(Xp)
dPn
⊃ Continuous time models
Xn := X ′[tn,tn+1[& Gn(Xn) = exp
∫ tn+1
tn[V (X ′s )ds + W (X ′s )dBs ]
Xn = X ′tn & Gn(Xn) = exp[V (Xn) ∆t + W (Xn)
√∆t Nn(0, 1)
]

Feynman-Kac measures
I Markov chain Xn on En, with transitions Mn :
Pn (d(x0, . . . , xn)) = η0(dx0)M1(x0, dx1) . . .Mn(xn−1, dxn)
I Regular potential functions Gn(xn) ∈ R+
dQn :=1
Zn
∏0≤p<n
Gp(Xp)
dPn
⊃ Continuous time models
Xn := X ′[tn,tn+1[& Gn(Xn) = exp
∫ tn+1
tn[V (X ′s )ds + W (X ′s )dBs ]
Xn = X ′tn & Gn(Xn) = exp[V (Xn) ∆t + W (Xn)
√∆t Nn(0, 1)
]

The n-th time marginal measures
ηn(f ) = γn(f )/γn(1) with γn(f ) := E
f (Xn)∏
0≤p<n
Gp(Xp)
3 Important observations
I Time marginal measures = Path space measures:
[ Xn := (X0, . . . ,Xn) & Gn(Xn) := Gn(Xn)]
and
γn(fn) = E
fn(Xn)∏
0≤p<n
Gp(Xp)
⇒ ηn = Qn
I Unnormalized measures:
γn(fn) = E
fn(Xn)∏
0≤p<n
Gp(Xp)
= ηn(fn)∏
0≤p<n
ηp(Gp)

I Backward Markov chain model :
Regularity condition
Gn(x) Mn+1(x , dy) = Hn+1(x , y)λn+1(dy)
⇓
Backward formulae
Qn(d(x0, . . . , xn)) = ηn(dxn) Mn,ηn−1(xn, dxn−1) . . .M1,η0(x1, dx0)
with the dual/backward Markov transitions
Mn+1,ηn (xn+1, dxn) =ηn(dxn) Hn+1(xn, xn+1)
ηn(Hn+1(., xn+1))

Mean field particle algorithms
I Nonlinear ”Markov” transport equation ([0, 1]-valued fct. Gn)
ηn+1 = ηnKn+1,ηn = Law(X n+1) with Kn+1,ηn = Sn,ηn Mn+1
and
Sn,ηn (x , dy) := Gn(x) δx(dy) + (1− Gn(x)) ΨGn (ηn)(dy)
I N-particle model = Markov chain ξn = (ξin)1≤i≤N such that
ηNn :=
1
N
∑1≤i≤N
δξin−→N↑∞ ηn
Mean field dynamic population model
P(ξn+1 ∈ d(x1, . . . , xN) | ξn
)=
∏1≤i≤N
Kn+1,ηNn
(ξin−1, dx i )

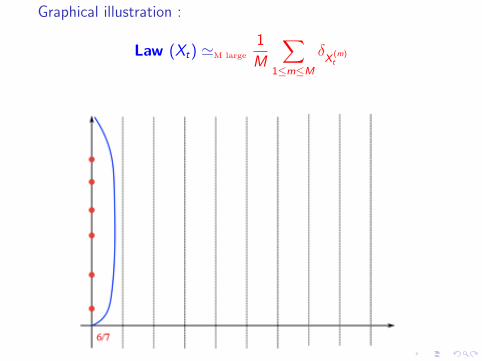
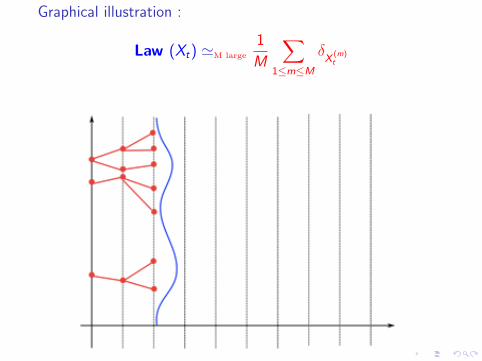
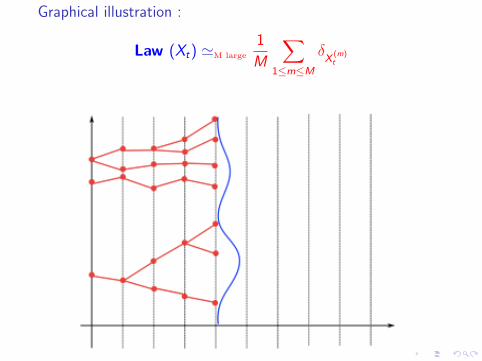
Graphical illustration :
Law (Xt) 'M large
1
M
∑1≤m≤M
δX
(m)t
Graphical illustration :
Law (Xt) 'M large
1
M
∑1≤m≤M
δX
(m)t

