An Approach to Modeling and Analysis of Propulsion Electric Drives · 2015-12-07 · Troy V....
16
Troy V. Nguyen, Donald C. Simon, Northrop Grumman Corporation – Electronic Systems, Naval & Marine Systems Division, Charlottesville, Virginia USA An Approach to Modeling and Analysis of Ship Propulsion Electric Drives ABSTRACT Design of high-performance electric propulsion systems requires thorough dynamic analysis of both the electric power and propulsion systems. This paper presents a simple but effective method to model the relevant components in the electric and propulsion plants to facilitate the integration and analysis of the entire system for the purpose of predicting the overall system performance. The objective is to illustrate an approach to integrate the electric and propulsion subsystems in a modeling and simulation environment that can potentially expose alternatives in component design. By way of examples, the paper addresses modeling, analysis, and validation of electric motor propulsion systems as well as hybrid systems that consist of a gas turbine engine and an electric motor driving the same propeller shaft. An instance of the hybrid propulsion systems is the LHD 8 propulsion design discussed in a recent conference publication by the NAVSEA engineering staff. A specific issue in the hybrid propulsion system is the starting of a shaft on electric drive and then clutching in the gas turbine engine. This scenario exists in the system due to differences in operational speed range and performance dynamics of the gas turbine and the electric motor. Using the resulting system model, the examples in the paper will demonstrate the behavior of the subsystems based on this particular scenario. The dynamic models under consideration are representative of the actual systems and are sufficiently robust for use in a preliminary design analysis of electric propulsion drives. An added benefit of the models is the ability to examine different performance aspects of the power distribution system, e.g. sizing of electronic filters in the motor drive, as a function of propeller shaft acceleration. The method presented in this paper is in general applicable to both conventional and hybrid electric propulsion systems. Furthermore, appropriate use of the models and the analysis tool can facilitate integration study as the power system is integrated with the propulsion aspects allowing evaluation of the power plant capability and operational requirements against the ship‟s hull dynamics. INTRODUCTION Advances in power electronics have contributed to the rapid growth in utilization of electric drive technology in commercial and naval marine industries. Evolution of external, podded electric propulsors has been a major impetus to the application of all-electric propulsion system in new commercial ships and currently some naval vessels. These technologies coupled with commercial availability of high power, variable frequency converter drives enabled the evolution to all-electric ships in which propulsion and auxiliary systems are powered by common electric power sources through a unified architecture (NRAC 2002). In traditional ship designs, up to 90% of installed power (electrical and mechanical) is dedicated solely to propulsion and not available for operating other power consuming such as weapon and sensor systems (NRAC 2002). As the US and international Navies move toward electric propulsion and ultimately all-electric warship, there is the need to redirect electric power from ship power/propulsion to support high-power weapon and sensor systems in order to realize the full war fighting capabilities. For
Transcript of An Approach to Modeling and Analysis of Propulsion Electric Drives · 2015-12-07 · Troy V....

Troy V. Nguyen, Donald C. Simon, Northrop Grumman Corporation – Electronic Systems,
Naval & Marine Systems Division, Charlottesville, Virginia USA
An Approach to Modeling and Analysis of Ship Propulsion
Electric Drives
ABSTRACT
Design of high-performance electric propulsion
systems requires thorough dynamic analysis of
both the electric power and propulsion systems.
This paper presents a simple but effective
method to model the relevant components in the
electric and propulsion plants to facilitate the
integration and analysis of the entire system for
the purpose of predicting the overall system
performance. The objective is to illustrate an
approach to integrate the electric and propulsion
subsystems in a modeling and simulation
environment that can potentially expose
alternatives in component design.
By way of examples, the paper addresses
modeling, analysis, and validation of electric
motor propulsion systems as well as hybrid
systems that consist of a gas turbine engine and
an electric motor driving the same propeller
shaft. An instance of the hybrid propulsion
systems is the LHD 8 propulsion design
discussed in a recent conference publication by
the NAVSEA engineering staff. A specific issue
in the hybrid propulsion system is the starting of
a shaft on electric drive and then clutching in the
gas turbine engine. This scenario exists in the
system due to differences in operational speed
range and performance dynamics of the gas
turbine and the electric motor. Using the
resulting system model, the examples in the
paper will demonstrate the behavior of the
subsystems based on this particular scenario.
The dynamic models under consideration are
representative of the actual systems and are
sufficiently robust for use in a preliminary
design analysis of electric propulsion drives. An
added benefit of the models is the ability to
examine different performance aspects of the
power distribution system, e.g. sizing of
electronic filters in the motor drive, as a function
of propeller shaft acceleration. The method
presented in this paper is in general applicable to
both conventional and hybrid electric propulsion
systems. Furthermore, appropriate use of the
models and the analysis tool can facilitate
integration study as the power system is
integrated with the propulsion aspects allowing
evaluation of the power plant capability and
operational requirements against the ship‟s hull
dynamics.
INTRODUCTION Advances in power electronics have contributed
to the rapid growth in utilization of electric drive
technology in commercial and naval marine
industries. Evolution of external, podded
electric propulsors has been a major impetus to
the application of all-electric propulsion system
in new commercial ships and currently some
naval vessels. These technologies coupled with
commercial availability of high power, variable
frequency converter drives enabled the evolution
to all-electric ships in which propulsion and
auxiliary systems are powered by common
electric power sources through a unified
architecture (NRAC 2002).
In traditional ship designs, up to 90% of
installed power (electrical and mechanical) is
dedicated solely to propulsion and not available
for operating other power consuming such as
weapon and sensor systems (NRAC 2002). As
the US and international Navies move toward
electric propulsion and ultimately all-electric
warship, there is the need to redirect electric
power from ship power/propulsion to support
high-power weapon and sensor systems in order
to realize the full war fighting capabilities. For

