
An efficient improved photovoltaic irrigation system with artificial neural network based modeling...
7
An efficient improved photovoltaic irrigation system with artificial neural network based modeling of soil moisture distribution – A case study in Turkey Mahir Dursun a,⇑ , Semih Özden b,1 a Department of Electrical and Electronics Engineering, Faculty of Technology, Gazi University, Teknikokullar, 06500 Ankara, Turkey b Department of Electrical and Energy, OSTIM Vocational School, Gazi University, OSTIM, 06374 Ankara, Turkey article info Article history: Received 26 June 2013 Received in revised form 29 October 2013 Accepted 13 January 2014 Keywords: Artificial neural network Drip irrigation Soil moisture control Photovoltaic irrigation system abstract Although recent years have witnessed excellent technological improvements, the initial setup costs of solar energy systems remain very high. It is for this reason that solar systems have not become suffi- ciently widespread. Optimum selection of panel power increases the applicability of these systems while at the same time decreasing their cost. The choice of which panel power is to be installed in a solar pow- ered irrigation system will vary in direct proportion to the power of the pump supplying the water. In this study a reduction in pump power, and thus a reduction in the energy demand of the pump, is achieved by ensuring that the solar-powered drip irrigation system in an orchard is using water efficiently. To deter- mine which areas needed to be irrigated, the authors used a soil moisture distribution map obtained via the artificial neural networks method. Using the system and software they developed to determine the soil moisture distribution, they were able to obtain an even distribution of water. Thus by preventing unnecessary irrigation, not only was instantaneous water demand reduced, but it was also possible to ensure the protection of freshwater resources. The system developed by the authors was observed to reduce the orchard’s daily water and energy consumption by 38%. Thus, using the method applied, it was possible to reduce the amount of pump power, depending on the instantaneous water demand, the total power of the solar panels, the current values of the electrical motor, the battery and power con- trol units, and all other costs. Ó 2014 Elsevier B.V. All rights reserved. 1. Introduction In today’s world energy and clean water needs are the two most important global problems. While the majority of electrical energy consumed by pump motors is used for irrigation, irrigation systems also consume a significant amount of the world’s clean water. Water in traditional irrigation systems is distributed evenly regard- less of how much water the individual plants require. However, moisture distribution in the soil and the water demands of plants are not uniform. The result is that classical irrigation systems pro- vide unnecessary irrigation to one part of a field or orchard while leading to a lack of irrigation in other parts, thus causing a decrease in water and energy efficiency. It is for this reason that the efficient use of water and energy in agricultural drip irrigation systems is so important. Because they consume less water and energy, solar- powered drip irrigation systems are preferred for yielding crops, and using natural resources. Unfortunately, the high initial installa- tion costs are an obstacle to the spread of solar-powered drip irriga- tion systems, and this has prevented their immediate widespread use (Dursun and Ozden, 2012). In order to reduce installation costs and use energy efficiently, it is necessary to accurately estimate the water demand and moisture in the soil structure. In recent years, local (site-specific) irrigation systems have been developed to increase the efficiency of water and energy usage in order to avoid unnecessary irrigation or poor water distribution. This method not only allows for a reduction in operating costs (en- ergy, water), but also permits an increase in product efficiency (Aqeel ur et al., 2010; Jacobson et al., 1989; Kim and Evans, 2009; Miranda et al., 2005; Wang et al., 2006; Zazueta and Smajstr- la, 1992). In precision agriculture applications, especially sensor- based site-specific irrigation applications, the information ob- tained by the sensors is typically used to control the valves (Coates et al., 2013; Kalaivani et al., 2011). It has been shown that using wireless network technologies developed for the collection and processing of the data of the sensors in fields with especially http://dx.doi.org/10.1016/j.compag.2014.01.008 0168-1699/Ó 2014 Elsevier B.V. All rights reserved. ⇑ Corresponding author. Tel.: +90 (312) 202 85 26; fax: +90 (312) 212 00 59. E-mail addresses: [email protected] (M. Dursun), [email protected] (S. Özden). 1 Tel.: +90 (312) 354 84 01/1017; fax: +90 (312) 354 38 35. Computers and Electronics in Agriculture 102 (2014) 120–126 Contents lists available at ScienceDirect Computers and Electronics in Agriculture journal homepage: www.elsevier.com/locate/compag
Transcript of An efficient improved photovoltaic irrigation system with artificial neural network based modeling...

