An improved Lewis-Milne equation for the advance phase of border irrigation
6
Irrig Sci (1990) 11:1-6 Irrigation clence Springer-Verlag 1990 An improved Lewis-Milne equation for the advance phase of border irrigation V. P. Singh ~, P. D. Scarlatos 2, and S. N. Prasad 3 1 Department of Civil Engineering, Louisiana State University, Baton Rouge, LA 70803, USA , South Florida Water Management District, 3301 Gun Club Road, P.O. Box 24680, West Palm Beach, FL 33416, USA 3 Department of Civil Engineering, University of Mississippi, University, MS 38677, USA Received October 6, 1988 Summary. The Lewis-Milne (LM) equation has been widely applied for design of border irrigation systems. This equation is based on the concept of mass conser- vation while the momentum balance is replaced by the assumption of a constant surface water depth, Al- though this constant water depth depends on the in- flow rate, slope and roughness of the infiltrating sur- face, no explicit relation has been derived for its estimation. Assuming negligible border slope, the pres- ent study theoretically treats the constant depth in the LM equation by utilizing the simple dam-break wave solution along with boundary layer theory. The wave front is analyzed separately from the rest of the advancing water by considering both friction and infil- tration effects on the momentum balance. The result- ing equations in their general form are too complicat- ed for closed-form solutions. Solutions are therefore given for specialized cases and the mean depth of flow is presented as a function of the initial water depth at the inlet, the surface roughness and the rate of infiltra- tion. The solution is calibrated and tested using exper- imental data. For efficient design and operation of surface irrigation systems it is essential to know the dynamics of water movement over the infiltrating soil surface. Theoreti- cally, the problem can be simulated by the mass conti- nuity and momentum balance hydrodynamic equa- tions. However, simpler approaches are also feasible, which utilize the mass continuity equation, and re- place the momentum balance equation with an empir- Abbreviations. a(t)=advance length, c=mean depth in LM equation, cy =friction factor, Ch=Chezy's friction coefficient, g = acceleration due to gravity, h(x, t)= water depth, h o = water depth at the upstream end, i(z)=rate of infiltration f(x, t)= discharge, qo = constant inflow discharge, Sy = energy loss gradi- ent or frictional slope, So=bed slope, t=time, u(x, t)=mean velocity along the water depth, x=distance, Y(z)=cumulative infiltration, r/(t)= distance separating two flow regions, ~= infil- tration opportunity time. ical relation. One such simplified approach is the well- known work of Lewis and Milne (1938). By assuming constant rate of inflow and mean constant depth of surface water, Lewis and Milne (LM) developed an integral equation for solution of irrigation advance phase. Analytical solutions of the LM equation for various infiltration functions were provided by Philip and Farrell (1964) and Parlange (1973). Most studies dealing with the LM equation treat the mean surface water depth as constant despite the fact that from field and experimental observations, it has been documented that this depth depends on in- flow discharge, slope, surface roughness and infiltra- tion. An attempt to relate the mean depth to certain physical quantities was made by Singh and Prasad (1983). This paper is an improvement and verification of their work. The physical processes of surface flow over an infil- trating surface constitute a very complicated and not yet fully understood system. The system is generally time-dependent, three-dimensional, nonlinear, inho- mogeneous, anisotropic, and involves free boundaries. Therefore, even a full hydrodynamic model is only an approximation of the real-life situation. Considering the effectiveness of the LM equation, it may be worth- while to investigate the parameters of this simple model for simulation of irrigation advance phase, which constitutes the objective of this study. The stor- age and recession irrigation phases are not included in the analysis. The water flow over an irrigation border can be viewed as a shallow water wave propagating down- stream with certain phase velocity. The water depth varies from maximum at the inlet to zero right at the wave front tip. Due to its small depth, the motion of the wave front is dominated by the effects of surface friction and the resulting turbulence, and of the water mass losses through infiltration into dry soil. For the rest of the flow, it is assumed that the dominating effects are the inertia forces so that a frictionless system
Transcript of An improved Lewis-Milne equation for the advance phase of border irrigation

Irrig Sci (1990) 11:1-6 Irrigation
clence �9 Springer-Verlag 1990
An improved Lewis-Milne equation for the advance phase of border irrigation V. P. Singh ~, P. D. Scarlatos 2, and S. N. Prasad 3
1 Department of Civil Engineering, Louisiana State University, Baton Rouge, LA 70803, USA , South Florida Water Management District, 3301 Gun Club Road, P.O. Box 24680, West Palm Beach, FL 33416, USA 3 Department of Civil Engineering, University of Mississippi, University, MS 38677, USA
Received October 6, 1988
Summary. The Lewis-Milne (LM) equation has been widely applied for design of border irrigation systems. This equation is based on the concept of mass conser- vation while the momentum balance is replaced by the assumption of a constant surface water depth, Al- though this constant water depth depends on the in- flow rate, slope and roughness of the infiltrating sur- face, no explicit relation has been derived for its estimation. Assuming negligible border slope, the pres- ent study theoretically treats the constant depth in the LM equation by utilizing the simple dam-break wave solution along with boundary layer theory. The wave front is analyzed separately from the rest of the advancing water by considering both friction and infil- tration effects on the momentum balance. The result- ing equations in their general form are too complicat- ed for closed-form solutions. Solutions are therefore given for specialized cases and the mean depth of flow is presented as a function of the initial water depth at the inlet, the surface roughness and the rate of infiltra- tion. The solution is calibrated and tested using exper- imental data.