this to occur what is required is common power
system architecture that is both flexible and
robust to permit dynamic allocation of large
amounts of power from ship‟s service and
propulsion systems to advanced electric
weapons, sensors and countermeasures (NRAC
2002).
To achieve the all-electric ship objective, system
designers need to understand the relationship
among different power-consuming ship systems
and their interfaces to the electric power
generation, distribution and management
subsystems. The design can be better assessed
with mathematical models of the systems
developed for analysis so that the impact of one
system on another can be readily analyzed.
In this paper we focus on a hybrid electric
propulsion configuration where either the gas
turbine or electric motor drives the propeller
through a reduction gear and clutch
arrangement. Electric propulsion and auxiliary
systems include the electric propulsion motors,
motor controllers, and the auxiliary systems that
provide services to the ship and its systems. Our
primary objective is to present an approach for
modeling and analysis of these hybrid electric
propulsion system components to facilitate
model reuse and to minimize the effort for
model validation for different system
configuration. The basic sequence of events in
model development is:
Determine a suitable mathematical
description of the problem. The description
should be physically realistic and fit for the
application purpose. This means that the
model should reproduce the required physics
at the required fidelity. In some instances, a
steady-state model is sufficient. In other
cases, a simple linear transfer function is
sufficient. More generally, more complex,
possibly non-linear, dynamic models are
required.
Define clearly the interfaces of the system
components. For example, a model of a
rotating machine can often be implemented
with any two of power, torque and speed as
either input or output. It is necessary to
select a convention for each component
before developing the model to keep avoid
mismatch of signal physical quantities
during the modeling process.
Identify the parameters that will govern the
detailed behavior of the component. While
it is not necessary to determine all
parameters values precisely before model
development, but it is useful to have a good
idea of what parameters will be required
and, if possible, have a rough idea of the
likely range within which the system
parameters will lie.
Treat a large, complex system in a
hierarchical manner. It is prudent to break
the system down into smaller, more
manageable sub-systems. For each sub-
system, follow the same development rules
as for the components.
HYBRID ELECTRIC
PROPULSION SYSTEMS
FIGURE 1 illustrates a representative hybrid
electric configuration for a twin-shaft ship
propulsion plant and its control systems. The
propulsion motors can be either DC or AC
motors, both of which will be discussed in the
subsequent sections. FIGURE 2 illustrates a
hybrid electric propulsion system design. In this
hybrid design, the primary propulsion device is
the gas turbine engine at high ship speeds. The
electric motor is an auxiliary driver that is
utilized for loitering speeds. For the analysis
purpose, it is assumed that the system is driven
at high speeds by the gas turbine and can be
driven by either the electric motor or the gas
turbine at low speeds but not by both. The
transition between the gas turbine and electric
motor is accommodated by the two-stage
reduction gear with self-synchronizing clutch for
each of the prime movers. The system
configuration in FIGURE 2 can also represent a
bi-directional hybrid drive where propulsion
motor acts as a generator (driven by the gas
turbine), and with appropriate power electronics
design, supplies electric power feeding into the
ship electrical plant bus.

FIGURE 1: Representative Ship Propulsion Plant Configuration
FIGURE 2: Propulsion Hybrid Electric Drive