Computers and Electronics in Agriculture 102 (2014) 120–126
Contents lists available at ScienceDirect
Computers and Electronics in Agriculture
journal homepage: www.elsevier .com/locate /compag
An efficient improved photovoltaic irrigation system with artificialneural network based modeling of soil moisture distribution – A casestudy in Turkey
http://dx.doi.org/10.1016/j.compag.2014.01.0080168-1699/� 2014 Elsevier B.V. All rights reserved.
⇑ Corresponding author. Tel.: +90 (312) 202 85 26; fax: +90 (312) 212 00 59.E-mail addresses: [email protected] (M. Dursun), [email protected]
(S. Özden).1 Tel.: +90 (312) 354 84 01/1017; fax: +90 (312) 354 38 35.
Mahir Dursun a,⇑, Semih Özden b,1
a Department of Electrical and Electronics Engineering, Faculty of Technology, Gazi University, Teknikokullar, 06500 Ankara, Turkeyb Department of Electrical and Energy, OSTIM Vocational School, Gazi University, OSTIM, 06374 Ankara, Turkey
a r t i c l e i n f o a b s t r a c t
Article history:Received 26 June 2013Received in revised form 29 October 2013Accepted 13 January 2014
Keywords:Artificial neural networkDrip irrigationSoil moisture controlPhotovoltaic irrigation system
Although recent years have witnessed excellent technological improvements, the initial setup costs ofsolar energy systems remain very high. It is for this reason that solar systems have not become suffi-ciently widespread. Optimum selection of panel power increases the applicability of these systems whileat the same time decreasing their cost. The choice of which panel power is to be installed in a solar pow-ered irrigation system will vary in direct proportion to the power of the pump supplying the water. In thisstudy a reduction in pump power, and thus a reduction in the energy demand of the pump, is achieved byensuring that the solar-powered drip irrigation system in an orchard is using water efficiently. To deter-mine which areas needed to be irrigated, the authors used a soil moisture distribution map obtained viathe artificial neural networks method. Using the system and software they developed to determine thesoil moisture distribution, they were able to obtain an even distribution of water. Thus by preventingunnecessary irrigation, not only was instantaneous water demand reduced, but it was also possible toensure the protection of freshwater resources. The system developed by the authors was observed toreduce the orchard’s daily water and energy consumption by 38%. Thus, using the method applied, itwas possible to reduce the amount of pump power, depending on the instantaneous water demand,the total power of the solar panels, the current values of the electrical motor, the battery and power con-trol units, and all other costs.
� 2014 Elsevier B.V. All rights reserved.
1. Introduction powered drip irrigation systems are preferred for yielding crops,
In today’s world energy and clean water needs are the two mostimportant global problems. While the majority of electrical energyconsumed by pump motors is used for irrigation, irrigation systemsalso consume a significant amount of the world’s clean water.Water in traditional irrigation systems is distributed evenly regard-less of how much water the individual plants require. However,moisture distribution in the soil and the water demands of plantsare not uniform. The result is that classical irrigation systems pro-vide unnecessary irrigation to one part of a field or orchard whileleading to a lack of irrigation in other parts, thus causing a decreasein water and energy efficiency. It is for this reason that the efficientuse of water and energy in agricultural drip irrigation systems is soimportant. Because they consume less water and energy, solar-
and using natural resources. Unfortunately, the high initial installa-tion costs are an obstacle to the spread of solar-powered drip irriga-tion systems, and this has prevented their immediate widespreaduse (Dursun and Ozden, 2012). In order to reduce installation costsand use energy efficiently, it is necessary to accurately estimate thewater demand and moisture in the soil structure.
