An Importance Sampling Approach to Integrate Expert Knowledge When Learning Bayesian Networks From...
46
An Importance sampling approach to integrate expert knowledge when learning Bayesian Networks from data Andrés Cano, Andrés R. Masegosa and Serafín Moral Department of Computer Science and Artificial Intelligence University of Granada (Spain) Dortmund, June 2010 Information Processing and Management of Uncertainty in Knowledge-Based Systems IPMU 2010 Dortmund (Germany) 1/32
Transcript of An Importance Sampling Approach to Integrate Expert Knowledge When Learning Bayesian Networks From...

An Importance sampling approach tointegrate expert knowledge when learning
Bayesian Networks from data
Andrés Cano, Andrés R. Masegosa and Serafín Moral
Department of Computer Science and Artificial Intelligence
University of Granada (Spain)
Dortmund, June 2010
Information Processing and Management of Uncertainty in Knowledge-Based Systems
IPMU 2010 Dortmund (Germany) 1/32

Outline
1 Introduction
2 Learning Bayesian Networks(BN) from data
3 Importance Sampling for learning BN
4 Integration of Expert Knowledge
5 Experimental Evaluation
6 Conclusions & Future Works
IPMU 2010 Dortmund (Germany) 2/32

Introduction
Part I
Introduction
IPMU 2010 Dortmund (Germany) 3/32

Introduction
Bayesian Networks
Bayesian Networks
Excellent models to graphically represent the dependency structure of theunderlying distribution in multivariate domains.
The learning from data of this dependency structure in a multivariate problemdomain represents a very relevant source of knowledge (direct interactions,conditional independencies...)
IPMU 2010 Dortmund (Germany) 4/32

Introduction
Learning Bayesian Networks from Data
Uncertainty in Model Selection
When learning BNs from data there usually are several models with a highscore (high posterior probability given the data).
This situation is specially common in problem domains with high number ofvariables and low sample sizes.
IPMU 2010 Dortmund (Germany) 5/32

Introduction
Integration of Expert Knowledge
Expert Knowledge
In many domain problems expert knowledge is available.
The graphical structure of BNs greatly ease the interaction with a human expert:
Causal ordering.D-separtion criteria.
Previous Works I
There have been many attempts to introduce expert knowledge when learningBNs from data.
Via Prior Distribution [2,5]: Use of specific prior distributions over thepossible graph structures to integrate expert knowledge:
Expert assigns higher prior probabilities to most likely edges.
IPMU 2010 Dortmund (Germany) 6/32

Introduction
Integration of Expert Knowledge
Expert Knowledge
In many domain problems expert knowledge is available.
The graphical structure of BNs greatly ease the interaction with a human expert:
Causal ordering.D-separtion criteria.
Previous Works I
There have been many attempts to introduce expert knowledge when learningBNs from data.
Via Prior Distribution [2,5]: Use of specific prior distributions over thepossible graph structures to integrate expert knowledge:
Expert assigns higher prior probabilities to most likely edges.
IPMU 2010 Dortmund (Germany) 6/32

Introduction
Integration of Expert Knowledge
Previous Works II
Via structural Restrictions [6]: Expert codify his/her knowledge as structuralrestrictions.
Expert defines the existence/absence of arcs and/or edges and causalordering restrictions.Retrieved model should satisfy these restrictions.
Limitations of "Prior" Expert Knowledge
The system would ask to the expert his/her belief about any possible featureof the BN (non feasible in high domains).
The expert could be biased to provide the most “easy” or clear knowledge.
The system does not help to the user to introduce information about the BNstructure.
IPMU 2010 Dortmund (Germany) 7/32

Introduction
Integration of Expert Knowledge
Previous Works II
Via structural Restrictions [6]: Expert codify his/her knowledge as structuralrestrictions.
Expert defines the existence/absence of arcs and/or edges and causalordering restrictions.Retrieved model should satisfy these restrictions.
Limitations of "Prior" Expert Knowledge
The system would ask to the expert his/her belief about any possible featureof the BN (non feasible in high domains).
The expert could be biased to provide the most “easy” or clear knowledge.
The system does not help to the user to introduce information about the BNstructure.
IPMU 2010 Dortmund (Germany) 7/32