It should be mentioned at this point that the
primary focus of this paper is to analyze the
hybrid drive system performance in the
“propulsion only” mode. This work will provide
a solid basis for carrying out additional
modeling and analysis of power transmission or
conversion of the ship power. The propulsion
and electric plant components shown in
FIGURE 1 and FIGURE 2 emphasize the
interconnection between the ship propulsion and
the power generation plant and the conversion
and distribution to other ship systems.
PROPULSION SYSTEM
COMPONENT MODELING
This section of the paper presents the
mathematical description of the various
components in the propulsion plant.
Propeller:
The propeller can be modeled in terms of torque
and thrust coefficients, both expressed as a
function of J′, the modified advance coefficient.
This relationship is expressed in FIGURE 3 and
the equations below. The propeller torque and
thrust are computed by interpolating steady-state
maps where torque and thrust coefficients model
consists of test data for a range of ahead and
astern values of ship speed and pitch ratio (for
ship with controllable pitch).
22'
),'(
),'(
nDV
VJ
PRJfK
PRJfK
a
a
q
t
Where,
Kt = Propeller Thrust Coefficient
Kq = Propeller Torque Coefficient
Va = Speed of advance (ft/sec)
n = Propeller Speed (Rev/sec)
D = Propeller Diameter (ft)
PR = Propeller Pitch Ratio (dimensionless)
J′ = Modified Advance coefficient
(dimensionless)
The curves are implemented as look -up tables
(LUT). The LUTs would normally be derived
from reduced scale tank tests. The modified
advance coefficient more easily allows
simulating cases where the propeller shaft is
locked (n = 0).
FIGURE 3: Propeller Model Block Diagram
Another way of representing the propeller is
simply using steady-state look-up tables relating
the shaft RPM to developed torque and thrust.
Another look-up table can be used to relate
developed power to ship speed through the
water. This alternative propeller model is then
described simply by two LUTs.
Line Shafting:
The model for the transmission assembly
account for the Main Reduction Gear and line
shafting characteristics that include the gear
ratios, drive train moments of inertia, and all
transmission losses.
In many cases, the shaft can be considered to be
point inertia. The shaft model is very simple:
Net torque acting on the shaft is the difference
between that supplied by the prime mover(s),
and the load presented by the propeller, plus any
losses represented by a viscous friction due to
the bearings and windage. This relationship is
illustrated in the block diagram in FIGURE 4
and the equations below.
Basic equation
dt
dNKTNKTT s
AsdLPM
TPM = Prime Mover Torque
TL = Propeller (Load) Torque
TA= Net torque
K = Total inertia (shaft, propeller)
Kd = Viscous friction coefficient
Ns = Shaft rotational speed

FIGURE 4: Line Shafting Model Block Diagram
For a long shaft, it may not be appropriate to
lump the entire inertia of the shaft into a single
point. Long shafts can be modeled with a
number of flexible elements. A distributed
approach can be taken by effectively
implementing a set of difference equations (in
the axial direction only therefore remaining a
one dimensional problem keeping the
complexity down). The complete shaft is then
treated as a number of elements.
Couplings:
Shaft couplings can be modeled as torsional
springs. Damping term should be included, as
one of the purposes of the couplings is to
attenuate vibration. A simple linear spring may
be sufficient, but if nonlinear behavior is
required (i.e. the spring stiffening as its angular
displacement increases), a more sophisticated
model may be necessary. The torsional spring is
parameterized by the „simple‟ linear stiffness,
and details of how the spring stiffens as it
exceeds its linear operating range. FIGURE 5
illustrates a detailed schematic of the
connections between the prime movers (gas
turbine & electric motor) to the gear and
propeller assemblies. Based on this schematic,
equations of motion can be written to describe
the coupling behavior between the various
components attached to the drive train (Parker
and Garvey, 1972).
Gas
Turbine
Electric
Motor
Im
Cc1 Ks
Cs
Cp
Igear2
Ig
∆Nm ∆Tm
∆Nt ∆Tt
Kc1
Kc2
Cc2
∆N1
∆N2
∆Np∆Ns
Igear3
Igear1
FIGURE 5: Power Transmission Block Diagram
∆Nm, ∆Nt = Motor, Turbine speed deviation
relative to rated speed
∆Tm, ∆Tt = Motor, Turbine torque deviation
relative to rated torque
Im, Ig = Motor, Turbine moment of inertia
Igear1, Igear2, Igear3 = Gear box moment of inertias
Kc1, Kc2 = Motor, Turbine coupling torsional
stiffness
Ks = Propeller shaft torsional stiffness
Cc1, Cc1 = Motor, Turbine coupling damping
coefficients
∆Ns = Propeller shaft speed deviation relative to
rated propeller speed
∆Np= Propeller speed deviation relative to rated
propeller speed
Cs = Propeller shaft coupling damping
coefficient
Cp = Propeller shaft damping coefficient
∆N1, ∆N2 = Coupling shaft speed deviation
relative to rated speed
Gearing:
Reduction Gear
The gearbox can be modeled as point inertia,
accelerated by the net torque, i.e. the difference
between the torque applied on the drive shaft
minus that the torque delivered by the driven
shaft. It is important to reflect the inertias and
torque through the gearbox – this means scaling
by the gear ratio. The gearbox can be
parameterized in terms of the gear ratio, and the
inertias of the input and output shafts.