In recent years, local (site-specific) irrigation systems have beendeveloped to increase the efficiency of water and energy usage inorder to avoid unnecessary irrigation or poor water distribution.This method not only allows for a reduction in operating costs (en-ergy, water), but also permits an increase in product efficiency(Aqeel ur et al., 2010; Jacobson et al., 1989; Kim and Evans,2009; Miranda et al., 2005; Wang et al., 2006; Zazueta and Smajstr-la, 1992). In precision agriculture applications, especially sensor-based site-specific irrigation applications, the information ob-tained by the sensors is typically used to control the valves (Coateset al., 2013; Kalaivani et al., 2011). It has been shown that usingwireless network technologies developed for the collection andprocessing of the data of the sensors in fields with especially

M. Dursun, S. Özden / Computers and Electronics in Agriculture 102 (2014) 120–126 121
non-homogeneous soil structure or various types of plants reducesthe loss of water and energy (Charoenhirunyingyos et al., 2011;Mas and Flores, 2008). However, these newly developed wirelesssensor network structures are not feasible due to their high instal-lation costs. Studies in the next period focused on lowering thecosts of systems being developed to a level where producers couldactually use them (Angelopoulos et al., 2011; Dursun and Karaman,2009; Ozden and Dursun, 2011; Vellidis et al., 2007, 2008).
There are various algorithms and applications to determine soilmoisture values with or without sensors. With the development oflearning, estimation, and decision-making algorithms, studies onthe application of these algorithms in the agricultural field havebegun to appear (Alavi et al., 2010; Veronez et al., 2010; Yanget al., 1997). These studies have made estimations of soil moistureacross several parameters using new control and estimation algo-rithms (Ahmad et al., 2010; Ramirez-Beltran et al., 2010). Thesestudies usually tested Artificial Neural Networks (ANN), Fuzzy Lo-gic (FL), and Genetic Algorithms (GA), or combinations of thesealgorithms (Pulido-Calvo and Gutierrez-Estrada, 2009). In the stud-ies using satellite images and meteorological data, ANN was mostoften used to determine quite realistic approaches in large-scalesystems (Elshorbagy and Parasuraman, 2008; Jiang and Cotton,2004; Mas and Flores, 2008). ANN is not only used in irrigationbut also fertilization, and the control and prediction of soil chemi-cals (Akbarzadeh et al., 2009; Dursun and Karaman, 2009; Li et al.,2004). ANN is among the most accurate methods of determiningsoil moisture distribution.
Unlike in previous studies, the combined use of new moistureestimation and sensing techniques in this study enabled a moreefficient use of the energy and clean water resources which aredecreasing daily. The moisture distribution in the soil of a small-scale area was estimated via ANN using moisture information ob-tained by Radio Frequency (RF) from moisture sensors placed inthe soil and this was used to control a complete solar irrigation sys-tem. Using the system developed, real-time moisture measure-ments were taken, instantaneous decisions were enabled, andirrigation was controlled in accordance with variable conditions(weather conditions, terrain, tree age, type of tree and soil). Insteadof using the method used in the literature (namely, only estimatingsoil moisture via ANN using meteorological data to determinemoisture distribution), the estimation method used in this studywas to use real moisture values for both irrigation control systemsand for future irrigation and energy planning. In addition, the costwas reduced by using low-cost RF, unlike studies using high-frequency and technological wireless communication. In thisway, by increasing the applicability of the system, both the dailyenergy consumption of water and daily costs were reduced by upto 38%. This enabled irrigation to be based on soil moisture, there-by instantly reducing unnecessary irrigation and water require-ments. In addition, instantaneous and additional energy needswere reduced accordingly. As a result of the data obtained usingthe ANN, energy and water consumption, soil moisture, the num-ber of sensors, and the solar-powered drip irrigation system, initialsetup costs (irrigation pump, solar panel, labor) were reduced andthe applicability of the system was increased.
2. RF soil moisture measurement system
The study was applied to over 8 decares of dwarf cherry treeslocated at 40�10048.120 0 north and 35�51059.210 0 east in the Zile dis-trict of the Tokat province of Turkey. Fig. 1 shows the layout of thearea where the study was applied. One of the two pumps in thesystem was used to send the water in the lake to the storage tankand the other one was used to send the water taken from the tankto the drip irrigation system. Electrical energy for both pumps was
obtained from solar panels. Soil moisture values were obtainedfrom sensor units mounted on the site where the trees were lo-cated. Moisture values perceived via the analog channel of themicroprocessor were collected in the central unit by radio fre-quency. Measurement point information and soil moisture valuescoming to the central unit were recorded on a computer using soft-ware developed by the authors. Energy for all units was suppliedby 10 W solar panels.
