An Experimental L1/L2 GNSS Receiver for High Precision ... · Para lograr un buen desempeño del...
6
Abstract— In this work we present the design and implementation of a GNSS receiver that can work with the civil signals of the L1 and L2 bands of GPS and GLONASS, and the E1 Open Service signal of Galileo. The developed prototype has two RF front-ends, one for the L1 band and another for the L2 band. The signals from each band are amplified and then down- converted to an intermediate frequency. The two local oscillator tones used for the mixing, and the clock signals for the next digitalization and processing stages are generated by a frequency synthesizer board, from a common reference. The digitalization and posterior processing of the signals can be carried out using generic devices, like an acquisition board and an FPGA, according to the Software Defined Radio (SDR) concept. In this way a programmable receiver is obtained. These kind of receivers are versatile since they can be used for testing acquisition, tracking, and navigation algorithms for research and develop purposes. Commercial receivers do not have that capability, because their digital processing stages cannot be modified by the user. Moreover, a multi-band and multi- constellation receiver allows to greatly increase the performance in relation to mass market GNSS receivers which relay on only one navigation system and one carrier frequency. Measurements realized to the implemented prototype that validate the proposed design are presented. Keywords— GNSS receiver, multi-band, multi-constellation, SDR, RF. 1 I. INTRODUCCIÓN OS SISTEMAS satelitales de navegación global (GNSS) son constelaciones de satélites que transmiten señales a partir de las cuales es posible determinar la posición de un receptor ubicado en cualquier parte del mundo. Debido a que permiten obtener una alta precisión en la determinación de la posición, en los últimos años las aplicaciones de los GNSS han crecido notablemente, reemplazando progresivamente a los métodos de posicionamiento convencionales. El sistema de navegación más conocido es el Sistema de Posicionamiento Global (GPS), que fue desarrollado por EE.UU. y se encuentra operativo desde 1994. Sin embargo existen otros GNSS, como el sistema ruso GLONASS, el cual This work was supported by the following institutions: Universidad Nacional de La Plata (UNLP), Comisión de Investigaciones Científicas de la Provincia de Buenos Aires (CICPBA) y Agencia Nacional de Promoción Científica y Tecnológica (ANPCyT). G. R. L. La Valle, Universidad Nacional de La Plata, [email protected] J. G. García, Universidad Nacional de La Plata, [email protected] P. A. Roncagliolo, Universidad Nacional de La Plata, [email protected] C. H. Muravchik, Universidad Nacional de La Plata, [email protected] recientemente fue declarado completamente operativo, y el sistema europeo Galileo, actualmente en proceso de desarrollo. Figura 1. Distribución de frecuencias GNSS. Los GNSS utilizan señales de espectro expandido de secuencia directa. Los satélites de GPS transmiten en tres frecuencias de portadora denominadas L1, L2 y L5. Los satélites de Galileo también transmiten tres portadoras conocidas como E1, E6 y E5. Tanto en GPS como en Galileo todos los satélites comparten las mismas bandas de frecuencia haciendo uso de la técnica de acceso múltiple por división de código (CDMA). Por otra parte, los satélites de GLONASS utilizan acceso múltiple por división de frecuencia (FDMA) y transmiten en dos bandas llamadas L1 y L2. La Fig. 1 es un esquema del espectro de las señales de los GNSS, allí es posible observar los anchos de banda y las frecuencias de portadora. Una descripción más detallada de todas las señales puede encontrarse en [1]. Para obtener la solución de posición un receptor de GNSS debe recibir señales de al menos cuatro satélites. Disponer de un receptor capaz de operar con distintos GNSS aumenta considerablemente el número de satélites visibles, lo cual asegura la continuidad en la solución de posición, incluso bajo condiciones de funcionamiento adversas. Por otra parte, con dos frecuencias de portadora es posible medir el retardo ionosférico, que constituye una de las principales fuentes de error en la determinación de la posición. De esta forma se logra una importante mejora en la precisión de la solución de posición frente a los usuarios que utilizan una única portadora, ya que estos últimos deben estimar el retardo ionosférico usando modelos cuyos parámetros se transmiten en el mensaje de navegación [2]. El uso de receptores multibanda es habitual en aplicaciones de posicionamiento diferencial de alta precisión, donde es posible alcanzar errores del orden del centímetro [3]. Actualmente la mayor parte de los receptores de GNSS comerciales están preparados para recibir sólo la banda L1 de GPS, sin embargo en los próximos años, con la G. R. L. La Valle, Student Member, IEEE, J. G. García, Member, IEEE, P. A. Roncagliolo, Member, IEEE, and C. H. Muravchik, Senior Member, IEEE An Experimental L1/L2 GNSS Receiver for High Precision Applications L 48 IEEE LATIN AMERICA TRANSACTIONS, VOL. 11, NO. 1, FEB. 2013
Transcript of An Experimental L1/L2 GNSS Receiver for High Precision ... · Para lograr un buen desempeño del...