Combining Reduction Gear
A two input combining gearbox can be modeled
by considering the two separate shafts. Each
half is modeled from the point of view of the
torque input to each shaft – there are three terms
in the torque balance (the two input torques, and
the one load torque).
Combining Reduction Gear with Clutch
This model considers a clutch on either or both
input shafts. For a single clutched shaft this
means that there are only two states the system
can be in – engaged, or disengaged. If a clutch
is modeled on the other input shaft too, then
there would be 4 possible states. As for the
single shaft gearbox, when engaged the dynamic
model looks the same as the gearbox model
without a clutch. When disengaged, the de-
clutched shaft has only its own inertia to
accelerate. The other shaft still transmit torque
to the load – the model of this part of the system
now looks like the gearbox model for the single
input shaft.
Ship Hull:
There are a variety of ways of modeling the
motion of the ship through the water. They all
amount to a model of net thrust, made up of
propulsive thrust from the propeller, and drag.
Total drag comprises a superposition of a
number of contributors.
Hull Resistance: Ship speed/resistance
relationship for both ahead and astern. The hull
resistance as a function of ship speed is typically
documented in lookup tables for various ship
conditions, e.g., deep or light condition:
)( ss VfR
Where Rs is the hull resistance and Vs is the
ship‟s speed.
The ship acceleration is proportional to the sum
of the effective thrust of the propeller, minus the
ship resistance:
)( sRTM
g
dt
dV
T is the propeller thrust, M is the ship
displacement, which includes an added entrained
water mass, and g is the gravitational constant.
Thrust Deduction and Wake Fractions: The
wake and thrust deduction factors describe the
interaction between the hull and the propellers.
These factors (for both ahead and astern
directions) are usually determined through self-
propulsion tests or from full-scale power trials of
similar ships.
Wake fraction:
s
as
V
VVw
Where Vs is the ship speed and Va is the relative
speed of the propeller.
Thrust deduction factor (1-t):
21
)1(TT
Rt s
Where t is the thrust-deduction coefficient.
This particular model uses the concept of
„effective power‟ to quantify the total drag. This
is the power required to drag the ship through
the water at a given speed. Any thrust from the
propulsion system that exceeds the effective
power is available to accelerate the ship. If there
is insufficient thrust to match the effective
power, then the ship must decelerate. The
model is parameterized by a few simple values,
the most important of which is the speed-to-
effective- power look-up table.
Gas Turbine and Controller:
Gas turbines are complicated systems and
require slightly more sophisticated models. A
simplified approach is to use a representative
model of the gas turbine with look-up tables that
characterize its performance as a function of
engine speed and load. Such models are specific
to a particular gas turbine, and it is likely that the
turbine manufacturer can provide the model (or
failing that, then the LUTs that characterize the
machine).

In the absence of such a LUT-based model, a
simple aero-thermal model utilizing constant
specific heats and ratio of specific heat (gamma)
values can be used. For this type of model, a
compressor map of pressure ratio, mass flow and
efficiency as functions of corrected compressor
speed (NGGR) are required. In addition, maps
of turbine flow rate as a function of pressure
ratio are necessary. The pressure ratio across the
turbine determines the temperature drop, which
in turn determines the work output. The
compressor, combustor and turbines are treated
as point components while the inter component
plenums are treated as volumes. Details of this
modeling technique are given in (Walsh and
Fletcher, 2004) and (Camporeale, Fortunato, and
Mastrovito. 2006). The turbine flow rate, in the
absence of a machine specific map, can be
estimated by utilizing a simple Stodola ellipse
function combined with the pressure drop across
the turbine. A typical ellipse function is given
in Chapter XVII of the publication
“Aerodynamic Design of Axial Flow
Compressors” (NASA, 1965).
The controller model contains a simple start
sequencing routine typical in gas turbine
applications. Upon receipt of a Start Command,
the start sequencer first engages the starter
motor. When ignition speed is reached, the start
sequencer opens the fuel shutoff valves (FSOV)
and energizes the igniters. A fixed amount of
fuel is fed into the engine. If the combustor
loading and fuel-air ratio (FAR) are within the
ignition zone, the model assumes combustion is
present and adds heat from the fuel. When self
sustaining speed is reached, the starter and
igniter are deactivated. Concurrently, a gas
generator speed Proportional-Integral-
Differential (PID) controller is activated and gas
generator speed demand is ramped up towards
idle speed. When idle speed is reached, the gas
generator speed demand input is handed over to
the external control system input. The controller
model also incorporates an emergency stop (E-
Stop) capability, where the FSOV are closed
immediately, and a normal stop (N-Stop)
capability, where the engine is brought to idle
speed for a specified cool down period before
FSOV closure. This last capability is needed
when investigating transitions between gas
turbine and electric propulsion motor modes.
For transients, the controller model should
include some sort of maximum and minimum
allowed fuel schedules. These limiting schedules
can be implemented as lookup tables of fuel
flow as functions of NGGR, compressor
discharge pressure (P3) and compressor
discharge temperature (T3) (Walsh and Fletcher,
2004). Anti-windup protection should be built
into the controller model to prevent the PID
controller from integrating past the fuel limits.
In addition, any protective functionality which
may impact the analysis should be included. A
typical protective functionality, which may
impact both transient and steady state analyses,
is the power turbine speed limiting.
The above proposed approach to modeling the
gas turbine provides a generic and indicative
model for a preliminary dynamic analysis. For
detailed study, it may be replaced with a
machine-specific version.
Electrical Motors:
All motor models are electro-mechanical in
nature and can be split into an electrical and a
mechanical part.
DC Motor & Drive
A DC motor can be represented by a very simple
model. For a DC motor, the electrical model is
just a series combination of resistance and
inductance, representing the motor armature.
The model also includes a current measurement
device, and a voltage source used to develop the
back electromotive force (EMF). The
magnitude of the back EMF is proportional to
the rotational speed of the machine. The
constant of proportionality is the motor constant.
The armature current measurement is required
because the torque developed by the machine is
proportional to the armature current. The
constant of proportionality is the torque
constant. This torque is available to accelerate
the machine rotor. Load and friction torques
oppose the acceleration.