Graphical illustration :
Law (Xt) 'M large
1
M
∑1≤m≤M
δX
(m)t

Graphical illustration :
Law (Xt) 'M large
1
M
∑1≤m≤M
δX
(m)t
Graphical illustration :
Law (Xt) 'M large
1
M
∑1≤m≤M
δX
(m)t

Graphical illustration :
Law (Xt) 'M large
1
M
∑1≤m≤M
δX
(m)t

Graphical illustration :
Law (Xt) 'M large
1
M
∑1≤m≤M
δX
(m)t

Graphical illustration :
Law (Xt) 'M large
1
M
∑1≤m≤M
δX
(m)t
Graphical illustration :
Law (Xt) 'M large
1
M
∑1≤m≤M
δX
(m)t

Graphical illustration :
Law (Xt) 'M large
1
M
∑1≤m≤M
δX
(m)t

Graphical illustration :
Law (Xt) 'M large
1
M
∑1≤m≤M
δX
(m)t

Graphical illustration :
Law (Xt) 'M large
1
M
∑1≤m≤M
δX
(m)t

Graphical illustration :
Law (Xt) 'M large
1
M
∑1≤m≤M
δX
(m)t

Graphical illustration :
Law (Xt) 'M large
1
M
∑1≤m≤M
δX
(m)t

Graphical illustration :
Law (Xt) 'M large
1
M
∑1≤m≤M
δX
(m)t

Graphical illustration :
Law (Xt) 'M large
1
M
∑1≤m≤M
δX
(m)t

Graphical illustration :
Law (Xt) 'M large
1
M
∑1≤m≤M
δX
(m)t

Graphical illustration :
Law (Xt) 'M large
1
M
∑1≤m≤M
δX
(m)t

Graphical illustration :
Law (Xt) 'M large
1
M
∑1≤m≤M
δX
(m)t

I Genealogical tree model
1
N
∑1≤i≤N
δ(ξi0,n, ξ
i1,n, . . . , ξ
in,n
)︸ ︷︷ ︸i-th ancestral line
−→N→∞ Qn
Note : MCMC regularization of the tree
Qn+1path-space
= ηn+1 = ηn+1Ln+1 −→ ηn+1 = ηnKn+1,ηn Ln+1

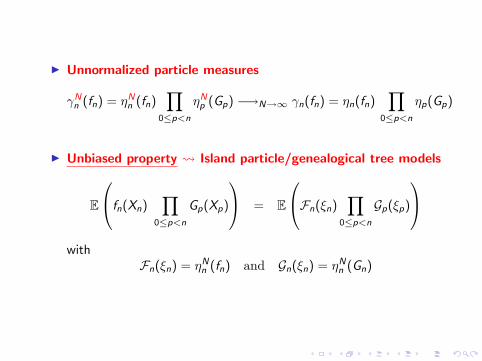
I Unnormalized particle measures
γNn (fn) = ηN
n (fn)∏
0≤p<n
ηNp (Gp) −→N→∞ γn(fn) = ηn(fn)
∏0≤p<n
ηp(Gp)
I Unbiased property Island particle/genealogical tree models
E
fn(Xn)∏
0≤p<n
Gp(Xp)
= E
Fn(ξn)∏
0≤p<n
Gp(ξp)
with
Fn(ξn) = ηNn (fn) and Gn(ξn) = ηN
n (Gn)
I Unnormalized particle measures
γNn (fn) = ηN
n (fn)∏
0≤p<n
ηNp (Gp) −→N→∞ γn(fn) = ηn(fn)
∏0≤p<n
ηp(Gp)
I Unbiased property Island particle/genealogical tree models
E
fn(Xn)∏
0≤p<n
Gp(Xp)
= E
Fn(ξn)∏
0≤p<n
Gp(ξp)
with
Fn(ξn) = ηNn (fn) and Gn(ξn) = ηN
n (Gn)
I Backward particle Markov chain measures
QNn (d(x0, . . . , xn)) := ηN
n (dxn) Mn,ηNn−1
(xn, dxn−1) . . .M1,ηN0
(x1, dx0)
with the random particle matrices:
Mn+1,ηNn
(xn+1, dxn) ∝ ηNn (dxn) Hn+1(xn, xn+1)
Finite state spaces
[{ξ0} ← {ξ1} ← . . .← {ξn}] = Complete ancestral tree
Example: Normalized additive functionals
fn(x0, . . . , xn) =1
n + 1
∑0≤p≤n
fp(xp)
⇓
QNn (fn) :=
1
n + 1
∑0≤p≤n
ηNn Mn,ηN
n−1. . .Mp+1,ηN
p(fp)︸ ︷︷ ︸
matrix operations