Abstract— In this work we present the design and implementation of a GNSS receiver that can work with the civil signals of the L1 and L2 bands of GPS and GLONASS, and the E1 Open Service signal of Galileo. The developed prototype has two RF front-ends, one for the L1 band and another for the L2 band. The signals from each band are amplified and then down-converted to an intermediate frequency. The two local oscillator tones used for the mixing, and the clock signals for the next digitalization and processing stages are generated by a frequency synthesizer board, from a common reference. The digitalization and posterior processing of the signals can be carried out using generic devices, like an acquisition board and an FPGA, according to the Software Defined Radio (SDR) concept. In this way a programmable receiver is obtained. These kind of receivers are versatile since they can be used for testing acquisition, tracking, and navigation algorithms for research and develop purposes. Commercial receivers do not have that capability, because their digital processing stages cannot be modified by the user. Moreover, a multi-band and multi-constellation receiver allows to greatly increase the performance in relation to mass market GNSS receivers which relay on only one navigation system and one carrier frequency. Measurements realized to the implemented prototype that validate the proposed design are presented.
Keywords— GNSS receiver, multi-band, multi-constellation, SDR, RF. 1
I. INTRODUCCIÓN OS SISTEMAS satelitales de navegación global (GNSS) son constelaciones de satélites que transmiten señales a
partir de las cuales es posible determinar la posición de un receptor ubicado en cualquier parte del mundo. Debido a que permiten obtener una alta precisión en la determinación de la posición, en los últimos años las aplicaciones de los GNSS han crecido notablemente, reemplazando progresivamente a los métodos de posicionamiento convencionales.
El sistema de navegación más conocido es el Sistema de Posicionamiento Global (GPS), que fue desarrollado por EE.UU. y se encuentra operativo desde 1994. Sin embargo existen otros GNSS, como el sistema ruso GLONASS, el cual
This work was supported by the following institutions: Universidad Nacional de La Plata (UNLP), Comisión de Investigaciones Científicas de la Provincia de Buenos Aires (CICPBA) y Agencia Nacional de Promoción Científica y Tecnológica (ANPCyT).
G. R. L. La Valle, Universidad Nacional de La Plata, [email protected]
J. G. García, Universidad Nacional de La Plata, [email protected]
P. A. Roncagliolo, Universidad Nacional de La Plata, [email protected]
C. H. Muravchik, Universidad Nacional de La Plata, [email protected]
recientemente fue declarado completamente operativo, y el sistema europeo Galileo, actualmente en proceso de desarrollo.
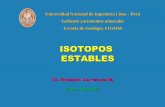
Figura 1. Distribución de frecuencias GNSS.
Los GNSS utilizan señales de espectro expandido de secuencia directa. Los satélites de GPS transmiten en tres frecuencias de portadora denominadas L1, L2 y L5. Los satélites de Galileo también transmiten tres portadoras conocidas como E1, E6 y E5. Tanto en GPS como en Galileo todos los satélites comparten las mismas bandas de frecuencia haciendo uso de la técnica de acceso múltiple por división de código (CDMA). Por otra parte, los satélites de GLONASS utilizan acceso múltiple por división de frecuencia (FDMA) y transmiten en dos bandas llamadas L1 y L2. La Fig. 1 es un esquema del espectro de las señales de los GNSS, allí es posible observar los anchos de banda y las frecuencias de portadora. Una descripción más detallada de todas las señales puede encontrarse en [1].
