
An Architecture for Scheduling and Control in Flexible Manufacturing Systems Using Distributed...
20
An Architecture for An Architecture for Scheduling and Control Scheduling and Control in Flexible in Flexible Manufacturing Systems Manufacturing Systems Using Distributed Using Distributed Objects Objects TsuTa Tai and TsuTa Tai and Thomas O. Boucher Thomas O. Boucher Presented by: Presented by: Ammon Johnson Ammon Johnson November 10, 2008 November 10, 2008
-
date post
20-Dec-2015 -
Category
Documents
-
view
213 -
download
0
Transcript of An Architecture for Scheduling and Control in Flexible Manufacturing Systems Using Distributed...

An Architecture for An Architecture for Scheduling and Control in Scheduling and Control in
Flexible Manufacturing Flexible Manufacturing Systems Using Distributed Systems Using Distributed
ObjectsObjectsTsuTa Tai and TsuTa Tai and
Thomas O. BoucherThomas O. Boucher
Presented by:Presented by:Ammon JohnsonAmmon Johnson
November 10, 2008November 10, 2008
Function of PaperFunction of Paper
Use a decentralized approach to Use a decentralized approach to solve scheduling problemssolve scheduling problems
Optimize scheduling when changes Optimize scheduling when changes happen in the system happen in the system
Deadlock avoidanceDeadlock avoidance Compare effectiveness and Compare effectiveness and
computation timecomputation time

ImportanceImportance
Reducing deadlock, time to Reducing deadlock, time to manufacture (makespan) will manufacture (makespan) will improve profitability of the improve profitability of the manufacturing operationmanufacturing operation
Scheduling is dynamic; Sudden Scheduling is dynamic; Sudden changes can adversely affect changes can adversely affect productivityproductivity

ReferencesReferencesREFERENCES[1] N. Costa and M. Garetti, “Design of a control system for a flexible manufacturingcell,” J. Manuf. Syst., vol. 4, pp. 65–84, 1984.[2] T. O. Boucher,M. A. Jafari, and G. A. Meredith, “Petri net control of anautomated manufacturing cell,” Adv. Manuf. Eng., vol. 2, pp. 151–157,1990.[3] H. P. Huang and P. C. Chang, “Specification, modeling and control of aflexible manufacturing cell,” Int. J. Prod. Res., vol. 30, pp. 2515–2543,1992.[4] S. B. Joshi, E. G. Mettala, J. S. Smith, and R. A.Wysk, “Formal modelsfor control of flexible manufacturing cells: Physical and system models,”IEEE Trans. Robot. Automat., vol. 11, pp. 558–570, Aug. 1995.[5] A.Yalcin and T. O. Boucher, “An architecture for flexible manufacturingcells with alternate machining and alternate sequencing,” IEEE Trans.Robot. Automat., vol. 15, pp. 1126–1130, Dec. 1999.[6] N. Viswandham, Y. Narahari, and T. L. Johnson, “Deadlock preventionand deadlock avoidance in flexible manufacturing systems using Petrinet models,” IEEE Trans. Robot. Automat., vol. 6, pp. 713–723, Dec.1990.[7] J. Ezpeleta, J. M. Colom, and J. Martinez, “A Petri net-based deadlockprevention policy for flexible manufacturing systems,” IEEE Trans.Robot. Automat., vol. 11, pp. 173–184, Apr. 1995.[8] J. Ezpeleta and J. M. Colom, “Automatic synthesis of colored Petri netsfor control of FMS,” IEEE Trans. Robot. Automat., vol. 13, pp. 327–337,June 1997.