I Backward particle Markov chain measures
QNn (d(x0, . . . , xn)) := ηN
n (dxn) Mn,ηNn−1
(xn, dxn−1) . . .M1,ηN0
(x1, dx0)
with the random particle matrices:
Mn+1,ηNn
(xn+1, dxn) ∝ ηNn (dxn) Hn+1(xn, xn+1)
Finite state spaces
[{ξ0} ← {ξ1} ← . . .← {ξn}] = Complete ancestral tree
Example: Normalized additive functionals
fn(x0, . . . , xn) =1
n + 1
∑0≤p≤n
fp(xp)
⇓
QNn (fn) :=
1
n + 1
∑0≤p≤n
ηNn Mn,ηN
n−1. . .Mp+1,ηN
p(fp)︸ ︷︷ ︸
matrix operations

I Backward particle Markov chain measures
QNn (d(x0, . . . , xn)) := ηN
n (dxn) Mn,ηNn−1
(xn, dxn−1) . . .M1,ηN0
(x1, dx0)
with the random particle matrices:
Mn+1,ηNn
(xn+1, dxn) ∝ ηNn (dxn) Hn+1(xn, xn+1)
Finite state spaces
[{ξ0} ← {ξ1} ← . . .← {ξn}] = Complete ancestral tree
Example: Normalized additive functionals
fn(x0, . . . , xn) =1
n + 1
∑0≤p≤n
fp(xp)
⇓
QNn (fn) :=
1
n + 1
∑0≤p≤n
ηNn Mn,ηN
n−1. . .Mp+1,ηN
p(fp)︸ ︷︷ ︸
matrix operations

Matrix
Mn,ηNn−1
:=
Mn,ηNn−1
(ξ1n , ξ
1n−1) · · · Mn,ηN
n−1(ξ1
n , ξNn−1)
......
...Mn,ηN
n−1(ξN
n , ξ1n−1) · · · Mn,ηN
n−1(ξN
n , ξNn−1)
,
with the (i , j)-entry Mn,ηNn−1
(ξin, ξ
jn−1) defined by:
Mn,ηNn−1
(ξin, ξ
jn−1) =
Gn−1(ξjn−1)Hn(ξj
n−1, ξin)∑N
k=1 Gn−1(ξkn−1)Hn(ξk
n−1, ξin).

Feynman-Kac models & Particle interpretations
Applications in mathematical financePartial observation problemsStoch. interest rates, barriers, lookback style optionsAmerican optionsRisk analysis (Credit portfolio losses)Sensitivity measures (Greeks computation)
Some exponential concentration estimates + References