In this study a Decagon brand 10HS model moisture sensormeasured the soil volumetric water content via the capacitancetechnique using the dielectric properties of the water. A UDEAbrand UFM-M11 model RFM was used for RF communication. Tothis low power module using the frequency of 434 MHz was addeda UGPA-434 model antenna, which is capable of multicasting andcapable of communicating up to 400–500 m in the open area. Forthe modulation technique, the module used the Frequency ShiftKeying (FSK) method. The location of the sensor placed under-ground and an image of the mounted sensor unit in the applicationarea are given in Figs. 2 and 3, respectively.
3. Artificial neural networks and the model
Inspired by the physiology of the human brain, Artificial NeuralNetworks (ANN) are computer programs that can mimic neural net-works. ANNs have self-learning mechanisms, and in addition to this,they also have the ability to create relationships between memoriza-tion and the information itself (Elshorbagy and Parasuraman, 2008).In the most general sense, a neural network is a complex systemresulting from the connection of the brain’s many nerve cells withvarious impact levels. An ANN can be applied successfully in areaswhere the functional characteristics are similar to those of the hu-man brain: learning, classification, function prediction, finding themost appropriate value, data classification, and the determinationand association of features. The human brain is at an unapproach-able level in terms of information processing, concept association,and inference mechanisms. However, as ANNs continue to performbetter and better in complex processes, their application areas areexpanding on a daily basis (Izgi et al., 2012; Moreno et al., 2011).
In Fig. 4, an artificial neural network model which has one out-put, multiple inputs, and two hidden layers is given. The two hid-den layers are the j and k neurons. In Fig. 4 the terms are named asfollows:
(n): Iteration number (n. iteration).bi(n): Bias value.yi(n): i. Input value.wji(n): Weight value between i. and j.tj(n): Input value of j cell.u(�): Activation function.dk(n): Target output value.ek(n): Error at n. iteration between the real and desired value.
Knowing that m is the cell number in the hidden layer, the ac-tual output value which belongs to a cell in the forward-feed net-work can be obtained from Eq. (1).
yjðnÞ ¼ uXm
i¼0
wjiðnÞyiðnÞ þ biðnÞ !
ð1Þ
The hyperbolic tangent transfer function which is given inEq. (2) has been used as the activation function in this study.
uðxÞ ¼ ex � e�x=ex þ e�x ð2Þ
The goal in an ANN is to minimize the error value. Weight val-ues are updated until the error falls below the specified value. Var-ious algorithms and methods can be used to update weight values.
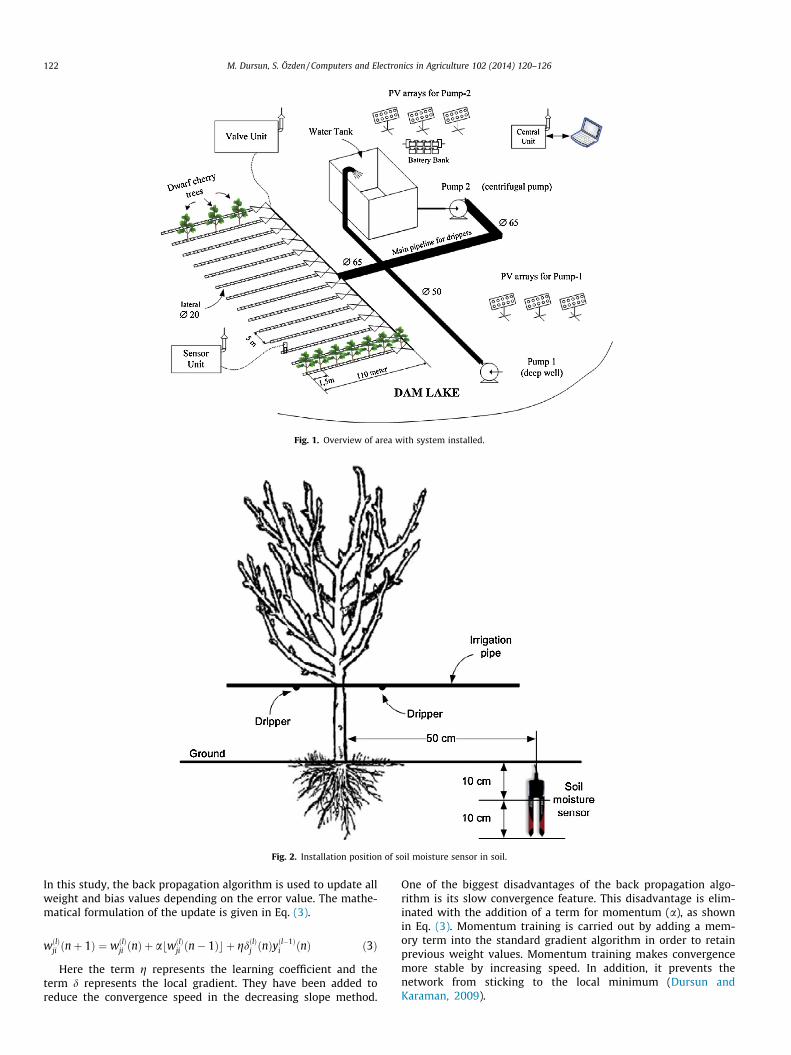
Fig. 1. Overview of area with system installed.