For efficient design and operation of surface irrigation systems it is essential to know the dynamics of water movement over the infiltrating soil surface. Theoreti- cally, the problem can be simulated by the mass conti- nuity and momentum balance hydrodynamic equa- tions. However, simpler approaches are also feasible, which utilize the mass continuity equation, and re- place the momentum balance equation with an empir-
Abbreviations. a(t)=advance length, c=mean depth in LM equation, cy =friction factor, Ch=Chezy's friction coefficient, g = acceleration due to gravity, h(x, t)= water depth, h o = water depth at the upstream end, i(z)=rate of infiltration f(x, t)= discharge, qo = constant inflow discharge, Sy = energy loss gradi- ent or frictional slope, So=bed slope, t=time, u(x, t)=mean velocity along the water depth, x=distance, Y(z)=cumulative infiltration, r/(t)= distance separating two flow regions, ~ = infil- tration opportunity time.
ical relation. One such simplified approach is the well- known work of Lewis and Milne (1938). By assuming constant rate of inflow and mean constant depth of surface water, Lewis and Milne (LM) developed an integral equation for solution of irrigation advance phase. Analytical solutions of the LM equation for various infiltration functions were provided by Philip and Farrell (1964) and Parlange (1973).
Most studies dealing with the LM equation treat the mean surface water depth as constant despite the fact that from field and experimental observations, it has been documented that this depth depends on in- flow discharge, slope, surface roughness and infiltra- tion. An attempt to relate the mean depth to certain physical quantities was made by Singh and Prasad (1983). This paper is an improvement and verification of their work.
The physical processes of surface flow over an infil- trating surface constitute a very complicated and not yet fully understood system. The system is generally time-dependent, three-dimensional, nonlinear, inho- mogeneous, anisotropic, and involves free boundaries. Therefore, even a full hydrodynamic model is only an approximation of the real-life situation. Considering the effectiveness of the LM equation, it may be worth- while to investigate the parameters of this simple model for simulation of irrigation advance phase, which constitutes the objective of this study. The stor- age and recession irrigation phases are not included in the analysis.
The water flow over an irrigation border can be viewed as a shallow water wave propagating down- stream with certain phase velocity. The water depth varies from maximum at the inlet to zero right at the wave front tip. Due to its small depth, the motion of the wave front is dominated by the effects of surface friction and the resulting turbulence, and of the water mass losses through infiltration into dry soil. For the rest of the flow, it is assumed that the dominating effects are the inertia forces so that a frictionless system

V. P. Singh et al.
is utilized. Therefore, the flow domain can be subdivid- ed into main flow and tip flow regions. Each region is treated separately but the solutions are matched for continuity. The resulting equations are very compli- cated for analytical treatment. Therefore, closed-form solutions are provided under limiting conditions. The solutions are tested using existing experimental data.