References (cont.)References (cont.)[9] R. A.Wysk, N. S. Yang, and S. Joshi, “Detection of deadlocks in flexiblemanufacturing cells,” IEEE Trans. Robot. Automat., vol. 7, pp. 853–859,Dec. 1991.[10] , “Resolution of deadlocks in flexible manufacturing systems:Avoidance and recovery approaches,” J. Manuf. Syst., vol. 13, pp.128–138, 1999.[11] Z. A. Banaszak and B. H. Krogh, “Deadlock avoidance in flexible manufacturingsystems with concurrently competing process flows,” IEEETrans. Robot. Automat., vol. 6, pp. 724–734, Dec. 1990.[12] F. S. Hsieh and S. C. Chang, “Dispatching-driven deadlock avoidancecontroller synthesis for flexible manufacturing systems,” IEEE Trans.Robot. Automat., vol. 10, pp. 196–209, Apr. 1994.[13] K. Y. Xing, B. S. Hu, and H. X. Chen, “Deadlock avoidance policy forPetri net modeling of flexible manufacturing systems with shared resources,”IEEE Trans. Automat. Contr., vol. 41, pp. 289–295, Feb. 1996.[14] M. P. Fanti, B. Maione, S. Mascolo, and B. Turchiano, “Event-basedfeedback control for deadlock avoidance in flexible production systems,”IEEE Trans. Robot. Automat., vol. 13, pp. 347–363, June 1997.[15] M. A. Lawley, S. A. Reveliotis, and P. M. Ferreira, “A correct andscaleable deadlock avoidance policy for flexible manufacturing systems,”IEEE Trans. Robot. Automat., vol. 14, pp. 796–809, Oct. 1998.[16] N. Q. Wu, “Necessary and sufficient conditions for deadlock-free operationin flexible manufacturing system using colored Petri net model,”IEEE Trans. Syst., Man, Cybern., vol. 29, pp. 192–204, May 1999.[17] M. A. Lawley, “Deadlock avoidance for production systems with flexiblerouting,” IEEE Trans. Robot. Automat., vol. 15, pp. 497–509, June1999.
References (cont.)References (cont.)[18] A. Yalcin and T. O. Boucher, “Deadlock avoidance in flexible manufacturingsystems using finite automata,” IEEE Trans. Robot. Automat.,vol. 16, pp. 424–429, Aug. 2000.[19] T. O. Boucher, A. Yalcin, and T. Tai, “Dynamic routing and the performanceof automated manufacturing cells,” IIE Trans., vol. 32, no. 10,pp. 975–988, 2000.[20] D. Y. Lee and F. DiCesare, “Scheduling flexible manufacturing systemsusing Petri nets and heuristic search,” IEEE Trans. Robot. Automat., vol.10, pp. 123–132, Apr. 1994.[21] S. E. Ramaswamy and S. B. Joshi, “Deadlock-free schedules for automatedmanufacturing workstations,” IEEE Trans. Robot. Automat., vol.12, pp. 391–400, June 1996.[22] H. H. Xiong and M. C. Zhou, “A Petri net method for deadlock-freescheduling of flexible manufacturing systems,” Int. J. Intell. Contr. Syst.,vol. 3, pp. 277–295, 1999.[23] J. Pearl, Heuristics: Intelligent Search Strategies for Computer ProblemSolving. Reading, MA: Addison-Wesley, 1984.[24] R. E. Tarjan, “Depth first search and linear graph algorithm,” SIAM J.Comput., vol. 1, pp. 146–160, 1972.[25] A. Yalcin, “Architectures for automated flexible manufacturing cellswith routing flexibility,” Ph.D. dissertation, Rutgers Univ., NewBrunswick, NJ, 2000.[26] J. Ferber, Multi-Agent Systems. Reading, MA: Addison-Wesley, 1999.[27] R. Smith, “The contract net protocol: High-level communication andcontrol in a distributed problem solver,” IEEE Trans. Comput., vol.C–23, pp. 1104–1113, 1980.
References (cont.)References (cont.)
[28] R. Smith and R. Davis, “Framework for co-operation in distributedproblem solving,” IEEE Trans. Syst., Man, Cybern., vol. SMC–11, pp.61–70, 1981.[29] W. D. Kelton, R. P. Sadowski, and D. A. Sadowski, Simulation WithArena. New York: McGraw-Hill, 1998.[30] D. C. Montgomery, Design and Analysis of Experiments. New York:Wiley, 1976.[31] T. Tai and T. O. Boucher, “Scheduling With Distributed Objects: SourceCode and Experimental Trials,” Ind. Eng. Dept., Rutgers Univ., Piscataway,NJ, Working Paper #01-119, 2001.

Relation to ME 482 Relation to ME 482
Scheduling is one of the most Scheduling is one of the most complex aspects of FMScomplex aspects of FMS
Optimizing the scheduling of tasks is Optimizing the scheduling of tasks is a tedious task, so computers are a tedious task, so computers are used to optimize the schedulingused to optimize the scheduling

Basic Design ConceptBasic Design Concept
Shop Floor Object
(Central control computer)
Cell Object
Cell Object
Cell Object

Basic Design ConceptBasic Design Concept
Shop Floor Object
(Central control computer)
Cell Object
Cell Object
Cell Object
New Part
Determines cell with shortest “makespan”
Part goes to cell with shortest makespan

Design PrincipleDesign Principle
Algorithm developmentAlgorithm development DFS (Depth First Search)- looks for endDFS (Depth First Search)- looks for end DFS with Greedy HeuristicDFS with Greedy Heuristic DFS Greedy with Knot DetectionDFS Greedy with Knot Detection

Process plan and digraphs for Process plan and digraphs for one cell objectone cell object
In this example the cells algorithm generates a legal sequence of events, and avoids deadlock to finish both parts.
May be more than one legal sequence. Cell object generates a schedule that finishes all current parts and the new part.