Fig. 2. Installation position of soil moisture sensor in soil.
122 M. Dursun, S. Özden / Computers and Electronics in Agriculture 102 (2014) 120–126
In this study, the back propagation algorithm is used to update allweight and bias values depending on the error value. The mathe-matical formulation of the update is given in Eq. (3).
wðlÞji ðnþ 1Þ ¼ wðlÞji ðnÞ þ abwðlÞji ðn� 1Þc þ gdðlÞj ðnÞyðl�1Þi ðnÞ ð3Þ
Here the term g represents the learning coefficient and theterm d represents the local gradient. They have been added toreduce the convergence speed in the decreasing slope method.
One of the biggest disadvantages of the back propagation algo-rithm is its slow convergence feature. This disadvantage is elim-inated with the addition of a term for momentum (a), as shownin Eq. (3). Momentum training is carried out by adding a mem-ory term into the standard gradient algorithm in order to retainprevious weight values. Momentum training makes convergencemore stable by increasing speed. In addition, it prevents thenetwork from sticking to the local minimum (Dursun andKaraman, 2009).

Fig. 3. View of installed sensor unit.
M. Dursun, S. Özden / Computers and Electronics in Agriculture 102 (2014) 120–126 123
dkðnÞ ¼ ekðnÞu0ðtkðnÞÞ ð4Þ
The local gradient dk(n) is obtained as shown in Eq. (4) in caseswhere the neuron is the output neuron. However, if the neuron isin a hidden layer, then the error signal of the neuron in the hiddenlayer is determined in terms of the error signals in the next layer.In a case where the neuron is the output neuron, the local gradientis calculated as in Eq. (5).
djðnÞ ¼ u0ðtjðnÞÞX
k
dkðnÞwkjðnÞ ð5Þ
Fig. 5. ANN modeling of soil moisture.
4. Using artificial neural networks to model soil moisture
In site-specific irrigation systems using soil moisture sensors, theareas where the sensors are to be placed are very important. Espe-cially on large tracts of land, increasing the number of sensors in or-der to reduce errors in irrigation would create another cost. Moisturemapping of the soil according to the irrigation pattern will eliminatethis disadvantage. In this study, the moisture distribution in the soilwas determined with using ANN by training the values obtainedfrom soil moisture sensors placed in the area. The pumping energyrequired was reduced by preventing the irrigation of areas wherethe soil had high moisture values. This prevented the productionof excess energy and reduced the number or solar panels needed.
Water flow in sensor-based irrigation methods is controlled byelectrovalves. By preparing the moisture map, the number of
Fig. 4. An artificial neur
electrovalves placed on laterals was reduced in the first phase ofthe study. In addition, it was possible to irrigate the areas withsimilar properties using a single line by regulating the placementof drip irrigation pipes in the soil. This helped to reduce the num-ber of sensors by eliminating the placement of sensors in areaswith similar moisture features.