Para obtener la solución de posición un receptor de GNSS debe recibir señales de al menos cuatro satélites. Disponer de un receptor capaz de operar con distintos GNSS aumenta considerablemente el número de satélites visibles, lo cual asegura la continuidad en la solución de posición, incluso bajo condiciones de funcionamiento adversas. Por otra parte, con dos frecuencias de portadora es posible medir el retardo ionosférico, que constituye una de las principales fuentes de error en la determinación de la posición. De esta forma se logra una importante mejora en la precisión de la solución de posición frente a los usuarios que utilizan una única portadora, ya que estos últimos deben estimar el retardo ionosférico usando modelos cuyos parámetros se transmiten en el mensaje de navegación [2]. El uso de receptores multibanda es habitual en aplicaciones de posicionamiento diferencial de alta precisión, donde es posible alcanzar errores del orden del centímetro [3]. Actualmente la mayor parte de los receptores de GNSS comerciales están preparados para recibir sólo la banda L1 de GPS, sin embargo en los próximos años, con la
G. R. L. La Valle, Student Member, IEEE, J. G. García, Member, IEEE, P. A. Roncagliolo, Member, IEEE, and C. H. Muravchik, Senior Member, IEEE
An Experimental L1/L2 GNSS Receiver for High Precision Applications
L
48 IEEE LATIN AMERICA TRANSACTIONS, VOL. 11, NO. 1, FEB. 2013

Figura 2. Diagrama de bloques del receptor.
disponibilidad de los nuevos sistemas, es esperable que evolucionen para poder manejar una mayor variedad de señales y así mejorar las prestaciones.
Teniendo en cuenta lo expuesto anteriormente, un receptor multiconstelación y multibanda, es decir capaz de recibir las señales de diversos GNSS y de más de una frecuencia de portadora, tiene importantes ventajas en relación a los receptores comerciales típicos que operan con un único sistema de navegación y con una frecuencia de portadora. Por ello, en este trabajo se presenta el diseño y la implementación de un receptor experimental capaz de recibir las señales civiles de las bandas L1 y L2 de GPS y GLONASS, así como la señal E1 de Galileo. Por lo tanto, el rango de frecuencias de interés comprende las bandas L1/E1 de GPS/Galileo (1573MHz a 1577MHz) y L1 de GLONASS (1598MHz a 1606MHz), junto con las bandas L2C de GPS (1226MHz a 1229MHz) y L2 de GLONASS (1242MHz a 1248MHz).
El prototipo desarrollado se encarga de amplificar, seleccionar y convertir a una frecuencia intermedia (FI) menor las señales recibidas por la antena. La digitalización y el procesamiento digital de las señales pueden realizarse en forma externa con dispositivos genéricos, como una placa adquisidora y un dispositivo lógico programable o FPGA. Utilizando esta arquitectura se consigue obtener un receptor reprogramable, acorde al concepto SDR (Radio Definida por Software) [4]. Este tipo de receptores resultan muy versátiles debido a que pueden emplearse como plataforma de prueba de algoritmos de adquisición, seguimiento y navegación con fines de investigación y desarrollo, lo cual no es posible en receptores comerciales en los que las estrategias de procesamiento digital son fijas y no pueden ser modificadas por el usuario.
El trabajo está organizado de la siguiente manera. En la Sección II se presenta la arquitectura elegida para el receptor y se describe el diseño de los diferentes bloques que lo componen. La Sección III resume los resultados de las mediciones realizadas al prototipo implementado, mediante las cuales se validó el diseño propuesto. Finalmente, en la Sección IV se exponen las conclusiones obtenidas.
II. DISEÑO PROPUESTO El rango de frecuencias de interés se concentra en dos
bandas bien definidas y relativamente distantes entre sí, ya que están separadas por aproximadamente 300MHz. Entonces, con el objetivo de simplificar el diseño de la etapa de RF, se decidió implementar el receptor con dos cabezales de radiofrecuencia: uno para la banda L1 y otro para la banda L2. Cada cabezal acondiciona las señales recibidas por su antena y las convierte a frecuencia intermedia a través de la mezcla con un tono de oscilador local (OL). Los dos tonos de oscilador local necesarios, así como los relojes para las etapas de digitalización y procesamiento posteriores son generados por una placa sintetizadora de frecuencias, a partir de una referencia común. La configuración de la placa sintetizadora se realiza en forma automática mediante una CPLD (Complex Programmable Logic Device). En la Fig. 2 se muestra el diagrama de bloques del receptor completo.