Partial observation problems (volatility, asset prices, kinetic parameters)
I Filtering models Xn Yn partial observation Gn(xn) = p(yn|xn)
Qn = Law((X0, . . . ,Xn) | ∀0 ≤ p < n Yp = yp)Zn+1 = pn(y0, . . . , yn)
Particle filters
I Fixed parameter estimation in HMM models
dp(θ | (y0, . . . , yn)) ∝ p((y0, . . . , yn) | θ) dp(θ)
= Zn+1(θ) dp(θ) =
∏0≤p≤n
ηθ,p(Gp)
dp(θ)
or the extended law with the same θ-marginal
dp(ξ, θ | (y0, . . . , yn)) ∝
∏0≤p≤n
ηNθ,p(Gp)
dp(ξ, θ)
Particle MCMC or FK particle algo. with MCMC ”mutations”
Partial observation problems (volatility, asset prices, kinetic parameters)
I Filtering models Xn Yn partial observation Gn(xn) = p(yn|xn)
Qn = Law((X0, . . . ,Xn) | ∀0 ≤ p < n Yp = yp)Zn+1 = pn(y0, . . . , yn)
Particle filters
I Fixed parameter estimation in HMM models
dp(θ | (y0, . . . , yn)) ∝ p((y0, . . . , yn) | θ) dp(θ)
= Zn+1(θ) dp(θ) =
∏0≤p≤n
ηθ,p(Gp)
dp(θ)
or the extended law with the same θ-marginal
dp(ξ, θ | (y0, . . . , yn)) ∝
∏0≤p≤n
ηNθ,p(Gp)
dp(ξ, θ)
Particle MCMC or FK particle algo. with MCMC ”mutations”
Partial observation problems (continued)
I Standard tool in stochastic optimal control with partial obs
Perfect obs Partial obs = Perfect obs in distribution space
I Key functional formula
E (fn(Xn,Yn) |Y0, . . . ,Yp ) = E (Fn(Xn) |X0, . . . ,Xp )
with the ”perfectly observed” Markov chain
Xn =(
Yn, η[Y ]n
)& Fn(Xn) =
∫fn(xn,Yn) Ψp(Yn|.)
(η[Y ]
n
)(dxn)
Replace Xn Particle model XNn =
(Y N
n , η[N,Y ]n
)

Stoch. interest rates, barriers, Lookback style options
I European call options with stoch. interest rates & barriers
fn(Xn) = (Xn − K )+ and Gn(Xn) = 1An (Xn) exp (−rn(Xn))
I Lookback style options
fn(Xn) = (Hn(Xn)− K )+ with Xn = (S0, . . . ,Sn)
Examples: 1-d Asian call option with fixed or floating strike
Hn(Xn) =1
n + 1
n∑p=0
Sp or K = 0 & Hn(Xn) =1
n + 1
n∑p=0
Sp − Sn

American optionsNotation-hypothesis :
Qn+1(x , dy) = Gn(x) Mn+1(x , dy)hyp.= Hn+1(x , y) λ(dy)
Optimal stopping time pb. supT≤n
E
fT (XT )∏
0≤p<T
Gp(Xp)
∼ Solution:
T ? = inf {0 ≤ p ≤ n : Up(Xp) ≤ fp(Xp)}
with the Snell envelop backward equation (Un = fn) :
Up(x) = fp(x) ∨∫ηp+1(dy)
dQp+1(x , .)
dηp+1(y) Up+1(y)
' fp(x) ∨ ηNp (Gp)
∫ηN
p+1(dy)Hp+1(x , y)
ηNp (Hp+1(., y))
Up+1(y)
Nb: Gn = 1 Broadie-Glasserman Monte Carlo model

American options
Variance comparison for the pricing of deep out-of-the-moneyput
Payoff K d = 1 d = 2 d = 3 d = 4 d = 5Geometric 0.95 1 1 1 1 1
Put 0.85 5 8 6 4 30.75 18 28 18 16 11
Arithmetic 0.95 1 3 3 4 5Put 0.85 5 13 24 56 100
0.75 18 71 363 866 −
Table: Variance ratio computed over 1000 runs for N = 3200 meshpoints.

American options
(a) Geometric Put with d = 4 (b) Arithmetic Put with d = 4
(c) Geometric Put with d = 5 (d) Arithmetic Put with d = 5

Risk analysis & Default tree models
Typical problem
P(Vn(Xn) ≥ a) & Law(Xn | Vn(Xn) ≥ a) ?
Importance sampling formulae:
P(Vn(Xn) ≥ a) = E
fn(Xn)∏
0≤p<n
Gp(Xp)
with the Markov chain Xn = (Xn,Xn+1) and the functions
fn(Xn) = 1Vn(Xn)≥a e−αVn(Xn) & Gp(Xp) = eα(Vp+1(Xp+1)−Vp(Xp))
Particle Importance sampling models ⊕ Default tree models

Risk analysis & Default tree models
Default distribution of a portfolio of 125 stocks

Risk analysis & Default tree models
Default distribution of a portfolio of 125 stocks