The model used for mapping soil moisture using ANN is given inFig. 5. The values were trained by the ANN in a network structurewith two hidden layers (2-6-6-1) with two inputs, one output, andsix neurons. The input parameters of the ANN were comprised ofvolumetric water content (VMC) obtained from 15 of the sensorspowered by solar energy. Soil moisture distribution was deter-mined according to the data obtained from the ANN’s output.
The data obtained from the soil moisture sensors were recordedusing the software developed by the authors. The recording pro-cess started at 9:30 and continued until 17:30. A sample takenevery hour from the data obtained during the day was applied asan input to the ANN.
The actual (measured) VWC values obtained from the soil mois-ture sensors at 09:30 and the data obtained as a result of ANNtraining and the error values (VWC and in ‰) between them are gi-ven in Table 1. The coordinates making up the input variables ofthe ANN are given in the first and second column. The other col-umns are output values. The real VWC error was achieved by com-paring the measured value and estimated value obtained by theANN. Using the weight values obtained from training the ANN, a3D view of VWC distribution can be seen in Fig. 6. A contour viewof VWC distribution is given in Fig. 7. Error variation versus thenumber of iterations through ANN training is shown in Fig. 8,and the difference between the real VWC values and the ones ob-tained from the ANN is given in Fig. 9.
A 2D (contour) view of the variation of VWC distribution in thesoil during the day (from 09:30 to 17:30) using the weight valuesobtained from training the ANN is given in Fig. 10. The distributionof soil moisture is strongly heterogeneous in Fig. 10(a), at 09:30.After irrigation started, the red areas disappeared (Fig. 10(b)).The next figure shows that the red area started to move to thecenter of the area. In Fig. 10(d), the measured values obtained by
al network model.

Table 1Comparison results between measured VWC and output of ANN at the time 09:30.
Input Output
Coordinate (meter) Measured % VWC ANN % VWC Error % VWC Error ‰
North West
0 0 18.18460 18.18641 �0.0018 0.100 10 19.17000 19.16922 0.0008 0.040 20 19.42217 19.42131 0.0009 0.04
10 0 17.97640 17.97041 0.0060 0.3310 10 18.88061 18.87763 0.0030 0.1610 20 18.56000 18.56199 �0.0020 0.1120 0 19.16532 19.17312 �0.0078 0.4120 10 18.88061 18.88917 �0.0086 0.4520 20 19.30000 19.30092 �0.0009 0.0530 0 19.54351 19.54210 0.0014 0.0730 10 19.16532 19.15784 0.0075 0.3930 20 18.88000 18.87707 0.0029 0.1540 0 18.55728 18.55664 0.0006 0.0340 10 19.54351 19.54367 �0.0002 0.0140 20 19.28061 19.28173 �0.0011 0.06
Fig. 6. 3D view of VWC distribution in the soil (time: 09:30).
Fig. 7. Contour view of VWC distribution in the soil (time: 09:30).
Fig. 8. Error variation versus number of iterations of ANN training (time: 09:30).
Fig. 9. Comparison between real and ANN training output values (time: 09:30).
124 M. Dursun, S. Özden / Computers and Electronics in Agriculture 102 (2014) 120–126
the sensors show a diagonal distribution. After that, the figures donot change significantly. At the end of the day, the soil moisturedistribution of the area was not homogenous (Fig. 10(f)).
The drip irrigation system organized according soil moisturedistribution obtained by the ANN was controlled according to thedata coming from the sensors. The VWC distribution obtainedusing this kind of irrigation can be seen in Fig. 11. The distributionin the early hours of the day is not even in Fig. 11(a). After

Fig. 10. Variation of VWC distribution in the soil during the day without any control. (a) Time: 09:30, (b) time: 10:30, (c) time: 11:30, (d) time: 13:30, (e) time: 15:30, and (f)time: 17:30.
Fig. 11. Variation of VWC distribution in the soil during the day by irrigation controlled using ANN. (a) Time: 09:30, (b) time: 10:30, (c) time: 11:30, (d) time: 13:30, (e) time:15:30, and (f) time: 17:30.