A. Cabezales de RF El esquema propuesto, conocido como receptor heterodino,
consiste en una etapa de RF con un amplificador de bajo ruido (LNA) y un filtro que selecciona las bandas de interés. Luego, las señales de RF se convierten a frecuencia intermedia, donde se aporta el resto de la ganancia requerida y se separan las bandas de GPS y GLONASS. Gracias a la separación de las bandas se logra reducir el ancho de banda de las señales. Esto permite disminuir las tasas de muestreo y, en consecuencia, simplificar las etapas de digitalización y procesamiento posteriores desde el punto de vista del consumo y la cantidad de datos que deben ser almacenados y procesados [5]. La Fig. 3 es un diagrama de bloques del cabezal de RF.
Debido a que las señales recibidas son débiles, ya que provienen de satélites que se encuentran a gran distancia de la tierra, se enfatizó en el diseño de los LNA para aumentar la sensibilidad del receptor. Los LNA implementados para cada uno de los cabezales poseen una figura de ruido de 1.1dB.
Ambos cabezales de RF utilizan el mismo circuito impreso y comparten la mayor parte de los componentes, excepto las redes de adaptación del LNA, el filtro de RF y algunos elementos del duplexor que separa las bandas de GPS y GLONASS en frecuencia intermedia. Una descripción más detallada del cabezal de RF está disponible en [5].
B. Sintetizador de frecuencias El sintetizador de frecuencias se encarga de generar los
tonos de oscilador local necesarios para realizar la conversión de las señales de RF a FI en los cabezales de radiofrecuencia. Además, provee los relojes para las etapas de digitalización y procesamiento. La frecuencia de los tonos de OL depende del plan de frecuencias elegido, mientras que el reloj para la etapa
Figura 3. Diagrama de bloques del cabezal de RF.
LÓPEZ LA VALLE et al.: AN EXPERIMENTAL L1/L2 49

Figura 4. Diagrama de bloques del sintetizador de frecuencias.
de digitalización está relacionado con el ancho de banda de las señales de interés.
Elegir una FI alta si bien es deseable porque implica una frecuencia imagen alejada de la banda de interés, requiere la utilización de conversores analógico a digital (ADC) de ancho de banda elevado, los cuales son costosos. Considerando la atenuación que puede lograrse con filtros de RF comerciales y el ancho de banda de los ADC típicos para este tipo de aplicaciones, utilizar una FI de aproximadamente 45MHz es una opción razonable porque permite obtener atenuaciones de frecuencia imagen superiores a 30dB. Entonces, teniendo en cuenta las bandas de frecuencias de interés, se eligieron tonos de OL de 1545MHz y 1195MHz para L1 y L2 respectivamente. Con esta elección las FI resultan 44.5MHz para L1 y 42MHz para L2. En cuanto a la tasa de muestreo, considerando el ancho de banda de las señales, si se utiliza la técnica de muestreo pasabanda, una frecuencia de 20MHz es suficiente para cumplir con el teorema del muestreo en todos los casos.
Para lograr un buen desempeño del receptor, tanto los tonos de OL como el reloj de muestreo deber ser estables en frecuencia y derivados de una referencia común. Esto es fundamental, ya que en un receptor GNSS es necesario que las distintas señales recibidas se procesen de manera coherente. Una forma de generar una señal de frecuencia elevada y precisa, a partir de una referencia de frecuencia menor, es utilizando un lazo de enganche de fase (PLL). Entonces, empleando varios de estos dispositivos es posible derivar todas las frecuencias que se requiera sintetizar a partir de una única referencia común.