DC motors are controlled by adjusting the
voltage applied to the armature. Motors usually
require some form of control. Constant speed
and constant power are two common control
modes. A standard approach with DC motors is
to use a cascade controller to achieve constant
speed operation. The first stage compares the
actual speed against a set value reference speed,
and outputs the corresponding desired armature
current. The second stage compares the desired
armature current against the actual armature
current, and adjusts the motor armature voltage
accordingly. Simple PI control is sufficient for
the speed controller. For the current controller,
a simple relay is all that is required.
AC Motor & Drive
The principle of modeling AC machines is
similar to that of DC machines where a basic set
of differential equations govern the combined
electro-mechanical behavior. The primary
difference is that AC machines require a 3-phase
(or multi-phase) power supply inputs.
Taking the synchronous machine model as an
example, these models are quite complex and
are therefore parameterized by a large number of
distinct parameters. There are a few variations
on the general theme of the synchronous
machine – for example, they come in two
„flavors‟ – salient pole and round rotor.
The models are however quite standard, and the
equipment suppliers should be able to provide
values for these parameters that are reasonably
accurate. Dynamic models for synchronous and
induction motors and motor drives are also
readily available in the published literature and
in a large number of textbooks.
Variable Speed Drive
If the propulsion system is to permit electric
drive over a range of frequencies, including very
low frequencies (i.e. for starting an initially
stationary propeller shaft) then a variable speed
drive (VSD) is required. This takes fixed
frequency AC in, and produces variable-
frequency AC out, to supply the motor.
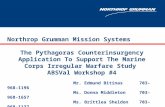
As shown in FIGURE 6, a typical VSD consists
of two stages:
Rectification (rectifier) – the AC input
supply is converted to DC
Inversion (switch-mode converter) – the DC
is converted back to AC.
+
-
Controller
Motor
Power sourceswitch-modeConverter
capacitor
rectifier
FIGURE 6: Electric Drive Power Processing
The operation of the switch-mode converter is
manipulated by a feedback controller as shown
in FIGURE 6.
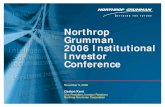
FIGURE 7 illustrates the concept of the
induction motor drive control for the LHD 8
propulsion auxiliary motor (Turso et.al, 2010,
reused with permission). The drive internal
processor implements a traditional field-
oriented, flux-vector control technique.
Measured 3-phase currents (A,B,C) are
transformed into a 2-phase reference frame of
direct and quadrature axes (D,Q), in which the
control algorithm functions. This transformation
allows the current producing torque to be
decoupled from the current producing the
magnetic field in the motor and greatly
simplifies the control implementation.
Additional coordinate transformation
calculations are required for each control
processing cycle and the accuracy of
transformations depends on accurate estimations
of the rotor field position. For control, the
magnetizing current (D-axis current) is held
approximately constant and the output torque is
altered by changing the torque current (Q-axis
current) commands to the VSD. These current
demands are converted into switching signals
with result in a change in motor input voltage –
with subsequent current drawn by the motor to
supply the required amount of torque to support
the motor operation. Measured current is fed
back to the controller after first being
transformed into the D-Q reference frame.