Introduction
Interactive Learning of Bayesian Networks
Active Interaction with the Expert
Strategy: Ask to the expert by the presence of the edges that most reduce themodel uncertainty.
Method: Framework to allow an efficient and effective interaction with the expert.
Expert is only asked for this controversial structural features.
IPMU 2010 Dortmund (Germany) 8/32

Introduction
Interactive Learning of Bayesian Networks
Active Interaction with the Expert
Strategy: Ask to the expert by the presence of the edges that most reduce themodel uncertainty.
Method: Framework to allow an efficient and effective interaction with the expert.
Expert is only asked for this controversial structural features.
IPMU 2010 Dortmund (Germany) 8/32

Previous Knowledge
Part II
Learning Bayesian Networks from data
IPMU 2010 Dortmund (Germany) 9/32

Previous Knowledge
Notation
Let be X = (X1, ...,Xn) a set of n random variables. Val(Xi ) is the set of valuesof Xi .
We assume variables are enumerated in a total causal order.We also assume a fully observed data set D.
A Bayesian Network B can be described by:
G the graph structure.θG the parameters.
A graph G can be decomposed as a vector of parent sets:
G = (Pa(X1), ...,Pa(Xn))
We also define Ui as a random variable taking values in the space of all possibleparent sets of Xi , Val(Ui ).
Let be G a random variable taking values in the set Val(G) of all possible graphstructures consistent with the total order.
IPMU 2010 Dortmund (Germany) 10/32

Previous Knowledge
Notation
Let be X = (X1, ...,Xn) a set of n random variables. Val(Xi ) is the set of valuesof Xi .
We assume variables are enumerated in a total causal order.We also assume a fully observed data set D.
A Bayesian Network B can be described by:
G the graph structure.θG the parameters.
A graph G can be decomposed as a vector of parent sets:
G = (Pa(X1), ...,Pa(Xn))
We also define Ui as a random variable taking values in the space of all possibleparent sets of Xi , Val(Ui ).
Let be G a random variable taking values in the set Val(G) of all possible graphstructures consistent with the total order.
IPMU 2010 Dortmund (Germany) 10/32

Previous Knowledge
Notation
Let be X = (X1, ...,Xn) a set of n random variables. Val(Xi ) is the set of valuesof Xi .
We assume variables are enumerated in a total causal order.We also assume a fully observed data set D.
A Bayesian Network B can be described by:
G the graph structure.θG the parameters.
A graph G can be decomposed as a vector of parent sets:
G = (Pa(X1), ...,Pa(Xn))
We also define Ui as a random variable taking values in the space of all possibleparent sets of Xi , Val(Ui ).
Let be G a random variable taking values in the set Val(G) of all possible graphstructures consistent with the total order.
IPMU 2010 Dortmund (Germany) 10/32

Previous Knowledge
The Bayesian Learning Framework
Scoring a graph structure
Marginal Likelihood of a graph structure:
P(G = G|D) = P(G|D) ∝ P(G)P(D|G) =∏
i
score(Xi ,PaG(Xi )|D)
scoreBDeu(Xi ,Ui |D) = Pi (U)
|Ui |∏j=0
Γ(αij )
Γ(αij + Nij )
|Xi |∏k=1
Γ(αijk + Nijk )
Γ(αijk )
Pi (U) is the prior probability that U is the parent set of Xi .
Approximating the posterior P(G|D)
Our approach is supported on the approximation of P(G|D).
It allows to know which graph structures are the most likely (best explain thedata).
Exhaustive enumeration is not feasible because the space of graph structures issuper-exponential.
IPMU 2010 Dortmund (Germany) 11/32