En el diseño propuesto se utilizan tres PLLs programables, dos para generar los tonos de OL y otro para generar el reloj de muestreo [6]-[8]. Estos PLLs emplean una referencia de frecuencia común de alta precisión de 10MHz. El usuario puede elegir entre una referencia interna o externa. La referencia interna es un oscilador a cristal compensado en temperatura (TCXO) con una estabilidad 2.5ppm [9], mientras que como referencia externa se utilizó un oscilador a cristal con horno (OCXO) cuya estabilidad es de 10ppb [10]. Esta última opción mejora el desempeño del receptor, pero aumenta sensiblemente su consumo. La referencia se distribuye a los tres PLLs a través de un circuito de distribución adecuado para no degradar la calidad de la señales generadas por los PLLs.
Figura 5. Espectro en la salida de FI de GPS/Galileo L1/E1.
Figura 6. Espectro en la salida de FI de GLONASS L1.
Este circuito está constituido básicamente por un buffer que, a partir de la referencia, genera las tres señales necesarias con los niveles de tensión adecuados. Luego, para llevar estas señales a cada uno de los PLLs se emplea una red de distribución con líneas de largo ecualizado, con el objetivo de evitar desfasajes. La Fig. 4 es un diagrama de bloques del sintetizador de frecuencias.
Los PLLs cuentan con el VCO integrado, lo cual simplifica el circuito. Estos dispositivos son programables, pudiéndose configurar tanto su frecuencia como su nivel de potencia. Esta característica da mayor versatilidad al diseño, ya que permite que el usuario modifique el plan de frecuencias en caso de que sea necesario. La programación se realiza por medio de una CPLD.
C. CPLD Se utiliza para configurar los registros internos de los PLLs
de la placa sintetizadora de frecuencias. Para este tipo de aplicaciones, estos dispositivos lógicos resultan adecuados porque disponen de una memoria interna que les permite entrar en funcionamiento inmediatamente después de ser alimentados, si fueron previamente programados.
En este caso se decidió emplear una CPLD de 128 macroceldas, a la cual se le carga el programa que configura los registros de los PLLs de acuerdo al plan de frecuencias expuesto anteriormente. Dicha CPLD posee un conector de programación que utiliza una interfaz tipo JTAG, por lo que puede ser reconfigurada en caso de que sea necesario modificar el plan de frecuencias establecido. También puede ser utilizada por el usuario para realizar otras tareas, pues tiene líneas de entrada/salida disponibles.
50 IEEE LATIN AMERICA TRANSACTIONS, VOL. 11, NO. 1, FEB. 2013

Figura 7. Espectro en la salida de FI de GPS L2.
Figura 8. Espectro en la salida de FI de GLONASS L2.
III. RESULTADOS Las placas de RF, es decir los dos cabezales y el
sintetizador de frecuencias, se implementaron empleando un sustrato de material RO4350 de cuatro capas. Este material es apto para circuitos de RF ya que posee una constante dieléctrica definida y estable. Además tiene la ventaja de que puede ser laminado en múltiples capas con procedimientos estándar. El resto de las placas, CPLD y OCXO, se implementaron en FR4 debido que éstas operan a frecuencias más bajas.
Para caracterizar los cabezales de RF se midieron los espectros en todas las salidas de FI colocando tonos de la frecuencia central de las bandas L1 y L2 de GPS y GLONASS en ambas entradas de antena. La frecuencia de los tonos empleados para L1 fue 1575MHz y 1602MHz, mientras que para L2 fue de 1227MHz y 1245MHz. La potencia estos tonos se fijó en −95dBm. Ambos cabezales se configuraron con una ganancia de aproximadamente 85dB. Este valor es cercano al requerido en condiciones de operación normales, cuando se utiliza una antena activa. Las Figs. 5, 6, 7 y 8 muestran los espectros medidos. En estas figuras se aprecia la selectividad en las salidas de FI y la presencia del tono de prueba en la frecuencia intermedia correcta, con la ganancia adecuada. Cabe destacar que no se visualizan frecuencias espurias o interferencias en todo el rango de frecuencias de interés.
Adicionalmente se verificó que el rechazo a las frecuencias imagen es mayor a 30dB en todos los casos, y que la figura de ruido total se mantiene en 1.6dB. Estos valores, resumidos en la Tabla I, son muy satisfactorios, siendo incluso mejores a los que se pueden encontrar en receptores comerciales.