FIGURE 7: LHD 8 Auxiliary Propulsion Motor Drive Schematic (Turso, et al., 2010, reused with permission)
An Approach to Modeling the LHD
8 Propulsion System
The following section outlines an approach to
modeling the LHD 8 propulsion system based
on the system configuration described in Dalton
et.al. (2002). The paper was presented at an
unclassified conference in the UK in April 2002.
Configuration of the LHD 8 System
The power and propulsion system is CODLOG
– Combined Diesel Electric OR Gas. There is
no intention to run the electric motor in parallel
with the gas turbine.
The complete system comprises
The ship is 40,500-ton displacement,
844 feet in length.
Twin shaft CPP propellers.
One main LM2500+ gas turbine, rated
35,000 HP (26.1 MW) per shaft, at 3600
rpm. The gas generator is rated at a
pressure ratio of 23.3:1 and a mass flow
rate of 186 lbm/sec at a corrected gas
generator speed of 9586 RPM (Wadin,
Wolf, and Haase, 2004).
One electric Auxiliary Propulsion
Model, rated 5000 HP (3.7 MW) per
shaft, at 1800 RPM
One combining gearbox, two inputs, per
propeller shaft. Gear ratio 20:1 with the
gear ratio the same on the two input
shafts. Both input shafts are clutched
with overrunning clutches.
Two diesel generators per propulsion
motor rated 4 MW each.
One Variable Speed Drive (VSD) for
each electric propulsion motor. The
drive is isolated by a transformer from
the DGs that supply it.
Two additional diesel generators whose
primary role is to supply ship‟s service
load. These DGs can be connected to the
propulsion system if necessary.

Main power distribution bus consists of
port and starboard longitudinal 4160 V
AC bus.
Zonal electrical distribution system
(ZEDS) – local 4160/450 VAC
transformers.
Approach to Model Development
Before developing a model, it is necessary to
determine what useful output is to be extracted
from the model, and hence the appropriate level
of detail. Issues of concern in the context of the
LHD 8 model may include (Dalton et. al, 2002):
Steady-state powering under gas turbine
and diesel-electric propulsion.
Performance of the system under trail-
shaft and locked shaft operation.
Response of the system to severe, but
controlled, transient events such as crash
stop.
Response of the system to severe and
uncontrolled events such as tripping out
of a prime mover, emergence of a
propeller shaft from the water during
high sea state, short circuits in the
electrical distribution system.
Load sharing of diesel generators under
diesel-electric propulsion.
Transition from gas turbine to diesel-
electric propulsion and from diesel-
electric to gas turbine propulsion.
Starting a stationary shaft under diesel-
electric propulsion.
Synchronization of diesel generators as
additional generation capacity is brought
on line.
Balancing supply and demand using the
management system.
Handling the connection of the ship‟s
power distribution system to shore
supply.
The modeling aspects listed above is not
exhaustive and will require further analysis to
determine more precisely what is required from
the model. This will help establish the range of
scenarios that have to be simulated, and the
measurements that must be extracted from each
scenario. From this, we can determine the scope
of the model and the fidelity with which
individual components should be modeled.
ANALYSIS AND SIMULATION
The simulation model constructed for this paper
falls into the isolated system category. The hull
is modeled as a simple surge model in calm seas.
Both the port and starboard shafts are modeled
and thus can interact with each other via the hull
surge model. Propulsion prime mover start and
stop capability is provided for all prime movers.
Locked shaft, trail shaft and powered shaft
conditions can be simulated.
The gas turbines are modeled as simple aero-
thermal models. The interface between the gas
turbine simulation model and the control system
logic is via inputs of start, stop and gas generator
speed commands, and via model output
feedbacks of engine run status, clutch status and
propeller shaft speed. The control system
modulates its gas generator speed command in
order to attain the desired propeller shaft speed.
The Variable Speed Drive (VSD) is modeled as
a simple PI controller (with limiters) and a feed-
forward gain. During this study, it was found
that the typical bandwidth of a motor drive is
much higher than that of the remaining
propulsion subsystems and that it was not
necessary to use the detailed motor drive model
outlined in previous sections for this analysis.
The interface between the VSD and the control
system logic is via inputs of start, stop and
motor speed reference commands, and via model
output feedbacks of VSD run status, clutch
status and propeller shaft speed. The control
system is essentially “open loop” with regards to
shaft speed as it simply generates the motor
speed reference. The VSD model modulates the
generated torque in order to maintain motor
speed.
The gearbox model contains the descriptions of
the overrunning clutches and thus controls
which shaft dynamic model is used for each
prime mover.