General equations for border irrigation
The general equations that describe one-dimensional, free-surface flow over an infiltrating plane can be written as
Continuity:
h.,+(hu).x+i[x, t -z (x) ] = 0 (1)
Momentum balance:
u . , + u u . x + g h , - g ( S o - S i ) = 0 (2)
where h is the water depth, u is the mean velocity along the water depth, i is the rate of infiltration, So is the bed slope, S I is the energy loss gradient, g is the accelera- tion due to gravity, x is the distance, t is the continuous time and z is the infiltration opportunity time. Comma in front of a subscript variable denotes partial differen- tiation with respect to that variable. Under the as- sumption of an initially dry bed, the initial conditions are given as
u(x, O) = h(x, 0) = 0, x > 0 . (3)
For constant inflow discharge qo, the boundary condi- tions are
q (0, t) = h (0, t) u (0, t) = qo. (4)
Equations (1) to (4) constitute a system of nonlinear, partial differential equations of the hyperbolic type for which no general solution is known. Numerical solu- tions of these equations were presented by Bassett (1972), Sakkas and Strelkoff (1974) and Katapodes and Strelkoff(1977). By dropping the two first terms of the momentum equation (Eq.(2)), Strelkoff and Kata- podes (1977) developed the zero inertia model. The case of kinematic wave approach, where all terms but the last term of Eq. (2) were dropped, was thoroughly investigated by Sherman and Singh (1978, 1982).
A well-known solution of Eqs. (1) to (4) was derived in 1892 by Ritter, for the simple dam-break wave, i.e., under the assumption that S o=S z = i = 0 (Stoker 1957). In that case, the solution reads
~ g - h : ~ ( 2 g ~ o - t ) (6)
ho I
1'
MAIN _L TIP FLOW V FLOW -- I
REGION REGION
Fig. 1. Simple dam-break wave
X
where h o is the initial water surface. In the x-t plane, both u and x are constants along the characteristics passing through the origin. The wave front travels with a constant speed of 2 gx/~o. At the origin (x = 0), the velocity Uo and the water height h(0, t) are given re- spectively as
_ 2 ,,/g ho (7) Uo -- 5
h (0, t) = 4 h o (8)
It should be noted that the original depth h o is moving upstream from the origin due to dam-breaking flow effects. The discharge at x = 0 is constant and equal to
q(O, t) = u o h(O, t) = 2~ ho x/g ho (9)
A schematic representation of the simple wave solu- tion characteristics and the separation of flow regions is given in Fig. 1.
Lewis-Milne equation
Based on Eq. (1), Lewis and Milne (1938) were the first to develop an integral equation for estimation of the advance length in border irrigation written as
t
qot = ca+ S Y( t - -z ) da o dzz dz (10)
where c is the constant mean depth, a is the advance length and Y is the cumulative infiltration function. Eq. (10) does not include the effects of surface friction in spite of the fact that c is a function of various phys- ical characteristics of the system. If a, Y and qo can be expressed in analytical form then from Eq. (10) the mean depth c can be estimated accordingly.

Improved Lewis-Milne equation 3
Theoretical analysis of wave front advance
As mentioned previously, the simple wave front tip at any time t has travelled a theoretical distance of 2 x/9 ho t, with friction and infiltration effects neglect- ed. In the following analysis, the entire flow domain is divided into two separate regions: the main flow re- gion and the tip flow region. In the main region, the frictionless simple wave solutions given by Eqs. (5) and (6) are assumed as valid, i.e., only the flow inertia is considered. In the tip flow region, the effects of friction and infiltration are both included.
Let us assume that the two regions are separated at a distance t/(t), as shown in Fig. 1. At point q (t), the water height and velocity are h~ and u, respectively. Furthermore, due to its small depth, the tip zone can be approximated as having a constant depth h,. Ac- counting for friction, the tip is expected to be delayed from the point 2 9 x ~ o t to the point a (t). Since both u and h should be continuous at x = ~/(t), their magni- tudes can be derived from solutions for the main flow region given by Eqs. (5) and (6). Therefore,
~ - - / 3u~ -1)t " = x/ g h~ ~2 ~ ~ (11)
and
ho( = ( 1 2 ) 2
The total water mass m of both surface and infil- trated water within the tip region is equal to
m = e S h d x + Q 5 Y d x (13) q t/
where No = 2 9 x ~ o t is the distance that a frictionless wave would have traveled within time t, and Q is the water density. For linear variation of the surface and infiltrated water profile through the tip region (lines BC and AD in Fig. 1). Eq. (13) can be rewritten as
a
m=�89 r lydx= 1 2 ~ e [ha (qo - q) + I11 (a-- t/)]
(14)
where I11 is the cumulative infiltration depth at point q(t). The rate of mass flow according to Eqs. (11), (12) and (14) is given as
- : - ( dm 30ho 9 ~ o 1 dt 2 2
90ho g x ~ o 1 2 2 2 9x/~o+5 OY'd
1 (32~ ~ ) 3 2 o r , gv/~o 1 - - ~ e Y ~ t a (15)
da dZa where d=u,= d t ' and 6 = dt ~ .