TABLA I MEDICIONES DE LOS CABEZALES DE RF
Medición GPS L1 GLO L1 GPS L2 GLO L2 Rechazo de
imagen 37.0dB 42.0dB 40.5dB 39.5dB
Figura de ruido 1.6dB 1.6dB 1.6dB 1.6dB
En cuanto a la placa del sintetizador de frecuencias se
midió el ruido de fase en las salidas de oscilador local de L1 y L2 utilizando un analizador de espectro. Las Figs. 9 y 10 muestran los resultados obtenidos en función del desplazamiento respecto a la frecuencia de portadora. En la Tabla II se indican algunos valores de ruido de fase medidos. Estos valores son adecuados para las aplicaciones de interés de este trabajo, ya que aseguraran una mínima degradación en los niveles de señal a ruido de correlación, aun con tiempos de integración largos [11].
Para caracterizar las salidas de reloj de muestreo se obtuvo su forma de onda con un osciloscopio y se midieron sus parámetros más relevantes. La Fig. 11 muestra la forma de onda de ambas señales. La Tabla III resume los resultados de las mediciones efectuadas. Es importante notar que para este diseño se utilizó una frecuencia de reloj de 40MHz, ya que en el futuro se pretende asociar al receptor una placa digitalizadora con dos conversores AD de dos canales, los cuales requieren una frecuencia del doble de la tasa de muestreo. Analizando los resultados obtenidos se puede concluir que la generación de reloj es correcta, debido a que las señales poseen la frecuencia y los niveles de tensión adecuados (CMOS). Por otra parte, el sobrepico y los tiempos de subida y de bajada están dentro de los valores esperados. La diferencia de fase entre las dos señales de reloj es de sólo 2.6º.
Figura 9. Ruido de fase del oscilador local de L1.
Figura 10. Ruido de fase del oscilador local de L2.
LÓPEZ LA VALLE et al.: AN EXPERIMENTAL L1/L2 51

TABLA II MEDICIONES DE RUIDO DE FASE
Desplazamiento de frecuencia OL L1 OL L2
1kHz −78dBc/Hz −80dBc/Hz 10kHz −82dBc/Hz −81dBc/Hz
100kHz −90dBc/Hz −86dBc/Hz 1MHz −115dBc/Hz −114dBc/Hz
Una vez que todas las placas que componen el receptor
presentado fueron totalmente caracterizadas y se verificó su correcto funcionamiento, se ensambló el receptor completo y se le efectuaron pruebas funcionales para evaluar su funcionamiento en conjunto. La Fig. 12 es una foto del prototipo implementado. Para reducir su superficie, los cabezales de RF se dispusieron uno encima del otro, ya que sus circuitos impresos son idénticos.
Las pruebas funcionales consistieron en realizar la adquisición de las señales de interés. La adquisición es un procedimiento mediante el cual es posible detectar la presencia de un satélite GNSS dado [2]. Para llevar a cabo estas pruebas se conectaron antenas para las bandas L1 y L2 a los cabezales de RF correspondientes. Las señales de FI se digitalizaron simultáneamente con una placa adquisidora a 20Msps [12]. Los datos obtenidos se procesaron con MATLAB utilizando rutinas de adquisición específicas [13]. Las Figs. 13 y 14 pertenecen a los picos de correlación del satélite 29 de GPS, para las señales de código C/A de L1 y L2C respectivamente. En estas imágenes se puede observar que el retardo de código coincide, ya que se trata de señales provenientes de un mismo satélite y adquiridas en forma simultánea. Además se verifica que la relación entre las desviaciones Doppler en L1 y L2 es la misma que entre las respectivas frecuencias de portadora. La Fig. 15 es el pico de correlación del satélite de GLONASS que transmite en la frecuencia 1603.6875MHz.
Figura 11. Forma de onda de los relojes de muestreo y procesamiento.