FIGURES 8, 9, and 10 are top-level block
diagrams of the system models in Simulink®.
Two scenarios were chosen for this model. The
first scenario is a gas turbine start followed by a
crash- ahead transient then a crash astern
transient. The second scenario is a transition
from gas turbine operation to motor operation.
FIGURE 11 captures the gas turbine start, shaft
breakaway and acceleration to idle ( time 0 to
time 100 sec), a crash ahead maneuver starting
at time 150 sec, and a crash astern maneuver
starting at time 250 sec. The gas turbine
controller‟s power turbine speed limiting
function is activating during the crash astern
maneuver (after about time 300 sec), indicating
further refinement of the shaft speed control
algorithm is necessary.
FIGURE 12 illustrates the transition from gas
turbine operation to auxiliary control operation.
The ship is initially at 10 knots on gas turbine
propulsion when the Auxiliary Propulsion
System (APS) is ordered on-line at time 1000
sec. The control system responds to the APS on-
line order by ordering the gas turbine to normal
stop while simultaneously bringing the motor up
to speed. During the gas turbine cool-down
period (reduced here to 60 sec) both prime
movers are clutched into the reduction gear and
provide propulsion power. At the end of the gas
turbine cool-down period (time 1060 sec) the
fuel valves to the gas turbine are closed, rapidly
shutting down the engine and transferring all
propulsion load to the motor. Variations in
motor and propeller shaft speed during the
transition are evident.
FIGURE 8: The Propeller Shaft Simulation. This figure shows only one propeller shaft, the other side being
functionally identical.

FIGURE 9: The Gas Turbine and its Engine Control Unit (ECU).
FIGURE 10: Gas Turbine Model. This model was developed from (Walsh, et. al, 2002) and (Caporeale, et.
al., 2006)

FIGURE 11: This simulation run captures the gas turbine start, shaft breakaway and acceleration to idle (
time 0 to time 100 sec), a crash ahead maneuver starting at time 150 sec, and a crash astern maneuver
starting at time 250 sec. The gas turbine controller’s power turbine speed limiting function is activating
during the crash astern maneuver (after about time 300 sec), indicating further refinement of the shaft speed
control algorithm is necessary.

FIGURE 12: The ship is initially at 10 knots on gas turbine propulsion when the Auxiliary Propulsion System
(APS) is ordered on-line at time 1000 sec. The control system responds to the APS on-line order by ordering
the gas turbine to normal stop while simultaneously bringing the motor up to speed. During the gas turbine
cool-down period (reduced here to 60 sec) both prime movers are clutched into the reduction gear and
provide propulsion power. At the end of the gas turbine cool-down period (time 1060 sec) the fuel valves to
the gas turbine are closed, rapidly shutting down the engine and transferring all propulsion load to the
motor. Variations in motor and propeller shaft speed during the transition are evident.
HYBRID ELECTRIC DRIVE
INTEGRATION STUDY
An adequate simulation model can provide
useful information to steady state and transient
performance of the control system. Control
schedules, gains, set points and limits can be set
based on the predicted performance. Severe
transients such as crash back maneuvers may
reveal areas where the control system is
inadequate and requires redesign, or at least
retuning. It is far better to detect such issues as
early as possible in the design process, rather
than after control system deployment to the
actual platform. The simulation models above
were developed with this purpose in mind. The
next step is to enhance the model further to
include the models of electric power flows
between the propulsion plant and electric plant.
This will in effect allow the model to be used in
bi-directional hybrid drive system analysis.
Utilizing the basic building blocks presented
above, it will be relative easy to construct and
examine various system alternative

configurations. It is also feasible to build in
reconfiguration into a single model. However,
this would add to the complexity of the task. It
is typically better to start with models of fixed
configuration, and to add the flexibility to
reconfigure subsequently. It is recommended
that a step-wise approach be taken, i.e. looking
at two particular configurations, before
developing a fully flexible re-configurable
model. Using the LHD 8 system as an example,
the following approach should be considered.
Isolated System: Start with the simplest
configuration of an isolated system, where each
shaft is powered by either gas turbine or diesel
electric. When under electric drive, the two
diesels can be paralleled together, but not
connected to the rest of the power distribution
system. In this configuration, two separate
models are required:
The propulsion system model consists of gas
turbine, gearbox, electric propulsion motor,
variable speed drive and one or two diesel
generators. The output of the gearbox drives
the shaft, which in turn propels the ship. The
port and starboard sides of the system can be
considered to be identical.
The ZEDS comprises two diesel generators
supplying the main 4160 VAC distribution
bus on port and starboard sides, with
suitable transformers and hotel load
representing each zone. For this
configuration, two separate models will be
required, but the complexity of each model
is relatively low. If trailing shaft is to be
modeled, then it will be necessary to
explicitly model the port and starboard
shafts separately, but by definition with
trailing shaft there will be no requirement to
model the power and propulsion system that
supplies the trailing shaft, as it is shut-down.
However, there may be a requirement to
model the „picking up‟ of a trailing shaft
when transitioning from cruise to full
propulsion. This model will allow the
investigation of propulsion system behavior
without interaction with the rest of the
power system – issues that can be addressed
include steady-state propulsion, transition
from gas to diesel electric, load sharing
between the two DGs per motor, cold start
under electric drive, operation of the
variable speed drive.
Parallel System:
At the other end of the range of complexity is
the full paralleled system, with cross-connects
between the propulsion and distribution
networks. A model of this system would
comprise the two separate models discussed
above, connected together electrically. Also, the
propulsion system model would be „doubled up‟
to explicitly represent the port and starboard
sides. This model will allow the investigation of
issues concerned with interactions between the
propulsion and power generation systems. It
could include the effects of harmonic distortion,
short circuit behavior etc., if the VSD model has
sufficient fidelity to include such effects.
Variable Configuration System:
Finally, the paralleled model should be further
modified by addition of circuit breakers to make
it reconfigurable within the simulation. This will
allow transients such as paralleling of
generators, behavior under short circuit or other
fault conditions, to be investigated, as well as
the behavior of the platform management system
to be simulated in the presence of realistic
dynamic models of the plant under its control.
CONCLUSION
This paper presents a simplified and methodical
approach to developing component models of a
large ship propulsion system having an auxiliary
motor drive. The approach utilizes available
published information to model physical
behavior of various system components. The
paper uses the LHD 8 propulsion design
parameters in an example to illustrate the
modeling, analysis, and validation of hybrid
propulsion systems. The dynamic models are
representative of the actual systems and
determined to be sufficiently robust for use in a
preliminary design analysis.
The dynamic models presented above provide
the capability to quickly prototype a system