DigraphsDigraphs
DFS Greedy HeuristicDFS Greedy Heuristic
DFS Greedy withDFS Greedy with
Knot detectionKnot detection
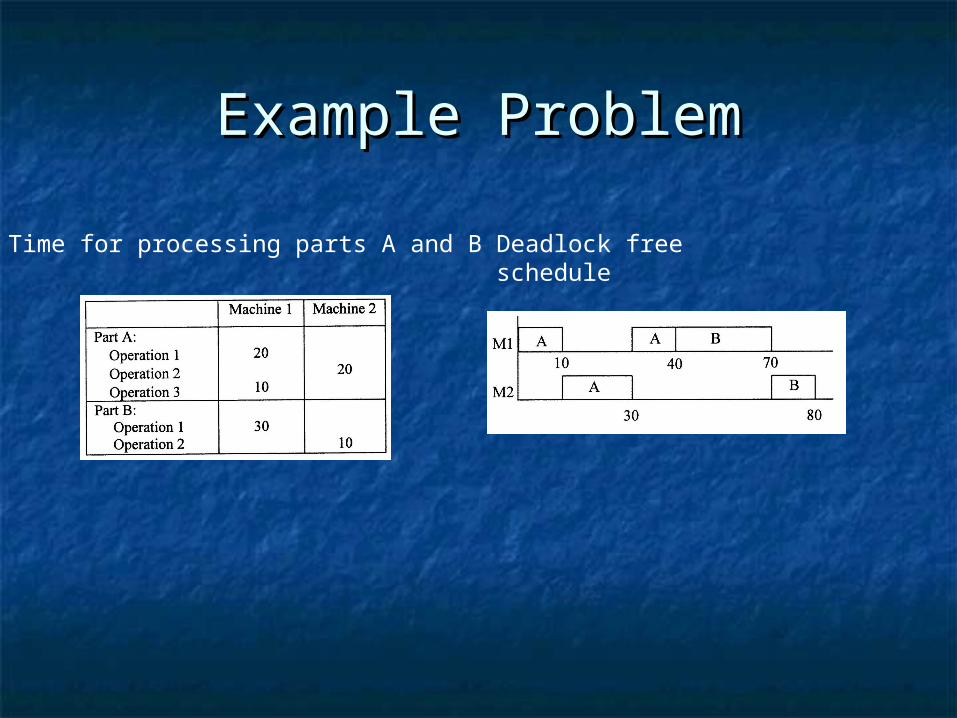
Example ProblemExample Problem
Time for processing parts A and B Deadlock free schedule
Experimental TrialsExperimental Trials
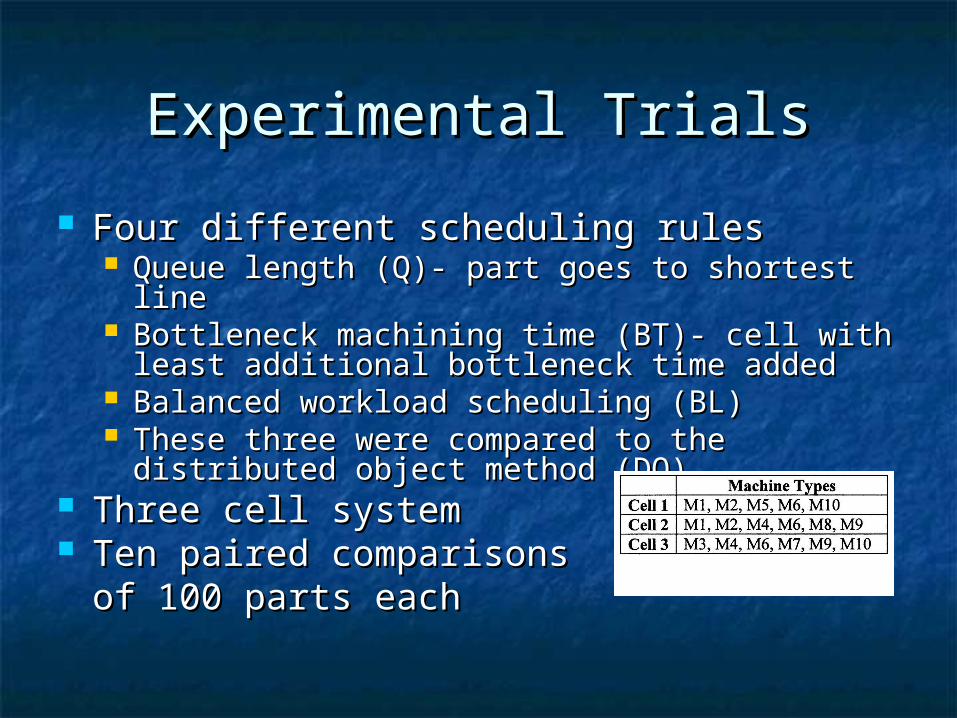
Four different scheduling rulesFour different scheduling rules Queue length (Q)- part goes to shortest lineQueue length (Q)- part goes to shortest line Bottleneck machining time (BT)- cell with least Bottleneck machining time (BT)- cell with least
additional bottleneck time addedadditional bottleneck time added Balanced workload scheduling (BL)Balanced workload scheduling (BL) These three were compared to the distributed These three were compared to the distributed
object method (DO)object method (DO) Three cell systemThree cell system Ten paired comparisons Ten paired comparisons
of 100 parts eachof 100 parts each
Experimental EquipmentExperimental Equipment
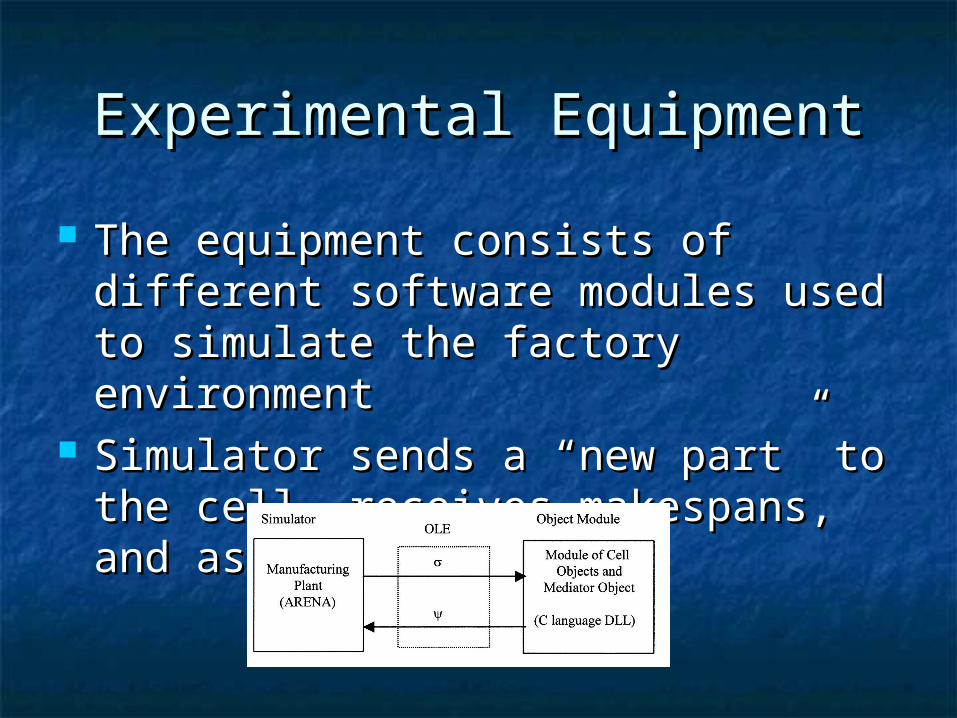
The equipment consists of different The equipment consists of different software modules used to simulate software modules used to simulate the factory environmentthe factory environment
Simulator sends a “new part” to the Simulator sends a “new part” to the cell, receives makespans, and cell, receives makespans, and assigns the partassigns the part

Experimental ResultsExperimental Results
Algorithms discussed were appliedAlgorithms discussed were applied Distributed object scheduling Distributed object scheduling
compared with Q, BL, and BTcompared with Q, BL, and BT

Experimental ResultsExperimental Results
Average makespan 9-14% lower than Average makespan 9-14% lower than other methodsother methods
Throughput is increasedThroughput is increased Computation is very fastComputation is very fast
Correlation of Results with Correlation of Results with ModelModel
Authors are unsure of source of Authors are unsure of source of improvement in performanceimprovement in performance
Not a very complex system (3 cells)Not a very complex system (3 cells) The simulation is both model and The simulation is both model and
experimentexperiment
Practical Industrial Use and Practical Industrial Use and AdvancementAdvancement
Shows that throughput was increased, Shows that throughput was increased, makespan decreased in simulationmakespan decreased in simulation
No comparison with actual hardwareNo comparison with actual hardware Advancement in scheduling FMS, Advancement in scheduling FMS,
improving productionimproving production Industries that use FMS systems, Industries that use FMS systems,
auto, aerospace, etc.auto, aerospace, etc.


