Previous Knowledge
The Bayesian Learning Framework
Scoring a graph structure
Marginal Likelihood of a graph structure:
P(G = G|D) = P(G|D) ∝ P(G)P(D|G) =∏
i
score(Xi ,PaG(Xi )|D)
scoreBDeu(Xi ,Ui |D) = Pi (U)
|Ui |∏j=0
Γ(αij )
Γ(αij + Nij )
|Xi |∏k=1
Γ(αijk + Nijk )
Γ(αijk )
Pi (U) is the prior probability that U is the parent set of Xi .
Approximating the posterior P(G|D)
Our approach is supported on the approximation of P(G|D).
It allows to know which graph structures are the most likely (best explain thedata).
Exhaustive enumeration is not feasible because the space of graph structures issuper-exponential.
IPMU 2010 Dortmund (Germany) 11/32
Previous Knowledge
Approximating the Posterior
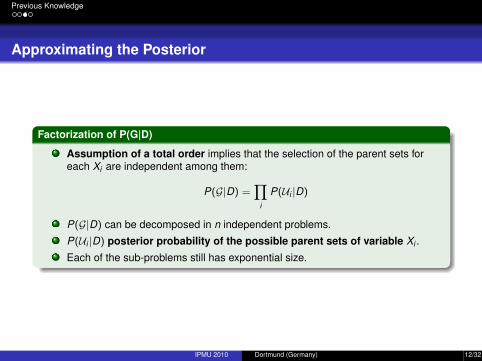
Factorization of P(G|D)
Assumption of a total order implies that the selection of the parent sets foreach Xi are independent among them:
P(G|D) =∏
i
P(Ui |D)
P(G|D) can be decomposed in n independent problems.
P(Ui |D) posterior probability of the possible parent sets of variable Xi .
Each of the sub-problems still has exponential size.
IPMU 2010 Dortmund (Germany) 12/32

Previous Knowledge
Approximating the Posterior P(Ui |D)
Closed Form Solution
In [3] it was proposed a closed form solution assuming a node can have up toK parents.
It would have a polynomial efficiency O(n(K +1)).
Markov Chain Monte Carlo
Lets Val(Ui ) be the space model of the Markov Chain.
If the Markov Chain is in some state U in iteration t , a new model U′ israndomly drawn by adding, deleting of switching any edge.
The Markov Chain moves to state U′ in the iteration t + 1 with probability:
m(Ut ,Ut+1) = min{1,N (U)score(D|U′)N (U′)score(D|U)
}
If it not, the Markov Chain remains in state U.
This Markov Chain has an stationary distribution (t →∞) which is P(U|D).
IPMU 2010 Dortmund (Germany) 13/32

Previous Knowledge
Approximating the Posterior P(Ui |D)
Closed Form Solution
In [3] it was proposed a closed form solution assuming a node can have up toK parents.
It would have a polynomial efficiency O(n(K +1)).
Markov Chain Monte Carlo
Lets Val(Ui ) be the space model of the Markov Chain.
If the Markov Chain is in some state U in iteration t , a new model U′ israndomly drawn by adding, deleting of switching any edge.
The Markov Chain moves to state U′ in the iteration t + 1 with probability:
m(Ut ,Ut+1) = min{1,N (U)score(D|U′)N (U′)score(D|U)
}
If it not, the Markov Chain remains in state U.
This Markov Chain has an stationary distribution (t →∞) which is P(U|D).
IPMU 2010 Dortmund (Germany) 13/32

Importance Sampling
Part III
Importance Sampling
IPMU 2010 Dortmund (Germany) 14/32

Importance Sampling
Importance Sampling
Description
Based on the employment of an auxiliary distribution Q which roughlyapproximate P, the target distribution.
Q is a distribution which is easier to sample for it.
EP(f (x)) =
∫P(x)
Q(x)f (x)Q(x)dx = EQ(w(x)f (x)) (1)
where w(x) = P(x)Q(x)
acts as a weight function.
A set of T samples {x1, ..., xT } are generated form Q and, then, it is computed
w t = P(x t )
Q(x t ).
The estimator µ̂ of EP(f (x)) is finally computed as follows:
µ̂ =
∑Tt=1 w(x t )f (t)∑T
t=1 w(x t )(2)
Key Aspect: P and Q can be known up to a multiplicative constant.
IPMU 2010 Dortmund (Germany) 15/32