If M is the momentum of the water mass in the region q (t) < x < a (t), then the change in momentum will be balanced by the external forces of pressure and friction. Therefore, dM dm a 1 dt =u, d t =S0cr d x - ~Qgh 2 (16)
tl
or
dm 1 ul ~ - 0 clu~(a-rl)+ ~ og h 2 = 0 (17)
where c s is a friction coefficient. For the derivation of Eqs. (16) and (17), water pressure was taken as hydro- static, while friction force was assumed as proportion- al to the square power of the velocity. Substitution of Eqs. (11), (12) and (15) into Eq. (17), and some simplifi- cation yield
2 2x~oo +3 ho 2x/gh o
a[_ gho + 1 2 ~ ~ + ~ o o 1 2 -9x/7~o . (18)
Through coupling Eqs. (15) and (17), the effects of the rate of change of the infiltrated water mass are includ- ed in the momentum balance. This is acceptable under the restriction that h I >> Y, and that the infiltrating wa- ter has a small but finite horizontal velocity compo- nent. Using the following variable transformation
1 P =~o(2X/~o t -a )c l (19)
rl Y - 3 h o (20)
and
cf = ho x/g hot (21)
the wave front velocity becomes
9 x ~ o 2 - dp d= ( d { ) = 9 x / ~ o ( 2 - P ) . (22,
Equation (18) can be written in terms of the new vari- ables as
8P P + T / ~ + 288(2_i0)
1 p3 1 + ~ + g y p = 0. (23)
To obtain an approximate solution for limiting cases where t --+ 0 or t --+ oo, a new transformation is intro-

V. P. Singh et al.
duced by taking a =/~ as the independent variable and as the dependent one. Then
= / ' ( a ) = f ' @ (24)
p = r~ f ' (a) - f (u) (25)
and 1
[5 -f'(a)" (26)
According to Eqs. (24) to (26), Eq. (23) can be written a s
a~2g'+Yf'8 2 + 288 (2a4- u) -f"-29(2-a'(2f'-f)f"
1 3 ,, 1 f , , +~a f +~ya = 0 . (27)
For t = 0, both p and/~ vanish so that
f (0) = f ' (0) = 0 (28)
Equation (27) can be solved by using Taylor series expansion around the point a = 0. The solution will depend upon infiltration and surface friction. Since the value of infiltration I11 at point q is difficult to estimate, the analysis will be limited for the special case where time is very large. For that particular case, Eq. (25) gives
p = 2 [4 - ~ x/~]" (29)
Then from Eqs. (19) and (21), the advance length is estimated as
Having determined the advance length from Eq. (30) and the rate of inflow from Eq. (9), the mean surface depth can be approximated from Eq. (10) as
8 (c, ,,1/2 1 c=27\2 h~176176 --~oiY(t--r) dr.(31)
Equation (31) gives the mean depth of flow of the LM equation in terms of inflow water depth, friction resistance and infiltration.
Another solution to Eq. (18) was provided by Scar- latos and Singh (1987). Upon neglecting infiltration effects (Y1 =0) and dividing by t, Eq. (18) yields
2 2 9x/~o 9ho \ 2 fi 3
- [ ~ lci( 1 2 ~ ) 4 + ~ ( 1 2 ~ o )
9h o t (32)
For t -* oo, Eq. (32) reduces to
1 = 2 x / ~ o + 0 (33)
Setting
F =
the solution of Eq. (33) is given as
4cl ~ o r - l n r = ~ t+C(t) (34)
where C(t) is the interaction constant. Equation (34) is a transcendental equation which implicitly provides the propagation velocity of the advancing water front. Application of Eq. (34) requires calibration using field data of the integration constant C(t).