Kinetic parameter derivatives
Derivation FK models = FK Integration w.r.t. additive functionals
θ ∈ Rd=1 7→ Qθn (xn−1, dxn) = G θ
n−1(x) Mθn (x , dy) = Hθ
n (xn−1, xn) λn(dxn)
⇒ ∂
∂θE
fn(X θ0 , . . . ,X
θn )
∏0≤p<n
G θp (X θ
p )
∝ Qθn(fn × Γθn)
with the additive functional
Γθn(x0, . . . , xn) =∑
1≤p≤n
∂
∂θlog Hθ
p (xp−1, xp)
Particle backward Markov chains or Genealogical tree models

Parameter derivatives (continued)
I Greeks computation: (vega,rho) = (volatility,drift) θ-variations
I θ-variations of barrier levels or smooth penalty type functions:
d = 1 & a smooth θ 7→ (G θn ,M
θn ) = (G θ
n ,Mn)
∂
∂θlogZθn = Qθ
n(Γθn) &∂
∂θQθ
n(fn) = Qθn(fn
[Γθn −Qθ
n(Γθn)])
with the additive functional
Γθn(x0, . . . , xn) =∑
0≤p<n
∂
∂θlog G θ
p (xp)
Markov semigroup derivation (delta)
Pn(f )(x) := E (f (Xn(x)))
withXn+1(x) = Fn(Xn(x),Wn) X0(x) = x
⇓
1st order variational equation (d=1)
∂Xn
∂x=∂Fn−1
∂x(Xn−1,Wn−1)
∂Xn−1
∂x=
∏0≤p<n
Gp(Xp,Wp)
FK-representation formula
∇Pn(f )(x) := Ex
∇f (Xn)∏
0≤p<n
Gp(Xp,Wp)
d > 1 Noncommutative models sequential proj. on the unit sphere

Feynman-Kac models & Particle interpretations
Applications in mathematical finance
Some exponential concentration estimates + References

Cts (c1, c2) ∼ (bias,variance), independent of the time parameterTest functions ‖fn‖ ∨ ‖fn‖ ≤ 1, c universal constant, ε ∈ {−1,+1}
∀ (x ≥ 0, n ≥ 0,N ≥ 1), the probability of any of the following events isgreater than 1− e−x
[ηN
n − ηn
](fn) ≤ c1
N
(1 + x +
√x)
+c2√N
√x
ε
nlogZN
n
Zn≤ c1
N
(1 + x +
√x)
+c2√N
√x
[ηN
n −Qn
](fn) ≤ c1
n + 1
N
(1 + x +
√x)
+ c2
√(n + 1)
N
√x
Nb: Similar results at the empirical process level over classes of functions

Cts (c1, c2) ∼ (bias,variance), independent of the time parameterTest functions ‖fn‖ ∨ ‖fn‖ ≤ 1, c universal constant, ε ∈ {−1,+1}
∀ (x ≥ 0, n ≥ 0,N ≥ 1), the probability of any of the following events isgreater than 1− e−x
[ηN
n − ηn
](fn) ≤ c1
N
(1 + x +
√x)
+c2√N
√x
ε
nlogZN
n
Zn≤ c1
N
(1 + x +
√x)
+c2√N
√x
[ηN
n −Qn
](fn) ≤ c1
n + 1
N
(1 + x +
√x)
+ c2
√(n + 1)
N
√x
Nb: Similar results at the empirical process level over classes of functions

Cts (c1, c2) ∼ (bias,variance), independent of the time parameterTest functions ‖fn‖ ∨ ‖fn‖ ≤ 1, c universal constant, ε ∈ {−1,+1}
∀ (x ≥ 0, n ≥ 0,N ≥ 1), the probability of any of the following events isgreater than 1− e−x
[ηN
n − ηn
](fn) ≤ c1
N
(1 + x +
√x)
+c2√N
√x
ε
nlogZN
n
Zn≤ c1
N
(1 + x +
√x)
+c2√N
√x
[ηN
n −Qn
](fn) ≤ c1
n + 1
N
(1 + x +
√x)
+ c2
√(n + 1)
N
√x
Nb: Similar results at the empirical process level over classes of functions