simulation for a first-cut response analysis. The
proposed technique illustrates an approach to
facilitate the integration the electric and
propulsion models that can provide insight into
system dynamic behaviors.
For the “propulsion only” mode, the models
described are sufficient to obtain reasonable
prediction of the steady-state and transient
response of the ship speeds when under gas
turbine driven mode, during transitioning, or
under electric motor driven mode. For the
motor and motor drive, it was determined that
the models can be greatly simplified because
their dynamics are so much faster than the rest
of the components in the system.
A potential enhancement to the proposed model
is to include capabilities to examine different
performance aspects of the power
generation/distribution system, e.g. sizing of
electronic filters in the motor drive, as a function
of propeller shaft acceleration, and the power
exchange between the propulsion and electric
plants. The goal should be to develop a
sufficiently robust analysis tool for use in
extensive integration study of hybrid electric
propulsion systems.
REFERENCES
Camporeale, S. M., Fortunato, B. and
Mastrovito, M, “A modular Code for Real Time
Dynamic Simulation of Gas Turbines in
Simulink”, Transactions of the ASME, July
2006, Vol 128.
Dalton, Thomas, Boughner, Abe, Mako, David
C., Doerry, Norbert, “US Navy Amphibious
Assault Ship LHD 8: A Unique Hybrid
Propulsion Design”, Sixth International Naval
Engineering Conference and Exhibition, 2002.
The Institution of Electrical Engineers (IEE),
“The Control Techniques- Drives and Controls
Handbook”, 2001.
Naval Research Advisory Committee (NRAC),
“Roadmap to an Electric Naval Force” Report,
July 2002.
National Aeronautics and Space Administration
(NASA), “Aerodynamic Design of Axial Flow
Compressors”, 1965.
Parker, G.E. and Garvey, D.C., “Steady-State
Speed Oscillation of Intrenal Combustion
Engines”, ASME Paper 72-DGP-12, Diesel &
Gas Engine Power Conference & Exhibit, St.
Louis, MO., April 1972.
Turso, J., et al., “U.S.S. Makin Island Auxiliary
Propulsion System: Identification and
Accommodation of System-Level Interactions”.
ASNE Electric Machinery Technology
Symposium, Philadelphia PA, May 2010.
Wadia, A. R., Wolf, D. P., and Haaser, F. G.,
“Aerodynamic Design and Testing of an Axial
Flow Compressor With Pressure Ratio of 23.3:1
for the LM2500+ Gas Turbine”, Journal of
Turbomachinery, July 2004, Vol 124.
Walsh, Philip P. and Fletcher, Paul, “Gas
Turbine Performance”, Blackwell Science Ltd.,
2004.
AUTHORS’ BIBLIOGRAPHY ___________________________________
Troy V Nguyen, Ph.D, P.E., is an Advisory
Systems Engineer at Northrop Grumman –
Naval and Marine Systems Division in
Charlottesville, VA. For over 20 years, he has
been working in control design and analysis of
gas turbines, steam turbines, diesel engines, and
auxiliary systems for power generation and ship
propulsion applications. He received a BSME
and a MSME from the University of North
Dakota and a Ph.D. in Systems Engineering
from Colorado State University.
Donald C. Simon, is a Systems Engineer at
Northrop Grumman – Naval and Marine
Systems Division in Charlottesville, VA, where
he designed the propulsion control algorithms
for the LHD 8. He served in the U.S. Navy as a
nuclear propulsion qualified Surface warfare
Officer prior to joining Northrop Grumman. He
received a BSME from the University of
Virginia.