E x p e r i m e n t a l v e r i f i c a t i o n
Nine sets of data encompassing non-vegetated freely draining and closed borders as well as vegetated closed borders were used for verification of Eqs. (31) and (34). Three sets of data for freely draining borders, Roth-8, Roth-9 and Roth-10, are due to Roth et al. (1974); the three sets of data for non-vegetated closed borders, R-l, R-2 and R-3, as well as three sets of data for vegetated closed borders, R-10, R-11 and R-12, are due to Ram (1969). All the nine sets of data have been reported previously by Singh and Ram (1983). Infor- mation regarding those data sets is given in Table 1. The cumulative infiltration depth is estimated using Kostiakov's equation for any opportunity time r as
Y (z) = b K zb- 1 (35)
where b and K are empirical constants. For these data sets, the surface mean water depth
c of the LM equation in Eq. (10) was calibrated. For computation of modified depth c from Eq. (31), the value of the friction coefficient c I is to be estimated, first. This was done by utilizing the relation
= 9 (36) Cf C2 h
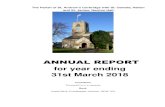
where Ch is Chezy's coefficient of friction. Since c h was available as part of the data, c I was calculated for each data set. Then, the new modified value for mean depth c was computed. The computed and calibrated values of c are plotted in Figs. 2 to 4. These figures show that computed and calibrated values of c are in good agree- ment. The mean depth c is a function of time; only in the case of data set Roth-10 for freely draining border, c was almost constant. Generally, the mean depth c

Improved Lewis-Milne equation
Table 1. Border irrigation experimental data
Source Discharge
q0 (m2/min)
Water depth Infiltration coefficient
h o K b b (m) (m/min b)
Friction coefficient c f (~,/m/s)
Length
L (m)
Time
t (min)
Roth-8 0.1053 0.0153 0.0093 0.4410 29.32 91.46 44.1 Roth-9 0.1448 0.0286 0.0152 0.3360 15.78 91.46 41.0 Roth-10 0.2011 0.0283 0.0244 0.1100 21.23 91.46 28.8
R-I 0.1600 0.0255 0.0039 0.5670 9.26 100.00 22.5 R-2 0.1200 0.0230 0.0045 0.5740 8.11 100.00 37.0 R-3 0.0800 0.0150 0.0046 0.5900 10.26 100.00 59.0
R- 10 0.1600 0.0381 0.0044 0.6200 5.07 100.00 41.0 R-11 0.1200 0.0350 0.0036 0.6300 4.32 100.00 51.0 R- 12 0.0800 0.0300 0.053 0.5330 3.63 100.00 75.0
0 7 0
.060
E
. 050
I.- 13.
040 n-
. 050 Z
W
0 2 0
.010
g
�9 g g
g
D
= 0
0
0
Q
8
0
o Roth 8 �9 " 6 o - 9 �9 " 9 ~. " IO �9 " tO
I I I I I ] I I 10 20 50 40 50 6 0 70 80
A D V A N C E T I M E , M i n u t e s
Fig. 2. Mean depth of the LM equation for data sets Roth-8, Roth-9 and Roth-10. Solid symbols correspond to Eq. (31) and blank symbols correspond to Eq. (10)
. 0 7 0
O 6 0
E
T 050
o a: . 0 4 0 b.I
0 5 0 z
LU
0 2 0
0 1 0
Q
t
8
Q
Q
0
o R - - I �9 " I o 1, 2 �9 " 2
�9 " 5
,~ "o ~'o 4 5'o 6'0 ,'o ~ A D V A N C E T I M E , M i n u t e s
Fig. 3. Mean depth of the LM equation for data sets R-l, R-2 and R-3. Solid symbols correspond to Eq. (31) and blank sym- bols correspond to Eq. (10)
. 070
O 6 0 E
:z: . 050 I.- O.
ne . 040 uJ
~= .050 Z
td
.020
.010
g
o j a
o �9 z=
g
0
0 8 D
8
8
e
o R - IO �9 " I 0 o " I t �9 " I I a, . 12 �9 " i 2
1~3 I [ I I I I 2 0 510 4 0 5 0 6 0 70 80
A D V A N C E T I M E , M i n u t e s
Fig. 4. Mean depth of the LM equation for data sets R-10, R-11 and R-12. Solid symbols correspond to Eq. (31) and blank sym- bols correspond to Eq. (10)
increased in time, and increased with increasing inflow rate and decreasing Chezy's coefficient of friction (i.e., increasing bottom friction). On the contrary, c de- creased with increasing rate of infiltration.