Cts (c1, c2) ∼ (bias,variance), independent of the time parameterTest functions ‖fn‖ ∨ ‖fn‖ ≤ 1, c universal constant, ε ∈ {−1,+1}
∀ (x ≥ 0, n ≥ 0,N ≥ 1), the probability of any of the following events isgreater than 1− e−x
[ηN
n − ηn
](fn) ≤ c1
N
(1 + x +
√x)
+c2√N
√x
ε
nlogZN
n
Zn≤ c1
N
(1 + x +
√x)
+c2√N
√x
[ηN
n −Qn
](fn) ≤ c1
n + 1
N
(1 + x +
√x)
+ c2
√(n + 1)
N
√x
Nb: Similar results at the empirical process level over classes of functions

Backward particle models
Cts (c1, c2) ∼ (bias,variance), independent of the time parameterfn normalized additive functional with ‖fp‖ ≤ 1, c universal constant
∀ (x ≥ 0, n ≥ 0,N ≥ 1), the probability of any of the following events isgreater than 1− e−x
[QN
n −Qn
](fn) ≤ c1
1
N(1 + (x +
√x)) + c2
√x
N(n + 1)
and
supa∈Rd
∣∣QNn (fa,n)−Qn(fa,n)
∣∣ ≤ c
√d
N(x + 1)
with fa,n normalized additive functional w.r.t. fp = 1(−∞,a], a ∈ Rd = En
.

Backward particle models
Cts (c1, c2) ∼ (bias,variance), independent of the time parameterfn normalized additive functional with ‖fp‖ ≤ 1, c universal constant
∀ (x ≥ 0, n ≥ 0,N ≥ 1), the probability of any of the following events isgreater than 1− e−x
[QN
n −Qn
](fn) ≤ c1
1
N(1 + (x +
√x)) + c2
√x
N(n + 1)
and
supa∈Rd
∣∣QNn (fa,n)−Qn(fa,n)
∣∣ ≤ c
√d
N(x + 1)
with fa,n normalized additive functional w.r.t. fp = 1(−∞,a], a ∈ Rd = En
.

ReferencesI joint work with R. Carmona, P. Del Moral and N. Oudjane, An introduction to particle methods in
Finance. Numerical Methods in Finance, Springer (2012).
I joint work with P. Del Moral and L. Wu, On the concentration properties of Interacting particleprocesses, Foundations and Trends in Machine Learning, vol. 3, nos. 3–4, pp. 225–389, 2012.
I joint work with P. Del Moral, N. Oudjane, Br. Remillard. On the Robustness of the Snell envelope.SIAM J. Finan. Math., Vol. 2, pp. 587–626 , 2011.
I joint work with P. Del Moral, N. Oudjane, Snell envelope with small probability criteria, to appear inApplied Mathematics & Optimization.
I R.Carmona, S. Crepey. Importance sampling and interacting particle systems for the estimation ofcredit portfolios loss distribution. International Journal of Theoretical and Applied Finance, to appear(2011).
I R. Carmona, J.-P. Fouque, and D. Vestal. Interacting particle systems for the computation of rarecredit portfolio losses, Finance and Stochastics, vol. 13, no. 4, pp. 613-633 (2009).Particle Markov chain Monte Carlo methods. (with discussion), Journal Royal Statistical Society B.,vol. 72, no. 3, pp. 269-342 (2010).
I P. Del Moral, A. Doucet and A. Jasra. Sequential Monte Carlo samplers. J. Royal Statist. Soc. B,vol. 68, pp. 411–436, 2006.
I P. Del Moral and J. Garnier. Genealogical particle analysis of rare events. Annals of AppliedProbability, vol. 15, no. 4, pp. 2496-2534 (2005).
I P. Del Moral, A.Doucet, S.S.Singh, A Backward Particle Interpretation of Feynman-Kac Formulae.M2AN, 44(5), pp. 947-976 (2010).
I P. Del Moral, A.Doucet, S.S.Singh, Uniform Stability of a Particle Approximation of the Optimal FilterDerivative http://arxiv.org/abs/1106.2525 (2011).
I P. Del Moral and E. Rio. Concentration Inequalities for Mean Field Particle Models. Annals of AppliedProbability, vol.21, no.3, pp.1017-1052 (2011).
I P. Del Moral, Feynman-Kac Formulae: Genealogical and Interacting Particle Systems with Applications,Springer-Verlag, Series Probability & Applications (2004).
I P. Del Moral and A. Doucet. Sequential Monte Carlo and Genetic particle models. Theory andPractice. Chapman & Hall, Series Statistics & Applied Probability (2012).


