TABLA III MEDICIONES DE LAS SEÑALES DE RELOJ
Medición CLK1 CLK2 Amplitud 3.2V 3.4V
Frecuencia 40MHz 40MHz Tiempo de subida 750ps 900ps Tiempo de bajada 2.9ns 3.1ns
Sobrepico 12% 6% Ciclo de trabajo 50% 50%
Figura 12. Receptor completamente ensamblado.
Es importante destacar que se logró adquirir todos los satélites visibles al momento de realizar la prueba, lo cual demuestra el correcto funcionamiento del receptor completo.
Si bien existen cabezales de RF comerciales implementados totalmente en circuitos integrados, estos sólo operan en la banda L1. A modo ilustrativo en la Tabla IV se comparan las características de algunos de los integrados comerciales más conocidos con el receptor presentado en este trabajo. En particular se trata del SE4110L [14] de Skyworks, el STA5620 [15] de ST Microelectronics, el NJ1006A [16] de Nemerix, el MAX2742 [17] y el MAX2769 [18] ambos de Maxim. Como puede observarse en la Tabla IV, el receptor desarrollado en este trabajo posee mejores características que la mayoría de los circuitos integrados actualmente disponibles en el mercado. Además incorpora la capacidad de operar en la banda L2.
IV. CONCLUSIONES Se presentó el diseño y la implementación de un receptor
GNSS experimental apto para recibir las señales civiles de las bandas L1 y L2 de GPS y GLONASS, y la señal E1 de Galileo. El prototipo implementado fue validado mediante mediciones y pruebas funcionales, cuyos resultados fueron muy satisfactorios.
Figura 13. Pico de correlación de código C/A L1 (satélite 29).
Figura 14. Pico de correlación de señal L2C (satélite 29).
52 IEEE LATIN AMERICA TRANSACTIONS, VOL. 11, NO. 1, FEB. 2013

Figura 15. Pico de correlación de GLONASS L1.
TABLA IV COMPARACIÓN CON INTEGRADOS COMERCIALES
Código de parte NF total Ruido de fase Rechazo de
imagen Este trabajo 1.6dB −82dBc/Hz @ 10kHz 37dB SE4110L 2.3dB −88dBc/Hz @ 10kHz 30dB STA5620 4.5dB −65dBc/Hz @ 1kHz 20dB NJ1006A 1.8dB −75dBc/Hz @ 100kHz N/A MAX2742 4.5dB −71dBc/Hz @ 10kHz 18dB MAX2769 1.4 a 2.7dB N/A 25dB
El diseño propuesto, basado en el concepto SDR, en
conjunto con una plataforma de procesamiento digital permite obtener un receptor altamente programable. Esta característica resulta de gran utilidad en receptores experimentales, que pueden utilizarse para la prueba de algoritmos de adquisición, seguimiento y navegación, tanto con fines de investigación como de desarrollo de aplicaciones específicas. La baja figura de ruido lograda, junto con la capacidad para recibir señales de las bandas L1 y L2 de GPS y GLONASS, hacen que este receptor sea apto para aplicaciones de alta precisión.
En el futuro se prevé implementar todo el diseño presentado en este trabajo en una única placa. De esta forma se logrará reducir el tamaño del prototipo facilitando su utilización en otros ámbitos.
REFERENCIAS [1] Sherman Lo et. al., “GNSS album, images and spectral signatures of the
new GNSS signals”, Inside GNSS, pp. 46-56, Jun. 2006. [2] E. D. Kaplan, Understanding GPS: Principles and Applications. Boston,
USA: Artech House, 1996. [3] B. W. Parkinson and J. J. Spilker, Global Positioning System: Theory
and Applications, vol. 2. Washington, USA: Progress in Astronautics and Aeronautics, 1995.
[4] P. B. Kenington, RF and Baseband Techniques for Software Defined Radio. Norwood, USA: Artech House, 2005.
[5] R. López La Valle, J. G. García, P. A. Roncagliolo and C. H. Muravchik, “A Practical RF Front-End for High Performace GNSS Receivers”, in Proc. 2011 International Conference on Localization and GNSS (ICL-GNSS), Tampere, 2011, pp. 104-109.
[6] ADF4360-4 Integrated Synthesizer and VCO, Analog Devices, Norwood, USA, 2004.