M. Dursun, S. Özden / Computers and Electronics in Agriculture 102 (2014) 120–126 125

126 M. Dursun, S. Özden / Computers and Electronics in Agriculture 102 (2014) 120–126
irrigation started, the red2 areas disappeared significantly inFig. 11(b). In the next figure the distribution of moisture in the soilmoves to the north-east side of the area due to the terrain, ages ofthe trees, and weather conditions. In Fig. 11(c) it is clear that theslope of the terrain is particularly affected in Fig. 11(d–e). At theend of the day it is apparent that moisture distribution in the fieldwas almost evenly distributed in Fig. 11(f).
When the application results are compared after they are re-corded into the computer’s memory using the data collection sys-tem, it is calculated that hourly water consumption was decreasedby 38% with the application of the new system developed by theresearchers and ANN modeling. This figure was obtained basedon the number of trees and thus, the amount of water consumed.In the application, three drip emitters with 2 l/h drip capacity wereinstalled for each tree. The hourly water demand of 1000 trees is6000 l. Using the system developed by the researchers, a gain of2280 l of water was achieved. This gain can be calculated as a gainof 38%.
5. Conclusion
In this study, a moisture map of an orchard has been estimatedby training the data coming from 15 moisture sensors located in anarea using the ANN method in a solar powered irrigation system.The distribution obtained enabled both a reduction in the costsof the irrigation control system and a more efficient use of the en-ergy and clean water resources which are decreasing daily. Pre-venting unnecessary water use reduced the pumping energyrequirements by decreasing water consumption. A decrease inthe pumping energy needed caused a reduction in the motorpower driving the pump, and consequently led to a reduction inthe number of solar panels. In addition to this, irrigation of treeswith no more than the necessary amount of water increases theirproduct yield. In fields with non-homogeneous soil structuresand on sloping terrain in particular, in fields with trees of varyingtypes and ages, that is, in fields where water rates in the soil showvariation, the usage of solar powered irrigation systems have in-creased. Hourly water demand was calculated to decrease by 38%as a result of using the system and ANN model developed by theauthors. Thus, the number of solar panels, which forma large partof the initial setup costs and supply energy for the whole system,as well as the control values of electric motors, batteries, andpower, was reduced by the same percentage value using the ap-plied method.
Acknowledgments
This project, officially named 00228.STZ.2008-1 SANTEZ, wasfunded by the Turkish Ministry of Science, Industry, and Technol-ogy and Zile Mercantile Exchange.
References
Ahmad, S., Kalra, A., Stephen, H., 2010. Estimating soil moisture using remotesensing data: a machine learning approach. Adv. Water Resour. 33 (1), 69–80.
Akbarzadeh, A., Mehrjardi, R.T., Lake, H.R., Ramezanpour, H., 2009. Application ofartificial intelligence in modeling of soil properties (case study: Roodbar Region,North of Iran). Environ. Res. J. 3 (2), 19–24.
2 For interpretation of color in Figs. 10 and 11, the reader is referred to the webversion of this article.
Alavi, A.H., Gandomi, A.H., Mollahassani, A., Heshmati, A.A., Rashed, A., 2010.Modeling of maximum dry density and optimum moisture content of stabilizedsoil using artificial neural networks. J. Plant Nutr. Soil Sci. 173 (3), 368–379.
Angelopoulos, C.M., Nikoletseas, S., Theofanopoulos, G.C., 2011. A smart system forgarden watering using wireless sensor networks. In: 9th ACM InternationalSymposium on Mobility Management and Wireless Access, pp. 167–170.
Aqeel ur, R., Shaikh, Z.A., Yousuf, H., Nawaz, F., Kirmani, M., Kiran, S., 2010. Cropirrigation control using Wireless Sensor and Actuator Network (WSAN). In:International Conference on Information and Emerging Technologies (ICIET),pp. 1–5.
Charoenhirunyingyos, S., Honda, K., Kamthonkiat, D., Ines, A.V.M., 2011. Soilmoisture estimation from inverse modeling using multiple criteria functions.Comput. Electron. Agric. 75 (2), 278–287.
Coates, R.W., Delwiche, M.J., Broad, A., Holler, M., 2013. Wireless sensor networkwith irrigation valve control. Comput. Electron. Agric. 96 (1), 13–22.
Dursun, M., Karaman, M.R., 2009. Artificial neural network based modeling ofspatial distribution of phosphorus on the tomato area. Asian J. Chem. 21 (1),239–247.