Importance Sampling
Importance Sampling
Description
Based on the employment of an auxiliary distribution Q which roughlyapproximate P, the target distribution.
Q is a distribution which is easier to sample for it.
EP(f (x)) =
∫P(x)
Q(x)f (x)Q(x)dx = EQ(w(x)f (x)) (1)
where w(x) = P(x)Q(x)
acts as a weight function.
A set of T samples {x1, ..., xT } are generated form Q and, then, it is computed
w t = P(x t )
Q(x t ).
The estimator µ̂ of EP(f (x)) is finally computed as follows:
µ̂ =
∑Tt=1 w(x t )f (t)∑T
t=1 w(x t )(2)
Key Aspect: P and Q can be known up to a multiplicative constant.
IPMU 2010 Dortmund (Germany) 15/32

Importance Sampling
Importance Sampling for learning BNs
Step 0:
Candidate Parents are considered in arandom permutation.
Score of initial model:
score(X , {∅}|D)
IPMU 2010 Dortmund (Germany) 16/32
Importance Sampling
Importance Sampling for learning BNs
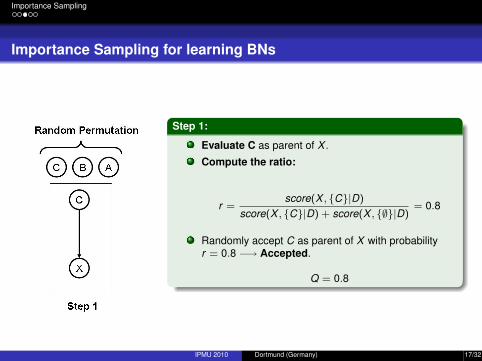
Step 1:
Evaluate C as parent of X .
Compute the ratio:
r =score(X , {C}|D)
score(X , {C}|D) + score(X , {∅}|D)= 0.8
Randomly accept C as parent of X with probabilityr = 0.8 −→ Accepted.
Q = 0.8
IPMU 2010 Dortmund (Germany) 17/32

Importance Sampling
Importance Sampling for learning BNs
Step 2:
Evaluate B as parent of X .
Compute the ratio:
r =score(X , {C,B}|D)
score(X , {C,B}|D) + score(X , {C}|D)= 0.1
Randomly accept B as parent of X with probabilityr = 0.1 −→ Non Accepted.
Q = 0.8 · 0.9
IPMU 2010 Dortmund (Germany) 18/32

Importance Sampling
Importance Sampling for learning BNs
Step 3:
Evaluate A as parent of X .
Compute the ratio:
r =score(X , {C,A}|D)
score(X , {C,A}|D) + score(X , {C}|D)= 0.7
Randomly accept A as parent of X with probabilityr = 0.7 −→ Accepted.
Q = 0.8 · 0.9 · 0.7 = 0.504
Weight of the final model:
W 1 =score(X , {C,A}|D)
0.504
The process is repeated T times.
Using these samples we get an approximation of P(Ui |D).
IPMU 2010 Dortmund (Germany) 19/32

Importance Sampling
Importance Sampling for learning BNs
Step 3:
Evaluate A as parent of X .
Compute the ratio:
r =score(X , {C,A}|D)
score(X , {C,A}|D) + score(X , {C}|D)= 0.7
Randomly accept A as parent of X with probabilityr = 0.7 −→ Accepted.
Q = 0.8 · 0.9 · 0.7 = 0.504
Weight of the final model:
W 1 =score(X , {C,A}|D)
0.504
The process is repeated T times.
Using these samples we get an approximation of P(Ui |D).
IPMU 2010 Dortmund (Germany) 19/32

Integrating Expert Knowledge
Part IV
Integrating Expert Knowledge
IPMU 2010 Dortmund (Germany) 20/32