[7] ADF4360-5 Integrated Synthesizer and VCO, Analog Devices, Norwood, USA, 2004.
[8] ADF4360-9 Clock Generator PLL with Integrated VCO, Analog Devices, Norwood, USA, 2008.
[9] FOX924B 3.3V Ultra Miniature SMD HCMOS TCXO, FOX Electronics, Florida, USA, 2007.
[10] BSOF3S3E-010.0 Surface Mount 3.3V Stratum 3E HCMOS OCXO, Connor Winfield, Aurora, USA, 2003.
[11] E. Pérez Serna et. al., “Local Oscillator Phase Noise Effects on GNSS Code Tracking”, Inside GNSS, pp. 52-62, Nov. 2010.
[12] J. Cogo, J. G. Garcia, P. A. Roncagliolo and C. H. Muravchik, “High Speed Acquisition and Storage Platform for SDR Applications Development”, in Proc. VII Southern Conference on Programmable Logic (SPL), Córdoba, 2011, pp. 19-24.
[13] J. A. Smidt, J. G. García, P. A. Roncagliolo and C. H. Muravchik, “Algoritmo de Adquisición Rápida para Receptores de GLONASS de baja Complejidad”, in Proc. XIV Reunión de Trabajo en Procesamiento de la Información y Control (RPIC), Oro Verde, 2011, pp. 816-821.
[14] SE4110L: GPS Receiver IC, Skyworks, Woburn, USA, 2012. [15] STA5620 Fully Integrated RF Front-End Receiver for GPS Applications,
ST Microelectronics, 2011. [16] NJ1006A GPS Receiver RF Front-End IC, Nemerix, Manno,
Switzerland, 2005. [17] MAX2742 Single-Chip Global Positioning System Receiver Front-End,
Maxim Integrated Products, Sunnyvale, USA, 2008. [18] MAX2769 Universal GPS Receiver, Maxim Integrated Products,
Sunnyvale, USA, 2011.
Ramón López La Valle (S’11) received the Electronics engineering degree from the National University of La Plata (UNLP), Argentina, in 2008. He is currently M.Sc. student. He is a teaching assistant in the UNLP and member of Industrial Electronics, Control and Instrumentation Laboratory (LEICI). His research interests are in RF and microwave design techniques with
applications to Global Navigation Satellite Systems receivers for aerospace applications
Javier Gonzalo Garcia received the Electronics engineering degree from the National University of La Plata (UNLP) Argentina in 2003. He is currently a Ph.D. student and a Professor in the UNLP. He is currently involved in research and development of Global Navigation Satellite Systems receivers for aerospace applications. His research interests are in statistical signal
processing with applications to GNSS and Digital Communications.
Pedro Agustín Roncagliolo received the Ph.D. degree in Electronics engineering from the National University of La Plata (UNLP), Argentina. He is currently a Professor in the UNLP. His research interests are in statistical signal processing with applications to wireless communications and Global Positioning System (GPS).
Carlos H. Muravchik (S’81–M’83–SM’99) he graduated as an Electronics Engineer from the National University of La Plata, Argentina, in 1973, and received the M.Sc. degree in electrical engineering, the M.Sc. degree in statistics, and the Ph.D. degree in electrical engineering, all from Stanford University, Stanford, CA, in 1980, 1983,
and 1983, respectively. He is a Professor at the Department of the Electrical Engineering of the National University of La Plata and a member of its Industrial Electronics, Control and Instrumentation Laboratory (LEICI). He is also a member of the Comision de Investigaciones Cientificas de la Pcia. de Buenos Aires. He was a Visiting Professor to Yale University in 1983 and 1994; to the University of Illinois at Chicago in 1996, 1997, 1999, and 2003; and to Washington University in St. Louis in 2006 and 2010. His research interests are in the area of statistical and array signal processing with biomedical, communications and control applications, and in nonlinear control systems. Dr. Muravchik has been a member of the Advisory Board of the journal Latin American Applied Research since 1999 and was an Associate Editor of the IEEE TRANSACTIONS ON SIGNAL PROCESSING from 2003 to 2006.
LÓPEZ LA VALLE et al.: AN EXPERIMENTAL L1/L2 53