Dursun, M., Ozden, S., 2012. Application of solar powered automatic water pumpingin Turkey. Int. J. Comput. Electr. Eng. 4 (2), 161–164.
Elshorbagy, A., Parasuraman, K., 2008. On the relevance of using artificial neuralnetworks for estimating soil moisture content. J. Hydrol. 362 (1–2), 1–18.
Izgi, E., Oztopal, A., Yerli, B., Kaymak, M.K., Sahin, A.D., 2012. Short-mid-term solarpower prediction by using artificial neural networks. Sol. Energy 86 (2), 725–733.
Jacobson, B.K., Jones, P.H., Jones, J.W., Paramore, J.A., 1989. Real-time greenhousemonitoring and control with an expert system. Comput. Electron. Agric. 3 (4),273–285.
Jiang, H.L., Cotton, W.R., 2004. Soil moisture estimation using an artificial neuralnetwork: a feasibility study. Can. J. Remote Sens. 30 (5), 827–839.
Kalaivani, T., Allirani, A., Priya, P., 2011. A survey on Zigbee based wireless sensornetworks in agriculture. In: 3rd International Conference on Trends inInformation Sciences and Computing (TISC), pp. 85–89.
Kim, Y., Evans, R.G., 2009. Software design for wireless sensor-based site-specificirrigation. Comput. Electron. Agric. 66 (2), 159–165.
Li, J.S., Yoder, R.E., Odhiambo, L.O., Zhang, J., 2004. Simulation of nitrate distributionunder drip irrigation using artificial neural networks. Irrigation Sci. 23 (1), 29–37.
Mas, J.F., Flores, J.J., 2008. The application of artificial neural networks to theanalysis of remotely sensed data. Int. J. Remote Sens. 29 (3), 617–663.
Miranda, F.R., Yoder, R.E., Wilkerson, J.B., Odhiambo, L.O., 2005. An autonomouscontroller for site-specific management of fixed irrigation systems. Comput.Electron. Agric. 48 (3), 183–197.
Moreno, A., Gilabert, M.A., Martinez, B., 2011. Mapping daily global solar irradiationover Spain: a comparative study of selected approaches. Sol. Energy 85 (9),2072–2084.
Ozden, S., Dursun, M., 2011. Remote monitoring and control of PV powered dripirrigation system with soil moisture sensors. In: The Third InternationalConference on Computer Engineering and Technology (ICCET), pp. 239–244.
Pulido-Calvo, I., Gutierrez-Estrada, J.C., 2009. Improved irrigation water demandforecasting using a soft-computing hybrid model. Biosyst. Eng. 102 (2), 202–218.
Ramirez-Beltran, N.D., Calderon-Arteaga, C., Harmsen, E., Vasquez, R., Gonzalez, J.,2010. An algorithm to estimate soil moisture over vegetated areas based onin situ and remote sensing information. Int. J. Remote Sens. 31 (10), 2655–2679.
Vellidis, G., Garrick, V., Pocknee, S., Perry, C., Kvien, C., Tucker, M., 2007. Howwireless will change agriculture. In: Sixth European Conference on PrecisionAgriculture, pp. 57–67.
Vellidis, G., Tucker, M., Perry, C., Wen, C., Bednarz, C., 2008. A real-time wirelesssmart sensor array for scheduling irrigation. Comput. Electron. Agric. 61 (1), 44–50.
Veronez, M.R., Wittmann, G., Reinhardt, A.O., Da Silva, R.M., 2010. Surfacetemperature estimation using artificial neural network. In: ISPRS TC VIISymposium, pp. 612–617.
Wang, N., Zhang, N.Q., Wang, M.H., 2006. Wireless sensors in agriculture and foodindustry – recent development and future perspective. Comput. Electron. Agric.50 (1), 1–14.
Yang, C.C., Prasher, S.O., Mehuys, G.R., 1997. An artificial neural network to estimatesoil temperature. Can. J. Soil Sci. 77 (3), 421–429.
Zazueta, F.S., Smajstrla, A.G., 1992. Microcomputer-based control of irrigationsystems. Appl. Eng. Agric. 8 (5), 593–596.


