Integrating Expert Knowledge
Methodology Description
IPMU 2010 Dortmund (Germany) 21/32

Integrating Expert Knowledge
Prior Knowledge
Representing absence of prior knowledge
“Uniform prior over structures is usually chosen by convenience” [3].
P(G) does not grow with the data, but it matters at low sample sizes.
Let us assume that the prior probability of an edge is p and independent ofeach other. If Xi has k parents out of m nodes:
P(Pa(Xi )) = pk (1− p)(m−k)
If the number of candidate parents m grows, p should be decreased tocontrol de number of false positives edges: “multiplicity correction”.
This is solved by assuming that p has a Beta prior with parameter α = 0.5 [11]:
Pi (Pa(Xi )) =Γ(2 ∗ α)
Γ(m + 2α)
Γ(k + α)Γ(m − k + α)
Γ(α)Γ(α)
IPMU 2010 Dortmund (Germany) 22/32

Integrating Expert Knowledge
Prior Knowledge
Representing absence of prior knowledge
“Uniform prior over structures is usually chosen by convenience” [3].
P(G) does not grow with the data, but it matters at low sample sizes.
Let us assume that the prior probability of an edge is p and independent ofeach other. If Xi has k parents out of m nodes:
P(Pa(Xi )) = pk (1− p)(m−k)
If the number of candidate parents m grows, p should be decreased tocontrol de number of false positives edges: “multiplicity correction”.
This is solved by assuming that p has a Beta prior with parameter α = 0.5 [11]:
Pi (Pa(Xi )) =Γ(2 ∗ α)
Γ(m + 2α)
Γ(k + α)Γ(m − k + α)
Γ(α)Γ(α)
IPMU 2010 Dortmund (Germany) 22/32

Integrating Expert Knowledge
Prior Knowledge
Representing absence of prior knowledge
“Uniform prior over structures is usually chosen by convenience” [3].
P(G) does not grow with the data, but it matters at low sample sizes.
Let us assume that the prior probability of an edge is p and independent ofeach other. If Xi has k parents out of m nodes:
P(Pa(Xi )) = pk (1− p)(m−k)
If the number of candidate parents m grows, p should be decreased tocontrol de number of false positives edges: “multiplicity correction”.
This is solved by assuming that p has a Beta prior with parameter α = 0.5 [11]:
Pi (Pa(Xi )) =Γ(2 ∗ α)
Γ(m + 2α)
Γ(k + α)Γ(m − k + α)
Γ(α)Γ(α)
IPMU 2010 Dortmund (Germany) 22/32

Integrating Expert Knowledge
Interacting with the Expert
P(S → X |D) = 0.85 P(R → X |D) = 0.8 P(C→ X|D) = 0.45
Description
Key Idea: As lower the entropy of P(Ui |D) is, more reliable learning we have.
Expert Interaction is carried out in order to reduce the entropy H(P(Ui |D)).
System ask to the expert by those edges with higher entropy
.
IPMU 2010 Dortmund (Germany) 23/32

Integrating Expert Knowledge
Interacting with the Expert
P(S → X |D) = 0.85 P(R → X |D) = 0.8 P(C→ X|D) = 0.45
Description
Key Idea: As lower the entropy of P(Ui |D) is, more reliable learning we have.
Expert Interaction is carried out in order to reduce the entropy H(P(Ui |D)).
System ask to the expert by those edges with higher entropy.
IPMU 2010 Dortmund (Germany) 23/32

Integrating Expert Knowledge
Interacting with the Expert
P(S → X |D) = 0.88 P(R → X |D) = 0.77 P(C→ X|D) = 1.0
Description
The entropy of P(Ui |D) is reduced. Probability mass concentrates aroundone model.This methodology can be iteratively applied asking by the presence/absenceof more edges.
Stopping the interaction when the probability of MAP model is L times higherthe second most probable model.
IPMU 2010 Dortmund (Germany) 24/32