The proposed method has the advantage over the original LE equation in that c can be estimated direct- ly from physical characteristics of the system, such as Chezy's coefficient of friction. At this point it should also be kept in mind that Eq. (31) was derived under certain simplifying assumptions and not by solving Eq. (27) in its full form. The calibration was done by using the available information on advance front and time, and infiltrated water depth.
In general, the mean depth c depends on inflow rate, water depth at the inlet, infiltration characteris- tics and Chezy's coefficient of friction. However, for a quantitative and detailed estimation of the influence of

6
Table 2. Calibrated values of constant A
V. P. Singh et al.
Data set Roth-8 Roth-9 Roth-10 R-I R-2 R-3 R-10 R-11 R-12
A 2.51 3.39 3.04 2.68 3.10 3.34 3.44 3.51 3.91
each individual parameter of the system on the mean depth c, analysis of more da ta is required.
An assessment of the validity of Eq. (34) was made by calibrating the integrat ion coefficient C(t). F r o m experimental data, it was derived that
4c: /9 t+C(t) = A (37) 9 ~/ho
where A is a constant . The value of A for the various data sets is given in Table 2. The value of A is expected to depend on the geometrical and physical characteris- tics of the system. However , f rom the limited data, no correlat ion could be derived. Once the constant A is established, the advance length can be est imated from Eqs. (34) and (37).
Conclusions
The following conclusions can be d rawn from this s tudy:
1. The surface mean water depth in the L M equat ion is not constant and m a y vary in time. This variat ion tends to increase in time during the advance phase.
2. The computed and calibrated values of the mean depth during the advance phase of border irrigation are in good agreement.
3. The mean depth increases with increasing inflow discharge, increasing surface friction, or decreasing infiltration. Fo r quanti tat ive informat ion of these relations, applicat ion of more experimental or field data is required.
4. Numerica l solution of the complete Eq. (27) should yield even better results.
References
Bassett D (1972) A mathematical model of water advance in border irrigation. Trans ASAE 15:992
Katapodes ND, Strelkoff T (1977) Hydrodynamics of border irrigation-complete model. J Irrig Drain Div ASCE 103(IR3): 309
Lewis MR, Milne WE (1938) Analysis of border irrigation. Agr Eng 19:267
Parlange J (1973) Note on the infiltration advance front from border irrigation. Water Resour Res, 9(4):1075
Phillip JR, Farrell DA (1964) General solution of the infiltration- advance problem in irrigation hydraulics. J Geophys Res 69(4):621 631
Ram RS (1969) Hydraulics of recession flow in border irrigation system. (unpublished M.S. Thesis) Indian Institute of Tech- nology, Kharagpur, India
Roth RL, Ronken DW, Fangmeir DD, Atchison AK (1974) Data for border irrigation. Trans ASAE, 8:157
Sakkas JG, Strelkoff TS (1974) Hydrodynamics of surface irriga- tion. J Irrig Drain Div ASCE, 100(IR1):31
Scarlatos PD, Singh VP (1987) Estimation of mean water depth for border irrigation. In: Irrigation systems for the 21st cen- tury. James LG, English MJ (eds) ASCE Specialty Confer- ence, Portland, Oregon
Sherman B, Singh VP (1978) A kinematic model for surface irrigation. Wat Resour Res 14(2):357
Sherman B, Singh VP (1982) A kinematic model for surface irrigation: An extension. Water Resour Res 18(3):659
Singh VP, Prasad SN (1983) Derivation of the mean depth in the Lewis and Milne equation for border irrigation. Proceedings of the Specialty Conference on Advances in Irrigation and Drainage, ASCE, Jackson, Wyoming, pp 242-249
Singh VP, Ram RS (1983) A kinematic model for surface irriga- tion: verification by experimental data. Water Resour Res 19(6): 159
Stoker JJ (1957) Water waves. Interscience, New York Strelkoff T, Katapodes ND (1977) Border irrigation hydraulics
using zero inertia. J Irrig Drain Div ASCE, 103(IR3): 325