Experimental Evaluation
Part V
Experimental Evaluation
IPMU 2010 Dortmund (Germany) 25/32

Experimental Evaluation
Experimental Set-up
Bayesian Networks:
alarm (37 nodes), boblo (23 nodes), boerlage-92 (23 nodes), hailfinder (56nodes), insurance (27 nodes).
Sample Sizes:
We run 10 times the algorithms with different samples sizes: 50, 100, 500and 1000.
Evaluation Measures
Number of missing/extra links, Kullback-Leibler distance...We report average values across the five networks.
Expert Interaction is simulated:
Access to the true BN model when asking bypresence/absence of an edge.
IPMU 2010 Dortmund (Germany) 26/32

Experimental Evaluation
Experimental Set-up
Bayesian Networks:
alarm (37 nodes), boblo (23 nodes), boerlage-92 (23 nodes), hailfinder (56nodes), insurance (27 nodes).
Sample Sizes:
We run 10 times the algorithms with different samples sizes: 50, 100, 500and 1000.
Evaluation Measures
Number of missing/extra links, Kullback-Leibler distance...We report average values across the five networks.
Expert Interaction is simulated:
Access to the true BN model when asking bypresence/absence of an edge.
IPMU 2010 Dortmund (Germany) 26/32

Experimental Evaluation
Structure Prior Evaluation
N. of Structural Errors KL Distance
Analysis
Beta-Prior reduces the number of structural errors for both IS and MCMCM.
IS has a low number of errors than MCMC specially with low sample sizes.
Beta-Prior also reduces KL distance for both IS and MCMC.
IPMU 2010 Dortmund (Germany) 27/32
Experimental Evaluation
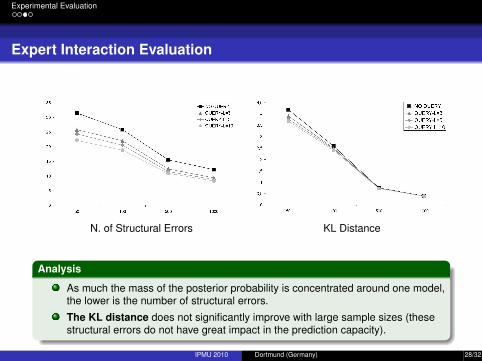
Expert Interaction Evaluation
N. of Structural Errors KL Distance
Analysis
As much the mass of the posterior probability is concentrated around one model,the lower is the number of structural errors.
The KL distance does not significantly improve with large sample sizes (thesestructural errors do not have great impact in the prediction capacity).
IPMU 2010 Dortmund (Germany) 28/32

Experimental Evaluation
Expert Interaction Evaluation
N. of Interactions Interaction Accuracy
Analysis
The number of Interactions are feasible for a human expert.
Prior Exhaustive Querying: 600 questions in averaged.
The Interaction Accuracy: ratio between number of reduced structuralerrors and number of interactions.
Average Accuracy of random interactions: 1%.
IPMU 2010 Dortmund (Germany) 29/32

Conclusions
Part VI
Conclusions & Future Works
IPMU 2010 Dortmund (Germany) 30/32

Conclusions
Conclusions & Future Works
Conclusions
A new methodology to introduce expert knowledge whenlearning BN from data.
A new Importance sampling technique for sampling BN.
System requests to the expert a feasible number of questions.
Interaction improves the quality of the inferred BN models.
Future Works
Extend these methods to the learning of BN models withoutcausal ordering assumptions.
IPMU 2010 Dortmund (Germany) 31/32

Conclusions
Conclusions & Future Works
Conclusions
A new methodology to introduce expert knowledge whenlearning BN from data.
A new Importance sampling technique for sampling BN.
System requests to the expert a feasible number of questions.
Interaction improves the quality of the inferred BN models.
Future Works
Extend these methods to the learning of BN models withoutcausal ordering assumptions.
IPMU 2010 Dortmund (Germany) 31/32

Thanks for your attention!!
Questions?
IPMU 2010 Dortmund (Germany) 32/32